Embed Size (px)
Citation preview

August 2001 Lesson 3 1
Lesson 3
Digitally-Controlled Single-Phase AC/DCIntegrated PWM Converter
Lesson 3Lesson 3
Digitally-Controlled Single-Phase AC/DCIntegrated PWM Converter

August 2001 Lesson 3 2
Goal of the workGoal of the work
Development of a new topology of single phaseinsulated ac/dc converter featuring:
• high power factor• full control of the output dc voltage• high-frequency insulation transformer• high-frequency line filter inductor.
Development of a new topology of single phaseinsulated ac/dc converter featuring:
• high power factor• full control of the output dc voltage• high-frequency insulation transformer• high-frequency line filter inductor.

August 2001 Lesson 3 3
Presentation OutlinePresentation OutlinePresentation Outline
• Converter topology-operation modes-structural constraints
• Design procedure• Control strategy
-analog control-digital control
• Experimental results
•• Converter topologyConverter topology-- operation modesoperation modes-- structural constraintsstructural constraints
•• Design procedureDesign procedure•• Control strategyControl strategy
-- analog controlanalog control-- digital controldigital control
•• Experimental resultsExperimental results

August 2001 Lesson 3 4
Ug
InsulationTransformer
Rectifierand
Load Stages
Lf
S1 S2
S3 S4
+ - + -CfUd
+
-
Up
Ig
PFC Boost Stage Inverter Stage
Basic AC/DC TopologyBasic AC/DC Basic AC/DC TopologyTopology

August 2001 Lesson 3 5
Integrated Converter TopologyIntegrated Converter TopologyIntegrated Converter Topology
Ug
Load
Lf
S1 S2
S3 S4
D1 D2
D3a D4a
D3b D4b
+ -
+ -
Cf
Udc
+
-
Up
Ig

August 2001 Lesson 3 6
Converter Modes of OperationConverter Modes of OperationSwitches are driven so as toSwitches are driven so as togenerate generate poweringpowering and and free-free-wheelingwheeling phases. phases.
Free-wheeling phases are obtainedFree-wheeling phases are obtainedclosing the two closing the two high-sidehigh-side or the or thetwo two low-sidelow-side switches. switches.
The two free-wheeling phasesThe two free-wheeling phaseshave have opposite effectopposite effect on the on theconverter input current thusconverter input current thusallowing control of the currentallowing control of the currentwaveform.waveform.
Ug
Load
Lf
S1 S2
S3 S4
D1 D2
D3aD4a
D3b D4b
+ -
+ -
Cf
Udc
+
-
Up
Ig
The converter integrates the PFC and inverter stages butloses some degree of control. This limits the line (or load)side performance.
The converter The converter integrates the PFC and inverter stagesintegrates the PFC and inverter stages but butloses some degree of control. This loses some degree of control. This limitslimits the line (or load) the line (or load)side performance.side performance.

August 2001 Lesson 3 7
Converter Operation TableConverter Operation Table
Switches ON Diodes ON Ug Up Ig
S1-S2 D1, D3a, D4b > 0 0 decrease S3-S4 D3a, D4b > 0 0 increase S1-S4 (D1), D3a, D4b > 0 +Udc decrease S2-S3 D3a, D4b > 0 -Udc increase
S1-S2 D2, D3b, D4a < 0 0 increase S3-S4 D3b, D4a < 0 0 decrease S1-S4 D3b, D4a < 0 +Udc decrease S2-S3 (D2), D3b, D4a < 0 -Udc increase
Switches ON Diodes ON Ug Up Ig
S1-S2 D1, D3a, D4b > 0 0 decrease S3-S4 D3a, D4b > 0 0 increase S1-S4 (D1), D3a, D4b > 0 +Udc decrease S2-S3 D3a, D4b > 0 -Udc increase
S1-S2 D2, D3b, D4a < 0 0 increase S3-S4 D3b, D4a < 0 0 decrease S1-S4 D3b, D4a < 0 +Udc decrease S2-S3 (D2), D3b, D4a < 0 -Udc increase

August 2001 Lesson 3 8
Operation ConstraintsOperation Constraints
•The duration of the powering phases must be thesame to avoid output transformer saturation.•The modulation period, Tsw, is then divided intothree phases:• positive powering phase: duration M/2·Tsw
• negative powering phase: duration M/2·Tsw
• free-wheeling phase: duration (1 - M)·Tsw
•During the free-wheeling phase, input currentcontrol is possible.
•The duration of the powering phases must be thesame to avoid output transformer saturation.•The modulation period, Tsw, is then divided intothree phases:• positive powering phase: duration M/2·Tsw
• negative powering phase: duration M/2·Tsw
• free-wheeling phase: duration (1 - M)·Tsw
•During the free-wheeling phase, input currentcontrol is possible.

August 2001 Lesson 3 9
Operation ConstraintsOperation ConstraintsThe input current can be controlled only during thefree-wheeling phases of the load side control.The input current can be controlled only during thefree-wheeling phases of the load side control.
dc
o
UUM ====
dc
o
UUM ====
dcmaxg
dcming
U2M1U
U2MU
⋅⋅⋅⋅��������
������������
���� −−−−====
⋅⋅⋅⋅====
dcmaxg
dcming
U2M1U
U2MU
⋅⋅⋅⋅��������
������������
���� −−−−====
⋅⋅⋅⋅====
The input current control is possibleonly when:The input current control is possibleonly when:
When the modulation When the modulation index M isindex M ishigh,high, the available time for the input the available time for the inputcurrent control is current control is small.small.
Ugmin<|Ug(θθθθ)|<Ugmax , whereUgmin<|Ug(θθθθ)|<Ugmax , where

August 2001 Lesson 3 10
Operation ConstraintsOperation Constraints
Average ac voltage at converter input andcorresponding input current control angle φφφφAverage ac voltage at converter input andcorresponding input current control angle φφφφ
M2
Udc
M2
(1- ) Udc
Uac
φφφφ2 Ug
Ug ConverterLf Uac
+
-
Ig

August 2001 Lesson 3 11
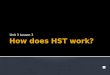
Maximum allowed duty-cycle M and dc link voltageto peak input voltage ratio as a function of the linecurrent control angle φφφφ
Maximum allowed duty-cycle M and dc link voltageto peak input voltage ratio as a function of the linecurrent control angle φφφφ
Mmax
Udcm
Ugpk
0 30 60 90 120 150 1800
1
2
φφφφ = 120°MMAX = 0.67Udc_max = 1.5 Ug_pk
φφφφ = 120°MMAX = 0.67Udc_max = 1.5 Ug_pk
Operation ConstraintsOperation Constraints

August 2001 Lesson 3 12
Converter Converter DesignDesignFrom the previous graphs the following designprocedure can be adopted:• Select maximum dc link voltage, based on
switches’ voltage rating;• Given the peak line voltage, the design
diagram allows to determine the maximumachievable M value;• The same diagram also allows to determine the
line control angle φφφφ, that should be equal orhigher than 120°, to get a satisfactory PF andcurrent THD.
From the previous graphs the following designprocedure can be adopted:• Select maximum dc link voltage, based on
switches’ voltage rating;• Given the peak line voltage, the design
diagram allows to determine the maximumachievable M value;• The same diagram also allows to determine the
line control angle φφφφ, that should be equal orhigher than 120°, to get a satisfactory PF andcurrent THD.

August 2001 Lesson 3 13
Converter DesignConverter DesignPassive components’ selection:• Given the desired input current ripple, input
inductance is given by:
Passive components’ selection:• Given the desired input current ripple, input
inductance is given by:
Lppsw
dcf If4
UL∆∆∆∆⋅⋅⋅⋅⋅⋅⋅⋅
====Lppsw
dcf If4
UL∆∆∆∆⋅⋅⋅⋅⋅⋅⋅⋅
====
dcdcppline
outf UUf2
PC⋅⋅⋅⋅∆∆∆∆⋅⋅⋅⋅⋅⋅⋅⋅ππππ⋅⋅⋅⋅
====dcdcppline
outf UUf2
PC⋅⋅⋅⋅∆∆∆∆⋅⋅⋅⋅⋅⋅⋅⋅ππππ⋅⋅⋅⋅
====
• Given the desired low frequency output voltageripple, the dc link capacitor can be selectedaccording to:
• Given the desired low frequency output voltageripple, the dc link capacitor can be selectedaccording to:
Udc = dc link voltageUdc = dc link voltage
Pout = output powerPout = output power

August 2001 Lesson 3 14
Converter DesignConverter Design
The maximum stresses for the active componentsare:• Voltage stress equal to the DC link voltage• Current stress for the upper switches as in
any standard inverter• Current stress for the lower switches and
diodes is the sum of inverter load side andline side currents
The maximum stresses for the active componentsare:• Voltage stress equal to the DC link voltage• Current stress for the upper switches as in
any standard inverter• Current stress for the lower switches and
diodes is the sum of inverter load side andline side currents

August 2001 Lesson 3 15
Converter ControlConverter Control•We considered both an analog and a digitalcontrol technique.• The analog solution is based on a standardPFC controller and on a modified phase-shiftmodulator for full-bridge converters.• The digital solution is based on a dead-beattype of control equation and on a customdigital PWM modulator.• In both cases the output voltage may becontrolled by a standard regulator (e.g. PID).
•We considered both an analog and a digitalcontrol technique.• The analog solution is based on a standardPFC controller and on a modified phase-shiftmodulator for full-bridge converters.• The digital solution is based on a dead-beattype of control equation and on a customdigital PWM modulator.• In both cases the output voltage may becontrolled by a standard regulator (e.g. PID).

August 2001 Lesson 3 16
S1-3
S2-4
Up
Ramp
-Udc
+Udc
VUoVIg
VUo+VIg
S1-3
S2-4
Up
Ramp
-Udc
+Udc
VUoVIg
VUo+VIg
+
+
+
-
-
-
C2
C3
C1
+VUo
VIg LOGIC
S1-3
S2-4
Ramp
+
+
+
-
-
-
C2
C3
C1
+VUo
VIg LOGIC
S1-3
S2-4
Ramp
Analog PWMmodulatorAnalog PWMmodulator
Analog Converter ControlAnalog Converter Control

August 2001 Lesson 3 17
S 1 -3
S 2 -4
U p
R
-U d c
+ U d c
V IgV U o
V U o + V Ig
S 1 -3
S 2 -4
U p
R
-U d c
+ U d c
V IgV U o
V U o + V Ig
Control of the free-wheeling phaseControl of the free-wheeling phaseAnalog Converter ControlAnalog Converter Control

August 2001 Lesson 3 18
Symmetricalpositioning ofswitching pulsesrequires twoadditionalcommutations
Symmetricalpositioning ofswitching pulsesrequires twoadditionalcommutations0
1
0
1
0
1S1-3
S2-4
0 10 20 30 40 50[µs]
-1
0
1
Up
Analog Converter ControlAnalog Converter Control

August 2001 Lesson 3 19
Analog Converter ControlAnalog Converter Control
• The input variables of the PWM modulator, i.e.VUo and VIg, must be provided by the outputvoltage and input current regulators.• The output voltage regulator may be any ofthose used for forward converters. A simplesolution might be voltage mode control withPID regulator.• The input current regulator may be a standardaverage current PFC controller with analogmultiplier.
• The input variables of the PWM modulator, i.e.VUo and VIg, must be provided by the outputvoltage and input current regulators.• The output voltage regulator may be any ofthose used for forward converters. A simplesolution might be voltage mode control withPID regulator.• The input current regulator may be a standardaverage current PFC controller with analogmultiplier.

August 2001 Lesson 3 20
Digital Converter ControlDigital Converter Control
•Digital implementation requires significantcomputational power to allow input current,DC link voltage and output voltage control.• Flexibility in the PWM modulator is required toimplement the non-standard modulationstrategy.• Texas Instruments TMS320F240 DSP is thehardware platform selected for the practicalimplementation.
•Digital implementation requires significantcomputational power to allow input current,DC link voltage and output voltage control.• Flexibility in the PWM modulator is required toimplement the non-standard modulationstrategy.• Texas Instruments TMS320F240 DSP is thehardware platform selected for the practicalimplementation.

August 2001 Lesson 3 21
Digital Converter ControlDigital Converter Control
The control system is organized as follows:
• Digital PWM
• Input current control loop
• Output voltage control loop (not implemented)
• DC link voltage control loop
The control system is organized as follows:
• Digital PWM
• Input current control loop
• Output voltage control loop (not implemented)
• DC link voltage control loop

August 2001 Lesson 3 22
Digital Converter ControlDigital Converter Control
PWMPWM PowerConverter
PowerConverter
Input CurrentControl
Input CurrentControl
igig
Output VoltageControl
Output VoltageControl
UoUo
DC LinkVoltageControl
DC LinkVoltageControl
UdcUdc
geqgeq
γγγγγγγγ
MM
Digital control block diagramDigital control block diagram

August 2001 Lesson 3 23
• The PWM implementation uses one of thethree DSP internal counters. It is programmedfor a period of 50 µµµµs (20kHz).• Three PWM outputs are used to generate thelogic state of two inverter legs.• The CMP input registers of the PWM units areloaded with values which are related to theload duty-cycle (M) and line “duty-cycle” γγγγ.• The duty-cycles are generated by externalloops (output voltage and line current loops).
• The PWM implementation uses one of thethree DSP internal counters. It is programmedfor a period of 50 µµµµs (20kHz).• Three PWM outputs are used to generate thelogic state of two inverter legs.• The CMP input registers of the PWM units areloaded with values which are related to theload duty-cycle (M) and line “duty-cycle” γγγγ.• The duty-cycles are generated by externalloops (output voltage and line current loops).
Digital PWMDigital PWM

August 2001 Lesson 3 24
Digital PWMDigital PWM
PWM1PWM1PWM2PWM2PWM3PWM3PWM3 and PWM1PWM3 and PWM1
γγγγ + Mγγγγ + Mγγγγ + M/2γγγγ + M/2M/2M/2
M/2M/2 γγγγγγγγM/2M/2
1 - γγγγ1 - γγγγ
CLK1CLK1

August 2001 Lesson 3 25
Digital PWMDigital PWM
• This solution allows simultaneous andindependent variation of the input variables.• Its response time is equal to one modulationperiod (worst case).• The constraint
• This solution allows simultaneous andindependent variation of the input variables.• Its response time is equal to one modulationperiod (worst case).• The constraint
γγγγmax = 1 - Mγγγγmax = 1 - M
requires the definition of a strategy to dealwith the interactions between the two loops.requires the definition of a strategy to dealwith the interactions between the two loops.

August 2001 Lesson 3 26
Digital PWMDigital PWM• The strategy we applied is to give the highestpriority to the output voltage control loop.•When the output voltage controller requires asudden variation of the parameter M, this isperformed even if input current control is lost.• The input current controller must be capableof tolerating this momentary control losseswithout generating persisting oscillationsand/or instabilities.• These problems arise only in the presence oftransients at the load side.
• The strategy we applied is to give the highestpriority to the output voltage control loop.•When the output voltage controller requires asudden variation of the parameter M, this isperformed even if input current control is lost.• The input current controller must be capableof tolerating this momentary control losseswithout generating persisting oscillationsand/or instabilities.• These problems arise only in the presence oftransients at the load side.

August 2001 Lesson 3 27
Digital PWMDigital PWM
M step variationM step variation
S1-3 logic stateS1-3 logic state
S2-4 logic stateS2-4 logic state
Dynamic response of the PWM modulatorDynamic response of the PWM modulator

August 2001 Lesson 3 28
Input current controlInput current control
���� ���� ττττττττ−−−−ττττ⋅⋅⋅⋅====ττττττττ⋅⋅⋅⋅====t
0
t
0acg
fLf
fg d)(U)(U
L1d)(U
L1)t(i ���� ���� ττττττττ−−−−ττττ⋅⋅⋅⋅====ττττττττ⋅⋅⋅⋅====
t
0
t
0acg
fLf
fg d)(U)(U
L1d)(U
L1)t(i
• The input current dynamic equation is thefollowing:• The input current dynamic equation is thefollowing:
• This can be discretized by assuming thevoltage to be constant between samplinginstants (zero order hold discretization).
• This can be discretized by assuming thevoltage to be constant between samplinginstants (zero order hold discretization).

August 2001 Lesson 3 29
Input current controlInput current control• The input inductor average voltage in amodulation period can be easily found to be:• The input inductor average voltage in amodulation period can be easily found to be:
f
swdc
f
swggg
LT)k(U)M1()k(
2M
LT)k(U)k(i)1k(i
⋅⋅⋅⋅⋅⋅⋅⋅������������
��������
���� −−−−⋅⋅⋅⋅δδδδ++++−−−−
++++⋅⋅⋅⋅====−−−−++++
f
swdc
f
swggg
LT)k(U)M1()k(
2M
LT)k(U)k(i)1k(i
⋅⋅⋅⋅⋅⋅⋅⋅������������
��������
���� −−−−⋅⋅⋅⋅δδδδ++++−−−−
++++⋅⋅⋅⋅====−−−−++++
)]M1(2M[UUU dcgLf −−−−⋅⋅⋅⋅δδδδ++++⋅⋅⋅⋅−−−−==== )]M1(2M[UUU dcgLf −−−−⋅⋅⋅⋅δδδδ++++⋅⋅⋅⋅−−−−====
•Consequently, the current variation in amodulation period is given by:•Consequently, the current variation in amodulation period is given by:

August 2001 Lesson 3 30
Input current controlInput current control• The quantity δδδδ⋅⋅⋅⋅Tsw is the duration of the upper (orpositive) free-wheeling phase.• It is possible to calculate δδδδ(k+1) so as to force thecurrent ig to reach its reference at instant k+2.• This generates the following control equation:
• The quantity δδδδ⋅⋅⋅⋅Tsw is the duration of the upper (orpositive) free-wheeling phase.• It is possible to calculate δδδδ(k+1) so as to force thecurrent ig to reach its reference at instant k+2.• This generates the following control equation:
[[[[ ]]]]
.M1
MU)M1()k(U2
)M1(UTL)k(i)k(Ug)k()1k(
dc
g
dcsw
fggeq
−−−−−−−−
⋅⋅⋅⋅−−−−⋅⋅⋅⋅
++++
++++−−−−⋅⋅⋅⋅⋅⋅⋅⋅
⋅⋅⋅⋅−−−−⋅⋅⋅⋅−−−−δδδδ−−−−====++++δδδδ [[[[ ]]]]
.M1
MU)M1()k(U2
)M1(UTL)k(i)k(Ug)k()1k(
dc
g
dcsw
fggeq
−−−−−−−−
⋅⋅⋅⋅−−−−⋅⋅⋅⋅
++++
++++−−−−⋅⋅⋅⋅⋅⋅⋅⋅
⋅⋅⋅⋅−−−−⋅⋅⋅⋅−−−−δδδδ−−−−====++++δδδδ

August 2001 Lesson 3 31
Input current controlInput current control• The control equation assumes that• The control equation assumes that
)k(Ug)2k(i geqg ⋅⋅⋅⋅====++++ )k(Ug)2k(i geqg ⋅⋅⋅⋅====++++
i.e. Ug is slowly varying with respect to the controlperiod.
•Geq is the converter equivalent input conductance.This is generated by the DC link voltage controlloop.
i.e. Ug is slowly varying with respect to the controlperiod.
•Geq is the converter equivalent input conductance.This is generated by the DC link voltage controlloop.

August 2001 Lesson 3 32
Input current controlInput current control• The control equation is difficult to implementbecause it implies the execution of divisions.• The variation of the DC link voltage can beneglected, i.e. Udc ≅≅≅≅ constant.• The variation of M can be dealt with defining anew control variable:
• The control equation is difficult to implementbecause it implies the execution of divisions.• The variation of the DC link voltage can beneglected, i.e. Udc ≅≅≅≅ constant.• The variation of M can be dealt with defining anew control variable:
[[[[ ]]]] )k()k(M1)k( δδδδ⋅⋅⋅⋅−−−−====γγγγ [[[[ ]]]] )k()k(M1)k( δδδδ⋅⋅⋅⋅−−−−====γγγγ
•While δδδδ can vary from 0 to 1 γγγγ can vary from 0 to1-M.•While δδδδ can vary from 0 to 1 γγγγ can vary from 0 to1-M.

August 2001 Lesson 3 33
Input current controlInput current control
[[[[ ]]]]
).k(MU
)k(U2UT
L)k(i)k(Ug)k()1k(
dc
g
dcsw
fggeq
−−−−⋅⋅⋅⋅
++++
++++⋅⋅⋅⋅
⋅⋅⋅⋅−−−−⋅⋅⋅⋅−−−−γγγγ−−−−====++++γγγγ [[[[ ]]]]
).k(MU
)k(U2UT
L)k(i)k(Ug)k()1k(
dc
g
dcsw
fggeq
−−−−⋅⋅⋅⋅
++++
++++⋅⋅⋅⋅
⋅⋅⋅⋅−−−−⋅⋅⋅⋅−−−−γγγγ−−−−====++++γγγγ
• The control equation can be re-written in termsof the γγγγ variable.• This way, only MAC instructions can be used.
• The control equation can be re-written in termsof the γγγγ variable.• This way, only MAC instructions can be used.
• This is the implemented current control equation.• The absolute value is required to deal with Ug < 0.• This is the implemented current control equation.• The absolute value is required to deal with Ug < 0.

August 2001 Lesson 3 34
Simulation of the proposed input current digitalcontrol was performed.Simulation of the proposed input current digitalcontrol was performed.
Converter Parameters
Line voltage Ug 240 ±±±± 10% VRMSOutput power Po 5 kWSwitching frequency fsw 20 kHzInput inductor Lf 1 mHDC link capacitor Cf 800 µµµµF
Converter Parameters
Line voltage Ug 240 ±±±± 10% VRMSOutput power Po 5 kWSwitching frequency fsw 20 kHzInput inductor Lf 1 mHDC link capacitor Cf 800 µµµµF
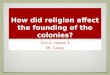
Current control simulationCurrent control simulation

August 2001 Lesson 3 35
0.06 0.062 0.064 0.066 0.068 0.070
5
10
15
20
25
30
35
40
[s]
[A]Input currentin a line half-period
Input currentin a line half-period
Current control simulationCurrent control simulation

August 2001 Lesson 3 36
Current control simulationCurrent control simulation
0.06 0.065 0.07 0.075 0.08-40
-30
-20
-10
0
10
20
30
40
[s]
Ug
ig_avg
-400
-300
-200
-100
0
100
200
300
400
[V][A]
Filtered linecurrent andline voltage atnominal outputpower
Filtered linecurrent andline voltage atnominal outputpower

August 2001 Lesson 3 37
Current control simulationCurrent control simulation
0.06 0.065 0.07 0.075 0.08-40
-30
-20
-10
0
10
20
30
40
0.06 0.065 0.07 0.075 0.08-8
-6
-4
-2
0
2
4
6
8
[s]
Ug
ig_avg
-400
-300
-200
-100
0
100
200
300
400
[V][A]
Filtered linecurrent and linevoltage at 10%of nominaloutput power
Filtered linecurrent and linevoltage at 10%of nominaloutput power

August 2001 Lesson 3 38
Current control simulationCurrent control simulation
[s]
[A]
0.02 0.022 0.024 0.026 0.028 0.030
5
10
15
20
25
30
35
40
45
50
Input currentcontrol stepresponse
Input currentcontrol stepresponse

August 2001 Lesson 3 39
DC link voltage controlDC link voltage control
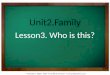
• The DC link voltage control can be implementedquite straightforwardly.• It is a simple PI regulator designed on theequivalent load resistance and DC link capacitor,as in any conventional PFC.• The bandwidth is limited to 10 - 15 Hz to avoidinput current distortion.• Sampling frequency can be reduced accordingly.In our implementation we used 1 kHz.
• The DC link voltage control can be implementedquite straightforwardly.• It is a simple PI regulator designed on theequivalent load resistance and DC link capacitor,as in any conventional PFC.• The bandwidth is limited to 10 - 15 Hz to avoidinput current distortion.• Sampling frequency can be reduced accordingly.In our implementation we used 1 kHz.

August 2001 Lesson 3 40
DC link voltage controlDC link voltage control
Open loop gainBode plot.Fcr = 15Hzmf = 70°
Open loop gainBode plot.Fcr = 15Hzmf = 70°

August 2001 Lesson 3 41
6
13
A/D conversion
Current loop
PWM
DC link voltage loop
[[[[µµµµs]
0
RTI
Main Loop
A/D conversion
Interrupt?No
YesDC link
PWM
RTI
7
22
Control implementationControl implementation
•The DC link voltage controlroutine is performed at1 kHz sampling frequency. Itrequires 7 µµµµs, including A/Dconversion.•The PWM routine, includingthe line current controller, isinstead executed at 20 kHz.This requires 22 µµµµs, againincluding A/D conversion.
•The DC link voltage controlroutine is performed at1 kHz sampling frequency. Itrequires 7 µµµµs, including A/Dconversion.•The PWM routine, includingthe line current controller, isinstead executed at 20 kHz.This requires 22 µµµµs, againincluding A/D conversion.

August 2001 Lesson 3 42
PWM implementationPWM implementation
S1-3S1-3
S2-4S2-4
MM

August 2001 Lesson 3 43
Experimental resultsExperimental resultsA prototype of the proposed converter was builtto test the digital controller.A prototype of the proposed converter was builtto test the digital controller.
Converter Parameters
Line voltage Ug 110 ±±±± 10% VRMSOutput power Po 0.5 kWSwitching frequency fsw 20 kHzInput inductor Lf 1.8 mHDC link capacitor Cf 500 µµµµF
Converter Parameters
Line voltage Ug 110 ±±±± 10% VRMSOutput power Po 0.5 kWSwitching frequency fsw 20 kHzInput inductor Lf 1.8 mHDC link capacitor Cf 500 µµµµF

August 2001 Lesson 3 44
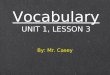
UgUg
igig
Experimental resultsExperimental results
PF = 0.98PF = 0.98
THD = 0.15THD = 0.15
M = 0.3M = 0.3
Pout = 0.3 kWPout = 0.3 kW
Ug 40V/divUg 40V/divig 2A/divig 2A/div

August 2001 Lesson 3 45
Experimental resultsExperimental results
UgUg
igig
PF = 0.96PF = 0.96
THD = 0.35THD = 0.35
M = 0.5M = 0.5
Pout = 0.45 kWPout = 0.45 kW
Ug 40V/divUg 40V/divig 2A/divig 2A/div

August 2001 Lesson 3 46
Experimental resultsExperimental results
UgUg
igig
PF = 0.97PF = 0.97
THD = 0.25THD = 0.25
M = 0.4M = 0.4
Pout = 0.35 kWPout = 0.35 kW
Ug 40V/divUg 40V/divig 2A/divig 2A/div

August 2001 Lesson 3 47
ReferenceReferenceL. Rossetto, S. Buso: “Digitally-Controlled Single-Phase AC/DC Integrated PWM Converter”, IEEE IASAnnual Meeting 2001, in press.
L. Rossetto, S. Buso: “Digitally-Controlled Single-Phase AC/DC Integrated PWM Converter”, IEEE IASAnnual Meeting 2001, in press.