Embed Size (px)
Citation preview

Lecture 3:
Common Simple Dynamic Systems
1

Outline of the lesson.
• Common simple dynamic systems- First order -Second order - Dead time - (Non) Self-regulatory
2

When I complete this chapter, I want to be able to do the following.
• Predict output for typical inputs for common dynamic systems
3

3.1. First-Order Differential Equation Models
• The model can be rearranged as
• where τ is the time constant and K is the steady-state gain.• The Laplace transform is
)(01 tbuyadt
dya
)(tKuydt
dy
1)(
)(
)(
s
KsG
sU
sY
4

3.1.1. Step Response of a First-Order Model
• In the previous lecture, we have learned about the step response of first order systems.
5

3.1.2. Impulse Response of a First-Order Model
• Consider an impulse input, u(t) = δ (t), and U(s) = 1; the output is now
• The time-domain solution is
• which implies that the output rises instantaneously to some value at t = 0 and then decays exponentially to zero.
1)(
s
KsY
/)( te
Kty
6

3.1.3. Integrating Process
• When the coefficient a0 = 0 in the first order
differential equation , we get
where K = (b / a1). Here, the pole of the transfer function G(s) is at the origin, s = 0.
)(01 tbuyadt
dya
,)()(
)()(
)(
)(
1
1
s
KsG
sU
sYtKu
tua
b
dt
dy
tbudt
dya
7

3.1.3. Integrating Process
• The solution of the Equation , could be written
immediately without any transform as
• This is called an integrating (also capacitive or non-self-regulating) process. We can associate the name with charging a capacitor or filling up a tank.
dttuKtyt
0
)()(
)(tKudt
dy
8

SIMPLE PROCESS SYSTEMS: INTEGRATOR
pump valve
Level sensorLevel sensor
Liquid-filled tank
Plants have many inventories whose flows in and out do not depend on the inventory (when we apply no control
or manual correction).
These systems are often termed “pure integrators” because they integrate the difference between in and out
flows.
outin F F dt
dLA
dt
dV
)()(
)()(
LftF
LftF
out
in
9

SIMPLE PROCESS SYSTEMS: INTEGRATOR
pump valve
Level sensorLevel sensor
Liquid-filled tank
outin FFdt
dLA
dt
dV
Fout
Fin
Plot the level for this scenario
time 10

SIMPLE PROCESS SYSTEMS: INTEGRATOR
pump valve
Level sensorLevel sensor
Liquid-filled tank
outin FFdt
dLA
dt
dV
Fout
Fin
time
Level
11

SIMPLE PROCESS SYSTEMS: INTEGRATOR
pump valve
Level sensorLevel sensor
Liquid-filled tank
• Non-self-regulatory variables tend to “drift” far from
desired values.
• We must control these variables.
Let’s look aheadto when we
apply control.
12

3.2. Second-Order Differential Equation Models
• We have not encountered examples with a second-order equation, especially one that exhibits oscillatory behavior.
• One reason is that processing equipment tends to be self-regulating.
• An oscillatory behavior is most often the result of implementing a controller.
• For now, this section provides several important definitions.
13

3.2. Second-Order Transfer Function Models
• where ωn is the natural (undamped) frequency, ζ is the damping ratio or coefficient, K is the steady-state gain, and τ is the natural period of oscillation, where τ = 1/ωn.
• The characteristic equation is
• Which provides the poles
122)(
)()(
2222
2
ss
K
ss
K
sU
sYsG
nn
n
,02 22 nnss
.122,1 nnp
14

SIMPLE PROCESS SYSTEMS: 2nd ORDER
0 10 20 30 40 50 60 70 800
0.2
0.4
0.6
0.8
1
Time
Co
ntro
lled
Var
iab
le
0 10 20 30 40 50 60 70 800
0.2
0.4
0.6
0.8
1
Time
Man
ipu
late
d V
aria
ble
0 20 40 60 80 100 120 140 160 180 2000
0.5
1
1.5
Time
Co
ntro
lled
Var
iab
le
0 20 40 60 80 100 120 140 160 180 2000
0.2
0.4
0.6
0.8
1
Time
Man
ipu
late
d V
aria
ble
overdamped underdamped
15

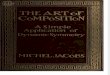
WORKSHOP
Four systems experienced an impulse input at t=2. Explain what you can learn about each system (dynamic model) from the figures below.
0 5 10 15 20 25 300
1
2
3
outp
ut
(a)
0 5 10 15 20 25 30-1
0
1
2
3
outp
ut
(b)
0 5 10 15 20 25 30-1
0
1
2
3
time
outp
ut
(c)
0 5 10 15 20 25 300
0.5
1
1.5
2
2.5
time
outp
ut
(d)
16

3.4 Processes with dead time
• Many chemical processes involve a time delay between the input and the output.
• This delay may be due to the time required for a slow chemical sensor to respond or for a fluid to travel down a pipe.
• A time delay is also called dead time or transport lag.
• In controller design, the measured output will not contain the most current information, and hence systems with dead time can be difficult to control.
17

Let’s consider plug flow through a pipe. Plug flow has no backmixing; we can think of this a a hockey puck traveling in a pipe.
What is the dynamic response of the outlet fluid property (e.g., concentration) to a step change in the inlet fluid property?
Let’s learn a newdynamic response
& its LaplaceTransform
18

THE FIRST STEP: LAPLACE TRANSFORM
time
Xin
Xout
= dead time
What is the value ofdead time for
plug flow?
19

0 1 2 3 4 5 6 7 8 9 10-0.5
0
0.5
1
time
Y, o
utle
t fro
m d
ead
time
0 1 2 3 4 5 6 7 8 9 10-0.5
0
0.5
1
time
X, i
nlet
to d
ead
time
THE FIRST STEP: LAPLACE TRANSFORM
• Is this a dead time?
•What is thevalue?
20

THE FIRST STEP: LAPLACE TRANSFORM
The dynamic model for dead time is
)()( tUtY
The Laplace transform for a variable after dead time is
)()( sUesY s
Our plants have pipes. We willuse this a lot!
21

• There several methods to approximate the dead time as a ratio of two polynomials in s.
• On such method is the first-order Pade approximation.
Pade approximation of the time delay
22
.
21
21
s
se s

Example 3.2
Use the first-order Pade approximation to plot the unit-step response of the first order with a dead-time function:
Making use of the dirst order Pade approximation, we can construct a plot with the approximation
23
110)(
)( 3
s
e
sU
sY s
.)5.11)(110(
5.11
)(
)(
ss
s
sU
sY

Matlab code
th = 3;
P1 = tf([-th/2 1],[th/2 1]); % First-order Padé approximation
t = 0:0.5:50;
taup = 10;
G1 = tf(1,[taup 1]);
y1 = step(G1*P1,t); % y1 is first order with Padé approximation of
% dead time
y2 = step(G1,t);
t2 = t+th; % Shift the time axis for the actual time-delay function
plot(t,y1,t2,y2,’r’);
24

The approximation is very good except near t = 0, where the approximate response dips below. This behavior has to do with the first-order Pade approximation, and we can improve the result with a second-order Pade approximation.
25