-
7/25/2019 Lecture 02 Introduction
1/17
e
c
V
b
a
o
e
c
V
b
a
o
Lecture 2:
Spring and Stiffness
Mass or Inertia Elements Damping
Introduction -1
With many figures and models fromMechanical Vibrations, S. S.
Rao
-
7/25/2019 Lecture 02 Introduction
2/17
e
c
V
b
a
o
e
c
V
b
a
o
Spring Elements
Combination of Springs:1) Springs inparallel if we have n
spring
constants k1, k2, , kn inparallel, then the
equivalent spring constant keq is:
neq kkkk ...21
Introduction -2
-
7/25/2019 Lecture 02 Introduction
3/17
e
c
V
b
a
o
e
c
V
b
a
o
Spring Elements
Combination of Springs:2) Springs in series if we have n
spring
constants k1, k2, , kn in series, then the
equivalent spring constant keq is:
Introduction -3
neq kkkk
1...
111
21
-
7/25/2019 Lecture 02 Introduction
4/17
e
c
V
b
a
o
e
c
V
b
a
o
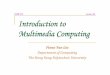
It is the rigid element of the vibratory system that lose
or gain kinetic energy depending on its velocity
Using mathematical model to represent the actual
vibrating system
E.g. In figure below, the mass and damping of the beam can
bedisregarded; the system can thus be modeled as a spring-mass
system as shown.
Mass or Inertia Elements
Mx(t)
x(t)
3
3
l
EIk
Actual system Single degree offreedom model Introduction -4
-
7/25/2019 Lecture 02 Introduction
5/17
e
c
V
b
a
o
e
c
V
b
a
o
Mass or Inertia Elements
Combination of MassesE.g. Assume that the mass
of the frame is negligible
compared to the masses of
the floors. The masses ofvarious floor levels represent
the mass elements, and the
elasticities of the vertical
members denote the spring
elements.
Introduction -5
-
7/25/2019 Lecture 02 Introduction
6/17
e
c
V
b
a
o
e
c
V
b
a
o
Masses Connected by a Rigid Bar
Velocities of masses can be expressed as:
1
1
3
31
1
2
2 x
l
lxx
l
lx
Mass or Inertia Elements
Introduction -6
-
7/25/2019 Lecture 02 Introduction
7/17
e
c
V
b
a
o
e
c
V
b
a
o
Mass or Inertia Elements
Introduction -7
Masses Connected by a Rigid Bar
By equating the kinetic energy of the system:
1xx
eq
2
eqeq
2
33
2
22
2
11 2
1
2
1
2
1
2
1xmxmxmxm
3
2
1
32
2
1
21eq m
l
lm
l
lmm
-
7/25/2019 Lecture 02 Introduction
8/17
e
c
V
b
a
o
e
c
V
b
a
o
Example P1.53
Find theequivalent mass
of this system?
Introduction -8
-
7/25/2019 Lecture 02 Introduction
9/17
e
c
V
b
a
o
e
c
V
b
a
o
Example P1.53
When mass m isdisplaced by x, the
bell crank lever
rotates by the
angle:
This makes thecenter of the
sphere displace by
(xs):
11
tanl
x
l
xbb
2lx
bs
x
xs
Introduction -9
-
7/25/2019 Lecture 02 Introduction
10/17
e
c
V
b
a
o
e
c
V
b
a
o
Example P1.53
The kinetic energy of the system can beexpressed as:
For a sphere:
Equating this to:
11
tanl
x
l
xbb
2
5
2sss
rmJ
2
1
2
2
1
222
2
1
2
2
1
5
2
2
1
2
1
2
1
l
lxm
rl
lxrm
l
xJxmT
s
s
sso
T =1
2meqx
2
meq =m+Jo1
l12+7
5ms
l2
2
l12
Introduction -10
-
7/25/2019 Lecture 02 Introduction
11/17
e
c
V
b
a
o
e
c
V
b
a
o
Damping Elements
Damperis the element in vibratory system thatassumed to have
neither mass nor elasticity and
responsible for energy loss in a typical
mechanical system.
Viscous Damping
Energy is dissipated bythe Resistance of a fluid
Friction Damping
Energy is dissipated bythe friction between
rubbing surfaces
Hysteretic Damping
Energy is stored anddissipated by the
material as deformation
takes place
Introduction -11
-
7/25/2019 Lecture 02 Introduction
12/17
e
c
V
b
a
o
e
c
V
b
a
o
Viscous Damping
All real systems dissipate energy when they vibrate. To
account for this we must consider damping. The most simple
form of damping (from a mathematical point of view) is
called
viscous damping. A viscous damper (or dashpot) produces a
force that is proportional to velocity.
Damper (c)
x
fc
Mostly a mathematically motivated form, allowinga solution to
the resulting equations of motion that predicts
reasonable (observed) amounts of energy dissipation.
Introduction -12
-
7/25/2019 Lecture 02 Introduction
13/17
e
c
V
b
a
o
e
c
V
b
a
o
Viscous Damping
fc is a resistance force and it is always in anopposite
direction relative to the body motion.
Introduction -13
x
y
x> y
x
y
x< y
body body
-
7/25/2019 Lecture 02 Introduction
14/17
e
c
V
b
a
o
e
c
V
b
a
o
Example 1.74
Find an expression for the equivalent translationaldamping
constant of the system shown below so
that the force F can be expressed as F= ceqv,
where vis the velocity of the rigid bar A.
Introduction -14
-
7/25/2019 Lecture 02 Introduction
15/17
e
c
V
b
a
o
e
c
V
b
a
o
Example 1.74
ceq1 ceq2
Thus the system can be replaced by the two equivalent dampers in
parallel:
So that;
Introduction -15
-
7/25/2019 Lecture 02 Introduction
16/17
e
c
V
b
a
o
e
c
V
b
a
o
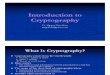
Example 1.2
Suggest a simple mathematical model byconsidering the
elasticity, mass, and damping
of the seat, human body, and restraints for a
vibration analysis of the system.
Introduction -16
-
7/25/2019 Lecture 02 Introduction
17/17
e
c
V
b
a
o
e
c
V
b
a
o
Example 1.2
Introduction -17