Embed Size (px)
Citation preview

Lecture 22
Adjunct Methods
Part 1
Motivation
Motivating scenario
We want to predict tomorrow’s weather, u(t) …
We have a atmospheric model chugging away to predict temperature, pressure, etc.
This model depends on a forcing f(t), for example, sea surface temperature, which we known only imperfectly
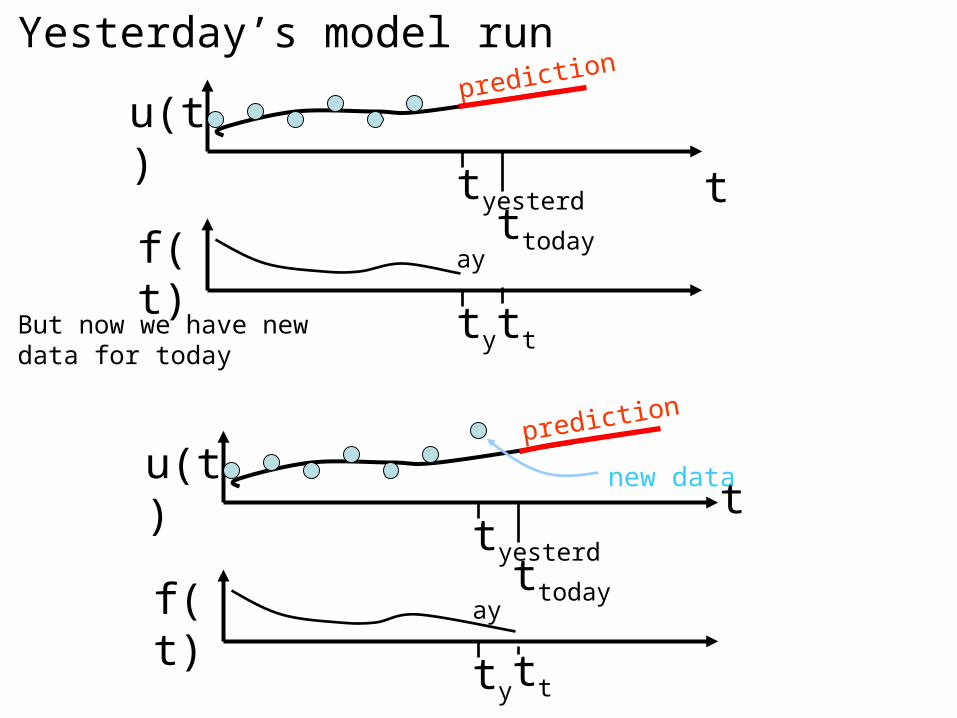
Yesterday’s model run
t
u(t)
tyesterday
f(t)
ty
prediction
ttoday
But now we have newdata for today
tu(t)
tyesterday
f(t)
ty
prediction
ttoday
tt
tt
new data
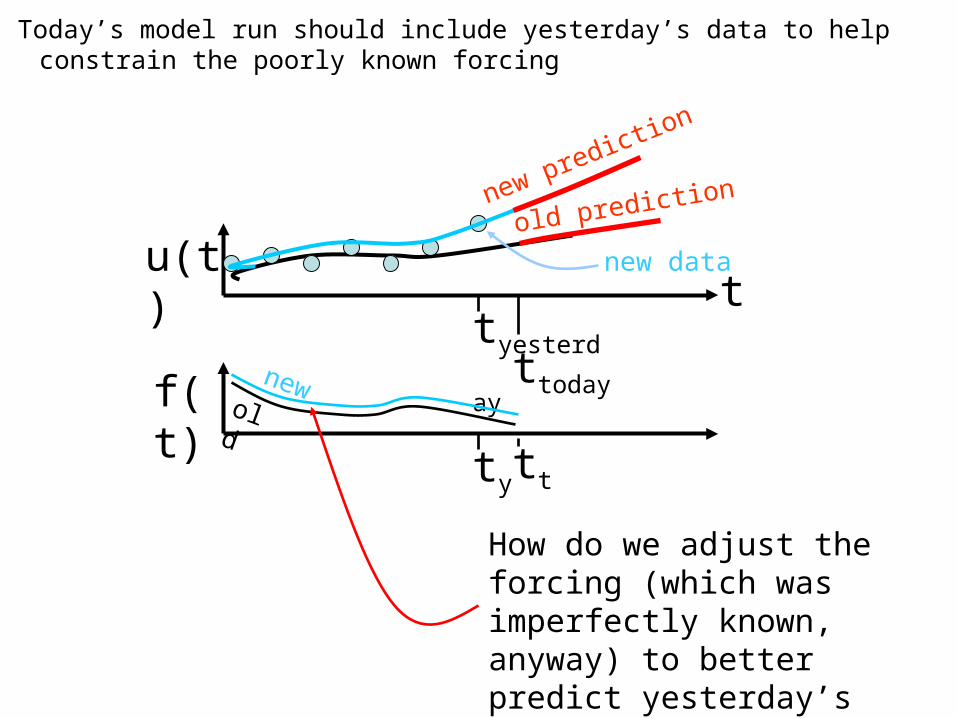
Today’s model run should include yesterday’s data to help constrain the poorly known forcing
tu(t)
tyesterday
f(t)
ty
old prediction
ttoday
tt
new data
How do we adjust the forcing (which was imperfectly known, anyway) to better predict yesterday’s weather?
new prediction
old
new
Part 2
The mathematics of
continuous functions
inner products
linear operators
and their
adjoints

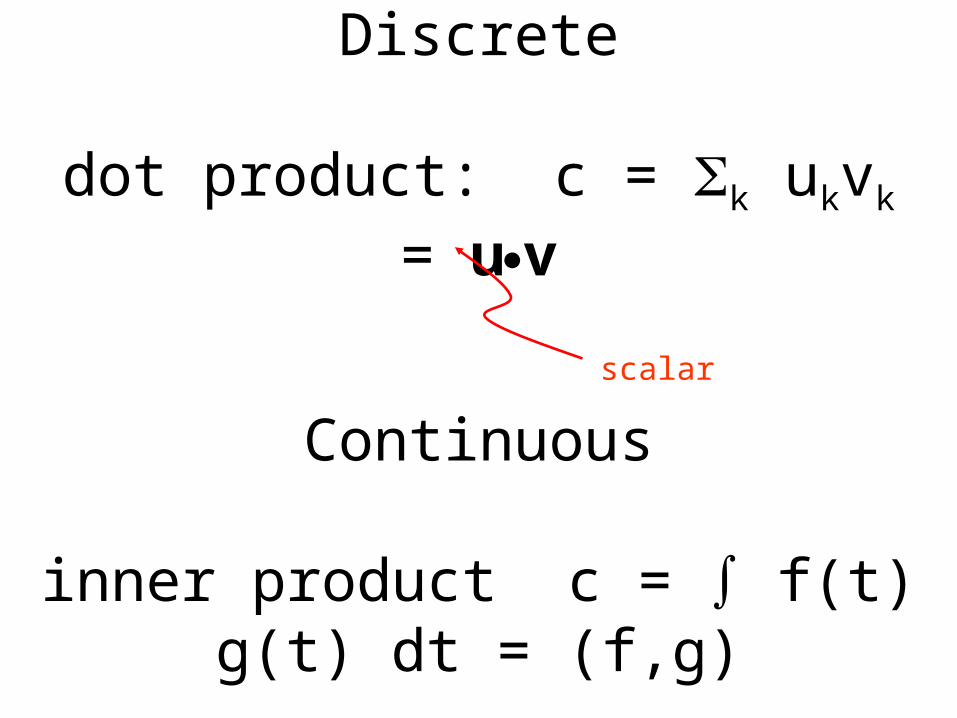
Discrete
vectors uk and vk
Continuous
functions f(t) and g(t)

functions f(t) and g(t)
Discrete approximation as a vectors
uk=f(kt) and vk=g(kt)
Discrete
dot product: c = k ukvk = uv
Continuous
inner product c = f(t) g(t) dt = (f,g)
scalar

discrete approximation as dot product
(f,g) = f(t) g(t) dt = t k ukvk = t uv
with uk=f(kt) and vk=g(kt)
inner product (f,g)
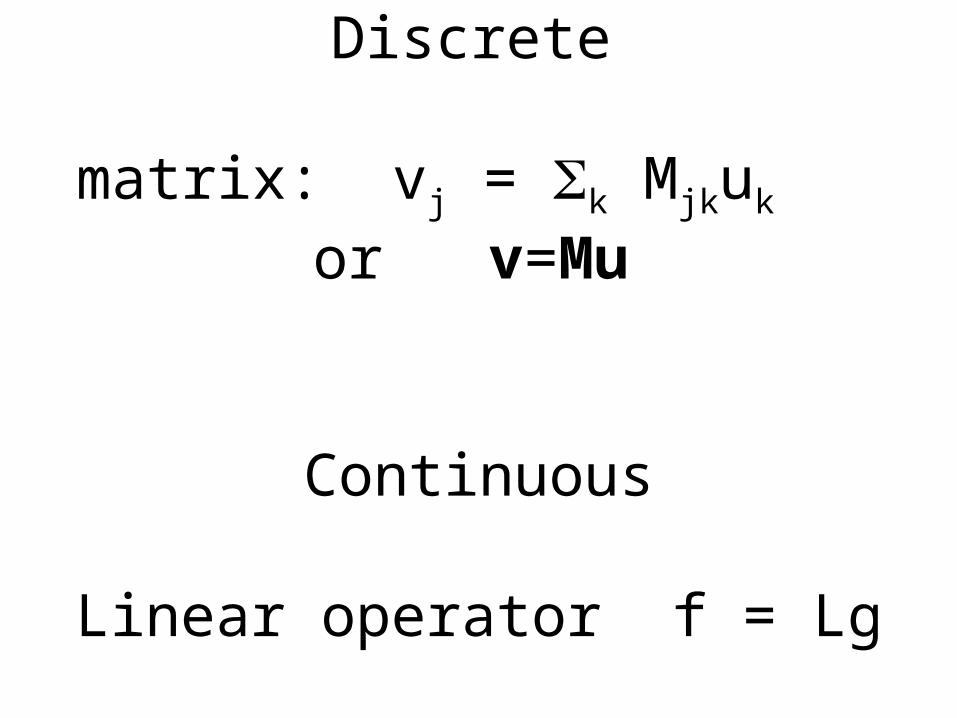
Discrete
matrix: vj = k Mjkuk or v=Mu
Continuous
Linear operator f = Lg
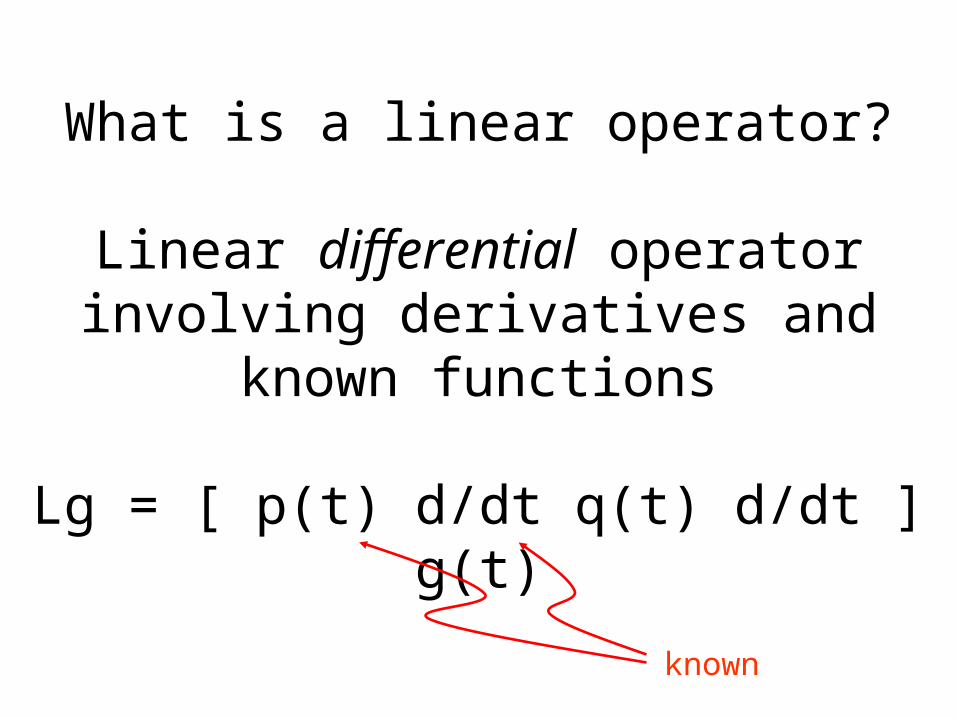
What is a linear operator?
Linear differential operatorinvolving derivatives and known functions
Lg = [ p(t) d/dt q(t) d/dt ] g(t)
known

and/or
Linear integral operatorinvolving intergral and known functions
Lg = p(t,t’) g(t’) dt’
known
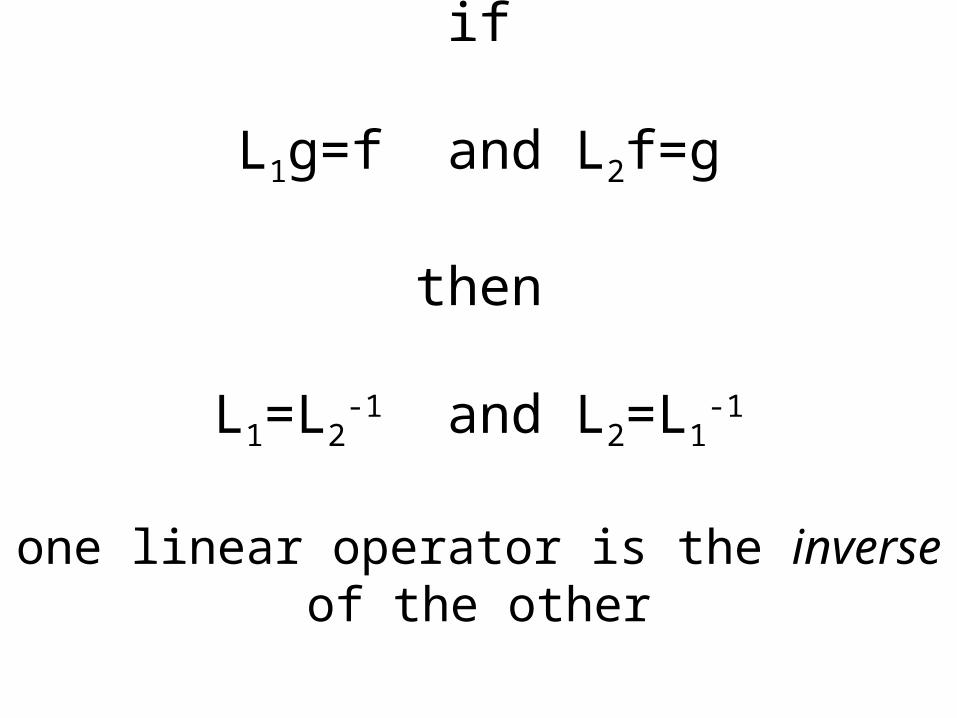
if
L1g=f and L2f=g
then
L1=L2-1 and L2=L1
-1
one linear operator is the inverse of the other

discrete approximations
1 0 0 0 … 0
-1 1 0 0 … 0
0 -1 1 0 … 0
……
… 0 0 -1 1
Lg=f with L = d/dtplus b.c. g(0)=known
Lg=f with Lg = 0
tg(t’)dt’
plus b.b. g(0)=known
Mu=v, M = t-1
1 0 0 0 … 0
1 1 0 0 … 0
1 1 1 0 … 0
……
… 1 1 1 1
Mu=v, M = t
Sample differential operator plus b.c.
Sample integral operator plus b.c.

Question concerning a dot product …
given two matrices A and B
when is (Au)v = u(Bv) ?
Answer: when B=AT, since
(Au)v = (Au)Tv = uTATv = uT(ATv) = u (ATv)

Question concerning an inner product …
given two linear operators L1 and L2
when is ( L1f , g ) = ( f, L2g ) ?
Answer: never mind, but let’s give it a name
(L1f, g) = (f, L2g) when L1 is the adjoint of L2
let’s denote the adjoint relationship L2=L1*
means “adjoint”
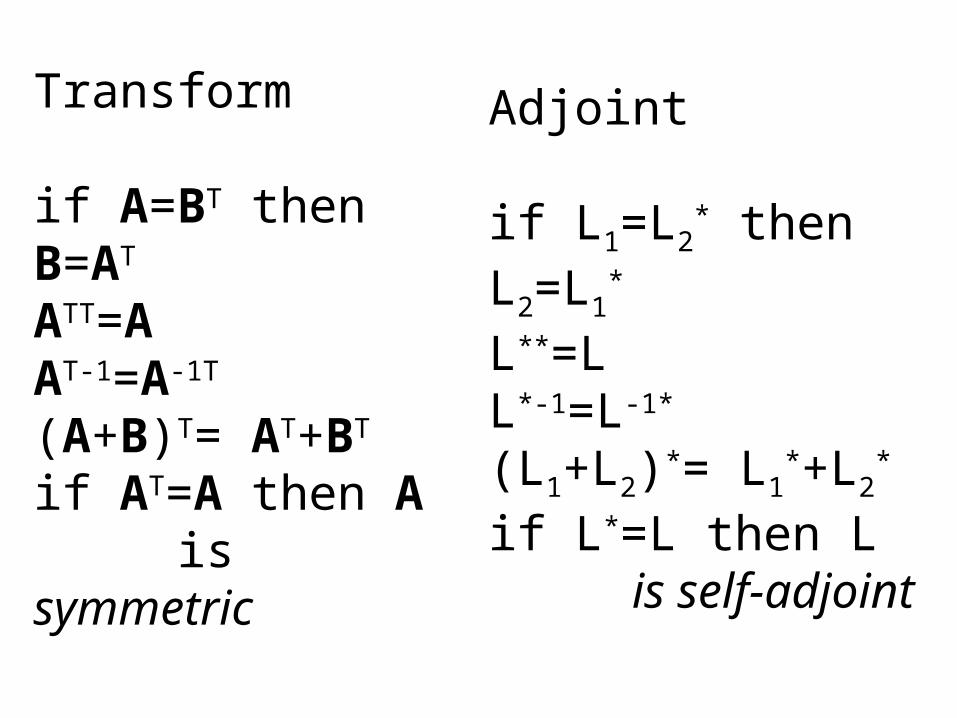
Transform
if A=BT then B=AT
ATT=AAT-1=A-1T
(A+B)T= AT+BT
if AT=A then A is symmetric
Adjoint
if L1=L2* then L2=L1
*
L**=LL*-1=L-1*
(L1+L2)*= L1*+L2
*
if L*=L then L is self-adjoint

Calculating adjoints by integration by parts
Let L = d/dtwith b.c. zero at ±
(Lf, g) = -+
df/dt g dt
= f g |-+
- -+
f dg/dt dt = - -+
f dg/dt dt
= (f, L*g)
So L* = -d/dtwith b.c. zero at ±
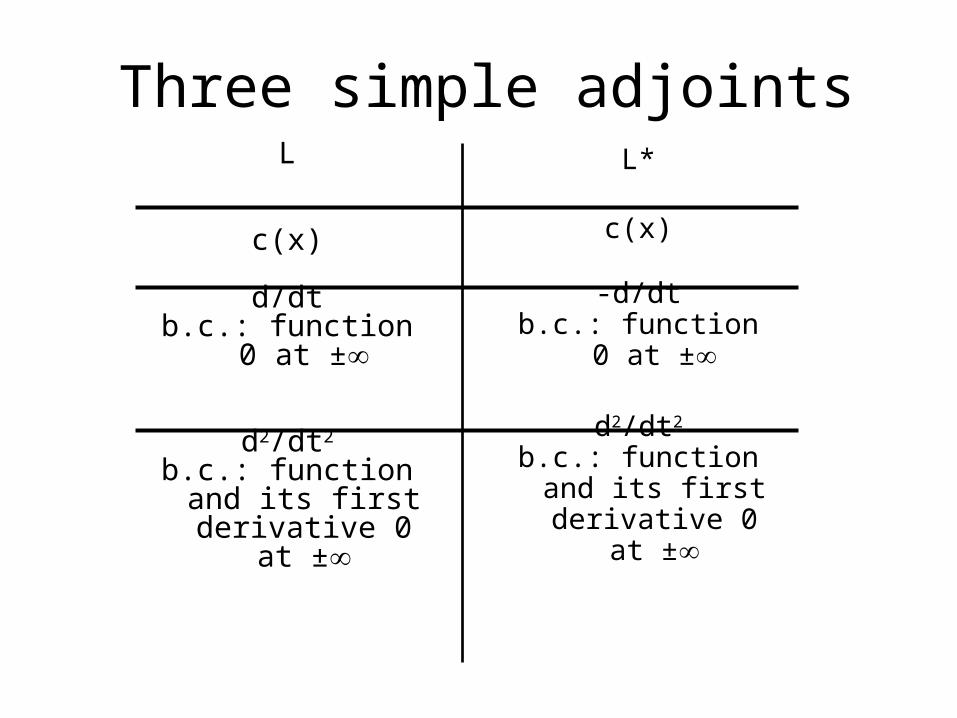
Three simple adjointsL
c(x)
d/dtb.c.: function 0 at
±
d2/dt2
b.c.: function and its first derivative 0
at ±
L*
c(x)
-d/dtb.c.: function 0 at
±
d2/dt2
b.c.: function and its first derivative 0
at ±

Part 3
Functional derivatives
How to represent
the idea that a perturbation in forcing, f(t)
cause a perturbation in response, u(t)
Here’s the differential equation
L u(t) = f(t)
forcing
Data di linearly depends on u(t)through an inner product
di = (hi, u)
Differential Equation Lu=f
A perturbation in f(t) causes a perturbation in u(t)
f0(t) f0(t)+f(t)
u0(t) u0(t)+u(t)
Suppose f(t) was localized at time t0: f(t)=(t-t0)
Then u(t) is a function of and t0: u(t,,t0)
Then the function (or Fréchet) derivative is:
u(t)/f(t0) = lim0 [ u(t,,t0) – u(t,,t0) ] /
An impulsive perturbation in forcing(t-t0)
Causes a perturbation in response u(t,,t0)
Then the general perturbation f in forcingcauses the response
u = (u/f) f dt0 = ( u/f, f )

t(t-t0)
t0
u
t0
An impulsive perturbation in forcing
Causes this response
tf
t0
u
t0
A more complicated perturbation in forcing
Causes this response
definesu/a
u =u/a, a)
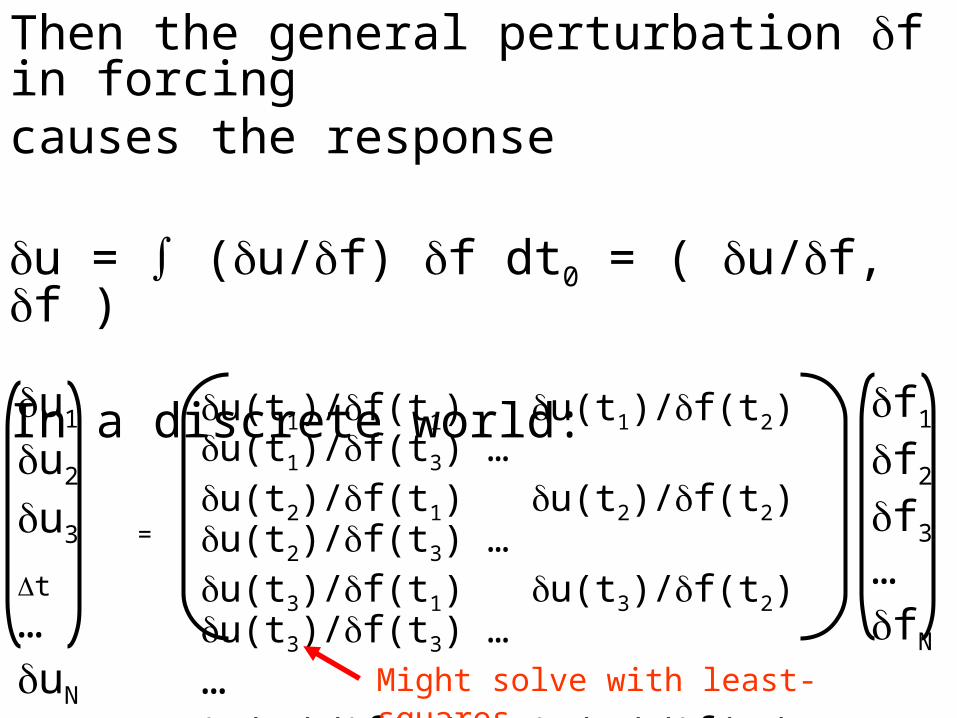
Then the general perturbation f in forcingcauses the response
u = (u/f) f dt0 = ( u/f, f )
In a discrete world:
u1
u2
u3 = t
…uN
u(t1)/f(t1) u(t1)/f(t2) u(t1)/f(t3) …u(t2)/f(t1) u(t2)/f(t2) u(t2)/f(t3) …u(t3)/f(t1) u(t3)/f(t2) u(t3)/f(t3) ……u(tN)/f(t1) u(tN)/f(t2) u(tN)/f(t3) …
f1
f2
f3
…fN
Might solve with least-squares …
Part 4
Calculating the data kernel
The functional derivative of
data
with respect to forcing

The Goal
to find the data kernel, gi(t)
which relates a perturbation in the data, di, to a perturbation in the forcing f(t)
through an inner product
di = ( gi(t), f(t) )
Note that since the data kernel satisfies
it is a functional derivative
gi(t) = di / f(t)
di = ( gi(t), f(t) )
Step 1:
assume that a function u(t) solves a linear differential equation with forcing f(t)
L u(t) = f(t)
Step 2:
assume the differential equation has green function F(t,t’)
so the solution can be written:
note that L-1 is the inverse of L, since
f=Lu and u=L-1f
u(t) = F(t,t’) f(t’) dt = (F(t,t’), f(t) ) L-1 f(t)

Step 3:
assume that the data, di, are related to the solution u(t) through an inner product
di = ( hi(t), u(t) )

Step 4:
do some substitutions and manipulations
di = ( hi(t), u(t) )
= ( hi(t), L-1f(t) )
= (L-1*hi(t), f(t) )
= (L*-1hi(t), f(t) )

Step 4:since the problem is linear, this rule applies to perturbations of functions as well as to
the functions themselves
di = (L*-1hi(t), f(t) )
So
di = (L*-1hi(t), f(t) )
Step 5:by comparing the definition of the data kernel
di = ( gi(t), f(t) )
to the result
di = (L*-1hi(t), f(t) )
recognize that the data kernel is gi(t) = L*-1hi(t)

Step 6:
since the data kernel satisfies
gi(t) = L*-1hi(t)
then it must satisfy the differential equation
L*gi(t) = hi(t)
This is the desired results
a way of calculating the data kernel, gi(t)
by solving the differential equation
L*gi(t) = hi(t)
Part 5
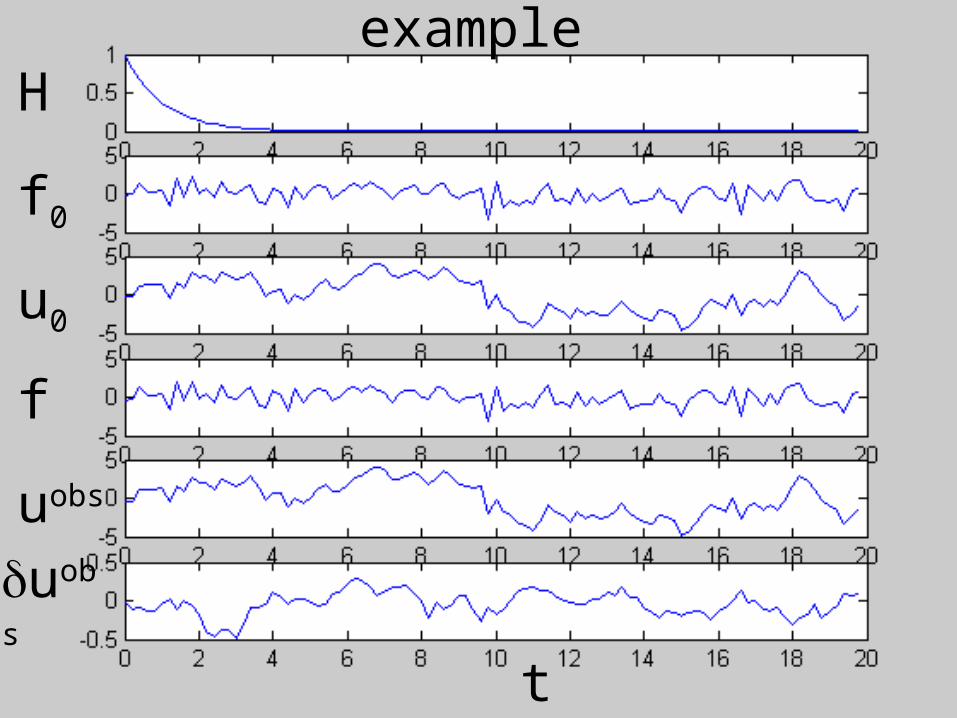
An example
Note: In this example I use very simple differential equations that can be solved analytically.
In a reality, you would be using much more complicated differential equations that but be solved numerically ..
Example: Newtonian cooling equation
du/dt + cu = f(t)
L = d/dt + c
u(t) is temperaturef(t) is heatingc is a constant
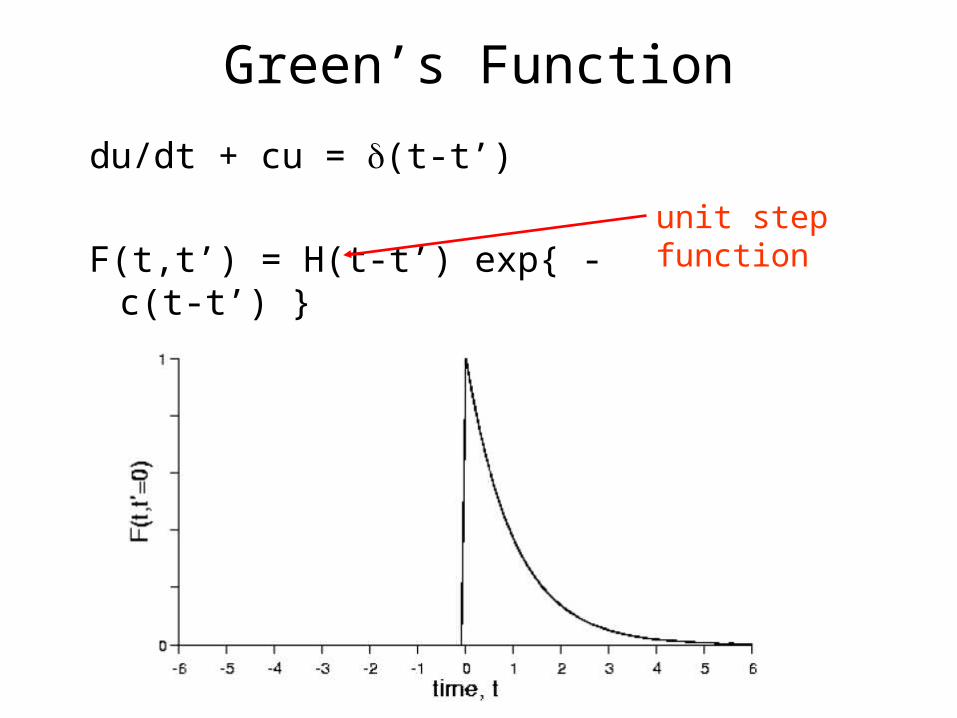
Green’s Function
du/dt + cu = (t-t’)
F(t,t’) = H(t-t’) exp{ -c(t-t’) }
unit step function
Adjoint differential equationL = d/dt + c
The adjoint of d/dt is –d/dtand the adjoint of c is c
So L* = -d/dt + c
And so du/dt + cu = f(t)
has corresponding adjoint equation
-dgi/dt + cgi = hi
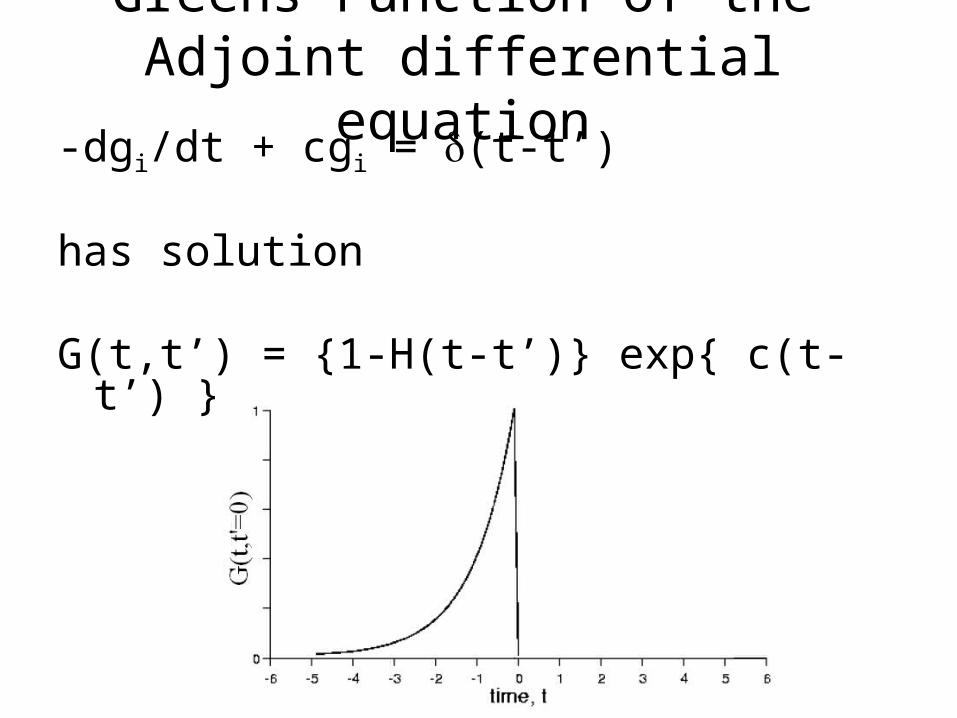
Greens Function of the Adjoint differential equation
-dgi/dt + cgi = (t-t’)
has solution
G(t,t’) = {1-H(t-t’)} exp{ c(t-t’) }
interpretationSuppose hi = (t)
so that the data di is just u(t=0), temperature at time 0 Then G(t,t’=0) is the data kernel gi(t)
Now suppose that we make an impulsive perturbation of heating at time t0: f(t)=(t-t0)
Then di = u(t=0)
= ( gi(t), f(t) )
= (G(t,t’=0) , (t-t0) )
= G(t0,t’=0)
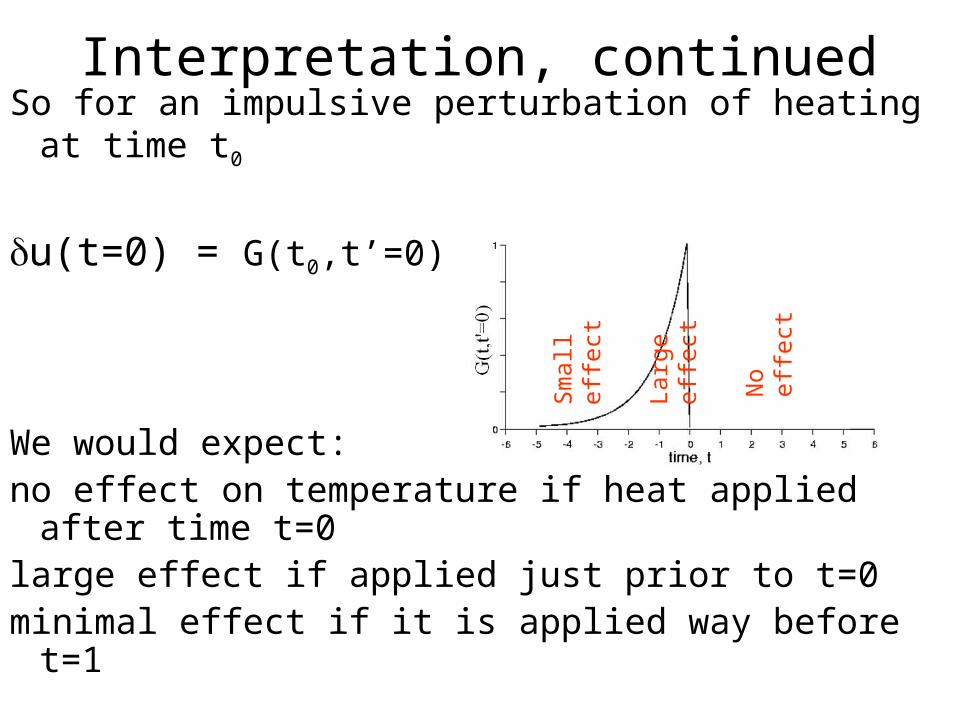
Interpretation, continuedSo for an impulsive perturbation of heating at time t0
u(t=0) = G(t0,t’=0)
We would expect:no effect on temperature if heat applied after time
t=0large effect if applied just prior to t=0minimal effect if it is applied way before t=1
No
effe
ct
Larg
e ef
fect
Sm
all e
ffec
t
exampleH
f0
u0
f
uobs
uobs
t
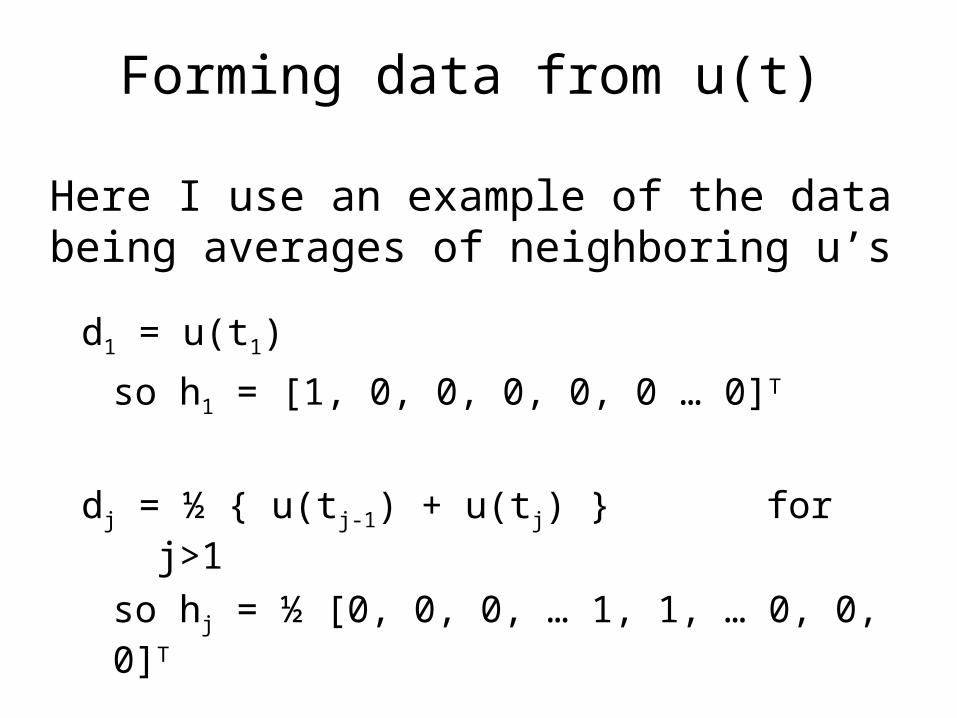
Forming data from u(t)
Here I use an example of the data being averages of neighboring u’s
d1 = u(t1)
so h1 = [1, 0, 0, 0, 0, 0 … 0]T
dj = ½ { u(tj-1) + u(tj) } for j>1
so hj = ½ [0, 0, 0, … 1, 1, … 0, 0, 0]T
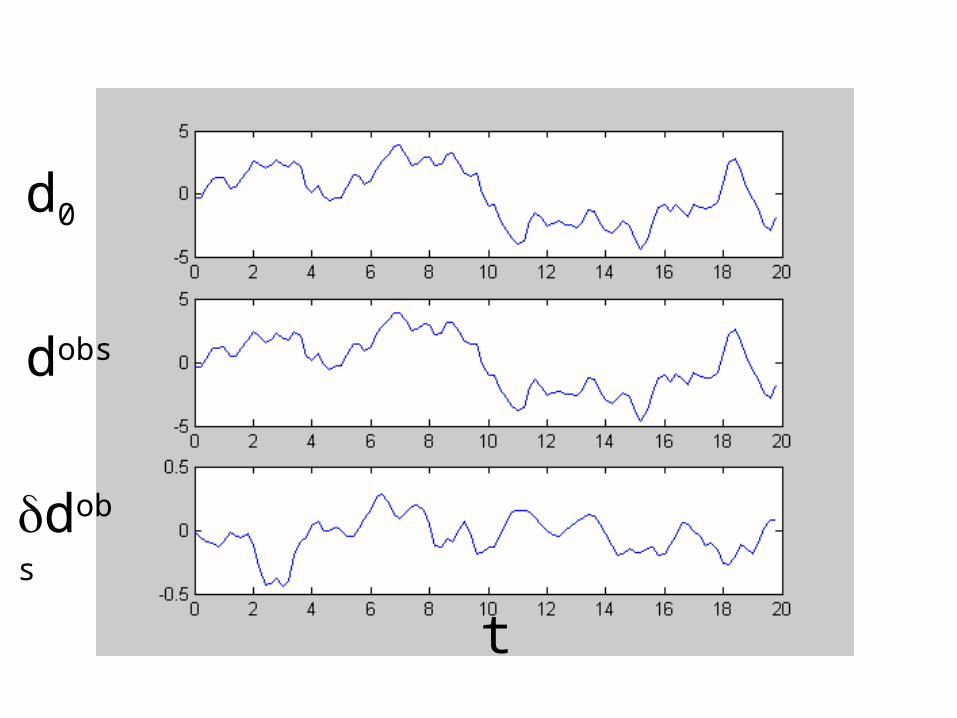
d0
dobs
t
dobs
The problem
Reconstruct f from d
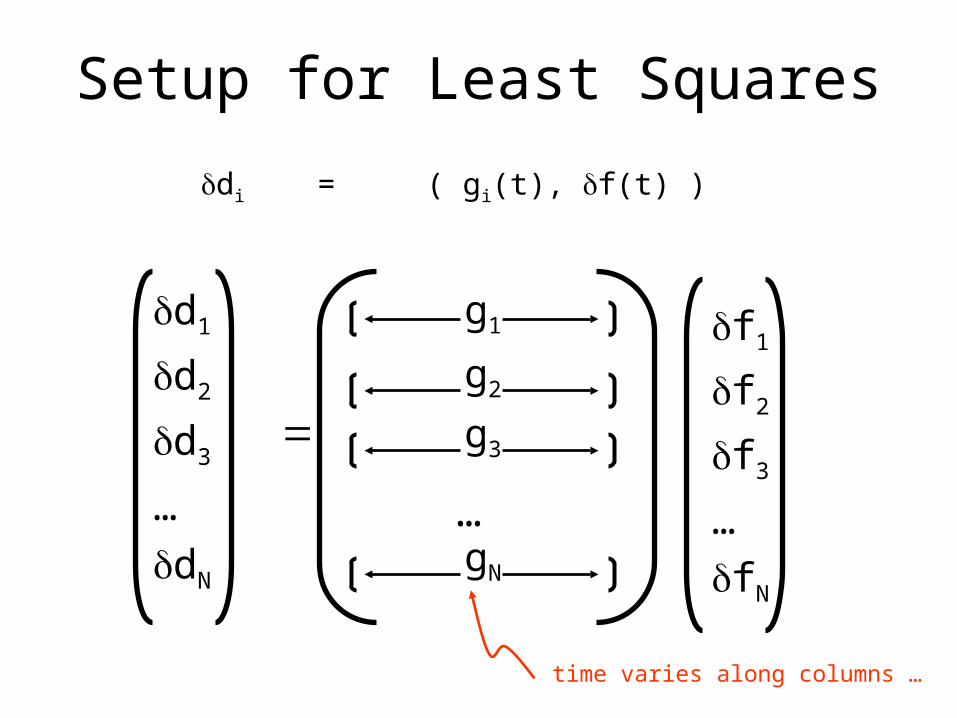
Setup for Least Squares
di = ( gi(t), f(t) )
f1
f2
f3
…
fN
d1
d2
d3
…
dN
g1
g2
g3
gN
…
time varies along columns …
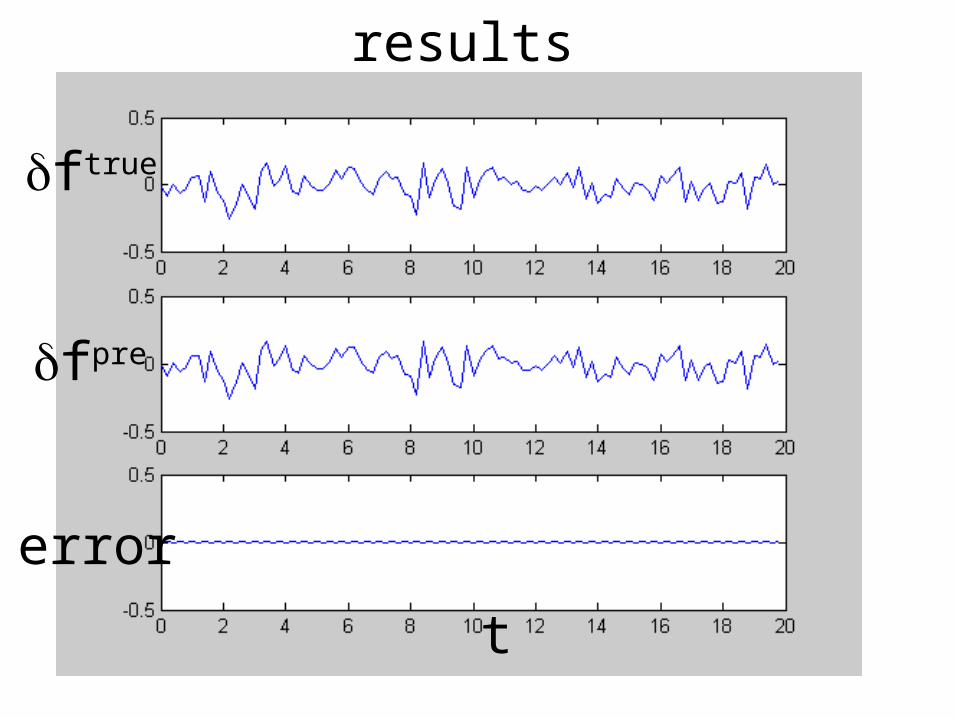
ftrue
error
t
fpre
results
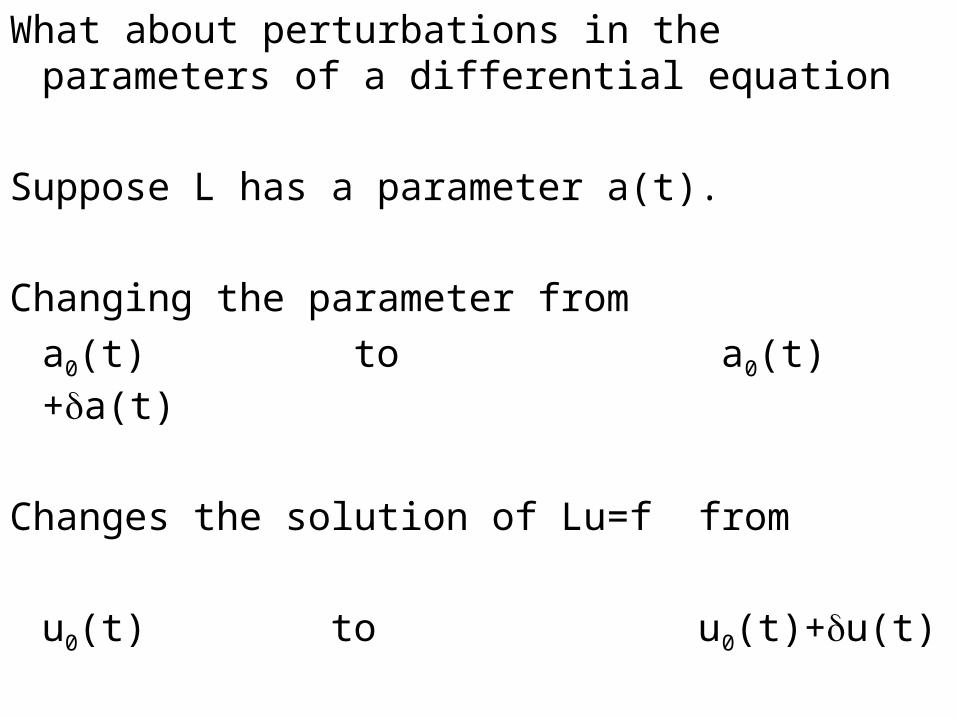
What about perturbations in the parameters of a differential equation
Suppose L has a parameter a(t).
Changing the parameter from
a0(t) to a0(t)+a(t)
Changes the solution of Lu=f from
u0(t) to u0(t)+u(t)
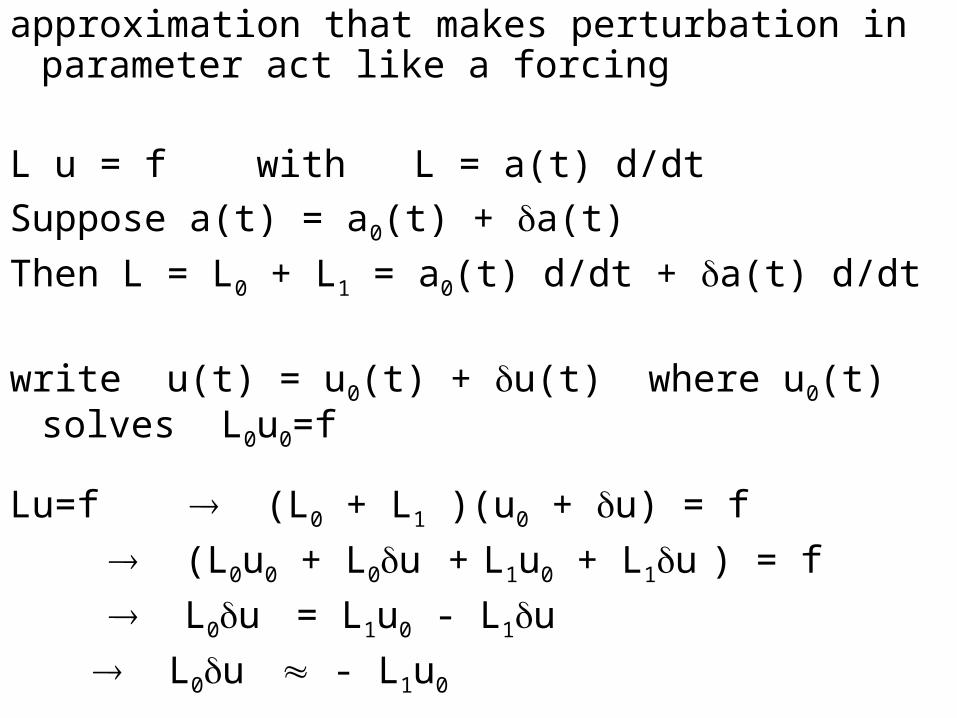
approximation that makes perturbation in parameter act like a forcing
L u = f with L = a(t) d/dt
Suppose a(t) = a0(t) + a(t)
Then L = L0 + L1 = a0(t) d/dt + a(t) d/dt
write u(t) = u0(t) + u(t) where u0(t) solves L0u0=f
Lu=f (L0 + L1 )(u0 + u) = f
(L0u0 + L0u + L1u0 + L1u ) = f
L0u = L1u0 - L1u
L0u - L1u0
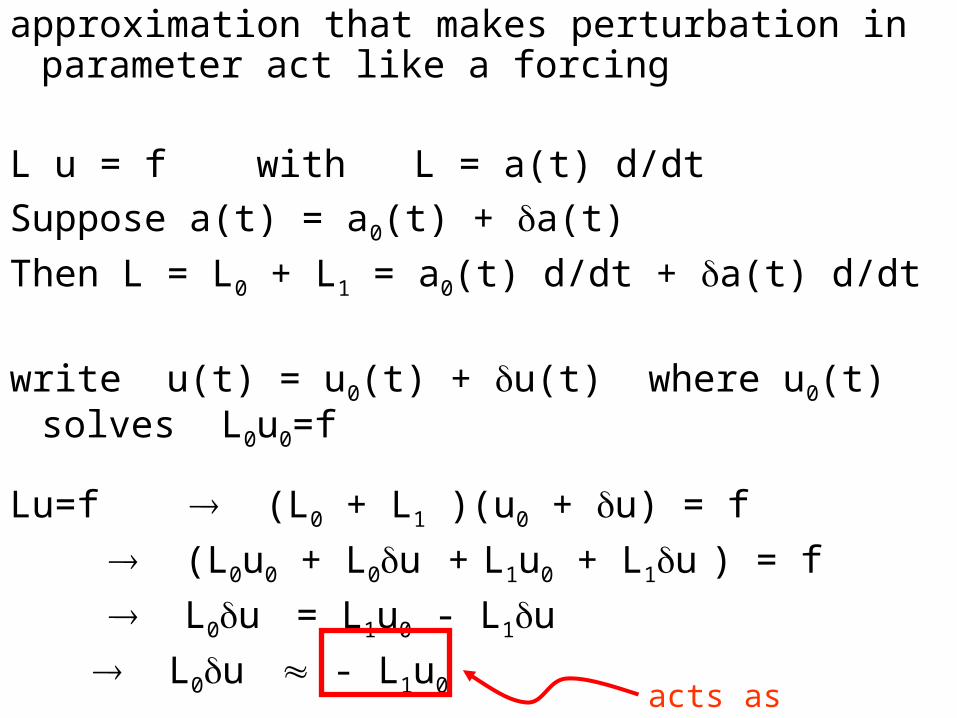
approximation that makes perturbation in parameter act like a forcing
L u = f with L = a(t) d/dt
Suppose a(t) = a0(t) + a(t)
Then L = L0 + L1 = a0(t) d/dt + a(t) d/dt
write u(t) = u0(t) + u(t) where u0(t) solves L0u0=f
Lu=f (L0 + L1 )(u0 + u) = f
(L0u0 + L0u + L1u0 + L1u ) = f
L0u = L1u0 - L1u
L0u - L1u0 acts as forcing