-
8/17/2019 Lekcija i program
1/21
Simulacija dinamičkih sistema- Elementi numeričke
simulacije-
-
8/17/2019 Lekcija i program
2/21
Uvodna razmatranja
• Nakon što je uspostavljen matematički model dinamičkog
sistema,postavlja se pitanje kako taj model iskoristiti.• Sa
matematičkog aspekta, potrebno je riješiti sistem
diferencijalnihjednačina koje predstavljaju model. • U
opštem slučaju, jednačine nije moguće riješiti analitički (u
zatvorenoj formi), te je potrebno pozvati u pomoć numeričke
metodekoje su sastavni dio bilo kojeg softverskog alata za
simulacijudinamičkih sistema. • U nastavku će se
tretirati problem numeričkog rješenja običnihdiferencijalnih
jednačina ( ordinary differential equation -
ODE ).
Specijalni algoritmi su razvijeni i za rješenja tzv.
diferencijalno-algebarskih
jednačina ( differential-algebraic equations - DAE )
za
sisteme sa ograničenjima.
-
8/17/2019 Lekcija i program
3/21
Osnove numeričkih metoda
• Posmatrajmo model sistema u prostoru stanja.
• Ako se ulaz u(t ) u sistem posmatra kao poznata
funkcija vremena,
gornju jednačinu možemo posmatrati kao:
• Pretpostavimo da nam je poznato početno
stanje x(0) i da želimodobiti aproksimaciju
stanja x u tačkama (vremenskim trenucima):
• Zadatak algoritma je da generiše vrijednosti
kojeaproksimiraju:
-
8/17/2019 Lekcija i program
4/21
Osnove numeričkih metoda – Eulerov
metod
• Najjednostavniji algoritam se bazira na aproksimaciji
izvoda
konačnom razlikom:
gdje je
• Sada se može pisati:
• Posljednja relacija predstavlja suštinu Eulerove metode
( eksplicitne ),koja se često koristi u
jednostavnim simulacijama, iako nijenajefikasnija.
-
8/17/2019 Lekcija i program
5/21
Osnove numeričkih metoda – Eulerov
metod
• Algoritam za numeričko rješenje diferencijalnih
jednačina se u
opštem slučaju može bazirati na relaciji:
• Cijeli broj k govori o tome koliko je
prethodnih vrijednosti stanja
iskorišteno za evaluaciju novog stanja. Gornja relacija očito
odgovarametodi sa k koraka ( k-step
method ).• Ako funkcija G ne zavisi
od xn+1, tada se xn+1 može dobitijednostavnim
izračunavanjem izraza na desnoj strani jednačine. Utom slučaju
kažemo da je metoda
eksplicitna ( explicit ).• U suprotnom,
metoda je implicitna ( implicit ) jer se
jednačina morariješiti po varijabli xn+1.• Očito je da je
prikazana Eulerova metoda eksplicitna (iako postoji iimplicitna
metoda).
-
8/17/2019 Lekcija i program
6/21
Osnove numeričkih metoda - greška
• Vrlo je važno znati koliko je tačan dati metod u
rješavanju
diferencijalne jednačine. Prirodno je posmatrati tzv. globalnu
grešku ( global error ) koja je data
sa:
• Nažalost, ovu grešku nije lako izračunati. Stoga se
posmatra tzv.
lokalna greška ( one-step error, local
error ):
gdje je varijabla data sa:
• Ovo je greška koja se dobije korištenjem metode sa
jednimkorakom, uz uslov da se sve informacije iz prethodnih koraka
tačne.
-
8/17/2019 Lekcija i program
7/21
Osnove numeričkih metoda - greška
• Za Eulerovu metodu imamo:
• Znajući da vrijedi:
imamo:
•
Lokalna greška je dominantno određena veličinom h2
, daklekvadratom koraka diskretizacije. Detaljnijom analizom se
možepokazati da je globalna greška proporcionalna samom
korakudiskretizacije h.
-
8/17/2019 Lekcija i program
8/21
Osnove numeričkih metoda - stabilnost
• Pored tačnosti, vrlo važan aspekt diskretizacije s ciljem
rješenja
diferencijalne jednačine je stabilnost.• Konkretno,
potrebno je uspostaviti vezu između stabilnosti samenumeričke
metode i stabilnosti diferencijalne jednačine koja serješava. U tu
svrhu, posmatrajmo primjer skalarne diferencijalne
jednačine:
• Ako koristimo Eulerovu metodu, dobićemo:
• Rješenje ove diferentne jednačine je:
-
8/17/2019 Lekcija i program
9/21
Osnove numeričkih metoda - stabilnost
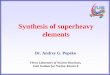
• Očito je da vrijede slijedeće implikacije:
• Regija stabilnosti za diferentnu jednačinu je disk
radijusa 1 sacentrom u tački (-1, 0). S druge strane, za
diferencijalnu jednačinu jeregija stabilnosti data sa . Za ,
će biti u regijistabilnosti (disk) ako je dovoljno malo.
Izvor:
Fabien, 2009
Regija stabilnosti
za explicitni ( forward )
Eulerov metod
-
8/17/2019 Lekcija i program
10/21
Runge-Kutta metode
• Posmatrajmo ponovo originalni problem.
• Prva relacija se može iskoristiti s ciljem dobijanja
slijedeće jednačine:
• Ako se sada integral aproksimira proizvodom dužine
intervala i vrijednosti podintegralne funkcije u sredini
intervala, može se dobiti:
-
8/17/2019 Lekcija i program
11/21
Runge-Kutta metode
• Problem predstavlja činjenica da veličina nije
poznata.
Međutim, na osnovu Eulerove metode imamo:
• Ako kombinujemo relacije (*) i (**), možemo pisati
slijedeće:
• Ovo je jednostavan primjer algoritma iz klase
Runge-Kutta
algoritama. Može se pokazati da je lokalnu greška
dominantnoodređena veličinom h3, što znači da je ova metoda za red
veličine
tačnija od eksplicitne Eulerove metode .
-
8/17/2019 Lekcija i program
12/21
Runge-Kutta metode
• Generalno, metoda Runge-Kutta je opisana slijedećim
jednačinama:
• Koeficijenti koji figurišu u Runge-Kutta metodi se
mogukompaktno zapisati pomoću Butcherove tablice ( Butcher
tableau ).
• Broj s, kao i svi pripadajućikoeficijenti se
određuju tako dametod obezbjeđuje traženi redtačnosti p,
odnosno da vrijedi:
-
8/17/2019 Lekcija i program
13/21
Runge-Kutta metode – klasični algoritam 4.
reda
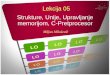
• Najčešće korišteni algoritam iz klase Runge-Kutta metoda
je
algoritam 4. reda. Konkretno, vrijedi da je , a
koeficijenti(koji nisu NULE) imaju slijedeće vrijednosti:
Butchertableau
Analogija sa
numeričkom integracijom
Primjer odabira koeficijenata (Simpsonovo pravilo)
-
8/17/2019 Lekcija i program
14/21
Adamsove metode
• Adamsove metode formiraju familiju metoda na bazi
više koraka.
Princip funkcionisanja ovih metoda se može zapisati na
slijedećinačin:
• Koeficijenti su odabrani tako da je red tačnosti što
veći. Ako sestavi , metoda je eksplicitna. Ova opcija odgovara
tzv. Adams-
Bashforth metodi. Ako se pak pretpostavi da je ,
metoda je
implicitna i naziva se Adams-Moulton metoda.
Najjednostavnije forme
eksplicitnih metoda su:
-
8/17/2019 Lekcija i program
15/21
Adamsove metode
• Najjednostavnije implicitne forme su date sa:
• Može se pokazati da je red tačnosti eksplicitnih metoda
jednak k , aimplicitnih metoda k + 1.
• Za implicitne forme, neophodno je riješiti jednačinu
(po xn ):
-
8/17/2019 Lekcija i program
16/21
Adamsove metode
• Ovo se može uraditi koristeći iterativnu proceduru, gdje
je početna
tačka generisana uz pomoć eksplicitne Adams-Bashforth
metode.• Postavlja se pitanje razloga korištenja implicitnih
metoda koje susloženije.• Jedan od razloga je što
implicitne metode obezbjeđuju znatno veće
regije stabilnosti od eksplicitnih metoda sa istim redom
tačnosti.• Vrijedi istaći i da se povećavanjem reda
tačnosti može suziti regijastabilnosti.
-
8/17/2019 Lekcija i program
17/21
Varijabilni korak diskretizacije
• Često nije preporučljivo koristiti konstantan korak
diskretizacije
prilikom rješavanja diferencijalnih jednačina. U pojedinim
intervalimarješenje može imati brze promjene gdje se zahtijeva
malen korak, dokintervali sa sporim promjenama dozvoljavaju veće
korake. • Metode automatskog podešavanja koraka su
uglavnom bazirane na
estimaciji lokalne greške. Pretpostavimo da imamo algoritam
kodkojeg je lokalna greška izražena u formi:
• Koeficijent C zavisi od rješenja i u pravilu
je nepoznat. Akoalgoritam prođe dva koraka dužine h, imamo:
jer se greške u dva uzastopna koraka sabiraju
(približno).
-
8/17/2019 Lekcija i program
18/21
Varijabilni korak diskretizacije
• Označimo sa vrijednost koju bi dao algoritam
ukoliko bi se
koristio korak dužine 2h od t n do t n+2. U
tom slučaju bi imali:
• Oduzimajući (*) od (**), dobije se:
• Posljednja jednačina se može iskoristiti za eliminaciju
varijable C izjednačine (*), tako da imamo:
• Ako je korak h dovoljno mali da bi se ostatak
mogao
zanemariti, tada desna strana posljednje jednačine sadrži
poznate
veličine što znači da imamo procjenu greške.
-
8/17/2019 Lekcija i program
19/21
Varijabilni korak diskretizacije
• Estimacija greške se može iskoristiti na razne načine,
ali generalno,
princip je se korak diskretizacije mijenja s obzirom na
grešku.• Ukoliko estimacija greške premaši neki unaprijed
zadani nivotolerancije ( absolute tolerance , relative
tolerance ), koji se zadaje od strane
korisnika, korak h se smanjuje. Obrnuto, ako je estimacija
greške
daleko ispod nivoa tolerancije, korak h se može
povećati. • Ovo je princip nekih od najviše korištenih
metoda za numeričkorješavanje diferencijalnih jednačina sa
adaptivnim korakom, poputDormand-Prince * metode (ode45),
Bogacki-Shampine metode (ode23) itd.
• Dormand-Prince metoda koristi dva rješenja sa stepenom
tačnosti 4
i 5. Razlika ova dva rješenja se koristi za procjenu greške, te
dalje zaadaptaciju koraka integracije.
* Pogledati dodatni materijal.
-
8/17/2019 Lekcija i program
20/21
Krute diferencijalne jednačine
• Krute ( stiff ) diferencijalne jednačine
su okarakterisane činjenicom da
njihova rješenja sadrže i “brze” i “spore” komponente i da je
razlikaodgovarajućih vremenskih konstanti značajna. • Za
ovakve jednačine je moguće da mala perturbacija početnihuslova može
prouzrokovati velike promjene u rješenju problema. •
Posmatrajmo sistem dat jednačinom:
• Rješenje navedenog sistema jednačina je dato
sa:
-
8/17/2019 Lekcija i program
21/21
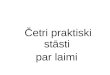
Krute diferencijalne jednačine
• Ako bismo htjeli simulirati ovakav sistem, morali bismo
početi sa
vrlo malim korakom da bi se “upratio” brzopromjenljivi
članpredstavljen sa .
• Međutim, djelovanje ovog člana brzo iščezava te je
rješenjekarakterisano samo članom . Kako ovaj član opisuje
mnogo
sporiju promjenu, logično je povećati korak, ali moramo voditi
računao uslovu stabilnosti.
• Proizvod mora biti unutar regije stabilnosti, što opet
zahtijeva manjikorak. Jedan način pristupa ovom problemu je
korištenje metoda sa
dovoljno velikom regijom stabilnosti tako da se može
napravitikompromis između stabilnosti i tačnosti.• Ovo je
jedan od razloga zašto se za rješenje stiff
problemauglavnom koriste implicitne metode (npr.
Rosenbrock metoda).