-
7/30/2019 Lecture 04 OCLS
1/48
Lecture 4: Well-Posedness and Internal Stability
Well-Posedness of Feedback Systems
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 1/17
-
7/30/2019 Lecture 04 OCLS
2/48
Lecture 4: Well-Posedness and Internal Stability
Well-Posedness of Feedback Systems
Internal Stability of Feedback Systems
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 1/17
-
7/30/2019 Lecture 04 OCLS
3/48
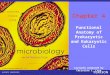
One Degree of Freedom Feedback Control System
K and P represent the controller and the plant,
r and y are the reference and the output,
up and yp the input and output of the plant,
di and d the input and output disturbances,
n is the measurement noise.
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 2/17
-
7/30/2019 Lecture 04 OCLS
4/48
Example of a not realizable system
Suppose that
P(s) = s 1
s + 2, K(s) = 1
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 3/17
-
7/30/2019 Lecture 04 OCLS
5/48
Example of a not realizable system
Suppose that
P(s) = s 1
s + 2, K(s) = 1
y = P(s)up + d, up = u + di
u = K(s) r n y
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 3/17
-
7/30/2019 Lecture 04 OCLS
6/48
Example of a not realizable system
Suppose that
P(s) = s 1
s + 2, K(s) = 1
y = P(s)
u + di
+ d
u = K(s) r n y
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 3/17
-
7/30/2019 Lecture 04 OCLS
7/48
Example of a not realizable system
Suppose that
P(s) = s 1
s + 2, K(s) = 1
y = P(s)
u + di
+ d
u = K(s) r n yu = K(s)
r n
P(s)
u + di
+ d
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 3/17
-
7/30/2019 Lecture 04 OCLS
8/48
Example of a not realizable system
Suppose that
P(s) = s 1
s + 2, K(s) = 1
y = P(s)
u + di
+ d
u = K(s) r n yu = r n
P(s)
u + di
+ d
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 3/17
-
7/30/2019 Lecture 04 OCLS
9/48
Example of a not realizable system
Suppose that
P(s) = s 1
s + 2, K(s) = 1
y = P(s)
u + di
+ d
u = K(s) r n yu + P(s)u = r n P(s)di d
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 3/17
-
7/30/2019 Lecture 04 OCLS
10/48
Example of a not realizable system
Suppose that
P(s) = s 1
s + 2, K(s) = 1
y = P(s)
u + di
+ d
u = K(s) r n yu =
1 + P(s)
1
[r n P(s)di d]
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 3/17
-
7/30/2019 Lecture 04 OCLS
11/48
Example of a not realizable system
Suppose that
P(s) = s 1
s + 2, K(s) = 1
y = P(s)
u + di
+ d
u = K(s) r n yu =
1 + P(s)
1
[r n P(s)di d]
u =
1
s 1
s + 2
1
r n +
s 1
s + 2di d
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 3/17
-
7/30/2019 Lecture 04 OCLS
12/48
Example of a not realizable system
Suppose that
P(s) = s 1
s + 2, K(s) = 1
y = P(s)
u + di
+ d
u = K(s) r n yu =
1 + P(s)
1
[r n P(s)di d]
u =
s + 2 (s 1)
s + 2
1
r n +
s 1
s + 2di d
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 3/17
-
7/30/2019 Lecture 04 OCLS
13/48
Example of a not realizable system
Suppose that
P(s) = s 1
s + 2, K(s) = 1
y = P(s)
u + di
+ d
u = K(s) r n yu =
1 + P(s)
1
[r n P(s)di d]
u =
s + 2 (s 1)
s + 2
1
r n +
s 1
s + 2di d
u =
s + 2
3
r n d
+
s 1
3 di
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 3/17
-
7/30/2019 Lecture 04 OCLS
14/48
Concept of Well-Posedness:
A closed-loop system is said to be well-posed, if all
transferfunctions (matrices) from all the external signals
r, n, di, d
to the input and output signals
y and u
are proper (the degree of the numerator is not bigger than
thedegree of the denominator).
If this is not true, the system is not physically
realizable.
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 4/17
-
7/30/2019 Lecture 04 OCLS
15/48
Combining external signals
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 5/17
-
7/30/2019 Lecture 04 OCLS
16/48
Combining external signals
K(s) = K(s), w1 = di, w2 = n + d r
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 5/17
-
7/30/2019 Lecture 04 OCLS
17/48
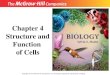
One Degree of Freedom Feedback Control System
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 6/17
-
7/30/2019 Lecture 04 OCLS
18/48
One Degree of Freedom Feedback Control System
e1 = w1 + K(s)e2, e2 = w2 + P(s)e1
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 6/17
-
7/30/2019 Lecture 04 OCLS
19/48
One Degree of Freedom Feedback Control System
e1 = w1 + K(s)e2, e2 = w2 + P(s)e1
e1 = w1+Kw2 + P e1 e1 = I K(s)P(s)1
w1 + K(s)w2
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 6/17
-
7/30/2019 Lecture 04 OCLS
20/48
One Degree of Freedom Feedback Control System
e1 = w1 + K(s)e2, e2 = w2 + P(s)e1
e1 = I K(s)P(s)1
w1 + K(s)w2e2 =
I P(s)K(s)
1
w2 + P(s)w1
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 6/17
-
7/30/2019 Lecture 04 OCLS
21/48
Criteria for Well-Posedness
The feedback system with proper K(s) and P(s)
e1 = I K(s)P(s)1
w1 + K(s)w2e2 =
I P(s)K(s)
1
P(s)w1 + w2
is well-posed if and only if
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 7/17
-
7/30/2019 Lecture 04 OCLS
22/48
Criteria for Well-Posedness
The feedback system with proper K(s) and P(s)
e1 = I K(s)P(s)1
w1 + K(s)w2e2 =
I P(s)K(s)
1
P(s)w1 + w2
is well-posed if and only if the matrix transfer function
I K(s)P(s)
1
exists and is proper.
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 7/17
-
7/30/2019 Lecture 04 OCLS
23/48
Criteria for Well-Posedness
The feedback system with proper K(s) and P(s)
e1 = I K(s)P(s)1
w1 + K(s)w2e2 =
I P(s)K(s)
1
P(s)w1 + w2
is well-posed if and only if the matrix
I K(s)P(s)
s=+is invertible.
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 7/17
-
7/30/2019 Lecture 04 OCLS
24/48
Criteria for Well-Posedness
The feedback system with proper K(s) and P(s)
e1 = I K(s)P(s)1
w1 + K(s)w2e2 =
I P(s)K(s)
1
P(s)w1 + w2
is well-posed if and only if the matrix
I K(s)P(s)
s=+is invertible.
It is sufficient to have either K(s) or P(s) strictly
proper.
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 7/17
-
7/30/2019 Lecture 04 OCLS
25/48
Lecture 4: Concepts of Well-Posedness and Internal
Stability
Well-Posedness of Feedback System
Internal Stability of Feedback System
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 8/17
-
7/30/2019 Lecture 04 OCLS
26/48
Concept of Internal Stability of Feedback System:
The well-posed feedback system
e1 = w1 + K(s)e2, e2 = w2 + P(s)e1
or the well-posed feedback system
e1 =
I K(s)P(s)
1
w1 + K(s)w2
e2 = I P(s)K(s)1
P(s)w1 + w2is said to be internally stable if all 4 transfer
functions
from (w1, w2) to (e1, e2)
have no poles in the closed right-half plane, i.e.
(I KP)1, (I KP)1K, (I PK)1P, (I PK)1
belong to RH .
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 9/17
-
7/30/2019 Lecture 04 OCLS
27/48
Example
Suppose that
P(s) = s 1
s + 1, K(s) =
1
s 1
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 10/17
-
7/30/2019 Lecture 04 OCLS
28/48
Example
Suppose that
P(s) = s 1
s + 1, K(s) =
1
s 1
Then
e1e2
=
I K(s)P(s)1
I
K(s)P(s)1
K(s)I P(s)K(s)
1
P(s)
I P(s)K(s)1
w1w2
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 10/17
-
7/30/2019 Lecture 04 OCLS
29/48
Example
Suppose that
P(s) = s 1
s + 1, K(s) =
1
s 1
Then
e1e2
=
I K(s)P(s)1
I
K(s)P(s)1
K(s)I P(s)K(s)
1
P(s)
I P(s)K(s)1
w1w2
=
s + 1s + 2
(s + 1)(s 1)(s + 2)
s 1
s + 2
s + 1
s + 2
w1
w2
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 10/17
-
7/30/2019 Lecture 04 OCLS
30/48
Example
Suppose that
P(s) = s 1
s + 1, K(s) =
1
s 1
Then
e1e2
=
I K(s)P(s)1
I
K(s)P(s)1
K(s)I P(s)K(s)
1
P(s)
I P(s)K(s)1
w1w2
=
s + 1s + 2
(s + 1)(s 1)(s + 2)
s 1
s + 2
s + 1
s + 2
w1
w2
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 10/17
-
7/30/2019 Lecture 04 OCLS
31/48
Co-Prime Factorization
Two polynomials
p(s) = sk + p1 sk1 + + pk1 s + pk
q(s) = sm + q1 sm1 + + qm1 s + qm
are called co-prime if they have no common roots.
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 11/17
-
7/30/2019 Lecture 04 OCLS
32/48
Co-Prime Factorization
Two polynomials
p(s) = sk + p1 sk1 + + pk1 s + pk
q(s) = sm + q1 sm1 + + qm1 s + qm
are called co-prime if they have no common roots.
If p(s) and q(s) are co-prime, then there are two
polynomialsx(s) and y(s) such that
x(s)p(s) + y(s)q(s) = 1
and the pair ( x(s) , y(s) ) can be found from the
(reversed)Euclids algorithm.
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 11/17
-
7/30/2019 Lecture 04 OCLS
33/48
Co-Prime Factorization
Two transfer functions p(s) RH , q(s) RH arecalled co-prime if
there are two new transfer functionsx(s) RH and y(s) RH such
that
x(s)p(s) + y(s)q(s) = 1
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 12/17
-
7/30/2019 Lecture 04 OCLS
34/48
Co-Prime Factorization
Two transfer functions p(s) RH , q(s) RH arecalled co-prime if
there are two new transfer functionsx(s) RH and y(s) RH such
that
x(s)p(s) + y(s)q(s) = 1
Meaning: if p(s) and q(s) have a common divisor h RH :
p(s) = h(s)p1(s) and q(s) = h(s)q1(s)
such that
p1(s) RH and q1(s) RH
then
h1(s) RH
i.e. h(s) has neither zeros no poles in the closed
right-halfplane (such transfer functions are called
minimum-phase).
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 12/17
-
7/30/2019 Lecture 04 OCLS
35/48
Co-Prime Factorization
Two matrix transfer functions M(s), N(s) RH are calledright
co-prime over RH if
they have the same number of columns
there are matrices Xr(s) , Yr(s) RH such that
Xr(s), Yr(s)
M(s)
N(s)
= Xr(s)M(s)+Yr(s)N(s) = I
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 13/17
-
7/30/2019 Lecture 04 OCLS
36/48
Co-Prime Factorization
Two matrix transfer functions M(s), N(s) RH are calledright
co-prime over RH if
they have the same number of columns
there are matrices Xr(s) , Yr(s) RH such that
Xr(s), Yr(s)
M(s)
N(s)
= Xr(s)M(s)+Yr(s)N(s) = I
Two matrix transfer functions M(s), N(s) RH are calledleft
co-prime over RH if
they have the same number of rows there are matrices Xl(s) ,
Yl(s) RH such that
M(s), N(s) Xl(s)Yl(s)
= M(s)Xl(s)+N(s)Yl(s) = Ic A.Shiriaev/L. Freidovich. Januar 29,
2010. O timal Control for Linear S stems: Lecture 4 . 13/17
-
7/30/2019 Lecture 04 OCLS
37/48
Defining a Co-Prime Factorization
Given a matrix transfer function G(s) , then
G(s) = N(s)M1(s) is a right co-prime factorization, if
M(s), N(s) are right co-prime over RH ;
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 14/17
-
7/30/2019 Lecture 04 OCLS
38/48
Defining a Co-Prime Factorization
Given a matrix transfer function G(s) , then
G(s) = N(s)M1(s) is a right co-prime factorization, if
M(s), N(s) are right co-prime over RH ;
G(s) = M1(s)N(s) is a left co-prime factorization, if
M(s),
N(s) are left co-prime over
RH;
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 14/17
-
7/30/2019 Lecture 04 OCLS
39/48
Defining a Co-Prime Factorization
Given a matrix transfer function G(s) , then
G(s) = N(s)M1(s) is a right co-prime factorization, if
M(s), N(s) are right co-prime over RH ;
G(s) = M1(s)N(s) is a left co-prime factorization, if
M(
s)
, N(
s) are left co-prime over
RH;
G(s) is said to have double co-prime factorization, if thereare
right and left co-prime factorizations such
Xr(s) Yr(s)
N(s) M(s)
M(s) Yl(s)
N(s) Xl(s)
= I
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 14/17
-
7/30/2019 Lecture 04 OCLS
40/48
Computing a Co-Prime Factorization
Given a matrix transfer function G(s) = A B
C D
with
(A, B) stabilizable, i.e. F : (A + BF) is stable;
(A, C) detectable, i.e. L : (A + LC) is stable;
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 15/17
C i C P i F i i
-
7/30/2019 Lecture 04 OCLS
41/48
Computing a Co-Prime Factorization
Given a matrix transfer function G(s) = A B
C D
with
(A, B) stabilizable, i.e. F : (A + BF) is stable;
(A, C) detectable, i.e. L : (A + LC) is stable;
The left and right co-prime factorizations can be computed
as
M(s) Yl(s)N(s) Xl(s)
:=
A + BF B LF I 0C + DF D I
Xr(s) Yr(s)
N(s) M(s)
:=
A + LC (B + LD) LF I 0C D I
That is, G(s) = N(s)M
1(s) = M
1(s)N(s) , and theseare coefficients of the double co-prime
factorization.
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 15/17
U i C P i F t i ti
-
7/30/2019 Lecture 04 OCLS
42/48
Using a Co-Prime Factorization
One Degree of Freedom Feedback Control System
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 16/17
U i C P i F t i ti
-
7/30/2019 Lecture 04 OCLS
43/48
Using a Co-Prime Factorization
Given plant and controller matrix transfer functions
P(s) = N(s)M1(s) = M1(s)N(s)
K(s) = U(s)V
1
(s) =V
1
(s)
U(s)
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 16/17
Using a Co Prime Factorization
-
7/30/2019 Lecture 04 OCLS
44/48
Using a Co-Prime Factorization
Given plant and controller matrix transfer functions
P(s) = N(s)M1(s) = M1(s)N(s)
K(s) = U(s)V
1
(s) =V
1
(s)
U(s)
The following conditions are equivalent:
the closed-loop system is internally stable; (I KP)1 , (I KP)1K
, (I PK)1P , and
(I PK)1 RH ;
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 16/17
Using a Co Prime Factorization
-
7/30/2019 Lecture 04 OCLS
45/48
Using a Co-Prime Factorization
Given plant and controller matrix transfer functions
P(s) = N(s)M1(s) = M1(s)N(s)
K(
s) =
U(
s)
V1
(s
) =V1
(s
)U
(s
)
The following conditions are equivalent:
the closed-loop system is internally stable; (I KP)1 , (I KP)1K
, (I PK)1P , and
(I PK)1 RH ;
the matrix function
M U
N V
is invertible in RH ;
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 16/17
Using a Co Prime Factorization
-
7/30/2019 Lecture 04 OCLS
46/48
Using a Co-Prime Factorization
Given plant and controller matrix transfer functions
P(s) = N(s)M1(s) = M1(s)N(s)
K(
s) =
U(
s)
V1
(s
) =V1
(s
)U
(s
)
The following conditions are equivalent:
the closed-loop system is internally stable; (I KP)1 , (I KP)1K
, (I PK)1P , and
(I PK)1 RH ;
the matrix function
M U
N V
is invertible in RH ;
the matrix function V U
N M
is invertible in RH
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 16/17
Next Lecture / Assignments:
-
7/30/2019 Lecture 04 OCLS
47/48
Next Lecture / Assignments:
Next lecture (February 2, 13:15-15:00, in A208):Performance
Specifications and Limitations.
The first assignment is due to hand in.
Next practice: February 3, 10:15-12:00, in A205,
You are invited to attend Ph.D. defense of Uwe Metin:February 5,
9:00-12:00, in N200, Naturvetarhuset;Title: Principles for Planning
and Analyzing Motions of Underactu-
ated Mechanical Systems and Redundant Manipulators.
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 17/17
Next Lecture / Assignments:
-
7/30/2019 Lecture 04 OCLS
48/48
Next Lecture / Assignments:
Next lecture (February 2, 13:15-15:00, in A208):Performance
Specifications and Limitations.
The first assignment is due to hand in.
Next practice: February 3, 10:15-12:00, in A205,
You are invited to attend Ph.D. defense of Uwe Metin:February 5,
9:00-12:00, in N200, Naturvetarhuset;Title: Principles for Planning
and Analyzing Motions of Underactu-
ated Mechanical Systems and Redundant Manipulators.
Problem: Let G(s) = (s1)(s+2)(s3) . Find a stable co-prime
factorization G(s) = n(s)m(s)
and x, y RH such that
xn + ym = 1 .
c A.Shiriaev/L. Freidovich. Januar 29, 2010. O timal Control for
Linear S stems: Lecture 4 . 17/17