Embed Size (px)
Citation preview

Lecture III: Rigid-Body Physics

2
Rigid-Body Motion
• Previously: Point dimensionless objects moving through a trajectory.
• Today: Objects with dimensions, moving as one piece.

3
Rigid-Body Kinematics• Objects as sets of points.• Relative distances between all points are
invariant to rigid movement.• Movement has two components:
• Linear trajectory of a central point (“translation”).• Relative rotation around the point (“rotation”).

4
Rotational Motion• ! a point on to the object. • #⃗ is the center of rotation.• Distance vector $⃗ = ! − #⃗.
• $ = $⃗ : distance.• Object rotates ó !
travels along a circular path.• Unit-length axis of rotation: '⃗.
• 2D: '⃗=)̂ (“out” from the screen).• “Positive” Rotation: counterclockwise.
• right-hand rule.
$⃗× +,+- ∥ '⃗
#!(0)
$⃗
!(0 + ∆0)
45
'⃗

5
Rigid-Body Kinematics
• Object coordinate system.• Describing rigid-body motion:
• Moving origin• Rotating orientation.
• Both defined w.r.t. another frame!• i.e., the canonical “world coordinates”.

6
Representing Orientation
• Object axis system (rows):
R"($) ='("($)')"($)*+"($)
.
• Changes with time $.• An orthonormal (rotation matrix).
• Rotations are orientations!• Canonical ($ = 0) axes: can be arbitrary.
• The canonical choice R" 0 = -.×. is default (“world coordinates”).

7
• Every rotation can be represented by an axis "̂ and a angle #.• Angle-axis à rotation matrix:
$ = & + sin # + + (1 + cos #)+1
• K = ["̂]×=0 −"̂8 "̂9"̂8 0 −"̂:−"̂9 "̂: 0
• The cross-product matrix: +; = "̂×;
• Rotation matrix ß angle axis:# = acos =>? $ − 1
2
"̂ = 12ABC#
$D1 − $1D$ED − $DE$1E − $E1
• Not unique! Why?
Axis-Angle Representation

8
Quaternions
• Quaternions: ! = #, &⃗• Real part: scalar #.• Imaginary part: vector &⃗ ∈ ℝ).
• Unit quaternions: ! * = #* + &⃗ * = 1.• Quaternion multiplication:
- . ! = #/#0 − &/, &0 , #0&/ + #/&0 + &/×&0• Not commutative! - . ! ≠ ! . -.• Commutative iff &/×&0 = 0 (parallel vector parts).
• Inverse and conjugate: 5- = #,−&⃗ , -67 = 85- - 9.

9
Quaternions as rotations
• Rotations as unit quaternions:
! = cos &2 , sin&2 ,̂
• Vectors .⃗ ∈ ℝ1 ó imaginary quaternions 0, .⃗ .• Rotating vector .⃗ by &, ,̂ into vector 3 : 3=!.⃗!45.• Rotation composition: subsequent multiplication:
• Rotation of ! and then 6: 7⃗=63645 = 6!.⃗!48645= 6!.⃗ 6! 45 = 9.⃗945
• Where 9 = 6!.• Quaternions ó rotation matrices with same axis-angle.
• Mutual conversion: a bit technical.

10
Special case: 2D
• Axis is always "̂ = $̂.• Quaternion % = cos )* , sin
)* $̂ reduces to complex
number . = " /01 2. • Rotation of (complex) vector:3 = .*5⃗.• Remember "67 = −1?
• Rotation by :! (reflection through point).

11
Key-framing
• Interpolating between orientation quaternions !(t)and ! t + ∆' ?
• No single option!• Not even in 2D…
• Shortest rotation: ∆!(') = ! t + ∆' !(t))*• Can be applied: ! t + ∆' =∆!(')!(t).• What happens continuously?
http://help.autodesk.com/cloudhelp/2016/ENU/Maya/images/GUID-FC3CA5CD-1E25-4108-A002-712201DB0FF6.png

12
Instantaneous Rotation
• A body goes through orientations ! " (quaternion).
• The change of orientation, or derivative #!#$:%!%" =
12 0, + !
• What is +?

13
Angular Velocity• The speed of rotation around the rotation axis:
!(#) = !(#)'̂(#).• The angular velocity vector is collinear with the
rotation axis:• unit is ⁄)*+ ,-..• '̂(#): the instantaneous axis of rotation.

14
Angular Acceleration• Angular acceleration: the rate of change of the
angular velocity:
"⃗ = $%$&
• Paralleling definition of linear acceleration.
• Unit is '($/*+

16
Tangential and Angular Velocities• Every point moves with the same angular
velocity.• Direction of vector: "⃗.
• Tangential velocity vector:
#$ = &×(⃗ = )(⃗)*
Or:
& = (⃗×#⃗(+
• & = ⁄-. / (abs. values)
0 1(*)
1(* + ∆*)
6(*)
7(*)
01(*)
(⃗
1(* + ∆*)
8
&
#(*)

17
• Define original (object) coordinate system and orientation "⃗ 0 , % 0 .
• Position in world coordinates:&⃗ ' = "⃗ ' + *⃗ ' = "⃗ ' + % ' *⃗ 0 %+, ' .
• *⃗=&⃗-"⃗.• Combined velocity -⃗ ' :
• Linear (translational) component: -⃗∥ ' = 01⃗ 202
• Rotational component: -⃗3 ' = 04⃗ 202 = 5(')×*⃗(').
• But, are these always distinguishable?• Yes!• *⃗ ' only depends on % ' and *⃗ 0 and not on "⃗ ' .
Decomposing Movement

18
Combined Movement
• Position of every point
"⃗ # = "⃗% + '%
(
)⃗* # + )⃗∥ # ,#
• )⃗∥ # : translation of the object axis system.• )⃗* # =- # ×/⃗ # : obj. axis system rotation
around its “origin” 0⃗ # .• Question: how does the choice of obj. system
(axes+origin) matter?
Combined velocity )⃗

19
• "⃗# $ = &'⃗ (&( = ) $ ×+⃗ $
• What is the angular velocity ) for all points of the object?• The same! Since , is the same:
-+⃗ $-$ = -, $
-$ +⃗ 0 ,/0 $ + , $ +⃗ 0 -,/0 $-$ =
12 0,) +⃗ $ + 12 +⃗ $ 0, −) = 0,) $ ×+⃗ $
• How does the choice of center 6⃗ 0 matters for )?• Or the choice of +⃗ 0 .• And why?
• Note: ) is still represented in a (global, stationary, maybe canonical) axis system!
• Another world system = another representation = “different” ).
Invariance of Angular Velocity

20
Mass• The measure of the amount of matter in the
volume of an object:
! = #$% &'
• % : the density of each point the object volume '.• &': the volume element.
• Equivalently: a measure of resistance to motion or change in motion.

21
Mass• For a 3D object, mass is the integral over its
volume:
! = ###$(&, (, )) +& +( +)
• For uniform density ($ constant):
! = $ , -

22
Center of Mass• The center of mass (COM) is the “average” point
of the object, weighted by density:
!"# = 1&'
() * ,⃗ -.
• ,: point coordinates.• Point of balance for the object.• Uniform density: COM ó centroid.
COM

23
Center of Mass of System• A system of bodies has a mutual center of mass:
!"# = 1&'
()*
+&(-⃗(
• &(: mass of each body.• -(: location of individual COM.• &=∑()*+ &(.
• Example: two spheres in 1D
/012 = &*/* + &4/4&* + &4
COM56
57
87
8689:;

24
Center of Mass
• Quite easy to determine for primitive shapes
• What about complex surface based models?

25
Dynamics• The centripetal force creates curved
motion.
• In the direction of (negative) "⃗• Object is in orbit.
• Constant force ó circular rotation with constant tangential velocity.• Why?

26
Tangential & Centripetal Accelerations• Tangential acceleration "⃗ holds:
#⃗ = "⃗×&⃗
• cf. velocity equation '⃗ = (×&⃗.
• The centripetal acceleration drives the rotational movement:
#⃗) = *+, &̂ = −(/&⃗.
• What is the “centrifugal” force?

27
Angular Momentum• Linear motion è linear momentum: "⃗ = $%⃗.• Rotational motion è angular momentum about
any fixed relative point (to which '⃗ is measured):
( = )*
'⃗×"⃗ ,-.
• unit is / 0 $ 0 1• ,-. = -$ (mass element)
• Angular momentum is conserved!• Just like the linear momentum.
• Caveat: conserved w.r.t. the same axis system.

28
Angular Momentum• Plugging in angular velocity:
"⃗×$⃗ %& = "⃗×(⃗ %) = "⃗× *×"⃗ %)
• Integrating, we get:
+ = ,-"⃗× *×"⃗ %)
• Note: The angular momentum and the angular velocity are not generally collinear!

29
The inertia Tensor• Define: "⃗ =
$%&
and ' ='(')'*
• For a single rotating body: the angular velocity is constant.• We get:
+ = ,-"⃗× '×"⃗ /0 = ,
%1 + &1 '( − $%') − $&'*−%$'( + &1 + $1 ') − %&'*−&$'( − &%') + ($1 + %1)'*
/0 =
,%1 + &1 −$% −$&−%$ &1 + $1 −%&−&$ −&% ($1 + %1)
'(')'*
/0 =
6(( −6() −6(*−6)( 6)) −6)*−6*( −6*) 6**
'(')'*
.
• Note: replacing integral with a (constant) matrix operating on a vector!

30
The Inertia Tensor• The inertia tensor ! only depends on the geometry
of the object and the relative axis system (often, COM with principal axes):
"#$ = "$# = & '( )*
"#+ = "+# = & ', )*
"$+ = "+$ = & (, )*
"## = & (- + ,- )*
"$$ = & ,- + '- )*
"++ = & '- + (- )*
0⃗ ='(,

31
The Inertia Tensor• Compact form:
! =
# $% + '% () −# +$ () −# +' ()
−# +$ () # '% + +% () −# $' ()
−# +' () −# $' () # +% + $% ()
• The diagonal elements are called the (principal) moment of inertia.
• The off-diagonal elements are called products of inertia.

32
The Inertia Tensor• Equivalently, we separate mass elements to
density and volume elements:
! = #$% &, (, )
(* + )* −&( −&)−&( )* + &* −()−&) −() &* + (*
-& -( -)
• The diagonal elements: distances to the respective principal axes.
• The non-diagonal elements: products of the perpendicular distances to the respective planes.

33
Moment of Inertia• The moment of inertia !", with respect to a
rotation axis $⃗, measures how much the mass “spreads out”:
!" = &'
(" )*+• (": perpendicular distance to axis.• Through the central rotation origin point.
• Measures ability to resist change in rotational motion.• The angular equivalent to mass!

34
Moment and Tensor• We have: !" # = &⃗×!⃗ # for any point (⃗.
• Remember: !⃗ is originà (⃗.• Then, &⃗×!⃗ is closest point on axis à (⃗.
• We get:)" = ∫+ &⃗×!⃗ #,-=&⃗.)&⃗
• The scalar angular momentum around the axis is then /" = )"0".• 0" is the angular speed around &⃗.
• Reducible to a planar problem (axis as 1 axis).

35
• Suppose we have !, " in some system.• How do we find them in a rotated system #?• "$ = #&".
• Just a rotation of the axis!
• Insight: ! = ∫( *⃗ +,-×- − *⃗ 0 *⃗& 12• As *⃗$ = #&*⃗:
,$ = *⃗ +,-×- − #&*⃗ 0 *⃗&# == #& *⃗ +,-×- − *⃗ 0 *⃗& # = #&!#.
• Angular momentum is then: 3$ = !$"$ = #&!##&" = #&3
• Just the rotated vector!
Change of coordinates
Note: identity matrix ,-×-, not !!

36
• We said that angular velocity is the same regardless of the chosen (moving) center in the object axis system.
• But that is the angular velocity around this center.
• It does not mean that it is the same as the angular velocity around the origin of the world!
• Angular velocity appears even without “rotation”.
• Always know who "⃗ and #⃗ are measured against.• More geometrically: who is the axis of rotation.• Look at chalkboard.
Warning

37
Moment of Inertia• For a mass point:
! = # $ %&'
• For a collection of mass points:! = ∑) #)%)'
• For a continuous mass distribution on the plane:! = ∫+ %&' ,#
% #
%-#-
%' #'
%. #.
%,#

38
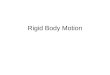
Inertia of Primitive Shapes
• For primitive shapes, the inertia can be expressed with the parameters of the shape
• Illustration on a solid sphere• Calculating inertia by integration of
thin discs along one axis (e.g. !).• Surface equation: "# + %# + !# = '#

39
Inertia of Primitive Shapes• Distance to axis of rotation is the radius of the disc at the
cross section along !: "# = %# + '# = (# − !#.
• Summing moments of inertia of small cylinders of inertia *+= ,-.
# along the z-axis:
/0+ =12 "
#/3 = 12 "
#4/5 = 12 "
#46"#/!• We get:
0+ = 7# 46 ∫9:
: ";/! = 7# 46 ∫9:
: (# − !# #/! = 7# 46[
](;! − 2(# ⁄!? 3
+ ⁄!A 5 9:: = 46 1 − ⁄2 3 + ⁄1 5 (A.
• As 3 = 4 ⁄4 3 6(?, we finally obtain: 0+ = #A3(
#.

40
Inertia of Primitive Shapes• Solid sphere, radius ! and mass ":
• Hollow sphere, radius ! and mass ":
# =
25"!
' 0 0
0 25"!
' 0
0 0 25"!
'
# =
23"!
' 0 0
0 23"!
' 0
0 0 23"!
'
xz
y

41
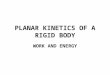
Inertia of Primitive Shapes• Solid ellipsoid, semi-axes !, ", # and mass $:
• Solid box, width %, height ℎ, depth ' and mass $:
( =
15$("
-+#-) 0 0
0 15$(!
-+#-) 0
0 0 15$(!
-+"-)
( =
112$(ℎ
-+'-) 0 0
0 112$(%
-+'-) 0
0 0 112$(%
-+ℎ-)
xz
y
wd
h

42
Inertia of Primitive Shapes• Solid cylinder, radius !, height ℎ and mass #:
• Hollow cylinder, radius !, height ℎ and mass #:
$ =
112#(3!
*+ℎ*) 0 0
0 112#(3!
*+ℎ*) 0
0 0 12#!
*
$ =
112#(6!
*+ℎ*) 0 0
0 112#(6!
*+ℎ*) 00 0 #!*
h
h

43
Parallel-Axis Theorem• We can compute the moment of inertia around an
axis "⃗ going through the COM.• How to efficiently calculate it for any parallel axis "⃗′?
• parallel axis theorem:
$%& = $% + )*+
• * is the distance between the axes.• Summary: it is easy to find the moment of inertia
for every axis and center from the “built-in” one.

44
Parallel-Axis Theorem• More generally, for point displacements:
!", !$, !%
&"" = ( )* + ,* !- +-!"*
&$$ = ( ,* + .* !- +-!$*
&%% = ( .* + )* !- +-!%*
&"$ = ( .) !- +-!"!$
&"% = ( ., !- +-!"!%
&$% = ( ), !- +-!$!%

46
Torque• A force "⃗ applied at a distance r
from the origin.
• Tangential part causes tangential acceleration:
"⃗# = % & '⃗#
• The torque (⃗ is defined as:(⃗ = )⃗×"⃗
• So we get( = % & ) & + & ) = %),+.
• unit is - & %• Induces the rotation of the system.

47
Newton’s Second Law
• The law "⃗ = $ % &⃗ has an equivalent formulation with the inertia tensor and torque:
'⃗ = ()⃗
• Force ó linear acceleration
• Torque ó angular acceleration

48
Torque and Angular Momentum• Reminder: linear: "⃗ = $%⃗
$& ('⃗: linear momentum).
• Similarly with torque and angular momentum:()(* =
(+⃗(* ×'⃗ + +⃗×
('⃗(* = .⃗×/.⃗ + +⃗×"⃗ = 0 + 1⃗
• Momentum-torque relation:()(* =
((34)(* = 3 (4(* = 36⃗ = 1⃗
• Force ó derivative of linear momentum.
• Torque ó derivative of angular momentum.

49
Rotational Kinetic Energy• Translating energy formulas to rotational motion.
• The rotational kinetic energy is defined as:
!"# =12'
( ⋅ * ⋅ '

50
Conservation of Mechanical Energy• Adding rotational kinetic energy
!"# $ + ∆$ + !' $ + ∆$ + !"( $ + ∆$= !"# $ + !' $ + !"(($) + !,
• !"# is the translational kinetic energy.• !' is the potential energy.• !"( is the rotational kinetic energy. • !, the “lost” energies (surface friction, air
resistance etc.).

51
Torque Impulse• We may apply off-center forces for a very short
amount of time.• Or as a collision.
• torque impulse à instantaneous change in angular momentum, i.e. in angular velocity:
!∆# = ∆%

52
Rigid Body Forces
• A force can be applied anywhere on the object, producing also a rotational motion.
• Q: how come two non-rotating objects can cause a rotation?
52
!"#$
%&

54
Complex Objects• When an object consists of multiple primitive shapes:
• Calculate the individual moment inertia of each shape around a the prescribed axis in the same coordinates system, and their individual origins.
• Use parallel axis theorem to transform to inertia to unified object coordinates.
• Add the moments together.
54