Embed Size (px)
Citation preview

Optimal Control
Lecture
Prof. Daniela Iacoviello
Department of Computer, Control, and Management Engineering Antonio Ruberti
Sapienza University of Rome

27/11/2015 Controllo nei sistemi biologici
Lecture 1
Pagina 2
Prof. Daniela Iacoviello
Department of computer, control and management
Engineering Antonio Ruberti
Office: A219 Via Ariosto 25
http://www.dis.uniroma1.it/
Prof.Daniela Iacoviello- Optimal Control

References B.D.O.Anderson, J.B.Moore, Optimal control, Prentice Hall, 1989 C.Bruni, G. Di Pillo, Metodi Variazionali per il controllo ottimo, Masson , 1993 L. Evans, An introduction to mathematical optimal control theory, 1983 H.Kwakernaak , R.Sivan, Linear Optimal Control Systems, Wiley Interscience, 1972 Prof.Daniela Iacoviello- Optimal Control
References
D. E. Kirk, "Optimal Control Theory: An Introduction, New
York, NY: Dover, 2004 D. Liberzon, "Calculus of Variations and Optimal Control
Theory: A Concise Introduction", Princeton University
Press, 2011 How, Jonathan, Principles of optimal control, Spring
2008. (MIT OpenCourseWare: Massachusetts Institute of
Technology). License: Creative Commons BY-NC-SA.
Prof.Daniela Iacoviello- Optimal Control
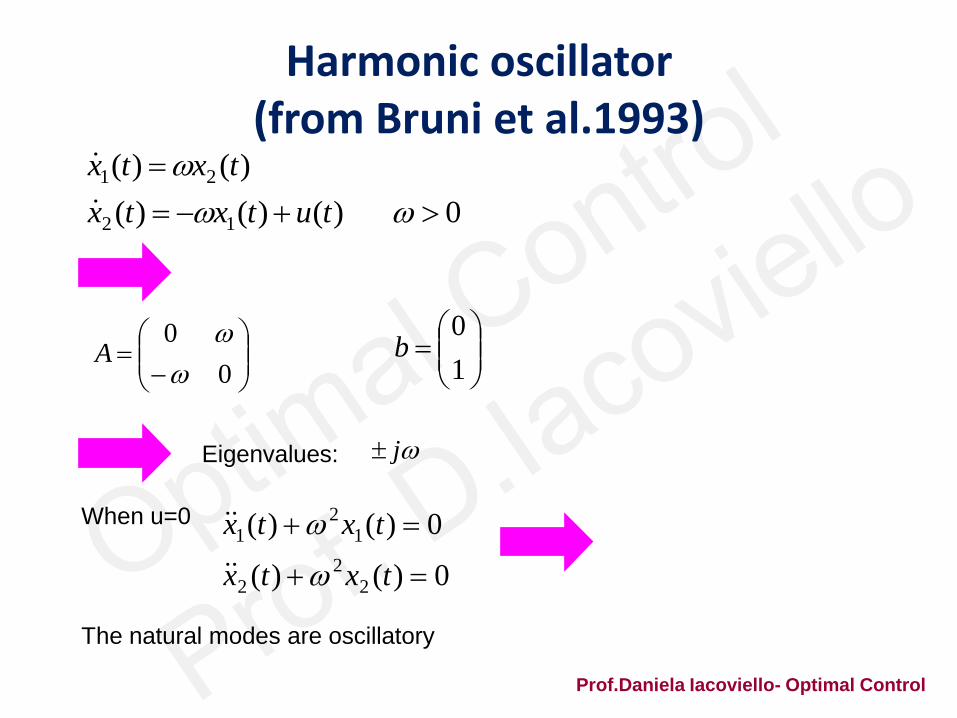
Harmonic oscillator (from Bruni et al.1993)
Prof.Daniela Iacoviello- Optimal Control
0)()()(
)()(
12
21
tutxtx
txtx
0
0
A
1
0b
jEigenvalues:
When u=0
0)()(
0)()(
22
2
12
1
txtx
txtx
The natural modes are oscillatory

Problem
Prof.Daniela Iacoviello- Optimal Control
1)(
0)()(
tu
txxtx fiiDetermine a control such that
That minimizes the cost index:
singularnot01
0
Abb
There exists a unique, non singular solution and the control
Is bang-bang for any initial condition
iff tttJ )(
Eigenvalues of A: j
of
oo tux ,,

Prof.Daniela Iacoviello- Optimal Control
)()()()()()(1 21221 tuttxttxtH
BUT
Since the eigenvalues are complex we can’t apply the theorem about the maximum
Number of commutation points
Alternative procedure:
Necessary conditions:
Introduce the Hamiltonian:
)()( tAt oTo
1)(:
,)()()()()()(1
)()()()()()(1
2122
2122
1
1
t
tttxttxt
tuttxttxt
ooooo
oooooo

Prof.Daniela Iacoviello- Optimal Control
)()(
)()(
1
11
2 tt
tt
oo
oo
1)(:,)()()()(22
ttttut ooo
)(sin
)()()(2
i
ooo
ttKsign
tsignbtsigntu
)(sin)()()( 22 2 iooo ttKttt
All the switching subintervals have length equal to
With the exception of the first and the last
whose length is less or equal than

Prof.Daniela Iacoviello- Optimal Control
All the switching subintervals have length equal to
With the exception of the first and the last
whose length is less or equal than
Figura 1 (Bruni et al.1993)

Prof.Daniela Iacoviello- Optimal Control
Let’s assume
And integrate the system:
1)( tu
0)()()(
)()(
12
21
tutxtx
txtx
1)(sin)(cos
1)( 211
i
ii
i ttxttxtx
)(cos)(sin1
)( 212 ii
ii ttxttxtx
22
2
12
2
1
1)(
1)(
2
ii xxtxtx

Figura 2. (Bruni et al.1993)
22
2
12
2
1
1)(
1)(
2
ii xxtxtx
The trajectories with control are circumferences with center
passing through the initial condition
The direction is clockwise.
1)( tu
0,
1
ix

Prof.Daniela Iacoviello- Optimal Control
Only one trajectory of this family passes through the origin
1)(
1)( 2
2
1 2
txtx
Figura 3. (Bruni et al.1993)

Prof.Daniela Iacoviello- Optimal Control
For a generic instant t:
1
)(
)()(
1
1 2
tx
txtgt
2
1
1212
2
1
21
)(
)()(1
)()(
1)(
)(1
1)(
2
tx
txtxtxtx
tx
txt
)(t
0
)()()(
)()(
12
21
tutxtx
txtx
The trajectories are traversed
with constant angular velocity

Prof.Daniela Iacoviello- Optimal Control
The trajectories are traversed with constant angular velocity
t
1)( tu
The trajectories are traversed with constant angular velocity
We must reach the origin along arcs with amplitude
There exists a unique way to do it!

Prof.Daniela Iacoviello- Optimal Control
Definitions:
,....2,1,0,0,112
: 22
22
2
12
kxx
kxRxk
,...2,1,0,0,112
: 22
22
2
12
kxx
kxRxk
Figura 4. (from Bruni et al. 1993):
Prof.Daniela Iacoviello- Optimal Control
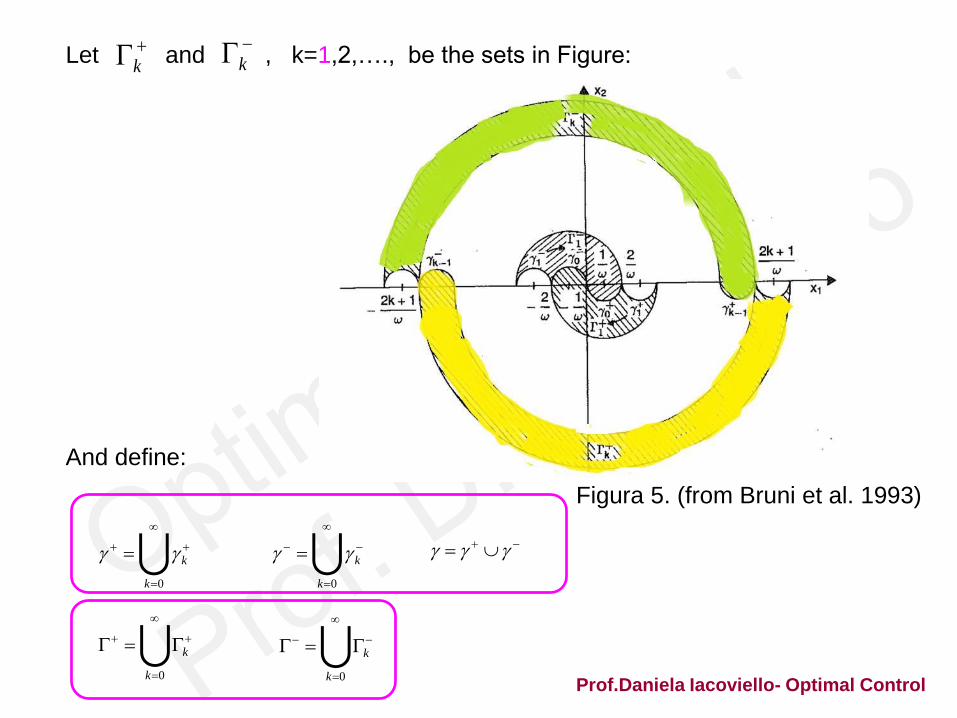
Let and , k=1,2,…., be the sets in Figure:
And define:
k
k
0k
k
0k
k
0k
k
0k
k
Figura 5. (from Bruni et al. 1993)

Prof.Daniela Iacoviello- Optimal Control
The initial states and may be moved to the origin with a
constant control equal to +1 and -1 respectively and the corresponding arc
is less or equal than π.
The points belonging to are the only ones that can be transfered to the
origin with a constant control, without switching
0ix 0ix
00
1a 1b

Prof.Daniela Iacoviello- Optimal Control
Let’s consider initial states
They may be moved to the origin with the following path:
- First a constant control +1 up to the arc for an interval time
- Switching to control -1 to reach the origin.
1 switching instant
001 \ ix
0
Let’s consider initial states
They may be moved to the origin with the following path:
- First a constant control -1 up to the arc for an interval time
- Switching to control +1 to reach the origin.
1 switching instant
0
001 \ ix
2a
2b

Let’s consider initial states
They may be moved to the origin with the following path:
- First a constant control +1 up to the arc for an interval time
- Note that: apply strategy 2b
- Switch to control -1 to reach and then switch to control +1 to reach the
origin two switching instants
12 \ ix
1
Let’s consider initial states
They may be moved to the origin with the following path:
- First a constant control -1 up to the arc for an interval time
- Note that apply strategy 2a
- Switch to control +1 to reach and then switch to control -1 to reach the
origin: two switching instants
1
12 \ ix
11
0
3a
3b
11
0

Figura 6. (from Bruni et al. 1993)

Figura 7. (from Bruni et al. 1993)

Figura 8. (from Bruni et al. 1993)

Figura 9. (from Bruni et al. 1993)

The same happens for any intial condition:
1\ kkix
1\ kkix
\ixAt the generic state you must associate u=+1
At the generic state you must associate u=-1 \ix
\)(1
\)(1)(
tx
txtxu
o
ooo
The number of switching points is given by the minimum index k among the ones
Characterizing the sets and
Example: Consider the point
Then there is only one switching instant.
kk
321P

Time necessary to get to the origin:
If is the number of switching instants:
foii
of tt 1
If
where:
if
if
i
i
ix
xtg
1
21
1
o
Rotation of the optimal trajectory
to go from the initial point to the
first point of commutation
Rotation of the optimal trajectory
to go from the final point to the
origin
0o
ii
of tt
i
i
ix
xtg
1
21
1
oix
oix





























