Embed Size (px)
Citation preview
Linear programming with interval right handsides
Linear programming with interval righthandsides
Nabila Remli
Lamsade, Université Paris Dauphine
Cost IC0602 International Doctoral SchoolSeptember, 17-21,2007, Han Sur Lesse, Belgium
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
Outline
1 Introduction
2 State of the artUncertainty on objective function coefficientsUncertainty in the LP coefficients
3 On going project: Uncertainty on right handsidesThe case of inequality constraintsThe case of equality constraints
4 Conclusion
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
Introduction
Outline
1 Introduction
2 State of the artUncertainty on objective function coefficientsUncertainty in the LP coefficients
3 On going project: Uncertainty on right handsidesThe case of inequality constraintsThe case of equality constraints
4 Conclusion
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
Introduction
Motivation
Optimization problems with uncertain data. For example, supplychain problems with unknown demand, uncertain costs,...
Classical approaches:Sensitivity analysis.Stochastic optimization: parameters need probability laws.Robust optimization: take into account, in the optimization, thevariation of the parameters.
Nabila Remli Linear programming with interval right handsides

Linear programming with interval right handsides
Introduction
Concepts and definitions
Uncertain parameter: a finite set of values or an interval number.A scenario is an assigned value to each parameter.The aim of robust optimization problem is to find a "relativelygood" solution for all scenarios.Classical criteria to mesure robustness: worst (best) casecriterion and maximum regret criterion.
ContextHere, we deal with linear programming with interval data.
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
State of the art
Outline
1 Introduction
2 State of the artUncertainty on objective function coefficientsUncertainty in the LP coefficients
3 On going project: Uncertainty on right handsidesThe case of inequality constraintsThe case of equality constraints
4 Conclusion
Nabila Remli Linear programming with interval right handsides

Linear programming with interval right handsides
State of the art
Uncertainty on objective function coefficients
Outline
1 Introduction
2 State of the artUncertainty on objective function coefficientsUncertainty in the LP coefficients
3 On going project: Uncertainty on right handsidesThe case of inequality constraintsThe case of equality constraints
4 Conclusion
Nabila Remli Linear programming with interval right handsides

Linear programming with interval right handsides
State of the art
Uncertainty on objective function coefficients
Works: Ben-Tal, Inuiguchi and Sakawa (1995), Kouvelis and Yu(1997), Mausser and Laguna (1998), Ramadan (2000), Averbakh andLebedev (2005) ...ect.
Formulation:
Let (Pc) denote the following linear problem: (Pc)
{min cxs.t x ∈ X
with:
c ∈ [c, c];
X being a nonempty bounded polyhedron.
NotationGiven a linear optimization problem P. The value of the optimalsolution of P is denotes v(P).
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
State of the art
Uncertainty on objective function coefficients
Classical criteria
1 Worst case criterionFor a solution x ∈ X , find the scenario that gives worst value:
fWOR(x) = maxc≤c≤c
cx
fWOR(x) is an upper bound for the value of x : absolute guarantee.
Then, the problem is to determine the solution xWOR ∈ X whichminimizes fWOR as follows:
fWOR(xWOR) = minx∈X
fWOR(x)
xWOR is the solution that gives the smallest upper bound.
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
State of the art
Uncertainty on objective function coefficients
Classical criteria
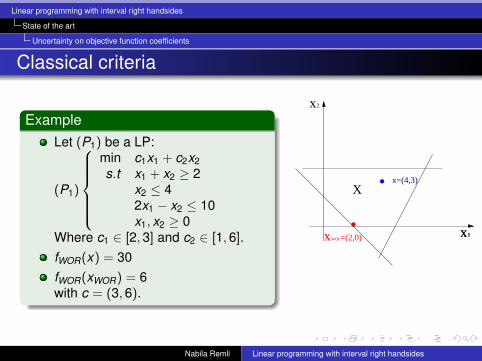
ExampleLet (P1) be a LP:
(P1)
min c1x1 + c2x2s.t x1 + x2 ≥ 2
x2 ≤ 42x1 − x2 ≤ 10x1, x2 ≥ 0
Where c1 ∈ [2, 3] and c2 ∈ [1, 6].fWOR(x) = 30fWOR(xWOR) = 6with c = (3, 6).
..
x1
x2
x
Xx=(4,3)
=(2,0)worx 1
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
State of the art
Uncertainty on objective function coefficients
Classical criteria
2 Best case criterionFor a solution x ∈ X , find the scenario that gives best value:
fBES(x) = minc≤c≤c
cx
Then, the problem is to determine the solution xBES ∈ X whichminimizes fBES as follows:
fBES(xBES) = minx∈X
fBES(x)
Less studied in decision theory, but provides an interestinginformation in robust optimization.
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
State of the art
Uncertainty on objective function coefficients
Classical criteria
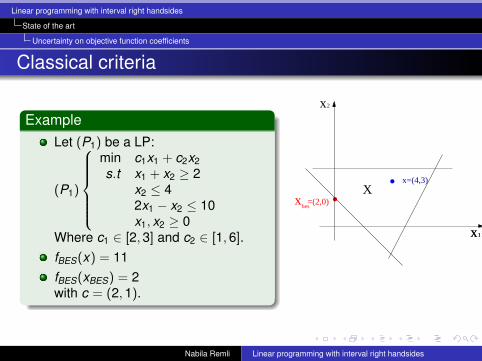
ExampleLet (P1) be a LP:
(P1)
min c1x1 + c2x2s.t x1 + x2 ≥ 2
x2 ≤ 42x1 − x2 ≤ 10x1, x2 ≥ 0
Where c1 ∈ [2, 3] and c2 ∈ [1, 6].fBES(x) = 11fBES(xBES) = 2with c = (2, 1).
..x1
x2
x
Xx=(4,3)
=(2,0)bes
x
1
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
State of the art
Uncertainty on objective function coefficients
Classical criteria
3 Maximum regret criterionThe regret associated to a fixed cost vector c and a solution x ∈ X , isgiven by: r(x , c) = cx − v(Pc)The maximum regret value of the solution x is:
fREG(x) = maxc≤c≤c
r(x , c)
fREG(x): greatest distance from optimality: relative guarantee.
The optimal solution according to the maximum regret criterion will bedenoted xREG and checks:
fREG(xREG ) = minx∈X
fREG(x)
fREG(xREG ) the smallest relative guarantee.
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
State of the art
Uncertainty on objective function coefficients
Classical criteria
Complexity results1 Worst case criterion: polynomial time problem (Averbakh and
Lebedev - 2005).2 Best case criterion: strongly NP-hard problem (Gabrel, Murat,
Remli - 2007).3 Maximum regret criterion: strongly NP-hard (Averbakh and
Lebedev - 2005). Moreover, the problem of computing fREG(x) fora specific x is also strongly NP-hard. Approximate algorithmshave been developed to solve this problem.
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
State of the art
Uncertainty on objective function coefficients
Bertsimas and Sim approach (2003)
In the objectif function: cj ∈ [cj , cj + cj ] where cj is the nominalvalue and cj ≥ 0 the deviation from the nominal value cj .New parameter Γ0 "budget of uncertainty": maximum number ofcoefficients that can deviate from their nominal value.
Γ0 = 0: nominal problem.Γ0 = n: worst case criterion.
The same complexity of the nominal problem.
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
State of the art
Uncertainty in the LP coefficients
Outline
1 Introduction
2 State of the artUncertainty on objective function coefficientsUncertainty in the LP coefficients
3 On going project: Uncertainty on right handsidesThe case of inequality constraintsThe case of equality constraints
4 Conclusion
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
State of the art
Uncertainty in the LP coefficients
Uncertainty in the LP coefficients
Bertsimas and Sim approach (2003)The same approach: for each constraint i , each coefficientδij ∈ [δij − δij , δij + δij ] where δij is the nominal value and δij ≥ 0the deviation from the nominal value δij .New parameter Γi : the maximum number of coefficients that candeviate from their nominal value in the constraint i .Same complexity as the nominal problem.
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
State of the art
Uncertainty in the LP coefficients
Uncertainty in the LP coefficients
Chinnek and Ramadan approach (2000)All coefficients are interval numbers.Find the best and the worst optimum. In minimization problem:
best optimum: the lowest minimum.worst optimum: the highest minimum.
It gives ”the range of variation of the objective function”.Different cases were separately studied depending of variablesigns (restricted or unrestricted in sign) and kind of constraints(equality or inequality constraints) but none complexity resultsnor general algorithm were given.
Nabila Remli Linear programming with interval right handsides

Linear programming with interval right handsides
On going project: Uncertainty on right handsides
Outline
1 Introduction
2 State of the artUncertainty on objective function coefficientsUncertainty in the LP coefficients
3 On going project: Uncertainty on right handsidesThe case of inequality constraintsThe case of equality constraints
4 Conclusion
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
On going project: Uncertainty on right handsides
Uncertainty on right handsides
MotivationIn real applications: stock management, flows problems,...the demand is often uncertain (not exactly known).In the corresponding LP modelization, this demandappears like RHS.
LP with uncertainty on RHS.
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
On going project: Uncertainty on right handsides
Uncertainty on right handsides
DifficultiesWhen uncertainty concerns RHS, the set of feasiblesolutions is not exactly known.A solution may not be feasible for all interval righthandsides. Especially, for problems with equalityconstraints.
How to do?Compute worst (best) optimum.Two cases: LP with inequality constraints and LP withequality constraints.
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
On going project: Uncertainty on right handsides
Uncertainty on right handsides
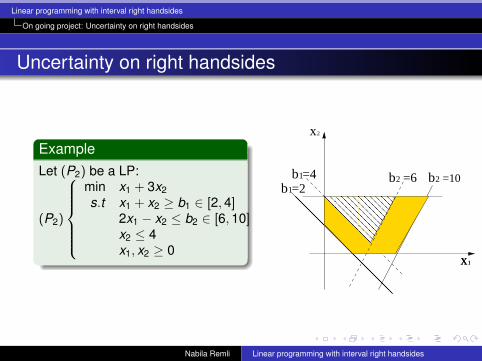
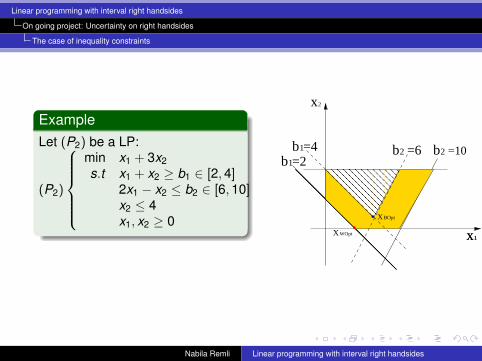
ExampleLet (P2) be a LP:
(P2)
min x1 + 3x2s.t x1 + x2 ≥ b1 ∈ [2, 4]
2x1 − x2 ≤ b2 ∈ [6, 10]x2 ≤ 4x1, x2 ≥ 0
=10
1x1
x2
1b2b2b1b =4 =6
x
=2
�����������������������������������
�����������������������������������
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
On going project: Uncertainty on right handsides
The case of inequality constraints
Outline
1 Introduction
2 State of the artUncertainty on objective function coefficientsUncertainty in the LP coefficients
3 On going project: Uncertainty on right handsidesThe case of inequality constraintsThe case of equality constraints
4 Conclusion
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
On going project: Uncertainty on right handsides
The case of inequality constraints
The case of inequality constraintsDefinition:
(Pb≥)
{min cxs.t Ax ≥ b
for each constraint i , bi ∈ [bi , bi ].
For all b ∈ [b, b], we denote X b≥ the nonempty bounded
polyhedron defined by {x ∈ Rn : Ax ≥ b}.
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
On going project: Uncertainty on right handsides
The case of inequality constraints
The case of inequality constraints1 Best optimum solution:
Determine the minimum value of the optimal solution of (Pb≥)
when b ∈ [b, b]. Solve the problem :
(B≥)
{min v(Pb
≥)
s.t b ≤ b ≤ b
Theorem(B≥) can be solved in polynomial time.
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
On going project: Uncertainty on right handsides
The case of inequality constraints
Proof.
(B≥)
{min v(Pb
≥)
s.t b ≤ b ≤ b
is equivalent to:
(B≥)
{min
b≤b≤bmin cx
s.t Ax ≥ b
Linear problem: min cxs.t Ax ≥ b
b ≤ b ≤ b
Nabila Remli Linear programming with interval right handsides

Linear programming with interval right handsides
On going project: Uncertainty on right handsides
The case of inequality constraints
The case of inequality constraints2 Worst optimum solution:
Find the maximum value of the optimal solution of (Pb≥) when
b ∈ [b, b]. The worst optimal solution problem is:
(W≥)
{max v(Pb
≥)
s.t b ≤ b ≤ b
Theorem(W≥) can be solved in polynomial time.
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
On going project: Uncertainty on right handsides
The case of inequality constraints
ExampleLet (P2) be a LP:
(P2)
min x1 + 3x2s.t x1 + x2 ≥ b1 ∈ [2, 4]
2x1 − x2 ≤ b2 ∈ [6, 10]x2 ≤ 4x1, x2 ≥ 0
x1x1
x2
1b2b2b1b
=2=4 =6 =10
XWOpt�����������������������������������
�����������������������������������
X BOpt. .
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
On going project: Uncertainty on right handsides
The case of equality constraints
Outline
1 Introduction
2 State of the artUncertainty on objective function coefficientsUncertainty in the LP coefficients
3 On going project: Uncertainty on right handsidesThe case of inequality constraintsThe case of equality constraints
4 Conclusion
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
On going project: Uncertainty on right handsides
The case of equality constraints
The case of equality constraintsDefinition:
(Pb=)
{min cxs.t Ax = b
bi ∈ [bi , bi ].
For all b ∈ [b, b], we denote X b= the nonempty bounded
polyhedron defined by {x ∈ Rn : Ax = b}
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
On going project: Uncertainty on right handsides
The case of equality constraints
The case of equality constraints1 Best optimum solution:
The best optimal solution problem is
(B=)
{min v(Pb
=)
s.t b ≤ b ≤ b
Theorem(B=) can be solved in polynomial time.
Nabila Remli Linear programming with interval right handsides

Linear programming with interval right handsides
On going project: Uncertainty on right handsides
The case of equality constraints
The case of equality constraints2 Worst optimum solution: The problem of determining the
worst optimal solution can be formulated as follows
(W=)
{max v(Pb
=)
s.t b ≤ b ≤ b
TheoremUsing a reduction from the problem of computing the maximum regretvalue for a given solution, we prove that (W=) is strongly NP-hardeven if variables are restricted in sign.
Nabila Remli Linear programming with interval right handsides

Linear programming with interval right handsides
On going project: Uncertainty on right handsides
The case of equality constraints
Element of proof
(W=)
{max v(Pb
=)
s.t b ≤ b ≤ b
equivalent to:
(W=)
{max
b≤b≤bmin cx
s.t Ax = b
According to the strong duality theorem:
(W=)
max bty
s.t Aty = ct
b ≤ b ≤ b
Quadratic problem.
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
Conclusion
Outline
1 Introduction
2 State of the artUncertainty on objective function coefficientsUncertainty in the LP coefficients
3 On going project: Uncertainty on right handsidesThe case of inequality constraintsThe case of equality constraints
4 Conclusion
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
Conclusion
Concluding remarks
When uncertainty is on RHS, Bertsimas and Sim approachis not relevant: one uncertain parameter per constraint.penalty model ↪→ Relation between worst (best) optimumand worst (best) case criterion.
Future worksWhat about maximum regret criterion?Find other criteria?What about discret set of value for RHS only?
Nabila Remli Linear programming with interval right handsides
Linear programming with interval right handsides
Conclusion
Concluding remarks
When uncertainty is on RHS, Bertsimas and Sim approachis not relevant: one uncertain parameter per constraint.penalty model ↪→ Relation between worst (best) optimumand worst (best) case criterion.
Future worksWhat about maximum regret criterion?Find other criteria?What about discret set of value for RHS only?
Nabila Remli Linear programming with interval right handsides





























