Embed Size (px)
Citation preview
Lecture 3
Review of Linear Algebra
Simple least-squares

9 things you need to remember from Linear Algebra

Number 1
rule for vector and matrix multiplication
u = Mv ui = k=1N Mik vk
P = QR Pij = k=1N Qik Rkj
Sum over nearest neighbor indices
Name of index in sum irrelevant. You can call it anything (as long as you’re consistent)

Number 2
transpostionrows become columns and columns become rows
(AT)ij = Aji
and rule for transposition of products
(AB)T = BT AT
Note reversal of order

Number 3
rule for dot product
ab = aT b = i=1N ai bi
noteaa is sum of squared elements of a
“the length of a”

Number 4
the inverse of a matrix
A-1 A = I
A A-1 = I
(exists only when A is square)
I is the identity matrix
1 0 0
0 1 0
0 0 1
Number 5
solving y=Mx using the inverse
x = M-1y
Number 6multiplication by identity matrix
M = IM = MI
in component notation Iij = ij
k=1N ik Mkj = Mij
k=1N ik Mkj = Mij
Just a name …
Cross out sum
Cross out ik
And change k to i in rest of equation
Number 7
inverse of a 22 matrix
a b
c dA =
d -b
-c aA-1 =
1
ad-bc
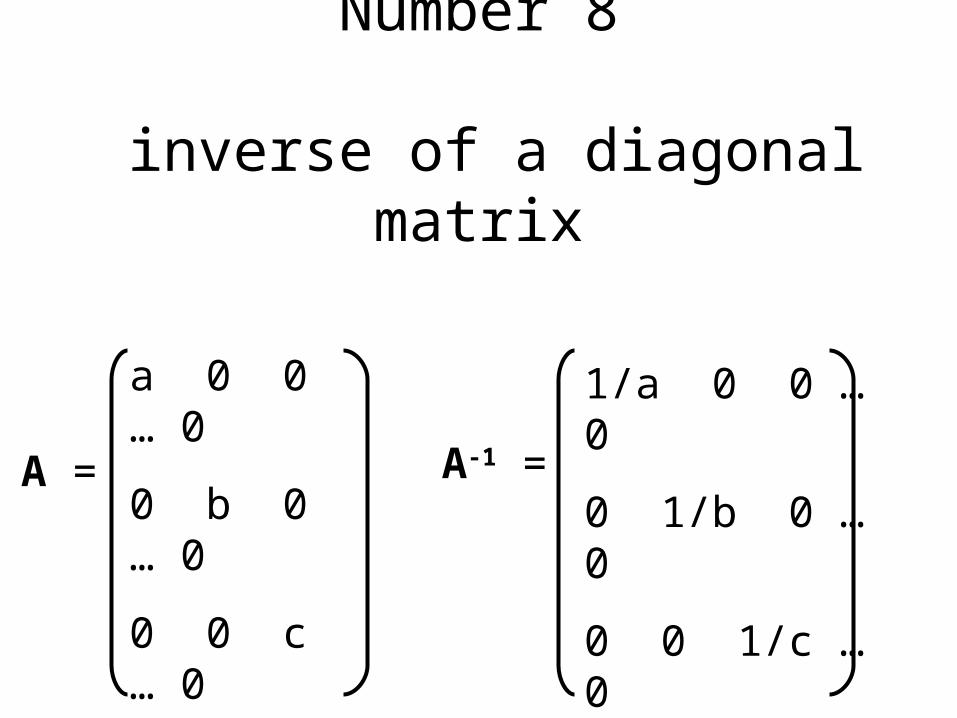
Number 8
inverse of a diagonal matrix
a 0 0 … 0
0 b 0 … 0
0 0 c … 0
...
0 0 0 …z
A = A-1 =
1/a 0 0 … 0
0 1/b 0 … 0
0 0 1/c … 0
...
0 0 0 …1/z

Number 9
rule for taking a derivative
use component-notationtreat every element as a independent variable
remember that since elements are independentdxi / dxj = ij = identity matrix

Example: Suppose y = Ax
How does yi vary as we change xj?
(That’s the meaning of the derivative dyi/dxj)
first write i-th component of y, yi = k=1N Aik xk
(d/dxj) yi = (d/dxj) k=1N Aik xk
= k=1N Aik dxk/dxj = k=1
N Aik kj = Aij
We’
re u
sing
I a
nd j,
so
use
a di
ffer
ent
lett
er,
say
k,
in t
he s
umm
atio
n!
So the derivative dyi/dxj is just Aij. This is analogous to the case for scalars, where the derivative dy/dx of the scalar expression y=ax is just dy/dx=a.

best fitting line
the combination ofapre and bpre
that have the smallestsum-of-squared-errors
find it by exhaustive search‘grid search’

Fitting line to noisy datayobs = a + bx
Observations: the vector, yobs

Guess values for a, bypre = aguess + bguessx
aguess=2.0
bguess=2.4
Prediction error =
observed minus predicted
e = yobs - ypre
Total error: sum of squared predictions errors
E = Σ ei2
= eT e

Systematically examine combinations of (a, b) on a 101101 grid
Error Surface
Minimum total error E is here
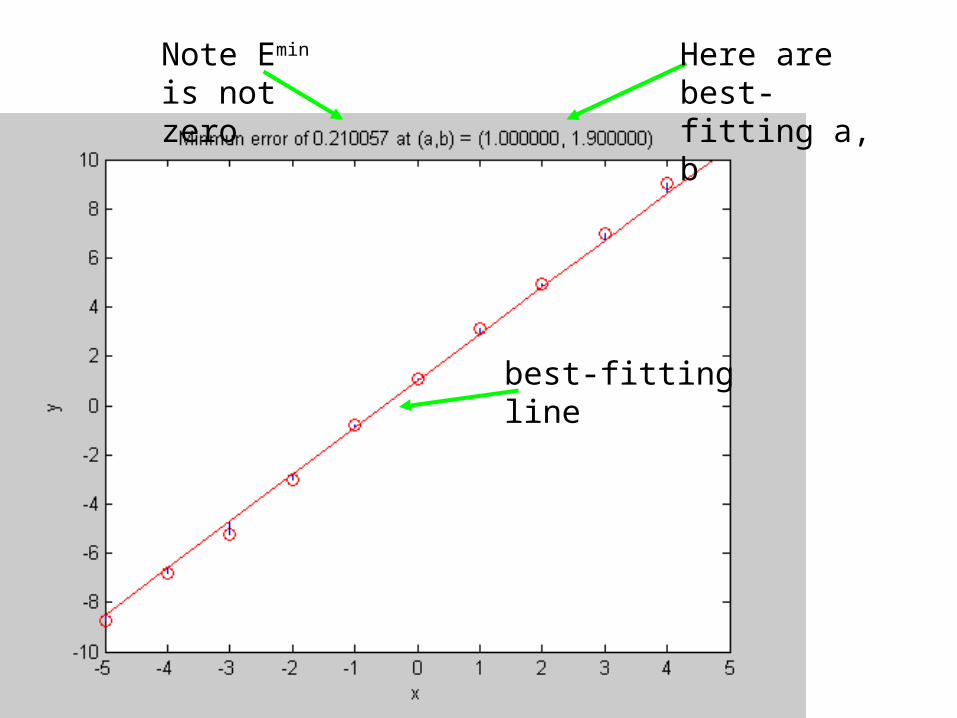
Note E is not zero
bpre
apre
Error Surface
Note Emin is not zero
Here are best-fitting a, b
best-fitting line
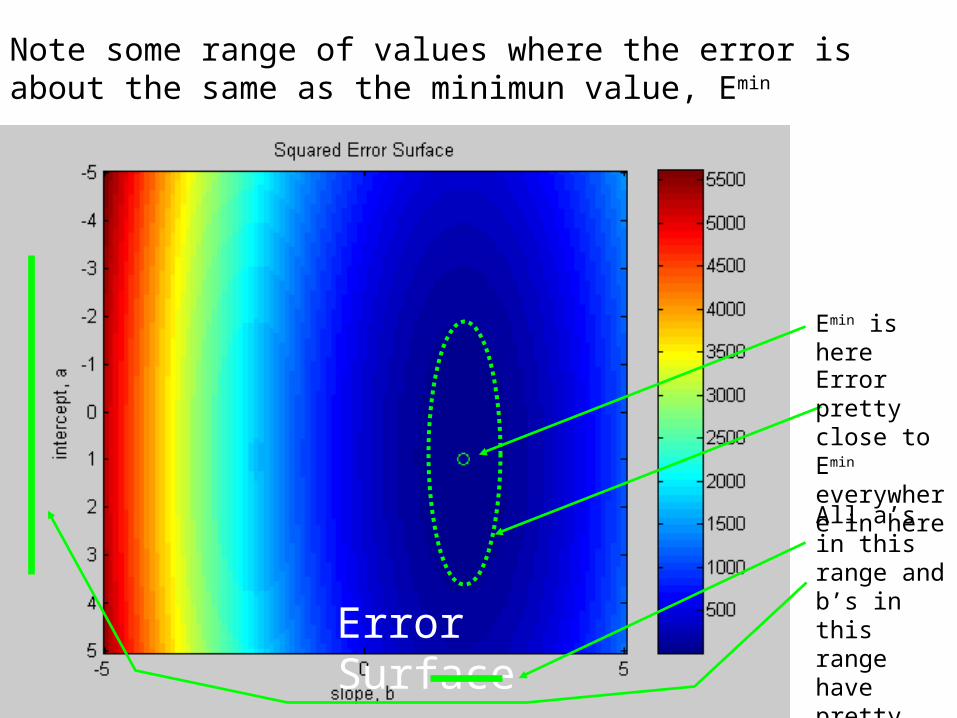
Note some range of values where the error is about the same as the minimun value, Emin
Error Surface
Emin is here
Error pretty close to Emin everywhere in here
All a’s in this range and b’s in this range have pretty much the same error
moral
the shape of the error surface
controls the accuracy by which (a,b) can be estimated
What controls the shape of theerror surface?
Let’s examine effect of increasing the error in the data

Error in data = 0.5
Error in data = 5.0
Emin = 0.20
Emin = 23.5
The minimum error increases, but the shame of the error surface is pretty much the same

What controls the shape of theerror surface?
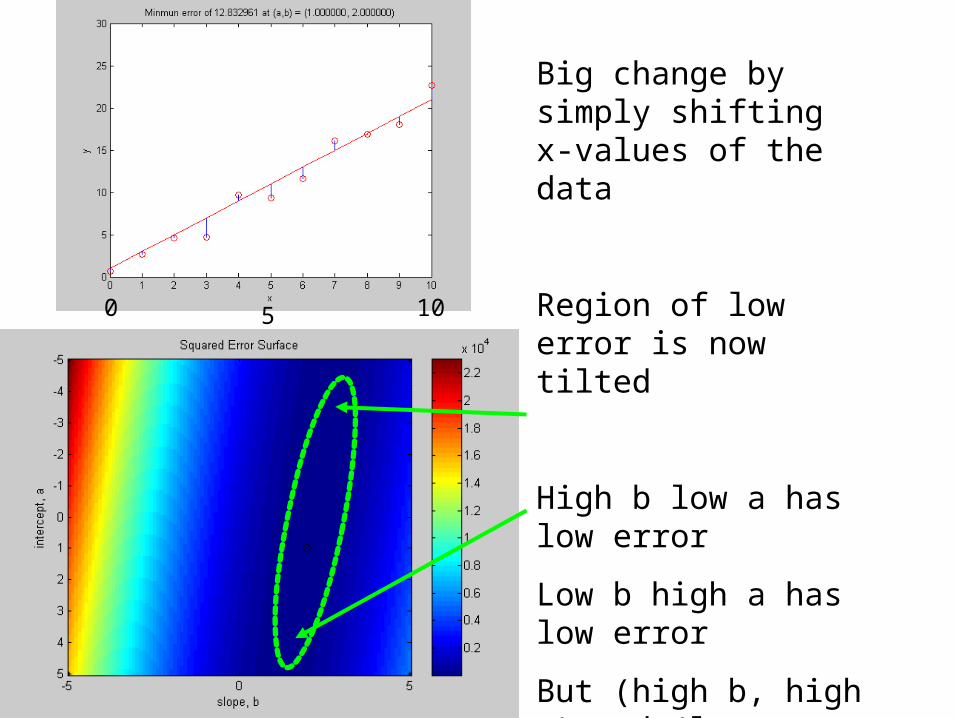
Let’s examine effect of shifting the x-position of the data
0 105
Big change by simply shifting x-values of the data
Region of low error is now tilted
High b low a has low error
Low b high a has low error
But (high b, high a) and (low a, low b) have high error
Meaning of tilted region of low error
error in (apre, bpre) arecorrelated
Best-fit
line
Best fit intercept
erroneous intercept
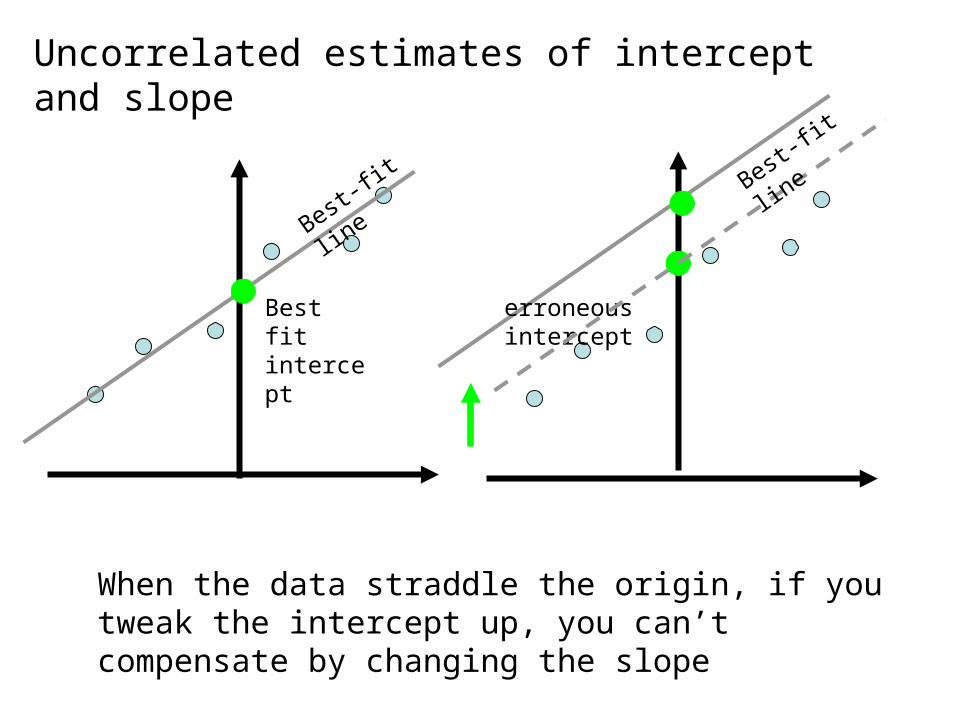
When the data straddle the origin, if you tweak the intercept up, you can’t compensate by changing the slope
Best-fit
line
Uncorrelated estimates of intercept and slope
Best-fit
line
Best fit intercept
Low slope line
erroneous intercept
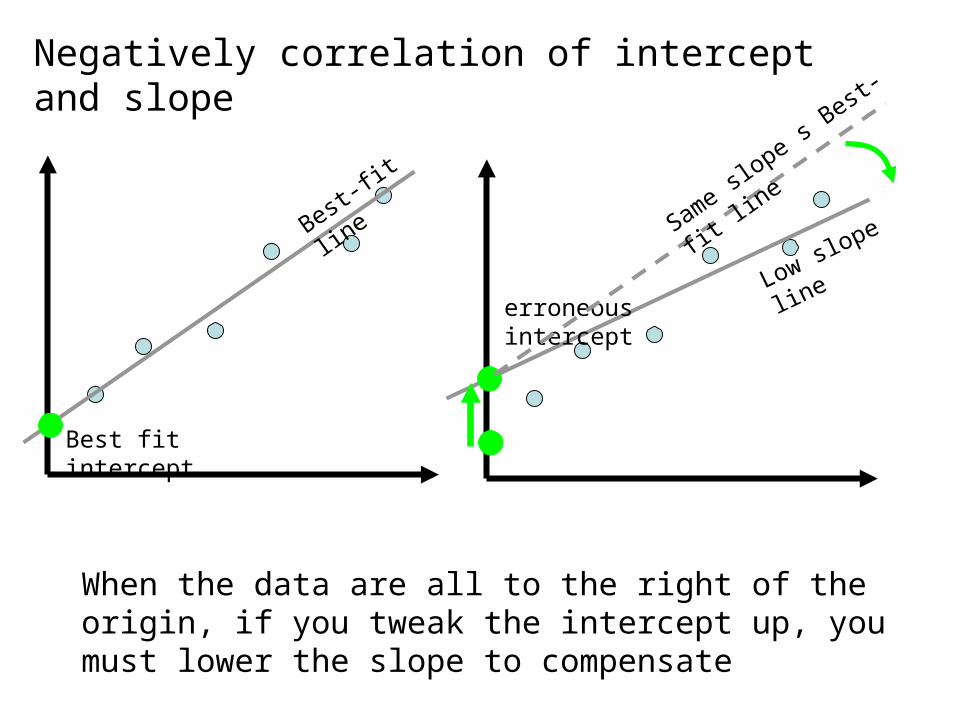
When the data are all to the right of the origin, if you tweak the intercept up, you must lower the slope to compensate
Same slope s
Best-fit
line
Negatively correlation of intercept and slope
Best-fit
line
Best fit intercept
erroneous intercept
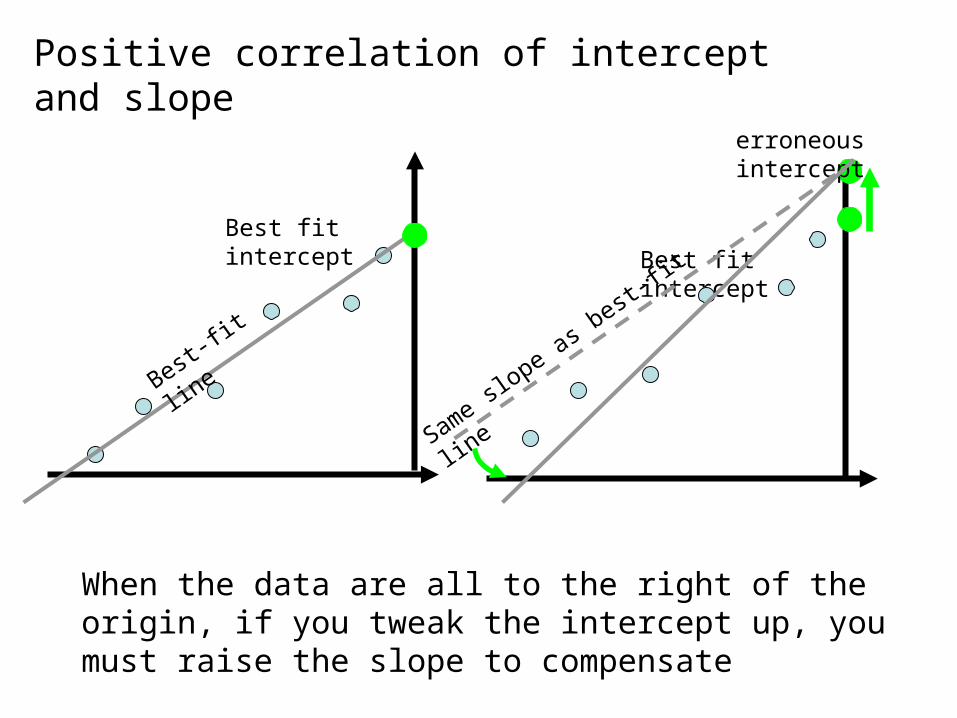
When the data are all to the right of the origin, if you tweak the intercept up, you must raise the slope to compensate
Same slope as b
est-fit
line
Positive correlation of intercept and slope
Best fit intercept

data near originpossibly good control on intercept
but lousy control on slope
-5 0 5
smal
l
big
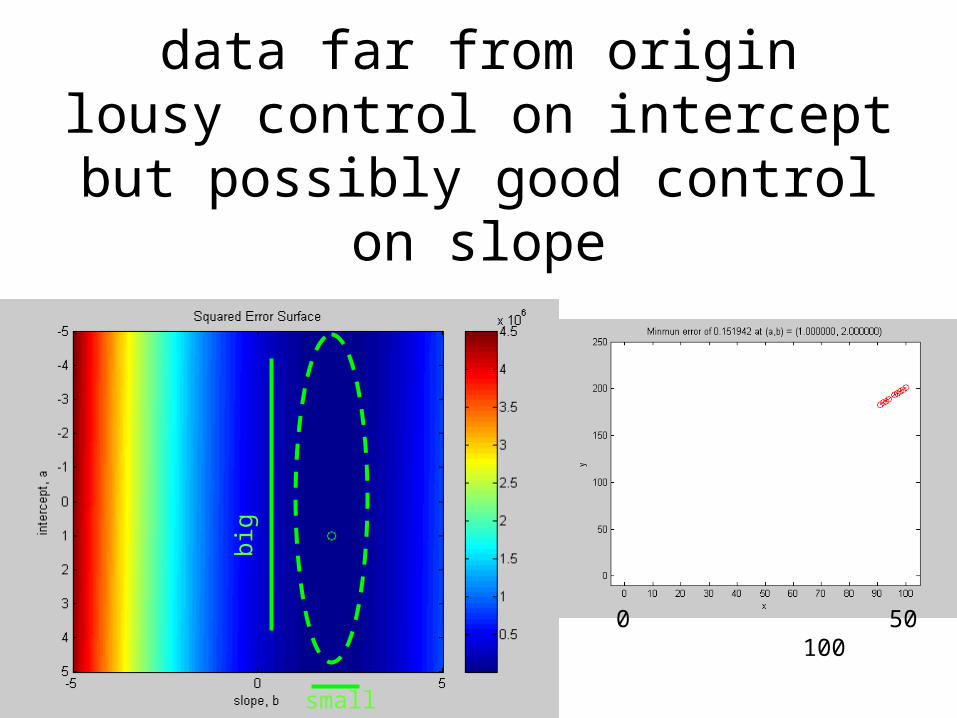
data far from originlousy control on intercept
but possibly good control on slope
small
big
0 50 100
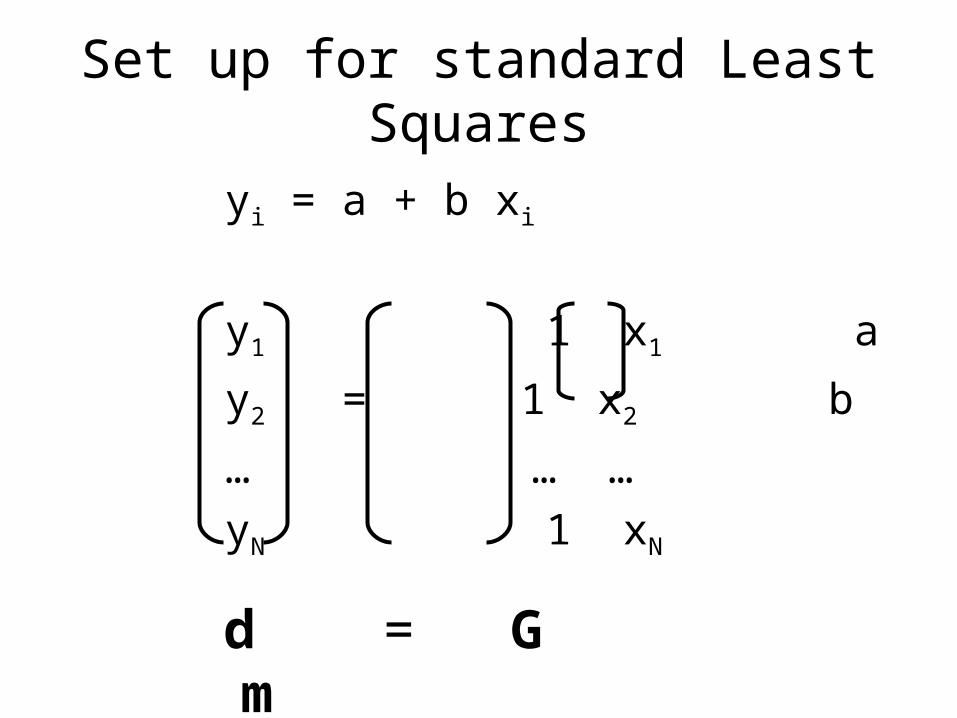
Set up for standard Least Squares
yi = a + b xi
y1 1 x1 a
y2 = 1 x2 b
… … …
yN 1 xN
d = G m

Standard Least-squares Solution
mest = [GTG]-1 GT d
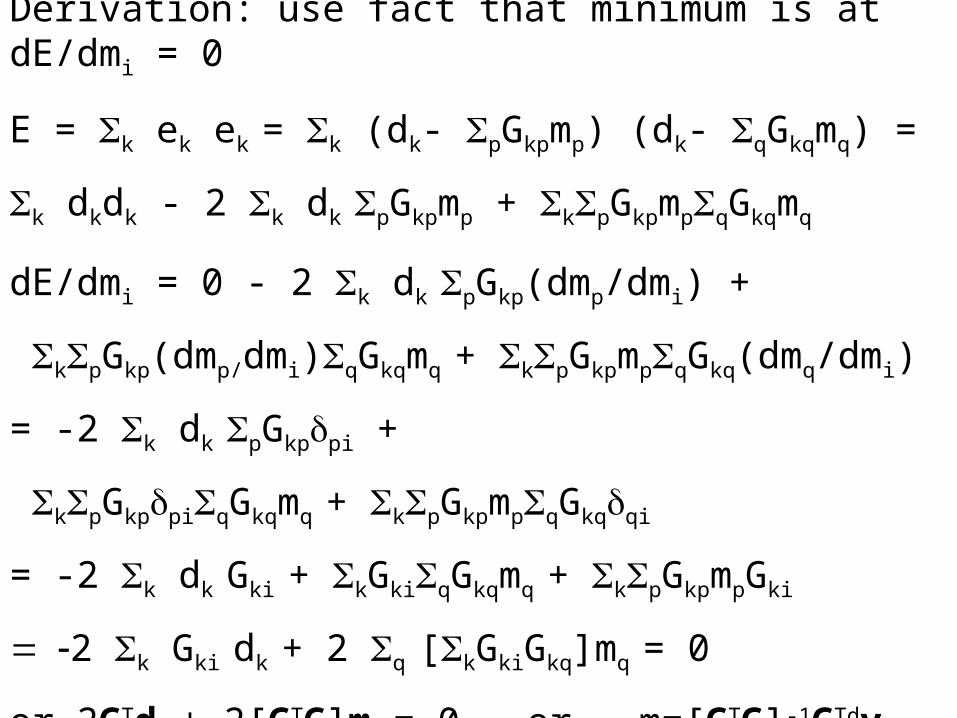
Derivation: use fact that minimum is at dE/dmi = 0
E = k ek ek = k (dk- pGkpmp) (dk- qGkqmq) =
k dkdk - 2 k dk pGkpmp + kpGkpmpqGkqmq
dE/dmi = 0 - 2 k dk pGkp(dmp/dmi) +
kpGkp(dmp/dmi)qGkqmq + kpGkpmpqGkq(dmq/dmi)
= -2 k dk pGkppi +
kpGkppiqGkqmq + kpGkpmpqGkqqi
= -2 k dk Gki + kGkiqGkqmq + kpGkpmpGki
2 k Gki dk + 2 q [kGkiGkq]mq = 0
or 2GTd + 2[GTG]m = 0 or m=[GTG]-1GTdy

Why least-squares?
Why not least-absolute length?
Or something else?

Least-Squares Least Absolute Value
a=1.00 b=2.02 a=0.94 b = 2.02





























