-
Learning to Share and Hide Intentions using
Information Regularization
DJ Strouse1, Max Kleiman-Weiner2, Josh Tenenbaum2
Matt Botvinick3,4, David Schwab5
1 Princeton University, 2 MIT, 3 DeepMind4 UCL, 5 CUNY Graduate
Center
Abstract
Learning to cooperate with friends and compete with foes is a
key componentof multi-agent reinforcement learning. Typically to do
so, one requires access toeither a model of or interaction with the
other agent(s). Here we show how to learneffective strategies for
cooperation and competition in an asymmetric informationgame with
no such model or interaction. Our approach is to encourage an
agentto reveal or hide their intentions using an
information-theoretic regularizer. Weconsider both the mutual
information between goal and action given state, as wellas the
mutual information between goal and state. We show how to optimize
theseregularizers in a way that is easy to integrate with policy
gradient reinforcementlearning. Finally, we demonstrate that
cooperative (competitive) policies learnedwith our approach lead to
more (less) reward for a second agent in two simpleasymmetric
information games.
1 Introduction
In order to effectively interact with others, an intelligent
agent must understand the intentions ofothers. In order to
successfully cooperate, collaborative agents that share their
intentions will doa better job of coordinating their plans together
[Tomasello et al., 2005]. This is especially salientwhen
information pertinent to a goal is known asymmetrically between
agents. When competingwith others, a sophisticated agent might aim
to hide this information from its adversary in order todeceive or
surprise them. This type of sophisticated planning is thought to be
a distinctive aspect ofhuman intelligence compared to other animal
species [Tomasello et al., 2005].
Furthermore, agents that share their intentions might have
behavior that is more interpretable andunderstandable by people.
Many reinforcement learning (RL) systems often plan in ways that
canseem opaque to an observer. In particular, when an agent’s
reward function is not aligned with thedesigner’s goal the intended
behavior often deviates from what is expected [Hadfield-Menell et
al.,2016]. If these agents are also trained to share high-level and
often abstract information about itsbehavior (i.e. intentions) it
is more likely a human operator or collaborator can understand,
predict,and explain that agents decision. This is key requirement
for building machines that people can trust.
Previous approaches have tackled aspects of this problem but all
share a similar structure [Draganet al., 2013, Ho et al., 2016,
Hadfield-Menell et al., 2016, Shafto et al., 2014]. They optimize
theirbehavior against a known model of an observer which has a
theory-of-mind [Baker et al., 2009,Ullman et al., 2009, Rabinowitz
et al., 2018] or is doing some form of inverse-RL [Ng et al.,
2000,Abbeel and Ng, 2004]. In this work we take an alternative
approach based on an information theoreticformulation of the
problem of sharing and hiding intentions. This approach does not
require anexplicit model of or interaction with the other agent,
which could be especially useful in settingswhere interactive
training is expensive or dangerous. Our approach also naturally
combines withscalable policy-gradient methods commonly used in deep
reinforcement learning.
32nd Conference on Neural Information Processing Systems
(NeurIPS 2018), Montréal, Canada.
-
2 Hiding and revealing intentions via information-theoretic
regularization
We consider multi-goal environments in the form of a
discrete-time finite-horizon discounted Markovdecision process
(MDP) defined by the tuple M ≡ (S,A,G, P, ρG, ρS , r, γ, T ), where
S is a stateset, A an action set, P : S × A × S → R+ a
(goal-independent) probability distribution overtransitions, G a
goal set, ρG : G → R+ a distribution over goals, ρS : S → R+ a
probabilitydistribution over initial states, r : S × G → R a
(goal-dependent) reward function γ ∈ [0, 1] adiscount factor, and T
the horizon.
In each episode, a goal is sampled and determines the reward
structure for that episode. One agent,Alice, will have access to
this goal and thus knowledge of the environment’s reward structure,
whilea second agent, Bob, will not and instead must infer it from
observing Alice. We assume thatAlice knows in advance whether Bob
is a friend or foe and wants to make his task easier or
harder,respectively, but that she has no model of him and must
train without any interaction with him.
Of course, Alice also wishes to maximize her own expected reward
η[π] = Eτ
[
∑T
t=0 γtr(st, g)
]
,
where τ = (g, s0, a0, s1, a1, . . . , sT ) denotes the episode
trajectory, g ∼ ρG, s0 ∼ ρS , at ∼πg(at | st), and st+1 ∼ P (st+1 |
st, at), and πg(a | s; θ) : G × S × A → R+ is Alice’s
goal-dependent probability distribution over actions (policy)
parameterized by θ.
It is common in RL to consider loss functions of the form J [π]
= η[π] + βℓ[π], where ℓ is aregularizer meant to help guide the
agent toward desirable solutions. For example, the policy entropyis
a common choice to encourage exploration [Mnih et al., 2016], while
pixel prediction and controlhave been proposed to encourage
exploration in visually rich environments with sparse
rewards[Jaderberg et al., 2017].
The setting we imagine is one in which we would like Alice to
perform well in a joint environment withrewards rjoint, but we are
only able to train her in a solo setting with rewards rsolo. How do
we makesure that Alice’s learned behavior in the solo environment
transfers well to the joint environment? Wepropose the training
objective Jtrain = E[rsolo] +βI (where I is some sort of
task-relevant informationmeasure) as a useful for proxy for the
test objective Jtest = E[rjoint]. The structure of rjoint
determineswhether the task is cooperative or competitive, and
therefore the appropriate sign of β. For example,in the spatial
navigation game of section 4.1, a competitive rjoint might provide
+1 reward only to thefirst agent to reach the correct goal (and -1
for reaching the wrong one), whereas a cooperative rjointmight
provide each of Alice and Bob with the sum of their individual
rewards. In figure 2, we plotrelated metrics, after training Alice
with Jtrain. On the bottom row, we plot the percentage of timeAlice
beats Bob to the goal (which is her expected reward for the
competitive rjoint). On the top row,we plot Bob’s expected time
steps per unit reward, relative to Alice’s. Their combined steps
per unitreward would be more directly related to the cooperative
rjoint described above, but we plot Bob’sindividual contribution
(relative to Alice’s), since his individual contribution to the
joint reward ratevaries dramatically with β, whereas Alice’s does
not. We note that one advantage of our approach isthat it unifies
cooperative and competitive strategies in the same one-parameter
(β) family.
Below, we will consider two different information regularizers
meant to encourage/discourageAlice from sharing goal information
with Bob: the (conditional) mutual information between goaland
action given state, Iaction[π] ≡ I(A;G | S), which we will call the
"action information", andthe mutual information between state and
goal, Istate[π] ≡ I(S;G), which we will call the
"stateinformation." Since the mutual information is a general
measure of dependence (linear and non-linear)between two variables,
Iaction and Istate measure the ease in inferring the goal from the
actions andstates, respectively, generated by the policy π. Thus,
if Alice wants Bob to do well, she should choosea policy with high
information, and vice versa if not.
We consider both action and state informations because they have
different advantages and disad-vantages. Using action information
assumes that Bob (the observer) can see both Alice’s states
andactions, which may be unrealistic in some environments, such as
one in which the actions are thetorques a robot applies to its
joint angles [Eysenbach et al., 2019]. Using state information
insteadonly assumes that Bob can observe Alice’s states (and not
actions), however it does so at the cost ofrequiring Alice to count
goal-dependent state frequencies under the current policy.
Optimizing actioninformation, on the other hand, does not require
state counting. So, in summary, action informationis simpler to
optimize, but state information may be more appropriate to use in a
setting where anobserver can’t observe (or infer) the observee’s
actions.
2
-
The generality with which mutual information measures dependence
is at once its biggest strengthand weakness. On the one hand, using
information allows Alice to prepare for interaction withBob with
neither a model of nor interaction with him. On the other hand, Bob
might have limitedcomputational resources (for example, perhaps his
policy is linear with respect to his observations ofAlice) and so
he may not be able to “decode” all of the goal information that
Alice makes availableto him. Nevertheless, Iaction and Istate can
at least be considered upper bounds on Bob’s inferenceperformance;
if Iaction = 0 or Istate = 0, it would be impossible for Bob to
guess the goal (abovechance) from Alice’s actions or states,
respectively, alone.
Optimizing information can be equivalent to optimizing reward
under certain conditions, such asin the following example. Consider
Bob’s subtask of identifying the correct goal in a 2-goal setup.If
his belief over the goal is represented by p(g), then he should
guess g∗ = argmaxgp(g), which
results in error probability perr = 1−maxg p(g). Since the
binary entropy function H(g) ≡ H[p(g)]increases monotonically with
perr, optimizing one is equivalent to optimizing the other.
Denoting theparts of Alice’s behavior observable by Bob as x, then
H(g | x) is the post-observation entropy inBob’s beliefs, and
optimizing it is equivalent to optimizing I(g;x) = H(g) −H(g | x),
since thepre-observation entropy H(g) is not dependent on Alice’s
behavior. If Bob receives reward r whenidentifying the right goal,
and 0 otherwise, then his expected reward is (1− perr) r. Thus, in
thissimplified setup, optimizing information is directly related to
optimizing reward. In general, whenone considers the temporal
dynamics of an episode, more than two goals, or more complicated
rewardstructures, the relationship becomes more complicated.
However, information is useful in abstractingaway that complexity,
and preparing Alice generically for a plethora of possible task
setups.
2.1 Optimizing action information: Iaction ≡ I(A;G | S)
First, we discuss regularization via optimizing the mutual
information between goal and action(conditioned on state), Iaction
≡ I(A;G | S), where G is the goal for the episode, A is the
chosenaction, and S is the state of the agent. That is, we will
train an agent to maximize the objectiveJaction[π] ≡ E[r] +
βIaction, where β is a tradeoff parameters whose sign determines
whether we wantthe agent to signal (positive) or hide (negative)
their intentions, and whose magnitude determines therelative
preference for rewards and intention signaling/hiding.
Iaction is a functional of the multi-goal policy πg(a | s) ≡ p(a
| s, g), that is the probability distributionover actions given the
current goal and state, and is given by:
Iaction ≡ I(A;G | S) =∑
s
p(s) I(A;G | S = s) (1)
=∑
g
ρG(g)∑
s
p(s | g)∑
a
πg(a | s) logπg(a | s)
p(a | s). (2)
The quantity involving the sum over actions is a KL divergence
between two distributions: the goal-dependent policy πg(a | s) and
a goal-independent policy p(a | s). This goal-independent
policycomes from marginalizing out the goal, that is p(a | s) =
∑
g ρG(g)πg(a | s), and can be thought ofas a fictitious policy
that represents the agent’s “habit” in the absence of knowing the
goal. We willdenote π0(a | s) ≡ p(a | s) and refer to it as the
“base policy,” whereas we will refer to πg(a | s) assimply the
“policy.” Thus, we can rewrite the information above as:
Iaction =∑
g
ρG(g)∑
s
p(s | g)KL[πg(a | s) | π0(a | s)] = Eτ [KL[πg(a | s) | π0(a |
s)]] . (3)
Writing the information this way suggests a method for
stochastically estimating it. First, we samplea goal g from p(g),
that is we initialize an episode of some task. Next, we sample
states s fromp(s | g), that is we generate state trajectories using
our policy πg(a | s). At each step, we measurethe KL between the
policy and the base policy. Averaging this quantity over episodes
and steps giveus our estimate of Iaction.
Optimizing Iaction with respect to the policy parameters θ is a
bit trickier, however, because theexpectation above is with respect
to a distribution that depends on θ. Thus, the gradient of Iaction
with
3
-
Algorithm 1 Action information regularized REINFORCE with value
baseline.
Input: β, ρG, γ, and ability to sample MDP MInitialize π,
parameterized by θInitialize V , parameterized by φfor i = 1 to
Nepisodes do
Generate trajectory τ = (g, s0, a0, s1, a1, . . . , sT )for t =
0 to T − 1 do
Update policy in direction of ∇θJaction(t) using equation 6
Update value in direction of −∇φ
(
Vg(st)− R̃t
)2
with r̃(t) according to equation 7
end forend for
respect to θ has two terms:
∇θIaction =∑
g
ρG(g)∑
s
(∇θp(s | g))KL[πg(a | s) | π0(a | s)] (4)
+∑
g
ρG(g)∑
s
p(s | g)∇θKL[πg(a | s) | π0(a | s)] . (5)
The second term involves the same sum over goals and states as
in equation 3, so it can be written asan expectation over
trajectories, Eτ [∇θKL[πg(a | s) | π0(a | s)]], and therefore is
straightforward toestimate from samples. The first term is more
cumbersome, however, since it requires us to model (thepolicy
dependence of) the goal-dependent state probabilities, which in
principle involves knowingthe dynamics of the environment. Perhaps
surprisingly, however, the gradient can still be estimatedpurely
from sampled trajectories, by employing the so-called “log
derivative” trick to rewrite the termas an expectation over
trajectories. The calculation is identical to the proof of the
policy gradienttheorem [Sutton et al., 2000], except with reward
replaced by the KL divergence above.
The resulting Monte Carlo policy gradient (MCPG) update is:
∇θJaction(t) =Aaction(t)∇θ log πg(at | st) + β∇θKL[πg(a | st) |
π0(a | st)] , (6)
where Aaction(t) ≡ R̃t − Vg(st) is a modified advantage, Vg(st)
is a goal-state value function
regressed toward R̃t, R̃t =∑T
t′=t γ
t′
−tr̃t′ is a modified return, and the following is the
modifiedreward feeding into that return:
r̃t ≡ rt + βKL[πg(a | st) | π0(a | st)] . (7)
The second term in equation 6 encourages the agent to alter the
policy to share or hide information inthe present state. The first
term, on the other hand, encourages modifications which lead the
agent tostates in the future which result in reward and the sharing
or hiding of information. Together, thisoptimizes Jaction. This
algorithm is summarized in algorithm 2.1.
2.2 Optimizing state information: Istate ≡ I(S;G)
We now consider how to regularize an agent by the information
one’s states give away about the goal,using the mutual information
between state goal, Istate ≡ I(S;G). This can be written:
Istate =∑
g
ρG(g)∑
s
p(s | g) logp(s | g)
p(s)= Eτ
[
logp(s | g)
p(s)
]
. (8)
In order to estimate this quantity, we could track and plug into
the above equation the empirical
state frequencies pemp(s | g) ≡Ng(s)Ng
and pemp(s) ≡N(s)N
, where Ng(s) is the number of times
state s was visited during episodes with goal g, Ng ≡∑
s Ng(s) is the total number of steps takenunder goal g, N(s)
≡
∑
g Ng(s) is the number of times state s was visited across all
goals, and
N ≡∑
g,s Ng(s) =∑
g Ng =∑
s N(s) is the total number of state visits across all goals and
states.
Thus, keeping a moving average of logpemp(st|g)pemp(st)
across episodes and steps yields an estimate of Istate.
4
-
Algorithm 2 State information regularized REINFORCE with value
baseline.
Input: β, ρG, γ, and ability to sample MDP MInitialize π,
parameterized by θInitialize V , parameterized by φInitialize the
state counts Ng(s)for i = 1 to Nepisodes do
Generate trajectory τ = (g, s0, a0, s1, a1, . . . , sT )Update
Ng(s) (and therefore pemp(s | g)) according to τfor t = 0 to T − 1
do
Update policy in direction of ∇θJstate(t) using equation 11
Update value in direction of −∇φ
(
Vg(st)− R̃t
)2
with r̃(t) according to equation 12
end forend for
However, we are of course interested in optimizing Istate and
so, as in the last section, we need toemploy a slightly more
sophisticated estimate procedure. Taking the gradient of Istate
with respect tothe policy parameters θ, we get:
∇θIstate =∑
g
ρG(g)∑
s
(∇θp(s | g)) logp(s | g)
p(s)(9)
+∑
g
ρG(g)∑
s
p(s | g)
(
∇θp(s | g)
p(s | g)−
∇θp(s)
p(s)
)
. (10)
The calculation is similar to that for evaluating ∇θIaction and
details can be found in section S1. Theresulting MCPG update
is:
∇θJstate(t) =Astate(t)∇θ log πg(at | st)− β∑
g′ 6=g
ρG
(
g′
)
Rcf
(
t, g, g′
)
∇θ log πg′ (at | st) , (11)
where Astate(t) ≡ R̃t−Vg(st) is a modified advantage, Vg(st) is
a goal-state value function regressed
toward R̃t, R̃t ≡∑T
t′=t γ
t′
−tr̃t′ is a modified return, Rcf
(
t, g, g′
)
≡∑T
t′=t γ
t′
−trcf
(
t′
, g, g′
)
is
a “counterfactual goal return”, and the following are a modified
reward and a “counterfactual goalreward”, respectively, which feed
into the above returns:
r̃t ≡ rt + β
(
1− pemp(g | st) + logpemp(st | g)
pemp(st)
)
(12)
rcf
(
t, g, g′
)
≡
t∏
t′=0
πg′ (at′ | st′ )
πg(at′ | st′ )
pemp(st | g)
pemp(st), (13)
where pemp(g | st) ≡ ρG(g)pemp(st|g)pemp(st)
. The modified reward can be viewed as adding a “state
uniqueness bonus” logpemp(st|g)pemp(st)
that tries to increase the frequency of the present state under
the
present goal to the extent that the present state is more common
under the present goal. If the presentstate is less common than
average under the present goal, then this bonus becomes a penalty.
Thecounterfactual goal reward, on the other hand, tries to make the
present state less common under other
goals, and is again scaled by uniqueness under the present
goalpemp(st|g)pemp(st)
. It also includes importance
sampling weights to account for the fact that the trajectory was
generated under the current goal, butthe policy is being modified
under other goals. This algorithm is summarized in algorithm
2.2.
3 Related work
Whye Teh et al. [2017] recently proposed an algorithm similar to
our action information regularizedapproach (algorithm 2.1), but
with very different motivations. They argued that constraining
goal-specific policies to be close to a distilled base policy
promotes transfer by sharing knowledge
5
-
across goals. Due to this difference in motivation, they only
explored the β < 0 regime (i.e. our“competitive” regime). They
also did not derive their update from an information-theoretic
costfunction, but instead proposed the update directly. Because of
this, their approach differs in that it didnot include the β∇θKL[πg
| π0] term, and instead only included the modified return.
Moreover, theydid not calculate the full KLs in the modified
return, but instead estimated them from single samples
(e.g. KL[πg(a | st) | π0(a | st)] ≈ logπg(at|st)π0(at|st)
). Nevertheless, the similarity in our approaches
suggest a link between transfer and competitive strategies,
although we do not explore this here.
Eysenbach et al. [2019] also recently proposed an algorithm
similar to ours, which used both Istateand Iaction but with the
“goal” replaced by a randomly sampled “skill” label in an
unsupervised setting(i.e. no reward). Their motivation was to learn
a diversity of skills that would later would be usefulfor a
supervised (i.e. reward-yielding) task. Their approach to
optimizing Istate differs from ours inthat it uses a discriminator,
a powerful approach but one that, in our setting, would imply a
morespecific model of the observer which we wanted to avoid.
Tsitsiklis and Xu [2018] derive an inverse tradeoff between an
agent’s delay in reaching a goal andthe ability of an adversary to
predict that goal. Their approach relies on a number of
assumptionsabout the environment (e.g. agent’s only source of
reward is reaching the goal, opponent onlyneed identify the correct
goal and not reach it as well, nearly uniform goal distribution),
but issuggestive of the general tradeoff. It is an interesting open
question as to under what conditions ourinformation-regularized
approach achieves the optimal tradeoff.
Dragan et al. [2013] considered training agents to reveal their
goals (in the setting of a robot graspingtask), but did so by
building an explicit model of the observer. Ho et al. [2016] uses a
similarmodel to capture human generated actions that “show” a goal
also using an explicit model of theobserver. There is also a long
history of work on training RL agents to cooperate and
competethrough interactive training and a joint reward (e.g.
[Littman, 1994, 2001, Kleiman-Weiner et al.,2016, Leibo et al.,
2017, Peysakhovich and Lerer, 2018, Hughes et al., 2018]), or
through modelingone’s effect on another agent’s learning or
behavior (e.g. [Foerster et al., 2018, Jaques et al., 2018]).Our
approach differs in that it requires neither access to an
opponent’s rewards, nor even interactionwith or a model of the
opponent. Without this knowledge, one can still be cooperative
(competitive)with others by being as (un)clear as possible about
one’s own intentions. Our work achieves this bydirectly optimizing
information shared.
4 Experiments
We demonstrate the effectiveness of our approach in two stages.
First, we show that training Alice(who has access to the goal of
the episode) with information regularization effectively
encouragesboth goal signaling and hiding, depending on the sign of
the coefficient β. Second, we showthat Alice’s goal signaling and
hiding translate to higher and lower rates of reward acquisitionfor
Bob (who does not have access to the goal and must infer it from
observing Alice), respec-tively. We demonstrate these results in
two different simple settings. Our code is available
athttps://github.com/djstrouse/InfoMARL.
4.1 Spatial navigation
The first setting we consider is a simple grid world spatial
navigation task, where we can fullyvisualize and understand Alice’s
regularized policies. The 5× 5 environment contains two
possiblegoals: the top left state or the top right. On any given
episode, one goal is chosen randomly (soρG is uniform) and that
goal state is worth +1 reward. The other goal state is then worth
−1. Bothare terminal. Each of Alice and Bob spawn in a random
(non-terminal) state and take actions inA = {left, right, up, down,
stay}. A step into a wall is equivalent to the stay action but
results in apenalty of −.1 reward. We first train Alice alone, and
then freeze her parameters and introduce Bob.
Alice was trained using implementations of algorithms 2.1 and
2.2 in TensorFlow [Abadi et al.,2016]. Given the small, discrete
environment, we used tabular representations for both π and V .
Seesection S2.1 for training parameters.
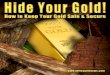
Examples of Alice’s resulting policies are shown in figure 1.
The top row contains policies regularizedwith Iaction, the bottom
with Istate. The left column contains “cooperative” policies
encouraged toshare goal information (β = .025), the middle
“ambivalent” policies that are unregularized (β = 0),
6
-
logp (s | g)
p
(s)AAACGnicbZDLSsNAFIYn9VbrLerSzWAR6qYkRVB3BTcuKxhbaEKZTCfp0MmFmROhhL6HG1/FjQsVd+LGt3HSBtTWHwZ+vnMOZ87vp4IrsKwvo7Kyura+Ud2sbW3v7O6Z+wd3KskkZQ5NRCJ7PlFM8Jg5wEGwXioZiXzBuv74qqh375lUPIlvYZIyLyJhzANOCWg0MFuuSEI3kITmqStYAA3lRnyIQ1fycASn0x9cgtrArFtNaya8bOzS1FGpzsD8cIcJzSIWAxVEqb5tpeDlRAKngk1rbqZYSuiYhKyvbUwiprx8dtsUn2gyxEEi9YsBz+jviZxESk0iX3dGBEZqsVbA/2r9DIILL+dxmgGL6XxRkAkMCS6CwkMuGQUx0YZQyfVfMR0RHRToOIsQ7MWTl43Tal427Zuzetsq06iiI3SMGshG56iNrlEHOYiiB/SEXtCr8Wg8G2/G+7y1YpQzh+iPjM9v62OheA==AAACGnicbZDLSsNAFIYn9VbrLerSzWAR6qYkRVB3BTcuKxhbaEKZTCfp0MmFmROhhL6HG1/FjQsVd+LGt3HSBtTWHwZ+vnMOZ87vp4IrsKwvo7Kyura+Ud2sbW3v7O6Z+wd3KskkZQ5NRCJ7PlFM8Jg5wEGwXioZiXzBuv74qqh375lUPIlvYZIyLyJhzANOCWg0MFuuSEI3kITmqStYAA3lRnyIQ1fycASn0x9cgtrArFtNaya8bOzS1FGpzsD8cIcJzSIWAxVEqb5tpeDlRAKngk1rbqZYSuiYhKyvbUwiprx8dtsUn2gyxEEi9YsBz+jviZxESk0iX3dGBEZqsVbA/2r9DIILL+dxmgGL6XxRkAkMCS6CwkMuGQUx0YZQyfVfMR0RHRToOIsQ7MWTl43Tal427Zuzetsq06iiI3SMGshG56iNrlEHOYiiB/SEXtCr8Wg8G2/G+7y1YpQzh+iPjM9v62OheA==AAACGnicbZDLSsNAFIYn9VbrLerSzWAR6qYkRVB3BTcuKxhbaEKZTCfp0MmFmROhhL6HG1/FjQsVd+LGt3HSBtTWHwZ+vnMOZ87vp4IrsKwvo7Kyura+Ud2sbW3v7O6Z+wd3KskkZQ5NRCJ7PlFM8Jg5wEGwXioZiXzBuv74qqh375lUPIlvYZIyLyJhzANOCWg0MFuuSEI3kITmqStYAA3lRnyIQ1fycASn0x9cgtrArFtNaya8bOzS1FGpzsD8cIcJzSIWAxVEqb5tpeDlRAKngk1rbqZYSuiYhKyvbUwiprx8dtsUn2gyxEEi9YsBz+jviZxESk0iX3dGBEZqsVbA/2r9DIILL+dxmgGL6XxRkAkMCS6CwkMuGQUx0YZQyfVfMR0RHRToOIsQ7MWTl43Tal427Zuzetsq06iiI3SMGshG56iNrlEHOYiiB/SEXtCr8Wg8G2/G+7y1YpQzh+iPjM9v62OheA==AAACGnicbZDLSsNAFIYn9VbrLerSzWAR6qYkRVB3BTcuKxhbaEKZTCfp0MmFmROhhL6HG1/FjQsVd+LGt3HSBtTWHwZ+vnMOZ87vp4IrsKwvo7Kyura+Ud2sbW3v7O6Z+wd3KskkZQ5NRCJ7PlFM8Jg5wEGwXioZiXzBuv74qqh375lUPIlvYZIyLyJhzANOCWg0MFuuSEI3kITmqStYAA3lRnyIQ1fycASn0x9cgtrArFtNaya8bOzS1FGpzsD8cIcJzSIWAxVEqb5tpeDlRAKngk1rbqZYSuiYhKyvbUwiprx8dtsUn2gyxEEi9YsBz+jviZxESk0iX3dGBEZqsVbA/2r9DIILL+dxmgGL6XxRkAkMCS6CwkMuGQUx0YZQyfVfMR0RHRToOIsQ7MWTl43Tal427Zuzetsq06iiI3SMGshG56iNrlEHOYiiB/SEXtCr8Wg8G2/G+7y1YpQzh+iPjM9v62OheA==
KL[πg |
π0]AAACE3icbZBNS8NAEIY3ftb6FfXoJVoEQSiJCOqt4EXQQwVjC00om+2kXbr5YHcilpAf4cW/4sWDilcv3vw3pmkO2vrCwsM7M8zO68WCKzTNb21ufmFxabmyUl1dW9/Y1Le271SUSAY2i0Qk2x5VIHgINnIU0I4l0MAT0PKGF+N66x6k4lF4i6MY3ID2Q+5zRjG3uvqRg/CA6dV15uw5AnzsODHvpv3MCXivQDNzJO8P0K129ZpZNwsZs2CVUCOlml39y+lFLAkgRCaoUh3LjNFNqUTOBGRVJ1EQUzakfejkGNIAlJsWR2XGQe70DD+S+QvRKNzfEykNlBoFXt4ZUByo6drY/K/WSdA/c1MexglCyCaL/EQYGBnjhIwel8BQjHKgTPL8rwYbUEkZ5jmOQ7CmT54F+7h+XrduTmoNs0yjQnbJPjkkFjklDXJJmsQmjDySZ/JK3rQn7UV71z4mrXNaObND/kj7/AHQc57QAAACE3icbZBNS8NAEIY3ftb6FfXoJVoEQSiJCOqt4EXQQwVjC00om+2kXbr5YHcilpAf4cW/4sWDilcv3vw3pmkO2vrCwsM7M8zO68WCKzTNb21ufmFxabmyUl1dW9/Y1Le271SUSAY2i0Qk2x5VIHgINnIU0I4l0MAT0PKGF+N66x6k4lF4i6MY3ID2Q+5zRjG3uvqRg/CA6dV15uw5AnzsODHvpv3MCXivQDNzJO8P0K129ZpZNwsZs2CVUCOlml39y+lFLAkgRCaoUh3LjNFNqUTOBGRVJ1EQUzakfejkGNIAlJsWR2XGQe70DD+S+QvRKNzfEykNlBoFXt4ZUByo6drY/K/WSdA/c1MexglCyCaL/EQYGBnjhIwel8BQjHKgTPL8rwYbUEkZ5jmOQ7CmT54F+7h+XrduTmoNs0yjQnbJPjkkFjklDXJJmsQmjDySZ/JK3rQn7UV71z4mrXNaObND/kj7/AHQc57QAAACE3icbZBNS8NAEIY3ftb6FfXoJVoEQSiJCOqt4EXQQwVjC00om+2kXbr5YHcilpAf4cW/4sWDilcv3vw3pmkO2vrCwsM7M8zO68WCKzTNb21ufmFxabmyUl1dW9/Y1Le271SUSAY2i0Qk2x5VIHgINnIU0I4l0MAT0PKGF+N66x6k4lF4i6MY3ID2Q+5zRjG3uvqRg/CA6dV15uw5AnzsODHvpv3MCXivQDNzJO8P0K129ZpZNwsZs2CVUCOlml39y+lFLAkgRCaoUh3LjNFNqUTOBGRVJ1EQUzakfejkGNIAlJsWR2XGQe70DD+S+QvRKNzfEykNlBoFXt4ZUByo6drY/K/WSdA/c1MexglCyCaL/EQYGBnjhIwel8BQjHKgTPL8rwYbUEkZ5jmOQ7CmT54F+7h+XrduTmoNs0yjQnbJPjkkFjklDXJJmsQmjDySZ/JK3rQn7UV71z4mrXNaObND/kj7/AHQc57QAAACE3icbZBNS8NAEIY3ftb6FfXoJVoEQSiJCOqt4EXQQwVjC00om+2kXbr5YHcilpAf4cW/4sWDilcv3vw3pmkO2vrCwsM7M8zO68WCKzTNb21ufmFxabmyUl1dW9/Y1Le271SUSAY2i0Qk2x5VIHgINnIU0I4l0MAT0PKGF+N66x6k4lF4i6MY3ID2Q+5zRjG3uvqRg/CA6dV15uw5AnzsODHvpv3MCXivQDNzJO8P0K129ZpZNwsZs2CVUCOlml39y+lFLAkgRCaoUh3LjNFNqUTOBGRVJ1EQUzakfejkGNIAlJsWR2XGQe70DD+S+QvRKNzfEykNlBoFXt4ZUByo6drY/K/WSdA/c1MexglCyCaL/EQYGBnjhIwel8BQjHKgTPL8rwYbUEkZ5jmOQ7CmT54F+7h+XrduTmoNs0yjQnbJPjkkFjklDXJJmsQmjDySZ/JK3rQn7UV71z4mrXNaObND/kj7/AHQc57Q
ac
tio
n
reg
ula
rize
d
sta
te
reg
ula
rize
d
cooperative competitiveambivalent
Figure 1: Information-regularized policies. Top row:
regularization with Iaction. Bottom row:regularization with Istate.
Left column: β = .025. Center column: β = 0. Right column: β =
.025.See main text for additional details.
and the right “competitive” policies encouraged to hide goal
information (β = −.025). In each case,two policies are shown - at
left, the policy when the goal is in the top left, and at right,
when it is inthe top right. The arrows are proportional to Alice’s
action probabilities. The color scale indicates
KL[πg | π0] and logpemp(s|g)pemp(s)
in bits for action and state information regularization,
respectively. Thus,
bluer indicates more goal information shared in that state.
In the cooperative case with action information regularization,
Alice wants to maximize KL[πg | π0]and thus she wants her
goal-dependent policies to differ as much as possible. This
primarily resultsin her going left in most states when the goal is
in the top left, and right when its in the top right.She can also
choose to have some probability of going up in those states, as
long as she only doesso under one goal or the other and not both.
Ultimately this means that no matter what state Alicespawns in, she
immediately signals the goal with her very first action, and
continues to do so witheach subsequent action.
In the competitive case with action information regularization,
Alice instead wants to minimizeKL[πg | π0] and thus she wants her
goal-dependent policies to match as much as possible. In thepresent
case, this means that she chooses to go up as far as she can until
she must pivot in order tostill reach the goal in the minimal
number of steps. This leads to her hiding the goal for as long
aspossible without sacrificing reward.
Without information regularization, Alice’s policy is a random
mixture of the competitive andcooperative strategies, the details
of which are determined by initialization and the randomness
oftraining trajectories. Regularization with state information
yields similar policies to those generatedwith action information
in all three cases, since in this deterministic setting, different
action choicesare tightly coupled with different state
trajectories.
To demonstrate that Alice’s goal revealing and hiding behaviors
are useful for cooperation andcompetition, respectively, we then
trained a second agent, Bob, who does not have access to the
goaland instead must infer it from observing Alice. Thus, while
Alice’s inputs at time t were the presentgoal g and her state
salicet , Bob’s are Alice’s present state and action s
alicet and a
alicet , as well as his
own state sbobt . Details are available in section S2.1, but in
brief, Bob processes Alice’s state-actiontrajectories with an RNN
to form a belief about the goal, which then feeds into his policy,
all of whichis trained end-to-end via REINFORCE.
We trained 5 of each of the 3 versions of Alice above, and 10
Bobs per Alice. We plot the results forthe best performing Bob for
each Alice (so 5 × 3 = 15 curves) in figure 2. We use all 5 Alices
toestimate the variance in our approach, but the best-of-10 Bob to
provide a reasonable estimate of thebest performance of a
friend/foe.
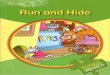
We measure Bob’s performance in terms of his episode length,
relative to Alice’s, as well as thepercentage of time he beats
Alice to the goal. For both action and state information
regularization,encouraging Alice to hide goal information leads to
Bob taking about 30% longer to reach the goalrelative to when Alice
is encouraged to share goal information. Information-hiding Alice
receives aboost of similar magnitude in the frequency with which
she beats Bob to the goal. Training withoutinformation
regularization leads to results in between the competitive and
cooperative strategies,
7
-
action regularized state regularized
Figure 2: The effect of Alice hiding/sharing goal information on
Bob’s performance. Leftcolumn: regularization with Iaction. Right
column: regularization with Istate. Top row: Bob’s episodelength
relative to Alice’s (moving average over 500 episodes). Bottom row:
the percentage of timeAlice beats Bob to the goal (moving average
over 1000 episodes).
although closer to the cooperative strategy in this case. We
also note that the variance in Bob’sperformance was higher for the
unregularized case, and much higher for the competitive case,
withnearly zero variance in performance for the cooperative case,
indicating that information hiding andsharing make training harder
and easier, respectively.
4.2 Key-and-door game
In the above spatial navigation task, information regularization
of Alice breaks symmetries betweenequally-preferred (in terms of
reward) navigation strategies. However, in many scenarios, it
mightbe worthwhile for an agent to give up some reward if it means
large gains in the ability to hide orshare information. To
demonstrate that our approach could also discover such “lossy”
strategies, wedesigned a simple key-and-door game with this feature
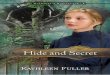
(figure 3, left).
It is again a two-goal (door) game with the same action space
and reward structure as the spatialnavigation setting. Alice again
alone receives the goal, and Bob must infer it from observing her.
Thedifference is that, in order to enter the terminal states, Alice
and Bob must first pick up an appropriatekey. Each agent has
goal-specific keys that only they can pick up (top/bottom rows,
color-coded todoor, labeled with A/B for Alice/Bob). Alice also has
access to a master key that can open both doors(center right).
Agents can only pick up one key per episode - the first they
encounter. Bob spawns inthe same location every time (the “B”),
while Alice spawns in any of the 3 spaces between her
twogoal-specific keys (the “A” and spaces above/below). This means
that Bob has a shorter path to thegoals, and thus if Alice
telegraphs the goal right away, Bob will beat her to it. While
Alice’s masterkey is strictly on a longer path to the goal, picking
it up allows her to delay informing Bob of the goalsuch that she
can beat him to it.
We trained Alice with action information regularization as in
the previous section (see section S2.2for training parameters).
When unregularized or encouraged to share goal information (β =
.25),Alice simply took the shortest path to the goal, never picking
up the master key. When Bob wastrained on these Alices, he
beat/tied her to the goal on approximately 100% of episodes (figure
3,right). When encouraged to hide information (β = −.25), however,
we found that Alice learned totake the longer path via the master
key on about half of initializations (example in figure 3,
center).When Bob was trained on these Alices, he beat/tied her to
the goal much less than half the time(figure 3, right). Thus, our
approach successfully encourages Alice us to forgo rewards during
solotraining in order to later compete more effectively in an
interactive setting.
8
-
B
B
A
A
B AA
Figure 3: Key-and-door game results. Left: depiction of game.
Center: percentage episodes inwhich Alice picks up goal-specific vs
master key during training in an example run (moving averageover
100 episodes). Right: percentage episodes in which Bob beats/tie
Alice to the goal (movingaverage over 1000 episodes).
5 Discussion
In this work, we developed a new framework for building agents
that balance reward-seeking withinformation-hiding/sharing
behavior. We demonstrate that our approach allows agents to
learneffective cooperative and competitive strategies in asymmetric
information games without an explicitmodel or interaction with the
other agent(s). Such an approach could be particularly useful in
settingswhere interactive training with other agents could be
dangerous or costly, such as the training ofexpensive robots or the
deployment of financial trading strategies.
We have here focused on simple environments with discrete and
finite states, goals, and actions,and so we briefly describe how to
generalize our approach to more complex environments.
Whenoptimizing Iaction with many or continuous actions, one could
stochastically approximate the actionsum in KL[πg | π0] and its
gradient (as in [Whye Teh et al., 2017]). Alternatively, one could
choose aform for the policy πg and base policy π0 such that the KL
is analytic. For example, it is common forπg to be Gaussian when
actions are continuous. If one also chooses to use a Gaussian
approximationfor π0 (forming a variational bound on Iaction), then
KL[πg | π0] is closed form. For optimizing Istatewith continuous
states, one can no longer count states exactly, so these counts
could be replacedwith, for example, a pseudo-count based on an
approximate density model. [Bellemare et al., 2016,Ostrovski et
al., 2017] Of course, for both types of information regularization,
continuous states oractions also necessitate using function
approximation for the policy representation. Finally, althoughwe
have assumed access to the goal distribution ρG, one could also
approximate it from experience.
Acknowledgements
The authors would like to acknowledge Dan Roberts and our
anonymous reviewers for carefulcomments on the original draft; Jane
Wang, David Pfau, and Neil Rabinowitz for discussions on
theoriginal idea; and funding from the Hertz Foundation (DJ and
Max), The Center for Brain, Minds andMachines (NSF #1231216) (Max
and Josh), the NSF Center for the Physics of Biological
Function(PHY-1734030) (David), and as a Simons Investigator in the
MMLS (David).
References
Martín Abadi, Paul Barham, Jianmin Chen, Zhifeng Chen, Andy
Davis, Jeffrey Dean, MatthieuDevin, Sanjay Ghemawat, Geoffrey
Irving, Michael Isard, Manjunath Kudlur, Josh Levenberg,Rajat
Monga, Sherry Moore, Derek G. Murray, Benoit Steiner, Paul Tucker,
Vijay Vasudevan, PeteWarden, Martin Wicke, Yuan Yu, and Xiaoqiang
Zheng. Tensorflow: A system for large-scalemachine learning. In
Proceedings of the 12th USENIX Conference on Operating Systems
Designand Implementation, 2016.
Pieter Abbeel and Andrew Y Ng. Apprenticeship learning via
inverse reinforcement learning. InProceedings of the Twenty-First
International Conference on Machine Learning (ICML), 2004.
Chris L Baker, Rebecca Saxe, and Joshua B Tenenbaum. Action
understanding as inverse planning.Cognition, 113(3):329–349,
2009.
9
-
Marc Bellemare, Sriram Srinivasan, Georg Ostrovski, Tom Schaul,
David Saxton, and Remi Munos.Unifying count-based exploration and
intrinsic motivation. In Advances in Neural InformationProcessing
Systems (NIPS) 29, pages 1471–1479. 2016.
Kyunghyun Cho, Bart van Merrienboer, Çaglar Gülçehre, Dzmitry
Bahdanau, Fethi Bougares, HolgerSchwenk, and Yoshua Bengio.
Learning Phrase Representations using RNN Encoder-Decoder
forStatistical Machine Translation. In Proceedings of the 2014
Conference on Empirical Methods inNatural Language Processing
(EMNLP), pages 1724–1734, 2014.
Anca D. Dragan, Kenton C.T. Lee, and Siddhartha S. Srinivasa.
Legibility and predictability of robotmotion. International
Conference on Human-Robot Interaction (HRI), pages 301–308,
2013.
Benjamin Eysenbach, Abhishek Gupta, Julian Ibarz, and Sergey
Levine. Diversity is All YouNeed: Learning Skills without a Reward
Function. In International Conference on LearningRepresentations
(ICLR), 2019.
Jakob Foerster, Richard Y. Chen, Maruan Al-Shedivat, Shimon
Whiteson, Pieter Abbeel, and IgorMordatch. Learning with
opponent-learning awareness. In Proceedings of the 17th
InternationalConference on Autonomous Agents and MultiAgent Systems
(AAMAS), pages 122–130, 2018.
Dylan Hadfield-Menell, Stuart J Russell, Pieter Abbeel, and Anca
Dragan. Cooperative inversereinforcement learning. In Advances in
Neural Information Processing Systems (NIPS) 29, pages3909–3917,
2016.
Mark K Ho, Michael Littman, James MacGlashan, Fiery Cushman, and
Joseph L Austerweil. Showingversus doing: Teaching by
demonstration. In Advances In Neural Information Processing
Systems(NIPS) 29, pages 3027–3035, 2016.
Edward Hughes, Joel Z Leibo, Matthew Phillips, Karl Tuyls, Edgar
Dueñez Guzman, Antonio GarcíaCastañeda, Iain Dunning, Tina Zhu,
Kevin McKee, Raphael Koster, Heather Roff, and ThoreGraepel.
Inequity aversion improves cooperation in intertemporal social
dilemmas. In Advances inNeural Information Processing Systems
(NIPS) 31, pages 3330–3340. 2018.
Max Jaderberg, Volodymyr Mnih, Wojciech Marian Czarnecki, Tom
Schaul, Joel Z. Leibo, DavidSilver, and Koray Kavukcuoglu.
Reinforcement Learning with Unsupervised Auxiliary Tasks.
InInternational Conference on Learning Representations (ICLR),
2017.
Natasha Jaques, Angeliki Lazaridou, Edward Hughes, Çaglar
Gülçehre, Pedro A. Ortega, DJ Strouse,Joel Z. Leibo, and Nando de
Freitas. Intrinsic social motivation via causal influence in
multi-agentRL. CoRR, abs/1810.08647, 2018.
Max Kleiman-Weiner, Mark K Ho, Joseph L Austerweil, Michael L
Littman, and Joshua B Tenen-baum. Coordinate to cooperate or
compete: abstract goals and joint intentions in social
interaction.In Proceedings of the 38th Annual Conference of the
Cognitive Science Society, 2016.
Joel Z Leibo, Vinicius Zambaldi, Marc Lanctot, Janusz Marecki,
and Thore Graepel. Multi-agentreinforcement learning in sequential
social dilemmas. In Proceedings of the 16th Conference onAutonomous
Agents and MultiAgent Systems (AAMAS), pages 464–473, 2017.
Michael L Littman. Markov games as a framework for multi-agent
reinforcement learning. InProceedings of the 11th International
Conference on Machine Learning (ICML), pages 157–163,1994.
Michael L Littman. Friend-or-foe q-learning in general-sum
games. In Proceedings of the 28thInternational Conference on
Machine Learning (ICML), pages 322–328, 2001.
Volodymyr Mnih, Adria Puigdomenech Badia, Mehdi Mirza, Alex
Graves, Timothy Lillicrap, TimHarley, David Silver, and Koray
Kavukcuoglu. Asynchronous methods for deep reinforcementlearning.
In Proceedings of The 33rd International Conference on Machine
Learning (ICML),pages 1928–1937, 2016.
Andrew Y Ng, Stuart J Russell, et al. Algorithms for inverse
reinforcement learning. In Proceedingsof the 17th International
Conference on Machine Learning (ICML), pages 663–670, 2000.
10
-
Georg Ostrovski, Marc G. Bellemare, Aäron van den Oord, and Rémi
Munos. Count-based explorationwith neural density models. In
Proceedings of the 34th International Conference on MachineLearning
(ICML), pages 2721–2730, 2017.
Alexander Peysakhovich and Adam Lerer. Prosocial learning agents
solve generalized stag huntsbetter than selfish ones. In
Proceedings of the 17th International Conference on
AutonomousAgents and MultiAgent Systems (AAMAS), pages 2043–2044,
2018.
Neil Rabinowitz, Frank Perbet, Francis Song, Chiyuan Zhang, S.
M. Ali Eslami, and MatthewBotvinick. Machine theory of mind. In
Proceedings of the 35th International Conference onMachine Learning
(ICML), pages 4218–4227, 2018.
Patrick Shafto, Noah D Goodman, and Thomas L Griffiths. A
rational account of pedagogicalreasoning: Teaching by, and learning
from, examples. Cognitive psychology, 71:55–89, 2014.
Richard S Sutton, David A. McAllester, Satinder P. Singh, and
Yishay Mansour. Policy gradient meth-ods for reinforcement learning
with function approximation. In Advances in Neural
InformationProcessing Systems (NIPS) 12, pages 1057–1063. 2000.
Michael Tomasello, Malinda Carpenter, Josep Call, Tanya Behne,
and Henrike Moll. Understandingand sharing intentions: The origins
of cultural cognition. Behavioral and Brain Sciences,
28(05):675–691, 2005.
John N. Tsitsiklis and Kuang Xu. Delay-predictability trade-offs
in reaching a secret goal. OperationsResearch, 66(2):587–596,
2018.
Tomer Ullman, Chris Baker, Owen Macindoe, Owain Evans, Noah
Goodman, and Joshua B. Tenen-baum. Help or hinder: Bayesian models
of social goal inference. In Advances in Neural
InformationProcessing Systems (NIPS) 22, pages 1874–1882. 2009.
Yee Whye Teh, Victor Bapst, Wojciech M. Czarnecki, John Quan,
James Kirkpatrick, Raia Hadsell,Nicolas Heess, and Razvan Pascanu.
Distral: Robust multitask reinforcement learning. In Advancesin
Neural Information Processing Systems (NIPS) 30, pages 4496–4506.
2017.
11