Embed Size (px)
Citation preview

Leaving Cert Maths - Higher Level
J.P. McCarthy
February 22, 2010

Contents
1 Algebra 61.1 How Mathematics Works . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.2 Number Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.3 Arithmetic in R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3.1 Notation and Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.3.2 The Axioms of Arithmetic in R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.3.3 Significant Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.3.4 Absolute Value . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.3.5 Powers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.3.6 Logarithms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.4 What the hell is x?? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.4.1 The Axioms of Arithmetic in R Revisited . . . . . . . . . . . . . . . . . . . . . . . . . 171.4.2 The Laws of Indices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.4.3 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.4.4 Proposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.5 How to put this Knowledge to Good Use in Leaving Cert? . . . . . . . . . . . . . . . . . . . . 211.5.1 Seven Deadly Sins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.6 Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.6.1 What is an Equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
1.7 Elements of Algebra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251.7.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251.7.2 Simplifying Expressions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251.7.3 Expanding Linear Products . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251.7.4 Linear Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261.7.5 Addition of Algebraic Fractions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261.7.6 Linear Inequalities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281.7.7 Factoring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301.7.8 The Difference of Two Squares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311.7.9 Grouping Terms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 321.7.10 Factorisation for Simplification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 331.7.11 Solving Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2 Functions 352.1 Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352.2 Types of Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.3 Properties of Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.3.1 Range . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.3.2 Period of a Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.3.3 Roots or Zeros of a Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.3.4 Maxima and Minima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3 Polynomials 403.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.1.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403.1.2 Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
1

Leaving Cert Maths 2
3.1.3 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.1.4 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.2 The Roots of a Polynomial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.2.1 Theorem: Factor Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.2.2 Theorem: Fundamental Theorem of Algebra . . . . . . . . . . . . . . . . . . . . . . . . 42
3.3 Quadratic Polynomials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.3.1 Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.3.2 Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.4 Cubic Polynomials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 443.5 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4 Complex Numbers 464.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 464.2 The Construction of C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.2.1 Complex Numbers as Points on the Plane . . . . . . . . . . . . . . . . . . . . . . . . . 474.2.2 Operations More Intuitively . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.3 Modulus and Conjugation of Complex Numbers . . . . . . . . . . . . . . . . . . . . . . . . . . 494.3.1 Modulus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.3.2 Conjugation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.3.3 Proposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504.3.4 Theorem: Conjugate Root Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . 514.3.5 Corollary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.4 Polar Coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 524.4.1 De Moivre’s Theorem for Integers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 524.4.2 Corollary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.5 Roots of Complex Numbers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544.5.1 Cubic Roots of Unity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
5 Matrices 565.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.1.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 565.1.2 Addition of Matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 565.1.3 Scalar Multiplication of a Matrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 565.1.4 Equality of Matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.2 Multiplication of Matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 575.2.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 575.2.2 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.3 The Eigenvalue Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 595.4 The Multiplicative Inverse of a Number . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.4.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 605.4.2 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 605.4.3 Proposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 615.4.4 Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 615.4.5 Matrix Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.5 Diagonal Matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 645.5.1 Proposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 645.5.2 Proposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6 Limits 666.1 What is a Limit? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.1.1 Rough and Ready Approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 666.1.2 Mathematical Approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 676.1.3 Laws of Limits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.2 Asymptotes of a Curve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 696.2.1 Horizontal Asymptotes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 696.2.2 Vertical Asymptotes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70

Leaving Cert Maths 3
7 Sequences and Series 727.1 Introduction: Sequences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 727.2 Introduction: Series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 737.3 Arithmetic Sequences & Series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
7.3.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 747.3.2 Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
7.4 Geometric Sequences & Series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 747.4.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 747.4.2 Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
7.5 Infinite Geometric Series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 757.5.1 Lemma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 757.5.2 Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 757.5.3 Recurring Decimals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
7.6 Arithmetico-Geometric Series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 777.7 Partial Fractions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
7.7.1 Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 777.8 Difference Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
7.8.1 Example: The Fibonacci Sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 787.8.2 Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
7.9 Exam Paper Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 797.9.1 2009 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
8 Differentiation, Integration and the Fundamental Theorem of Calculus 828.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 828.2 Differentiation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
8.2.1 Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 848.3 Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
8.3.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 878.4 Fundamental Theorem of Calculus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
8.4.1 Rough Version . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 878.4.2 The Indefinite Integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
8.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
9 Differentiation 909.1 Differentiation from First Principles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
9.1.1 Proposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 909.2 The Chain Rule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 929.3 Implicit Differentiation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
10 Integration 9410.1 What We Know . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9410.2 Properties of Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
10.2.1 Proposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9510.2.2 The Substitution Method for Evaluating Integrals . . . . . . . . . . . . . . . . . . . . 96
10.3 Indefinite Integrals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9610.3.1 Proposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
10.4 Techniques of Trigonometric Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9610.4.1 Products of Unlike Trigonometric Terms . . . . . . . . . . . . . . . . . . . . . . . . . . 9710.4.2 Products of Powers of sin & cos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9710.4.3 cos3 x and sin3 x . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
10.5 Intersecting Curves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
11 Applications of Calculus 10011.1 Maxima, Minima and Points of Inflection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
11.1.1 Local Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10111.1.2 Local Minima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10111.1.3 Critical Point Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
11.2 Rates of Change . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102

Leaving Cert Maths 4
11.2.1 Velocity & Acceleration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10211.3 The Newton-Raphson Method of Approximating Roots . . . . . . . . . . . . . . . . . . . . . 103
11.3.1 Newton-Raphson Approximation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10411.3.2 Number of Real Roots . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
12 Trigonometry 10512.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10512.2 The Basics: Angles, sin, cos & tan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
12.2.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10512.2.2 sin, cos & tan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10512.2.3 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
12.3 Three Fundamental Relations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10712.3.1 Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10712.3.2 Theorem: The Cosine Rule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10712.3.3 Theorem: Sine Rule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
12.4 Twenty Formulae . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10812.4.1 Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10812.4.2 Corollary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10912.4.3 Corollary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10912.4.4 Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10912.4.5 Corollary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11012.4.6 Corollary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11012.4.7 Corollary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11012.4.8 Corollary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11112.4.9 Corollary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11112.4.10Corollary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11112.4.11Corollary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11212.4.12Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11212.4.13Corollary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11212.4.14Corollary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11312.4.15Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11312.4.16Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11412.4.17Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11412.4.18Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11412.4.19Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11512.4.20Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
12.5 Changing Products to Sums and Sums to Products . . . . . . . . . . . . . . . . . . . . . . . . 11512.6 Inverse Trigonometric Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
12.6.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11712.6.2 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
12.7 A Special Limit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
13 Vectors and Transformations 12013.1 Vectors: A More Technical Approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
13.1.1 The Vector Space {R2,+, ·} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12013.1.2 The i-j Plane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12113.1.3 Dot Product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12113.1.4 Perpendicular Vector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
13.2 Transformations of the Plane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
14 Appendices 12514.1 Examinable Proofs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
14.1.1 Algebra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12514.1.2 Geometry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
14.2 Differentiation: Learning Scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13114.2.1 Differentiation from First Principles . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13114.2.2 The Chain Rule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132

Leaving Cert Maths 5
14.2.3 The Exponential Function, ex . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13214.2.4 Inverting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13214.2.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
14.3 Paper 1 Questions 1-3: 6 Need To Knows . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13414.3.1 Factor Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13414.3.2 Simultaneous Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13514.3.3 Inequalities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13714.3.4 Quadratic Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13814.3.5 Matrix Multiplication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14014.3.6 Polar Form . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
14.4 Paper 1 Questions 6-8: 6 Need to Knows . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14314.4.1 Parametric Differentiation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14314.4.2 Max/ Min Problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14414.4.3 The Exponential Function & The Natural Logarithm . . . . . . . . . . . . . . . . . . . 14614.4.4 Differentiation of Trigonometric Functions . . . . . . . . . . . . . . . . . . . . . . . . . 14814.4.5 Substitution Technique for Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . 14914.4.6 Areas under Curves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
14.5 Paper 2 Questions 1-3: 4 Need to Knows . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15214.5.1 Puzzles in g, f , c . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15214.5.2 Tangents to Circles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15314.5.3 Coordinate Geometry of the Line Formulae . . . . . . . . . . . . . . . . . . . . . . . . 15414.5.4 The Dot Product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
14.6 Paper 2: Q. 4,5 - Trigonometry 6 Need to Knows . . . . . . . . . . . . . . . . . . . . . . . . . 15814.6.1 The Unit Circle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15814.6.2 Radians, Arcs & Sectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15914.6.3 Compound Angles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16114.6.4 Double Angles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16314.6.5 Area of a Triangle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16614.6.6 Sine & Cosine Rules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
14.7 Key Elements of Paper 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17014.7.1 Probability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170

Chapter 1
Algebra
1.1 How Mathematics Works
The Penguin Dictionary of Mathematics defines mathematics as the study of numbers, shapes and otherentities by logical means. The critical terms here are by logical means. Logic is defined as the study ofdeductive argument. The central concept of logic is that of a valid argument where, if the premises are true,then the conclusion must also be true. As a simple example:
• All men are mortal
• John is a man
• Therefore John is mortal
The statements John is a man and All men are mortal are the premises of the argument and the conclusionfollows logically. Clearly if the premises are false, then the conclusion may also be false. In mathematics, weargue in the same way. With true premises, a valid argument will produce a conclusion. In mathematics, aset of true premises together with a valid argument is what is known as a proof ; and the conclusion to thisargument is called a theorem. Mathematics in an area may be further developed by using this theorem as apremise in a further argument. So in this sense good mathematics is like a house - further mathematics isbuilt on past results. In this sense the possibilities for new mathematics is boundless.
In the other direction however a seemingly insurmountable difficulty arises. New theorems engenderfurther new theorems but how do is the truth of each premise guaranteed? A valid proof from true premises.These premises? A valid proof from true premises. This infinite descent cannot go on forever however; hencethere must be a number of premises, true premises, for which there is no proof. These basic premises orassumptions are known as axioms; and they are the basic building blocks, or foundation of all subsequenttheorems in that area. These are statements that are assumed to be true without proof, and in LeavingCert mathematics, the axioms behind the mathematics are deemed self-evidently true. As an example fromgeometry,
For a given point outside a given line, only one line can be drawn through the point parallel tothe given line
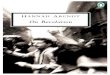
However, as long as a set of axioms is not self-contradictory1, they can be used with valid argument todevelop a new theory. The classic example is geometry. Ordinary or Euclidean geometry is axiomised in thecontext of flat space - where, for example, the shortest distance between two points is a line. Under this setof axioms, in particular, it can be proven that the internal angles of a triangle add up to 180◦. However,in spherical geometry, the geometry of a the surface of a sphere, the different set of axioms under validargument do not give the conclusion that a triangle has 180◦. Indeed to be technical spherical geometrydefines a triangle slightly differently as there are no three straight sides as in flat space but naıvely consideran orange. At the top of the orange draw two straight lines to the bottom; but at the top they must beat right angles to each other. Draw a line along the equator joining the two line segments. This forms atriangle with 270◦!
1using a self-contradictory set of axioms the opposite of one particular axiom may be proved using some of the other axioms.Then there is a contradiction; a statement that is both true AND false. Obviously this destroys the theory.
6

Leaving Cert Maths 7
Figure 1.1: Under the axioms of spherical geometry, it is not true that the angle of a triangle necessarilyadd to 180◦. In this case, a triangle of degree 270◦ has been constructed
When doing Leaving Certificate mathematics it is not necessary to be constantly conscious of any set ofaxioms. They are not on the course and are not examinable. However for deep understanding it is key thatthe system or method of maths is seen to be the repeated deduction of theorems from axioms and proventheorems. This is how the subject is built and it highlights the massive importance of algebra in success inLeaving Cert mathematics. Without a strong foundation in algebra competency in the rest of the courseisn’t difficult, but impossible. The remainder of this note will talk about number systems or number sets.Common arithmetic in the real numbers, R, will be examined. The axioms of arithmetic shall be presentedin laymen’s terms. At this point the significance and whole reason for algebra becomes apparent and thesection of arithmetic in R is presented algebraically.
1.2 Number Systems
Here the five different number sets used in Leaving Cert mathematics are presented.
• The Natural Numbers, NThe natural numbers are the counting numbers:
N := {1, 2, 3, . . . }
• The Integers, ZThe set of integers comprise the counting numbers, 0 as well as the negative whole numbers:
Z := {0,±1,±2,±3, . . . }
• The Rational Numbers, QThe rational numbers or fractions are those numbers which can be expressed as a ratio of two integers.For example;
1
2, − 2
3,
23
12
Q := {any number which can be written as a fraction of integers}
• The Real Numbers, REssentially a real number is any number or point on the numberline. It can be written as a decimal,although it may have an infinite number of decimal entries.
R := {any number which can be written as a decimal, whether finite or not}

Leaving Cert Maths 8
• The Complex Numbers, CA complex number is a number which contains a real part and an imaginary part. Examples include0 + 2i, 4 + 2i and
√2− 9i, where i =
√−1.
C := {a number composed of a real part and an imaginary part comprised of i,
the square root of -1 multiplied by a real number}
It is critical to note that these sets form a nest of sets:
N ⊂ Z ⊂ Q ⊂ R ⊂ C.
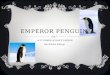
This means that every fraction is a complex number (i.e. 1/2 = 1/2 + 0i), every integer is a fraction (i.e.4 = 4/1), every integer is a real number (i.e. −3 = −3.0). This fact is best displayed in an Argand Diagram:
Real Part
Imaginary Part
Figure 1.2: In this plot, the natural numbers N are the green ticks, the integers Z are those green tickstogether with the black ticks in the negative half of the plane. Also 22/5 in the rational numbers Q and
√52
in the real numbers R are marked. The complex numbers C are points on the plane such as (3, 4), whichrepresents 3 + 4i.
1.3 Arithmetic in RArithmetic in R is what would commonly be referred to as sums. Addition, subtraction, multiplication anddivision of ordinary numbers. A number of concepts are introduced loosely. Later the full generalisationswill be presented; algebraically.
1.3.1 Notation and Conventions
In order to have a coherent representation of mathematical expressions and thoughts it is vital that aconsistent notation is used to express mathematical thoughts. As one delves further into maths there arenotions that can be communicated through English but such is the complexity of the ideas that a whole newlanguage is needed to communicate. Indeed even at the level of Leaving Cert maths consider the BinomialTheorem, quoted through English:
The sum of real numbers x and y, brought to the power of n a natural number is equal to thesum of the products of the binomial numbers
(nr
), x to the power of n− r and y to the power of
r, as r runs through 0, 1, 2, . . . , n
Clearly this is a remarkably cumbersome English statement. However in mathematical notation:
(x+ y)n =
(n
0
)xn +
(n
1
)xn−1y +
(n
2
)xn−2y2 +
(n
3
)xn−3y3 + · · ·+
(n
n
)yn
Or even better,
(x+ y)n =n∑
r=0
(n
r
)xn−ryr.

Leaving Cert Maths 9
With a strong sense of the meaning of all notation of the Leaving Cert course, many issues of confusion areavoided.
With this in mind consider the two statements:
• Multiply 3 by 4; and add 5
• Multiply 3 by the sum of 4 and 5
Both seem to represented by 3× 4+ 5 and this is a clear ambiguity. Hence brackets are used to clear up theconfusion as otherwise the absurd conclusion that 17 = 27 can be made. Hence in mathematical notationthe statements become
• (3× 4) + 5, and
• 3× (4 + 5).
What is to be understood is that the Hierarchy of Mathematics, the stated order in which mathematicaloperations should be done:
1. Brackets
2. Powers and Roots
3. Multiplication and Division
4. Addition and Subtraction
is nothing more than a rule or convention in order that mathematical ideas on paper are not ambiguous. Anotation or language must be consistent to make sense and the Hierarchy of Mathematics is a convention allmathematicians adopt so communication is possible. What it really states is:
5(2 + 3)4 + 6
means
Take the sum of two and three and bring this sum to the power of four. Multiply this by five.Add six.
Rather than any other possible interpretation. Note the expression 5(4) = 5× 4.
1.3.2 The Axioms of Arithmetic in RHere the axioms of the real numbers R are presented casually, with number referring to a real number2.
Closure
The addition of two numbers and the multiple of two numbers is another number. For example, with 2, 3 ∈ R;
2 + 3 = 5; 5 ∈ R.2× 3 = 6; 6 ∈ R.
Commutivity
The order in which addition or multiplication takes place is irrelevant. Addition and multiplication are saidto commute;
2 + 3 = 5 = 3 + 2,
2× 3 = 6 = 3× 2.
2the set of real numbers together with the operations of plus + and multiplication × is an example of an algebraic structurecalled a field

Leaving Cert Maths 10
Associativity
The result of adding a number of numbers does not depend on how the numbers are grouped. This axiomis also true for multiplication;
2 + (3 + 4) = 9 = (2 + 3) + 4;
2× (3× 4) = 24 = (2× 3)× 4.
Identity
0 and 1 are known as the additive and multiplicative identities respectively. This means if 0 is added to anumber it doesn’t change the number; and if 1 multiplies a number it doesn’t change the number:
0 + 2 = 2;
1× 2 = 2.
Subtraction and Division
Every number has a negative (its additive inverse). So take 2 ∈ R. There exists its negative, −2, such that:
2 + (−2) = 0.
In this sense there is no such thing as subtraction. Strictly subtraction of a number is the addition of itsnegative.
Every non-zero number has its inverse (multiplicative inverse). Take 2 ∈ R. Its inverse is 1/2, suchthat:
2× 1
2= 1.
In this sense there is no such thing as division. Strictly division by a number is the multiplication by itsinverse.
Distributive Law
If a number multiplies a sum, the result is the sum of the numbers multiplied by the addends3:
2× (3 + 4) = 14 = (2× 3) + (2× 8).
Note the restriction on inverses to non-zero numbers. When working with numbers it is clear that zerotimes a number is zero; e.g. 2 × 0 = 0. However note that this isn’t an axiom - a minimal set of axioms isdesirable. Hence to demonstrate how mathematics really works consider this proof sketch of why a numbertimes zero is zero.Theorem: A number multiplied by zero equals zero.Proof: 6 ∈ R and it is clear that 6 = 6. 6 has a negative; namely −6;
⇒ 6 + (−6) = 0.
By multiplicative identities, 6 = 6(1) and −6 = 6(−1) where −1 is the additive inverse of 1. Now,
6(1) + 6(−1) = 0.
By the distributive law;
6(1 + (−1)) = 0.
But −1 is the additive inverse of 1; 1 + (−1) = 0;
6(0) = 6× 0 = 0.
3again a lot easier algebraically

Leaving Cert Maths 11
But there is nothing special about 6 here4; hence any number multiplied by zero is zero. �
Hence, suppose 0 had a multiplicative inverse; 1/0, or 0−1;
0× 1
0= 1.
But it has just been shown that zero times any number is 0. This implies;
0 = 0× 1
0= 1,
⇒ 0 = 1,
which is a contradiction or absurdity. Hence only non-zero numbers have multiplicative inverses.
1.3.3 Significant Figures
This term is examinable so be clear on its correct definition.
Example: Decimal Places
Evaluate 4√2(5.3)3 + 1 to three decimal places.
Solution: Using a calculator,
5.33 = 148.877,
2(5.3)3 = 297.754
2(5.3)3 + 1 = 298.7544√
2(5.3)3 + 1 = 4.15746
Hence, rounding up, to three decimal places:
4√
2(5.3)3 + 1 = 4.158.
Significant Figures
Evaluate 4√2(5.3)3 + 1 to three significant figures.
Solution: It has been shown that 4√2(5.3)3 + 1 = 4.15756. Hence, rounding up, to three significant figures,
4√2(5.3)3 + 1 = 4.16.
Reading from left to right, the first nonzero digit of a number after rounding is the first of the run ofsignificant numbers.
1.3.4 Absolute Value
In ordinary terms, the absolute value of a real number, say 5, is denoted |5|, and is the distance from zeroon the number line - in this case 5. For example | − 3| = 3 = |3|. Absolute value is the magnitude or size ofa number.
1.3.5 Powers
Consider the product:3× 3× 3× 3× 3× 3× 3︸ ︷︷ ︸
7 multiplicands
(1.1)
There is a notation to represent this object:
3× 3× 3× 3× 3× 3× 3 =: 37,
three to the power of seven. The rules of powers are known as the laws of indices.
4algebra sidesteps this kind of argument

Leaving Cert Maths 12
Multiplication
Note that
3× 3× 3× 3︸ ︷︷ ︸4 multiplicands
× 3× 3× 3︸ ︷︷ ︸3 multiplicands︸ ︷︷ ︸
7 multiplicands
,
⇒ 3× 3× 3× 3︸ ︷︷ ︸4 multiplicands
× 3× 3× 3︸ ︷︷ ︸3 multiplicands
= 37,
⇒ 34 × 33 = 34+3 = 37.
So in ordinary language, to multiply like-powers5, add the powers.
Division
Consider 35 ÷ 32;
35 ÷ 32 =3× 3× 3× 3× 3
3× 3,
⇒ 35 ÷ 32 = (3× 3× 3)3× 3
3× 3,
⇒ 35 ÷ 32 = (3× 3× 3)× 1,
⇒ 35 ÷ 32 = 33,
⇒ 35 ÷ 32 = 35−3 = 32.
In ordinary language, to divide like-powers subtract the powers.
Repeated Powers
Consider (32)3;
(32)3 = (3× 3)3,
⇒ (32)3 = (3× 3)× (3× 3)× (3× 3),
⇒ (32)3 = 3× 3× 3× 3× 3× 3 = 36,
⇒ (32)3 = 3(2×3) = 36.
In ordinary language, for repeated powers multiply the powers. Note there is another potential banana skinhere with notation. Consider,
(32)3
3(23)
323
The first two statements here convey
(32)3 = (9)3 = 729,
3(23) = 38 = 6561,
⇒ (32)3 = 3(23).
What for 323
? This statement is meaningless and is never used in order to avoid confusion.
5This loose term refers to 55 and 57 as like powers. Not like-powers include 34 and 47 and 47 and 67. The number broughtto the power must be common to both terms, as in (1.1)

Leaving Cert Maths 13
Powers of a Product
Consider (3× 2)4;
(3× 2)4 = (3× 2)× (3× 2)× (3× 2)× (3× 2)︸ ︷︷ ︸four multiplicands
,
⇒ (3× 2)4 = 3× 2× 3× 2× 3× 2× 3× 2.
It is clear 3× 2 = 2× 3 so this may be rearranged to give
(3× 2)4 = 3× 3× 3× 3× 2× 2× 2× 2,
⇒ (3× 2)4 = (3× 3× 3× 3)× (2× 2× 2× 2),
⇒ (3× 2)4 = 34 × 24 = 3424.
In ordinary language, to raise a product to a power, raise each individual number to the power.
Zero Powers
What is 30? If the division is law is considered;
35
35= 1;
35
35= 35 ÷ 35 = 35−5 = 30;
⇒ 30 = 1.
A number to the power of zero is one.
Negative Powers
Can sense be made of negative powers? If two to the power of three is two by two by two; what the hell istwo to the power of minus three?! The multiplication and zero powers laws for indices tells us how to define2−3.
23 × 2−3 = 23−3 = 20 = 1,
⇒ 1
23(23 × 2−3) =
1
23,
⇒ 2−3 =1
23.
In ordinary language, a negative power is the reciprocal6 of the positive power.
Reciprocal and Fractional Powers
Consider 23/3;
2 = 21 = 23/3 = (21/3)3,
⇒ (21/3)3 = 2.
Taking the cube root of both sides:
⇒ 21/3 =3√2.
So a base number raised to one over a power number, is the power-number-th-root of the base number7.
This law, along with the repeated power law allows fractional powers to be defined. For exampleconsider 32/5;
22/5 = (21/5)2 = (5√2)2, or
22/5 = (22)1/5 =5√22.
6the reciprocal of a number is one over the number. E.g. the reciprocal of 6 is 1/67This law is much easier to state algebraically

Leaving Cert Maths 14
1.3.6 Logarithms
What is a log? The log of a number, with respect to a base number, is the power to which the base wouldhave to be raised to result in the number? Confused? For example, what is the log of 8 in the base 2? Inmathematical notation, what is log2 8? The answer is 3 because 23 = 8. Hence log is defined with respectto powers; e.g.
log2 8 = 3 ⇔ 23 = 8,
where ⇔ denote equivalency. Like powers, there are a number of standard laws that govern logs8. At thisstage it is difficult to present these concepts without xs etc.
Powers (or exponentials) and logs are inverse functions9. This means that
3log3 5 = 5, and (1.2)
log3 35 = 5. (1.3)
Also if two logs are equal, then the numbers are equal;
log2 32 = log2 9 ⇔ 32 = 9, as
log2 32 = log2 9 ⇒ 2ln2 9 = 2ln2 32 ;
⇒ 9 = 32.
Sum Rule
Consider log10 4 + log10 2 and working to three decimal places;
log10 4 = 0.602,
log10 2 = 0.301.
⇔ 100.602 = 4; 100.301 = 2.
4× 2 = 8;
8 = 4× 2 = (100.602)(100.301).
But by the product rule for indices;
(100.602)(100.301) = 100.602+0.301,
⇒ 100.602+0.301 = 4× 2,
⇔ 0.601 + 0.301 = log10((4)(2)),
⇒ log10 4 + log10 2 = log10((4)(2)).
So the sum of logs to a common base is the log of the product.
Multiplication Rule
Take
3 log10 2 = log10 2 + log10 2 + log10 2,
⇒Sum Rule
3 log10 2 = log10(2× 2× 2)
⇒ 3 log10 2 = log10 23.
Again difficult to express in English; the log of number brought to a power is the log of the number multipliedby the power.
8the brief explanations for how and why these laws work are very much open to objection. Later the algebraic proofs destroyany such debate the truth and validity of these laws in unquestionable
9a proper treatment of functions will follow

Leaving Cert Maths 15
Subtraction Rule
Consider log10 5− log10 2. − log10 2 = log10 2−1 by the multiplication rule. 2−1 = 1/2 so
log10 5− log10 2 = log10 5 + log101
2,
⇒multiplication rule
log10 5− log10 2 = log105
2.
Hence the difference of logs to a common base is the log of the division of the first number by the second.
Change of Base Law
Before the calculator era, it wasn’t easy to evaluate the likes of log3 8. However, tables for the logs to thebase of ten were compiled and the following change of base law allowed easier calculations;
log3 8 =log10 8
log10 3.
Again the following exposition is rather shaky outside an algebraic setting. To three decimal places,
log10 8
log10 3= 0.528.
⇒ log10 8 = (0.528) log10 3,
⇒multiplication rule
log10 8 = log10 30.528.
By virtue of the fact that log is a one-to-one function in the positive reals;
⇒ 8 = 3log10 8/ log10 3.
But by the definition of a log:
log3 8 =log10 8
log10 3.
1.4 What the hell is x??
Consider an equation: a mathematical statement expressing that two objects are equal, equivalent and oneand the same. As an example;
cos2 30 + sin2 30 = 1.
In mathematics there are a number of uses for this = sign. There is the common;
1 + 2 = 3,
which merely asserts that the sum of 1 and 2 is 3.Also there is the definition-type =;
33 = 3× 3× 3,
which defines 33 for example, and by extension all these positive integer powers. Finally there is the equationor formula type =, the most famous of which is probably
Energy=(mass)×(speed of light)×(speed of light)
(E = mc2).

Leaving Cert Maths 16
Hence an equation is an expression that one object is equal to the other. One side is equal to the other.Suppose now I told you that the difference between two numbers squared was the product of their respectivesum and difference, and I stacked up the evidence in front of you as so you would believe me;
52 − 22 = 21 = (5− 2)(5 + 2),
(−7)2 − 42 = 33 = (−7− 4)(−7 + 4),
152 − 82 = 161 = (15− 8)(15 + 8),
100012 − 9992 = 9999202000 = (10001− 9)(10001 + 9),
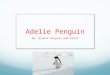
in particular negatives aren’t a problem because for example (−4)2 = (+4)2; the square of a negative numberis positive. You could say though how do you know this is true of every number, how can you prove this istrue? By going away and thinking I can demonstrate why it’s true.Theorem: The difference between two numbers squared is the product of their respective sum and difference.Proof (Geometrical): Consider the diagram:
Figure 1.3: A representation of 52 − 22; the result is the area of the shaded region.
The difference between two numbers squared is the shaded region. The yellow segment at the bottom ofthe diagram can always be moved to the top right as shown. Therefore the difference between two numberssquared is the product of their respective sum and difference. �
However quite rightly you could point out that this proof only proves the case for integers, Z. Whatabout fractions, Q? Now things are getting decidedly shaky without xs. The proof I could use is illuminatingin the sense that it uses the previous theorem to prove the case for fractions but I don’t know how to constructa proof for all real numbers. I can demonstrate the truth of the statement the difference between two numberssquared is the product of their respective sum and difference for fractions, Q (Z ⊂ Q). You may refute myclaim therefore for real numbers. This is when x kicks in. I know that any real number in R satisfies all theaxioms 1.3.2-1.3.2. The following are the axioms that rule any real numbers.

Leaving Cert Maths 17
1.4.1 The Axioms of Arithmetic in R Revisited
Closure
For any x, y ∈ R;
x+ y ∈ R,x× y ∈ R.
Commutivity
For any x, y ∈ R;
x+ y = y + x,
x× y = y × x.
Associativity
For any x, y, z ∈ R;
x+ (y + z) = (x+ y) + z,
x× (y × z) = (x× y)× z.
Identity
There is a special real number 0 ∈ R such that:
0 + x = x,
for every x ∈ R. Also there is a special number 1 ∈ R (1 = 0) such that:
1× x = x,
for every x ∈ R.
Subtraction and Division
For every number x there corresponds a number −x ∈ R such that:
x+ (−x) = 0.
Also if x = 0 there is a number x−1 ∈ R (x−1 = 1/x) such that:
x× x−1 = 1.
Distributive Law
For x, y, z ∈ R,x× (y + z) = (x× y) + (x× z).
Recall now the proof that a number multiplied by zero equals zero. Now we can reprove this algebraically- justifying each step by recourse to the axioms above:Theorem: Let x ∈ R. x× 0 = 0.Proof: x has an additive inverse −x (Inverses).
⇒ x+ (−x) = 0.
(Inverses)x = x(1) and −x = x(−1) where −1 is the additive inverse of 1. (Identity and Inverses)Now,
x(1) + x(−1) = 0.

Leaving Cert Maths 18
(Inverses)
x(1 + (−1)) = 0.
(Distributive Law)But 1 + (−1) = 0 (Inverses)
x(0) = x× 0 = 0.
�
The use of x is a sort of every-number. It can now be said that the difference between two real numberssquared is the product of their respective sum and difference because the theorem can be proved algebraically.The proof below is incredibly thorough but shows the use of the axioms. Note the notation:
x× y = x(y) = xy.
Theorem
Let x, y ∈ R;x2 − y2 = (x− y)(x+ y).
Proof:(x− y)(x+ y) = (x+ (−y))(x+ y)
(Inverses)
(x− y)(x+ y) = x(x+ y) + (−y)(x+ y)
(Distributive Law)
(x− y)(x+ y) = x2 + xy + (−yx) + (−y)(y)
(Distributive Law)
(x− y)(x+ y) = x2 + xy + (−xy) + (−1)(y)(y)
(Inverses, Commutivity and Identity)
(x− y)(x+ y) = x2 + (xy + (−xy)) + (−1)(y2)
(Associativity)
(x− y)(x+ y) = x2 − y2
(Inverses) �Again this is more than anything an exposition of proof from axioms. Suppose the question was posed
as a Leaving Cert question:
Question
Prove that for x, y ∈ R:x2 − y2 = (x− y)(x+ y). (1.4)
Ans:
(x− y)(x+ y) = x2 + xy − xy + y2,
⇒ (x− y)(x+ y) = x2 − y2.
�
You are not required to justify every step as in 1.4.1.
Hence using x and letting it stand for some real number, and manipulating it according to the axiomsof the real numbers, a result that is true of all real numbers is proven. This is very powerful. Now a briefrevisiting of powers and logs.

Leaving Cert Maths 19
1.4.2 The Laws of Indices
Let x, y ∈ R; m, n ∈ N.
(I1)xm × xn = xm+n
(I2)xm ÷ xn = xm−n
(I3)(xm)n = xmn
(I4)(xy)n = xnyn
(I5)
x−n =1
xn
(I6)x1/n = n
√x
(I7)x0 = 1
1.4.3 Definition
Let a, x ∈ R; a, x > 0.loga x = p ⇔ ap = x. (1.5)
1.4.4 Proposition
Let a, b, x, y ∈ R; a, b, x, y > 0, n ∈ R.
(L1)loga x+ loga y = loga xy
(L2)
loga x− loga y = loga
(x
y
)(L3)
n loga x = loga xn
(L4)
loga x =logb x
logb a
Proof
(L1) Let loga x = p and loga y = q:
⇒ ap = x , and aq = y
⇒ xy = apaq
⇒ xy = ap+q
⇒ loga xy = p+ q = loga x+ loga y
�

Leaving Cert Maths 20
(L2) Let loga x = p and loga y = q:
⇒ ap = x , and aq = y
⇒ x
y=
ap
aq
⇒ x
y= ap−q
⇒ loga
(x
y
)= p− q = loga x− loga y
�
(L3) Let loga x = p
⇒ ap = x
⇒ xn = apn = anp
⇒ loga xn = np = n loga x
�
(L4) Let loga x = p:
⇒ x = ap
⇒ logb x = logb ap
⇒ logb x = (loga x)(logb a)
⇒ loga x =logb x
logb a
�
Remark
Inverse

Leaving Cert Maths 21
1.5 How to put this Knowledge to Good Use in Leaving Cert?
Before quadratic and cubic equations (all polynomial equations) are examined, it is important that thisknowledge is understood to ensure competency at algebra, and prevent many of the common pitfalls facedby students who are not algebraically aware. Now whenever x or y is seen it is understood it stands for areal number.
1.5.1 Seven Deadly Sins
Squaring both Sides
Given a simple expression, sayx = y,
both sides may be squared:x2 = y2.
This is justified because if x = y and a ∈ R then ax = ay. Why?
x = y
⇒ x+ (−y) = y + (−y)
⇒ x− y = 0.
⇒ a(x− y) = 0,
⇒ ax− ay = 0,
⇒ ax− ay + ay = 0 + ay,
⇒ ax = ay.
Then,
x = y,
⇒ x2 = xy,
⇒x=y
x2 = y2.
Sin: Given the expressionx = y + z,
what aboutx2 = y2 + z2.
This is rubbish:x = y + z ; x2 = y2 + z2.
Straightaway
5 = 3 + 2, but
52 = 24 = 13 = 32 + 22.
Remedy: Given the expressionx = y + z,
it is true to say:x2 = (y + z)2. (1.6)
Taking the Root of both Sides
Given a simple expression, with x ≥ 0, sayx = y,
the root of both sides may be taken: √x =
√y.

Leaving Cert Maths 22
Sin: Given
x = y + z,?⇒√x =
√y +
√z.
This is rubbish.
25 = 16 + 9, but√25 = 5 = 7 =
√16 +
√9.
Remedy: Given the expressionx = y + z,
it is true to say: √x =
√(y + z). (1.7)
Taking the Reciprocal of both Sides
Given a simple expression, with x = 0, sayx = y,
the reciprocal of both sides may be taken:1
x=
1
y.
Sin: Given
x = y + z,
?⇒ 1
x=
1
y+
1
z.
This is rubbish.
5 = 3 + 2, but1
5= 0.2 = 0.8
.3 =
1
3+
1
2.
Remedy: Given the expressionx = y + z,
it is true to say:1
x=
1
(y + z). (1.8)
Taking the Log of both Sides
Given a simple expression, with x, > 0 sayx = y,
the log of both sides may be taken:loga x = loga y.
Sin: Given
x = y + z,?⇒ loga x = loga y + loga z.
This is rubbish.
5 = 3 + 2, but
log10 5 = 0.69897 = 0.778151 = log10 3 + log10 2.
Remedy: Given the expressionx = y + z,
it is true to say:loga x = loga (y + z). (1.9)

Leaving Cert Maths 23
Taking the Absolute Value of both Sides
Given a simple expression, sayx = y,
the absolute value of both sides may be taken:
|x| = |y|.
Sin: Given
x = y + z,?⇒ |x| = |y|+ |z|.
This is rubbish.
5 = 7 + (−2), but
|5| = 5 = 9 = |7|+ | − 2|.
Remedy: Given the expressionx = y + z,
it is true to say:|x| = |y + z|. (1.10)
Taking the cos of both Sides
Given a simple expression, sayx = y,
the cos value of both sides may be taken:cosx = cos y.
Sin: Given
x = y + z,?⇒ cosx = cos y + cos z.
This is rubbish.
90◦ = 30◦ + 60◦, but
cos 90◦ = 0 = 1
2(1 +
√3) = cos 30◦ + cos 60◦.
Remedy: Given the expressionx = y + z,
it is true to say:cosx = cos(y + z). (1.11)

Leaving Cert Maths 24
1.6 Equations
1.6.1 What is an Equation
An equation is a mathematical statement, in symbols, that two things are exactly the same (or equivalent).Equations are written with an equal sign, as in
2 + 3 = 5
9− 2 = 7
The equations above are examples of an equality: a proposition which states that two constants are equal.Equalities may be true or false. Equations are often used to state the equality of two expressions containingone or more variables. In the real numbers it can be said, for example, that for any given x ∈ R it is truethat:
x(x− 1) = x2 − x
The equation above is an example of an identity, that is, an equation that is true regardless of the values ofany variables that appear in it. The following equation is not an identity:
x2 − x = 0
It is false for an infinite number of values of x, and true for only two, the roots or solutions of the equation,x = 0 and x = 1. Therefore, if the equation is known to be true, it carries information about the value of x.To solve an equation means to find its solutions.
Many authors reserve the term equation for an equality which is not an identity. The distinction betweenthe two concepts can be subtle; for example:
(x+ 1)2 = x2 + 2x+ 1
is an identity, while:
(x+ 1)2 = 2x2 + x+ 1
is an equation, whose roots are x = 0 and x = 1. Whether a statement is meant to be an identity or anequation, carrying information about its variables can usually be determined from its context; or by makinga distinction between the equality sign (=) for a statement not true except perhaps in particular situations,and the equivalence symbol (≡) for statements know to be true without further specification. Letters fromthe beginning of the alphabet like a, b, c . . . often denote constants in the context of the discussion at hand,while letters from end of the alphabet, like x, y, z . . . , are usually reserved for the variables, a conventioninitiated by Descartes.
Properties
If an equation in algebra is known to be true, the following operations may be used to produce another trueequation:
1. Any quantity can be added to both sides.
2. Any quantity can be subtracted from both sides.
3. Any quantity can be multiplied to both sides.
4. Any nonzero quantity can divide both sides.
5. Generally, any function can be applied to both sides. (However, caution must be exercised to ensurethat one does not encounter extraneous solutions.)
The most well known system of numbers which allows all of these operations is the real numbers. However,if the equation were based on the natural numbers, for example, some of these operations (like division andsubtraction) may not be valid as negative numbers and non-whole numbers are not allowed.

Leaving Cert Maths 25
1.7 Elements of Algebra
1.7.1 Introduction
A good algebraist will keep things as simple as possible. The first thing to do is to note that properties 1& 2 and 3 & 4 of equations are equivalent. To subtract a number x is equivalent to adding a number (−x).Similarly to divide by a number x is equivalent to multiplying by a number 1/x. Hence only properties 1 &3 above will be required.
1.7.2 Simplifying Expressions
An expression in real numbers xs, ys, zs, etc. may often be simplified greatly. Because of commutativityand the distributive law of multiplication over addition; if a, b are real constants;
ax+ bx = x(a+ b) = (a+ b)x (1.12)
This means common terms can be added together to simplify an expression.
Example
Simplify3x− 2 + 2x− 4
Solution:
3x− 2 + 2x− 4
= 3x+ 2x− 2− 4
= (3 + 2)x− 6
= 5x− 6
1.7.3 Expanding Linear Products
Suppose x ∈ R and a, b, c, d are real constants. Then using the distributive law twice:
(ax+ b)(cx+ d)
= ax(cx+ d) + b(cx+ d)
= acx2 + adx+ bcx+ bd
= acx2 + (ad+ bc)x+ bd
Example
Expand(2x+ 4)(x+ 3)
Solution:
(2x+ 4)(x+ 3)
= 2x(x+ 3) + 4(x+ 3)
= 2x2 + 2x(3) + 4x+ 4(3)
= 2x2 + 6x+ 4x+ 12
= 2x2 + (6 + 4)x+ 12
= 2x2 + 10x+ 12

Leaving Cert Maths 26
1.7.4 Linear Equations
A linear equation is an equation in x of the form:
ax+ b = cx+ d (1.13)
where a, b, c, d are real constants. The equation asks the question:
For which real numbers x ∈ R is (1.13) a true statement
The first four properties of equation may be applied to (1.13) to generate new true statements. The methodimplicitly assumes that x is a solution of (1.13); i.e. it is a true statement. If the statement is thenmanipulated to generate a sequence of equations S1, S2, S3, ...,SN such that SN ≡ x = f ∈ R then f is thatreal number which makes (1.13) a true statement. Suppose x is a solution of the equation:
ax+ b = cx+ d (S1)
⇒+(−b) to both sides by property 1
ax+ (b− b)︸ ︷︷ ︸=0
= cx+ d− b (S2)
⇒+(−cx) to both sides by property 1
ax− cx = (cx− cx)︸ ︷︷ ︸=0
d− b (S3)
⇒×1/(a−c) to both sides by property 3
x (a− c)1
a− c︸ ︷︷ ︸=1
= d− b1
a− c(S4)
⇒ x =d− b
a− c(S5)
Now S5 is the true statement that x = (d − b)/(a − c); and x is the number which makes (1.13) a truestatement.
Example
Solve
1
3(x− 1) = x− 3
5x (S1)
⇒×15 to both sides by property 3
5(x− 1) = 15x− 9(x+ 2) (S2)
⇒ 5x− 5 = 15x− 9x− 18 (S3)
⇒ 5x− 5 = 6x− 18 (S4)
⇒+(5−6x) to both sides by property 1
5x− 6x = 5− 18 (S5)
⇒ (−1)x = −13 (S6)
⇒×(−1) to both sides by property 3
(−1)(−1)︸ ︷︷ ︸=1
x = (−1)(−1)︸ ︷︷ ︸=1
(13) (S7)
⇒ x = 13 (S8)
1.7.5 Addition of Algebraic Fractions
An algebraic fraction is a fraction of the form:
f(x)
g(x)

Leaving Cert Maths 27
where f(x) and g(x) are functions (expressions) in x. In ordinary arithmetic, two fractions may be writtenas a single fraction by writing each in terms of the LCM of the two denominators. That is
a
b+
c
d
=a′
LCM(b, d)+
c′
LCM(b, d)
= a′1
LCM(b, d)+ c′
1
LCM(b, d)
= (a′ + c′)1
LCM(b, d)=
a′ + c′
LCM(b, d)
where the numerators are changed so as to not change the fraction.
Example
Write as a single fraction
5
12+
3
8
=LCM(12,8)=24
10
24+
9
24
=10 + 9
24=
19
24
Note however that there is no need to find the LCM. Note in particular that for any real numbermultiplication by 1 does not change the number. The following solution is equivalent:
5
12+
3
8
=5
12
(8
8
)︸ ︷︷ ︸=1
+3
8
(12
12
)︸ ︷︷ ︸
=1
=40
96+
36
96
=40 + 36
96=
76
96=
19
24
Suppose there is a sum of two algebraic fractions. The second approach to adding 5/12 and 3/8 can be usedhere:
f1(x)
g1(x)+
f2(x)
g2(x)
=f1(x)
g1(x)
(g2(x)
g2(x)
)+
f2(x)
g2(x)
(g1(x)
g1(x)
)=
f1(x)g2(x) + f2(x)g(x)
g1(x)g2(x)
After practise one should go straight from:
f1(x)
g1(x)+
f2(x)
g2(x)
to
f1(x)g2(x) + f2(x)g(x)
g1(x)g2(x)

Leaving Cert Maths 28
Examples
Write as a single fraction:
•
1
x+ 2+
1
x+ 3
=1(x+ 3) + 1(x+ 2)
(x+ 2)(x+ 3)
=x+ 3 + x+ 2
(x+ 2)(x+ 3)
=2x+ 5
(x+ 2)(x+ 3)
•
t2
t− 2− t2
(t+ 2)
=t2(t+ 2)− t2(t− 2)
(t− 2)(t+ 2)
=t3 + 2t2 − t3 + 2t2
(t− 2)(t+ 2)
=4t2
(t− 2)(t+ 2)
1.7.6 Linear Inequalities
To solve inequalities is a similar business to solving equations. An algebraic inequality takes the form:
f(x) ≤ g(x) (1.14)
or
f(x) < g(x)
Property 3 of equations is changed however. Suppose a > 0. Then
x ≤ y
⇒ ax ≤ ay
But if a < 0, then
x ≤ y
⇒ ax ≥ ay
Property 3 for Inequalities
1. Multiplying by a positive number produces another true statement.
2. Multiplying by a negative number produces another true statement but with the inequality reversed.

Leaving Cert Maths 29
Remark: Solution Sets
In the example of a linear equation, it was found that the solution was 13. So the set of solutions to therelevant equation is the singleton set {13}. Introduce the idea of a solution set. Let P be some property.The solution set of P for x ∈ R is the set:
Solution Set of P := {x ∈ R : x has the property P} (1.15)
So for example the property of being positive, even and less than 11 has solution set {2, 4, 6, 8, 10}. It’s goodpractise to use solution sets. It ensures work is tidy and tells the marker you know what you are doing.
Examples
Solve for x.
•
3x− 7 ≤ 5 , x ∈ N⇒ 3x− 7 + 7 ≤ 5 + 7
⇒ 1
33x ≤ 1
312
⇒ x ≤ 4
⇒ Sol. Set = {1, 2, 3, 4}
•11 ≥ 3x+ 2 > −7 , x ∈ R (1.16)
This is two inequalities, namely
11 ≥ 3x+ 2 (1.17)
3x+ 2 > −7 (1.18)
(1.17) & (1.18) should be solved separately for solution sets of each, say A and B. The numbers thatsatisfy both (1.17) & (1.18) (i.e. (1.16)) is the set A ∩B.
11 ≥ 3x+ 2
⇒ 11− 2 ≥ 3x+ 2− 2
⇒ 1
39 ≥ 1
33x
⇒ x ≤ 3 = (−∞, 3]
3x+ 2 > −7
⇒ 3x+ 2− 2 > −7− 2
⇒ 1
33x >
1
3(−9)
⇒ x > −3 = (−3,∞)
Hence the solution set is the intersection:
Sol. Set = (−∞, 3] ∩ (−3,∞) = (−3, 3]
⇒ Sol. Set = {x ∈ R : −3 < x ≤ 3}
•
x2 < 24 , x ∈ Z
Note first that if x < 0, x2 > 0, so if x > 0 has x2 < 24, so will −x. Note 52 = 25 and 42 = 16. Henceas x ∈ Z
Sol. Set = {0,±1,±2,±3,±4}

Leaving Cert Maths 30
1.7.7 Factoring
Factoring is taking a sum or difference and writing it as a product. There are a multitude of reasons forfactoring. For example,
• Simplifying expressions. Often after a factorisation a simplification of a supposedly complicated objectmay be made.Example:
x2 − 9
x− 3=
(x− 3)(x+ 3)
x− 3= x+ 3 , if x = 3
• Solving quadratic equations. To solve a quadratic equation
ax2 + bx+ c = 0 (1.19)
means to find numbers that when plugged in for x solve the equation. The theorem that if a and b arereal numbers and a.b = 0 then either a = 0 or b = 0. i.e. if the quadratic can be written in the form:
(x− α)(x− β) = 0
⇒ (x− α) = 0, or (x− β) = 0
⇒ x = α, or x = β
Factoring is based on the distributive law for multiplication over addition; for all x, y, z ∈ R:
x(y + z) = xy + xz (1.20)
If there is a sum like the right-hand side of (1.20), with a factor common to both sides, it can be taken outas shown.
Examples
•
5x+ 10y
= 5(x) + 5(2y)
= 5(x+ 2y)
•
2πr2 + 2πrh
= 2πr(r) + 2πr(h)
= 2πr(r + h)
•
x2 + 7x+ 12
This is an example of a quadratic. The factorisation of quadratics is discussed in Chapter 3: Polyno-mials:
x2 + 7x+ 12
= x2 + 4x+ 3x+ 12
= x(x) + x(4) + 3(x) + 3(4)
= x(x+ 4) + 3(x+ 4)
= (x+ 4)(x+ 3)

Leaving Cert Maths 31
•
x3 + x2 + x
= x(x2) + x(x) + x(1)
= x(x2 + x+ 1)
Using the factor theorem and the formula for the roots of a quadratic (see Chapter 3: Polynomials):
x =−b±
√b2 − 4ac
2a
⇒ x =−1±
√1− 4
2
⇒ x =−1±
√−3
2
⇒ α± =−1±
√−3
2
⇒ x2 + x+ 1 = (x− α−)(x− α+)
At this point√−3 is undefined but certainly
x3 + x2 + x = x(x− α−)(x− α+)
•
12x2 + 17xy − 5y2
= 12x2 + 20xy − 3xy − 5y2
= 4x(3x) + 4x(5y)− y(3x)− y(5y)
= 4x(3x+ 5y)− y(3x+ 5y)
= (3x+ 5y)(4x− y)
•
2x2 − 19x+ 9
= 2x2 − 18x− x+ 9
= 2x(x)− 2x(9)− 1(x)− 1(−9)
= 2x(x− 9)− 1(x− 9)
= (x− 9)(2x− 1)
1.7.8 The Difference of Two Squares
For all x, y ∈ Rx2 − y2 = (x− y)(x+ y) (1.21)
Proof
(x− y)(x+ y)
= x2 + xy − xy − y2
= x2 − y2
�

Leaving Cert Maths 32
Examples
•
x2 − 16y2
= x2 − (4y)2
= (x− 4y)(x+ 4y)
•
(3x− 2y)2 − y(5y − 12x)
= 9x2����−12xy + 4y2 − 5y2 +���12xy
= 9x2 − y2
= (3x)2 − y2
= (3x− y)(3x+ y)
•
x2y2 − 162
= (xy)2 − 42
= (xy − 4)(xy + 4)
1.7.9 Grouping Terms
Let a, b, c, d, x, y ∈ R
ax+ by + cx+ dy
=xy=yx
ax+ cx+ by + dy
=x(y+z)=xy+xz
(a+ b)x+ (c+ d)y
So terms in a sum may be grouped together with like terms. If a + b = c + d then another use of thedistributive law gives:
(a+ b)x+ (c+ d)y
= (a+ b)x+ (a+ b)y
= (a+ b)(x+ y)
Examples
•
2a(x+ y) + 3(x+ y) = (2a+ 3)(x+ y)
•
16ax2 − 12a− 8x2 + 6
= 8x(2a− x)− 6(2a− x)
= (8x− 6)(2a− x)
= 2(4x− 3)(2a− x)
•
3abx2 − 5axy − 3bxy + 5y2
= 3bx(ax− y)− 5y(ax− y)
= (3bx− 5y)(ax− y)

Leaving Cert Maths 33
1.7.10 Factorisation for Simplification
Suppose f(x), g(x) are polynomials of degree n and m respectively. Consider the quotient:
f(x)
g(x)(1.22)
By the Factor Theorem f(x) and g(x) have factorisations:
f(x) = c1(x− α1)(x− α2) · · · (x− αn) (1.23)
f(x) = c2(x− β1)(x− β2) · · · (x− βm) (1.24)
where the {αi}ni=1 and {βi}mi=1 are the n/ m roots of f(x)/ g(x). If any of the αi are equal to any of the βi,say αk = βj , then those terms may be cancelled:
f(x)
g(x)=
c1(x− α1)(x− α2) · · · (x− αk) · · · (x− αn)
c2(x− β1)(x− β2) · · · (x− βj) · · · (x− βm)
⇒ f(x)
g(x)=
c1(x− α1)(x− α2) · · · (x− αn)����(x− αk)
c2(x− β1)(x− β2) · · · (x− βm)����(x− βj)× 1/����(x− αk)
1/����(x− βj)︸ ︷︷ ︸=1
Examples
•3x
3xy + 6xz=
3x
3x(y + 2z)
⇒ 3x
3xy + 6xz=
��3x
��3x(y + 2z)× 1/��3x
1/��3x︸ ︷︷ ︸=1
⇒ 3x
3xy + 6xz=
1
y + 2z
•2x2 + 5x− 3
2x2 + x− 1=
2x2 + 6x− x− 3
2x2 + 2x− x− 1
⇒ 2x2 + 5x− 3
2x2 + x− 1=
2x(x+ 3)− 1(x+ 3)
2x(x+ 1)− 1(x+ 2)
⇒ 2x2 + 5x− 3
2x2 + x− 1=
(x+ 3)����(2x− 1)
(x+ 1)����(2x− 1)× 1/����(2x− 1)
1/����(2x− 1)︸ ︷︷ ︸=1
⇒ 2x2 + 5x− 3
2x2 + x− 1=
x+ 3
x+ 1
1.7.11 Solving Equations
To solve an equation in several variablesf(a, b, c, . . . ) = 0 (1.25)
for some unknown x, the following moves are utilised to isolate the unknown x on one side, and the rest ofthe equation on the other:
Allowable Moves in Solving an Equation
1. Any quantity can be added to both sides
2. Any quantity can be multiplied to both sides
3. In general, a function can be applied to both sides
4. 0 can be added to any term
5. 1 can be multiplied by any term

Leaving Cert Maths 34
Remark
Move 3. can fall awry is many different ways; either the application of a function to both sides will yield extrasolutions that don’t solve the initial equation, or worse, the application of the function will lose solutions. Ingeneral at LC this isn’t a big problem so don’t worry about it. The following examples solve some equationsindicating the moves made.
Examples
• Solve for x:
2y =x
4− 3
⇒12y + 3 =
x
4⇒28y + 12 = x
⇒ x = 8y + 12
• Solve for b:
ab
3=
b
2+ c
⇒1
ab
3− b
2= c
⇒4
ab
3· 22− b
2· 33= c
⇒ 2ab
6− 3b
6= c
⇒ 2ab− 3b
6= c
⇒ b(2a− 3)
6= c
⇒2
b����(2a− 3)
�6·����6
2a− 3= c · 6
2a− 3
⇒ b =6c
2a− 3
• Solve for n:
p =
√m+ n
n
⇒3p2 =
m+ n
n
⇒2p2 · n =
m+ n
�n·�n
⇒1p2 · n− n = m
⇒ n(p2 − 1) = m
⇒2n����(p2 − 1) · 1
���p2 − 1= m · 1
p2 − 1
⇒ n =m
p2 − 1

Chapter 2
Functions
A function is like a black box that when fed a number x spits out another number f(x). A number x isinputted, something happens in the black box, and f(x) is the output. For every input there is a singleoutput. Say f(2) = 4 or −4; such an f is not a function. Technically, a function is a rule that associates eachnumber in a set (domain) with a single number in another set (co-domain). We usually consider functionswhere the domain and codomain are real numbers. The number f(x) is the value of f at x. The range of fis the set of all possible values of f(x) as x varies throughout the domain.
2.1 Example
f(x) = x2 is a function.
f : R → R, x 7→ x2.
Here the domain is the set of real numbers, R. The co-domain is also R. Each number in R is associatedwith a single number in R; 2 7→ 4, −1 7→ 1,
√2 7→ 2, etc. The range of f is [0,∞) - the non-negative real
numbers.
The most common method for visualising a function is its graph. If f is a function, then its graph isthe set of pairs:
graph(f) = {(x, f(x) |x ∈ R)}. (2.1)
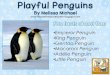
The graph of f(x) = x2 in [−1, 1]:
-1 -0.5 0.5 1x
0.2
0.4
0.6
0.8
1
f HxL
Figure 2.1: The graph of f(x) = x2.
Essentially all functions that can be encountered at LC level are continuous - that is their graph is aline that can be drawn without lifting the pen from the page.
35

Leaving Cert Maths 36
2.2 Types of Functions
Common functions include:
x
f HxL
Figure 2.2: Constant function; e.g. f(x) = 4.
x
f HxL
Figure 2.3: Linear function; e.g. f(x) = 2x+ 4.
2.3 Properties of Functions
Many questions that can be asked about such functions are answered by looking at the graph of the function.
2.3.1 Range
The range of f :Range(f) = {f(x) |x ∈ R}, (2.2)
can be easily seen from the graph of f .
2.3.2 Period of a Function
If a function f is such that:f(x+ p) = f(x), ∀x ∈ R, (2.3)
f is said to have period p. This can be seen in a graph:
2.3.3 Roots or Zeros of a Function
Let f be a function. A root or zero of f is a solution of the equation f(x) = 0. Given a graph of f(x), theset of roots of f is the set of points where f cuts the y-axis (these points are (x, 0) - the x is a root).

Leaving Cert Maths 37
x
f HxL
Figure 2.4: Quadratic function; e.g. f(x) = −6x2 + 2x+ 10.
x
f HxL
Figure 2.5: Trigonometric function; e.g. f(x) = sinx.
2.3.4 Maxima and Minima
It will soon be seen that to locate the local maxima and minima of a function f ; the equation:
f ′(x)!= 0, (2.4)
is solved for x. A graph of f also shows these local maxima and minima:

Leaving Cert Maths 38
x
f HxL
Figure 2.6: In LC, the interval between ymax and ymin, [ymin, ymax] comprises the range.
-15 -10 -5 5 10 15x
-1.5
-1
-0.5
0.5
1
1.5cosHxL
Figure 2.7: f(x) = cosx repeats itself every 2π ≈ 6.28; hence has period p = 2π
1 2 3 4x
-1.5
-1
-0.5
0.5
1
1.5
f HxL
Figure 2.8: The function f(x) = x3 − 6x2 + 11x − 6 has roots x = 1, 2, 3. This is obvious if it is notedf(x) = (x− 1)(x− 2)(x− 3) - if not the graph shows roughly where the zeros are.

Leaving Cert Maths 39
1 2 3 4x
-0.5
0.5
1
1.5
2
2.5
f HxL
Figure 2.9: This cubic function has a global maxima and mimina at the two points as shown.

Chapter 3
Polynomials
3.1 Introduction
Often in mathematics it will be required to find a root of a function
f : R → R, x 7→ f(x).
3.1.1 Definition
Let f : R → R be a function. A root of f is a number c ∈ R such that f(c) = 0.
Remark
Roots of a function therefore are the numbers that when inputted produce 0. In terms of the graph of f ,they are the points where the graph cuts the x-axis. When the graph cuts the x-axis, f = 0.
1 2 3 4x
-1.5
-1
-0.5
0.5
1
1.5
f HxL
Figure 3.1: The function f(x) = x3 − 6x2 + 11x− 6 has roots x = 1, 2, 3.
In some examples f has a simple form, which, due to the below theorem, allows us to find the roots off in a simple and obvious way.
3.1.2 Theorem
Suppose a and b are numbers anda.b = 0.
Then either a = 0 or b = 0
40

Leaving Cert Maths 41
Example
Let f(x) = x sinx. What are the roots of f in [0, π]?Solution: Solving
f(x) = 0
⇔ x sinx = 0
⇔ x = 0 or sinx = 0
⇔ x = 0 or x =π
2.
A particularly nice class of functions are polynomials.
3.1.3 Definition
Let ai ∈ R; i = 0, 1, 2, . . . , n, n ∈ N. Then any function of the form
f(x) = anxn + an−1x
n−1 + · · ·+ a2x2 + a1x+ a0 (3.1)
is a polynomial.
3.1.4 Definition
Let f be a polynomial. The greatest power of x is the degree of f .
3.2 The Roots of a Polynomial
Take a general polynomial, say f(x). How can the roots of f be found? f in general is a sum, not a product.However Theorem 3.1.2 gives us a scheme to find the roots of f - if f can be written as a product that is!To write a sum as a product is to factorise. The below theorem gives a clue:
3.2.1 Theorem: Factor Theorem
A number k is a root of a polynomial f(x) if and only if (x− k) is a factor of f .
Remark
There are two implications here. To see the first, suppose (x− k) is a factor of f . That is
f(x) = (x− k)g(x)
where g(x) is some other function in x. If x = k;
f(k) = (k − k).g(k) = 0.g(k) = 0.
i.e. f(k) is a root.The other implication is a little harder and will only be outlined here. Suppose k is a root; i.e. f(k) = 0.Write
f(x) =
n∑r=0
arxr
⇒ f(x)− f(k) =n∑
r=0
ar(xr − k2)
⇒f(k)=0
f(x) =n∑
r=0
ar(xr − kr)
As it happens (x − k) is a factor of xr − kr for all r > 0. Hence (x − k) may be taken out of the sum as acommon factor. That is (x− k) is a factor of f(x).

Leaving Cert Maths 42
For the moment suppress the restriction to real functions (x ∈ R) and consider functions defined on thecomplex numbers. It is a deep result in algebra and complex analysis that:
3.2.2 Theorem: Fundamental Theorem of Algebra
Every non-constant polynomial f of degree n can be written in the form
f(x) = c(x− a1)(x− a2) · · · (x− an) (3.2)
for some c ∈ R, a1, a2, · · · ∈ C
Remark
The ai here are the roots of f and this theorem proves that a polynomial of degree n has n roots, some ofwhich may be complex.
3.3 Quadratic Polynomials
Polynomials of degree 2 are called quadratics. This section outlines how to find the roots of quadratics. i.e.how to find the solutions to quadratic equations such as
x2 − 7x+ 10 = 0
The simplest recipe for factorisation uses the following theorem:
3.3.1 Theorem
If α and β are the roots of a quadratic equation, then the equation is
x2 − (α+ β)x+ αβ (3.3)
Remark
This means that a quadratic has form
x2 − (sum of roots)x+ (product of roots) (3.4)
Hence suppose given a quadratic f :
x2 + bx+ c
If numbers α and β can be found such that
α+ β = −b, and αβ = c (3.5)
thenf(x) = (x− α)(x− β) (3.6)
which has roots α and β according to Theorem 3.1.2.
Remark
A equivalent method for finding factors of a quadratic f is as follows. Find a re-writing of
f(x) = x2 + bx+ c
asf(x) = x2 + kx+mx+ c
such that b = k +m (so as not to change the quadratic) and km = c. Then
f(x) = x2 + kx+mx+ km
⇒ f(x) = x(x+ k) +m(x+ k)
⇒ f(x) = (x+ k)(x+m)
and the roots of f are k and m.

Leaving Cert Maths 43
Remark
The first complication here is when the coefficient of x2 is not 1. That is
f(x) = ax2 + bx+ c
where a = 1. Recall the aim of our endeavours is to find roots. The roots of f are solutions to the equation
ax2 + bx+ c = 0
Often when a = 1, then a is a common factor of a, b and c. That is a divides b and c - and in particulara. If the same operation is performed on both sides of an equation, the equation is unchanged. Divide bothsides by a:
x2 +b
ax+
c
a=
0
a= 0
⇒ x2 +b
ax+
c
a= 0
Therefore the solutions of this equation are the roots of f . Solve this in the usual way.
Sometimes the polynomial will not have simple roots and then the two techniques for finding the rootsof
f(x) = x2 + bx+ c
and the technique for finding the roots of
f(x) = ax2 + bx+ c
will not suffice. There is a formula for these cases. Of course the formula may always be used to extract thetwo roots but the above methods are preferable.
3.3.2 Theorem
A polynomial
f(x) = ax2 + bx+ c, a = 0
has roots
x =−b±
√b2 − 4ac
2a(3.7)
Remark
Examining (3.7), note that if b2−4ac < 0 then there is no (real) number equal to√b2 − 4ac as a real number
squared is always positive. The roots are said to be unreal and later it will be seen that they are complex.In this case the graph of f does not cut the x-axis at any point: If b2 − 4ac = 0 then the roots are real andequal,
x =−b± 0
2a=
b
2a
In this case the graph has as a tangent the x-axis: Finally if b2−4ac > 0 then the roots are real and distinct.In this case the function cuts the x-axis at two points:

Leaving Cert Maths 44
-2 0 2 4x
2
4
6
8
10
f HxL
Figure 3.2: The function f(x) = x2 − x+ 4 has no real roots.
-2 0 2 4x
2
4
6
8
10
f HxL
Figure 3.3: The function f(x) = x2 − x+ 1/4 has two equal, real roots.
3.4 Cubic Polynomials
Generally the factor theorem is used to find the roots of a cubic polynomial f(x). Find a root of f by trialand error, say x = k (usually in this case x = 0,±2,±2 ± 3 will proffer a root). Then by the factor theorem,(x− k) is a root. By the Fundamental Theorem of Algebra, a cubic f has form:
f(x) = c(x− k1)(x− k2)(x− k3)
so division by (x− k) where k is a root leaves f as
f(x) = (x− k)× (c(x− α)(x− β))
i.e. (x− k)× a quadratic. The factors of the quadratic may be found as above and sure enough f has rootsk, α and β.

Leaving Cert Maths 45
-4 -2 2 4 6 8x
10
15
20
25
30
35
f HxL
Figure 3.4: The function f(x) = x2 − 4x+ 1 has two distinct, real roots.
3.5 Exercises
Find the roots of these polynomials. Substitute your answers for x and evaluate f(x). If this is zero you arecorrect.
1. x2 − 4x− 5
2. x2 − 4x− 6
3. 2x3 + x2 − 8x− 4

Chapter 4
Complex Numbers
4.1 Introduction
Consider a quadratic function in x; x2+ bx+ c. It has been shown that a quadratic function has two factors:
f(x) = (x− α)(x− β) (4.1)
and hence two roots, x+ = α, x− = β say, given by:
x± =−b±
√b2 − 4ac
2a(4.2)
In terms of a picture, the roots of a quadratic are the two points where the graph of f cuts the x-axis:
-1 1 2 3 4
-1
1
2
3
4
5
Figure 4.1: A graph of f(x) = x2 − 3x+ 2. Where the graph cuts the x-axis the function has value 0. Thepoints where this happens are roots of f(x). In this case x = 1 and x = 2.
46

Leaving Cert Maths 47
However, things are more complicated when the graph does not cut the x-axis. For example:
-1 1 2 3 4
-1
1
2
3
4
5
Figure 4.2: A graph of f(x) = x2 − 3x+ 3 does not cut the x-axis: f(x) has no real roots.
Where have the roots gone? Consider the quadratic g(x) = x2 + 1. What are the roots of g, the valuesthat make g = 0?
g(x) = 0
⇔ x2 + 1 = 0
⇔ x2 = −1
However no real number satisfies x2 = −1; because the square of a real number is always positive (or 0). Ifi is defined as that special object such that i2 = −1, then a special set (or algebra), the complex numbers,C, may be constructed which has a similar algebraic structure to that of the real numbers, R. The twoprominent differences between the two algebras are
1. C is algebraically closed - every polynomial with complex coefficients has roots in C. This is not thecase in R. For example, g(x) = x2 +1 has coefficients in R, namely 1 and 1, but no root or solution inR.
2. C may not be totally ordered in a way compatible with arithmetic. Given z1, z2, it is impossible tohave a well defined ‘≤’ which states z1 ≤ z2 and vice versa. In contrast, two real numbers x, y willeither have x ≤ y or y ≤ x in the obvious sense.
Although other notations can be used, complex numbers are usually written in the form
z = a+ bi (4.3)
where a and b are real numbers. The real number a is called the real part of the complex number, and thereal number b is the imaginary part. For example, 3+2i is a complex number, with real part 3 and imaginarypart 2. If z = a+ bi, the real part a is denoted Re(z), and the imaginary part b is denoted Im(z). The realnumbers, R, may be regarded as a subset of C by considering every real number as a complex number withan imaginary part of zero; that is the real number a is identified with the complex number a+ 0i. Complexnumbers with a real part of zero are called imaginary numbers; instead of writing 0 + bi, that imaginarynumber is usually denoted as just bi. Two complex numbers are said to be equal if and only if their realparts are equal and their imaginary parts are equal.
4.2 The Construction of C4.2.1 Complex Numbers as Points on the Plane
If the complex number z = a + bi is associated with the point on the plane, (a, b), then the operations ofaddition and multiplication of complex numbers may be defined as
(a, b) + (c, d) = (a+ c, b+ d) (4.4)
(a, b) · (c, d) = (ac− bd, bc+ ad) (4.5)

Leaving Cert Maths 48
This means we can associate the numbers (a, 0) with the real numbers, and write i = (0, 1). Since(0, 1)(0, 1) = (−1, 0), i has been found by construction, and the only important point is that it has thespecial property that:
(0, 1)(0, 1) = (−1, 0)
⇔ i · i = i2 = −1
Using these formal operations on points on the plane, it is easy to check that the axioms of arithmetic(associativity, commutativity, identity, inverses, distributivity) are satisfied. A complex number viewed asa point or position vector in a two-dimensional Cartesian coordinate system is called the complex plane orArgand diagram, named after Jean-Robert Argand. The numbers are conventionally plotted using the realpart as the horizontal component, and imaginary part as the vertical:
Figure 4.3: This Argand Diagram shows z = a+ bi, Re(z) and Im(z) plotted geometrically.
4.2.2 Operations More Intuitively
Complex numbers can be intuitively added, subtracted, multiplied, and divided by applying the associative,commutative and distributive laws of algebra, together with the equation i2 = −1. The notation z = a+ biis well-designed, since proceeding to manipulate the symbols purely intuitively gives:
(a+ bi) + (c+ di) = (a+ c) + (b+ d)i (4.6)
(a+ bi)(c+ di) = ac+ bci+ adi+ bdi2 = (ac− bd) + (bc+ ad)i (4.7)
The fact that this agrees with the definition justifies this sort of manipulation, by indirectly deriving thedistributive law, and so on. Subtraction and division are found from these two by working backwards. Inthe case of subtraction, u− w means u plus the number which cancels out w (its additive inverse), giving
(a+ bi)− (c+ di) = (a− c) + (b− d)i (4.8)

Leaving Cert Maths 49
Multiplicative Inverse and Division
For multiplication, the inverse of z = c+ di is found to be
z−1 =1
z=
(c
c2 + d2
)−(
d
c2 + d2
)i (4.9)
when c and d are not both zero (like in R, 0 = 0 + 0i has no inverse, no 1/0). This is found by solvingfor x+ yi in (x+ yi)(c+ di) = 1. First note in particular that:
(a+ bi)(a− bi) = a2(((((−abi+ abi− b2 i2︸︷︷︸=−1
⇒ (a+ bi)(a− bi) = a2 + b2
Thence
x+ iy =1
c+ di
⇒ x+ iy =1
c+ di.c− di
c− di
⇒ x+ iy =c− di
c2 + d2
which then yields
a+ bi
c+ di= (a+ bi).
1
c+ di= (a+ bi).
c− di
c2 + d2
⇒ a+ bi
c+ di=
ac− adi+ bci+ bd
c2 + d2
⇒ a+ bi
c+ di=
(ac+ bd
c2 + d2
)+
(bc− ad
c2 + d2
)i
If the symbols are manipulated intuitively, so that
a+ bi
c+ di=
a+ bi
c+ di· c− di
c− di︸ ︷︷ ︸=1
⇒ a+ bi
c+ di=
ac+ bci− adi+ bd
c2 + d2
⇒ a+ bi
c+ di=
(ac+ bd
c2 + d2
)+
(bc− ad
c2 + d2
)i
the formula agrees with the one just derived. In fact, once the gaps are filled in, all the usual rules ofsimple arithmetic on real numbers can be shown to work when the symbols are appropriately swapped forcomplex numbers.
4.3 Modulus and Conjugation of Complex Numbers
4.3.1 Modulus
Let z = a + bi be a complex number. The modulus of z, |z| is the distance from z to the origin. UsingPythagoras Theorem and considering Figure 4.3:
|z| =√
a2 + b2 (4.10)
4.3.2 Conjugation
Define the conjugate of z = x+ iy to be x− iy, written as or z . Both z + z and z · z are real numbers. z isthe image of z under axial symmetry in the real axis:
If z = a+ bi:
(a+ bi)(a− bi) = a2 + b2
⇒ z · z = a2 + b2 = |z|2

Leaving Cert Maths 50
Figure 4.4: This Argand Diagram shows z = a+ bi and its conjugate: z = a− bi.
4.3.3 Proposition
Let z = a+ bi, w = c+ di ∈ C. Then
(i)z + w = z + w
(ii)z.w = z.w
(iii)kz = kz, ∀ k ∈ R
(iv)k = k ∀, k ∈ R
Proof
(i)
z + w = a+ bi+ c+ di
⇒ z + w = (a+ c) + (b+ d)i
⇒ z + w = (a+ c)− (b+ d)i
⇒ z + w = a− bi+ c− di
⇒ z + w = z + w
�
(ii)
z.w = (a+ bi)(c+ di)
⇒ z.w = ac+ adi+ bci− bd
⇒ z.w = (ac− bd) + (bc+ ad)i
⇒ z.w = (ac− bd)− (bc+ ad)i
and
z.w = (a− bi)(c− di)
⇒ z.w = ac− adi− bci− bd
⇒ z.w = (ac− bd)− (bc+ ad)i = z.w

Leaving Cert Maths 51
(iii)
kz = k(a+ bi)
⇒ kz = ka+ kbi
⇒ kz = ka− kbi
⇒ kz = k(a− bi) = kz
�
(iv)
k = k + 0i
⇒ k = k − 0i = k
�
4.3.4 Theorem: Conjugate Root Theorem
If w is a root off(z) = anz
n + an−1zn−1 + · · ·+ a2z
2 + a1z + a0 (4.11)
where ai ∈ R then so is w; i.e. if f(w) = 0 ⇒ f(w) = 0
Proof
If w is a root of f :
f(w) = anwn + an−1w
n−1 + · · ·+ a2w2 + a1w + a0 = 0
⇒ anwn + an−1wn−1 + · · ·+ a2w2 + a1w + a0 = 0
⇒ anwn + an−1wn−1 + · · ·+ a1w + a0 = 0
⇒ anwn + an−1wn−1 + · · ·+ a1w + a0 = 0
⇒ anwn + an−1w
n−1 + · · ·+ a1w + a0 = 0
⇒ f(w) = 0
∴ w is a root of f . �
Remarks
Note this theorem only applys when the coefficients are real. For example, 1 + i is a root of
f(z) = z2 − (3− i)z + 4
but 1− i is not. The coefficient of z1 is not real; 3− i ∈ R.
4.3.5 Corollary
1. A quadratic functionf(z) = az2 + bz + c (4.12)
has either two real roots or two complex roots.
2. A cubic functiong(z) = az3 + bz2 + cz + d (4.13)
as either one real root (and two complex roots) or three real roots
3. A polynomial of odd degree has at least one real root

Leaving Cert Maths 52
Figure 4.5: z in Cartesian coordinates.
Figure 4.6: z in polar coordinates. Clearly r = |z| and θ =: arg(z) = arctan(b/a)
4.4 Polar Coordinates
Consider the following:An alternate (unique) representation of z is as follows:Suppose z = a+ bi. Then z = (r, θ) = (|z|, arg(z)) where
arg(z) =
arctan(b/a) if Re(z) > 0, Im(z) > 0 i.e. z in quadrant 1
π − arctan(−b/a) if Re(z) < 0, Im(z) > 0 i.e. z in quadrant 2
π + arctan(b/a) if Re(z) < 0, Im(z) < 0 i.e. z in quadrant 3
2π − arctan(b/a) if Re(z) > 0, Im(z) < 0 i.e. z in quadrant 4
(4.14)
Suppose z = (r, θ). Then z = r(cos θ + i sin θ).
4.4.1 De Moivre’s Theorem for Integers
If z = r(cos θ + i sin θ), then ∀n ∈ Zzn = rn(cosnθ + i sinnθ) (4.15)

Leaving Cert Maths 53
Proof
De Moivre’s Theorem for n ∈ NLet P (n) be the proposition that
(r(cos θ + i sin θ))n= rn(cosnθ + i sinnθ) (4.16)
((r(cos θ + i sin θ))0= 1
r0(cos 0θ + i sin 0θ)
= cos 0 + i sin 0 = 1
Hence P (1) is true.Assume now that P (k) is true:
(r(cos θ + i sin θ))k= rk(cos kθ + i sin kθ)
⇒ (r(cos θ + i sin θ))k+1
= (r(cos θ + i sin θ))k(r(cos θ + i sin θ))
⇒ (r(cos θ + i sin θ))k+1
= rk(cos kθ + i sin kθ) (r(cos θ + i sin θ))
⇒ (r(cos θ + i sin θ))k+1
= rk+1[cos kθ cos θ + i sin kθ cos θ + i cos kθ sin θ − sin kθ sin θ]
⇒ (r(cos θ + i sin θ))k+1
= rk+1[cos kθ cos θ − sin kθ sin θ + i sin kθ cos θ + i cos kθ sin θ]
⇒cos(A+B)=cos cos− sin sin; sin(A+B)=sin cos+ cos sin
(r(cos θ + i sin θ))k+1
= rk+1[cos(kθ + θ) + i sin(kθ + θ)]
⇒ (r(cos θ + i sin θ))k+1
= rk+1[cos(k + 1)θ + i sin(k + 1)θ]
By induction, P (n) is true for all n ∈ N. That is De Moivre’s Theorem is true for all n ∈ N.
De Moivre’s Theorem for n ∈ ZThe theorem has been shown for n ∈ N. Let m ∈ Z/N = −n ∈ N; i.e. m < 0:
zm = z−n =1
zn
⇒ zm =1
[r(cos θ + i sin θ)]n
⇒ zm =1
[rn(cosnθ + i sinnθ)]
⇒ zm =1
rn.
1
(cosnθ + i sinnθ)
⇒ zm =1
rn.
1
(cosnθ + i sinnθ).cosnθ − i sinnθ
(cosnθ − i sinnθ)︸ ︷︷ ︸=1
⇒ zm = r−n cosnθ − i sinnθ
cos2 nθ + sin2 nθ
⇒sin2 +cos2=1
zm = r−n(cosnθ − i sinnθ)
⇒cos(−A)=cosA, sin(−A)=− sinA
r−n(cos(−nθ) + i sin(−nθ))
⇒m=:−n
zm = rm(cosmθ + i sinmθ)
�
Remark
This allows us to easily objects like (a+ bi)n (e.g. (1 + i)10). Let z = a+ bi; z = (r, θ) = (|z|, arg) (|z| andarg(z) are easy to calculate):
zn = r(cos θ + i sin θ)n
⇒ zn = rn(cosnθ + i sinnθ)

Leaving Cert Maths 54
Remark
De Moivre’s Theorem has been proven for the integers, Z. However this Theorem is also true for fractions,Q.
4.4.2 Corollary
cos 2A = cos2 A− sin2 A (4.17)
sin 2A = 2 sinA cosA (4.18)
Proof
(cosA+ i sinA)2 = cos 2A+ i sin 2A
⇒ cos 2A+ i sin 2A = cos2 A+ 2i sinA cosA− sin2 A
⇒ cos 2A+ i sin 2A = cos2 A− sin2 A+ i sinA cosA
⇒ cos 2A = cos2 A− sin2 A , and
sin 2A = 2 sinA cosA
�
4.5 Roots of Complex Numbers
4.5.1 Cubic Roots of Unity
The taking of roots of complex numbers, e.g. solve zn = a + ib is a tricky question. The question hasn’tcome at LC level since 2003 when the cubic roots of unity were examined so we study these here. Beforethat the topic was examined in 1999 & 1997. The Fundamental Theorem of Algebra 3.2.2 states that everypolynomial over the complex numbers of degree n has n roots. These roots may be repeated but there willbe n counting repeated roots. Consider the roots of the polynomial
f(z) = z3 − 1 (4.19)
This question asks ‘which’ number when cubed produces 1; and in the real numbers the unique solution is3√1 = 1. However the Fundamental Theorem of Algebra tells us that f(z) has three roots - there are three
cubic roots of unity (1). These can be found by the factor theorem. f(1) = 0 so z − 1 is a factor of f(z):
f(z) = (z − 1)g(z) (4.20)
where g(z) is some quadratic - whose roots may be found by formula. Alternatively De Moivre’s Theoremmay be used. To find roots of f(z) is to find numbers w ∈ C such that f(w) = 0 ⇔ w3 = 1. Take both sidesto the power 1/3:
w = 11/3
Now in polar form 1 = cos 0 + i sin 0. However as angles 360◦ ≡ 0 - if I make a full revolution I may as wellnot rotate at all. Thence 0 ≡ 0 + n× 360◦, where n ∈ Z - adding multiples of 360◦ gives equivalent angles.In terms of radians 360◦ = 2π so
1 = cos 2nπ + i sin 2nπ (4.21)
Using De Moivre’s Theorem:
w = (cos 2nπ + i sin 2nπ)1/3
⇒ w = cos2nπ
3+ i sin
2nπ
3
Now if f(z) has three roots and three are found that is all there is. Hence as n ∈ Z let n = 0, 1, 2, . . . to findsolutions until three are found.

Leaving Cert Maths 55
1. n = 0
w = cos 0 + i sin 0 = 1
2. n = 1
w = cos2π
3+ i sin
2π
3w = − cosπ/3 + i sinπ/3
⇒ w = −1
2+
√3
2i
If we are being smart we may realise we are done here because f(z) is a polynomial with real coefficients.By the Conjugate Root Theorem, if w is a root, so is w and so
−1
2−
√3
2i
is the third root. However in general at LC the relevent polynomial will not have all real coefficientsand we must continue our search through n = 0, 1, . . . .
3. n = 2
w = cos−2π
3− i sin
2π
3⇒ w = − cosπ/3− i sinπ/3
⇒ w = −1
2−
√3
2i

Chapter 5
Matrices
5.1 Introduction
5.1.1 Definition
A matrix is a rectangular area of numbers in a bracket.
Examples
A =
(1 0
2.6 −8
)
B =
(1
0
)
C =
(1 0 3
−16 0√26
)
Remarks
1. A matrix with n rows and m columns is said to have dimension n ×m or be an n ×m matrix. Forexample, A is a 2× 2 matrix; B is a 2× 1 matrix, and C is a 2× 3 matrix.
2. A square matrix is an n× n matrix.
5.1.2 Addition of Matrices
Two matrices of equal dimension may be added together to produce another matrix of the same dimension.This sum is a matrix whose elements are obtained by adding corresponding elements.(
a b
c d
)+
(e f
g h
)=
(a+ e b+ f
c+ g d+ h
)
5.1.3 Scalar Multiplication of a Matrix
Any matrix may be multiplied by a scalar (some k ∈ R) by multiplying each element by the number.
k
(a b
c d
)=
(ka kb
kc kd
)
56

Leaving Cert Maths 57
5.1.4 Equality of Matrices
Two matrices are equal as matrices if they have same dimension and each corresponding element is equal.
Example
Suppose
A =
(a b
c d
), and
B =
(1 0
2.6 −8
)
and one is told A = B. Thence
a = 1,
b = 0,
c = 2.6,
d = −8
5.2 Multiplication of Matrices
5.2.1 Definition
A matrix A is conformable with a matrix and B if the dimension of A is n × k and the dimension of B isk ×m for some k ∈ N.
Remarks
1. In LC, only a notion of multiplication between conformable matrices is considered. In this case theproduct of an n× k matrix and a k ×m matrix is a n×m matrix.
2. This means that a matrix A may be multiplied by a matrix B to form the product AB if and only ifthe number of columns in A is equal to the number of rows in B.
3. Note also that if A is conformable with B it does not follow that B is conformable with A. For example,a 2× 3 matrix be multiplied by a 3× 4 matrix to produce a 2× 4 matrix but a 3× 4 matrix may notbe multiplied by a 2× 3 matrix
4. Two square matrices of equal dimension may be multiplied together to produce another square matrixof the same dimension. However note that the order of multiplication is important. It will be seen ingeneral that for square matrices A and B;
AB = BA (5.1)
That is the axiom of commutivity for real numbers xy = yx, ∀x, y ∈ R; fails in general for an algebraof matrices.

Leaving Cert Maths 58
5.2.2 Definition
Let A := [A]ij = aij of dimension n× r ; and B := [B]ij = bij of dimension r×m. Then the matrix productAB = C = [C]ij has matrix entries
cij =r∑
k=1
aikbkj (5.2)
Remarks
This is the technical definition for any two conformable matrices A and B. The meaning of (5.2) will bediscussed for the general case of two conformable matrices; and for the cases of n×m matrices with n,m ≤ 2.
(i) The General Case;Let A be a n × r matrix and B be a r ×m matrix. What are the entries of C = AB? Well take thegeneral entry that is in the i-th row and j-th column of C. This is the number cij . This is by (5.2):
cij = ai1b1j + ai2b2j + ai3b3j + · · ·+ airbrj
So to find the (ij)-th element sum the numbers along the i-th row of A multiplied by the numbersalong the j-th column of B:
i
j cij
︸ ︷︷ ︸
C
=i
• • • •
︸ ︷︷ ︸
A
j
•
•
•
•
︸ ︷︷ ︸
B
I admit this is not the easiest thing to grasp but luckily at LC level only multiplication among n×mmatrices for n,m ≤ 2 is examinable; and (5.2) may be written explicitly for the three relevant cases.
(ii) A 1× 2 matrix by a 2× 1 matrix.
(a b
)( c
d
)= (ac+ bd) (5.3)
Note a 1 × 2 matrix by a 2 × 1 matrix is a 1 × 1 matrix. This is equivalent to a real number; in thiscase ac+ bd.
(iii) A 1× 2 matrix by a 2× 2 matrix.
(a b
)( x y
z w
)=(ax+ bz ay + bw
)(5.4)
Note a 1× 2 matrix by a 2× 2 matrix is a 1× 2 matrix.
(iv) A 2× 2 matrix by a 2× 1 matrix.(x y
z w
)=(ax+ bz ay + bw
)( a
b
)=
(ax+ by
az + bw
)(5.5)
Note a 2× 2 matrix by a 2× 1 matrix is a 2× 1 matrix.
(v) (a b
c d
)(e f
g h
)=
(ae+ bg af + bh
ce+ dg cf + dh
)

Leaving Cert Maths 59
Whenever stuck this is how it can be done algorithmically:
C = AB =
1st row by 1st column 1st row by 2nd column · · · 1st row by last column
2nd row by 1st column 2nd row by 2nd column · · · 2nd row by last column
last row by 1st column last row by 2nd column · · · last row by last column
(5.6)
5.3 The Eigenvalue Problem
Consider the following:
Figure 5.1: The action of a matrix on the basis vectors.
Let A be the matrix as shown. The points (0, 0), (0, 1), (1, 0) and (1, 1) are vectors and may berepresented by 2× 1 matrices as shown. A 2× 2 matrix is a function from the set of vectors (2× 1 matrices)into itself (As a 2 × 2 matrix by a 2 × 1 matrix is another 2 × 1 matrix). A question that may be asked isas follows:
Given a square matrix A, for what non-zero vectors will the matrix have the action of scaling(stretching) the vector?
(The Eigenvalue Problem)
Figure 5.2: Given a square matrix A; the Eigenvalue Problem asks which non-zero vectors (x, y) are scaled?

Leaving Cert Maths 60
Formally, this question asks, at LC level; given a 2 × 2 matrix A, find real numbers λ such that thereexist vectors v such that
Av = λv (5.7)
That is (a b
c d
)(x
y
)= λ
(x
y
)
⇒
(ax+ by
cx+ dy
)=
(λx
λy
)
Given (x, y), λ may be found by comparing matrix entries. If λ is given, the solution of the simultaneousequations
ax+ by = λx , and (5.8)
cx+ dy = λy (5.9)
yields the eigenvector (x, y) associated with λ.
5.4 The Multiplicative Inverse of a Number
In arithmetic in R, every non-zero number x has a multiplicative inverse x−1 given by the number 1/x withthe property:
x× x−1 = 1 = x−1 × x (5.10)
where ‘1’ is the multiplicative identity with the special property that for all x ∈ R:
1× x = x = x× 1 (5.11)
There is a special matrix I that is a multiplicative identity for matrix multiplication:(a b
c d
)(1 0
0 1
)=
(a b
c d
)=
(1 0
0 1
)(a b
c d
)(5.12)
That is I is a matrix such that for any matrix A:
AI = A = IA (5.13)
A natural question to ask is given a matrix A; does there exist a matrix A−1 such that:
A×A−1 = I = A−1 ×A? (5.14)
5.4.1 Definition
Given a matrix (a b
c d
)
the determinant of A is the number:detA = ad− bc (5.15)
5.4.2 Definition
Given a matrix A (detA = 0), the (multiplicative) inverse of A, A−1 is the matrix
1
detA
(d −b
−c a
)(5.16)

Leaving Cert Maths 61
5.4.3 Proposition
A×A−1 = I = A−1 ×A (5.17)
Proof (Non-Examinable):
A−1A =1
detA
(d −b
−c a
)(a b
c d
)
⇒ A−1A =1
ad− bc
(ad− bc bd− bd
−ac+ ac −bc+ ad
)
⇒ A−1A =1
ad− bc
(ad− bc 0
0 ad− bc
)
⇒ A−1A =
(1 0
0 1
)= I
Similarly it may be shown A×A−1 = I. �
5.4.4 Definitions
A square matrix A is invertible if detA = 0.A square matrix A is singular if detA = 0.
Remark
It has been shown that an invertible matrix has an inverse. A singular matrix A does not have an inversedefined by Definition 5.4.2 as 1/detA is not defined if ad − bc = 0 ⇔ A is singular. Suppose that given asingular matrix A there does exist a matrix B such that
AB = I
Now if detA = 0;
ad− bc = 0
⇒ ad = bc
⇒ b
a=: α :=
d
c
⇒ A =
(p αp
q αq
)Now let
B =
(x y
z w
)
⇒ AB =
(p αp
q αq
)(x y
z w
)
⇒ AB =
(px+ αpz py + αpw
qx+ αqz qy + αqw
)Now if AB = I;
⇒
(px+ αpz py + αpw
qx+ αqz qy + αqw
)=
(1 0
0 1
)

Leaving Cert Maths 62
Comparing entries (1, 1) and (2, 1);
px+ αpz = 1 , and
qx+ αqz = 0
⇒ x+ αz =1
p, and
⇒ x+ αz = 0
which is impossible as p = 0 1.To understand singular matrices geometrically consider the following:
Figure 5.3: This singular matrix maps the two dimensional plane into the a dimensional line. A :∏
→ Lmaps points on the plane
∏to points on the line L by but there does not exist A−1 : L →
∏that maps
points on the line uniquely to points on the plane.
A matrix sends vectors (points in the plane) to other points. Suppose a matrix sends the point (x.y)to the point (x′, y′). Then the inverse matrix would send the point (x′, y′) back to (x, y). A singular matrix,however, sends some points to the same point. For example the singular matrix in Figure 5.3:(
2 1
4 2
)(1
0
)=
(2
4
), and
(2 1
4 2
)(0
2
)=
(2
4
)
To construct an inverse for this matrix would be to construct a matrix that would send one point (2, 4) toat least two points (1, 0) and (2, 0). Hence a singular matrix can in no sense have an inverse - via Definition5.4.2 or otherwise.
1There are a few other possibilities that allow these to be true however any such supposition also leads to a contradiction;e.g. p = 0 ⇒ A = 0 the zero matrix which is trivially singular as A0 = 0 = 0A for any A.

Leaving Cert Maths 63
Remark: Non-Examinable
It can be shown that given a matrix A, a real number λ is an eigenvalue of A if and only if A−λI is singular.That is if the determinant of A− λI is zero:
A− λI =
(a− λ b
c d− λ
)⇒ det(A− λI)
!= 0
⇒ (a− λ)(d− λ)− bc = 0
This is a quadratic equation in λ which implies there are two solutions. In general, an n × n matrix has neigenvalues.
5.4.5 Matrix Equations
Consider the simple problem in real arithmetic: given a > 0, b ∈ R, find x ∈ R such that:
ax = b
To find x simply multiply both sides by a−1 = 1/a:
a−1a︸ ︷︷ ︸=1
x = a−1b
⇒ x = a−1b =b
a
Now if a = 0, this equation only has solutions if b = 0 also; in which case there are an infinite number ofsolutions; indeed any x ∈ R satisfies
0× x = 0
Also if a = 0 and b = 0 there are no solutions to the equation.
The analogous question in matrix algebra is given matrices A and C; find a matrix B such that
AB = C
At LC level A shall always be invertible so if A−1 is found, then cross multiplication by A−1 yields:
B = A−1C
Remark
In drawing the comparison between arithmetic in R and matrix algebra note the two special numbers 0,1 ∈ R have the properties, ∀x ∈ R:
1× x = x = x× 1 (5.18)
0 + x = x = x+ 0 (5.19)
The role of 0 and 1 is similarly played by 0 and I in matrix algebra; for all matrices A:
IA = A = AI (5.20)
0+A = A = 0 (5.21)
On reading section 5.4.5 one might make the mistake that the analogue of 0 ∈ R in matrix algebra is asingular matrix. This is not the case. This mistake is made because 0 is the unique singular element in 0 -the unique element without an inverse 0−1 such that:
0× 0−1 = 1 (5.22)

Leaving Cert Maths 64
5.5 Diagonal Matrices
Finally a diagonal matrix is a matrix of the form:
D =
(a 0
0 b
)(5.23)
Diagonal Matrices have two nice properties. They commute with any other matrix diagonal matrix E:ED = DE; and the powers of D have a nice form.
5.5.1 Proposition
Diagonal Matrices are commutative
Proof (Not Examinable):
Let
E =
(x 0
0 y
)
⇒ DE =
(a 0
0 b
)(x 0
0 y
)
⇒ DE =
(ax 0
0 by
), and
ED =
(ax 0
0 by
)⇒ DE = ED
�
Remark
In R, all elements are commutative, ∀x, y ∈ R:
xy = yx (5.24)

Leaving Cert Maths 65
5.5.2 Proposition
For a diagonal matrix, D, and n ∈ N, if
D =
(a 0
0 b
)
Dn =
(an 0
0 bn
)
Proof (Not Examinable):
The proof is by induction. Let P (n) be the proposition that
Dn =
(an 0
0 bn
)
Clearly P (1) is true. Assume P (k) is true:
⇒ Dk =
(ak 0
0 bk
)
Dk+1 =
(a 0
0 b
)k+1
⇒ Dk+1 =
(a 0
0 b
)1(a 0
0 b
)k
⇒P (k) is true
Dk+1 =
(a 0
0 b
)(ak 0
0 bk
)
⇒ Dk+1 =
(a× ak 0
0 b× bk
)
⇒ Dk+1 =
(ak+1 0
0 bk+1
)
That is P (k + 1) is true. Hence by induction P (n) is true ∀n ∈ N. �

Chapter 6
Limits
6.1 What is a Limit?
Take the function f : x 7→ 2x+ 1.
f(4) = 2(4)+1 = 9f(4.8) = 2(4.8)+1 = 10.6f(4.9) = 2(4.9)+1 = 10.8f(4.999) = 2(4.999)+1 = 10.998
It is clear that as x gets closer and closer to 5, f(x) gets closer to 11. This statement can be written inmathematical form:
limx→5
(2x+ 1) = 11, or
limx→5
f(x) = 11.
However this is no surprise as f(5) = 11.
Now consider the function g :
g(x) =x− 2
x2 − 4.
What is
limx→2
x− 2
x2 − 4?
In other words, as x gets closer and closer to 2, what will g(x) get closer and closer to? The problem in thiscase is that g(2) = 0/0, which is undefined. To find the limit the rough and ready approach may be used,and then the proper mathematical approach.
6.1.1 Rough and Ready Approach
x g(x)
1 0.33331.5 0.28571.8 0.26321.9 0.25641.99 0.25061.999 0.2501
66

Leaving Cert Maths 67
6.1.2 Mathematical Approach
It would appear that as x approaches 2, g(x) approaches 0.25. This can be proven in the following mathe-matical method:
limx→2
x− 2
x2 − 4,
= limx→2
(x− 2)
(x− 2)(x+ 2),
= limx→2
1
(x+ 2),
=1
4.
Ordinarily the (x− 2)s here would not be cancelled if x = 2; but the limit as x → 2 means that x is as closeto 2 as doesn’t matter, but does not equal 2. Hence (x− 2)/(x− 2) is not 0/0 in the limit; but 1. The fact:
limx→2(x− 2)
limx→2(x− 2)= lim
x→2
(x− 2)
(x− 2)= lim
x→21 = 1, (6.1)
is used. This uses one of the Laws of Limits. They are presented below.
1 2 3 4x
0.1
0.2
0.3
0.4
0.5
gHxL
Figure 6.1: g(x) is undefined at x = 2; but limx→2 = 1/4. This is clear in the graph of g.
6.1.3 Laws of Limits
(Lim1)limx→a
(f(x)± g(x)) = limx→a
f(x)± limx→a
g(x). (6.2)
Example
limx→0
(cosx+ x2),
= limx→0
cosx+ limx→0
x2,
= 1 + 0 = 1.
(Lim2)limx→a
(f(x).g(x)) = limx→a
f(x). limx→a
g(x). (6.3)

Leaving Cert Maths 68
Example
limx→2
(x2 − 4) = limx→2
(x− 2). limx→2
(x+ 2) = 0(4) = 0.
(Lim3)
limx→a
f(x)
g(x)=
limx→a f(x)
limx→a g(x). (6.4)
Example
limx→1
5x2
x=
limx→1 5x2
limx→1 x=
5
1= 5.
(LimL’H) Suppose f(x) and g(x) are functions such that either
1. f(a) = 0 and g(a) = 0, or
2. f(a) = ∞ and g(a) = ∞.
Then
limx→a
f(x)
g(x)= lim
x→a
f ′(x)
g′(x). (6.5)
(L’Hospital’s Rule)
Example
As before, let
f(x) =x− 2
x2 − 4
What is the limit of f as x → 2? Let u(x) = x − 2 and v(x) = x2 − 4. Then f(x) = u(x)/v(x) butu(2) = 0 = v(2), hence L’Hospital’s Rule may be used.
u′(x) = 1,
v′(x) = 2x.
Hence
limx→2
f(x) = limx→2
u′(x)
v′(x)= lim
x→2
1
2x=
1
4.
This rule can be very useful and is not in the textbook so remember it - it can come in very handy!
In particular, the proper way to use limits is required when doing differentiation from first principles.Suppose given
f ′(x) = limh→0
f(x+ h)− f(x)
h, (6.6)
that f is such that
f ′(x) = limh→0
2h+ h2
h.
We know now that the hs can be cancelled (division by h) as h → 0, but h = 0 (division by zero is notdefined). Hence
f ′(x) = limh→0
1/h
1/h
2h+ h2
h= lim
h→0
2 + h
1= 2.

Leaving Cert Maths 69
6.2 Asymptotes of a Curve
An aymptote is a line related to a given curve such that the distance from the curve to a point on the lineapproaches zero as the distance of the point from the origin increases to infinity. In other words the line getscloser and closer to the curve but does not touch it.
At LC maths, asymptotes to three different type of curves of the family
f(x) =ax2 + bx+ c
dx2 + ex+ f(6.7)
are examined.
(a = 0 = b)
e.g. f(x) =3x2 + 2x+ 5
2x2 − 7x+ 4
(a = 0,b = 0)
e.g. f(x) =2x− 1
x2 − 4
(a = 0 = b)
e.g. f(x) =3x− 1
2x+ 5
Figure 6.2: Plots of the three examples given above. The first two have two vertical asymptotes, while thefirst has one. The first and last functions have vertical asymptotes y = 3/2 but the middle function hasy = 0 as an asymptote.
Asymptotes describe the behaviour of a function as either x or f(x) → ±∞. For any function of type(6.7) the analysis can be broken down into vertical and horizontal asymptotes. The analysis for each of thethree types is similar.
6.2.1 Horizontal Asymptotes
Horizontal Asymptotes describe the behaviour of f(x) as x gets very big and positive or very big and negative.It must be seen that when x is large, ax2 dominates bx, for any values of a and b. To say x is large is totalk about the limit as x → ±∞. A quick calculation shows that:
ax2 = bx, when
⇒ x =b
a.
When x > b/a, ax2 > bx and when x gets larger and larger ax2 dominates bx: ax2 ≫ bx. This kind ofreasoning tells us:
limx→∞
ax2 + bx+ c
dx2 + ex+ f=
a
d. (6.8)
This can be shown more rigorously:
limx→∞
f(x) = limx→∞
1/x2
1/x2
ax2 + bx+ c
dx2 + ex+ f,
⇒ limx→∞
f(x) = limx→∞
a+ b/x+ c/x2
d+ e/x+ f/x2.

Leaving Cert Maths 70
Clearly, as x gets large, 1/x gets small:
limx→∞
1
x= 0,
limx→∞
1
x2= 0,
⇒ limx→∞
b
x= 0, etc.
⇒ limx→∞
f(x) = limx→∞
a+ 0 + 0
d+ 0 + 0=
a
d.
Note further that for these functions:
limx→−∞
f(x) = limx→−∞
a+ b/(−x) + c/(−x2)
d+ e/(−x) + f/(−x2)=
a
d= lim
x→+∞f(x).
Therefore the line y = a/d is the horizontal asymptote to f(x) as the larger x gets, in the positive or negativesense, the closer f(x) gets to a/d.
When a = 0 but d = 0;
f(x) =bx+ c
dx2 + ex+ f.
In this case dx2 dominates and f(x) behaves as 1/dx2 as x → ∞. As x → ∞, 1/dx2 → 0:
⇒ limx→∞
f(x) = limx→∞
bx+ c
dx2 + ex+ f,
⇒ limx→∞
f(x) = limx→∞
1/x2
1/x2
bx+ c
dx2 + ex+ f,
⇒ limx→∞
f(x) = limx→∞
b/x+ c/x2
d+ e/x+ f/x2= 0.
Hence in this case the horizontal asymptote is y = 0 - the x-axis.
When a = 0 = d then
f(x) =bx+ c
ex+ f,
⇒ limx→∞
f(x) = limx→∞
b+ c/x
e+ f/x=
b
e.
6.2.2 Vertical Asymptotes
Vertical Asymptotes describe the behaviour of f(x) as f(x) itself gets very big and positive or very big andnegative. It must be seen that for f(x) to be very big, in any of the cases (a = 0 = b), (a = 0, b = 0) or(a = 0 = b), the numerator can never dominate the denominator unless (dx2 + ex+ f) → 0. The followingare never true;
ax2 + bx+ c ≫ dx2 + ex+ f.
bx+ c ≫ dx2 + ex+ f.
bx+ c ≫ ex+ f,
when dx2 + ex + f does not tend to 0. Hence f(x) can only get large when dx2 + ex + f → 0. It is a factthat a quadratic has two factors; say:
dx2 + ex+ f = d(x− α)(x− β).
Clearly,
dx2 + ex+ f → 0 ⇔ x → α, or x → β.

Leaving Cert Maths 71
Hence to put it altogether;
f(x) → ∞ ⇔ ax2 + bx+ c
dx2 + ex+ f→ ∞ ⇔ ax2 + bx+ c
d(x− α)(x− β)→ ∞ ⇔ x → α, or x → β.
Hence the lines x = α and x = β are the vertical asymptotes as when x → α or x → β, f(x) → ±∞.
Caution!
If ax2 + bx+ c = a(x− α)(x− γ) and dx2 + ex+ c = d(x− α)(x− β) share roots; say x = α;
f(x) =ax2 + bx+ c
dx2 + ex+ f,
⇒ f(x)a(x− α)(x− µ)
d(x− α)(x− β),
⇒ f(x) =a(x− µ)
d(x− β).
In this case f(x) → ∞ at x = β only - not x = α. This should not occur at LC level however.
Whenever d = 0, and the denominator is the simpler ex + f and the vertical asymptote occurs whenex+ f = 0;
ex+ f = 0,
⇒ x = −f
e.
Example
To see all these elements consider
f(x) =3x2 − 2x+ 2
x2 − x− 2
To find the horizontal asymptotes, examine the limit as x → ∞;
limx→∞
f(x) = limx→∞
3x2 − 2x+ 2
x2 − x− 2= lim
x→∞
3− 2/x+ 2/x2
1− 1/x− 2/x2= 3.
Hence the horizontal asymptote is y = 3.To find the vertical asymptote examine x2 − x− 2 → 0;
x2 − x− 2 = (x− 2)(x+ 1) ⇒ x2 − x− 2 → 0 ⇔ x → 2, or x → −1.
Hence the lines x = 2 and x = −1 are the vertical asymptotes.

Chapter 7
Sequences and Series
7.1 Introduction: Sequences
A sequence is a list of terms
a1, a2, a3, a4, . . .
formed according to some rule or law. Examples include:
1, 4, 9, 16, 25, . . .
−1, 1,−1, 1, . . .
x
1!,x2
2!,x3
3!,x4
4!, . . .
The terms are ordered by matching them one by one with the positive integers 1,2,3,... The nth term is thusan, where n is a positive integer. A sequence can either be finite or infinite. An infinite sequence howevercan approach a limiting value as the number of terms, n, grows large. Such a sequence is described as aconvergent sequence is said to tend to a limit as n tends to infinity. More formally, a sequence {an}n∈N, issaid to have limit a, written:
limn→∞
an = a (7.1)
if given any ε > 0, ∃N ∈ N such that for all n ≥ N :
|an − a| < ε
That is, if you give me any small number ε, I can specify a number N , such that all terms an past aN arecloser to a than ε. In terms of a picture, a sequence {an}n∈N is convergent to a limit a iff given any ε > 0,the sequence is eventually contained in an ε-tube about a.
With some sequences the nth term (or general term) expresses directly the rule by which the terms areformed. This is the case in the three examples above, where the general terms are n2, (−1)n+1 and xn/n!respectively. A sequence is then a function of n, the general term being given by:
an = f(n) (7.2)
In general, at Leaving Cert level, convergence is not discussed with respect to ε-tubes etc and normallyonly the convergence of sequences of type (7.2) are considered. To find the limit of such sequences note ifan = f(n), f : R → R:
limn→∞
an = limx→∞
f(x) (7.3)
Other sequences are defined by a recurrence relation: a rule is given by which the nth term can bedetermined when one or more preceding terms are known.
72

Leaving Cert Maths 73
0 20 40 60 80 100 120 140
0.95
1.00
1.05
1.10
Figure 7.1: This sequence is plotted as a function of n ∈ N. The two solid lines are the lines y = 1.01 andy = 0.99. The limit of this sequence is 1. Given ε = 0.01, if n ≥ 100 (N = 100), |an − a| < 0.01. That is thesequence is eventually contained in the ε-tube, 1− 0.01 ≤ 1 ≤ 1 + 0.01
7.2 Introduction: Series
A series is the sum of the terms of a sequence. In the case of a finite sequence:
a1, a2, a3, . . . , aN
the corresponding series is
a1 + a2 + a3 + · · ·+ aN =N∑
n=1
an
In the case of an infinite sequence
a1, a2, . . . , an, . . .
the corresponding series is
a1 + a2 + · · ·+ an + · · · =∞∑
n=1
an
The partial sums of an infinite sequence are:
S1 = a1
S2 = a1 + a2
S3 = a1 + a2 + a3
SN = a1 + a2 + · · ·+ aN =N∑
n=1
an
If the sequence S1, S2, ..., SN of partial sums tends to a limit S as N → ∞ then S is the sum of the infiniteseries.

Leaving Cert Maths 74
7.3 Arithmetic Sequences & Series
7.3.1 Definition
An arithmetic sequence is a sequence in which every term (except the first a) differs from the previous oneby a constant amount, the common difference, d.
If the first term is a and the common difference is d, then the sequence takes the form
a, a+ d, a+ 2d, a+ 3d, . . . (7.4)
and the nth term isa+ (n− 1)d (7.5)
7.3.2 Theorem
For an arithmetic series with first term a1 = a and common difference d:
SN :=
N∑n=1
an =N
2(2a+ (N − 1)d) (7.6)
Proof (Not Examinable)
Let l be the Nth term of the sequence {an}n∈N. Hence the series is
a+ (a+ d) + (a+ 2d) + · · ·+ (l − 2d)︸ ︷︷ ︸3rd + 3rd last =a+l
+(l − d)
︸ ︷︷ ︸2nd + 2nd last =a+l
+l
︸ ︷︷ ︸first + last =a+l
In general the kth and kth-last terms add up to a + l. There are N terms, hence N/2 pairs. The sum ofthese N pairs is SN :
SN =N
2a+ l
But l is the Nth term, aN = a+ (N − 1)d:
SN =N
2(a+ l) =
N
2(a+ (a+ (N − 1)d)) =
N
2(2a+ (N − 1)d)
�
7.4 Geometric Sequences & Series
7.4.1 Definition
A geometric sequence is a sequence in which the ratio of each term (except the first a) to the preceding termis a constant, the common ratio, r.
Equivalently, given one term of the sequence ak, the next is found by multiplying it by r:
ak+1 = rak (7.7)
Therefore, if the first term is a and the common ratio is r, then the sequence takes the form
a, ar, ar2, ar3, . . . (7.8)
and the nth term isarn−1 (7.9)

Leaving Cert Maths 75
7.4.2 Theorem
For a geometric series with first term a1 = a and common ratio r = 1:
SN :=N∑
n=1
an =a(1− rN )
1− r(7.10)
Proof (Not Examinable)
Let SN be the sum of the first N terms of a geometric series:
SN = a+ ar + ar2 + ar3 + · · ·+ arN−2 + arN−1
⇒×r
rSN = ar + ar2 + ar3 + · · ·+ arN−1 + arN
⇒ SN − rSN = a− arN
⇒ SN (1− r) = a(1− rN )
⇒ SN =a(1− rN )
1− r
�
7.5 Infinite Geometric Series
7.5.1 Lemma
If −1 < r < 1, thenlimn→∞
rn = 0 (7.11)
7.5.2 Theorem
An infinite geometric series with first term a and common ratio r: −1 < r < 1 is convergent to:
∞∑n=1
an =a
1− r(7.12)
Proof (Not Examinable)
The sum of the first N terms of a geometric series, SN is given by:
SN =a(1− rN )
1− r(7.13)
Now the sum of the entire geometric series is the limit of the partial sums:
S = limN→∞
SN
⇒ S = limN→∞
a(1− rN )
1− r
⇒rN→0
S =a
1− r
�

Leaving Cert Maths 76
7.5.3 Recurring Decimals
Consider the fraction 7/9. What is 7/9 as a decimal? Well it is certainly
7
9= 9÷ 7.000 . . .
⇒ 7
9= 0.777 . . .
0.777 . . . is written 0..7. 7/9 is what is called a recurring fraction. Its decimal expansion has a repeating
pattern. For something of the form 0.121212 . . . ; write 0.121212 · · · = 0.12.
It is a deep result in number theory show that any recurring decimal is equal to some fraction. Theinverse problem therefore is given a repeating infinite decimal expansion, find the fraction that correspondsto this recurring decimal. The technique is to write the recurring fraction as an infinite geometric series.The following examples illustrate this method.
Example
Write the following as infinite geometric series and hence write them as fractions.
1. 0.36
0.36 =36
100+
36
10000+
36
1000000+ · · ·
⇒ 0.36 =∞∑k=0
36
100
(1
100
)k
⇒ 0.36 =36100
1− 1100
⇒ 0.36 =36
��10099
��100
⇒ 0.36 =
4
��3611
��99
⇒ 0.36 =4
11

Leaving Cert Maths 77
2. 0.3.6
One needs to be careful here. The decimal is
0.3.6 = 0.3666 . . .
⇒ 0.3.6 = 0.3 + 0.0666 . . .
⇒ 0.3.6 =
3
10+
6
100+
6
1000+
6
10000+ · · ·
⇒ 0.3.6 =
3
10+
∞∑k=0
6
100
(1
10
)k
⇒ 0.3.6 =
3
10+
6100
1− 110
⇒ 0.3.6 =
3
10+
2
�610
��1003
�9�10
⇒ 0.3.6 =
3
10+
2
�103
(��1010
)⇒ 0.3
.6 =
9
30+
2
30
⇒ 0.3.6 =
11
30
7.6 Arithmetico-Geometric Series
7.7 Partial Fractions
Some classes of series that appears quite complicated actually have quite a simple analysis.
7.7.1 Theorem
Any expression of the form
c
(a1n+ b1)(a2n+ b2) · · · (akn+ bk), c, ai, bi ∈ R
has a partial fraction decomposition
c
(a1n+ b1)(a2n+ b2) · · · (akn+ bk)=
A1
a1n+ b1+
A2
a2n+ b2+ · · ·+ Ak
akn+ bk, Ai ∈ R, ∀n ∈ N
Example
Find
∞∑n=1
1
n(n+ 1)
Solution: By the theorem:
1
n(n+ 1)=
A
n+
B
n+ 1
⇒ 1
n(n+ 1)=
A(n+ 1) +Bn
n(n+ 1)
⇒ 1
n(n+ 1)=
A+ (A+B)n
n(n+ 1)
⇒ 1 = A+ (A+B)n

Leaving Cert Maths 78
Since these are identically equal, the coefficients must be equal:
∴ A = 1& A+B = 0
⇒ B = −1
⇒ 1
n(n+ 1)=
1
n− 1
n+ 1
⇒N∑
n=1
1
n(n+ 1)=
N∑n=1
1
n−
N∑n=1
1
n+ 1
⇒N∑
n=1
1
n(n+ 1)= t1 + t2 + t3 + · · ·
⇒N∑
n=1
1
n(n+ 1)= 1− 1
2
+1
2− 1
3
+1
3− 1
4
+1
4− 1
5.........
+1
n− 1− 1
n
+1
n− 1
n+ 1
⇒cancellations
N∑n=1
1
n(n+ 1)= 1− 1
n+ 1
Letting n → ∞:
∞∑n=1
1
n(n+ 1)= lim
N→∞
N∑n=1
1− 1
n+ 1= 1
7.8 Difference Equations
Recurrence relations can define a sequence. Usually the first two terms shall be known and from thesesubsequent terms may be deduced.
7.8.1 Example: The Fibonacci Sequence
The Fibonacci sequence 1, 1, 2, 3, 5, 8, 13, . . . may be defined by:
u1 = 1, u2 = 1, and un+2 = un+1 + un, ∀n ≥ 1 (7.14)
Now the second part of this definition is equivalent to the difference equation:
un+2 − un+1 − un = 0
Sequences defined by recurrence relations can be written in terms of the general term; i.e.
tn = f(n)
in some cases. The following theorem guarantees this.

Leaving Cert Maths 79
7.8.2 Theorem
Supposeaun+2 + bun+1 + cun = 0 ; a, b, c ∈ R (7.15)
define a sequence un. Thenun = pαn + qβn (7.16)
satisfies (7.15) for some p and q where α and β are the roots of the associated quadratic equation:
ax2 + bx+ c = 0
Proof (Not Examinable)
Let un = pαn + qβn;
aun+2 + bun+1 + cun
= a(pαn+2 + qβn+2) + b(pαn+1 + qβn+1) + c(pαn + qβn)
= p(aαn+2 + bαn+1 + cαn) + q(aβn+2 + bβn+1 + cβn)
= pαn (aα2 + bα+ c)︸ ︷︷ ︸=0
+qβn (aβ2 + bβ + c)︸ ︷︷ ︸=0
= 0
⇒ aun+2 + bun+1 + cun = 0
That is un = pαn + qβn is a solution of (7.15). �
Remark
This theorem doesn’t describe how to find p and q but it’s not hard. The first step is to find the roots of theassociated quadratic equation α and β. The first two terms will be given, say u1 and u2. The simultaneousequations (x1 = x, ∀x ∈ R):
pα+ qβ = u1
pα2 + qβ2 = u2
have only two unknowns, namely p and q (α and β are found, u1 and u2 are given), and hence p and q maybe found.
7.9 Exam Paper Solutions
7.9.1 2009
4(a)
Three consecutive terms of an arithmetic series are 4x+ 11, 2x+ 11 and 3x+ 17. Find the value of x.Solution: For arithmetic solutions all consecutive terms differ by a constant difference d. In particular forconsecutive terms tk−1, tk, tk+1:
tk+1 − tk = d
tk − tk−1 = d
⇒ (3x+ 17)− (2x+ 11) = (2x+ 11)− (4x+ 11)
⇒ 3x = −6
⇒ x = −2
4(b)
(i) Show that2
r2 − 1=
1
r − 1− 1
r + 1
where r = ±1.

Leaving Cert Maths 80
(ii) Hence, find
n∑r=2
2
r2 − 1.
(iii) Hence, evaluate
∞∑r=2
2
r2 − 1
Solution:
(i)
1
r − 1− 1
r + 1
⇒ r + 1− (r − 1)
(r − 1)(r + 1)
⇒x2−y2=(x−y)(x+y)
2
r2 − 1
�
(ii)
n∑r=2
2
r2 − 1=
n∑r=2
(1
r − 1− 1
r + 1
)
⇒n∑
r=2
2
r2 − 1=
��1
n−1 − 1n+1
��1
n−2 − 1n
��1
n−3 − ��1
n−1
��... �
�...
��13 − ��
15
12 − ��
14
11 − ��
13
⇒n∑
r=2
2
r2 − 1=
1
2+ 1− 1
n+ 1− 1
n
⇒n∑
r=2
2
r2 − 1=
3
2− n+ 1 + n
n(n+ 1)
⇒n∑
r=2
2
r2 − 1=
3
2− 2n+ 1
n(n+ 1)

Leaving Cert Maths 81
(iii) Now
∞∑r=2
2
r2 − 1= lim
n→∞
n∑r=2
2
r2 − 1.
⇒∞∑r=2
2
r2 − 1= lim
n→∞
(3
2− 2n+ 1
n(n+ 1)
)
⇒∞∑r=2
2
r2 − 1= lim
n→∞
(3
2
)︸ ︷︷ ︸
=3/2
− limn→∞
(2n+ 1
n(n+ 1)
)︸ ︷︷ ︸
=L
⇒ L = limn→∞
1/n
1/n.2n+ 1
n(n+ 1)
⇒ L = limn→∞
2 + 1/n
n+ 1→ 2 + 0
n+ 1→ 0
⇒∞∑r=2
2
r2 − 1=
3
2

Chapter 8
Differentiation, Integration and theFundamental Theorem of Calculus
8.1 Introduction
In this chapter the derivative and definite integral are introduced in their correct setting. At Leaving Certlevel, integration is introduced merely as the inverse of differentiation. This approach simplifies things butgreater understanding comes out of a proper treatment. Historically integration was developed separatelyof differentiation and the link between them was later discovered. The link between them; namely thatintegration is indeed the inverse of differentiation, is known as the Fundamental Theorem of Calculus. Thetopics of coordinate geometry, limits and functions should be studied in more depth prior to a thoroughstudy calculus, but this brief chapter is merely intended as an exposition to aid understanding.
8.2 Differentiation
In the figure below, the line from a to b is called a secant line.
Figure 8.1: Secant Line.
Introduce the idea of slope. The slope of a line is something intuitive. A steep hill has a greater slopethan a gentle rolling hill. The slope of the secant line is simply the ratio of how much the line travelsvertically as the line travels horizontally. Denote slope by m:
m =|ac||bc|
. (8.1)
What about the slope of the curve? From a to b it is continuously changing. Maybe at one point its slope
82

Leaving Cert Maths 83
is equal to that of the secant but that doesn’t tell much. It could be estimated, however, using a ruler theslope at any point. It would be the tangent, as shown:
Figure 8.2: Tangent Line
The above line is the slope of the curve at t. Construct a secant line:
Figure 8.3: Secant line and Tangent line
Now with respect to analytic geometry, with a function f(x), the slope of this secant is given by:
m =f(x+ h)− f(x)
(x+ h)− x
⇒ m =f(x+ h)− f(x)
h
It is apparent that the secant line has a slope that is close, in value, to that of the tangent line. Let hbecome smaller and smaller:
The slope of the secant line is almost identical to that of our tangent. Let h → 0. Of course, if h = 0there is no secant. But if h got so close to 0 as doesn’t matter then there would be a secant and hence a slope.With respect to analytic geometry, with a function f(x), the slope of this secant, which is indistinguishablefrom that of the tangent to the point, is given by:
m = limh→0
f(x+ h)− f(x)
h. (8.2)
This m is the derivative of f(x). This gives the slope of the curve at every point on the curve.

Leaving Cert Maths 84
Figure 8.4: Secant line approaching slope of Tangent line
8.2.1 Notation
There are two significant branches of notation used to denote the derivative of f . The difference is justnotation. They are different ways of writing down the same thing. This section is included to fight againstsimple misunderstandings.
Newtonian Notation
The function is denoted f(x) and the graph is the set of points (x, f(x)):
x
f HxL
Figure 8.5: Newtonian notation for functions
The derivative of f(x) is denoted f ′(x). Other names for the derivative of f(x) include:
• the differentiation of f(x)
• the derived function for f(x)
• the slope of the tangent at (x, f(x))
• the gradient
• dfdx
Leibniz Notation
The function is denoted y = f(x) (e.g. y = x2); and the graph is the set of points (x, y):

Leaving Cert Maths 85
x
y
Figure 8.6: Leibniz notation for functions
In this notation, y is equivalent to f(x). However, the notation for the derivative of y is:
dy
dx. (8.3)
It must be understood that if y = f(x); then
f ′(x) ≡ dy
dx, (8.4)
and there is no notion of canceling the ds; it is just a notation. It is an illuminating one because if the secondgraph of figure 8.4 is magnified about the secant:
Figure 8.7: Leibniz notation for the derivative
If dy is associated with a small variation in y ∼ f(x+h)−f(x); and dx associated with a small variationin x ∼ h; then dy/dx makes sense.
To reiterate if y = f(x); then dy/dx is the same thing as:
• the derivative of f(x)
• the differentiation of f(x)
• the derived function for f(x)
• the slope of the tangent at (x, f(x))
• the gradient

Leaving Cert Maths 86
• f ′(x)
So to emphasise f(x) and y are freely interchangeable; as are f ′(x) and dy/dx.
8.3 Integration
What is the area of the shaded region under the curve f(x)?
Start by subdividing the region into n strips S1, S2, ..., Sn of equal width as Figure 8.8.
Figure 8.8:
The width of the interval [a, b] is b− a so the width of each of the n strips is
∆x =b− a
n.
Approximate the ith strip Si by a rectangle with width ∆xi and height f(xi), which is the value of f at theright endpoint. Then the area of the ith rectangle is f(xi) ∆xi:
The area of the original shaded region is approximated by the sum of these rectangles:
A ≈ f(x1)∆x+ f(x2)∆x+ · · ·+ f(xn)∆x. (8.5)
This approximation becomes better and better as the number of strips increases, that is, as n → ∞. Thereforethe area of the shaded region is given by the limit of the sum of the areas of approximating rectangles:
A = limn→∞
[f(x1)∆x+ f(x2)∆x+ · · · f(xn)∆x]. (8.6)

Leaving Cert Maths 87
8.3.1 Definition
If f(x) is a function defined in [a, b] and xi, ∆x are as defined above, then the definite integral of f from ato b is ∫ b
a
f(x) dx = limn→∞
n∑i=1
f(xi)∆x. (8.7)
So an integral is an infinite sum. Associate∫∼ limn→∞
∑n. Again dx is associated with a small variation
in x ∼ ∆x.
8.4 Fundamental Theorem of Calculus
8.4.1 Rough Version
If f is a function with derivative f ′ then∫ b
a
f ′(x) dx = f(b)− f(a)
Proof
f ′(x) = limh→0
f(x+ h)− f(x)
h,
⇒∫ b
a
f ′(x) dx = limn→∞
n∑i=1
f ′(xi)∆x,
⇒∫ b
a
f ′(x) dx = limn→∞
n∑i=1
[limh→0
f(xi + h)− f(xi)
h
]∆x.
Note that n → ∞ and h → 0 is equivalent to h → ∆x. This is because ∆x →n→∞
0. Hence let h ∼ ∆x;∫ b
a
f ′(x) dx = limh→0
n∑i=1
[limh→0
f(xi + h)− f(xi)
]h
h,
⇒∫ b
a
f ′(x) dx = limh→0
n∑i=1
[f(xi + h)− f(xi)].
Note h → ∆x so xi + h → xi+1: ∫ b
a
f ′(x) dx =n∑
i=1
[f(xi+1)− f(xi)].

Leaving Cert Maths 88
Note∑
i[f(xi+1)− f(xi)] forms a telescoping sum:
n∑i=1
[f(xi+1)− f(xi)] = f(x2)− f(x1) +
f(x3)− f(x2) +
f(x4)− f(x3) +
...
f(xn+1)− f(xn);
where all but f(xn+1)− f(x1) cancels. But xn+1 = b and x1 = a. Hence f(xn+1) = f(b) and f(x1) = f(a).Hence ∫ b
a
f ′(x) dx =n∑
i=1
[f(xi+1)− f(xi)],
⇒∫ b
a
f ′(x) dx = f(b)− f(a).
�
8.4.2 The Indefinite Integral
In Leaving Cert where integrals are defined as the inverse of derivatives, an indefinite integral defines inte-gration.
Definition
If f(x) is a function and it differential with respect to x is f ′(x), then∫f ′(x) dx = f(x) + c (8.8)
where c is called the constant of integration.
Note the constant of integration. It’s inclusion is vital because if f(x) is a function with derivative f ′(x)then f(x) + c also has derivative f ′(x) as:
d
dx(f(x) + c) =
df
dx︸︷︷︸=f ′(x)
+d
dxc︸︷︷︸
=0
,
⇒ d
dx(f(x) + c) = f ′(x).
Geometrically a curve f(x) with slope f ′(x) has the same slope as a curve that is shifted upwards; f(x) + c.Note that the constant of integration can be disregarded for the indefinite integral. Suppose the integrandis f ′(x) and the anti-derivative is f(x) + c. Then:∫ b
a
f ′(x) dx = (f(b) + c)− (f(a) + c),
⇒∫ b
a
f ′(x) dx = f(b)− f(a).
The cs cancel!
8.5 Conclusion
Finding the derivative of a function f at x is finding the slope of the tangent to the curve at x. Integrationmeanwhile measures the area between two points x = a and x = b. The Fundamental Theorem of Calculus

Leaving Cert Maths 89
states however that differentiation and integration are intimately related; that is given a function f :
d
dx
∫f(x) dx = f(x),∫
d
dxf(x) dx = f(x) + c.
i.e. differentiation and integration are essentially inverse processes.

Chapter 9
Differentiation
9.1 Differentiation from First Principles
To differentiate a function f(x) from first principles means to calculate f ′(x) using the definition of thederivative:
f ′(x) = limh→0
f(x+ h)− f(x)
h(9.1)
9.1.1 Proposition
1.d
dxx2 = 2x (9.2)
2.d
dxx3 = 3x2 (9.3)
3.d
dx
(1
x
)= − 1
x2(9.4)
4.d
dx
√x =
1
2√x
(9.5)
5.d
dxsinx = cosx (9.6)
6.d
dxcosx = − sinx (9.7)
Proof
1. Let f(x) = x2
f(x+ h)− f(x) = (x+ h)2 − x2
⇒x2−y2=(x−y)(x+y)
f(x+ h)− f(x) = (x+ h− x)(2x+ h)
⇒ f(x+ h)− f(x)
h= 2x+ h
⇒ f ′(x) = limh→0
f(x+ h)− f(x)
h= 2x
90

Leaving Cert Maths 91
2. Let f(x) = x3
f(x+ h)− f(x) = (x+ h)3 − x3
⇒ f(x+ h)− f(x) =��x3 + 3x2h+ 3xh2 + h3 −��x
3
⇒ f(x+ h)− f(x)
h= 3x2 + 3xh+ h2
⇒ f ′(x) = limh→0
f(x+ h)− f(x)
h= 3x2
3. Let f(x) = 1/x
f(x+ h)− f(x) =1
x+ h− 1
x
⇒ f(x+ h)− f(x) = �x− (�x+ h)
(x+ h)(x)
⇒ f(x+ h)− f(x)
h= − 1
x(x+ h)
⇒ f ′(x) = limh→0
f(x+ h)− f(x)
h= − 1
x2
4. Let f(x) =√x
f(x+ h)− f(x) =√x+ h−
√x
⇒ f(x+ h)− f(x) = (√x+ h−
√x).
√x+ h+
√x√
x+ h+√x︸ ︷︷ ︸
=1
⇒x2−y2=(x−y)(x+y)
f(x+ h)− f(x) = �x+ h− �x√x+ h+
√x
⇒ f(x+ h)− f(x)
h=
1√x+ h+
√x
⇒ f ′(x) = limh→0
f(x+ h)− f(x)
h=
1
2√x
5. Let f(x) = sinx.Lemma:
limA→0
sinA
A= 1 (9.8)
Proof: See Chapter 12: Trigonometry. �
f(x+ h)− f(x) = sin(x+ h)− sinx
Using the identity1:
sinA− sinB = 2 cos
(A+B
2
)sin
(A−B
2
)(9.9)
f(x+ h)− f(x) = 2 cos
(x+ h+ x
2
)sin
(x+ h− x
2
)⇒ f(x+ h)− f(x) = 2 cos(x+ h/2) sin(h/2)
⇒ f(x+ h)− f(x)
h=
2 cos(x+ h/2) sin(h/2)
h
⇒×(1/2)/(1/2)
f(x+ h)− f(x)
h= cos(x+ h/2)
sin(h/2)
h/2︸ ︷︷ ︸→1
⇒ f ′(x) = limh→0
f(x+ h)− f(x)
h= cosx
1in the tables

Leaving Cert Maths 92
6. Let f(x) = cosx:
f(x+ h)− f(x) = cos(x+ h)− cosx
Using the identity2:
cosA− cosB = −2 sin
(A+B
2
)sin
(A−B
2
)(9.10)
f(x+ h)− f(x) = −2 sin
(x+ h+ x
2
)sin
(x+ h− x
2
)⇒ f(x+ h)− f(x) = −2 sin(x+ h/2) sin(h/2)
⇒ f(x+ h)− f(x)
h=
−2 sin(x+ h/2) sin(h/2)
h
⇒×(1/2)/(1/2)
f(x+ h)− f(x)
h= − sin(x+ h/2)
sin(h/2)
h/2︸ ︷︷ ︸→1
⇒ f ′(x) = limh→0
f(x+ h)− f(x)
h= − sinx
9.2 The Chain Rule
9.3 Implicit Differentiation
Suppose there is an equation in terms of x, y given by:
f(x, y) = 0 (9.11)
If the x and y are combined in an appropriate way3, then (9.11) defines a curve in space where (9.11) is theequation of the curve. The equation of the curve asks the question; is a general point on the plane (x0, y0)on the curve? If it satisfies
f(x0, y0) = 0
then it is on the curve. A few examples of curves:Given the equation of a curve
f(x, y) = 0
both sides are differentiated with respect to x then the equation reads:
g(x, y, y′) = 0 (9.12)
which can be solved for y′ ≡ dy/dx in terms of x and y. This will give the slope of the tangent to the curveat (x, y). If (x, y) is not on the curve, dy/dx in this context is meaningless.At LC level the equation of the curve will typically be a sum of terms in x and y. The key is to realise thefollowing facts:
• The derivative of y with respect to x is just dy/dx.
• The derivative of a function of y must be differentiated as a chain rule.
d
dxh(y) = h′(y)y′ = h′(y)
dy
dx
• The product rule for a term of the form:
u(x)v(y) = u′(x)v(y) + u(x)v′(y)y′
⇒ u(x)v(y) = u′(x)v(y) + u(x)v′(y)dy
dx
2in the tables3they always will be at LC level

Leaving Cert Maths 93
-40 -20 0 20 40
-40
-20
0
20
40
Figure 9.1: A plot of the curve y2 − x2 + 25 = 0.
-3 -2 -1 0 1 2 3
-3
-2
-1
0
1
2
3
Figure 9.2: A plot of the curve 5x2 + 5y2 + 6xy − 16 = 0.

Chapter 10
Integration
10.1 What We Know
From the Fundamental Theorem of Calculus∫f ′(x) dx = f(x) + c (10.1)
Thus:
f(x)∫f(x)
xn (n = −1) xn+1
n+1
cosx sinx+ csinx − cosx+ cex ex + c
sec2 x tanx+ c
1x ln |x|+ c
Also because
d
dxsinnx = n cosnx , and
d
dxcosnx = −n sinnx
⇒∫
cosnx dx =sinnx
n+ c and
⇒∫
sinnx dx = −cosnx
n+ c
Also, let a > 0;
d
dx
1
aarctan
x
a=
1
a
1
1 + x2/a2.1
a
⇒ d
dx
1
aarctan
x
a=
1
�a1
(a2 + x2)/��a2.1
�a
⇒ d
dx
1
aarctan
x
a=
1
a2 + x2
⇒∫
1
a2 + x2dx =
1
aarctan
x
a+ c
94

Leaving Cert Maths 95
Also
d
dxarcsin
x
a=
1√1− x2/a2
1
a
⇒ d
dxarcsin
x
a=
1√(a2 − x2)/a2
1
a
⇒ d
dxarcsin
x
a=
√��a2
a2 − x2
1
���√a2
⇒∫
1√a2 − x2
dx = arcsinx
a
10.2 Properties of Integration
10.2.1 Proposition
• ∫(f(x)± g(x)) dx =
∫f(x) dx±
∫g(x) dx (10.2)
• ∫k f(x) dx = k
∫f(x) dx , where k ∈ R (10.3)
Proof (Non-Examinable)
• ∫(f(x)± g(x)) dx = lim
n→∞
n∑i=1
(f(xi)± g(xi))∆x
⇒∫(f(x)± g(x)) dx = lim
n→∞
(n∑
i=1
f(xi)∆x±n∑
i=1
f(xi)∆x
)
⇒∫
(f(x)± g(x)) dx = limn→∞
n∑i=1
f(xi)∆x± limn→∞
n∑i=1
g(xi)∆x
⇒∫(f(x)± g(x)) dx =
∫f(x) dx±
∫g(x) dx
• Let k ∈ R. ∫k f(x) dx = lim
n→∞
n∑i=1
kf(xi)∆x
⇒∫
k f(x) dx = limn→∞
kn∑
i=1
f(xi)∆x
⇒∫
k f(x) dx = k
(lim
n→∞
n∑i=1
f(xi)∆x
)
⇒∫
k f(x) dx = k
∫f(x) dx
Remarks
There is no direct analogue of the product, quotient nor chain rule for integration. Although the substitutionmethod below is like a chain rule for integrals.

Leaving Cert Maths 96
10.2.2 The Substitution Method for Evaluating Integrals
∫f(g(x))g′(x) dx =
∫f(u) du (10.4)
where u = g(x)
Proof (Non-Examinable)
u = g(x)
⇒ du
dx= g′(x)
⇒ dx
du=
1
g′(x)
⇒ dx =du
g′(x)
So ∫f(g(x))g′(x)dx =
∫f(u)���g′(x)
du
���g′(x)=
∫f(u)du
10.3 Indefinite Integrals
10.3.1 Proposition
Suppose f(x) has an anti-derivative F (x). Then∫ b
a
f(x) dx = −∫ a
b
f(x) dx (10.5)
Proof (Non-Examinable)
∫ b
a
f(x) dx = F (b)− F (a) = −(F (a)− F (b)) = −∫ a
b
f(x) dx
�
10.4 Techniques of Trigonometric Integration
Consider the integral ∫cos 4x cos 2x dx (10.6)
To differentiate such a function is no problem; there is a product rule. However, there is no such productrule for integration. There are functions, such as∫
sinx
xdx (10.7)
which, because there is no product or quotient rule for integration, may not be integrated easily. In fact,(10.7) has no ordinary solution in terms of elementary functions (like polynomials, exponential functions,logarithms, trigonometric functions, inverse trigonometric functions and their combinations). This won’thappen at LC level however so (10.6) may certainly be integrated. The key is to realise that there is a sum

Leaving Cert Maths 97
rule for integration so if cos 4x cos 2x can be written as a sum of integrable terms things will work out easily.Luckily such formulae exist and are in the tables:
2 cosA cosB = cos(A+B) + cos(A−B) (10.8)
2 sinA cosB = sin(A+B) + sin(A−B) (10.9)
2 sinA sinB = cos(A−B)− cos(A+B) (10.10)
2 cosA sinB = sin(A+B)− sin(A−B) (10.11)
Now (10.6) may be easily integrated.
10.4.1 Products of Unlike Trigonometric Terms
To integrate functions of the kind:
cosmx cosnx (10.12)
cosmx sinnx (10.13)
sinmx cosnx (10.14)
sinmx cosnx (10.15)
convert the product to a sum using (10.8-10.11)
Consider now the integral
I =
∫sin2 θ cos3 θ dθ (10.16)
There is no available formula to express this product as a sum. There is a substitution technique however:∫sin2 θ cos3 θ dθ =
∫sin2 θ cos2 θ cos θ dθ
Now because cos and sin are (up to sign) derivatives of each other, spot that cos θ is the derivative of sin θso cos θ can play the role of the g′(x) in (10.4). Hence let u = sin θ:
du
dθ= cos θ
⇒ dθ =du
cos θ
⇒ I =
∫sin2 θ cos2 θ���cos θ
du
���cos θ
⇒ I =
∫u2 cos2 θ du
Now it seems all is lost but as
cos2 x+ sin2 x = 1
⇒ cos2 x = 1− sin2 x
⇒ I =
∫u2(1− u2) du
Typically at LC level the powers of sin and cos in this case will be under 3.
10.4.2 Products of Powers of sin & cos
To integrate functions of the kind:
sinn x cosm θ (10.17)
break the one with an odd power into a square plus 1; i.e.
sin2n+1 θ = sin2n θ sin θ

Leaving Cert Maths 98
and then let u = the other one. If m and n are both even (m = 2 = n) then use the formulae:
cos2 x =1
2(1 + cos 2x) (10.18)
sin2 x =1
2(1− cos 2x) (10.19)
10.4.3 cos3 x and sin3 x
The integrals of cos3 x and sin3 x require a mix of the previous two cases. The integrand is manipulated asfollows (similar for sin3 x):
cos3 x = cos2 x cosx
⇒ cos3 x =1
2(1 + cos 2x) cosx
⇒ cos3 x =1
2(cosx+ cos 2x cosx)
⇒(10.8)
1
2
(cosx+
cos 3x+ cosx
2
)⇒ cos3 x =
3 cosx
4+
cos 3x
4
which can be easily integrated.
10.5 Intersecting Curves
Suppose the area between two curves is required:
-0.5 0.5 1.0 1.5
-0.5
0.5
1.0
1.5
Figure 10.1: The area enclosed between f(x) = x2 and g(x) =√x is bound inside the points where they
intersect: x = 0, 1
There are a few facts we must know. By definition, the area of a function between x = a and x = b isthe definite integral from a to b. Now consider
If f(x) ≥ g(x) for x ∈ [a, b] then, where Aba(f, g) is the area between f(x) and g(x) between x = a and
x = b:
Aba(f, g) =
∫ b
a
f(x) dx−∫ b
a
g(x) dx =
∫ b
a
(f(x)− g(x)) dx (10.20)

Leaving Cert Maths 99
Figure 10.2: The area between f(x) and g(x) (shaded) is the area under f(x) less the area under g(x).

Chapter 11
Applications of Calculus
11.1 Maxima, Minima and Points of Inflection
Given a function y = f(x); the derivative of f at x is the slope of f(x) at x. Hence
dy
dx> 0 ⇒ y = f(x) increasing, and
dy
dx< 0 ⇒ y = f(x) decreasing.
It is natural to ask the questiondy
dx= 0 ⇒ ?
On a similar note, a sketch of y = f(x) shows us that local maxima and local minima of y occur when
dy
dx= 0.
-2 2 4 6 8
Figure 11.1: A plot of a cubic function f(x) (top), its derivative f ′(x) (quadratic) and second derivativef ′′(x) (line). At the maxiumum and minimum f ′(x) = 0. At the local maximum the second derivative f ′′(x)is negative whilst at the local minimum the f ′′(x) > 0. Where f ′′(x) = 0 (and f ′(x) has a local min), thereis a point of inflection, where the graph changes from concave down to concave up.
The term local maximum refers to the fact that near the point k, such that
dy
dx(k) = 0,
f(k) is a maximum. Call such a point where
dy
dx= 0,
100

Leaving Cert Maths 101
a critical point. If y does not attain a local maxima or minima at a critical point, say k, then there are twocases:
A. y = f(x) increases to f(k), where f ′(k) = 0, then increases further. So f(k) is neither a local maximaor a minima.
B. y = f(x) decreases to f(k), where f ′(k) = 0, then decreases further. So f(k) is neither a local maximaor a minima.
Such a point (k, f(k)) is a point of inflection.
-1.0 -0.5 0.5 1.0
-3
-2
-1
1
2
3
Figure 11.2: A plot of the cubic function ±(x3+2). +(x3+2) has the behaviour of A whilst −(x3+2) of B.
11.1.1 Local Maxima
Suppose y = f(k) is a local maximum of f . Then
dy
dx[x < k] > 0,
dy
dx[k] = 0,
dy
dx[x > k] < 0.
Hence at x = k,
dy
dxis decreasing at k ⇔ d2y
dx2< 0.
whered2y
dx2≡ d
dx
dy
dx. (11.1)
Hence
(k, f(k)) a local max ⇔ dy
dx= 0 and
d2y
dx2< 0. (11.2)
11.1.2 Local Minima
Suppose y = f(k) is a local minimum of f . Then
dy
dx[x < k] < 0,
dy
dx[k] = 0,
dy
dx[x > k] > 0.

Leaving Cert Maths 102
Hence at x = k,
dy
dxis increasing at k ⇔ d2y
dx2> 0.
Hence
(k, f(k)) a local min ⇔ dy
dx= 0 and
d2y
dx2> 0. (11.3)
Putting these arguments together:
11.1.3 Critical Point Test
Suppose f(x) is a function
• y = f(x) has a Local Max at x = k iff:
dy
dx(k) = 0 &
d2y
dx2(k) < 0 (11.4)
• y = f(x) has a Local Min at x = k iff:
dy
dx(k) = 0 &
d2y
dx2(k) > 0 (11.5)
• y = f(x) has a Point of Inflection at x = k iff:
d2y
dx2(k) = 0 &
∣∣∣∣d3ydx3
∣∣∣∣ > 0 ⇔ d2y
dx2changes sign at k (11.6)
11.2 Rates of Change
Consider a function of time, f(t). It is natural to ask the question how does f change with time. From t tot+∆t, f changes from f(t) to f(t+∆t). The rate then at which f changed:
f(t+∆t)− f(t)
(t+∆t)− t=
f(t+∆t)− f(t)
∆t.
This however is only an average rate over ∆t seconds.To find the instantaneous rate of change of f(t) let∆t → 0:
instantaneous rate of change in f(t) = lim∆t→0
f(t+∆t)− f(t)
∆t(11.7)
But this is nothing other than the derivative of f at t.
instantaneous rate of change in f(t) = lim∆t→0
f(t+∆t)− f(t)
∆t=
df
dt= f ′(t)
11.2.1 Velocity & Acceleration
If s(t) is the distance of a particle from the origin, then the rate at which the distance changes is given by:
ds
dt(11.8)
The rate at which distance changes is none other than velocity:
v(t) =ds
dt(11.9)
Since acceleration is the rate of change of velocity:
a =dv
dt=
d2s
dt2

Leaving Cert Maths 103
11.3 The Newton-Raphson Method of Approximating Roots
In LC Maths, suppose the roots of the cubic equation:
f(x) = ax3 + bx2 + cx+ d (11.10)
are required. Ordinarily at LC level if f is evaluated at x = 0, 1, -1, 2, -2, 3, -3, a root of f will be found.Ordinarily at LC level one of {0,±1,±2,±3} will be a root. Recall a root of f is a number α such thatf(α) = 0:
α a root of f ⇔ f(α) = 0 (11.11)
By the factor theorem, if α is a root of f , then (x−α) is a factor of f and so f may be written as a productof (x− α) and a polynomial:
f(x) = (x− α)(ex2 + fx+ g) (11.12)
The factors of (ex2 + fx+ g) may be found either by inspection or formula:
x =−f ±
√f2 − 4eg
2e(11.13)
However not all cubics f(x) = ax3 + bx2 + cx+ d have a root in {0,±1,±2,±3}. Straight away:
f(x) = (x− 4)(x+ 5)(x− 6) = x3 − 5x2 − 26x+ 120
has roots 4, -5 and 6. In these cases there is an approximation technique due to Newton & Raphson thatcan help find roots. Given f(x) = ax3 + bx2 + cx+ d produce a graph-sketch of f . Where f cuts the x-axis,f(x) = 0. From the graph, find an approximate value, x1, for this root. If the neighbourhood of x1 isexamined it is clear that if the tangent to the curve at (x1, f(x1)), say T , is drawn, then where T cuts thex-axis is a better approximation to the root than x1. Call this x-intercept x2.
To evaluate x2 note that x2 is where the tangent to the curve at (x1, f(x1)) cuts the x-axis. The slopeof the tangent is f ′(x):
mT =dy
dx(11.14)
The slope at x1 is f ′(x1). The equation of the line L with slope m and (x1, y1) ∈ L:
L ≡ y − y1 = m(x− x1) (11.15)
T is the line with slope f ′(x1) and point (x1, f(x1)):
⇒ T ≡ y − f(x1) = f ′(x1)[x− x1]
However by definition (x2, 0) ∈ T :
0− f(x1) = f ′(x1)[x2 − x1]
⇒ − f(x1)
f ′(x1)= x2 − x1
⇒ x2 = x1 −f(x1)
f ′(x1)
If an even better approximation is required, x2 can be used in place of x1 to produce a new approximationx3:
x3 = x2 −f(x2)
f ′(x2)(11.16)
Indeed, better and better approximations can be found in this way by repeated iterations using the Newton-Raphson Formula.

Leaving Cert Maths 104
11.3.1 Newton-Raphson Approximation
In general, iff f is a function and xn an approximate root
xn+1 = xn − f(xn)
f ′(xn)(11.17)
is a better one
11.3.2 Number of Real Roots
There are, in general three roots of a cubic function. Either there are 3 real roots (which may be repeated),or else one real root and two complex roots. If there is one complex root there must be two by the ConjugateRoot Theorem (namely if z is a root of a polynomial, so is z). The character of the roots may be deducedfrom the graph of the function. The derivative of a cubic f(x) = ax3 + bx2 + cx+ d is quadratic, namely:
f ′(x) = 3ax2 + 2bx+ c
A quadratic has two roots. Hence in general f ′(x) has two roots. That is there are two points wheref ′(x) = 0. That is f has a local maximum and a local minimum. If the local max and local min are bothabove or both below the x-axis then there is only one real root. This is clear if the graph of f is drawn.Otherwise f has three roots. Assume WLOG that a > 0. Then f has one root as f comes from minusinfinity to the max above the x-axis. By assumption the local min is below the x-axis and f cuts the x-axisagain (at x a root, f(x) = 0) as it goes from the max to the min. Finally limx→∞ f(x) → ∞ so f cuts thex-axis again as f increases from the local min to positive infinity.

Chapter 12
Trigonometry
12.1 Introduction
This chapter introduces the need-to-know elements of LC Trigonometry. The vast majority of the equations,formulae and identities in this chapter are in the tables. The questions posed at LC level include:
• Solution of Triangles - given SAS, SSS, ASA etc, find the lengths of the sides, angles, etc
• Derivation of Formulae - all relevent proofs here
• Trigonometric Equations - solve for θ
• Inverse trigonometric functions, sin−1 x and tan−1 x.
With a good grasp of the fundamentals, strong algebra and the proofs learnt off, this becomes one of theeasiest sections on the course. Furthermore, there are two questions in the LC on trigonometry, which is abonus.
12.2 The Basics: Angles, sin, cos & tan
12.2.1 Definition
Consider a circle of radius r. On this circle, draw an arc, also of length r. The angle subtended by the arcmeasures one radian
Where an arc of length s is drawn on a circle of radius r, the angle subtended θ:
θ (in radians) =s
r(12.1)
The length of the circumference of a circle is 2πr. What is θ = 360◦ in radians?
θ =s
r=
2πr
r
π radians = 180◦ (12.2)
12.2.2 sin, cos & tan
The familar trigonometric functions sin, cos & tan were first encountered in the context of a right angledtriangle. Where θ = 90◦ in the triangle:
sin θ =|opposite side||hypotenuse|
cos θ =|adjacent side||hypotenuse|
tan θ =|opposite side||adjacent side|
105

Leaving Cert Maths 106
Here the concern is primarily with angles 0 ≤ θ < 90◦. The following construction extends sin, cos & tan toany angle.
-1 -0.5 0.5 1
-1
-0.5
0.5
1
Figure 12.1: The Unit Circle
In the first quadrant:
cos θ = x (12.3)
sin θ = y (12.4)
tan θ =y
x=
sin θ
cos θ(12.5)
Therefore extend the definitions of sin, cos and tan so that:
12.2.3 Definition
Let 90◦ < θ < 360◦. Suppose θ is the angle made with the positive x-axis and a line segment to a pointp = (x, y) on the unit circle. Then
sin θ = x (12.6)
cos θ = y (12.7)
tan θ =y
x(12.8)
Remark
Therefore the points on the unit circle are the points (x, y) = (cos θ, sin θ) where θ is the angle between theline segment from (0, 0) to p(x, y) and the positive x-axis.
Remark
This is where the All Small Tin Cans situation comes from. In the first quadrant and the second quadrant,the y-coordinate is positive. Therefore sin is positive there. In the other quadrants (3 & 4) the y-coordinateis negative so sin is negative there too. Similarly, in the first and fourth quadrant, the x-coordinate is positiveso cos is positive there, and similarly negative in the second and third quadrants.Consider
tan θ =y
x

Leaving Cert Maths 107
tan will be positive when y and x both have the same sign, and negative when their signs differ as:
−y
−x=
y
x, and
−y
x= −y
x=
y
−x
y and x have the same sign in the first and third quadrants, so tan is positive there; and their signs differ inthe second and fourth, so tan is negative there.
Remark: Final Extension
Finally the sin, cos and tan functions are extended to the entire real number line by the principle that360◦ ≡ 0◦ and therefore −θ ≡ 360◦ − θ. So for example,
sin 1000◦ = sin(360◦ + 360◦ + 280◦) ≡ sin(0 + 0 + 280◦) = sin 280◦
12.3 Three Fundamental Relations
12.3.1 Theorem
For any angle θcos2 θ + sin2 θ = 1 (12.9)
Proof
(cos θ, sin θ) is a point on the unit circle. Hence the distance d from (cos θ, sin θ) to the origin (0, 0) is 1.
d =√(x1 − x2)2 + (y1 − y2)2
⇒ 1 =√(cos θ − 0)2 + (sin θ − 0)2
⇒ 1 = cos2 θ + sin2 θ
�
12.3.2 Theorem: The Cosine Rule
Let a triangle have sides of length a, b and c and suppose further that the angle opposite a is A. Then
a2 = b2 + c2 − 2bc cosA (12.10)
Proof
In the shaded triangle:
sinA =m
b
cosA =n
b∴ m = b sinA and n = b cosA
Now considering the other part; the hypotenuse is a and the other sides are b sinA and c− b cosA:According to Pythagoras Theorem:
a2 = (b sinA)2 + (c− b cosA)2
⇒ a2 = b2 sin2 A+ c2 − 2bc cosA+ b2 cos2 A
⇒ a2 = b2 (sin2 A+ cos2 A)︸ ︷︷ ︸=1
+c2 − 2bc cosA
⇒ a2 = b2 + c2 − 2bc cosA
�

Leaving Cert Maths 108
Figure 12.2: If a perpendicular is dropped onto side c then sinA = h/b and cosA = k/b
Figure 12.3: The triangle on the left in RAT so obeys Pythagoras Theorem
12.3.3 Theorem: Sine Rule
If a triangle has angles A, B, C and respective opposite sides of length a, b, c, then
a
sinA=
b
sinB=
c
sinC(12.11)
12.4 Twenty Formulae
12.4.1 Theorem
For an angle θcos(−θ) = − cos θ (12.12)
Proof
By the extensioncos(−θ) = cos(0− θ) ≡ cos(360◦ − θ)

Leaving Cert Maths 109
Hence −θ is the angle formed by reflection in the x-axis:
(x, y) 7→reflection in x-axis
(x,−y) (12.13)
Therefore, θ 7→ −θ is equivalent to:
(cos θ, sin θ) 7→ (cos θ,− sin θ)
⇒ cos(−θ) = cos θ
�
12.4.2 Corollary
sin(−θ) = − sin θ (12.14)
12.4.3 Corollary
tan(−θ) = − tan θ (12.15)
Proof
tan(−θ) =sin(−θ)
cos θ
�
12.4.4 Theorem
cos(A−B) = cosA cosB + sinA sinB (12.16)
Proof
Consider points p and q on a unit circle as follows:
Figure 12.4: The angle between vectors p and q is A−B

Leaving Cert Maths 110
The points are vectors of magnitude and direction as follows:
p = (1, A) ≡ cosAi+ sinAj
q = (1, B) ≡ cosBi+ sinBj
Now, where θ is the angle between p and q;
p · q = |p||q| cos θ⇒ p · q = 1.1. cos(A−B)
Also by the properties of the dot product,
p · q = cosA cosB + sinA sinB
⇒ cos(A−B) = cosA cosB + sinA sinB
�
12.4.5 Corollary
cos(A+B) = cosA cosB − sinA sinB (12.17)
Proof
cos(A+B) = cos(A− (−B))
⇒ cos(A+B) = cosA cos(−B) + sinA sin(−B)
⇒ cos(A+B) = cosA cosB + sinA(− sinB)
⇒ cos(A+B) = cosA cosB − sinA sinB
�
12.4.6 Corollary
cos 2A = cos2 A− sin2 A (12.18)
Proof
cos 2A = cos(A+A)
⇒ cos 2A = cosA cosA− sinA sinA
⇒ cos 2A = cos2 A− sin2 A
�
12.4.7 Corollary
cos(90◦ −A) = sinA (12.19)
Proof
cos(90◦ −A) = cos 90◦ cosA+ sin 90◦ sinA
⇒ cos(90◦ −A) = (0) cosA+ (1) sinA
⇒ cos(90◦ −A) = sinA.
�

Leaving Cert Maths 111
Remark
It is easy to show using right-angle-trigonometry that (12.19) holds for A < 90◦. The above proof establishesthe fact for all angles A ∈ R.
12.4.8 Corollary
sin(90◦ −A) = cosA (12.20)
Proof
cosA = cos(90◦ − (90◦ −A)),
⇒(12.19)
cosA = sin(90◦ −A).
�
12.4.9 Corollary
sin(A+B) = sinA cosB + cosA sinB (12.21)
Proof
sin(A+B) = cos(90◦ − (A+B)),
⇒ sin(A+B) = cos(90◦ −A−B),
⇒ sin(A+B) = cos((90◦ −A)−B),
⇒(12.16)
cos(90◦ −A) cosB + sin(90◦ −A) sinB,
⇒ sinA cosB + cosA sinB.
�
12.4.10 Corollary
sin 2A = 2 sinA cosA (12.22)
Proof
sin 2A = sin(A+A)
⇒ sin 2A = sinA cosA+ sinA cosA
⇒ sin 2A = 2 sinA cosA
�

Leaving Cert Maths 112
12.4.11 Corollary
sin(A−B) = sinA cosB − cosA sinB (12.23)
Proof
sin(A−B) = sin(A+ (−B))
⇒ sin(A−B) = sinA cos(−B) + cosA sin(−B)
⇒ sin(A−B) = sinA(cosB) + cosA(− sinB)
⇒ sin(A−B) = sinA cosB − cosA sinB.
�
12.4.12 Theorem
tan(A+B) =tanA+ tanB
1− tanA tanB(12.24)
Proof
tan(A+B) =sin(A+B)
cos(A+B)
⇒ tan(A+B) =sinA cosB + cosA sinB
cosA cosB − sinA sinB
⇒ tan(A+B) =sinA cosB + cosA sinB
cosA cosB − sinA sinB× 1/(cosA cosB)
1/(cosA cosB)
⇒ tan(A+B) =tanA+ tanB
1− tanA tanB
12.4.13 Corollary
tan 2A =2 tanA
1− tan2 A(12.25)
Proof
tan 2A = tan(A+A)
⇒ tan 2A =tanA+ tanA
1− tanA tanA
⇒ tan 2A =2 tanA
1− tan2 A
�

Leaving Cert Maths 113
12.4.14 Corollary
tan(A−B) =tanA− tanB
1 + tanA tanB(12.26)
Proof
tan(A−B) = tan(A+ (−B))
⇒ tan(A−B) =tanA+ tan(−B)
1− tanA tan(−B)
⇒ tan(A−B) =tanA+ (− tanB)
1− tanA(− tanB)
⇒ tan(A−B) =tanA− tanB
1 + tanA tanB
�
12.4.15 Theorem
cos 2A =1− tan2 A
1 + tan2 A(12.27)
Proof
1− tan2 A
1 + tan2 A=
1− sin2 Acos2 A
1 + sin2 Acos2 A
⇒ 1− tan2 A
1 + tan2 A=
1− sin2 Acos2 A
1 + sin2 Acos2 A
× cos2 A
cos2 A
⇒ 1− tan2 A
1 + tan2 A=
=cos 2A︷ ︸︸ ︷cos2 A− sin2 A
cos2 A+ sin2 A︸ ︷︷ ︸=1
⇒ 1− tan2 A
1 + tan2 A= cos 2A
�

Leaving Cert Maths 114
12.4.16 Theorem
sin 2A =2 tanA
1 + tan2 A(12.28)
Proof
2 tanA
1 + tan2 A=
2 sinAcosA
1 + sin2 Acos2 A
⇒ 2 tanA
1 + tan2 A=
2 sinAcosA
1 + sin2 Acos2 A
× cos2 A
cos2 A
⇒ 2 tanA
1 + tan2 A=
=sin 2A︷ ︸︸ ︷2 sinA cosA
cos2 A+ sin2 A︸ ︷︷ ︸=1
⇒ 2 tanA
1 + tan2 A= sin 2A
�
12.4.17 Theorem
cos2 A =1
2(1 + cos 2A) (12.29)
Proof
1
2(1 + cos 2A) =
cos 2x=cos2 x−sin2 x
1
2(1 + cos2 A− sin2 A)
⇒ 1
2(1 + cos 2A) =
1
2((1− sin2 A) + cos2 A)
⇒cos2=1−sin2
1
2(1 + cos 2A) =
1
2(cos2 A+ cos2 A) =
1
�2(�2 cos
2 A)
⇒ 1
2(1 + cos 2A) = cos2 A
�
12.4.18 Theorem
sin2 A =1
2(1− cos 2A) (12.30)
Proof
Note 1 ≡ cos2 A+ sin2 A and cos 2A = cos2 A− sin2 A by (12.9) and (12.18):
1
2(1− cos 2A)
=1
2(cos2 A+ sin2 A− (cos2 A− sin2 A))
=1
2(2 sin2 A) = sin2 A
�

Leaving Cert Maths 115
12.4.19 Theorem
sin 3A = 3 sinA− 4 sin3 A (12.31)
Proof
sin 3A = sin(A+ 2A)
⇒(12.21)
sin 3A = sinA cos 2A+ cosA sin 2A
⇒ sin 3A = sinA(cos2 A− sin2 A) + cosA(2 sinA cosA)
⇒ sin 3A = sinA cos2 A− sin3 A+ 2 sinA cos2 A
⇒ sin 3A = 3 sinA cos2 A− sin3 A
⇒ sin 3A = 3 sinA(1− sin2 A)− sin3 A
⇒ sin 3A = 3 sinA− 3 sin3 A− sin3 A
⇒ sin 3A = 3 sinA− 4 sin3 A
12.4.20 Theorem
cos 3A = 4 cos3 A− 3 cosA (12.32)
Proof
cos 3A = cos(2A+A)
⇒ cos 3A = cos 2A cosA− sin 2A sinA
⇒ cos 3A = (cos2 A− sin2 A) cosA− (2 sinA cosA) sinA
⇒ cos 3A = cos3 A− sin2 A cosA− 2 sin2 A cosA
⇒ cos 3A = cos3 A− 3 sin2 A cosA
⇒ cos 3A = cos3 A− 3(1− cos2 A) cosA
⇒ cos 3A = cos3 A− 3 cosA+ 3 cos3 A
⇒ cos 3A = 4 cos3 A− 3 cosA.
�
12.5 Changing Products to Sums and Sums to Products
Frequently it will be helpful to change sums of trigonometrical expressions into products or vice versa. Forexample to find the roots of
sin 3x− sinx
it would very helpful to change this to a product and using the fact that
a.b = 0 ⇔ a = 0 or b = 0 (12.33)
to find the roots. Indeed using (12.42):
sin 3x− sinx = 2 cos 2x cosx

Leaving Cert Maths 116
In contrast, some things are easier as sums. For example there is no product rule for integration;∫f(x)g(x) dx
has no formula in terms of∫f and
∫g. However∫
(f(x) + g(x))dx =
∫f(x) dx+
∫g(x) dx (12.34)
so it can be handy to write a product as a sum. For example, using (12.35):∫2 cos 5x cos 3x dx =
∫cos 8x dx+
∫cos 2x dx.
It is quite easy to prove these formulae by messing around with the addition and subtraction formulaefor sin and cos - but the proofs are not examinable:
2 cosA cosB = cos(A+B) + cos(A−B) (12.35)
2 sinA cosB = sin(A+B) + sin(A−B) (12.36)
2 sinA sinB = cos(A−B)− cos(A+B) (12.37)
2 cosA sinB = sin(A+B)− sin(A−B) (12.38)
cosA+ cosB = 2 cos
(A+B
2
)cos
(A−B
2
)(12.39)
cosA− cosB = −2 sin
(A+B
2
)sin
(A−B
2
)(12.40)
sinA+ sinB = 2 sin
(A+B
2
)cos
(A−B
2
)(12.41)
sinA− sinB = 2 cos
(A+B
2
)sin
(A−B
2
)(12.42)
12.6 Inverse Trigonometric Functions
Consider the graph of sinx in [−π, π]:
-3 -2 -1 1 2 3x
-1.0
-0.5
0.5
1.0
sin x
Figure 12.5: The graph of y = sinx in [−π, π]
What angle has the sine of a half? Looking at the graph it can be seen there are two values; aboutx = 0.5 and 2.5 (in fact x = π/6 and 5π/6). Also if the graph is inverted: it is seen that in this range thefunction defined as the inverse of sine is not defined as one input permits two outputs. However if restrictedto [−π/2, π/2]: is a well-defined function by the vertical-line test. Hence the inverse sine function is defined.

Leaving Cert Maths 117
-1.0-0.5 0.5 1.0y
-3
-2
-1
1
2
3
sin-1 y
Figure 12.6: The graph of x = sin−1 y in [−1, 1]
12.6.1 Definition
The inverse sine function is:
sin−1(x) : [−1, 1] → [−π/2, π/2] : x 7→ y = sin−1(x) ⇔ x = sin y. (12.43)
Similarly it can be seen that the inverse tan function makes sense in the same co-domain:
12.6.2 Definition
The inverse tangent function is:
tan−1(x) : R → [−π/2, π/2] : x 7→ y = tan−1(x) ⇔ x = tan y. (12.44)
12.7 A Special Limit
Consider the case of an angle A at the centre of the unit circle:A measured in radians is given by:
θ[Rad] =s
r= s
sinA is given by:
sinA =o
h=
y
1= y
Now suppose A gets smaller and smaller: A → 0;Now as A → 0, s becomes undiscernible from y and hence A → sinA and in the limit as A → 0 they
become equal. That is to say
limA→0
sinA
A= 1. (12.45)

Leaving Cert Maths 118
-1.0 -0.5 0.5 1.0y
-1.5
-1.0
-0.5
0.5
1.0
1.5
sin-1 y
Figure 12.7: The graph of x = sin−1 y in [−1, 1]
-6 -4 -2 2 4 6x
-1.0
-0.5
0.5
1.0
tan-1
x
Figure 12.8: The graph of x = tan−1 y in [−2π, 2π]
Figure 12.9: An angle A at the centre of the unit circle

Leaving Cert Maths 119
Figure 12.10: As A → 0, s → y hence A → sinA

Chapter 13
Vectors and Transformations
13.1 Vectors: A More Technical Approach
A vector is often defined as an object in space that has both magnitude and direction. Vectors may beadded together, they may be scaled (by a real number usually), there is a zero vector, there are negativevectors. A set of vectors, together with addition and scalar multiplication is what is called a vector space.Directed line segments in two-dimensional Euclidean space - the vectors presented as Leaving Cert level -call them geometric vectors - together with the triangle law (addition) and scalar multiplication - comprisesa vector space in this technical sense. The dimension of the geometric vectors is two - that is two pieces ofinformation are required to specify an individual vector; namely the length of the vector and the direction.It is a fact that every vector space of the same dimension is equivalent. Hence the geometric vectors are thesame as {R2,+, ·}; a two-dimensional space that is more than familiar to the Leaving Cert student. Thisnote will present the vector segment of the Leaving Cert in this equivalent setting1. Hopefully by seeing thisalternate but equivalent presentation a better understanding of the topics involved will be garnered.
Also a norm may be put on a vector space. If v is a vector, |v| is the norm of v. This norm correspondsto the magnitude of a geometric vector.
13.1.1 The Vector Space {R2,+, ·}Vectors are points on the plane, v = (x, y); where x, y ∈ R (hence the 2 in R2). Vector addition is donecomponent-wise. This means that if v = (x1, y1) and u = (x2, y2), then
v + u = (x1 + x2, y1 + y2). (13.1)
Scalar multiplication is also defined component-wise. Suppose v = (x, y) ∈ R2, k ∈ R:
k · v = (kx, ky). (13.2)
In R2, the norm of a vector is simply its distance from the origin. From coordinate geometry, thedistance from a point (x1, y1) to (x2, y2) is given by:√
(x1 − x2)2 + (y1 − y2)2. (13.3)
Hence letting v = (x, y), |v| is the distance from (0, 0) to (x, y):
|v| =√x2 + y2.
1the mapping between the vectors in the Leaving Cert and {R2,+, ·} is as follows. Suppose v is a geometric vector withlength |v| and direction θ. Then f : geometric vectors → {R2,+, ·} is given by f(v) = (|v| cos θ, |v| sin θ)
120

Leaving Cert Maths 121
13.1.2 The i-j Plane
i and j are the same thing as:
i = (1, 0), (13.4)
j = (0, 1). (13.5)
There is no link between i and i =√−1. Hence
x i+ y j = (x, y). (13.6)
Figure 13.1: Three representations of the same vector. The geometric vector of length 5 and direction 36.87◦;the vector 3i+ 4j in the i-j basis and finally the most fundamental; (3, 4) ∈ R2
13.1.3 Dot Product
The Leaving Cert defines the dot product in terms of the geometric dot product. If v and u are vectors andθ the angle between them, then
v · u = |v||u| cos θ. (13.7)
In the canonical vector space, {R2,+, ·}, the dot product is far more straight forward. Let v = (x1, y1),u = (x2, y2). Then
v · u = x1x2 + y1y2. (13.8)
Here the dot product is often called the scalar product because the dot product combines two vectors toproduce a scalar (another name for a number). This is the only way of multiplying two vectors together inthe Leaving Cert.Note: There is no concept of multiplying two vectors together to get another vector. The result of takingthe dot product of two vectors is a number - not a vector.
Properties of the Dot Product
Where u = (x1, y1), v = (x2, y2), w = (x3, y3).
(DP1) The Dot Product is commutative:
u · u = x1x2 + y1y2,
⇒ u · u = x2x1 + y2y1,
⇒ u · v = v · u.

Leaving Cert Maths 122
(DP2)v · v = |v|2. (13.9)
As where v = (x, y),
v · v = x2 + y2, but
|v| =√x2 + y2.
⇒ v · v = |v|2.
(DP3)i · i = 1j · j, (13.10)
As
i · i = (1, 0) · (1, 0) = (1)(1).
(DP4)i · j = 0. (13.11)
As,
i · j = (1, 0) · (0, 1) = 1(0) + 0(1) = 0.
(DP5) The Dot Product distributes over addition:
w · (u+ v) = w · u+w · v. (13.12)
As
(x3, y3) · ((x1, y1) + (x2, y2)) = (x3, y3) · (x1 + x2, y1 + y2),
⇒ w · (u+ v) = (x3(x1 + x2), y3(y1 + y2)),
⇒ w · (u+ v) = (x3x1 + x3x2, y3y1 + y3y2),
⇒ w · (u+ v) = (x3x1, y3y1) + (x3x2, y3, y1),
⇒ w · (u+ v) = w · u+w · v.
(DP6)(ai+ bj) · (ci+ dj). (13.13)
As
ai+ bj = (a, b).
(DP7)u · v ⇔ u ⊥ v. (13.14)
This is better proved in geometric vector theory, where perpendicularity makes sense. In the canonical{R2,+, ·} vectors u, v are defined as perpendicular if u · v = 0.
(DP8)u · v = |u||v| ⇔ u∥v. (13.15)
From geometric vector theory, u∥v means that u = kv, where2 k ∈ R+. Note if u has norm, |u|; thenku has norm3 k|u|. Suppose u = kv:
u · v = kv · v,⇒ u · v = k|v||v|,
⇒ u · v = |kv||v| = |u||v|.2R+ := {x ∈ R : x > 0}3take u = (x, y); ku = (kx, ky). |ku| =
√k2x2 + k2y2 =
√k2(x2 + y2) = k
√x2 + y2 = k|u|

Leaving Cert Maths 123
Suppose now u · v = |u||v|;
x1x2 + y1y2 =√x21 + y21
√x22 + y22 ,
⇒ x1x2 + y1y2 =√(x2
1 + y21)(x22 + y22),
⇒square both sides
x21x
22 + 2x1x2y1y2 + y21y2 = x2
1x22 + x2
1y22 + y21x
22 + y21y
,2
⇒cancelations
2x1x2y1y2 = x21y
22 + y21x
22,
⇒ (x1y2 − y1x2)2 = 0,
⇒ x1y2 = y1x2,
⇒ y1y2
=x1
x2= k,
⇒ x1 = kx2, and y1 = ky2,
⇒ u = (kx2, ky2) = k(x2, y2) = kv,
⇒ u∥v.
13.1.4 Perpendicular Vector
Let v = (x, y). Define v∗ as a vector such that v · v∗ = 0; v ⊥ v∗. Let v∗ = (x∗, y∗).
v · v∗ != 0
!= (x, y) · (x∗, y∗),
⇒ xx∗ + yy∗ = 0.
Two solutions are x∗ = −y, y∗ = x and x∗ = y, y∗ = −x.
Definition
If u = (x, y) then the related perpendicular vector v⊥ is:
v⊥ = (−y, x). (13.16)
13.2 Transformations of the Plane
Note in the same way f : R → R, x 7→ x2 is a function defined between two sets (equal in this case); functionscan be defined between different sets. Consider the plane R2;
f : R2 → R2; (x, y) 7→ (x′, y′) = (ax+ by, cx+ dy),
f(x, y) = (x′, y′) = (ax+ by, cx+ dy)
given ad = bc is a linear transformation. It is has some nice properties and is studied at LC level. If a point(x, y) ∈ R2 is represented as:
(x, y) ≡(
xy
),
then the transformation:
f : R2 → R2; (x, y) 7→ (x′, y′) = (ax+ by, cx+ dy),
f(x, y) = (x′, y′) = (ax+ by, cx+ dy)
is equivalent to the transformation(a bc d
)(xy
)=
(ax+ bycx+ dy
)The transformation f has the nice properties:
(i) f maps lines onto lines

Leaving Cert Maths 124
(ii) f maps pairs of parallel lines onto pairs of parallel lines
(iii) f maps line segments onto line segments
(iv) f maps parallelograms onto parallelograms
(v) Where orst is a parallelogram;
Area(orst) : Area(f(o)f(r)f(s)f(t)) = 1 : det f, (13.17)
where det f is the determinant of the matrix representation of f , namely det f = ad− bc.
At LC level we must be able to demonstrate each of these facts for a given transformation; e.g.
f : (x, y) = (8x+ 3y, 2x+ y).
The rough methods for demonstrating these facts are:
(i) Find x and y in terms of x′ and y′ by solving the simultaneous equations:
ax+ by = x′, (13.18)
cx+ dy = y′. (13.19)
Now transform the general line, L ≡ y = mx+ c accordingly by letting x = v(x′, y′) and y = u(x′, y′).With respect to the x′-y′ axes, the transformed line will be of first degree, y′ = m′x′ + c′, and hencethe equation of a line.
(ii) Parallel lines have form L ≡ y = mx + l and K ≡ y = mx + k; i.e. equal slopes. Their respectiveimages transformed according to letting x = v(x′, y′) and y = u(x′, y′) - are two lines of equal slope.
(iii) I wouldn’t expect this question to come up; it’s quite tricky.Any line segment is represented by:
y = mx+ c where (13.20)
x1 ≤ x ≤ x2, and (13.21)
y1 ≤ y ≤ y2. (13.22)
Again substitute x and y for x = v(x′, y′) and y = u(x′, y′). The simultaneous inequalities (13.21) and(13.22) can then be solved to show that the image of the line segment is:
y′ = m′x′ + c′ where y and x have been transformed (13.23)
x′1 ≤ x′ ≤ x′
2, and (13.24)
y′1 ≤ y′ ≤ y′2. (13.25)
(iv) This follows from (ii) and (iii).
(v) Find the images of the points o, r, s, t of orst; f(o), f(r), f(s), f(t). The area of orst is twice the areaof the triangle ors. The area of ∆abc;
∆abc =1
2|x1y2 − x2y1| if one vertex = (0, 0), (13.26)
so Area(orst) may be found.The area of f(o)f(r)f(s)f(t) is twice the area of the triangle f(o)f(r)f(s). Compute the area of∆f(o)f(r)f(s) by the same method and set;
Area(orst) : Area(f(o)f(r)f(s)f(t)).
It will be found that this ratio is 1 : (ad− bc).

Chapter 14
Appendices
14.1 Examinable Proofs
14.1.1 Algebra
Factor Theorem for Cubics
k ∈ R is a root of a cubic polynomial f(x) if and only if (x− k) is a factor of f(x)
Proof: Suppose k is a root of f(x). Let1
f(x) = ax3 + bx2 + cx+ d
f(k) = ak3 + bk2 + ck + d = 0
as k is a root.
f(x)− f(k) = a(x3 − k3) + b(x2 − k2) + c(x− k)
⇒ f(x)− 0 = a(x− k)(x2 + xk + k2) + b(x− k)(x+ k) + c(x− k)
⇒ f(x) = (x− k)[a(x2 + xk + k2) + b(x+ k) + c]
⇒ (x− k) is a factor of f(x)
Suppose on the contrary that (x− k) is a factor of f(x):
f(x) = (x− k) · g(x)
where x is some function of x. Now
f(k) = (k − k) · g(k)⇒ f(k) = 0 · g(k) = 0
That is, k is a root of f(x). �
Remark: In fact this theorem is true for all polynomials; not just cubics (degree ≤ 3). The proof ofthis more general theorem is not examinable.
1
(x− y)3 = x3 − 3x2y + 3xy2 − y3
⇒ x3 − y3 = (x− y)3 + 3x2y − 3xy2
⇒ x3 − y3 = (x− y)3 + 3xy(x− y)
⇒ x3 − y3 = (x− y)((x− y2) + 3xy)
⇒ x3 − y3 = (x− y)(x2 − 2xy + y2 + 3xy)
⇒ x3 − y3 = (x− y)(x2 + xy + y2)
125

Leaving Cert Maths 126
De Moivre’s Theorem for Integers
If z = r(cos θ + i sin θ), then ∀n ∈ Zzn = rn(cosnθ + i sinnθ) (14.1)
Proof:
De Moivre’s Theorem for n ∈ N
Let P (n) be the proposition that
(r(cos θ + i sin θ))n= rn(cosnθ + i sinnθ) (14.2)
((r(cos θ + i sin θ))0= 1
r0(cos 0θ + i sin 0θ)
= cos 0 + i sin 0 = 1
Hence P (1) is true.Assume now that P (k) is true:
(r(cos θ + i sin θ))k= rk(cos kθ + i sin kθ)
⇒ (r(cos θ + i sin θ))k+1
= (r(cos θ + i sin θ))k(r(cos θ + i sin θ))
⇒ (r(cos θ + i sin θ))k+1
= rk(cos kθ + i sin kθ) (r(cos θ + i sin θ))
⇒ (r(cos θ + i sin θ))k+1
= rk+1[cos kθ cos θ + i sin kθ cos θ + i cos kθ sin θ − sin kθ sin θ]
⇒ (r(cos θ + i sin θ))k+1
= rk+1[cos kθ cos θ − sin kθ sin θ + i sin kθ cos θ + i cos kθ sin θ]
⇒cos(A+B)=cos cos− sin sin; sin(A+B)=sin cos+ cos sin
(r(cos θ + i sin θ))k+1
= rk+1[cos(kθ + θ) + i sin(kθ + θ)]
⇒ (r(cos θ + i sin θ))k+1
= rk+1[cos(k + 1)θ + i sin(k + 1)θ]
By induction, P (n) is true for all n ∈ N. That is De Moivre’s Theorem is true for all n ∈ N.
De Moivre’s Theorem for n ∈ Z
The theorem has been shown for n ∈ N. Let m ∈ Z/N = −n ∈ N; i.e. m < 0:
zm = z−n =1
zn
⇒ zm =1
[r(cos θ + i sin θ)]n
⇒ zm =1
[rn(cosnθ + i sinnθ)]
⇒ zm =1
rn.
1
(cosnθ + i sinnθ)
⇒ zm =1
rn.
1
(cosnθ + i sinnθ).cosnθ − i sinnθ
(cosnθ − i sinnθ)︸ ︷︷ ︸=1
⇒ zm = r−n cosnθ − i sinnθ
cos2 nθ + sin2 nθ
⇒sin2 +cos2=1
zm = r−n(cosnθ − i sinnθ)
⇒cos(−A)=cosA, sin(−A)=− sinA
r−n(cos(−nθ) + i sin(−nθ))
⇒m=:−n
zm = rm(cosmθ + i sinmθ)
�

Leaving Cert Maths 127
14.1.2 Geometry
Distance from a point to a Line
The perpendicular distance, d, from a point p(x1, y1) to a line
L ≡ ax+ by + c = 0 (14.3)
is given by
d =|ax1 + by1 + c|√
a2 + b2(14.4)
Proof:
Figure 14.1: L and D intersect where the perpendicular cuts the line L.
L ≡ ax+ by + c = 0
⇒ L ≡ by = −ax− c
⇒ L ≡ y = −a
bx− c
a
⇒ mL = −a
b
Hence lines perpendicular to L have slope b/a. Let D be the line perpendicular to L through p(x1, y1)
D ≡ y − y1 = mD(x− x1)
⇒ D ≡ y − y1 =b
a(x− x1)
⇒ D ≡ ay − ay1 = bx− bx1
⇒ D ≡ bx− ay = bx1 − ay1

Leaving Cert Maths 128
To find the intersection of L and D solve the simultaneous equations:
ax+ by = −c (14.5)
bx− ay = bx1 − ay1 (14.6)
⇒(14.5)
x =−c− by
a= − c
a− b
ay (14.7)
⇒(14.6)
b(−c− by)
a− ay = bx1 − ay1
⇒×a
−bc− b2y − a2y = abx1 − a2y1
⇒ y(a2 + b2) = a2y1 − abx1 − bc
⇒ y =a2y1 − abx1 − bc
a2 + b2(14.8)
⇒(14.7)
x = − c
a− b
a
a2y1 − abx1 − bc
a2 + b2
⇒ x =−c(a�2 +��b2) +��b2c+ �ab
2x1 − a�2by1
�a(a2 + b2)
⇒ x =b2x1 − ca− aby1
a2 + b2(14.9)
Now d is the distance between p(x1, y1) and the intersection of L and D :
d =
√(b2x1 − aby1 − ca
a2 + b2− x1
)2
+
(a2y1 − abx1 − bc
a2 + b2− y1
)2
⇒ d2 =
(���b2x1 − aby1 − ac− a2x1 −���b2x1
a2 + b2
)2
+
(a2y1 − abx1 − bc−���a2y1 − b2y1
a2 + b2
)2
⇒×(a2+b2)2
[d(a2 + b2)]2 = ((−a)(ax1 + by1 + c))2 + ((−b)(ax1 + by1 + c))
⇒ [d(a2 + b2)]2 = a2((ax1 + by1 + c)2 + b2((ax1 + by1 + c)2
⇒ [d(a2 + b2)]2 = (a2 + b2)(ax1 + by1 + c)2
⇒÷(a2+b2)2
d2 =(ax1 + by1 + c)
a2 + b2
⇒√x2=|x|
d =|ax1 + by1 + c|√
a2 + b2
�Remark: Compare this proof to the one in the book and choose which you understand better.
Angle between Two Lines
The tan of the angles between two lines, whose slopes are m1 and m2, is given by
± m1 −m2
1 +m2m2(14.10)
Proof:
A = θ +B, thus θ = A−B:
tan θ = tan(A−B)
⇒= tan θ =tanA− tanB
1 + tanA tanB
⇒ tan θ =m1 −m2
1 +m1m2

Leaving Cert Maths 129
Figure 14.2: m1 = tanA and m2 = tanB.
ϕ = 180◦ − θ:
tanϕ = tan(180◦ − θ)
⇒ tanϕ =tan 180◦ − tan θ
1 + tan 180◦ tan θ
⇒ tanϕ =0− tan θ
1 + 0
⇒ tanϕ = − tan θ = − m1 −m2
1 +m1m2
�

Leaving Cert Maths 130
Tangent Theorem
The equation of the tangent to the circle x2 + y2 = r at the point x1x+ y1y = r2.Proof:
Figure 14.3: For (x, y) to be on the tangent line, c ·R=0, the vector from (x1, y1) to (x, y).
c is the vector from x1i+ y1j to xi+ yj:
c = (x− x1)i+ (y − y1)j
R = x1i+ y1j
⇒ T ≡ c ·R = 0
⇒ T ≡ (x− x1)x1 + (y − y1)y1 = 0
⇒ T ≡ x1x− x21 + y1y − y21 = 0
⇒ T ≡ x1x+ y1y = x21 + y21 = r2
�

Leaving Cert Maths 131
14.2 Differentiation: Learning Scheme
This chapter outlines the learning flow differentiation at LC level.
14.2.1 Differentiation from First Principles
In the first instance, differentiation from first principle is presented and defined.
Differentiation of Elementary Functions
Call the following functions the elementary functions:
elementary functions := {quadratics: ax2 + bx+ c, sinx, cosx,√x, 1/x}. (14.11)
The elementary functions are differentiated from first principles and the student must be able to differentiatethese functions from first principles.
The Six Rules of Differentiation
The Six Rules are proved using differentiation from first principles. The student must be able to prove theSix Rules:
(D1) The Sum RuleIf u(x) and v(x) are two functions and if
f(x) = u(x) + v(x), then
df
dx=
du
dx+
dv
dx. (14.12)
(D2) The Difference RuleIf u(x) and v(x) are two functions and if
f(x) = u(x)− v(x), then
df
dx=
du
dx− dv
dx. (14.13)
(D3) The Product RuleIf u(x) and v(x) are two functions and if
f(x) = u(x).v(x), then
df
dx= u.
dv
dx+ v.
du
dx. (14.14)
(D4) The Quotient RuleIf u(x) and v(x) are two functions and if
f(x) =u(x)
v(x), then
df
dx=
v.dudx − u. dvdxv2
. (14.15)
(D5) The Scalar RuleIf g(x) is a function and if f(x) = k g(x), where k is a constant (k ∈ R) then
df
dx= k.
dg
dx. (14.16)
(D6) The Power RuleIf f(x) = xn, where n ∈ N, then:
df
dx= nxn−1. (14.17)
When the Six Rules are used to differentiate functions what is being done is called differentiation by rule.Functions are differentiated from first principles only when requested to do so - as it usually takes muchlonger. Note that the Product and Quotient Rules appear on page 42 of the Maths Tables.

Leaving Cert Maths 132
14.2.2 The Chain Rule
The Chain Rule allows us to differentiate a composite function. If u(x) and v(x) are functions and f(x) =u(v(x)) = u ◦ v(x) then:
df
dx=
du
dv
dv
dx. (14.18)
14.2.3 The Exponential Function, ex
There is a special number e:
e := limn→∞
(1 +
1
n
)n
≈ 2.718; (14.19)
with the property that if the graph of f(x) = ex is drawn, the slope of the curve is equal to the y-coordinate.In other words,
d
dxex = ex. (14.20)
Remark
Later it will be seen in Further Calculus and Series that functions have a power series expansion. The powerseries expansion of ex is:
ex = 1 +x
1!+
x2
2!+
x3
3!+ . . . (14.21)
The general term in this series is:
tn =xn
n!
By the Sum Rule, the differentiation of a sum is the sum of the derivatives. Hence consider
d
dxtn =
n
n!xn−1 =
n
n(n− 1)(n− 2) · · · (2)(1)xn−1 =
xn−1
(n− 1)!= tn−1.
⇒ d
dxex = 1 +
x
1!+
x2
2!+
x3
3!+ . . .
⇒ d
dxex = ex.
14.2.4 Inverting
Ordinarily in LC maths, y = f(x). That is y is a function of x. However, for some functions y = f(x) thereis an inverse: x = f−1(y). For such functions, y = f(x), x = g(y) may be written; where gf(x) = x. Thenx can be differentiated with respect to y. Suppose
dx
dy= u(y)
some function of y. Then
dy
dx=
1
dx/dy,
⇒ dy
dx=
1
u(y).
Now substitute f(x) for y in u(x). This method of inverting is used to differentiate both lnx and theinverse trigonometric functions sin−1 x and tan−1 x - whose inverses are, respectively, x = ey, x = sin y andx = tan y.

Leaving Cert Maths 133
14.2.5 Summary
The following is the learning scheme for LC differentiation for a function y = f(x):
DFP Chain Rule Inverting
↙ ↘ ↙ ↘
Elementary Functions Six Rules ex lnx sin−1, tan−1

Leaving Cert Maths 134
14.3 Paper 1 Questions 1-3: 6 Need To Knows
14.3.1 Factor Theorem
Description
The factor theorem states:
A number k is a root of a polynomial if and only if (x− k) is a factor
In a mathematical rephrasing:f(k) = 0 ⇔ f(x) = (x− k)g(x) (14.22)
where g(x) is another polynomial. Typically at LC level is used for cubic polynomials. If k is a root of acubic polynomial f(x):
f(x) = (x− k)g(x) (14.23)
where g(x) will be a quadratic polynomial; i.e. of form
g(x) = ax2 + bx+ c (14.24)
Example
Find the roots off(x) = 6x3 − 11x2 + 6x− 1 (14.25)
By trial and error look for a root. At LC level there will always be a root in {0,±1,±2,±3} (unless we areasked to use the Newton-Raphson method):
f(0) = 6(0)− 11(0) + 6(0)− 1 = −1 ⇒ 0 not a root
f(1) = 6(1)− 11(1) + 6(1)− 1 = 0 ⇒ 1 a root
⇒ (x− 1) a factor
Now (x−1) a factor means it will divide in nicely into f(x) (compare 4 is a factor of 12: 12÷4 = 3 - dividesnicely).
6x2 −5x +1x− 1 | 6x3 −11x2 +6x −1
6x3 −6x2
−5x2 +6x−5x2 +5x
x −1x −1
0 .
⇒ f(x) = (x− 1) (6x2 − 5x+ 1)︸ ︷︷ ︸=g(x)
⇒ g(x) = 6x2 − 3x− 2x+ 1
⇒ g(x) = 3x(2x− 1)− 1(2x− 1)
⇒ g(x) = (2x− 1)(3x− 1)
⇒ f(x) = (x− 1)(2x− 1)(3x− 1)
⇒ roots of f(x) are 1,1
2,1
3

Leaving Cert Maths 135
Theorem
k ∈ R is a root of a cubic polynomial f(x) if and only if (x− k) is a factor of f(x)
Proof (Examinable): Suppose k is a root of f(x). Let2
f(x) = ax3 + bx2 + cx+ d
f(k) = ak3 + bk2 + ck + d = 0
as k is a root.
f(x)− f(k) = a(x3 − k3) + b(x2 − k2) + c(x− k)
⇒ f(x)− 0 = a(x− k)(x2 + xk + k2) + b(x− k)(x+ k) + c(x− k)
⇒ f(x) = (x− k)[a(x2 + xk + k2) + b(x+ k) + c]
⇒ (x− k) is a factor of f(x)
�
14.3.2 Simultaneous Equations
Description
Two equations in two unknowns looks like:
f(x, y) = 0 (14.26)
g(x, y) = 0 (14.27)
Geometrically (14.26) and (14.27) are two curves in space (i.e. the point (x, y) in the plane is on thefirst curve if it satisfies (1.3.2)), and to solve the simultaneous equations is to find their intersections. Ingeneral, there can be no intersection, an number of intersections or a unique intersection. At LC level usuallythere will be one or two intersections. For the case of lines:
a1x+ b1y = c1 (14.28)
a2x+ b2y = c2 (14.29)
there can only be one intersection3:The method for solution of simultaneous equations is as follows. Solve (14.26) for one variable, say x;
plug x into (14.27); so now (14.27) is an equation in y alone, which we can solve for y. When we found asolution(s) for y plug it into (14.26) to find x.
Also at LC level, simultaneous (linear) equations in three unknowns are examinable:
a1x+ b1y + c1z = d1 (14.30)
a2x+ b2y + c2z = d2 (14.31)
a3x+ b3y + c3z = d3 (14.32)
Geometrically (14.30-14.32) are planes is space and the question asks, where do they intersect?Luckily at LC case 1 in the diagram will be the case (any set of three simultaneous linear equations
they give you will have a unique solution). The following algorithm (method) will solve these every time:
2
(x− y)3 = x3 − 3x2y + 3xy2 − y3
⇒ x3 − y3 = (x− y)3 + 3x2y − 3xy2
⇒ x3 − y3 = (x− y)3 + 3xy(x− y)
⇒ x3 − y3 = (x− y)((x− y2) + 3xy)
⇒ x3 − y3 = (x− y)(x2 − 2xy + y2 + 3xy)
⇒ x3 − y3 = (x− y)(x2 + xy + y2)
3in the case of parallel lines there is no intersection but this won’t occur at LC

Leaving Cert Maths 136
1.2 1.4 1.6 1.8 2.0
-1.0
-0.5
0.5
1.0
Figure 14.4: Two lines may intersect at one point only: (14.28-14.29) have a unique solution.
Figure 14.5: Three planes can intersect at a point, a line, or nowhere.
Algorithm to Solve Three Simultaneous Equations
1. Find the intersection of planes 1 and 2 (14.30) and (14.31). It will be a line (ax+ by+ c = 0). Do thisby solving (14.30) and (14.31) for z:
z =d1 − a1x− b1y
c1
z =d2 − a2x− b2y
c2
2. Set these two equal to each other:
d2 − a2x− b2y
c2=
d1 − a1x− b1y
c1
and solve for an equation in x and y which is the equation of the line L12 intersection planes 1 and 2
3. Find L23, the equation of the line which is the intersection of planes 2 and 3.
4. Solve for the intersection of L12 and L23 (solve their simultaneous equations) for x and y.
5. Put x, y back into (14.30) to find z.

Leaving Cert Maths 137
14.3.3 Inequalities
Description
An inequality at LC level looks like:
f(x) ≤ 0
f(x) > 0 , etc
What an inequality does is ask us for which numbers, or range of numbers does the inequality hold. Forexample, take the inequality
x+ 1
x− 1< 4 (14.33)
This asks us, where is f(x) = (x+ 1)/(x− 1) < 4 (equivalently F (x) = (x+ 1)/(x− 1)− 4 < 0)? In termsof a picture:
-4 -2 2 4
-1
1
2
3
4
5
Figure 14.6: We can see the function is less than 4 every outside a region about x = 3/2
The Rules of Inequalities
1. A quantity can be added to both side (to subtract add a negative quantity)
2. A POSITIVE quantity can be multiplied to both sides (to divide by a quantity λ, multiply by 1/λ)
With just these two rules and some knowledge of quadratic polynomials we can solve the likes of (14.33).Now the implementation of rule 1 is no problem but how does rule 2 work for x. Is (x − 1) positive? Canwe say:
x+ 1
x− 1< 4
⇒ x+ 1 < 4(x− 1)?
Well x − 1 > 0 ⇒ x > 1; so this new inequality is only valid if x > 1. So instead of looking at differentregions of x ∈ R, instead multiply by (x − 1)2. Now this is definitely positive because (x − 1) is just somenumber, and the square of a (real) number is always positive! So
x+ 1
x− 1< 4
⇒×(x−1)2
(x+ 1)(x− 1) < 4(x− 1)2
⇒+(−4(x−1)2)
(x+ 1)(x− 1)− 4(x− 1)2 < 0
⇒ (x− 1)[(x+ 1)− 4(x− 1)] < 0
⇒ (x− 1)(−3x+ 5) < 0

Leaving Cert Maths 138
Now the knowledge of quadratics kicks in. A feature of the geometry of a quadratic
g(x) = ax2 + bx+ c (14.34)
is as follows:
If a > 0 then g is concave-up (happy); and if a < 0 then g is concave down (sad)
In terms of a picture:
-20 -10 10 20
-200
200
400
600
Figure 14.7: The graphs of x2 + x+ 300 and −x2 + x+ 100. The first is happy as a = 1 > 0; the second issad as a = −1 < 0.
Now back to our inequality:
(x− 1)(−3x+ 5) < 0
(x− 1)(−3x+ 5) is a sad or concave down quadratic because x× (−3x) = −3x2, a = −3 < 0. Now such isthe geometry of a quadratic, that if we look at Figure 14.7 between the roots a sad quadratic is positive, andoutside the roots a sad quadratic is negative (and vice-versa for a happy quadratic). Now (x− 1)(−3x+ 5)is zero or has roots at x = 1 and x = 5/3 and the geometry dictates that outside these roots, in intervalnotation:
(−∞, 1) ∪ (5/3,∞) = [1, 5/3]′ (14.35)
(x − 1)(−3x + 5) < 0; and because we only used the two rules this will solve the original problem. Indeedlooking back at Figure 14.6 we can see this is indeed the case.
14.3.4 Quadratic Equations
At this stage we should know what quadratics are and what they look like. We should know how to factorquadratics and moreover why we factor them. We should also know that if we can’t factorise (or even if wecan), that there is a formula for finding the roots. More important than knowing this formula, we shouldknow that it’s in the tables.
Nature of Roots
If we examine the formula for the roots of a quadratic:
ax2 + bx+ c
x± =−b±
√b2 − 4ac
2a
⇒ x± =−b
2a±
√b2 − 4ac
2a
Clearly the ±√b2 − 4ac/2a is a critical term. Indeed b2−4ac is called the determinant of the quadratic;
because it determines the nature of the roots.

Leaving Cert Maths 139
b2 − 4ac > 0 Two real distinct roots:
−b
2a+
√b2 − 4ac
2a, and
−b
2a−
√b2 − 4ac
2a
b2 − 4ac = 0 Two real repeated roots:
−b
2a
They are called repeated because in this case:
f(x) = ax2 + bx+ c = a
(x+
b
2a
)2
b2 − 4ac < 0 Now√b2 − 4ac is the square root of a negative quantity and hence complex. Now any root with this
complex element:
±√b2 − 4ac
2a= ±
√(−1)(4ac− b2)
2a= ±i
√4ac− b2
2a
is certainly not real.
-4 -2 2 4 6
5
10
15
20
25
30
35
Figure 14.8: In terms of a picture here is a plot of quadratic functions with two real distinct roots, one realrepeated root and no real roots.
α & β Puzzles
Two facts:
1. If α and β are the roots of a quadratic equation then the equation is
x2 − (α+ β)x+ αβ = 0 = x2 − (sum of roots)x+ product of roots = 0 (14.36)
2. If α and β are the roots of
ax2 + bx2 + c = 0
then
α+ β = − b
a
αβ =c
a

Leaving Cert Maths 140
Clearly fact 2 is a corollary of fact 1.
Now the following algebra is needed to do the questions asked at LC level:
x2 + y2 = (x+ y)2 − 2xy
1
x+
1
y=
x+ y
xy
x3 + y3 = (x+ y)3 − 3xy(x+ y)
Now there is no need to learn these off. Its better you can derive them on the spot:
(x+ y)2 = x2 + 2xy + y2...
1
x+
1
y=
y + x
xy
(x+ y)3 = x3 + 3x2y + 3xy2 + y3
⇒ x3 + y3 = (x+ y)3 − 3xy(x+ y)
The key to these questions is that given say
ax2 + bx+ c (14.37)
from the facts 1 & 2 we can extricate α+ β and αβ and then using the following:
α2 + β2 = (α+ β)2 − 2αβ
1
α+
1
β=
α+ β
αβ
α3 + β3 = (α+ β)3 − 3αβ(α+ β)
more complicated quantities such as α3 + β3 may be calculated.
14.3.5 Matrix Multiplication
Nothing complicated here but it comes up every year:
(i)
C = AB =
1st row by 1st column 1st row by 2nd column · · · 1st row by last column
2nd row by 1st column 2nd row by 2nd column · · · 2nd row by last column
last row by 1st column last row by 2nd column · · · last row by last column
(14.38)
(ii) A 1× 2 matrix by a 2× 1 matrix.
(a b
)( c
d
)= (ac+ bd) (14.39)
Note a 1 × 2 matrix by a 2 × 1 matrix is a 1 × 1 matrix. This is equivalent to a real number; in thiscase ac+ bd.
(iii) A 1× 2 matrix by a 2× 2 matrix.
(a b
)( x y
z w
)=(ax+ bz ay + bw
)(14.40)
Note a 1× 2 matrix by a 2× 2 matrix is a 1× 2 matrix.

Leaving Cert Maths 141
(iv) A 2× 2 matrix by a 2× 1 matrix.(x y
z w
)=(ax+ bz ay + bw
)( a
b
)=
(ax+ by
az + bw
)(14.41)
Note a 2× 2 matrix by a 2× 1 matrix is a 2× 1 matrix.
(v) (a b
c d
)(e f
g h
)=
(ae+ bg af + bh
ce+ dg cf + dh
)
14.3.6 Polar Form
Given a complex number z = a+ ib, the Argand diagram puts z in a point on a plane:
Figure 14.9: This Argand Diagram shows z = a+ bi, Re(z) and Im(z) plotted geometrically.
But a point in space is equivalent to a vector - a vector with magnitude and direction:So given a complex number in the form z = a + ib it can be be written as a vector (r, θ) with r = |z|
and θ = arg(z) the angle made with the x-axis in the following sense:Once (r, θ) are found we may write:
z = r(cos θ + i sin θ) (14.42)
and the celebrated Theorem of De Moivre applies:
De Moivre’s Theorem for Integers
If z = r(cos θ + i sin θ), then ∀n ∈ Zzn = rn(cosnθ + i sinnθ) (14.43)

Leaving Cert Maths 142
Figure 14.10: z in polar coordinates - z looks like a vector with magnitude r and direction with respect tothe x-axis θ. Clearly r = |z| and θ =: arg(z) = arctan(b/a)
Figure 14.11: The argument of z is the angle z makes with the positive x-axis as shown
When doing questions on the polar form of a complex number, ensure to draw diagrams to make surearg(z) is found correctly.

Leaving Cert Maths 143
14.4 Paper 1 Questions 6-8: 6 Need to Knows
14.4.1 Parametric Differentiation
Ordinarily one is concerned with slopes of tangents to functions. For example,
-2 -1 1 2
1
2
3
4
Figure 14.12: The derivative of f(x) = x2 is 2x - this tells us that the slope of the tangent to the curve atx = 1 is 2.
However functions are not the only curves whose tangent we might be interested in. Consider the setof points in the plane defined by:
x = r cos t
y = r sin t (14.44)
t ∈ [0, 2π]
In fact this describes a circle of radius r because:
x2 + y2 = r2 cos2 t+ r2 sin2 t = r2 (sin2 t+ cos2 t)︸ ︷︷ ︸=1
= r2
The parameter t is the angle at which the point is in (the usual) relation to the positive x-axis. Supposewe want to know the slope of the tangent to the curve at the point corresponding to t = π/6. Now, using aChain Rule
dy
dt=
dy
dx.dx
dt
⇒ dy
dx=
dydtdxdt
⇒ dy
dx=
r cos t
−r sin t= − 1
tan t= − cot t
So at the point corresponding to π/6, the slope of the tangent is
− cotπ/6 = −√3
To get the equation of the tangent we need a point on the curve. Well for t = π/6:
x = r cosπ/6 =r√3
2
y = r sinπ/6 =r
2
⇒ T ≡ y − r
2= −
√3
(x− r
√3
2
)

Leaving Cert Maths 144
-1.0 -0.5 0.5 1.0
-1.0
-0.5
0.5
1.0
Figure 14.13: The circle defined as the set of points (x, y) given by (14.44), parameterised by t.
14.4.2 Max/ Min Problems
Given a function y = f(x); the derivative of f at x is the slope of f(x) at x. Hence
dy
dx> 0 ⇒ y = f(x) increasing, and
dy
dx< 0 ⇒ y = f(x) decreasing.
It is natural to ask the questiondy
dx= 0 ⇒ ?
On a similar note, a sketch of y = f(x) shows us that local maxima and local minima of y occur when
dy
dx= 0.
The term local maximum refers to the fact that near the point k, such that
dy
dx(k) = 0,
f(k) is a maximum. Call such a point where
dy
dx= 0,
a critical point.

Leaving Cert Maths 145
-1.5 -1.0 -0.5 0.5 1.0 1.5
-1.0
-0.5
0.5
1.0
1.5
Figure 14.14: Even though the circle is not given as a function y = f(x); if it is in the form (x(t), y(t)),parametric differentiation can yield an the slope of the tangent at a point indexed or parameterised by t.
-2 2 4 6 8
Figure 14.15: A plot of a cubic function f(x) (top), its derivative f ′(x) (quadratic) and second derivativef ′′(x) (line). At the maxiumum and minimum f ′(x) = 0. At the local maximum the second derivative f ′′(x)is negative whilst at the local minimum the f ′′(x) > 0. Where f ′′(x) = 0 (and f ′(x) has a local min), thereis a point of inflection, where the graph changes from concave down to concave up.
The inferences made with respect to f ′′(x) in Figure 14.15 are in fact true and general and we have:

Leaving Cert Maths 146
Critical Point Test
Suppose f(x) is a function
• y = f(x) has a Local Max at x = k iff:
dy
dx(k) = 0 &
d2y
dx2(k) < 0 (14.45)
• y = f(x) has a Local Min at x = k iff:
dy
dx(k) = 0 &
d2y
dx2(k) > 0 (14.46)
• y = f(x) has a Point of Inflection at x = k iff:
d2y
dx2changes sign at k (14.47)
14.4.3 The Exponential Function & The Natural Logarithm
The Exponential Function
The Exponential Function may be defined in many different ways. Possibly the best way to think of it atLC level is to consider the following:
0.0 0.5 1.0 1.5 2.0
2
4
6
8
10
0.0 0.5 1.0 1.5 2.0
2
4
6
8
10
Figure 14.16: A plot of the functions ax and their derivatives for a = 1, 2, 3, 4. Observe the similarity betweenax and dax/dx.
As it turns out there is a very special number, e ≈ 2.718 given by:
e := limn→∞
(1 +
1
n
)n
=∞∑i=0
1
i!(14.48)
such that the function ex and its derivative are equal; that is:
d
dxex = ex
By the Fundamental Theorem of Calculus: ∫ex dx = ex + c (14.49)
The Natural Logarithm
The natural logarithm is the inverse of the exponential function. Suppose ea = b; then ln b = a. So ex andln are inverse in the sense:
ex = y ⇔ ln y = x (14.50)
From our tables we can see thatd
dxlnx =
1
x(14.51)

Leaving Cert Maths 147
Figure 14.17: The exponential and natural logarithm functions are inverse
However we can derive this as follows. Suppose
y = lnx
⇒ ey = x
⇒dx
eydy
dx= 1
⇒ dy
dx=
1
ey=
1
x
Obviously then ∫1
xdx ≡
∫dx
x= ln |x|+ c (14.52)
The absolute value sign is there because ln is only defined for strictly positive numbers. Note if we try touse the formula: ∫
xn dx =xn+1
n+ 1+ c (14.53)
for ∫1
xdx =
∫x−1 dx
⇒∫
1
xdx =
x0
0+ c
which is undefined.

Leaving Cert Maths 148
14.4.4 Differentiation of Trigonometric Functions
sin & cos
Consider the graphs of sin and cos:
-4 -2 2 4
-1.0
-0.5
0.5
1.0
Figure 14.18: The graphs of sinx and cosx (sin 0 = 0, cos 0 = 1)
d
dxsinx = cosx (14.54)
d
dxcosx = − sinx (14.55)
Inverse Trigonometric Functions
In the tables:
d
dxsin−1 x =
1√1− x2
(14.56)
d
dxtan−1 x =
1
1 + x2(14.57)
sin−1 x is that angle between ±90◦ whose sin is x. Beware in these cases of the chain rule.Example: If f(x) = sin−1(x/10), what is f ′(x)?
f ′(x) =1√
1− x2
100
· 1
10
⇒ f ′(x) =1√
100−x2
100
· 1
10
⇒ f ′(x) =1
√100−x2
�10· 1
��10=
1√100− x2

Leaving Cert Maths 149
14.4.5 Substitution Technique for Integration
In general, if we need to make a substitution, we look for the following pattern:∫f(g(x))g′(x) dx (14.58)
that is we look for a function and its derivative in the integrand. Then let u = g(x):
du
dx= g′(x)
⇒ dx =du
g′(x)
⇒∫
f(g(x))g′(x) dx =
∫f(u)���g′(x)
du
���g′(x)=
∫f(u) du
Examples
Spot the patterns: ∫2x2√x3 + 1 dx∫
t(5 + 3t2)8 dt∫x2ex
3
dx∫s2
5√7− 4s3 ds∫ √1 +
1
3x
dx
x2∫x2 sec2(x3 + 1) dx∫
sin2 x cosx dx
LIATE
If we cannot see a g(x), g′(x) pattern we can use the LIATE rule. Choose u according to the most complicatedexpression in the following hierarchy:
L ogarithms
I nverses (inverse sine, tan)
A lgebraic (polynomials in x)
T rigonometric
E xponential
In general this works well (also works for Integration by Parts).

Leaving Cert Maths 150
14.4.6 Areas under Curves
The Basics
By definition, the area of a function between x = a and x = b is the definite integral from a to b. Notehowever that areas under the x-axis will be computed to have negative area so if the function looks like:
-1.0 -0.5 0.5 1.0 1.5 2.0
-1.0
-0.5
0.5
Figure 14.19: The area under the curve from x = −1 to x = 2 will be the integral from x = −1 to 0, minusthe integral from x = 0 to 2.
Areas between Curves
Now consider
Figure 14.20: The area between f(x) and g(x) (shaded) is the area under f(x) less the area under g(x).
If f(x) ≥ g(x) for x ∈ [a, b] then, where Aba(f, g) is the area between f(x) and g(x) between x = a and
x = b:
Aba(f, g) =
∫ b
a
f(x) dx−∫ b
a
g(x) dx =
∫ b
a
(f(x)− g(x)) dx (14.59)
Note if f(x) ≥ g(x) then f(x)− g(x) is always positive so the problem of negative area doesn’t arise.

Leaving Cert Maths 151
Intersecting Curves
Suppose we want to find the area bound by two curves, e.g.:
-0.5 0.5 1.0 1.5
-0.5
0.5
1.0
1.5
Figure 14.21: The area enclosed between f(x) = x2 and g(x) =√x is bound inside the points where they
intersect: x = 0, 1
If the curves are y = f(x) and y = g(x); there intersections are the set of points such that:
f(x) = g(x) (14.60)
For example for f(x) = x2 and g(x) =√x, the intersections occur when
x2 =√x
⇒ x2 −√x = 0
⇒√x(x3/2 − 1) = 0
⇒ x = 0, 1
Hence the area enclosed between the curves is given by:∫ 1
0
(√x− x2) dx (14.61)

Leaving Cert Maths 152
14.5 Paper 2 Questions 1-3: 4 Need to Knows
14.5.1 Puzzles in g, f , c
Consider how a circle is constructed using a compass:
Figure 14.22: The critical feature of a circle is that every point is a fixed distance r away from a certainpoint: the centre.
Now if we fix an origin, then what points are on a circle of centre (h, k) and radius r?What does it take for a point (x, y) to be on/in the circle? Well the distance from (h, k) to (x, y) must
equal r: √(x− h)2 + (y − k)2 = r
⇒ (x− h)2 + (y − k)2 = r2
Now consider the set of points given by:
x2 + y2 + 2gx+ 2fy + c = 0 (14.62)
A rearrangement shows (adding g2 + f2 − c to both sides):
x2 + 2gx+ g2 + y2 + 2fy + f2 = g2 + f2 − c
⇒ (x+ g)2 + (y + f)2 =√g2 + f2 − c
That is (14.62) is the equation of a circle of centre (−g,−f) and radius√g2 + f2 − c.

Leaving Cert Maths 153
Figure 14.23: A circle of radius r and centre (h, k)
14.5.2 Tangents to Circles
When is a line a tangent to a circle?
Figure 14.24: The line is a tangent to the circle.
A line is a tangent to a circle when it touches the circle at one point only. There are two equivalentconditions to a line being a tangent to a circle:
Intersection Condition
Suppose
L ≡ y = mx+ c ⇔ f(x, y) = y −mx− c = 0
C ≡ (x− h)2 + (y − k)2 = r2 ⇔ g(x, y) = (x− h)2 + (y − k)2 − r2 = 0
are the equations of the line L and the circle C, then L is a tangent to C if
f(x, y) = g(x, y) (14.63)
has a unique solution.

Leaving Cert Maths 154
Perpendicular Distance Condition
If the perpendicular distance fromL ≡ ax+ by + c = 0 (14.64)
to the centre of a circle C, (h, k):|ah+ bk + c|√
a2 + b2(14.65)
is the radius of the circle, r, then L is a tangent to C.
Also there is a tangent theorem examinable of which I have a vector theoretic proof:
Tangent Theorem
The equation of the tangent to the circle x2 + y2 = r at the point x1x+ y1y = r2.Proof:
Figure 14.25: For (x, y) to be on the tangent line, c ·R=0, the vector from (x1, y1) to (x, y).
c is the vector from x1i+ y1j to xi+ yj:
c = (x− x1)i+ (y − y1)j
R = x1i+ y1j
⇒ T ≡ c ·R = 0
⇒ T ≡ (x− x1)x1 + (y − y1)y1 = 0
⇒ T ≡ x1x− x21 + y1y − y21 = 0
⇒ T ≡ x1x+ y1y = x21 + y21 = r2
�
14.5.3 Coordinate Geometry of the Line Formulae
We must understand the various formulae in the tables and how they apply:
Distance from a point to a Line
d =|ax1 + by1 + c|√
a2 + b2(14.66)
Note if we write L in the form
ay = bx+ c

Leaving Cert Maths 155
Figure 14.26: d is the perpendicular distance from p(x1, y1) to L ≡ ax+ by + c = 0.
the formula doesn’t apply: it is applied to:
bx− ay + c = 0
Angle between Two Lines
± m1 −m2
1 +m1m2(14.67)
Figure 14.27: m1 = tanA and m2 = tanB.
Division of a Line Segment
If a(x1, y1) and b(x2, y2) are two points, then there are two positions for a point p such that:
|ap| : |pb| = m : n , form,n ∈ R, m, n > 0 (14.68)
One position for p is on [ab]. In this case
p =
(mx2 + nx1
m+ n,my2 + ny1m+ n
)(14.69)

Leaving Cert Maths 156
The other position for p is on [ab] produced. In this case
p =
(mx2 − nx1
m− n,my2 − ny1m− n
)(14.70)
Figure 14.28: The division of the line segment [ab] in the ratio m : n internally and externally.
Concurrent Lines
Let
L ≡ ax+ by + c = 0
K ≡ px+ qy + r = 0
For any λ ∈ R,M ≡ ax+ by + c+ λ(px+ qy + r) = 0 (14.71)
is a line which passes through the point of intersection of L and K. This makes sense as if (x1, y1) is theintersection of L and K;
ax1 + by1 + c = 0
px1 + qy1 + r = 0
⇒ ax1 + by1 + c︸ ︷︷ ︸=0
+λ (px1 + qy1 + r)︸ ︷︷ ︸=0
= 0
⇒ (x1, y1) ∈ M

Leaving Cert Maths 157
Figure 14.29: Any line which passes through the point of intersection of L ≡ ax + by + c = 0 and K ≡px+ qy + r = 0 has form ax+ by + c+ λ(px+ qy + r) = 0 for some λ ∈ R
14.5.4 The Dot Product
Given two vectors a and b we may form a product a · b called the dot product which gives a number.Geometrically the dot product of a and b is the length of a, |a| multiplied by the perpendicular projectionof b onto a:
Figure 14.30: The dot product of two vectors a and b is a number a · b given by |a||b| cos θ, where θ is theangle between the vectors.
a · b = |a||b| cos θ (14.72)
It can be shown that if a = ax i+ ay j and b = bx i+ by j then
a · b = axbx + ayby (14.73)
Hence if a = ax i+ ay j and b = bx i+ by j are two vectors, the angle between them is given by:
cos θ =a · b|a||b|
(14.74)

Leaving Cert Maths 158
14.6 Paper 2: Q. 4,5 - Trigonometry 6 Need to Knows
14.6.1 The Unit Circle
Figure 14.31: The Unit Circle
The quadrants are signed in the mnemonic All Small Tin Cans:The boundary angles:
Angle 0◦ 90◦ 180◦ 270◦
sin 0 1 0 -1cos 1 0 -1 0tan 0 undefined 0 undefined

Leaving Cert Maths 159
Figure 14.32: The signs of the trigonometric functions in the four quadrants
14.6.2 Radians, Arcs & Sectors
Radians
Consider a circle of radius r as shown in Figure 14.33.
Figure 14.33: The arc shown has a length chosen to equal the radius; the angle is then 1 radian.

Leaving Cert Maths 160
Arc-Length
This definition may be used to find a formula for the length of an arbitrary arc. An angle of 1 radian issubtended by an arc of length r as illustrated in the Figure 14.33. By extension an angle of 2 radians willbe subtended by an arc of length 2r, as shown:
Figure 14.34: An angle of 2 radians is subtended by an arc of length 2r.
Note from these diagrams that the length of the arc is always given by the angle in radians θ times theradius. In the general case, the length s, of an arbitrary arc which subtends an angle θ is rθ as illustratedin Figure 14.35:
Figure 14.35: The arc length s, is given by rθ.
Area of a Sector
A sector of a circle with angle θ is shown shaded in Figure 14.36:
Figure 14.36: The shaded area is a sector of the circle.

Leaving Cert Maths 161
The ratio of the area of the sector to the area of the full circle will be the same as the ratio of the angleθ to the angle in a full circle. The full circle has area πr2. Therefore
area of sector
area of full circle=
θ
2π(14.75)
and so
area of sector =θ
2π× 2πr2 =
1
2r2θ (14.76)
14.6.3 Compound Angles
For example,
cos(A−B)
cos(A+B)
sin(A+B)
sin(A−B)
tan(A+B)
tan(A−B)
The proofs of these are contained in Chapter 12. Please compare the vector proof of the cos(A−B) formulathere with that in your book; whichever is easier to understand is the one to learn. Often these formulae areexamined (recently in 2007 and 2003): indeed they are on the list of examinable proofs.
2008: Q. 4 (a)
A and B are acute angles such that tanA = 5/12 and tanB = 3/4. Find cos(A−B) as a fraction.Solution:
cos(A−B) = cosA cosB + sinA sinB
Figure 14.37: The model triangles for A and B.
⇒ cos(A−B) =12
13· 45+
5
13· 35=
63
65
�

Leaving Cert Maths 162
2003: Q. 5 (a)
Find the value of sin 15◦ in surd form.Solution: 15◦ = 60◦ − 45◦
sin(60◦ − 45◦) = sin 60◦ cos 45◦ − cos 60◦ sin 45◦
Figure 14.38: The model triangles for 60◦ and 45◦.
sin 15◦ =
√3
2· 1√
2− 1
2· 1√
2=
√3− 1
2√2
=
√2(√3− 1)
4
�
2001: Q. 5 (c)(i)
A is an obtuse angle such that
sin(A+
π
6
)+ sin
(A− π
6
)=
4√3
5
Find sinA and tanASolution: Firstly
sin(A+B) + sin(A−B) = sinA cosB +(((((cosA sinB + sinA cosB −(((((
cosA sinB = 2 sinA cosB
⇒ sin(A+
π
6
)+ sin
(A− π
6
)= 2 sinA cos
π
6=
4√3
5
⇒ sin(A+
π
6
)+ sin
(A− π
6
)=
4��√3
5· 1
����2 cosπ/6=
4
5
⇒ tanA =4
3
�

Leaving Cert Maths 163
14.6.4 Double Angles
Again a series of formulae:
cos 2A = cos2 A− sin2 A
sin 2A = 2 sinA cosA
tan 2A =2 tanA
1− tan2 A
These formulae are derived from the compound angle formulae for:
cos(A+A)
sin(A+A)
tan(A+A)
2009: Q. 4 (b)(ii)
Find tanA/2 if cosA = 15/17Solution:

Leaving Cert Maths 164
2008: Q. 4 (b)
(i) Show thatsin 2A
1 + cos 2A= tanA (14.77)
(ii) Hence or otherwise, prove that
tan 22.5◦ =√2− 1
Solution:

Leaving Cert Maths 165
2004: Q. 4 (a)(ii)
A is an acute angle such that tanA = 8/15. Without evaluating A, find sin 2ASolution:

Leaving Cert Maths 166
14.6.5 Area of a Triangle
The area of a triangle:
is given by:
1
2.ab sinC
1
2ac sinB
1
2bc sinA
Proof : Drop a perpendicular to side b as shown:
Now
sinC =h
a⇒ h = a sinC
Using
Area =1
2base× perpendicular height
⇒ Area =1
2ab sinC
14.6.6 Sine & Cosine Rules
The proof of the Cosine Rule is examinable.
Theorem: The Cosine Rule
Let a triangle have sides of length a, b and c and suppose further that the angle opposite a is A. Then
a2 = b2 + c2 − 2bc cosA (14.78)

Leaving Cert Maths 167
Theorem: Sine Rule
If a triangle has angles A, B, C and respective opposite sides of length a, b, c, then
a
sinA=
b
sinB=
c
sinC(14.79)

Leaving Cert Maths 168
2009: Q. 4 (b)(i)
The lengths of a triangle are 21, 17 and 10. The smallest angle in the triangle is A. Show that cosA = 15/17Solution:

Leaving Cert Maths 169
2008: Q. 4 (c)(i)
In the triangle pqr, |∠rsq = θ|, |∠prs| = α, |rq| = 1, |ps| = 1 and |sq| = 1. Find |sr| in terms of θ
Solution:

Leaving Cert Maths 170
14.7 Key Elements of Paper 2
14.7.1 Probability
Probability is a measure of how likely some ‘event’ will happen if an observation/ experiment is made.Suppose A is the event that a dice rolls a 6. How likely is this event? The theory of probability looks at allthe possibilities:
1, 2, 3, 4, 5, 6 (14.80)
Now if each event, each outcome, is equally likely then the chance that a 6 is rolled is one in six. That is ifyou rolled six dice, you would expect a six. To put things on a more solid footing the probability of a certainevent A occurring, P (A) is given by:
P (A) =# ways A can happen
# all possible outcomes(14.81)