Embed Size (px)
Citation preview

1700 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 7, NO. 12, DECEMBER 1998
Line and Boundary Detection in Speckle ImagesRichard N. Czerwinski,Member, IEEE,Douglas L. Jones,Member, IEEE,and William D. O’Brien, Jr.,Fellow, IEEE
Abstract—This paper considers the problem of detecting linesin speckle imagery, such as that produced by synthetic aper-ture radar (SAR) or ultrasound techniques. Using the physicalprinciples that account for the speckle phenomenon, we derivethe optimal detector for lines in fully developed speckle, andwe compare the optimal detector to several suboptimal detectionrules that are more computationally efficient. We show that whenthe noise is uncorrelated, a very simple suboptimal detection ruleis nearly optimal, and that even in colored speckle, a related classof detectors can approach optimal performance. Finally, we alsodiscuss the application of this technique to medical ultrasonicimages, where the detection of tissue boundaries is considered asa problem of line detection.
Index Terms—Optimal detection, ultrasound.
I. INTRODUCTION
T HE PROBLEM of detecting linear features in an imageis of interest because these features may contain im-
portant information. For example, in synthetic aperture radar(SAR) scenery, it may be knowna priori that roads travelalong straight lines. In seismic exploration [1], geologicalformations dominated by specific rock types (i.e., sandstone,shale, crystalline rock, etc.) are often found in layers separatedby boundaries that appear as linear features in the imagescollected. Similarly, medical ultrasound systems display tis-sue boundaries as broad curves that appear as straight linesegments if observed at a sufficiently small scale [2]. Thedetection of these features may be an essential first stepin segmenting an image for reconnaissance or diagnosticpurposes.
Feature detection in acoustical or SAR imagery is a chal-lenging problem because of the presence of speckle noise. Thephysical mechanism of laser speckle, common to all formsof coherent imaging speckle, was surveyed by Goodman [3].The statistical treatment in [3] was adapted by Burckhardt[4] and Wagneret al. [5] to better describe the statistics ofultrasound speckle. Later, Wagneret al. [6] introduced theconcept of correlation length to describe the distance overwhich image pixels show statistical correlation, in terms of
Manuscript received October 15, 1995; revised April 15, 1997. This workwas performed at the Department of Electrical and Computer Engineering,University of Illinois at Urbana-Champaign, and supported in part by theNational Live Stock and Meat Board, U.S. Department of Agriculture, and byPHS Grant 5 T32 CA 09067, awarded by the National Cancer Institute, U.S.Department of Health and Human Services. The associate editor coordinatingthe review of this manuscript and approving it for publication was Dr. CharlesV. Jakowatz, Jr.
R. N. Czerwinski is with Lincoln Laboratory, Massachusetts Institute ofTechnology, Lexington, MA 02420 USA.
D. L. Jones and W. D. O’Brien, Jr., are with the Department of Electricaland Computer Engineering, University of Illinois at Urbana-Champaign,Urbana, IL 61801 USA (e-mail: [email protected]).
Publisher Item Identifier S 1057-7149(98)08724-7.
imaging parameters such as frequency of interrogation andtransducer array size.
Even though speckle can be treated statistically, and is oftensaid to “corrupt” an image, it is important to note that speckleis not noise in the sense in which engineers often use the term.In SAR imaging, for instance, Munson and Sanz [7] showedthat speckle isnecessaryto be able to form an image at all.In medical ultrasonics, it is widely believed that the speckle“texture” conveys information about the region being imaged,although the exact method of interpreting that information isin dispute [8], [9].
A few authors have proposed processing schemes moti-vated by statistical considerations, notably Kuanet al. [10],who derive adaptive techniques for the restoration of speckleimagery, and Donohue [11], who computes the maximumlikelihood estimator for coherently reflecting targets from A-mode ultrasound backscatter, enabling statistical detection oftargets in raw RF data.
Other processing schemes make simplified assumptions onthe speckle statistics to develop useful processing techniques.A survey of some of these techniques is given in [12]. Bovikand Munson [13], Bovik [14], and Donohue [15] assumed amultiplicative model for speckle to produce useful techniquesfor edge detection, in spite of flaws in the multiplicative noisemodel [16]. The result in [14] is arguably the state of the artin detecting step discontinuities in speckle imagery; however,none of these techniques consider second or higher orderspeckle statistics in the development of processing techniques.
This paper represents a comprehensive study of detectionmethods in speckle noise. In particular, we discuss the optimaland near optimal detection of lines. We also describe a sub-optimal approach, similar in principle to the Hough transform[17], which works well when the speckle field is uncorrelated,and which offers reasonable performance at low computationalcomplexity in colored noise. We also find that theoretically, theperformance of this technique can be significantly improvedby “prewhitening” the speckle field.
A related technique has been in use in pattern recognition byLee and Rhodes [18]–[21] and by Hou and Bamberger [22],[23]. Our own work is the first use of this idea in medicalimaging [2], [24], and includes a strong argument for the nearoptimality of this approach, at least in the case of ultrasoundspeckle, which is lacking in [18]–[23].
II. STATISTICS OF IMAGING SPECKLE
In order to evaluate the relative performance of differentdetection rules, we will generate a simulated speckle environ-ment. The following section describes a realistic but idealizedmodel for speckle, which provides a noise environment for
1057–7149/98$10.00 1998 IEEE

CZERWINSKI et al.: LINE AND BOUNDARY DETECTION 1701
the simulations about as challenging as true speckle, but withexactly known statistics that can be provided to the detectors.Actual imaging speckle is only approximately described bythis model, as we will invoke certain assumptions that maynot be valid under all circumstances. The actual distributionof speckle under various conditions, such as a small numberof scatterers per resolution cell, or a nonrandom spatial dis-tribution of scatterers, is the subject of much current research[9]. This paper will not consider the sensitivity of the optimaldetector to noise modeling errors.
A. Fully Developed Speckle
Imaging speckle is a phenomenon that occurs when acoherent source and noncoherent detector are used to inter-rogate a medium which is rough on the scale of the wave-length. Speckle accounts for the grainy appearance of imagesproduced with synthetic aperture radar, medical ultrasound,or laser holography systems. A so-called “fully developed”speckle pattern is formed when each resolution cell containsmany point scatterers, none of which produces a significant re-flection by itself. The received signal is thus the superpositionof many small reflections, whose phases relative to the sourceare approximately uniformly distributed over the ensemble ofreflections. The uniform distribution of phases results from theassumptions that there are many scatterers per resolution cell,and that the scatterers in each cell are independent of eachother and closer together than a spatial pulse length.
The sum of all reflections in each resolution cell can bethought of in terms of a two-dimensional (2-D) random walk[3], with each scatterer representing a step of a randommagnitude and direction. The resultant of the random walk,the sum of a large number of independent components, isequivalently modeled as a complex Gaussian random variablewith independent and identically distributed real and imaginarycomponents.
Upon detection, the phase information of this complexquantity is lost and an image is formed by displaying themagnitude of the reflected signal in each resolution cell asa pixel intensity. A coherent imaging system may insteadproduce a squared magnitude image (for example, laser orradar based imaging systems use detectors sensitive to theintensity of incident energy). Since the magnitude and squaredmagnitude images can be obtained from each other, we willassume without loss of generality that the image is formedby taking the squared magnitude of the underlying complexGaussian field.
Statistical correlation between adjacent pixels is a result ofdiffraction effects in the transverse direction, and intersymbol-interference-like effects in the range direction. A fully de-veloped speckle pattern is thus the magnitude of a complexGaussian field with correlation structure dependent on thepulse shape, the imaging optics, and the distances involved.Notably, it is independent of the medium being imaged.
B. Statistics of Specular Reflections
When a resolution cell contains a target that produces astrong reflection, a different statistical model must be used. If
the resolution cell also contains a large number of weak pointreflectors, the received signal for that cell can be modeled by a2-D random walk as described above, but with a nonzero bias.That is, the specular reflector produces an offset with a randomphase, to which an unbiased random walk adds complexGaussian variation. The phases of the specular componentsare themselves random variables, which we assume to beuncorrelated from point to point, and uniformly distributedon
The assumption of uncorrelatedness is based on the fact that,in general, there is uncertainty in the position of the sourceand receiver on the order of a wavelength. In some imagingmodalities, this may not be a valid assumption. For instance, inultrasound B-mode scanning, the phases of specular reflectionsmay be uncorrelated in the transverse direction, but correlatedin the axial direction. However, since ultrasound is incapableof imaging linear structures oriented parallel to the beam,we ignore the phase correlation in the axial direction andassume the phase is uncorrelated everywhere in the image. Ingeneral, even exact knowledge of the phase does not increasethe detector performance significantly, so the assumption ofuncorrelated phase is not overly restrictive.
C. Moments of the Speckle Field
A speckle field, like any other random process, can bedescribed by its statistical moments. The moments of a specklefield can be obtained in terms of the moments of the underlyingGaussian distribution function by using the moment generatingfunction for the complex Gaussian density function [25].
Let represent points from a speckle pattern, meaning theyare related to correlated complex Gaussian random variables
by The vector
...
...
(1)
has density function
(2)
where is the mean ofis the mean of and is the dimension of The thmoment can be calculated using

1702 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 7, NO. 12, DECEMBER 1998
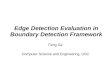
Fig. 1. Orientations of a length 5 stick. Each of these orientations represents a hypothesis to evaluate at each pixel.
the moment generating function
(3)
where
(4)
III. D ETECTION IN SPECKLE
The problem of detecting lines in images is related to asimpler problem, that of determining whether or not a linepasses through each pixel. We consider a neighborhood aroundeach pixel and search for lines passing through the centerof that neighborhood. This is an -ary hypothesis testingproblem, where each of the hypotheses represents a possibleline orientation. More general -ary detection problems canbe considered by substituting a different set of hypotheses forthe straight line segments considered here.
For simplicity, we take the neighborhood to be ansquare region, and the number of possible orientations, equalto the number of hypotheses, to scale linearly with Werefer to the set of lines as “sticks” because although theyare long compared with the correlation length of the specklefield, they are short on the scale of the features of interest;in a sense, large-scale linear features are “built up” of sticksat different locations and orientations. Fig. 1 shows a set ofsticks of length 5.
In the sections that follow, several different detection strate-gies are discussed. In each case, except for the rotating kerneltransformations, the desired test is performed by comparingthe maximum test statistic value at each point to a threshold.For the rotating kernel transformations, the test is implementedby subtracting the minimum test statistic from the maximumtest statistic and comparing the result to a threshold.
A. Optimal Detection
Optimal -ary hypothesis testing is accomplished by se-lecting the hypothesis which maximizes the likelihood ratiofunction [26]
(5)
where the signal vector is a set of image points in aneighborhood, and theth hypothesis represents thethorientation straight line passing through the center of theneighborhood.
The likelihood ratio function is the ratio of the probabilitydensity of a particular realization under hypothesisto its probability density under the null hypothesis Inthe stick detection problem, we wish to distinguish betweenthe null hypothesis and hypotheses through eachof which corresponds to the presence of a straight line. Thedifferent hypotheses are characterized statistically by
(6)
(7)
where is a zero mean complex Gaussian randomvector whose real and imaginary parts are Gaussian, indepen-dent, and identically distributed, is the binary valued maskcorresponding to a stick at theth orientation. This correspondsto the case of specular reflection of sound from a boundary.
Note that we have “unrolled” the square image re-gions into vectors for ease of manipulation. This is donewithout loss of generality, since all the spatial correlations ofthe 2-D discrete Gaussian random field can be expressed in acorrelation matrix. Note also that we will be performing thehypothesis test on thesquaredmagnitude of the image ratherthan the magnitude. This invertible transformation is done tosimplify computation.
The probability density function of the signal vectorunderhypothesis can be computed from the underlying normal

CZERWINSKI et al.: LINE AND BOUNDARY DETECTION 1703
distribution on the constituents of:
(8)
(9)
expressed in terms of an integral overa nuisance parameterwith known Gaussian distribution. Note that in (8), we haveassumed that the reflection is coherent in phase with the in-phase noise component. Since the noise has a circular Gaussiandistribution in the complex plane, the projection of the noiseonto any two perpendicular axes forms a set of independent,identically distributed Gaussian random variables; thus (8) canbe written without loss of generality.
The density function under the null hypothesis is obtainedfrom (9) by setting to the zero vector:
(10)
The likelihood ratio function for each hypothesis is thus theratio of two -dimensional integrals, where is the lengthof the stick. The most probable hypothesis for any given imageregion is the hypothesis which maximizes the likelihood ratiofunction. If all the likelihood ratio functions are less than somethreshold, then the null hypothesis should be selected. Thusthe optimal stick detection scheme is to evaluate a familyof integrals for each point, compute the maximum result andcompare to a threshold.
The true likelihood ratio function requires tremendous cal-culation (on the order of multiplications by Gaussianquadrature integration, where is the stick length) to evaluatebecause of all the interpixel correlations that make (9) and (10)iterated integrals rather than products of one-dimensional inte-grals. However, if the speckle is known to have uncorrelated
pixels, optimal detection can be performed at more modestcost.
A speckle field tends to decorrelate spatially rather quickly,so one way of dealing with speckle is to decimate the image tothe point where the interpixel correlations are insignificant. Inthis case, the speckle field can be modeled as the squaredmagnitude of a white Gaussian field. Thus, the pixels areindependent, and the problem reduces to a multidimensionalRayleigh/Rician detection problem, well-known in noncoher-ent communications [27]. Note that it is themagnitude(notsquared magnitude) of a Gaussian random variable that hasa Rayleigh or Rician distribution. Thus, the likelihood ratiobelow is expressed in terms of where is the square ofthe image pixels, consistent with the definition above.
For white speckle noise [27], the likelihood function is givenby
(11)
where is a modified Bessel function, andis the th component of the stick at theth orientation.
Collecting terms, we obtain
(12)
where is a constant with respect to which can beincorporated into the threshold.
B. Quadratic Detection
The optimal detector in the colored noise case is prohibi-tively expensive to implement. Even in the case of uncorrelatedspeckle, optimal detection requires the evaluation of a set ofBessel functions for each image point. Thus, a suboptimaldetection rule may be desirable for detection in colored noiseif it offers reasonable performance at significant computationalsavings.
We now center our attention on the class of linear-quadraticdetectors, since they are much simpler computationally thanthe optimal colored-noise detectors, require no special functionevaluations, and can offer high performance. One well-knowntechnique for designing linear-quadratic detectors is to use thedeflection criterion. Historically, deflection was first used todesign optimal linear-quadratic systems for detecting Gauss-ian signals in Gaussian noise [28]. However, the approachof Picinbono and Duvaut [29] allows the technique to begeneralized to the case of arbitrarily distributed noise, providedcertain noise statistics are known.
A linear-quadratic test statistic has the form
(13)
where and the trace term is included to ensurethat under the null hypothesis. The subscriptisused to denote a particular hypothesis. The deflection-optimal

1704 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 7, NO. 12, DECEMBER 1998
linear-quadratic detection rule has the form of (13), and usesvalues of and , which maximize deflection
(14)
For Gaussian signals in Gaussian noise, is a signal-to-noise ratio (SNR); in general detection problems, it isglobally maximized by the likelihood ratio [29]. In the caseof speckle, a linear-quadratic test can not be globally optimal.It may, however, offer a computationally tractable suboptimalsolution.
Picinbono and Duvaut [29] showed that the deflectionoptimal and can be obtained by solving the followinglinear equations simultaneously:
(15)
(16)
where
(17)
(18)
(19)
(20)
(21)
(22)
These statistics can be calculated using the moment gener-ating function (3). Note that since speckle patterns are strictlypositive, the mean under the null hypothesis
(23)
must be subtracted from the observation so that (17) holds. Wedefine and derive the moments abovefor instead of
Without lengthy derivation, we calculate
(24)
(25)
(26)
(27)
(28)
(29)
where is the th element of the orientation stick, andis the “correlation coefficient” between two points in the
complex speckle pattern, taking on values between1 and 1:
(30)
Since the detector coefficients and derived fromthe statistics computed in (24)–(29) are in terms of
instead of the deflection-optimal detectorhas the form
...
......
. . ....
(31)
C. Generalized Likelihood Ratio Detection
In many cases where a likelihood ratio test is intractable,a computationally simplergeneralized likelihood ratio test(GLRT) can be used instead. The GLRT is the ratio ofthe active to null hypothesis conditional pdf’s, conditionedon maximum likelihood estimates of which active and nullhypotheses are present [30]. Mathematically, the GLRT iswritten
(32)
where and are conditional active and nullhypothesis probability density functions (pdf’s). A significantadvantage of the GLRT is its ability to deal with unknownparameters.
In this subsection, we compute the GLRT for a stick ofunknown amplitude in additive colored Gaussian speckle. Likethe deflection criterion, this method may provide a usefultechnique in spite of unrealistic assumptions on the noisestatistics. The signal model is the following:
(33)
(34)
where is a colored Gaussian random vector,is the unit-magnitude stick of orientation and is a positive quantitydenoting the unknown magnitude of the stick.
The GLRT is obtained by thresholding the following quan-tity:
(35)

CZERWINSKI et al.: LINE AND BOUNDARY DETECTION 1705
Since is a discrete valued parameter (the index into afamily of sticks), we maximize first with respect to; themaximum occurs when
(36)
Because the exponential is a monotonically increasing func-tion, we can implement an equivalent GLRT by thresholdingonly its argument; thus, the GLRT is
(37)
Note that we have assumed that however, it is possiblefor negative values to occur. Since is a positive semidef-inite correlation matrix, implies thatWe will treat this as an error condition implying that no signalis present at that orientation.
With this assumption, the GLRT can be implemented as
(38)
where
(39)
If the noise is circularly distributed, is constant withrespect to and can be neglected, leading to a particularlysimple linear test.
D. Linear Detection
1) Sticks: If the noise is assumed to be white, (38) reducesto a simple linear projection operation. At each point, thedetection statistic is produced by adding all the pixel intensitiesfalling along a stick of one orientation and maximizing the sumover all possible stick rotations:
(40)
Although speckle is neither additive, Gaussian nor white, wehave found the “sticks” technique to be useful for detection oflinear components as well as for image enhancement [2], [24].
2) Prewhitened Matched Filtering:Although the stickstechnique has yielded useful results, it is based on questionableassumptions, particularly that the speckle is Gaussian anduncorrelated. A more sophisticated linear detection rule canbe constructed by “prewhitening” the image to remove theinterpixel correlations, and then applying a matched filter.The prewhitening filter is implemented by retaining theterm in (38) but assuming from (39) is constant withrespect to :
(41)
where
(42)
This can be evaluated elementwise by application of thestatistics calculated in (24)–(29):
(43)
Note that the correlation expression in (43) is independent ofthe presence or absence of a line. The prewhitening operationassumes the noise has Gaussian distribution with mean andcovariance calculated by the moment generating function,applies a whitening filter to the observation, then applies amatched filter. The technique is still suboptimal since speckledoes not have a Gaussian distribution.
E. Rotating Kernel Transformations
The use of rotating kernel transformations, introduced byLee and Rhodes [18]–[21] for pattern recognition and en-hancement of linear features, represents a generalization of thesticks technique. The transformations involve the convolutionof the original image with a long narrow operator at variousorientations. The convolutions produce a set of output valuesfor each pixel; the enhanced image is computed pointwiseas a function of the output values at each point. Until thepresent work, the use of these techniques has been statisticallyuncharacterized. The rotating kernel transformations describedbelow all have the form
(44)
where the choice of and distinguishes thetransformations. Table I summarizes a few of these algorithms.
Lee and Rhodes [18]–[21] proposed a “rotating kernel min-max transformation” (RKMT) similar to sticks, except thatthe detection statistic is the arithmetic difference between thelargest and smallest stick projections, instead of the maximum.This technique may offer better performance when the originalimage has varying degrees of brightness at different pointsof the image, or a varying SNR. A tapering function can beused with the RKMT by applying a taper to the stick insteadof using a rectangular contour. Rectangular, Gaussian andtriangular tapering functions are compared in Section IV-C.
F. Other Operators
The number of potential line detection operators is virtuallyunlimited. For example, we have experimented with the useof a median operation in place of the line sum used by sticks[31], and with estimating the prior probabilities of each lineorientation to help in detection [32], [33]. At this time, wewill defer analysis of these techniques, and simply commentthat they illustrate the variety of related techniques that canbe developed. A comparison of techniques showing theirperformance in processing real images will be presented in[33].
IV. COMPARISON OF RESULTS
This section presents a comparison of the techniques de-scribed above by way of Monte Carlo simulation. In eachcase, the detector performance is summarized in a receiveroperating characteristic (ROC) curve, in which the probabilityof correctly detecting a line segment is plotted versus theprobability of falsely detecting a segment when none is present
The threshold is a parameter which increases along the

1706 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 7, NO. 12, DECEMBER 1998
ROC curve with increasing values of More powerfuldetectors have higher ROC curves (i.e., for a given falsealarm probability, they yield a higher probability of correctdetection). For cases where the ROC curves for two detectorscross, detector performance can be quantified in afigure ofmerit (FoM) equal to the area under the curve.
To obtain a ROC for a given detector, an experiment was run1000 times in which a speckle pattern was simulated accordingto the model in (6) and (7). For each experiment, a set ofsimulations was performed where a line segment of everypossible orientation (in the sense of Fig. 1) was immersed inthe noise realization. Each resulting signal-in-noise realizationwas compared to a noise-only case consisting of simulatedspeckle with no line segment present. The detector in questionwas applied to the set of noise-only and signal-in-noise realiza-tions, and the numerical detector output from each case wasrecorded. The simulations used a random number generatorfrom Numerical Recipes[34] and linear algebra subroutinesfrom LAPACK [35] and Matlab [36].
For each detector, the result of the simulation was twosets of detector outputs, one for each lineorientation in each separate experiment, and foreach experiment obtained by applying the detector to thenoise-only speckle realization. This procedure is equivalent togenerating 1000 detection statistics for each active hypothesis,and for the null hypothesis. For any fixed threshold,the expected number of correctly detected signals in the
active hypothesis realizations iswhere is the probability of correct detection. Similarly, theexpected number of false alarms in the nullhypothesis realizations is whereis the probability of false alarm. Thus, and can beestimated by
(45)
and
(46)
where and are respectively the number of active andnull hypothesis test statistics exceeding the threshold.
The variance of these estimates, andare upper bounded by since
and lie between zero and one. The probabilitiesandare actually functions of the threshold applied; the locus of
obtained by varying the threshold is the ROC curve.The area under the curve, used as a figure of merit, also hasvariance upper bounded by 2.510 ; this is actually a looseupper bound, however, as it assumes no correlation between
and at different thresholds.Note that the ROC curves given here represent average
detector performance over all possible stick orientations. Notealso that we have not considered the problem of correctlyclassifying target orientation; if a statistic mismatched inorientation to the target returns the maximum value, it issimply accepted as a correct detection. The different detectors
(a)
(b)
Fig. 2. (a) ROC curves comparing detectors in white noise at low SNR (�3dB) and (b) sample image prepared with the signal and noise settings used incalculating the ROC’s. The signal is a diagonal line barely visible through thenoise; this is an unrealistically low SNR simulation of ultrasound imaging.The simulation parameters used here are: stick length= 5, kernel size=1 (white noise), signal amplitude= 1.0. The poor performance of even theoptimal detector is due to the very poor image quality.
do not appear to differ in their classification ability; however,no complete study of this topic has been undertaken.
The severity of the noise and power of the detectorsevaluated was controlled by setting several parameters. First,the “stick length,” or linear size of the operator, affects theperformance of the detector in a direct way. A long stick willsmooth speckle better than a short stick, but possibly at theexpense of also smoothing out edge features. In practice, weexpect that the edges are only locally approximated by thelinear model; i.e., we assume some curvature to the edges.Therefore in actual image processing, this parameter shouldbe set longer than the correlation length of the speckle, but nolonger than the length over which the edges are expected tobe roughly straight [2]. In the simulations here, the signal isalways matched perfectly in length by the detection template.Thus, if all noise parameters are set equivalently, a longer

CZERWINSKI et al.: LINE AND BOUNDARY DETECTION 1707
(a)
(b)
Fig. 3. (a) ROC curves comparing detectors in white noise at a higher SNR(3 dB), and (b) sample image prepared with signal and noise settings usedin calculating ROC’s. The simulation parameters used here are: stick length= 5, kernel size= 1 (white noise), signal amplitude= 2:0: This noise levelis much more representative of ultrasound image quality than that portrayed inFig. 2. The diagonal line is visible, though still significantly noise corrupted.Uncorrelatedness of the noise could be achieved in practice by decimatingthe image to the theoretical resolution limit of the device used in producingthe image.
stick will outperform a shorter stick, since it averages overmore data.
In the simulations presented here, the correlation lengthof the speckle was controlled by changing the size of thesmoothing kernel used to introduce correlation to the underly-ing Gaussian noise; a size of one implies white noise withvariance one. The smoothing kernel is Gaussian in shape,and is truncated at some point. To keep the simulations tomanageable length, the kernel size could not be made bigenough to allow the noise correlation to taper gradually to zero.However, since the goal of the simulations was to comparedetector performance in arbitrarily correlated noise, the short-term correlation is sufficient to model reality.
A. Comparison of Detectors in White Speckle Noise
Fig. 2(a) shows ROC curves for the sticks detector, thedeflection-optimal detector, and the optimal white noise de-
(a)
(b)
Fig. 4. (a) ROC curves comparing detectors in colored noise at low SNR(�2.4 dB), and (b) Sample image prepared with signal and noise settingsused in calculating ROC’s. The simulation parameters used here are: sticklength= 7, kernel size= 3, signal amplitude= 3.0 . As in Figs. 2 and 3, thesignal present is a diagonal line from upper left to lower right. As in Fig. 2,this represents an unrealistic simulation of ultrasound speckle. It does serveto illustrate the benefits of prewhitening, however, as Fig. 4 shows a clearimprovement of the prewhitening and deflection detectors over simple sticks.
tector for a low-signal-amplitude scenario. The noise level isvery severe, and no detector does a very acceptable job fornoise this strong. A sample noise realization at this noise levelis given in Fig. 2(b), which shows a diagonal line which isalmost totally obscured by the noise.
Fig. 3(a) shows ROC’s for the sticks detector, the deflec-tion-optimal detector, and the optimal white noise detectorfor a higher-signal-amplitude white noise simulation. In thesample noise realization in Fig. 3(b), the diagonal line is moreprominent than in Fig. 2(b). As in the low-signal-amplitudecase, the three detectors offer very similar performance; sincethe Sticks detector is much more computationally simple thanthe deflection and optimal detection rules, we conclude thatthe simple linear matched filter (sticks) is sufficient to obtainnear optimal performance in the case of white speckle.

1708 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 7, NO. 12, DECEMBER 1998
(a)
(b)
Fig. 5. (a) ROC curves comparing detectors in colored noise at medium SNR(2.0 dB) and (b) sample image prepared with signal and noise settings used incalculating ROC’s. The simulation parameters used here are: stick length= 7,kernel size= 3, signal amplitude= 5:0. The signal present is again a diagonalline from upper left to lower right. This noise level is more representative ofultrasound image quality than that in Fig. 4(b), but still represents a ratherlow SNR. In this case, the deflection and prewhitened sticks detectors doapproximately optimally, and simple sticks somewhat worse. We concludethat in the medium SNR case, the noise coloring is much more important asa corrupting influence than non-Gaussianity.
B. Comparison of Detectors in Colored Speckle Noise
Figs. 4(a), 5(a), and 6(a) show ROC’s comparing the per-formance of sticks with that of the deflection-optimal detectorand the prewhitened sticks detector in the low, medium-, andhigh-signal-amplitude colored noise cases. Noise realizationsat these noise levels are presented in Figs. 4(b), 5(b), and 6(b).The stick length has been changed from the setting used in thewhite noise case to ensure that it is longer than the correlationlength induced by the coloring kernel.
For the low-signal-amplitude case, we see a clear increase inperformance as we move from the simple linear sticks detectorto the more sophisticated linear prewhitened sticks detector tothe quadratic deflection-optimal detector. This is reasonable,since in general, the optimal quadratic detector must be noworse than the optimal linear detector and may in fact be morepowerful. What is surprising is that, especially in the medium
(a)
(b)
Fig. 6. (a) ROC curves comparing detectors in colored noise at high SNR(6.1 dB) and (b) sample image prepared with signal and noise settings used incalculating ROC’s. The simulation parameters used here are: stick length= 7,kernel size= 3, signal amplitude= 8:0. The signal present is again a diagonalline from upper left to lower right. This noise level is more representative ofultrasound image quality than the noise in Figs. 4 and 5. As in Fig. 5, thedeflection and prewhitened sticks detectors perform nearly optimally.
and high SNR cases, the deflection-optimal and prewhitenedsticks detectors perform almost equally well. This indicatesthat the optimal linear-quadratic detector is dominated by itslinear component, which is approximately the same as theprewhitened sticks detector.
This result, along with the near optimality of sticks detectionof lines in white speckle noise, implies that thecoloringof speckle affects the performance of a detection rule morethan the non-Gaussianity of the noise. It also suggests thatprewhitened sticks may approach optimality in the coloredspeckle case as nearly as does sticks detection of lines in thewhite noise case.
It must be noted that the success of any statistically mo-tivated detection rule is highly sensitive both to errors inestimating noise statistics and defining the target model. Inmany situations, including ultrasound image processing, itmay not be possible to reliably estimate the noise statistics

CZERWINSKI et al.: LINE AND BOUNDARY DETECTION 1709
TABLE ISUMMARY OF ROTATING KERNEL TRANSFORMATIONS
without averaging over an area of image containing unwantedvariations in image statistics (such as targets and varyingSNR). One possible solution is to use an adaptive whiteningfilter to decorrelate the noise. Since the noise correlationis separable into axial and transverse components, a one-dimensional (1-D) filter can be applied successively in eachdirection, and will be able to operate on the entire image inspite of the changes in noise correlation or SNR that occurfrom region to region.
Finally, a difficulty arises because the stick model for linesegments is itself imprecise. If the actual targets are broaderthan a single pixel, for example, the performance of the detec-tor can be dramatically reduced. The ROC curves presentedhere thus represent performance bounds on detection rules ofa fixed order, searching a known statistical environment fora precisely defined target. Actual performance under realisticcircumstances will be somewhat degraded.
C. Comparison of Rotating Kernel Techniques
The RKMT transforms proposed by Lee and Rhodes[18]–[21] and summarized in Table I are compared withthe sticks detector in Fig. 7. The RKMT detectors differfrom sticks in that instead of simply using the maximumstick projection at each point as the test statistic, the RKMTdetectors use the difference between the maximum and
Fig. 7. ROC curves comparing sticks with RKMT detectors in 2 dB coloredspeckle noise. RKMT detection is suboptimal in constant SNR case, but maybe useful for detection when the SNR or general brightness level varies withinan image.
minimum stick projections. While the RKMT detectors aresuboptimal for the general detection problem, they mayfind application in imaging scenarios where the signal level

1710 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 7, NO. 12, DECEMBER 1998
TABLE IIFIGURES OF MERIT FOR DETECTORS SURVEYED
varies from point to point in the image, or the targets arecurving lines. While these scenarios are difficult to simulateadequately, they may nevertheless arise in real imagingproblems.
D. Comparison of Techniques by Figures of Merit
The comparison of detection rules in this section is summa-rized in Table II, in which figures of merit are tabulated foreach detector in each experiment by calculating the area underthe corresponding ROC curve. In the white noise case whenan optimal detector is available, it always offers the highestFoM. Otherwise, the deflection detector generally features thehighest FoM, followed by the prewhitened sticks detector (inthe colored noise case), the Sticks detector, and finally thesuboptimal RKMT detectors. In a few cases, the deflectiondetector has a lower FoM than another detector. This is likelydue to the fact that the deflection operators are selected tomaximize the deflection criterion, not this particular figure ofmerit, which is a more appropriate measure of detector powerin non-Gaussian noise. These findings are in agreement withstandard results from detection theory [30].
In the colored noise cases, the deflection and prewhitenedsticks detectors yield the best performance of any techniquesurveyed here. The deflection detector is quadratic in theobservation, and requires higher complexity than the lineartechniques to compute the test statistic at each point. Fur-thermore, the coefficients used in the deflection detector areobtained by solving a large set of equations; solving forthe coefficients is straightforward, but computation-intensive.The other detectors surveyed do not require such elaboratecomputation to determine the detection rule.
By comparison, the new prewhitened sticks detection ruleis a linear function of the observation, requires low computa-tional complexity multiplies per pixel, where is thestick length), and offers excellent performance. When second-order statistics for the speckle field can be exactly estimated,the prewhitened sticks detector is the technique of choice.Finally, we note that when SNR is high, the added expenseof estimating statistics for the prewhitened sticks or deflectiondetectors may not be worthwhile, since sticks itself comparesfavorably, especially in the white noise case.
E. Enhancement of Real Images
The sticks technique has been very successful in our work inenhancing images for boundary detection. While it is impossi-ble to define the “right” answer as precisely as in simulations,an image formed by plotting the sticks detection statisticat each point is much smoother and visually more easilyinterpretable. Fig. 8(a) shows a 512 442 pixel image ofa pig muscle collected with a commercial medical ultrasoundscanning system. Fig. 8(b) shows a sticks-processed image,using an operator of length 15 pixels. This operator sizewas determined by subjectively estimating the length overwhich the boundaries appear to be composed of straight linesegments. In practice, the stick length can often be set usingprior knowledge of the specific problem being addressed. Acomparison of the results with different stick lengths will bepresented in [33].
Note the thin boundary between two layers of subcutaneousfat which is emphasized even though it is only a few pixelswide. An equivalent size (for example 4 4 pixel) medianor linear lowpass filter would be incapable of enhancing long

CZERWINSKI et al.: LINE AND BOUNDARY DETECTION 1711
(a)
(b)
Fig. 8. A 512� 442 pixel image of a pig muscle (a) before and (b) after processing with length 15 stick operators. The resulting image is further by raisingeach pixel to the power 1.5, then renormalizing to 255 gray levels. The processed image is clearly enhanced, showing even thin lines without smearing,and rejecting background speckle, which typically appears as spots rather than lines.

1712 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 7, NO. 12, DECEMBER 1998
straight components as well as the present technique, whilefiltering with a larger operator, such as a 15 15 filter,would obliterate features such as dark gaps between lines [37].Adaptive or sticklike median filters [37], [38] are an alternativeto stick-projection processing. Finally, the text displayed atthe bottom of Fig. 8(a) is also processed and displayed inFig. 8(b). The tendency of the sticks to resolve image featuresinto lines is evident in the processed text, where connectionsare made between letters, and between unconnected parts ofletters. In medical imaging, tightly curving features such aslettering are uncommon. In more general image processingapplications, such as SAR, intersections of lines at acuteangles might be more common, and thus the Sticks techniquemust be used with care, especially in the vicinity of lineintersections where the templates model the image featuresvery poorly.
F. Threshold Selection for Line Detection
Great care must be used in applying a threshold in real dataanalysis, as a fixed threshold may not be appropriate at everypoint of the image. Sticks-processed images were successfullyused to estimate fat and muscle thicknesses in ultrasound scansof beef carcasses in connection with the Beef UltrasoundGrading Project at the Bioacoustics Research Laboratory atthe University of Illinois [39]. The data varied significantlyin quality during this project, and so tissue boundaries wereidentified by extracting a cross-sectional trace, and selectingwith the highest point that 1) exceeded a low threshold, 2) wasa local maximum, and 3) fell between a region known withhigh probability to contain the desired feature.
More analytically, it is possible to use a threshold thatachieves a constant false alarm rate (CFAR). A threshold isselected which produces a certain acceptable number of falsealarms in a region known not to contain a boundary. Thisthreshold is then used throughout the image. The performanceof this thresholding technique can be analyzed as follows.Assume the speckle is Gaussian distributed with first- andsecond-order statistics as described in Section II. Here, wewill consider the image itself, without the mean subtracted asin that earlier discussion, and neglect interpixel correlations
We set a threshold two standard deviations above the mean:
(47)
where is the variance of the underlying complex Gaussianrandom field, is the stick of the selectedorientation and is the amplitude of the stick operator itself.This threshold corresponds to a probability of false alarm of0.004.
The probability of correct detection can be computed withknowledge of the first- and second-order moments under the
active hypothesis
(48)
and
(49)
where the expected magnitude of a target inthe image.
Under this threshold, the probability of correct detectioncan be computed as
(50)
which is independent of the template amplitude; equally pow-erful tests can thus be implemented with unit-amplitude sticks.
V. CONCLUSION
This paper has discussed the theory of line detection for thecase of speckle noise such as that which corrupts acousticaland radar images. It represents a comprehensive survey ofoptimal and suboptimal approaches to detecting lines andboundaries in speckle noise. The optimal detectors are compu-tationally expensive to implement in practice, so suboptimaldetectors of linear and quadratic order are surveyed as well.A statistical analysis is performed to compare the relativeperformances of the optimal and suboptimal detection rules un-der various noise colorings and powers; the resulting receiveroperating characteristic curves are bounds on the performanceof the detectors under ideal circumstances. While the analysisas given here is valid only for the case of detecting linesand piecewise sticklike curves in Rayleigh speckle, it can begeneralized to other multiple or composite hypothesis testingproblems by using a different set of templates in place of thesticks discussed here, and by adapting the noise model to fitthe true statistics.
The performance comparison indicates that a linear scheme(“sticks”), with the form of a matched filter in additive whiteGaussian noise, performs near optimally when the speckle isuncorrelated, for instance if the image has been decimated.In the case of colored speckle, a prewhitening step priorto the matched filter can yield dramatic improvement inperformance if the speckle statistics are exactly known. Inthe absence of such knowledge, however, the sticks detectoris a useful approach that offers reasonable performance in avariety of noise environments. The image formed by plottingthe sticks output shows even very thin details from the originalimage clearly, while still smoothing the speckle. As a result,the machine detectability of image contours is substantiallyimproved.

CZERWINSKI et al.: LINE AND BOUNDARY DETECTION 1713
ACKNOWLEDGMENT
The pig image was collected by I. Hein, N. B. Smith, W.D. O’Brien, Jr., and J. Novakofski.
REFERENCES
[1] L. C. Wood and S. Treitel, “Seismic signal processing,” inImagingTechnology, H. Lee and G. Wade, Eds. New York: IEEE, 1986, pp.409–421.
[2] R. N. Czerwinski, D. L. Jones, and W. D. O’Brien, Jr., “An approachto boundary detection in ultrasound imaging,” inProc. 1993 IEEEUltrasonics Symp., Baltimore, MD, Nov. 1993.
[3] J. W. Goodman, “Statistical properties of laser speckle patterns,” inTopics in Applied Physics, vol. 9: Laser Speckle and Related Phenomena,2nd ed., J. C. Dainty, Ed. Berlin, Germany: Springer-Verlag, 1984, pp.9–74.
[4] C. B. Burckhardt, “Speckle in ultrasound B-mode scans,”IEEE Trans.Sonics Ultrason., vol. SU-25, pp. 1–6, Jan. 1978.
[5] R. F. Wagner, S. W. Smith, J. M. Sandrik, and H. Lopez, “Statisticsof speckle in ultrasound B-scans,”IEEE Trans. Sonics Ultrason., vol.SU-30, pp. 156–163, May 1983.
[6] R. F. Wagner, M. F. Insana, and S. W. Smith, “Fundamental correlationlengths of coherent speckle in medical ultrasonic images,”IEEE Trans.Ultrason., Ferroelect., Freq. Contr., vol. 35, pp. 34–44, Jan. 1988.
[7] D. C. Munson, Jr. and J. L. C. Sanz, “Image reconstruction fromfrequency-offset Fourier data,”Proc. IEEE, vol. 72, pp. 661–669, June1984.
[8] R. C. Molthenet al., “Ultrasound echo evaluation by K-distribution,”in Proc. 1993 IEEE Ultrasonics Symp., Baltimore, MD, Oct. 31–Nov.3, 1993.
[9] P. M. Shankaret al., “Use of non-Rayleigh statistics for the identificationof tumors in ultrasonic B-scans of the breast,”IEEE Trans. Med. Imag.,vol. 12, pp. 687–692, Dec. 1993.
[10] D. T. Kuan, A. A. Sawchuk, T. C. Strand, and P. Chavel, “Adaptiverestoration of images with speckle,”IEEE Trans. Signal Processing, vol.ASSP-35, pp. 373–383, Mar. 1987.
[11] K. D. Donohue, “Maximum likelihood estimation of A-scan amplitudesfor coherent targets in media of unresolvable scatterers,”IEEE Trans.Ultrason., Ferroelect., Freq. Contr., vol. 39, pp. 422–431, May 1992.
[12] M. R. Zaman and C. R. Moloney, “A comparison of adaptive filters foredge-preserving smoothing of speckle noise,” inProc. IEEE Int. Conf.Acoustics, Speech, and Signal Processing, 1993, pp. V-77–V-80.
[13] A. C. Bovik and D. C. Munson, Jr., “Boundary detection in speckle im-ages,” inProc. IEEE Int. Conf. Acoustics, Speech and Signal Processing,Tampa, FL, 1985, pp. 893–896.
[14] A. C. Bovik, “On detecting edges in speckle imagery,”IEEE Trans.Signal Processing, vol. 36, pp. 1618–1627, Oct. 1988.
[15] K. D. Donohue, M. Rahmati, L. G. Hassebrook, and P. Gopalakrishnan,“Parametric and nonparametric edge detection for speckle degradedimages,”Opt. Eng., vol. 32, pp. 1935–1946, Aug. 1993.
[16] M. Tur, K. C. Chin, and J. W. Goodman, “When is speckle noisemultiplicative?,” Appl. Opt., vol. 21, pp. 1157–1159, Apr. 1982.
[17] R. O. Duda and P. E. Hart, “Use of the Hough transform to detectlines and curves in pictures,”Commun. ACM, vol. 15, pp. 11–15, Jan.1972.
[18] Y. K. Lee and W. T. Rhodes, “Feature detection and enhancement bya rotating kernel min-max transformation,” inHybrid Image and SignalProcessing II, Proc. SPIE 1297, pp. 154–159, 1990.
[19] , “Scale- and rotation-invariant pattern recognition by a rotat-ing kernel min-max transformation,” inOptical Information-ProcessingSystems and Architectures II, Proc. SPIE 1347, pp. 146–155, 1990.
[20] , “Nonlinear image processing by a rotating kernel transforma-tion,” Opt. Lett., vol. 15, pp. 1383–1385, Dec. 1990.
[21] , “Invariant pattern recognition using angular signature functions,”Appl. Opt., vol. 32, pp. 4372–4377, Aug. 10, 1993.
[22] J. Hou and R. Bamberger, “Orientation selective operators for ridge,valley, edge, and line detection in imagery,” inProc. IEEE Int. Conf.Acoustics, Speech and Signal Processing, Adelaide, Australia, May1994, pp. V-25–V-28.
[23] , “A robust system for lineament analysis of aero-magneticimagery using orientation analysis and edge linking,” inProc. IEEEInt. Conf. Image Processing, Austin, TX, Nov. 1994, pp. I-963–I-967.
[24] R. N. Czerwinski, D. L. Jones, and W. D. O’Brien, Jr., “Edge detectionin ultrasound speckle noise,” inProc. IEEE Int. Conf. Image Processing,Austin, TX, Nov. 1994.
[25] K. S. Miller, Complex Stochastic Processes. Reading, MA: Addison-Wesley, 1974.
[26] H. V. Poor,An Introduction to Signal Detection and Estimation. Berlin,Germany: Springer-Verlag, 1988.
[27] H. Stark and J. W. Woods,Probability, Random Processes, and Es-timation Theory for Engineers. Englewood Cliffs, NJ: Prentice-Hall,1986.
[28] C. R. Baker, “Optimum quadratic detection of a random vector inGaussian noise,”IEEE Trans. Commun., vol. COMM-14, pp. 802–805,Dec. 1966.
[29] B. Picinbono and P. Duvaut, “Optimal linear-quadratic systems fordetection and estimation,”IEEE Trans. Inform. Theory, vol. 34, pp.304–311, Mar. 1988.
[30] H. L. Van Trees,Detection, Estimation, and Modulation Theory, Part I.New York: Wiley, 1968.
[31] R. N. Czerwinski, D. L. Jones, and W. D. O’Brien, Jr., “A comparisonof detection rules for lines and boundaries in acoustic speckle,” inProc.22nd Int. Symp. Acoustic Imaging, Florence, Italy, Sept. 1995.
[32] , “Decision directed line detection with application to medicalultrasound,” inMedical Imaging 1996: Image Processing, in Proc. SPIE2710, 1996, pp. 698–708.
[33] , “Detection of lines and curves in speckle images—Applicationto ultrasound imaging,”IEEE Trans. Med. Imag., to be published.
[34] W. H. Press, B. P. Flannery, S. A. Teukolsky, and W. T. Vetterling,Numerical Recipes in C. Cambridge, U.K.: Cambridge Univ. Press,1988.
[35] E. Andersonet al., LAPACK Users’ Guide. Philadelphia, PA: SIAM,1993.
[36] Matlab External Interface Guide. Natick, MA: MathWorks, 1993.[37] R. N. Czerwinski, D. L. Jones, and W. D. O’Brien, Jr., “Ultrasound
speckle reduction by directional median filtering,” inProc. IEEE Int.Conf. Image Processing, Washington, DC, Oct. 1995.
[38] T. Loupas, W. N. McDicken, and P. L. Allan, “An adaptive weightedmedian filter for speckle suppression in medical ultrasonic images,”IEEE Trans. Circuits Syst., vol. 36, pp. 129–135, Jan. 1989.
[39] I. A. Hein, J. A. Novakofski, and W. D. O’Brien, Jr., “Ultrasound dataacquisition system design for collecting high quality RF data from beefcarcasses in the slaughterhouse environment,” inProc. IEEE UltrasonicsSymp., Tuscon, AZ, 1992.
Richard N. Czerwinski (S’87–M’96) received theB.S.E.E. degree (cum laude) from Drexel Univer-sity, Philadelphia, PA, in 1990, and the M.S. andPh.D. degrees in 1993 and 1996, respectively, fromthe University of Illinois at Urbana-Champaign,both in electrical engineering.
He is presently a Member of the Technical Staffat the Lincoln Laboratory, Massachusetts Institute ofTechnology, Lexington, in the Systems and AnalysisGroup, working on problems of air defense. Hiscurrent research interests are in systems analysis,
statistical ultrasound signal and image processing, and time-frequency signalanalysis.
Dr. Czerwinski held a Drexel University Presidential Scholarship, and in1990 was honored by Drexel’s Alumni Association as an Outstanding Senior.In 1996, he took first place in the 27th Annual Student Paper Competition,sponsored by the University of Illinois chapter of Sigma Xi. He is a memberand former chapter officer of Eta Kappa Nu and Tau Beta Pi.
Douglas L. Jones(S’82–M’87) received the B.S.E.E., M.S.E.E., and Ph.D.degrees from Rice University, Houston, TX, in 1983, 1986, and 1987,respectively.
During the 1987–1988 academic year, he was at the University of Erlangen-Nuremberg, Germany, on a Fulbright Post-doctoral Fellowship. Since 1988,he has been with the University of Illinois, Urbana-Champaign, where he iscurrently an Associate Professor. In spring 1995, he was on sabbatical at theUniversity of Washington. He is an author of the laboratory textbook,A DigitalSignal Processing Laboratory Using the TMS32010(Englewood Cliffs, NJ:Prentice-Hall, 1988). His research interests are in digital signal processing,including time-frequency and time-varying signal analysis, adaptive filters,and various applications.
Dr. Jones is currently serving as an Associate Editor for the IEEE SIGNAL
PROCESSING LETTERS.

1714 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 7, NO. 12, DECEMBER 1998
William D. O’Brien, Jr. (M’70–SM’79–F’89) re-ceived the B.S., M.S., and Ph.D. degrees in 1966,1968, and 1970, respectively, from the Universityof Illinois, Urbana-Champaign.
From 1971 to 1975, he worked with the Bureauof Radiological Health (currently the Center forDevices and Radiological Health), U.S. Food andDrug Administration. Since 1975, he has been atthe University of Illinois, where he is a Professorof electrical and computer engineering and bio-engineering in the College of Engineering, and
Professor of bioengineering in the College of Medicine. He is the Directorof the Bioacoustics Research Laboratory, and Program Director of the NIHRadiation Biophysics and Bioengineering in Oncology Training Program. Hisresearch interests involve the many areas of ultrasound-tissue interaction,including spectroscopy, risk assessment, biological effects, dosimetry, tissuecharacterization, acoustic microscopy, and imaging. He has published morethan 180 papers in these fields.
Dr. O’Brien is Editor-in-Chief of the IEEE TRANSACTIONS ONULTRASONICS,FERROELECTRICS, ANDFREQUENCY CONTROL. He is a Fellow of the AcousticalSociety of America (ASA) and the American Institute of Ultrasound inMedicine (AIUM), and a Founding Fellow of American Institute of Medicaland Biological Engineering. He was recipient of the IEEE Centennial Medal(1984), the AIUM Presidential Recognition Awards (1985 and 1992), theAIUM/WFUMB Pioneer Award (1988), the IEEE Outstanding Student BranchCounselor Award (1989), and the AIUM Joseph H. Holmes Basic SciencePioneer Award (1993). He has been President (1982–1983) of the IEEE Sonicsand Ultrasonics Group (currently the IEEE UFFC Society), Co-Chairmanof the 1981 IEEE Ultrasonic Symposium, General Chairman of the 1988IEEE Ultrasonics Symposium, and is currently its 1997–1998 DistinguishedLecturer. He has also been President of the AIUM (1988–1991) and Treasurerof the World Federation for Ultrasound in Medicine and Biology (1991–1994).