Embed Size (px)
Citation preview

Learning Interaction Laws in Particle- and Agent-based Systems
Mauro Maggioni
Johns Hopkins University
Joint work with Fei Lu, Sui Tang, Ming Zhong, Jason Miller
Felix Munoz, https://www.youtube.com/watch?v=OxYn3e_imhA
10/2/13 10:30 AM
Page 1 of 1http://upload.wikimedia.org/wikipedia/commons/1/1c/Air_Force_Research_Laboratory.svg
AFOSR NSF
BBC Blue Planet

From https://www.youtube.com/watch?v=gJhn7WmXWVY Felix Munoz, https://www.youtube.com/watch?v=OxYn3e_imhA
Problem: “Given trajectories of dynamical system of interacting agents, learnthe interaction rules.”Applications: biological systems, particle systems.Further goals: hypothesis testing for agent-based systems; transfer learning;agents on networks; collaborative and competitive games; learning dictionariesfor complex dynamical systems.
<latexit sha1_base64="lhwqyXKHv0cX3rEC66l0FkwgrrE=">AAADYnicbVLBbhMxEHU2FMoCbUKPcLCIUDlAlIQDqOVQhAQcg0TaSkmUer2zGzdee2V7Q1dRf5IbJy58COPNRg0tPo3fzJt58zRRLoV1vd6vRtC8t3P/we7D8NHjJ3v7rfbTU6sLw2HEtdTmPGIWpFAwcsJJOM8NsCyScBYtPvn82RKMFVp9d2UO04ylSiSCM4fQrN24migtVAzK0aHRSMuO6MXFF7EERZ1hl8CdNgIs1QmNS8 UypEpqS+sg85hQDgzjTqiUshTb2NdUAjPInsNNVitqCgm2e3gYhjcjP+a45FqLPaKRQL3p1gDslTPjBJewQbp0m/+5MDjG0FQziQ3mZa7xb4WlDmylKdFmreuNtynetDn2yymbILdSi6XHtX6KWhW4H9ossAwtlizSBjUugTIVI5LlgFb7f8oywKJNCxqLaldWOeZH+2IJV3ess91Zq9Pr9qpH7wb9OuiQ+g1nrZ+TWPMiQ41cMmvH/V7upqvan+twUljIGV/gFmMMlZc2XVUnck1fFn55ryjR6FuFbjNWLLO2zCKszJib29s5D/4vNy5c8n66EiovHCi+HpQUkjpN/b2hIwZPSJYYMG7QNU75nPmbwKsM0YT+7ZXvBqeDbv9td/Bt0Dn5UNuxS56RF+QV6ZN35IR8JUMyIrzxO9gJ9oL94E8zbLabB+vSoFFzDsg/r/n8L8OIFyw=</latexit>
Renewed interest in learning ODE’s and PDE’s in Applied Math and Engineer-ing e.g. S. Osher, H. Shae↵er, N. Kutz, Y. Kevrekidis, D. Giannakis, C. Shutte, R. Ward...; also in the ML community, e.g. Grzeszczuk, Chang, Battaglia,Tenenbaum, especially in view of applications to control/reinforcement learning.
<latexit sha1_base64="A+Z3rz5OMLT5RJ6bN/JV++LupIk=">AAADLHicbVJbaxNBFN5dbzVemuqjL4cW0YdlTEpBQR9qL7SgtbX2Jk0IJ7NnN0NmZ5eZ2ZQk9Af54l8RxAeL+OrvcCaJoK0HBr5zne98M91SCmMbjYswunb9xs1bc7drd+7euz9fX3hwZIpKczrkhSz0SRcNSaHo0Aor6aTUhHlX0nG3v+7zxwPSRhTqwA5LaueYKZEKjtaFOgvhWksVQiWkLOyTojNKQChLmox1ACShVkJlsL ux+cQAqgT2JsjlXpeOoavfQdubZDZV5miQ9vVALGPwgcGu6ZGOYds5PaQ09c47Bm8qO4rhowM00NQXiTAxbDDYEqgU9r237ltaixVYSzHsMzhGnTDGXgJKU3gGtkew8xZ4keeVEnYYT2+tbekRmREfVX03pYcqi2ENrcVMCozhwO2puljlrtyUxAVKOfTjBoLOoEgB/WJThQzYws1XVhfymSah0sIJn3u5/kjDOvWlBmtMDK6C5gwsBTPb69S/tpKCV34Kl2jMabNR2vYYtRVc0nmtVRkqkfcxo1MHFeZk2uPJY5/DYxdJwNFwx7GYRP/uGGNuzDDvusrcPYy5nPPB/+VOK5u+aI+FKitLik8vSivpBfA/BxKhiVunVCKQa+G4Au+hRu5+i6k5EZqXV74KjpZZc4WtvF9eWn01k2MueBQsBk+DZvA8WA22g73gMODhp/BL+D28iD5H36If0c9paRTOeh4G/1j06zfJYPyv</latexit>
Learning Interaction Laws

Estimation/Learning for ODE systems
No randomness: this is an approximation problem.
Randomness: this is a statistical problem. Sources of randomness:· initial conditions x(0) are random, e.g ⇠i.i.d µ0, a prob. meas. on RD;· the observations are corrupted by noise.
<latexit sha1_base64="OsZ14OvJR1w58Q2C1lwlKFD+1FQ=">AAADOnicbVJNj9MwEHXC11K+unDkMqJBWqRVlFaLQMBhJThwQmWhuys1pXKcSWs1tiPbqVpF+V1c+BXcOHDhAEJc+QE4bQVld0eJ9Dzjec9v7KTIubFR9MXzL12+cvXazvXWjZu3bt9p7949NqrUDAdM5UqfJtRgziUOLLc5nhYaqUhyPElmL5v6yRy14Uq+t8sCR4JOJM84o9alxrteP5aKyxSlhTcKNJWpEhKNeQZ2yg24j0 qgRaHVgotVEzjs6EUIrVY8NzNeRGHvMRNu9Zfq6CIeMNYRGOvE838k71ZWDKhsW32LLIhZqmwAXHLLXSdTMuXNQQwEVZxksKj3okcBUI0bhn3AcAJBbLgYV7HFha14yMO0rmNRjqNg352l0Q9BIDUhOE9B7MxNk6Q6qj+8Cp5fIG+nCCoxqOd0Ld7oMaV1WVhMIVmC6zAYjtudKIxWAedBdwM6ZBP9cftznCpWCqfFcmrMsBsVdlRR7QaVY92KS4MFZTM6waGDkgo0o2p19TU8dJkUMqXd7+a+ym53VFQYsxSJ29kYNGdrTfKi2rC02dNRxWVRWpRsLZSVOVgFzTuClGtkNl86QJl298GATammzLrX1nJD6J61fB4c98LuQXjwttc5fLEZxw65Tx6QPdIlT8gheU36ZECY99H76n33fvif/G/+T//XeqvvbXrukf/C//0HjUEG5g==</latexit>
Suppose we have a system driven by of ODEs in the form
x(t) = f(x(t)) ,x 2 RD, f : RD ! RD
and we are given observations of positions and velocities
(x(m)(tl), x
(m)(tl))l=1,...,L;m=1,...,M ,
where 0 = t1 < · · · < tL = T , and m indexes trajectories corresponding to
di↵erent initial conditions at, say, t = 0.
Objective: construct an estimator f that is close to f .
<latexit sha1_base64="as5/eVxIkPCR8CszOUK6aoHN1pI=">AAAD/XicbVNLb9NAEHYdHiW8WnrkMqJGSiQrSqpKoNJIlSgSh6IW6EuqU2u9XidL7V13d502WBF/hQsHEOLK/+DGv2HWTUNoWcnSzHwzO998443ylGvTbv+ec2s3bt66PX+nfvfe/QcPFxYf7WtZKMr2qEylOoyIZikXbM9wk7LDXDGSRSk7iE5eWvxgyJTmUuyaUc56GekLnnBKDIbCRXcpEJKLmAkD74s8l5rBGYMBGTIgoE fasAxixYdMQDQCmcD25isNXIAZMEikyuqeB0EsDZRBlJTn43HDNKFbeZCMGzPRZnB6WpDYn2YGXAQZMYMoKt+Njzf9y6K12WigeH9giFLybDYMnlcnIrZkiWLQrxjKSDM1rEbTliuOwy8cmzpkqaToM43FU2LHZSNrIr0wbfp2jvISmEWaYZl2OxWu/a0XkE2dN+PA91GCswFDGl67a8LOegWtm3Cru+v5VW8v88DKfI7NjSIfGDVSWSZUKsV0LkXMRR+MhJgnCV6F++ACyZIUUxCcjGF80GTkg2e6ba9Vr//d3nZkL0UZ1myBNqqgBlsD04ajblKBFwyImUjs4f4ItkACqd05NvYuoVa4sNxutasD143OxFh2JmcnXPiFE9MiQx40JVofddq56ZVEGU5TNq4HhWY5oSekz47QFCRjuldWf+8YnmIktr8SfjhHFZ2tKEmm9SiLMNPuX1/FbPB/2FFhkue9kou8MEzQi0ZJkdpZ7VNApRUqlo7QIFShwhTogChCDT6YOorQuTrydWN/pdVZba2+XVneWJ/IMe88dp44DafjPHM2nNfOjrPnUPej+9n96n6rfap9qX2v/bhIdecmNUvOP6f28w91bEmf</latexit>

Given (x(m)(tl), x(m)(tl))l=1,...,L;m=1,...,M , with x(m)(0) ⇠i.i.d. µ0, we want toapproximate the unknown f in x(t) = f(x(t)).View this as a regression problem: in regression one is given pairs {(zi, f(zi) +⌘i)}ni=1, with zi ⇠i.i.d. ⇢, ⇢ a probability measure on RD, and outputs an esti-mator fn such that fn ! f as n ! +1.
<latexit sha1_base64="SoWVPqMiGPsB/HwyMuCMwpprX4k=">AAAEIHicdVNba9RAFE53vdT11uqjLwcbYUOXkFRQUQsFBX1QqGK3hWYbJtnJZmgyE2Ym3a5Dfoov/hVffFBE3/TXeJKm7bbVITAn5/vO7ZuZqMiY0p73e6HTvXT5ytXFa73rN27eur20fGeoRCljuhWLTMidiCiaMU63NNMZ3SkkJXmU0e1o/0WNbx9QqZjgH/SsoKOcTDhLWEw0usLlzqOAC8bHlGt4xQ4oB7tvgigxh1W1Z/ q5U/V1mDmDYCy0OQbmESc02brf4Grw5hnkJz9vK3sAU6ZTsOtAODwO85xAsTw0QU50KnPDXOaO3aoK8jL06hgKU4L9aAGkKKQ4ZEikoFMKJd/nYsrbjEllA+M9u64Hx831tQPr0OL9Oa9ju73e6bRDRqeYkykg+IGkE0lVrRNgSZQvf4q5592CU0D2pFGpIEwqsAPTVICPVcgGyantrAZUE9yDKjRs3a/2+FkxahL8RwaZCiTbzY6d1e2QiGVMzyCnRJWSYi+I13FRZN5Xey+RT/gYRKmLUuM4HKjStWxCIjElutUj5DaoMk5xcKLPIYFkk1QTKcX0RF2Uxp4HVgPGEz2z3XBpxXO9ZsFFw2+NFatdm+HSLzyluMxR+jgjSu36XqFHhkjN4oxWvaBUtCDxPpnQXTQ5yakameaCV/AAPWNIcJhE4NE13vkIQ3KlZnmEzFoUdR6rnf/CdkudPBkZxlE1yuOjQkmZ1Vevfi0wZpLGOpuhQWLJsFeIUyJJrPFN9VAE//zIF43hmus/dNfera1sPG/lWLTuWfetvuVbj60N67W1aW1ZcedT50vnW+d793P3a/dH9+cRtbPQxty1zqzun7+c4leI</latexit>
Curse of dimensionality: D in the denominator of the rate makes the rate tooslow to be useful in applications.
<latexit sha1_base64="y7ihiZQhfamwpdY/60warL2ifQM=">AAACZHicbVFNb9NAEF2bj5ZQwKXihIRWpEicIjsciqoeKpUDxyKRtlISRePNuFllP6zdcVFk9U9y48iF38E4iQS0zOn5zZudec9lbXSkPP+RpA8ePnq8s/uk93Tv2fMX2f7Li+iboHCkvPHhqoSIRjsckSaDV3VAsKXBy3J51vUvbzBE7d1XWtU4tXDtdKUVEFOzrJ04r90cHcmzJkSUvpJzbdF1E2A0rY7l4adDqZ2kBUoWeq sdkA+dsqMCEEoLS4x/Psl7GY3/xkCWKJuIVWO6N6BmU5vdcTDL+vkgX5e8D4ot6Ittnc+y75O5Vw1fR8pAjOMir2naQiCtDN72JryoBrWEaxwzdGAxTtt1SLfyHTNzWfHhlWe3a/bviRZsjCtbstICLeLdXkf+rzduqPo4bbWrG0KnNos6u+y9S5zjDKjIrBiACppvlWoBARTxf+lxCMVdy/fBxXBQfBgMvwz7pyfbOHbFa/FWvBeFOBKn4rM4FyOhxM9kJ8mS/eRXupcepK820jTZzhyIfyp98xvT7LcW</latexit>
Nonparametric regression
Well-understood problem; there exist nonparametric estimators that, only as-
suming f is (say) s-Holder and that ⇢ has compact support, satisfy
E[||fn � f ||L2(⇢)] Cn� s2s+D .
They may be constructed as piecewise polynomials.
Without further assumption, no other estimator exists that achieves a better
rate, in the min-max sense.
<latexit sha1_base64="dK9tng8456Vdsou5Fl6Y5dBHNYs=">AAADinicbVJNb9NAEHUToCUUaOHIZdQaqRVNlESIUpVDpRapBw5F6pcUp9F6Pa5XtXetnXWp5fi/8Ju48W8YJxEqLXN6ms83bybMU0Wu3/+91Go/efpseeV558Xqy1ev19bfnJMprMQzaVJjL0NBmCqNZ065FC9ziyILU7wIbw6b+MUtWlJGn7oyx3EmrrWKlRSOXZP1pZ+BNkpHqB1cYJp2C8aWnDER5NZwm2wfXIIWAe+YDm ijc2FFhs4qCUhOZcIZS5wk3A4YnZYgiIpM6WvwqyCMIa59UARbJMpt8MnvHgcbJuUxIHQ0qwM/sInxIREE0mS5kA6oyHNjuSUxVYrLju8HPCoJw+prPZpOA65btJ/o7gJNp5Pq29Vwq2m3XY+DFOEQ9FXVDWIrZEV1NaQPR3Ud7PR8v3OaYAmZKCFEHqvJ2UI6jJg/5Aol/lCEkJu01CZTIqVep3NPLeUSUziIC9voM186b1TdYZHAzJx/9ZmrN1cJhEwU3iKB4MnOcZ4VDndA6UZqYOm6mbgDQk3Ym6xt9nv9mcFjMFiATW9hJ5O1X0FkZJExSZkyq9Ggn7txJaxTMsW6ExSErPCNuMYRQ823pHE1e6Ua3rMngpgJx4aXnHnvV1QiIyqzkDObY9DDWOP8X2xUuPjzuFI6LxxqOR8UFyk4A81fQqQsSsfPEykhrWKuIBN+ND6IpQ6LMHi48mNwPuwNPvb2vg83D74s5Fjx3nkb3pY38Ha9A+/YO/HOPNlabnVbn1q77dX2sL3X3p+ntpYWNW+9f6x99AdvDyEt</latexit>

Given (x(m)(tl), x(m)(tl))l=1,...,L;m=1,...,M , with x(m)(0) ⇠i.i.d. µ0, we want toapproximate the unknown f in x(t) = f(x(t)).View this as a regression problem: in regression one is given pairs {(zi, f(zi) +⌘i)}ni=1, with zi ⇠i.i.d. ⇢, ⇢ a probability measure on RD, and outputs an esti-mator fn such that fn ! f as n ! +1.
<latexit sha1_base64="SoWVPqMiGPsB/HwyMuCMwpprX4k=">AAAEIHicdVNba9RAFE53vdT11uqjLwcbYUOXkFRQUQsFBX1QqGK3hWYbJtnJZmgyE2Ym3a5Dfoov/hVffFBE3/TXeJKm7bbVITAn5/vO7ZuZqMiY0p73e6HTvXT5ytXFa73rN27eur20fGeoRCljuhWLTMidiCiaMU63NNMZ3SkkJXmU0e1o/0WNbx9QqZjgH/SsoKOcTDhLWEw0usLlzqOAC8bHlGt4xQ4oB7tvgigxh1W1Z/ q5U/V1mDmDYCy0OQbmESc02brf4Grw5hnkJz9vK3sAU6ZTsOtAODwO85xAsTw0QU50KnPDXOaO3aoK8jL06hgKU4L9aAGkKKQ4ZEikoFMKJd/nYsrbjEllA+M9u64Hx831tQPr0OL9Oa9ju73e6bRDRqeYkykg+IGkE0lVrRNgSZQvf4q5592CU0D2pFGpIEwqsAPTVICPVcgGyantrAZUE9yDKjRs3a/2+FkxahL8RwaZCiTbzY6d1e2QiGVMzyCnRJWSYi+I13FRZN5Xey+RT/gYRKmLUuM4HKjStWxCIjElutUj5DaoMk5xcKLPIYFkk1QTKcX0RF2Uxp4HVgPGEz2z3XBpxXO9ZsFFw2+NFatdm+HSLzyluMxR+jgjSu36XqFHhkjN4oxWvaBUtCDxPpnQXTQ5yakameaCV/AAPWNIcJhE4NE13vkIQ3KlZnmEzFoUdR6rnf/CdkudPBkZxlE1yuOjQkmZ1Vevfi0wZpLGOpuhQWLJsFeIUyJJrPFN9VAE//zIF43hmus/dNfera1sPG/lWLTuWfetvuVbj60N67W1aW1ZcedT50vnW+d793P3a/dH9+cRtbPQxty1zqzun7+c4leI</latexit>
Nonparametric regressionSuppose we have a system driven by of ODEs in the form
x(t) = f(x(t)) ,x 2 RD, f : RD ! RD
and we are given observations of positions and velocities
(x(m)(tl), x
(m)(tl))l=1,...,L;m=1,...,M ,
where 0 = t1 < · · · < tL = T , and m indexes trajectories corresponding to
di↵erent initial conditions at, say, t = 0.
Objective: construct an estimator f that is close to f .
<latexit sha1_base64="as5/eVxIkPCR8CszOUK6aoHN1pI=">AAAD/XicbVNLb9NAEHYdHiW8WnrkMqJGSiQrSqpKoNJIlSgSh6IW6EuqU2u9XidL7V13d502WBF/hQsHEOLK/+DGv2HWTUNoWcnSzHwzO998443ylGvTbv+ec2s3bt66PX+nfvfe/QcPFxYf7WtZKMr2qEylOoyIZikXbM9wk7LDXDGSRSk7iE5eWvxgyJTmUuyaUc56GekLnnBKDIbCRXcpEJKLmAkD74s8l5rBGYMBGTIgoEfasAxixYdMQDQCmcD25isNXIAZMEikyuqeB0EsDZRBlJTn43HDNKFbeZCMGzPRZnB6WpDYn2YGXAQZMYMoKt+Njzf9y6K12WigeH9giFLybDYMnlcnIrZkiWLQrxjKSDM1rEbTliuOwy8cmzpkqaToM43FU2LHZSNrIr0wbfp2jvISmEWaYZl2OxWu/a0XkE2dN+PA91GCswFDGl67a8LOegWtm3Cru+v5VW8v88DKfI7NjSIfGDVSWSZUKsV0LkXMRR+MhJgnCV6F++ACyZIUUxCcjGF80GTkg2e6ba9Vr//d3nZkL0UZ1myBNqqgBlsD04ajblKBFwyImUjs4f4ItkACqd05NvYuoVa4sNxutasD143OxFh2JmcnXPiFE9MiQx40JVofddq56ZVEGU5TNq4HhWY5oSekz47QFCRjuldWf+8YnmIktr8SfjhHFZ2tKEmm9SiLMNPuX1/FbPB/2FFhkue9kou8MEzQi0ZJkdpZ7VNApRUqlo7QIFShwhTogChCDT6YOorQuTrydWN/pdVZba2+XVneWJ/IMe88dp44DafjPHM2nNfOjrPnUPej+9n96n6rfap9qX2v/bhIdecmNUvOP6f28w91bEmf</latexit>

Nonparametric regressionSuppose we have a system driven by of ODEs in the form
x(t) = f(x(t)) ,x 2 RD, f : RD ! RD
and we are given observations of positions and velocities
(x(m)(tl), x
(m)(tl))l=1,...,L;m=1,...,M ,
where 0 = t1 < · · · < tL = T , and m indexes trajectories corresponding to
di↵erent initial conditions at, say, t = 0.
Objective: construct an estimator f that is close to f .
<latexit sha1_base64="as5/eVxIkPCR8CszOUK6aoHN1pI=">AAAD/XicbVNLb9NAEHYdHiW8WnrkMqJGSiQrSqpKoNJIlSgSh6IW6EuqU2u9XidL7V13d502WBF/hQsHEOLK/+DGv2HWTUNoWcnSzHwzO998443ylGvTbv+ec2s3bt66PX+nfvfe/QcPFxYf7WtZKMr2qEylOoyIZikXbM9wk7LDXDGSRSk7iE5eWvxgyJTmUuyaUc56GekLnnBKDIbCRXcpEJKLmAkD74s8l5rBGYMBGTIgoEfasAxixYdMQDQCmcD25isNXIAZMEikyuqeB0EsDZRBlJTn43HDNKFbeZCMGzPRZnB6WpDYn2YGXAQZMYMoKt+Njzf9y6K12WigeH9giFLybDYMnlcnIrZkiWLQrxjKSDM1rEbTliuOwy8cmzpkqaToM43FU2LHZSNrIr0wbfp2jvISmEWaYZl2OxWu/a0XkE2dN+PA91GCswFDGl67a8LOegWtm3Cru+v5VW8v88DKfI7NjSIfGDVSWSZUKsV0LkXMRR+MhJgnCV6F++ACyZIUUxCcjGF80GTkg2e6ba9Vr//d3nZkL0UZ1myBNqqgBlsD04ajblKBFwyImUjs4f4ItkACqd05NvYuoVa4sNxutasD143OxFh2JmcnXPiFE9MiQx40JVofddq56ZVEGU5TNq4HhWY5oSekz47QFCRjuldWf+8YnmIktr8SfjhHFZ2tKEmm9SiLMNPuX1/FbPB/2FFhkue9kou8MEzQi0ZJkdpZ7VNApRUqlo7QIFShwhTogChCDT6YOorQuTrydWN/pdVZba2+XVneWJ/IMe88dp44DafjPHM2nNfOjrPnUPej+9n96n6rfap9qX2v/bhIdecmNUvOP6f28w91bEmf</latexit>
Map our problem to regression? zi = x(m)(tl) and f(zi) = x(m)
(tl) (so i runsover the index sets for l and m).
Unfortunately: no independence over l (observations over the same deterministic
trajectory). There is independence, for each fixed l, over m.
Even if we pretended to have independence, without further assumptions on f ,besides s-Holder regularity, the best attainable rate is n� s
2s+D , where n = LM .
<latexit sha1_base64="Lbs69WneNr6KNlKfzJO6JksdQKc=">AAAD8XicbZJbT9RAFMdLVwXXC6CPvpxATXYjNLvERGIkkqgJD5JgwgIJu2ym01M60s40M9OFpem38MUHjfHVb+Ob38bTUiO3eTo51//5nQmyRBjb6/2ZcVt37t6bnbvffvDw0eP5hcUne0blmuOAq0Tpg4AZTITEgRU2wYNMI0uDBPeDk3dVfH+C2ggld+00w1HKjqWIBGeWXONFd3YolZAhSgvbLAPqC5lWVJ6CVaDxWKOpqt +CVwyDCM7LsdiorbPyqOik3bJjx0nXAybDJiXqnI9Ft9wYhsreltkxCjzhgc6lAUXqwMYIlYgzMGgNREqDlzQtU6/rt9v/VQ4khW0umcVk+hqkqiszrKIcL/pVxR0VGNSTes9LYwxLEUK0qFMhia/gYDX7jNwqPe36sBujJjHmSteVWhIyHgNE4gzDasJKMyv1fLgs8MMEJYgITpFI0iDyhhXLmE3wWtdTYWOVW4hyTdo0MGPyNGsUy384SxoVoBEhGvCMt7o1XFJJSOl0nTxhWtjpSr0bJVlg1jIhGV0QNDGqVvHkUbE6jDTjhSmLNfPifVn1PK1X9eTGx23PHy8s9/xe/eCm0W+MZad5O+OF33Rfnqe0Mk9I+GG/l9lRwTQhTbBsD3ODGeMn7BgPyZTE3YyK+seW8Jw8YQ01UoSs9l6uKFhqzDQNKDNlNjbXY5XztthhbqP1USFklhN4fjEoypOKf/X9IRSaTp1MyWCcyNH5ecyIDH0I0yYI/esr3zT21vz+S3/909ry5psGx5zzzFlyOk7feeVsOlvOjjNwuCvdL+4393vLtL62frR+XqS6M03NU+fKa/36C3HIQeY=</latexit>

Nonparametric regressionSuppose we have a system driven by of ODEs in the form
x(t) = f(x(t)) ,x 2 RD, f : RD ! RD
and we are given observations of positions and velocities
(x(m)(tl), x
(m)(tl))l=1,...,L;m=1,...,M ,
where 0 = t1 < · · · < tL = T , and m indexes trajectories corresponding to
di↵erent initial conditions at, say, t = 0.
Objective: construct an estimator f that is close to f .
<latexit sha1_base64="as5/eVxIkPCR8CszOUK6aoHN1pI=">AAAD/XicbVNLb9NAEHYdHiW8WnrkMqJGSiQrSqpKoNJIlSgSh6IW6EuqU2u9XidL7V13d502WBF/hQsHEOLK/+DGv2HWTUNoWcnSzHwzO998443ylGvTbv+ec2s3bt66PX+nfvfe/QcPFxYf7WtZKMr2qEylOoyIZikXbM9wk7LDXDGSRSk7iE5eWvxgyJTmUuyaUc56GekLnnBKDIbCRXcpEJKLmAkD74s8l5rBGYMBGTIgoEfasAxixYdMQDQCmcD25isNXIAZMEikyuqeB0EsDZRBlJTn43HDNKFbeZCMGzPRZnB6WpDYn2YGXAQZMYMoKt+Njzf9y6K12WigeH9giFLybDYMnlcnIrZkiWLQrxjKSDM1rEbTliuOwy8cmzpkqaToM43FU2LHZSNrIr0wbfp2jvISmEWaYZl2OxWu/a0XkE2dN+PA91GCswFDGl67a8LOegWtm3Cru+v5VW8v88DKfI7NjSIfGDVSWSZUKsV0LkXMRR+MhJgnCV6F++ACyZIUUxCcjGF80GTkg2e6ba9Vr//d3nZkL0UZ1myBNqqgBlsD04ajblKBFwyImUjs4f4ItkACqd05NvYuoVa4sNxutasD143OxFh2JmcnXPiFE9MiQx40JVofddq56ZVEGU5TNq4HhWY5oSekz47QFCRjuldWf+8YnmIktr8SfjhHFZ2tKEmm9SiLMNPuX1/FbPB/2FFhkue9kou8MEzQi0ZJkdpZ7VNApRUqlo7QIFShwhTogChCDT6YOorQuTrydWN/pdVZba2+XVneWJ/IMe88dp44DafjPHM2nNfOjrPnUPej+9n96n6rfap9qX2v/bhIdecmNUvOP6f28w91bEmf</latexit>
Map our problem to regression? zi = x(m)(tl) and f(zi) = x(m)
(tl) (so i runsover the index sets for l and m).
Unfortunately: no independence over l (observations over the same deterministic
trajectory). There is independence, for each fixed l, over m.
Even if we pretended to have independence, without further assumptions on f ,besides s-Holder regularity, the best attainable rate is n� s
2s+D , where n = LM .
<latexit sha1_base64="Lbs69WneNr6KNlKfzJO6JksdQKc=">AAAD8XicbZJbT9RAFMdLVwXXC6CPvpxATXYjNLvERGIkkqgJD5JgwgIJu2ym01M60s40M9OFpem38MUHjfHVb+Ob38bTUiO3eTo51//5nQmyRBjb6/2ZcVt37t6bnbvffvDw0eP5hcUne0blmuOAq0Tpg4AZTITEgRU2wYNMI0uDBPeDk3dVfH+C2ggld+00w1HKjqWIBGeWXONFd3YolZAhSgvbLAPqC5lWVJ6CVaDxWKOpqt +CVwyDCM7LsdiorbPyqOik3bJjx0nXAybDJiXqnI9Ft9wYhsreltkxCjzhgc6lAUXqwMYIlYgzMGgNREqDlzQtU6/rt9v/VQ4khW0umcVk+hqkqiszrKIcL/pVxR0VGNSTes9LYwxLEUK0qFMhia/gYDX7jNwqPe36sBujJjHmSteVWhIyHgNE4gzDasJKMyv1fLgs8MMEJYgITpFI0iDyhhXLmE3wWtdTYWOVW4hyTdo0MGPyNGsUy384SxoVoBEhGvCMt7o1XFJJSOl0nTxhWtjpSr0bJVlg1jIhGV0QNDGqVvHkUbE6jDTjhSmLNfPifVn1PK1X9eTGx23PHy8s9/xe/eCm0W+MZad5O+OF33Rfnqe0Mk9I+GG/l9lRwTQhTbBsD3ODGeMn7BgPyZTE3YyK+seW8Jw8YQ01UoSs9l6uKFhqzDQNKDNlNjbXY5XztthhbqP1USFklhN4fjEoypOKf/X9IRSaTp1MyWCcyNH5ecyIDH0I0yYI/esr3zT21vz+S3/909ry5psGx5zzzFlyOk7feeVsOlvOjjNwuCvdL+4393vLtL62frR+XqS6M03NU+fKa/36C3HIQeY=</latexit>
For a system of N agents in Rd, D = Nd is typically very large, making theabove unfeasible. Further assumptions are needed.
<latexit sha1_base64="tofjQsqRFOKFFIpvSg18ZNmuoAU=">AAACfXicbVFNb9NAEF2brxK+Ahy5jIgrAYosu6pUDq1UCVRxqgoibaUkROv1OFllP6zddSUryr/gl3Hjr3CBcZoDtMzp6b3ZmTdvi1pJH7LsZxTfuXvv/oOdh71Hj588fdZ//uLc28YJHAmrrLssuEclDY6CDAova4dcFwoviuWHTr+4QuelNV9DW+NU87mRlRQ8EDXrf58YK02JJsCJdcDBtz6gBltBcpoAn5PiQRpIJpqHRV Gsvqy/lckQko9Hp2UC0gONpXFKtUCLWlDczXEImi+lmUNYIPDCXiE0pkLuJRlL4aRxJNA67xtdd048cIdgEEss01l/kKXZpuA2yLdgwLZ1Nuv/mJRWNJrMCkVDx3lWh+mKuyCFwnVv0nisuVjSOWOChmv009UmvTXsElNCRddXlmLYsH+/WHHtfasL6uwi8De1jvyfNm5C9X66kqZuAhpxvahqFATbZYZQSociUG6l5MJJ8gpiwR0XgT6sRyHkN0++Dc730nw/3f+8Nzg+3Maxw16x1+wNy9kBO2af2BkbMcF+RRC9jd5Fv+PdeBin161xtH3zkv1T8cEfTMq/wA==</latexit>

Interesting extensions to:- higher-order systems,- stochastic systems,- agents of di↵erent types,- varying environment....
<latexit sha1_base64="pl+zldfcVRMaNPOASocZacLMFcc=">AAACqXicdVFNb9NAEF2bQov5CnDksmqE4NBadi+0FYdKvcABqaCmiUiiaL0eJ6uud62ddYQV9cfxF3rj3zB2I9GmdKTVPr1587Fvs0or9EnyJwgfbT1+sr3zNHr2/MXLV73Xby7Q1k7CQFpt3SgTCFoZGHjlNYwqB6LMNAyzy9M2P1yCQ2XNuW8qmJZiblShpPBEzXq/J8Yqk4Px/Kvx4AC9MnMOvzyYtgi5t8dR9E+1zxdqvg C3b10OjmODHkrcuytBb+VCUCv5gEDM6UZuC56roqCxxLbrbeqWwjXdPmapnDUlsfFtRRzHs14/iZMu+H2QrkGfreNs1rue5FbWbS+pBeI4TSo/XQlH62q4iiY1QiXkJe04JmhECThddVZf8ffE5Lywjg7N79jbFStRIjZlRspS+AVu5lryf7lx7YvD6UqZqibn5c2gotZkf2cM+eRAet0QENKp1lqy2AlJn4YRmZBuPvk+GBzER3H6/aB/8nntxg57x3bZR5ayT+yEfWFnbMBk8CH4FlwEw3Av/BGOwp830jBY17xldyKUfwHuSdAW</latexit><latexit sha1_base64="pl+zldfcVRMaNPOASocZacLMFcc=">AAACqXicdVFNb9NAEF2bQov5CnDksmqE4NBadi+0FYdKvcABqaCmiUiiaL0eJ6uud62ddYQV9cfxF3rj3zB2I9GmdKTVPr1587Fvs0or9EnyJwgfbT1+sr3zNHr2/MXLV73Xby7Q1k7CQFpt3SgTCFoZGHjlNYwqB6LMNAyzy9M2P1yCQ2XNuW8qmJZiblShpPBEzXq/J8Yqk4Px/Kvx4AC9MnMOvzyYtgi5t8dR9E+1zxdqvg C3b10OjmODHkrcuytBb+VCUCv5gEDM6UZuC56roqCxxLbrbeqWwjXdPmapnDUlsfFtRRzHs14/iZMu+H2QrkGfreNs1rue5FbWbS+pBeI4TSo/XQlH62q4iiY1QiXkJe04JmhECThddVZf8ffE5Lywjg7N79jbFStRIjZlRspS+AVu5lryf7lx7YvD6UqZqibn5c2gotZkf2cM+eRAet0QENKp1lqy2AlJn4YRmZBuPvk+GBzER3H6/aB/8nntxg57x3bZR5ayT+yEfWFnbMBk8CH4FlwEw3Av/BGOwp830jBY17xldyKUfwHuSdAW</latexit><latexit sha1_base64="pl+zldfcVRMaNPOASocZacLMFcc=">AAACqXicdVFNb9NAEF2bQov5CnDksmqE4NBadi+0FYdKvcABqaCmiUiiaL0eJ6uud62ddYQV9cfxF3rj3zB2I9GmdKTVPr1587Fvs0or9EnyJwgfbT1+sr3zNHr2/MXLV73Xby7Q1k7CQFpt3SgTCFoZGHjlNYwqB6LMNAyzy9M2P1yCQ2XNuW8qmJZiblShpPBEzXq/J8Yqk4Px/Kvx4AC9MnMOvzyYtgi5t8dR9E+1zxdqvg C3b10OjmODHkrcuytBb+VCUCv5gEDM6UZuC56roqCxxLbrbeqWwjXdPmapnDUlsfFtRRzHs14/iZMu+H2QrkGfreNs1rue5FbWbS+pBeI4TSo/XQlH62q4iiY1QiXkJe04JmhECThddVZf8ffE5Lywjg7N79jbFStRIjZlRspS+AVu5lryf7lx7YvD6UqZqibn5c2gotZkf2cM+eRAet0QENKp1lqy2AlJn4YRmZBuPvk+GBzER3H6/aB/8nntxg57x3bZR5ayT+yEfWFnbMBk8CH4FlwEw3Av/BGOwp830jBY17xldyKUfwHuSdAW</latexit><latexit sha1_base64="pl+zldfcVRMaNPOASocZacLMFcc=">AAACqXicdVFNb9NAEF2bQov5CnDksmqE4NBadi+0FYdKvcABqaCmiUiiaL0eJ6uud62ddYQV9cfxF3rj3zB2I9GmdKTVPr1587Fvs0or9EnyJwgfbT1+sr3zNHr2/MXLV73Xby7Q1k7CQFpt3SgTCFoZGHjlNYwqB6LMNAyzy9M2P1yCQ2XNuW8qmJZiblShpPBEzXq/J8Yqk4Px/Kvx4AC9MnMOvzyYtgi5t8dR9E+1zxdqvg C3b10OjmODHkrcuytBb+VCUCv5gEDM6UZuC56roqCxxLbrbeqWwjXdPmapnDUlsfFtRRzHs14/iZMu+H2QrkGfreNs1rue5FbWbS+pBeI4TSo/XQlH62q4iiY1QiXkJe04JmhECThddVZf8ffE5Lywjg7N79jbFStRIjZlRspS+AVu5lryf7lx7YvD6UqZqibn5c2gotZkf2cM+eRAet0QENKp1lqy2AlJn4YRmZBuPvk+GBzER3H6/aB/8nntxg57x3bZR5ayT+yEfWFnbMBk8CH4FlwEw3Av/BGOwp830jBY17xldyKUfwHuSdAW</latexit> Second-order prey-predator model.Left: true trajectories; Right: trajec-tories with learned interactions.
<latexit sha1_base64="JkDiJj6eCZ/GraJ5tbJ/RRSShL0=">AAACdXicbVFNbxMxEPUuHy3LV4ALEkIyDSAuWXaDBAgulbhw4FA+0lbKRtGsPZu49dor2wuKov4Dfh03/gaXXjubRKK0zGH09ObNeOa5bLTyIct+R/GVq9eub23fSG7eun3nbu/e/X1vWydwJKy27rAEj1oZHAUVNB42DqEuNR6Uxx+6+sF3dF5Z8y0sGpzUMDOqUgICUdPez8JYZSSawL+isEYOrJPoOA1ZDChJCNbx2krUaZL8FX/CKrzjwbVICY5QkEyhf8+/qNl8VenIQVGc61lL+A8V5lwjOIOSKxPQgeiW8em018/SbBX8Msg3oM82sTft/SqkFW1N04UG78d51oTJElxQQuNJUrQeGxDHMMMxQQM1+sly5doJf0aM5BWdV1nabsWe71hC7f2iLklZQ5j7i7WO/F9t3Ibq7WSpTNMGNGL9UNVqup93X8ClcuSXXhAA4RTtysUcOhfooxIyIb948mWwP0zzV+nw87C/+3pjxzZ7xHbYC5azN2yXfWR7bMQE+xM9jJ5EO9Fp/Dh+Gj9fS+No0/OA/RPxyzO3L770</latexit>
Agent-based systemsParticle- and agent-based systems are driven by ODEs with special structure.
A widely used model:
x(m)i =
1
N
NX
i0=1
�(||x(m)i � x(m)
i0 ||)(x(m)i0 � x(m)
i )
Given observations {(xi, xi)}Ni=1 at di↵erent times {tl}Ll=1 and/or for di↵erent
initial conditions {x(m)(0)}Mm=1, we want to learn the interaction kernel �.
Di↵erent limits: N ! +1 (mean-field limit, joint work with M. Fornasier and
M. Bongini), M ! +1 (joint current work with F. Lu, M. Zhong and S. Tang).
<latexit sha1_base64="RTF4DIdwJ3Y138b8ptsJB3rYeuE=">AAAEsnicbVNLb9NAEHabAMW8WjhyGVEjEpG4SVUJVFGpQCkc2lJE01atU2u9XidL1mtrd500cvz/OHPj37DrhL5XsjSexzcz38wEKaNStVp/5+Yr1Xv3Hyw8tB89fvL02eLS80OZZAKTDk5YIo4DJAmjnHQUVYwcp4KgOGDkKBh8NvajIRGSJvxAjVPSjVGP04hipLTKX5r/7fGE8pBwBftIKIoZaQLiIaCe1jUNdghyLBWJJS BBIBR0SDgEY/i+9UXCiKo+yJRgihhIJTKsMkFc+KgtIWFjyAxAnGh53XYc25Mxkv3cCxOV514QwXlRnOW1uF74dMOLBMLtPU9msZ/TNxvt4mwPPEXOVdlpHrCMFLmX9mlRm0xm4T6dxjdn/zM0HV9MJvXabe0NR1ovysKGckDTltvGsX3Jydey2SSQRAxLyiQ4Xl67SN0oG/n/V/dMhrJsB5CCkEYREQZH0ZiUocpnxokZpx3HML2SCIj0d+lMOVWGTpzwkF4kvVZ1rVXmig3MrtOwRwRGyORJgBEkOKg+0TiKaEINAgyI4IRpnDvZdFz7StNbF5UwGlMl18HZ8wTt9RUSIhm99SiP1NiBWkwQb0aUsHDq2YBfGkPBKBGD6WbsurCdCI4kJaJcK634lPCebrHeAGf3TtgpCM5EWcMl2LYLO1nDQJz0NUaJ99OFA8R7dddfXG65rfLBbaE9E5at2dv3F//o2eEs1jkwQ1Ketlup6uazIyhsT29uivBAH8KpFjnSE+zmJXUFvC7XOipHZ2o12qsROYqlHMeB9oyR6subNqO8y3aaqeh9N6c8zRTheJooypgZrLlfvSWCYKXvKqQIC70dGHAfmSnrK7c1Ce2bLd8WDlfd9pq79mN1efPDjI4F66X1yqpZbeudtWl9s/atjoUrK5VO5aziV9eqJ1VUxVPX+blZzAvr2quyf5jXiho=</latexit>

The Mean-field limit
Considering the measure µN(t) = 1
N
PNi=1 �xi(t), we may let N ! +1 to obtain
(under suitable regularity assumptions on �) the mean field equations
@tµ(t) = �r ·✓✓
��0(|| · ||)|| · || ⇤ µ(t)
◆µ(t)
◆, µ(0) = µ0 .
This is also a gradient flow for the energy J (µ) =RRd⇥d �(||x�y||)dµ(x)dµ(y)
on the space of probability measures with Wasserstein distance.
This was studied in Inferring Interaction Rules from Observations of Evolutive
Systems I: The Variational Approach, M. Bongini, M. Fornasier, M. Hansen,
and MM, M3S, 2017<latexit sha1_base64="a209SLQMQUjieqn9EnzrBfG1JoI=">AAAE23icbVNLj9xEEHZ2BgjDI5tw5FLKGjEDsyN7OSRCRMpDoCzSLkuSfUjbs1bbLs+00u423e2dWF7nwgGEuPLHuPEz+AdUe0aQB63RuLq6uur7vqpOKymsi6K/rm0Nhu+8+97190cffPjRxze2b946sbo2GR5nWmpzlnKLUig8dsJJPKsM8jKVeJo+f+TPTy/RWKHVM9dUOC/5QolCZNyRK7m59TdTWqgclYNHWlmRoxFqAW 6JUCK3tUEIWVlfHI7d5B4rDM/iQ2brMmnFvbi7OGQ5SseTtmVpAS+6RFBcF05hRfd5AxIdhIfMiMXScWP06ksmVOGaEJwGnTouFIxrqm/A1sJxwg0GF7XkRrgGuKVSlYdqQStCcrQU4aRHxxy+cL0ArcG8awmtgkKgzDvAn+qenx2FIau4cYLLxBENT2KXKSrDWZZrxyQWbrz+3+3Ztb7E5+Orq/786mrStf/a3RfrFGs6k9c30ymjqjl4b0RSlXUSseksDEfPlsIC/bi0GjgsDM+F17uQegWFNj0dVGgWjdeau2XGZft9N6YclEgol7S9O03bJ91FmzMnSrSQd50HS1g34u/236Yj1LmHsXG/smm6SeiF9BVtxTMEXUBldMpTIb3gm55bWAm3hFPSn4bHIXUpp2HkKsPZaPTfyPTUVtyCdTWRyoECW4Zlu68KNP0k7SuHpKtvBzypJaUujC7hh5QyX/JNawv49lLL2olLhKcNFSwt7H9N6RFOaBL6MC7hQUVYebbsuikczOChVguhRG9/p43iVqDpd4+5sqimwFUOBwfk+urpFPai+M4IRsn2TjSL+gVvG/HG2Ak26yjZ/pPlOqtLIpxJUuQ8jio3b/1YZRK7EastkpbP+QLPyVScmjNv+9Hs4DPy5H2XC02C9d5Xb7S8tLYpU4r0LbZvnnnn/52d1664O2+FqmqHKlsXKmrp35V/6NQvg5mTDRk8o8ckMsiW3HeCOupFiN+k/LZxsjeLo1n8497O/W82clwPPg1uB+MgDu4E94PHwVFwHGSDs8HLwS+DX4fz4c/D34a/r0O3rm3ufBK8toZ//AMQgJuy</latexit><latexit sha1_base64="a209SLQMQUjieqn9EnzrBfG1JoI=">AAAE23icbVNLj9xEEHZ2BgjDI5tw5FLKGjEDsyN7OSRCRMpDoCzSLkuSfUjbs1bbLs+00u423e2dWF7nwgGEuPLHuPEz+AdUe0aQB63RuLq6uur7vqpOKymsi6K/rm0Nhu+8+97190cffPjRxze2b946sbo2GR5nWmpzlnKLUig8dsJJPKsM8jKVeJo+f+TPTy/RWKHVM9dUOC/5QolCZNyRK7m59TdTWqgclYNHWlmRoxFqAW 6JUCK3tUEIWVlfHI7d5B4rDM/iQ2brMmnFvbi7OGQ5SseTtmVpAS+6RFBcF05hRfd5AxIdhIfMiMXScWP06ksmVOGaEJwGnTouFIxrqm/A1sJxwg0GF7XkRrgGuKVSlYdqQStCcrQU4aRHxxy+cL0ArcG8awmtgkKgzDvAn+qenx2FIau4cYLLxBENT2KXKSrDWZZrxyQWbrz+3+3Ztb7E5+Orq/786mrStf/a3RfrFGs6k9c30ymjqjl4b0RSlXUSseksDEfPlsIC/bi0GjgsDM+F17uQegWFNj0dVGgWjdeau2XGZft9N6YclEgol7S9O03bJ91FmzMnSrSQd50HS1g34u/236Yj1LmHsXG/smm6SeiF9BVtxTMEXUBldMpTIb3gm55bWAm3hFPSn4bHIXUpp2HkKsPZaPTfyPTUVtyCdTWRyoECW4Zlu68KNP0k7SuHpKtvBzypJaUujC7hh5QyX/JNawv49lLL2olLhKcNFSwt7H9N6RFOaBL6MC7hQUVYebbsuikczOChVguhRG9/p43iVqDpd4+5sqimwFUOBwfk+urpFPai+M4IRsn2TjSL+gVvG/HG2Ak26yjZ/pPlOqtLIpxJUuQ8jio3b/1YZRK7EastkpbP+QLPyVScmjNv+9Hs4DPy5H2XC02C9d5Xb7S8tLYpU4r0LbZvnnnn/52d1664O2+FqmqHKlsXKmrp35V/6NQvg5mTDRk8o8ckMsiW3HeCOupFiN+k/LZxsjeLo1n8497O/W82clwPPg1uB+MgDu4E94PHwVFwHGSDs8HLwS+DX4fz4c/D34a/r0O3rm3ufBK8toZ//AMQgJuy</latexit><latexit sha1_base64="a209SLQMQUjieqn9EnzrBfG1JoI=">AAAE23icbVNLj9xEEHZ2BgjDI5tw5FLKGjEDsyN7OSRCRMpDoCzSLkuSfUjbs1bbLs+00u423e2dWF7nwgGEuPLHuPEz+AdUe0aQB63RuLq6uur7vqpOKymsi6K/rm0Nhu+8+97190cffPjRxze2b946sbo2GR5nWmpzlnKLUig8dsJJPKsM8jKVeJo+f+TPTy/RWKHVM9dUOC/5QolCZNyRK7m59TdTWqgclYNHWlmRoxFqAW 6JUCK3tUEIWVlfHI7d5B4rDM/iQ2brMmnFvbi7OGQ5SseTtmVpAS+6RFBcF05hRfd5AxIdhIfMiMXScWP06ksmVOGaEJwGnTouFIxrqm/A1sJxwg0GF7XkRrgGuKVSlYdqQStCcrQU4aRHxxy+cL0ArcG8awmtgkKgzDvAn+qenx2FIau4cYLLxBENT2KXKSrDWZZrxyQWbrz+3+3Ztb7E5+Orq/786mrStf/a3RfrFGs6k9c30ymjqjl4b0RSlXUSseksDEfPlsIC/bi0GjgsDM+F17uQegWFNj0dVGgWjdeau2XGZft9N6YclEgol7S9O03bJ91FmzMnSrSQd50HS1g34u/236Yj1LmHsXG/smm6SeiF9BVtxTMEXUBldMpTIb3gm55bWAm3hFPSn4bHIXUpp2HkKsPZaPTfyPTUVtyCdTWRyoECW4Zlu68KNP0k7SuHpKtvBzypJaUujC7hh5QyX/JNawv49lLL2olLhKcNFSwt7H9N6RFOaBL6MC7hQUVYebbsuikczOChVguhRG9/p43iVqDpd4+5sqimwFUOBwfk+urpFPai+M4IRsn2TjSL+gVvG/HG2Ak26yjZ/pPlOqtLIpxJUuQ8jio3b/1YZRK7EastkpbP+QLPyVScmjNv+9Hs4DPy5H2XC02C9d5Xb7S8tLYpU4r0LbZvnnnn/52d1664O2+FqmqHKlsXKmrp35V/6NQvg5mTDRk8o8ckMsiW3HeCOupFiN+k/LZxsjeLo1n8497O/W82clwPPg1uB+MgDu4E94PHwVFwHGSDs8HLwS+DX4fz4c/D34a/r0O3rm3ufBK8toZ//AMQgJuy</latexit><latexit sha1_base64="a209SLQMQUjieqn9EnzrBfG1JoI=">AAAE23icbVNLj9xEEHZ2BgjDI5tw5FLKGjEDsyN7OSRCRMpDoCzSLkuSfUjbs1bbLs+00u423e2dWF7nwgGEuPLHuPEz+AdUe0aQB63RuLq6uur7vqpOKymsi6K/rm0Nhu+8+97190cffPjRxze2b946sbo2GR5nWmpzlnKLUig8dsJJPKsM8jKVeJo+f+TPTy/RWKHVM9dUOC/5QolCZNyRK7m59TdTWqgclYNHWlmRoxFqAW 6JUCK3tUEIWVlfHI7d5B4rDM/iQ2brMmnFvbi7OGQ5SseTtmVpAS+6RFBcF05hRfd5AxIdhIfMiMXScWP06ksmVOGaEJwGnTouFIxrqm/A1sJxwg0GF7XkRrgGuKVSlYdqQStCcrQU4aRHxxy+cL0ArcG8awmtgkKgzDvAn+qenx2FIau4cYLLxBENT2KXKSrDWZZrxyQWbrz+3+3Ztb7E5+Orq/786mrStf/a3RfrFGs6k9c30ymjqjl4b0RSlXUSseksDEfPlsIC/bi0GjgsDM+F17uQegWFNj0dVGgWjdeau2XGZft9N6YclEgol7S9O03bJ91FmzMnSrSQd50HS1g34u/236Yj1LmHsXG/smm6SeiF9BVtxTMEXUBldMpTIb3gm55bWAm3hFPSn4bHIXUpp2HkKsPZaPTfyPTUVtyCdTWRyoECW4Zlu68KNP0k7SuHpKtvBzypJaUujC7hh5QyX/JNawv49lLL2olLhKcNFSwt7H9N6RFOaBL6MC7hQUVYebbsuikczOChVguhRG9/p43iVqDpd4+5sqimwFUOBwfk+urpFPai+M4IRsn2TjSL+gVvG/HG2Ak26yjZ/pPlOqtLIpxJUuQ8jio3b/1YZRK7EastkpbP+QLPyVScmjNv+9Hs4DPy5H2XC02C9d5Xb7S8tLYpU4r0LbZvnnnn/52d1664O2+FqmqHKlsXKmrp35V/6NQvg5mTDRk8o8ckMsiW3HeCOupFiN+k/LZxsjeLo1n8497O/W82clwPPg1uB+MgDu4E94PHwVFwHGSDs8HLwS+DX4fz4c/D34a/r0O3rm3ufBK8toZ//AMQgJuy</latexit>
Rewriting
xi =1
N
X
i0
�(||xi � xi0 ||)(xi0 � xi) =1
N
X
i0
�0(||xi � xi0 ||)||xi � xi0 ||
(xi � xi0)
we see this is the gradient flow of the energy JN (X) = 12N
PNi,i0=1 �(||xi�xi0 ||).
<latexit sha1_base64="TD4nuPFMRIvcfW1r1JJfZ9DoCv4=">AAADUHicfVJNb9NAEF0nfBTz0RSOXFYkKIkEkZ0LHKhUiQviEAVE2kh1sNabcbzq+kO7a0K02Z/IpTd+BxcOIFgnBpWmdGTLb98bj9+MJyo4k8rzvjqN5o2bt27v3XHv3rv/YL918PBY5qWgMKE5z8U0IhI4y2CimOIwLQSQNOJwEp29rvSTTyAky7MPalXALCWLjMWMEmWp8MCJgyxn2Rwyhd/DUjDFsoXb6bjBPFdaB1GMPx sTssMgFoT6o0CWaahZ1+CgSFhvva5TQvb8D6rU9brfu3j+K7L+TqXNWQfjhHWvq2f0/0XTu1rpV50sAUsArBImsb1UAnghyJxVLcc8X+I83pCQgViscCdIiUoo4fqtCUfbwlNT29a+0cORqb0/Y91D33wc4cr8dd47g7DV9gbeJvAu8GvQRnWMw9a5/QO0TK1LyomUp75XqJkmQjHKwbhBKaEg9Iws4NTCjKQgZ3qzEAY/tcwcx7mwt+1yw158Q5NUylUa2cyqWXlZq8irtNNSxS9nmmVFqSCj2w/FJccqx9V24TkTQBVfWUBotUwU04TYwSm7g64dgn+55V1wPBz43sB/N2wfvarHsYceoyeoh3z0Ah2hN2iMJog6X5xvzg/nZ+O88b3xq+lsUxv1Ez1C/0TT/Q1HwBEF</latexit><latexit sha1_base64="TD4nuPFMRIvcfW1r1JJfZ9DoCv4=">AAADUHicfVJNb9NAEF0nfBTz0RSOXFYkKIkEkZ0LHKhUiQviEAVE2kh1sNabcbzq+kO7a0K02Z/IpTd+BxcOIFgnBpWmdGTLb98bj9+MJyo4k8rzvjqN5o2bt27v3XHv3rv/YL918PBY5qWgMKE5z8U0IhI4y2CimOIwLQSQNOJwEp29rvSTTyAky7MPalXALCWLjMWMEmWp8MCJgyxn2Rwyhd/DUjDFsoXb6bjBPFdaB1GMPx sTssMgFoT6o0CWaahZ1+CgSFhvva5TQvb8D6rU9brfu3j+K7L+TqXNWQfjhHWvq2f0/0XTu1rpV50sAUsArBImsb1UAnghyJxVLcc8X+I83pCQgViscCdIiUoo4fqtCUfbwlNT29a+0cORqb0/Y91D33wc4cr8dd47g7DV9gbeJvAu8GvQRnWMw9a5/QO0TK1LyomUp75XqJkmQjHKwbhBKaEg9Iws4NTCjKQgZ3qzEAY/tcwcx7mwt+1yw158Q5NUylUa2cyqWXlZq8irtNNSxS9nmmVFqSCj2w/FJccqx9V24TkTQBVfWUBotUwU04TYwSm7g64dgn+55V1wPBz43sB/N2wfvarHsYceoyeoh3z0Ah2hN2iMJog6X5xvzg/nZ+O88b3xq+lsUxv1Ez1C/0TT/Q1HwBEF</latexit><latexit sha1_base64="TD4nuPFMRIvcfW1r1JJfZ9DoCv4=">AAADUHicfVJNb9NAEF0nfBTz0RSOXFYkKIkEkZ0LHKhUiQviEAVE2kh1sNabcbzq+kO7a0K02Z/IpTd+BxcOIFgnBpWmdGTLb98bj9+MJyo4k8rzvjqN5o2bt27v3XHv3rv/YL918PBY5qWgMKE5z8U0IhI4y2CimOIwLQSQNOJwEp29rvSTTyAky7MPalXALCWLjMWMEmWp8MCJgyxn2Rwyhd/DUjDFsoXb6bjBPFdaB1GMPx sTssMgFoT6o0CWaahZ1+CgSFhvva5TQvb8D6rU9brfu3j+K7L+TqXNWQfjhHWvq2f0/0XTu1rpV50sAUsArBImsb1UAnghyJxVLcc8X+I83pCQgViscCdIiUoo4fqtCUfbwlNT29a+0cORqb0/Y91D33wc4cr8dd47g7DV9gbeJvAu8GvQRnWMw9a5/QO0TK1LyomUp75XqJkmQjHKwbhBKaEg9Iws4NTCjKQgZ3qzEAY/tcwcx7mwt+1yw158Q5NUylUa2cyqWXlZq8irtNNSxS9nmmVFqSCj2w/FJccqx9V24TkTQBVfWUBotUwU04TYwSm7g64dgn+55V1wPBz43sB/N2wfvarHsYceoyeoh3z0Ah2hN2iMJog6X5xvzg/nZ+O88b3xq+lsUxv1Ez1C/0TT/Q1HwBEF</latexit><latexit sha1_base64="TD4nuPFMRIvcfW1r1JJfZ9DoCv4=">AAADUHicfVJNb9NAEF0nfBTz0RSOXFYkKIkEkZ0LHKhUiQviEAVE2kh1sNabcbzq+kO7a0K02Z/IpTd+BxcOIFgnBpWmdGTLb98bj9+MJyo4k8rzvjqN5o2bt27v3XHv3rv/YL918PBY5qWgMKE5z8U0IhI4y2CimOIwLQSQNOJwEp29rvSTTyAky7MPalXALCWLjMWMEmWp8MCJgyxn2Rwyhd/DUjDFsoXb6bjBPFdaB1GMPx sTssMgFoT6o0CWaahZ1+CgSFhvva5TQvb8D6rU9brfu3j+K7L+TqXNWQfjhHWvq2f0/0XTu1rpV50sAUsArBImsb1UAnghyJxVLcc8X+I83pCQgViscCdIiUoo4fqtCUfbwlNT29a+0cORqb0/Y91D33wc4cr8dd47g7DV9gbeJvAu8GvQRnWMw9a5/QO0TK1LyomUp75XqJkmQjHKwbhBKaEg9Iws4NTCjKQgZ3qzEAY/tcwcx7mwt+1yw158Q5NUylUa2cyqWXlZq8irtNNSxS9nmmVFqSCj2w/FJccqx9V24TkTQBVfWUBotUwU04TYwSm7g64dgn+55V1wPBz43sB/N2wfvarHsYceoyeoh3z0Ah2hN2iMJog6X5xvzg/nZ+O88b3xq+lsUxv1Ez1C/0TT/Q1HwBEF</latexit>

Measures on pairwise distances
Nonparametric inference of interaction laws in systems of agents from trajectory data, Fei Lu, Ming Zhong, Sui Tang, and MM PNAS July 16, 2019
Observations: {(xi, xi)(m)
(tl)}N,L,Mi=1,l=1,m=1, where x(m)
(0) ⇠ µ0 for some µ0 on
Rd. Note that each state of the system is in RdN
.
All we want however is the one-dimensional interaction kernel � in the equations
x(m)i0 (t) =
1
N
NX
i0=1
�(||x(m)i0 (t)� x(m)
i (t)||| {z }
r(m)
ii0 (t)
)(x(m)i0 (t)� x(m)
i (t)) .
<latexit sha1_base64="wxAV2UIAxkMcrbVQkCB0NZyUvzc=">AAAEEXicjVPLbtQwFE1neJTwaAtLNhYN6kSajpKqEghRqYgNCxgKog+pnkZOctNYdeJgO52OMvkFNvwKGxYgxJYdO/4GOxOgrwWWIh2fe8+177lxWDAqlef9mut0r1y9dn3+hn3z1u07C4tLd3ckL0UE2xFnXOyFRAKjOWwrqhjsFQJIFjLYDY+em/juMQhJef5OTQoYZeQwpwmNiNJUsNRZwTmneQy5Qq9DCeK4CcgnyMFVr8 Jhgk7qgPZxzNXfnXtQ9TK37qmAubgOKrrh95n+sg2/PqiG/Zf9V7XTR+MUBCCnlbUaz8WSZjgrA89BCRdI8kwntQTPDSQqDcPqbX0QOwM05AqQSolCQKIUSUX0nieaAiQnUkGGqET0rLCKh7UzsO1/zT1jDI0BjYnGKR+DNsXoTBWew2pMM8iNS4QhrOBENdZWISuhrmiuQJDIGIOOQOTAan3a+SxcpLR2zE1MUXhfzpy0Hcc+5d7MBu3ZivbP3cCJLuwPsSwzwxkDhxcv0JTu4VK3IkItgGo6vbTe6lmWamo61VGhE3TGn7m5tdv7X71r4/7AcYLFZW/gNQtdBH4Llq12bQWLP3XXUaltVREjUu77XqFGFRGKRgxqG5cSChIdkUPY1zAnGchR1XRdo4eaiZvfI+F6YA17WlGRTMpJFupMM3R5PmbIy2L7pUoej/RAi1JBHs0OSkqGFEfmeaCYCogUm2hAIkH1XVGUEjN8/YhsbYJ/vuWLYGdt4K8P1t+sLW8+be2Yt+5bD6ye5VuPrE3rhbVlbVtR50PnU+dL52v3Y/dz91v3+yy1M9dq7llnVvfHbzpzUuo=</latexit>
For a fixed t = tl and m, we cannot just solve for �(rii0), as we have N(N�1)/2unknowns and only dN knowns. We have to leverage observations in time.
<latexit sha1_base64="6jAzncycXOlmJSv3IvGR2WHKQZg=">AAACqnicbVFNb9NAEF2brxK+Ahy5jIhRU6mkcVSpPYBUCQlxISqIJEVJFK3X42bJetfaHaeNrPw4/gI3/g0bJwdomdPTm3maeW+SQklH3e7vILxz9979B3sPG48eP3n6rPn8xdCZ0gocCKOMvUi4QyU1DkiSwovCIs8ThaNk8WHTHy3ROmn0N1oVOM35pZaZFJw8NWv+nGgjdYqa4KOxwCGT15hCRO9ppiLg2uM8OoQrBMG1Ng Q/SkfgjFoiZF4RTQivqT6kSlSJ62pSzOW6bWeVlPvrA6/lbiOfc6+I+u3+2/jgqBdBqRfaXGlX7zBarSBK+xFsyQ6MdgoyoNA74JcIJnFol/XlDqQGkjl2Zs1Wt9OtC26DeAdabFfns+avSWpEmXvPQnHnxnG3oGnFLUmhcN2YlA4LLhZ+49hDzXN006p2uIY3nklr45nxmdXs34qK586t8sRP5pzm7mZvQ/6vNy4pO51WUhcloRbbRVmpNv43f4NUWhTkU0olF1b6W0HMueWC/HcbPoT4puXbYNjrxMed4y+91tm7XRx77BV7zdosZifsjH1i52zARLAffA6GwSg8DL+G38PxdjQMdpqX7J8K0z+M883W</latexit>
At time scale [0, T ], we define the probability measure on R+:
⇢LT (r) := Ex(0)⇠µ0
1�N2
�L
LX
l=1
NX
i,i0=1,i<i0
�r(m)
ii0 (tl)(r) .
<latexit sha1_base64="WpMIBZrB6I9DjQe7eGOaBMV79oA=">AAAC1XicbVJNbxMxEHWWr7J8BThyGZFFSUQU7UaVQFUjFSEkDlVVqqSplE1WXq+3sWqvV7YXGll7ACGu/Ddu/Ad+BE6aImgZydbzzJux543TkjNtwvBnw7tx89btO1t3/Xv3Hzx81Hz85FjLShE6JpJLdZJiTTkr6Ngww+lJqSgWKaeT9OztKj75SJVmshiZZUlnAp8WLGcEG+dKmr/iQrIio4WBNwYMExQ0wZxCMA17o2DWg08UMpq78mAWFEolU5wyzswSBMW6UhRkAUEssFmkqT2qk5fBju//KesHQawWMhnN9zuqCztDuKS+qxN73gm7sWYiFlUS1nGuMLFRbe1BTBZSajqoYb+OdSUSy4cQ1XN7eWQ91h5GPWC7wNpQzw/ijHKDE6tcjLUdsyO6dcck3O2qG/f6QZA0W2E/XBtcB9EGtNDGDpPmjziTpBKuD8Kx1tMoLM3MYmUY4bT240rTEpMzfEqnDhZYUD2z66nU8MJ5MsilcsvJu/b+nWGx0HopUsdcKaKvxlbO/8WmlclfzywrysrQglxclFccjITViCFjihLDlw5goph7K5AFdtIa9xF8J0J0teXr4HjQj7b72x8Grb3djRxb6Bl6jjooQq/QHnqPDtEYkcZR47zxufHFm3i199X7dkH1Gpucp+gf877/BvOs3jY=</latexit>

Many short time trajectories learning
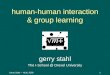
1 1.5 2 2.5 3 3.5r, pairwise distances
-1200
-1000
-800
-600
-400
-200
0
True Learned
Example. The Lennard Jones force is thederivative of the potential
VLJ(r) = 4✏⇣�
�r
�12 ���r
�6⌘.
Right figure: In blue the LJ �,superimposed to an empirical estimate of ⇢LT ,for a system of N = 7 agents, and L, T small.
<latexit sha1_base64="fQLn8IZc/gzTVpDoQvIhS2olwps=">AAADYHicfVJdaxNBFN0kamtsbatv+nKxK6QQQ7aIFbFQEEFLkCpJWsimYXb2bjJ0vpiZDYYlf9I3H3zxlzi7DdK04n0YDvfcr3PvJJoz67rdn7V64979BxubD5uPtrYf7+zuPRlalRuKA6q4MhcJsciZxIFjjuOFNkhEwvE8ufpQ8udzNJYp2XcLjWNBppJljBLnXZO92jyWiskUpSviJIOP34nQHJcd6M8QeiglMSmcKokWMuV7ArPgPNVs/k2EFA2b+4JzBJVVrFbOE4zwtbhwOCl6p8uWOTh+HaO2jCsZc8xca/VmhtDYsqkgYGLDpjN3cFlEh8tX/+HfrEDYWev1rXRCxqa5wXfwWULCc6xm651CGOsZC9trCTbXXobQymIKTgGRgEIz41fFAa1jgrhKXxibmZr0L3th+2a+3w4QsAvrUFRhX46PQiBTz9m2r5ZC2Gv3Q7CCcN6Z7O53O93K4C6IVmA/WNnZZPdHnCqaC1+OcmLtKOpqNy6IcYz6ezXj3KIm9Mo3HHkoiUA7LqoPsoSXeSmqnDBTftTKezOjIMLahUh8pFc5s7e50vkvbpS77O24YFLn/t70ulGW83J/5W+DlBmkji88INQwPyvQGfFXdP5PNv0SotuS74LhYSfqdqKvh/sn71fr2AyeBy+CVhAFR8FJ8Ck4CwYBrf2qN+pb9e3678ZmY6exdx1ar61yngZr1nj2B8ftDAc=</latexit><latexit sha1_base64="fQLn8IZc/gzTVpDoQvIhS2olwps=">AAADYHicfVJdaxNBFN0kamtsbatv+nKxK6QQQ7aIFbFQEEFLkCpJWsimYXb2bjJ0vpiZDYYlf9I3H3zxlzi7DdK04n0YDvfcr3PvJJoz67rdn7V64979BxubD5uPtrYf7+zuPRlalRuKA6q4MhcJsciZxIFjjuOFNkhEwvE8ufpQ8udzNJYp2XcLjWNBppJljBLnXZO92jyWiskUpSviJIOP34nQHJcd6M8QeiglMSmcKokWMuV7ArPgPNVs/k2EFA2b+4JzBJVVrFbOE4zwtbhwOCl6p8uWOTh+HaO2jCsZc8xca/VmhtDYsqkgYGLDpjN3cFlEh8tX/+HfrEDYWev1rXRCxqa5wXfwWULCc6xm651CGOsZC9trCTbXXobQymIKTgGRgEIz41fFAa1jgrhKXxibmZr0L3th+2a+3w4QsAvrUFRhX46PQiBTz9m2r5ZC2Gv3Q7CCcN6Z7O53O93K4C6IVmA/WNnZZPdHnCqaC1+OcmLtKOpqNy6IcYz6ezXj3KIm9Mo3HHkoiUA7LqoPsoSXeSmqnDBTftTKezOjIMLahUh8pFc5s7e50vkvbpS77O24YFLn/t70ulGW83J/5W+DlBmkji88INQwPyvQGfFXdP5PNv0SotuS74LhYSfqdqKvh/sn71fr2AyeBy+CVhAFR8FJ8Ck4CwYBrf2qN+pb9e3678ZmY6exdx1ar61yngZr1nj2B8ftDAc=</latexit><latexit sha1_base64="fQLn8IZc/gzTVpDoQvIhS2olwps=">AAADYHicfVJdaxNBFN0kamtsbatv+nKxK6QQQ7aIFbFQEEFLkCpJWsimYXb2bjJ0vpiZDYYlf9I3H3zxlzi7DdK04n0YDvfcr3PvJJoz67rdn7V64979BxubD5uPtrYf7+zuPRlalRuKA6q4MhcJsciZxIFjjuOFNkhEwvE8ufpQ8udzNJYp2XcLjWNBppJljBLnXZO92jyWiskUpSviJIOP34nQHJcd6M8QeiglMSmcKokWMuV7ArPgPNVs/k2EFA2b+4JzBJVVrFbOE4zwtbhwOCl6p8uWOTh+HaO2jCsZc8xca/VmhtDYsqkgYGLDpjN3cFlEh8tX/+HfrEDYWev1rXRCxqa5wXfwWULCc6xm651CGOsZC9trCTbXXobQymIKTgGRgEIz41fFAa1jgrhKXxibmZr0L3th+2a+3w4QsAvrUFRhX46PQiBTz9m2r5ZC2Gv3Q7CCcN6Z7O53O93K4C6IVmA/WNnZZPdHnCqaC1+OcmLtKOpqNy6IcYz6ezXj3KIm9Mo3HHkoiUA7LqoPsoSXeSmqnDBTftTKezOjIMLahUh8pFc5s7e50vkvbpS77O24YFLn/t70ulGW83J/5W+DlBmkji88INQwPyvQGfFXdP5PNv0SotuS74LhYSfqdqKvh/sn71fr2AyeBy+CVhAFR8FJ8Ck4CwYBrf2qN+pb9e3678ZmY6exdx1ar61yngZr1nj2B8ftDAc=</latexit><latexit sha1_base64="fQLn8IZc/gzTVpDoQvIhS2olwps=">AAADYHicfVJdaxNBFN0kamtsbatv+nKxK6QQQ7aIFbFQEEFLkCpJWsimYXb2bjJ0vpiZDYYlf9I3H3zxlzi7DdK04n0YDvfcr3PvJJoz67rdn7V64979BxubD5uPtrYf7+zuPRlalRuKA6q4MhcJsciZxIFjjuOFNkhEwvE8ufpQ8udzNJYp2XcLjWNBppJljBLnXZO92jyWiskUpSviJIOP34nQHJcd6M8QeiglMSmcKokWMuV7ArPgPNVs/k2EFA2b+4JzBJVVrFbOE4zwtbhwOCl6p8uWOTh+HaO2jCsZc8xca/VmhtDYsqkgYGLDpjN3cFlEh8tX/+HfrEDYWev1rXRCxqa5wXfwWULCc6xm651CGOsZC9trCTbXXobQymIKTgGRgEIz41fFAa1jgrhKXxibmZr0L3th+2a+3w4QsAvrUFRhX46PQiBTz9m2r5ZC2Gv3Q7CCcN6Z7O53O93K4C6IVmA/WNnZZPdHnCqaC1+OcmLtKOpqNy6IcYz6ezXj3KIm9Mo3HHkoiUA7LqoPsoSXeSmqnDBTftTKezOjIMLahUh8pFc5s7e50vkvbpS77O24YFLn/t70ulGW83J/5W+DlBmkji88INQwPyvQGfFXdP5PNv0SotuS74LhYSfqdqKvh/sn71fr2AyeBy+CVhAFR8FJ8Ck4CwYBrf2qN+pb9e3678ZmY6exdx1ar61yngZr1nj2B8ftDAc=</latexit>
Measures on pairwise distancesObservations: {(xi, xi)
(m)(tl)}N,L,M
i=1,l=1,m=1, where x(m)(0) ⇠ µ0 for some µ0 on
Rd. Note that each state of the system is in RdN
.
All we want however is the one-dimensional interaction kernel � in the equations
x(m)i0 (t) =
1
N
NX
i0=1
�(||x(m)i0 (t)� x(m)
i (t)||| {z }
r(m)
ii0 (t)
)(x(m)i0 (t)� x(m)
i (t)) .
<latexit sha1_base64="wxAV2UIAxkMcrbVQkCB0NZyUvzc=">AAAEEXicjVPLbtQwFE1neJTwaAtLNhYN6kSajpKqEghRqYgNCxgKog+pnkZOctNYdeJgO52OMvkFNvwKGxYgxJYdO/4GOxOgrwWWIh2fe8+177lxWDAqlef9mut0r1y9dn3+hn3z1u07C4tLd3ckL0UE2xFnXOyFRAKjOWwrqhjsFQJIFjLYDY+em/juMQhJef5OTQoYZeQwpwmNiNJUsNRZwTmneQy5Qq9DCeK4CcgnyMFVr8 Jhgk7qgPZxzNXfnXtQ9TK37qmAubgOKrrh95n+sg2/PqiG/Zf9V7XTR+MUBCCnlbUaz8WSZjgrA89BCRdI8kwntQTPDSQqDcPqbX0QOwM05AqQSolCQKIUSUX0nieaAiQnUkGGqET0rLCKh7UzsO1/zT1jDI0BjYnGKR+DNsXoTBWew2pMM8iNS4QhrOBENdZWISuhrmiuQJDIGIOOQOTAan3a+SxcpLR2zE1MUXhfzpy0Hcc+5d7MBu3ZivbP3cCJLuwPsSwzwxkDhxcv0JTu4VK3IkItgGo6vbTe6lmWamo61VGhE3TGn7m5tdv7X71r4/7AcYLFZW/gNQtdBH4Llq12bQWLP3XXUaltVREjUu77XqFGFRGKRgxqG5cSChIdkUPY1zAnGchR1XRdo4eaiZvfI+F6YA17WlGRTMpJFupMM3R5PmbIy2L7pUoej/RAi1JBHs0OSkqGFEfmeaCYCogUm2hAIkH1XVGUEjN8/YhsbYJ/vuWLYGdt4K8P1t+sLW8+be2Yt+5bD6ye5VuPrE3rhbVlbVtR50PnU+dL52v3Y/dz91v3+yy1M9dq7llnVvfHbzpzUuo=</latexit>
At time scale [0, T ], we define the probability measure on R+:
⇢LT (r) := Ex(0)⇠µ0
1�N2
�L
LX
l=1
NX
i,i0=1,i<i0
�r(m)
ii0 (tl)(r) .
<latexit sha1_base64="WpMIBZrB6I9DjQe7eGOaBMV79oA=">AAAC1XicbVJNbxMxEHWWr7J8BThyGZFFSUQU7UaVQFUjFSEkDlVVqqSplE1WXq+3sWqvV7YXGll7ACGu/Ddu/Ad+BE6aImgZydbzzJux543TkjNtwvBnw7tx89btO1t3/Xv3Hzx81Hz85FjLShE6JpJLdZJiTTkr6Ngww+lJqSgWKaeT9OztKj75SJVmshiZZUlnAp8WLGcEG+dKmr/iQrIio4WBNwYMExQ0wZxCMA17o2DWg08UMpq78mAWFEolU5wyzswSBMW6UhRkAUEssFmkqT2qk5fBju//KesHQawWMhnN9zuqCztDuKS+qxN73gm7sWYiFlUS1nGuMLFRbe1BTBZSajqoYb+OdSUSy4cQ1XN7eWQ91h5GPWC7wNpQzw/ijHKDE6tcjLUdsyO6dcck3O2qG/f6QZA0W2E/XBtcB9EGtNDGDpPmjziTpBKuD8Kx1tMoLM3MYmUY4bT240rTEpMzfEqnDhZYUD2z66nU8MJ5MsilcsvJu/b+nWGx0HopUsdcKaKvxlbO/8WmlclfzywrysrQglxclFccjITViCFjihLDlw5goph7K5AFdtIa9xF8J0J0teXr4HjQj7b72x8Grb3djRxb6Bl6jjooQq/QHnqPDtEYkcZR47zxufHFm3i199X7dkH1Gpucp+gf877/BvOs3jY=</latexit>

The estimator
For H linear subspace, this is a least squares problem (Gauss, Legendre); thesubspace serves as a regularizer.
<latexit sha1_base64="ZnDRCgIOSXKHoHtTBEbne7Jdnvc=">AAACbnicbVFNixNBEO0Zv9b4lVXw4CIWZoUIS5jZi4IeFgTdg4cVzO5CEkJNpyZptqd77OpeiEOO/kFv/gYv/gR7skF016IPj1dVr6peF7VW7LPsR5Jeu37j5q2t2507d+/df9DdfnjMNjhJQ2m1dacFMmllaOiV13RaO8Kq0HRSnL1r8yfn5FhZ89kva5pUODeqVBJ9pKbdb2NjlZmR8fDeOtgdV+gXEnVzuNqFVhQdcCi4Rk l74BeKIT4ETcge+EtARwy1s3FgBf0PGJj34CPNycwcvXwTW+iPADC581iOrYKjedDo1Fdyg2m3lw2ydcBVkG9AT2ziaNr9Pp5ZGaq4t9TIPMqz2k8adF5JTavOODDFiWc4p1GEBiviSbO2awUvIjODMp5b2nj3mv27o8GKeVkVsbJ1gy/nWvJ/uVHw5etJo0wdPBl5MagMGryF1nuYKUfS62UEKJ2Ku4JcoEPp4w91ogn55ZOvguP9QZ4N8k/7vYO3Gzu2xI54LvoiF6/EgTgUR2IopPiZbCdPkp3kV/o4fZo+uyhNk03PI/FPpP3fNua62w==</latexit><latexit sha1_base64="ZnDRCgIOSXKHoHtTBEbne7Jdnvc=">AAACbnicbVFNixNBEO0Zv9b4lVXw4CIWZoUIS5jZi4IeFgTdg4cVzO5CEkJNpyZptqd77OpeiEOO/kFv/gYv/gR7skF016IPj1dVr6peF7VW7LPsR5Jeu37j5q2t2507d+/df9DdfnjMNjhJQ2m1dacFMmllaOiV13RaO8Kq0HRSnL1r8yfn5FhZ89kva5pUODeqVBJ9pKbdb2NjlZmR8fDeOtgdV+gXEnVzuNqFVhQdcCi4Rk l74BeKIT4ETcge+EtARwy1s3FgBf0PGJj34CPNycwcvXwTW+iPADC581iOrYKjedDo1Fdyg2m3lw2ydcBVkG9AT2ziaNr9Pp5ZGaq4t9TIPMqz2k8adF5JTavOODDFiWc4p1GEBiviSbO2awUvIjODMp5b2nj3mv27o8GKeVkVsbJ1gy/nWvJ/uVHw5etJo0wdPBl5MagMGryF1nuYKUfS62UEKJ2Ku4JcoEPp4w91ogn55ZOvguP9QZ4N8k/7vYO3Gzu2xI54LvoiF6/EgTgUR2IopPiZbCdPkp3kV/o4fZo+uyhNk03PI/FPpP3fNua62w==</latexit><latexit sha1_base64="ZnDRCgIOSXKHoHtTBEbne7Jdnvc=">AAACbnicbVFNixNBEO0Zv9b4lVXw4CIWZoUIS5jZi4IeFgTdg4cVzO5CEkJNpyZptqd77OpeiEOO/kFv/gYv/gR7skF016IPj1dVr6peF7VW7LPsR5Jeu37j5q2t2507d+/df9DdfnjMNjhJQ2m1dacFMmllaOiV13RaO8Kq0HRSnL1r8yfn5FhZ89kva5pUODeqVBJ9pKbdb2NjlZmR8fDeOtgdV+gXEnVzuNqFVhQdcCi4Rk l74BeKIT4ETcge+EtARwy1s3FgBf0PGJj34CPNycwcvXwTW+iPADC581iOrYKjedDo1Fdyg2m3lw2ydcBVkG9AT2ziaNr9Pp5ZGaq4t9TIPMqz2k8adF5JTavOODDFiWc4p1GEBiviSbO2awUvIjODMp5b2nj3mv27o8GKeVkVsbJ1gy/nWvJ/uVHw5etJo0wdPBl5MagMGryF1nuYKUfS62UEKJ2Ku4JcoEPp4w91ogn55ZOvguP9QZ4N8k/7vYO3Gzu2xI54LvoiF6/EgTgUR2IopPiZbCdPkp3kV/o4fZo+uyhNk03PI/FPpP3fNua62w==</latexit><latexit sha1_base64="ZnDRCgIOSXKHoHtTBEbne7Jdnvc=">AAACbnicbVFNixNBEO0Zv9b4lVXw4CIWZoUIS5jZi4IeFgTdg4cVzO5CEkJNpyZptqd77OpeiEOO/kFv/gYv/gR7skF016IPj1dVr6peF7VW7LPsR5Jeu37j5q2t2507d+/df9DdfnjMNjhJQ2m1dacFMmllaOiV13RaO8Kq0HRSnL1r8yfn5FhZ89kva5pUODeqVBJ9pKbdb2NjlZmR8fDeOtgdV+gXEnVzuNqFVhQdcCi4Rk l74BeKIT4ETcge+EtARwy1s3FgBf0PGJj34CPNycwcvXwTW+iPADC581iOrYKjedDo1Fdyg2m3lw2ydcBVkG9AT2ziaNr9Pp5ZGaq4t9TIPMqz2k8adF5JTavOODDFiWc4p1GEBiviSbO2awUvIjODMp5b2nj3mv27o8GKeVkVsbJ1gy/nWvJ/uVHw5etJo0wdPBl5MagMGryF1nuYKUfS62UEKJ2Ku4JcoEPp4w91ogn55ZOvguP9QZ4N8k/7vYO3Gzu2xI54LvoiF6/EgTgUR2IopPiZbCdPkp3kV/o4fZo+uyhNk03PI/FPpP3fNua62w==</latexit>
Observations: {(x(m)i , x(m)
i )(tl)}N,L,MI=1,l=1,m=1, for M di↵erent IC’s, from
x(m)i (t) =
1
N
X
i0
�(||x(m)i0 (t)� x(m)
i (t)||)(x(m)i0 (t)� x(m)
i (t)) =: f�(x(m)i (t)) .
<latexit sha1_base64="phOYvYEbousRhjBrvUglkiDJORs=">AAADWnicfVJda9swFFWcrR/uPtJtb3sRi0djcEOcPWyUBQp9WWHtOljaQpQZWZEbUck2klwaFP/JvYzB/spgspt1XRN2QXA551zde48U55wp3ev9aDjNBw/X1jc23a1Hj588bW0/O1VZIQkdkoxn8jzGinKW0qFmmtPzXFIsYk7P4suDij+7olKxLP2iZzkdC3yRsoQRrC0UbTdylGYsndBUw0+xovKqJtQe9JDpIIH1NE7MdfnVdIRfRixAk0ybv/gt4Xd0xH1URuZwEAbcHjEILXscfAyOSi+ASSahd+TBCUsSKqt+hwc7yuIyE67nuXcvhrcNDSs72h+gRGISHiNVCAvtlNAgTa91vb+JeUFLlE+tdD5fGrmS2yt2l3ex6HzuLy/53wp/sPcHT6x09RirK10UdD0varV73V4dcDkJF0kbLOIkan2z1pBCWMsIx0qNwl6uxwZLzQinpYsKRXNMLvEFHdk0xYKqsalnKuFri0xq75PMWl6jdysMFkrNRGyV1czqPleBq7hRoZN3Y8PSvNA0JTeNkoJDncHqn9lnlpRoPrMJJpLZWSGZYvuK2v5G15oQ3l95OTntd8M33f7nfnv//cKODfASvAIdEIK3YB98ACdgCEjje+OXs+asOz+bTnOzuXUjdRqLmufgn2i++A0rmRB5</latexit>
Consider the empirical error functional
EL,M (') :=1
LMN
L,M,NX
l,m,i=1
��x(m)i (tl)� f'(x
(m)i (tl))
��2 .
Our estimator is defined as a minimizer of EL,M over ' 2 H, a suitable hypoth-
esis space of functions on R+, with dim(H) = n (with n = n(M)):
�L,M,H := arg min'2H
EL,M (') .<latexit sha1_base64="x1etkuIn8sSjZ5PGdHlFjeJJqgY=">AAAEQXiclVNLb9NAEHYTHiW8WjhyWVEjOSJEcTiAKiJVqpB6aKAg+pDq1Fqv1/Gq3rW1uy4Ny/41LvwDbty5cAAhrlwYOymkLT2wp/HMfPPNfDOOiowp3et9Xmg0L12+cnXxWuv6jZu3bi8t39lReSkJ3SZ5lsu9CCuaMUG3NdMZ3SskxTzK6G50uF7Fd4+oVCwXb/SkoCOOx4IljGANrnC5sRuInImYCo3Wc6FYTCXSKUWUF0 xCWoaolLlESSlIBcFZy3VbAcc6haB5bkOz2RlazwSaHuu6ISNpbIMjLIuU2TZaHaAgkZgY35rN4QsbqJKHJuvwDhsg3x5U+A64IzYO3gdxrk1dPUrMsbUhOzAeb1tPh1n70UkgAdYL+Dz0Fz2FhqwGt6cEB/2g04UJXpYSUaUZJMN0TKGYJqBhjLBCGHEmGGfvQIs8Qe65aV2Ug6gQmJIGTPxJ2bBuBwqokmkMS0DppMhBTwUMqsCEVgVPtFQoF7PqUWRe2/AhYN8ynaKYcdebq9keCBd5dcgVA+EN2257FRYxr0KUldSaIMU6qISYttqZK2JXB/WX5AbLsQ1gyNBcpOPpmex/LHyqb7i00uv26ofOG/7MWHFmbytc+gS7JyWHSyQZVmrf7xV6BJ1qRjJqW0GpKAh4iMd0H0yBOVUjU/Nb9AA8MUqqO83hkmvvPMJgrtSER5BZDaLOxirnv2L7pU6ejgwTRampIFOipMyQzlH1O8GiJCU6m4CBiWTQKyIphmvX8NNVIvhnRz5v7PS7/uNu/1V/Ze3ZTI5F555z3/Ec33nirDkbzpaz7ZDGh8aXxrfG9+bH5tfmj+bPaWpjYYa565x6zV+/Adgtblo=</latexit>

Coercivity condition
Lemma. Coercivity =) unique minimizer of limM!+1 EL,M (') over ' 2 H<latexit sha1_base64="1ouX9bf3ii2TrnoyeT1jz3t1cGo=">AAACfXicbVHLatwwFJXdVzp9TdplN6IzgaQNxs4mXXQRCIUsEkihkwRGg5E11zOX6OFK8gTX+C/6Zd31V7ppNQ9Km/SC4Oicc9G5V0Ul0fk0/RHF9+4/ePho63HvydNnz1/0t19eOFNbASNhpLFXBXcgUcPIo5dwVVngqpBwWVwfL/XLBViHRn/2TQUTxWcaSxTcByrvf2PaoJ6C9rRlRUlPQSneJfTYgBW4QN/QIUMVooAb0lrjlxqoQo0Kv4KlpgyyRJW3Z8zibO65tebmHUNd+qZjivu54LL92OXt6f5Zt8sW3FZz3BtSE1KF3vU9+P94T7ph3h+kSboqehdkGzAgmzrP+9/Z1IhahTGE5M6Ns7Tyk5Zbj0JC12O1g4qLaz6DcYCaK3CTdrW9ju4EZkpLY8MJa1ixf3e0XDnXqCI4lxndbW1J/k8b1758P2lRV7UHLdYPlbWk3tDlV9ApWhBeNgFwYTFkpWLOLRc+fFgvLCG7PfJdcHGQZGmSfToYHH3YrGOLvCZvyC7JyCE5IifknIyIID8jGu1Fb6Nf8U68Hydraxxtel6Rfyo+/A0jC8LU</latexit><latexit sha1_base64="1ouX9bf3ii2TrnoyeT1jz3t1cGo=">AAACfXicbVHLatwwFJXdVzp9TdplN6IzgaQNxs4mXXQRCIUsEkihkwRGg5E11zOX6OFK8gTX+C/6Zd31V7ppNQ9Km/SC4Oicc9G5V0Ul0fk0/RHF9+4/ePho63HvydNnz1/0t19eOFNbASNhpLFXBXcgUcPIo5dwVVngqpBwWVwfL/XLBViHRn/2TQUTxWcaSxTcByrvf2PaoJ6C9rRlRUlPQSneJfTYgBW4QN/QIUMVooAb0lrjlxqoQo0Kv4KlpgyyRJW3Z8zibO65tebmHUNd+qZjivu54LL92OXt6f5Zt8sW3FZz3BtSE1KF3vU9+P94T7ph3h+kSboqehdkGzAgmzrP+9/Z1IhahTGE5M6Ns7Tyk5Zbj0JC12O1g4qLaz6DcYCaK3CTdrW9ju4EZkpLY8MJa1ixf3e0XDnXqCI4lxndbW1J/k8b1758P2lRV7UHLdYPlbWk3tDlV9ApWhBeNgFwYTFkpWLOLRc+fFgvLCG7PfJdcHGQZGmSfToYHH3YrGOLvCZvyC7JyCE5IifknIyIID8jGu1Fb6Nf8U68Hydraxxtel6Rfyo+/A0jC8LU</latexit><latexit sha1_base64="1ouX9bf3ii2TrnoyeT1jz3t1cGo=">AAACfXicbVHLatwwFJXdVzp9TdplN6IzgaQNxs4mXXQRCIUsEkihkwRGg5E11zOX6OFK8gTX+C/6Zd31V7ppNQ9Km/SC4Oicc9G5V0Ul0fk0/RHF9+4/ePho63HvydNnz1/0t19eOFNbASNhpLFXBXcgUcPIo5dwVVngqpBwWVwfL/XLBViHRn/2TQUTxWcaSxTcByrvf2PaoJ6C9rRlRUlPQSneJfTYgBW4QN/QIUMVooAb0lrjlxqoQo0Kv4KlpgyyRJW3Z8zibO65tebmHUNd+qZjivu54LL92OXt6f5Zt8sW3FZz3BtSE1KF3vU9+P94T7ph3h+kSboqehdkGzAgmzrP+9/Z1IhahTGE5M6Ns7Tyk5Zbj0JC12O1g4qLaz6DcYCaK3CTdrW9ju4EZkpLY8MJa1ixf3e0XDnXqCI4lxndbW1J/k8b1758P2lRV7UHLdYPlbWk3tDlV9ApWhBeNgFwYTFkpWLOLRc+fFgvLCG7PfJdcHGQZGmSfToYHH3YrGOLvCZvyC7JyCE5IifknIyIID8jGu1Fb6Nf8U68Hydraxxtel6Rfyo+/A0jC8LU</latexit><latexit sha1_base64="1ouX9bf3ii2TrnoyeT1jz3t1cGo=">AAACfXicbVHLatwwFJXdVzp9TdplN6IzgaQNxs4mXXQRCIUsEkihkwRGg5E11zOX6OFK8gTX+C/6Zd31V7ppNQ9Km/SC4Oicc9G5V0Ul0fk0/RHF9+4/ePho63HvydNnz1/0t19eOFNbASNhpLFXBXcgUcPIo5dwVVngqpBwWVwfL/XLBViHRn/2TQUTxWcaSxTcByrvf2PaoJ6C9rRlRUlPQSneJfTYgBW4QN/QIUMVooAb0lrjlxqoQo0Kv4KlpgyyRJW3Z8zibO65tebmHUNd+qZjivu54LL92OXt6f5Zt8sW3FZz3BtSE1KF3vU9+P94T7ph3h+kSboqehdkGzAgmzrP+9/Z1IhahTGE5M6Ns7Tyk5Zbj0JC12O1g4qLaz6DcYCaK3CTdrW9ju4EZkpLY8MJa1ixf3e0XDnXqCI4lxndbW1J/k8b1758P2lRV7UHLdYPlbWk3tDlV9ApWhBeNgFwYTFkpWLOLRc+fFgvLCG7PfJdcHGQZGmSfToYHH3YrGOLvCZvyC7JyCE5IifknIyIID8jGu1Fb6Nf8U68Hydraxxtel6Rfyo+/A0jC8LU</latexit>
EL,M (') :=1
LMN
L,M,NX
l,m,i=1
��x(m)i (tl)� f'(x
(m)i (tl))
��2,
�L,M,H := arg min'2H
EL,M (') .<latexit sha1_base64="4JaLFjl/emTPRdZ2c+tgG1hq0vs=">AAAC8XicdVJdb9MwFHXCx0b56uCRF4sWKZVClfQFNFFpEkLaw4aGRLdJdRs5rtNas5PIdiYq43/BCw8gxCv/hjf+DU4aYGxwJUvH5x5fn+vrtORM6Sj64fnXrt+4ubV9q3P7zt1797s7D45VUUlCJ6TghTxNsaKc5XSimeb0tJQUi5TTk/TsZZ0/OadSsSJ/q9clnQm8zFnGCNaOSna8rX6/gwTWK4K5eWUTcxAe2gCdY1mu2ADujiHKJCYmtubg8LVFqhKJ4aEI2RjGdl7LQ0enbIneo0WhTVMszcw7axM2N4EY2EAnfPD0VyKzSVs+gH/EG2XCGu1gU28+Cp27fh+tsEZO35gLf7vdt3Z33OykMFguLRIsT0xbHLH8ovL/PaJw6G5Jur1oGDUBr4K4BT3QxlHS/e7aJZWguSYcKzWNo1LPnA/NCKe2gypFS0zO8JJOHcyxoGpmmolZ+MQxC5gV0q1cw4a9eMJgodRapE5Z+1aXczX5r9y00tnzmWF5WWmak81FWcWhLmA9frhgkhLN1w5gIpnzCskKuwFr90nqR4gvt3wVHI+GcTSM34x6ey/a59gGj8BjEIAYPAN7YB8cgQkgXu598D55n33lf/S/+F83Ut9rzzwEf4X/7SdJSOyH</latexit><latexit sha1_base64="4JaLFjl/emTPRdZ2c+tgG1hq0vs=">AAAC8XicdVJdb9MwFHXCx0b56uCRF4sWKZVClfQFNFFpEkLaw4aGRLdJdRs5rtNas5PIdiYq43/BCw8gxCv/hjf+DU4aYGxwJUvH5x5fn+vrtORM6Sj64fnXrt+4ubV9q3P7zt1797s7D45VUUlCJ6TghTxNsaKc5XSimeb0tJQUi5TTk/TsZZ0/OadSsSJ/q9clnQm8zFnGCNaOSna8rX6/gwTWK4K5eWUTcxAe2gCdY1mu2ADujiHKJCYmtubg8LVFqhKJ4aEI2RjGdl7LQ0enbIneo0WhTVMszcw7axM2N4EY2EAnfPD0VyKzSVs+gH/EG2XCGu1gU28+Cp27fh+tsEZO35gLf7vdt3Z33OykMFguLRIsT0xbHLH8ovL/PaJw6G5Jur1oGDUBr4K4BT3QxlHS/e7aJZWguSYcKzWNo1LPnA/NCKe2gypFS0zO8JJOHcyxoGpmmolZ+MQxC5gV0q1cw4a9eMJgodRapE5Z+1aXczX5r9y00tnzmWF5WWmak81FWcWhLmA9frhgkhLN1w5gIpnzCskKuwFr90nqR4gvt3wVHI+GcTSM34x6ey/a59gGj8BjEIAYPAN7YB8cgQkgXu598D55n33lf/S/+F83Ut9rzzwEf4X/7SdJSOyH</latexit><latexit sha1_base64="4JaLFjl/emTPRdZ2c+tgG1hq0vs=">AAAC8XicdVJdb9MwFHXCx0b56uCRF4sWKZVClfQFNFFpEkLaw4aGRLdJdRs5rtNas5PIdiYq43/BCw8gxCv/hjf+DU4aYGxwJUvH5x5fn+vrtORM6Sj64fnXrt+4ubV9q3P7zt1797s7D45VUUlCJ6TghTxNsaKc5XSimeb0tJQUi5TTk/TsZZ0/OadSsSJ/q9clnQm8zFnGCNaOSna8rX6/gwTWK4K5eWUTcxAe2gCdY1mu2ADujiHKJCYmtubg8LVFqhKJ4aEI2RjGdl7LQ0enbIneo0WhTVMszcw7axM2N4EY2EAnfPD0VyKzSVs+gH/EG2XCGu1gU28+Cp27fh+tsEZO35gLf7vdt3Z33OykMFguLRIsT0xbHLH8ovL/PaJw6G5Jur1oGDUBr4K4BT3QxlHS/e7aJZWguSYcKzWNo1LPnA/NCKe2gypFS0zO8JJOHcyxoGpmmolZ+MQxC5gV0q1cw4a9eMJgodRapE5Z+1aXczX5r9y00tnzmWF5WWmak81FWcWhLmA9frhgkhLN1w5gIpnzCskKuwFr90nqR4gvt3wVHI+GcTSM34x6ey/a59gGj8BjEIAYPAN7YB8cgQkgXu598D55n33lf/S/+F83Ut9rzzwEf4X/7SdJSOyH</latexit><latexit sha1_base64="4JaLFjl/emTPRdZ2c+tgG1hq0vs=">AAAC8XicdVJdb9MwFHXCx0b56uCRF4sWKZVClfQFNFFpEkLaw4aGRLdJdRs5rtNas5PIdiYq43/BCw8gxCv/hjf+DU4aYGxwJUvH5x5fn+vrtORM6Sj64fnXrt+4ubV9q3P7zt1797s7D45VUUlCJ6TghTxNsaKc5XSimeb0tJQUi5TTk/TsZZ0/OadSsSJ/q9clnQm8zFnGCNaOSna8rX6/gwTWK4K5eWUTcxAe2gCdY1mu2ADujiHKJCYmtubg8LVFqhKJ4aEI2RjGdl7LQ0enbIneo0WhTVMszcw7axM2N4EY2EAnfPD0VyKzSVs+gH/EG2XCGu1gU28+Cp27fh+tsEZO35gLf7vdt3Z33OykMFguLRIsT0xbHLH8ovL/PaJw6G5Jur1oGDUBr4K4BT3QxlHS/e7aJZWguSYcKzWNo1LPnA/NCKe2gypFS0zO8JJOHcyxoGpmmolZ+MQxC5gV0q1cw4a9eMJgodRapE5Z+1aXczX5r9y00tnzmWF5WWmak81FWcWhLmA9frhgkhLN1w5gIpnzCskKuwFr90nqR4gvt3wVHI+GcTSM34x6ey/a59gGj8BjEIAYPAN7YB8cgQkgXu598D55n33lf/S/+F83Ut9rzzwEf4X/7SdJSOyH</latexit>
We shall assume that the unknown interaction kernel � is in the admissible classKR,S := {' 2 C1(R+) : supp' ⇢ [0, R], supr2[0,R] |'(r)|+ |'0(r)| S}.Coercivity condition: 8' : '(·)· 2 H, for cL > 0
cL,N,Hk'(·) · k2L2(⇢LT )
1
NL
L,NX
l,i=1
E�� 1
N
NX
i0=1
'(rii0(tl))rii0(tl)��2 .
<latexit sha1_base64="or0mwev/bTns1AG/SLwleDWpasM=">AAAEQHicbVPLbhMxFJ0mPEp4tbBkc0uDmtBRlMkGVFFUqUKqRFSVPpHqZORxnMSKxzPYnqLI8aex4RPYsWbDAoTYssIzSUNp64V1fXzOte+xb5RypnSz+XWhVL5x89btxTuVu/fuP3i4tPzoWCWZJPSIJDyR7yOsKGeCHmmmOX2fSorjiNOTaLSd75+cUalYIg71OKWdGA8E6zOCtYPC5dIxEgkTPSo0nFBQQ8w5YKWymIIeYu 0mCpkYieSjACY0lZjkShhRKSiHKkqHrApMuc2Ci3sxU4q584Fwl8gxYqyHBHPz1oZm3z+wG7AJyKAzLJ0WkBNud4NaQYsis2/D9foGAIICkbFRWZpamPNVFimqAU6b/n7Hz9dpaKRLUwAWJjNmTdYnsA6Tc+WaA/IVpx/gAJCtNiqVf8UbFPXNdkIlYWdMj4EkosfySq27bxX1E+mcmWVC/gbyz09BpJfoejEXtczL3bFVH5wOqiRsv25WKyiiAyYM5mwgntsKAAlN29/1LygsmlyTF00csduqITlMwsNuu267LbSCVmBajAv77llMYM1u2zo/4tBwn20Gtpvnt+fOvnEmRmyAnAdz/ozO1jYhp+9agLl9DmZrtqZDXq9Pc/SNtBfQWTp3Gb9RAURF77w4CJdWm41mMeBqEMyCVW829sKlL6iXEPfthC7+zWnQTHXHYKkZ4dRWUKZoiskID+ipCwWOqeqYogEsPHNIr/C6n7i3LNCLCoNjpcZx5Jh5HeryXg5et3ea6f7LjmEizTQVZHpQP+OgE8i7CXpMUqL52AWYSPdfCJAhznvE9VzFmRBcLvlqcNxqBM1G8K61uvVqZsei98R76tW8wHvhbXk73p535JHSp9K30o/Sz/Ln8vfyr/LvKbW0MNM89v4b5T9/Aeo0Y+U=</latexit><latexit sha1_base64="or0mwev/bTns1AG/SLwleDWpasM=">AAAEQHicbVPLbhMxFJ0mPEp4tbBkc0uDmtBRlMkGVFFUqUKqRFSVPpHqZORxnMSKxzPYnqLI8aex4RPYsWbDAoTYssIzSUNp64V1fXzOte+xb5RypnSz+XWhVL5x89btxTuVu/fuP3i4tPzoWCWZJPSIJDyR7yOsKGeCHmmmOX2fSorjiNOTaLSd75+cUalYIg71OKWdGA8E6zOCtYPC5dIxEgkTPSo0nFBQQ8w5YKWymIIeYu 0mCpkYieSjACY0lZjkShhRKSiHKkqHrApMuc2Ci3sxU4q584Fwl8gxYqyHBHPz1oZm3z+wG7AJyKAzLJ0WkBNud4NaQYsis2/D9foGAIICkbFRWZpamPNVFimqAU6b/n7Hz9dpaKRLUwAWJjNmTdYnsA6Tc+WaA/IVpx/gAJCtNiqVf8UbFPXNdkIlYWdMj4EkosfySq27bxX1E+mcmWVC/gbyz09BpJfoejEXtczL3bFVH5wOqiRsv25WKyiiAyYM5mwgntsKAAlN29/1LygsmlyTF00csduqITlMwsNuu267LbSCVmBajAv77llMYM1u2zo/4tBwn20Gtpvnt+fOvnEmRmyAnAdz/ozO1jYhp+9agLl9DmZrtqZDXq9Pc/SNtBfQWTp3Gb9RAURF77w4CJdWm41mMeBqEMyCVW829sKlL6iXEPfthC7+zWnQTHXHYKkZ4dRWUKZoiskID+ipCwWOqeqYogEsPHNIr/C6n7i3LNCLCoNjpcZx5Jh5HeryXg5et3ea6f7LjmEizTQVZHpQP+OgE8i7CXpMUqL52AWYSPdfCJAhznvE9VzFmRBcLvlqcNxqBM1G8K61uvVqZsei98R76tW8wHvhbXk73p535JHSp9K30o/Sz/Ln8vfyr/LvKbW0MNM89v4b5T9/Aeo0Y+U=</latexit><latexit sha1_base64="or0mwev/bTns1AG/SLwleDWpasM=">AAAEQHicbVPLbhMxFJ0mPEp4tbBkc0uDmtBRlMkGVFFUqUKqRFSVPpHqZORxnMSKxzPYnqLI8aex4RPYsWbDAoTYssIzSUNp64V1fXzOte+xb5RypnSz+XWhVL5x89btxTuVu/fuP3i4tPzoWCWZJPSIJDyR7yOsKGeCHmmmOX2fSorjiNOTaLSd75+cUalYIg71OKWdGA8E6zOCtYPC5dIxEgkTPSo0nFBQQ8w5YKWymIIeYu 0mCpkYieSjACY0lZjkShhRKSiHKkqHrApMuc2Ci3sxU4q584Fwl8gxYqyHBHPz1oZm3z+wG7AJyKAzLJ0WkBNud4NaQYsis2/D9foGAIICkbFRWZpamPNVFimqAU6b/n7Hz9dpaKRLUwAWJjNmTdYnsA6Tc+WaA/IVpx/gAJCtNiqVf8UbFPXNdkIlYWdMj4EkosfySq27bxX1E+mcmWVC/gbyz09BpJfoejEXtczL3bFVH5wOqiRsv25WKyiiAyYM5mwgntsKAAlN29/1LygsmlyTF00csduqITlMwsNuu267LbSCVmBajAv77llMYM1u2zo/4tBwn20Gtpvnt+fOvnEmRmyAnAdz/ozO1jYhp+9agLl9DmZrtqZDXq9Pc/SNtBfQWTp3Gb9RAURF77w4CJdWm41mMeBqEMyCVW829sKlL6iXEPfthC7+zWnQTHXHYKkZ4dRWUKZoiskID+ipCwWOqeqYogEsPHNIr/C6n7i3LNCLCoNjpcZx5Jh5HeryXg5et3ea6f7LjmEizTQVZHpQP+OgE8i7CXpMUqL52AWYSPdfCJAhznvE9VzFmRBcLvlqcNxqBM1G8K61uvVqZsei98R76tW8wHvhbXk73p535JHSp9K30o/Sz/Ln8vfyr/LvKbW0MNM89v4b5T9/Aeo0Y+U=</latexit><latexit sha1_base64="or0mwev/bTns1AG/SLwleDWpasM=">AAAEQHicbVPLbhMxFJ0mPEp4tbBkc0uDmtBRlMkGVFFUqUKqRFSVPpHqZORxnMSKxzPYnqLI8aex4RPYsWbDAoTYssIzSUNp64V1fXzOte+xb5RypnSz+XWhVL5x89btxTuVu/fuP3i4tPzoWCWZJPSIJDyR7yOsKGeCHmmmOX2fSorjiNOTaLSd75+cUalYIg71OKWdGA8E6zOCtYPC5dIxEgkTPSo0nFBQQ8w5YKWymIIeYu 0mCpkYieSjACY0lZjkShhRKSiHKkqHrApMuc2Ci3sxU4q584Fwl8gxYqyHBHPz1oZm3z+wG7AJyKAzLJ0WkBNud4NaQYsis2/D9foGAIICkbFRWZpamPNVFimqAU6b/n7Hz9dpaKRLUwAWJjNmTdYnsA6Tc+WaA/IVpx/gAJCtNiqVf8UbFPXNdkIlYWdMj4EkosfySq27bxX1E+mcmWVC/gbyz09BpJfoejEXtczL3bFVH5wOqiRsv25WKyiiAyYM5mwgntsKAAlN29/1LygsmlyTF00csduqITlMwsNuu267LbSCVmBajAv77llMYM1u2zo/4tBwn20Gtpvnt+fOvnEmRmyAnAdz/ozO1jYhp+9agLl9DmZrtqZDXq9Pc/SNtBfQWTp3Gb9RAURF77w4CJdWm41mMeBqEMyCVW829sKlL6iXEPfthC7+zWnQTHXHYKkZ4dRWUKZoiskID+ipCwWOqeqYogEsPHNIr/C6n7i3LNCLCoNjpcZx5Jh5HeryXg5et3ea6f7LjmEizTQVZHpQP+OgE8i7CXpMUqL52AWYSPdfCJAhznvE9VzFmRBcLvlqcNxqBM1G8K61uvVqZsei98R76tW8wHvhbXk73p535JHSp9K30o/Sz/Ln8vfyr/LvKbW0MNM89v4b5T9/Aeo0Y+U=</latexit>
The coercivity constant cL,N,H also controls the condition number of the least
squares problem yielding �L,M,H.<latexit sha1_base64="9t2lcdmg2nvf/j27x+woAUgq4L0=">AAACh3icbVFNb9QwEHVCoe3ytcCRi8UuEkLVkpSq9MChqJceABWp21barFYTZ7Kx6tipPakURftX+FHc+Dd10j3QlpEsPb2Z8Zt5k1ZKOoqiv0H4aOPxk82t7cHTZ89fvBy+en3mTG0FToVRxl6k4FBJjVOSpPCisghlqvA8vTzq8ufXaJ00+pSaCuclLLXMpQDy1GL4O9FG6gw18dMCuTBohbyW1HioHYHnx2LRft/5uZOUQI UA1R6vVmMOypmuhqxRjlPfqzPZ/cp1XaZoucl7XiE44u6qBouOV9b42UreSFSZ1Es+TgqgpCpkp/LjrspkMRxFk6gP/hDEazBi6zhZDP8kmRF16RcSCpybxVFF8xYsSaFwNUhqhxWIS1jizEMNJbp52/u44u89k/HcWP/84j37b0cLpXNNmfrKbkp3P9eR/8vNasoP5q3UVU2oxa1QXitOhndH4Zm0KEg1HoCw3kTBRQEWBPnTDbwJ8f2VH4Kz3UkcTeJfu6PDr2s7tthb9o59YDH7wg7ZMTthUyaCjeBj8DnYC7fDT+F+eHBbGgbrnjfsToTfbgBBl8Rg</latexit><latexit sha1_base64="9t2lcdmg2nvf/j27x+woAUgq4L0=">AAACh3icbVFNb9QwEHVCoe3ytcCRi8UuEkLVkpSq9MChqJceABWp21barFYTZ7Kx6tipPakURftX+FHc+Dd10j3QlpEsPb2Z8Zt5k1ZKOoqiv0H4aOPxk82t7cHTZ89fvBy+en3mTG0FToVRxl6k4FBJjVOSpPCisghlqvA8vTzq8ufXaJ00+pSaCuclLLXMpQDy1GL4O9FG6gw18dMCuTBohbyW1HioHYHnx2LRft/5uZOUQI UA1R6vVmMOypmuhqxRjlPfqzPZ/cp1XaZoucl7XiE44u6qBouOV9b42UreSFSZ1Es+TgqgpCpkp/LjrspkMRxFk6gP/hDEazBi6zhZDP8kmRF16RcSCpybxVFF8xYsSaFwNUhqhxWIS1jizEMNJbp52/u44u89k/HcWP/84j37b0cLpXNNmfrKbkp3P9eR/8vNasoP5q3UVU2oxa1QXitOhndH4Zm0KEg1HoCw3kTBRQEWBPnTDbwJ8f2VH4Kz3UkcTeJfu6PDr2s7tthb9o59YDH7wg7ZMTthUyaCjeBj8DnYC7fDT+F+eHBbGgbrnjfsToTfbgBBl8Rg</latexit><latexit sha1_base64="9t2lcdmg2nvf/j27x+woAUgq4L0=">AAACh3icbVFNb9QwEHVCoe3ytcCRi8UuEkLVkpSq9MChqJceABWp21barFYTZ7Kx6tipPakURftX+FHc+Dd10j3QlpEsPb2Z8Zt5k1ZKOoqiv0H4aOPxk82t7cHTZ89fvBy+en3mTG0FToVRxl6k4FBJjVOSpPCisghlqvA8vTzq8ufXaJ00+pSaCuclLLXMpQDy1GL4O9FG6gw18dMCuTBohbyW1HioHYHnx2LRft/5uZOUQI UA1R6vVmMOypmuhqxRjlPfqzPZ/cp1XaZoucl7XiE44u6qBouOV9b42UreSFSZ1Es+TgqgpCpkp/LjrspkMRxFk6gP/hDEazBi6zhZDP8kmRF16RcSCpybxVFF8xYsSaFwNUhqhxWIS1jizEMNJbp52/u44u89k/HcWP/84j37b0cLpXNNmfrKbkp3P9eR/8vNasoP5q3UVU2oxa1QXitOhndH4Zm0KEg1HoCw3kTBRQEWBPnTDbwJ8f2VH4Kz3UkcTeJfu6PDr2s7tthb9o59YDH7wg7ZMTthUyaCjeBj8DnYC7fDT+F+eHBbGgbrnjfsToTfbgBBl8Rg</latexit><latexit sha1_base64="9t2lcdmg2nvf/j27x+woAUgq4L0=">AAACh3icbVFNb9QwEHVCoe3ytcCRi8UuEkLVkpSq9MChqJceABWp21barFYTZ7Kx6tipPakURftX+FHc+Dd10j3QlpEsPb2Z8Zt5k1ZKOoqiv0H4aOPxk82t7cHTZ89fvBy+en3mTG0FToVRxl6k4FBJjVOSpPCisghlqvA8vTzq8ufXaJ00+pSaCuclLLXMpQDy1GL4O9FG6gw18dMCuTBohbyW1HioHYHnx2LRft/5uZOUQI UA1R6vVmMOypmuhqxRjlPfqzPZ/cp1XaZoucl7XiE44u6qBouOV9b42UreSFSZ1Es+TgqgpCpkp/LjrspkMRxFk6gP/hDEazBi6zhZDP8kmRF16RcSCpybxVFF8xYsSaFwNUhqhxWIS1jizEMNJbp52/u44u89k/HcWP/84j37b0cLpXNNmfrKbkp3P9eR/8vNasoP5q3UVU2oxa1QXitOhndH4Zm0KEg1HoCw3kTBRQEWBPnTDbwJ8f2VH4Kz3UkcTeJfu6PDr2s7tthb9o59YDH7wg7ZMTthUyaCjeBj8DnYC7fDT+F+eHBbGgbrnjfsToTfbgBBl8Rg</latexit>

Bias/variance trade-offEL,M (') :=
1
LMN
L,M,NX
l,m,i=1
��x(m)i (tl)� f'(x
(m)i (tl))
��2,
�L,M,H := arg min'2H
EL,M (') .<latexit sha1_base64="4JaLFjl/emTPRdZ2c+tgG1hq0vs=">AAAC8XicdVJdb9MwFHXCx0b56uCRF4sWKZVClfQFNFFpEkLaw4aGRLdJdRs5rtNas5PIdiYq43/BCw8gxCv/hjf+DU4aYGxwJUvH5x5fn+vrtORM6Sj64fnXrt+4ubV9q3P7zt1797s7D45VUUlCJ6TghTxNsaKc5XSimeb0tJQUi5TTk/TsZZ0/OadSsSJ/q9clnQm8zFnGCNaOSna8rX6/gwTWK4K5eWUTcxAe2gCdY1mu2ADujiHKJCYmtubg8LVFqhKJ4aEI2RjGdl7LQ0enbIneo0WhTVMszcw7axM2N4EY2EAnfPD0VyKzSVs+gH/EG2XCGu1gU28+Cp27fh+tsEZO35gLf7vdt3Z33OykMFguLRIsT0xbHLH8ovL/PaJw6G5Jur1oGDUBr4K4BT3QxlHS/e7aJZWguSYcKzWNo1LPnA/NCKe2gypFS0zO8JJOHcyxoGpmmolZ+MQxC5gV0q1cw4a9eMJgodRapE5Z+1aXczX5r9y00tnzmWF5WWmak81FWcWhLmA9frhgkhLN1w5gIpnzCskKuwFr90nqR4gvt3wVHI+GcTSM34x6ey/a59gGj8BjEIAYPAN7YB8cgQkgXu598D55n33lf/S/+F83Ut9rzzwEf4X/7SdJSOyH</latexit><latexit sha1_base64="4JaLFjl/emTPRdZ2c+tgG1hq0vs=">AAAC8XicdVJdb9MwFHXCx0b56uCRF4sWKZVClfQFNFFpEkLaw4aGRLdJdRs5rtNas5PIdiYq43/BCw8gxCv/hjf+DU4aYGxwJUvH5x5fn+vrtORM6Sj64fnXrt+4ubV9q3P7zt1797s7D45VUUlCJ6TghTxNsaKc5XSimeb0tJQUi5TTk/TsZZ0/OadSsSJ/q9clnQm8zFnGCNaOSna8rX6/gwTWK4K5eWUTcxAe2gCdY1mu2ADujiHKJCYmtubg8LVFqhKJ4aEI2RjGdl7LQ0enbIneo0WhTVMszcw7axM2N4EY2EAnfPD0VyKzSVs+gH/EG2XCGu1gU28+Cp27fh+tsEZO35gLf7vdt3Z33OykMFguLRIsT0xbHLH8ovL/PaJw6G5Jur1oGDUBr4K4BT3QxlHS/e7aJZWguSYcKzWNo1LPnA/NCKe2gypFS0zO8JJOHcyxoGpmmolZ+MQxC5gV0q1cw4a9eMJgodRapE5Z+1aXczX5r9y00tnzmWF5WWmak81FWcWhLmA9frhgkhLN1w5gIpnzCskKuwFr90nqR4gvt3wVHI+GcTSM34x6ey/a59gGj8BjEIAYPAN7YB8cgQkgXu598D55n33lf/S/+F83Ut9rzzwEf4X/7SdJSOyH</latexit><latexit sha1_base64="4JaLFjl/emTPRdZ2c+tgG1hq0vs=">AAAC8XicdVJdb9MwFHXCx0b56uCRF4sWKZVClfQFNFFpEkLaw4aGRLdJdRs5rtNas5PIdiYq43/BCw8gxCv/hjf+DU4aYGxwJUvH5x5fn+vrtORM6Sj64fnXrt+4ubV9q3P7zt1797s7D45VUUlCJ6TghTxNsaKc5XSimeb0tJQUi5TTk/TsZZ0/OadSsSJ/q9clnQm8zFnGCNaOSna8rX6/gwTWK4K5eWUTcxAe2gCdY1mu2ADujiHKJCYmtubg8LVFqhKJ4aEI2RjGdl7LQ0enbIneo0WhTVMszcw7axM2N4EY2EAnfPD0VyKzSVs+gH/EG2XCGu1gU28+Cp27fh+tsEZO35gLf7vdt3Z33OykMFguLRIsT0xbHLH8ovL/PaJw6G5Jur1oGDUBr4K4BT3QxlHS/e7aJZWguSYcKzWNo1LPnA/NCKe2gypFS0zO8JJOHcyxoGpmmolZ+MQxC5gV0q1cw4a9eMJgodRapE5Z+1aXczX5r9y00tnzmWF5WWmak81FWcWhLmA9frhgkhLN1w5gIpnzCskKuwFr90nqR4gvt3wVHI+GcTSM34x6ey/a59gGj8BjEIAYPAN7YB8cgQkgXu598D55n33lf/S/+F83Ut9rzzwEf4X/7SdJSOyH</latexit><latexit sha1_base64="4JaLFjl/emTPRdZ2c+tgG1hq0vs=">AAAC8XicdVJdb9MwFHXCx0b56uCRF4sWKZVClfQFNFFpEkLaw4aGRLdJdRs5rtNas5PIdiYq43/BCw8gxCv/hjf+DU4aYGxwJUvH5x5fn+vrtORM6Sj64fnXrt+4ubV9q3P7zt1797s7D45VUUlCJ6TghTxNsaKc5XSimeb0tJQUi5TTk/TsZZ0/OadSsSJ/q9clnQm8zFnGCNaOSna8rX6/gwTWK4K5eWUTcxAe2gCdY1mu2ADujiHKJCYmtubg8LVFqhKJ4aEI2RjGdl7LQ0enbIneo0WhTVMszcw7axM2N4EY2EAnfPD0VyKzSVs+gH/EG2XCGu1gU28+Cp27fh+tsEZO35gLf7vdt3Z33OykMFguLRIsT0xbHLH8ovL/PaJw6G5Jur1oGDUBr4K4BT3QxlHS/e7aJZWguSYcKzWNo1LPnA/NCKe2gypFS0zO8JJOHcyxoGpmmolZ+MQxC5gV0q1cw4a9eMJgodRapE5Z+1aXczX5r9y00tnzmWF5WWmak81FWcWhLmA9frhgkhLN1w5gIpnzCskKuwFr90nqR4gvt3wVHI+GcTSM34x6ey/a59gGj8BjEIAYPAN7YB8cgQkgXu598D55n33lf/S/+F83Ut9rzzwEf4X/7SdJSOyH</latexit>
H<latexit sha1_base64="4RtK6QM+0V0Vok7kz4/ND513bWM=">AAAB9HicbVBNTwIxFHyLX4hfqEcvjWDiieziQQ8eSLxwxETABDakW7rQ0HbXtktCNvwOLx40xqs/xpv/xi7sQcFJmkxm3subThBzpo3rfjuFjc2t7Z3ibmlv/+DwqHx80tFRoghtk4hH6jHAmnImadsww+ljrCgWAafdYHKX+d0pVZpF8sHMYuoLPJIsZAQbK/nVvsBmTDBPm/PqoFxxa+4CaJ14OalAjtag/NUfRiQRVBrCsdY9z42Nn2JlGOF0XuonmsaYTPCI9iyVWFDtp4vQc3RhlSEKI2WfNGih/t5IsdB6JgI7mWXUq14m/uf1EhPe+CmTcWKoJMtDYcKRiVDWABoyRYnhM0swUcxmRWSMFSbG9lSyJXirX14nnXrNu6rV7+uVxm1eRxHO4BwuwYNraEATWtAGAk/wDK/w5kydF+fd+ViOFpx85xT+wPn8ATcYkbY=</latexit>
L2(⇢LT )<latexit sha1_base64="f9tdKc5vOeacQn2AYYqkeuWs1kg=">AAAB+HicbVC7TsMwFHV4lvJogJHFokUqS5WEAQaGSiwMHYrUl9SmkeO6rVXHjmwHqUT9EhYGEGLlU9j4G9w2A7Qc6UpH59yre+8JY0aVdpxva2Nza3tnN7eX3z84PCrYxyctJRKJSRMLJmQnRIowyklTU81IJ5YERSEj7XByN/fbj0QqKnhDT2PiR2jE6ZBipI0U2IVSre+Ve3Isgka/dlkK7KJTcRaA68TNSBFkqAf2V28gcBIRrjFDSnVdJ9Z+iqSmmJFZvpcoEiM8QSPSNZSjiCg/XRw+gxdGGcChkKa4hgv190SKIqWmUWg6I6THatWbi/953UQPb/yU8jjRhOPlomHCoBZwngIcUEmwZlNDEJbU3ArxGEmEtckqb0JwV19eJy2v4l5VvAevWL3N4siBM3AOysAF16AK7kEdNAEGCXgGr+DNerJerHfrY9m6YWUzp+APrM8fkDWRtA==</latexit>
�<latexit sha1_base64="YH8YoR1OUrOE79cnNfk06KX7kK0=">AAAB7XicbVA9SwNBEJ3zM8avqKXNYiJYhbtYaGERsLGMYD4gOcLeZi9Zs7e77O4J4ch/sLFQxNb/Y+e/cZNcoYkPBh7vzTAzL1KcGev7397a+sbm1nZhp7i7t39wWDo6bhmZakKbRHKpOxE2lDNBm5ZZTjtKU5xEnLaj8e3Mbz9RbZgUD3aiaJjgoWAxI9g6qVXpqRGr9Etlv+rPgVZJkJMy5Gj0S1+9gSRpQoUlHBvTDXxlwwxrywin02IvNVRhMsZD2nVU4ISaMJtfO0XnThmgWGpXwqK5+nsiw4kxkyRynQm2I7PszcT/vG5q4+swY0KllgqyWBSnHFmJZq+jAdOUWD5xBBPN3K2IjLDGxLqAii6EYPnlVdKqVYPLau2+Vq7f5HEU4BTO4AICuII63EEDmkDgEZ7hFd486b14797HonXNy2dO4A+8zx/Lr46X</latexit>
�<latexit sha1_base64="PzcUNFOPDX6T1JidKB7SftwmObQ=">AAAB8XicbVBNS8NAEJ3Ur1q/qh69BFvBU0nqQQ8eCl48VrCt2ISy2W6apZtN2J0IJfRfePGgiFf/jTf/jds2B219MPB4b4aZeUEquEbH+bZKa+sbm1vl7crO7t7+QfXwqKuTTFHWoYlI1ENANBNcsg5yFOwhVYzEgWC9YHwz83tPTGmeyHucpMyPyUjykFOCRnqsexFBL414fVCtOQ1nDnuVuAWpQYH2oPrlDROaxUwiFUTrvuuk6OdEIaeCTStepllK6JiMWN9QSWKm/Xx+8dQ+M8rQDhNlSqI9V39P5CTWehIHpjMmGOllbyb+5/UzDK/8nMs0QybpYlGYCRsTe/a+PeSKURQTQwhV3Nxq04goQtGEVDEhuMsvr5Jus+FeNJp3zVrruoijDCdwCufgwiW04Bba0AEKEp7hFd4sbb1Y79bHorVkFTPH8AfW5w/WVpBY</latexit>
bias
variancePH�
<latexit sha1_base64="Zx88y8ijpLOLyNSqbRDdHW5pPOA=">AAAB/nicbVDLSsNAFL3xWesrKq7cBFvBVUnqQhcuCm66rGAf0IQwmU7aoZNJmJkIJQT8FTcuFHHrd7jzb5y0WWjrgYHDOfdyz5wgYVQq2/421tY3Nre2KzvV3b39g0Pz6Lgn41Rg0sUxi8UgQJIwyklXUcXIIBEERQEj/WB6V/j9RyIkjfmDmiXEi9CY05BipLTkm6f1jp+5EVITjFjWznM3mdC6b9bshj2HtUqcktSgRMc3v9xRjNOIcIUZknLo2InyMiQUxYzkVTeVJEF4isZkqClHEZFeNo+fWxdaGVlhLPTjypqrvzcyFEk5iwI9WQSVy14h/ucNUxXeeBnlSaoIx4tDYcosFVtFF9aICoIVm2mCsKA6q4UnSCCsdGNVXYKz/OVV0ms2nKtG875Za92WdVTgDM7hEhy4hha0oQNdwJDBM7zCm/FkvBjvxsdidM0od07gD4zPH/2qlXs=</latexit>
bias
variance
Pick dimH an increasing function of M ,to attain the minimum of the sum ofbias (squared) and variance.
<latexit sha1_base64="w0wh09Hgj9PNrelbp/KwTKEEISg=">AAACjXicbVHbattAEF2pt1S9xG0f+7LULqQQjORQ0oRQAn1oXgou1EnAa8xotbIH766UvQSM8N/ki/LWv+nKNjRNOrBw5nZm9kxeS7QuTX9H8aPHT54+23mevHj56vVu583bc1t5w8WIV7IylzlYIVGLkUMnxWVtBKhciot88a3NX1wLY7HSv9yyFhMFM40lcnAhNO3cMF2hLoR2dIh8QXtMgZsb1RSoVmx/7XGQzdmqR0FT1DywW9QzWnrNWw5albT3o7fPGE3+krmKgnOAmrq5oAo1Kq/a0ta1G8jYnYYcwdI9e+XBiOJTmFXQazAImov+tNNN++na6EOQbUGXbG047dyyouJeBWIuwdpxltZu0oBxyKVYJcxbUQNfwEyMA9SghJ00azVX9GOIFLSsTHhhsXX0bkcDytqlykNlq469n2uD/8uNvSu/TBrUtXdC882g0stWq/Y0tEAjuJPLAIAbDLtSPgcD3IUDJkGE7P6XH4LzQT876A9+DrqnJ1s5dsh78oHskYwcklNyRoZkRHiURGl0FB3Hu/Hn+CT+uimNo23PO/KPxd//ABRqxK8=</latexit>
+ coercivity<latexit sha1_base64="9hKYDy/1zGXwaFmAIsRz73NCQI8=">AAAB83icbVA9SwNBEJ2LXzF+RS1tFoMgCOEuFlpYBGwsI5gPSI6wt5lLluztHbt7gSPkb9hYKGLrn7Hz37hJrtDEBwOP92aYmRckgmvjut9OYWNza3unuFva2z84PCofn7R0nCqGTRaLWHUCqlFwiU3DjcBOopBGgcB2ML6f++0JKs1j+WSyBP2IDiUPOaPGSr0rwmJUjE+4yfrlilt1FyDrxMtJBXI0+uWv3iBmaYTSMEG17npuYvwpVYYzgbNSL9WYUDamQ+xaKmmE2p8ubp6RC6sMSBgrW9KQhfp7YkojrbMosJ0RNSO96s3F/7xuasJbf8plkhqUbLkoTAUxMZkHQAZcITMis4Qyxe2thI2ooszYmEo2BG/15XXSqlW962rtsVap3+VxFOEMzuESPLiBOjxAA5rAIIFneIU3J3VenHfnY9lacPKZU/gD5/MHv9GReg==</latexit>
Unlike regression, we do not have access to values of �, but only observationsthat are linear functions of �; coercivity allows us to invert in a stable fashion.
<latexit sha1_base64="mTBTTiCZctjAcDyUZ+Q/A/rD3Ng=">AAACn3icbVFNb9NAEF2brxI+msIRDgMpEocqssMBpHKo4AASCAWJtEVJFI3X43iV9a61H66iqH+LH8KNf8PaiRC0zGVH783bmXmT1VJYlyS/ovjGzVu37+zd7d27/+Dhfv/g0anV3nCacC21Oc/QkhSKJk44See1IawySWfZ6n3LnzVkrNDqm1vXNK9wqUQhOLoALfo/ZkoLlZNyMFFSrAgMLQ3ZVnAEFwS5BqUdlNgQIOeBAa ehQenJgi7gcFaX4vAIMu9AK7kGnVkyTfd9KC3RARqCdj40UHjFt8wf6TFwTYaLRrg1oJT6woLvmggVJnfhAQTrMKwEBdoyyIeL/iAZJl3A9STdJQO2i/Gi/3OWa+6rsCiXaO00TWo336Bxgku67M28pRr5Cpc0DanCiux80/l7CS8CkkOhw/w6GNWhfys2WFm7rrJQWaEr7VWuBf/HTb0r3sw3QtXekeLbRoWX7fLtsSAXhrgLpuYCuRFhVuAlGuQunLQXTEivrnw9OR0N01fD0dfR4OTtzo499oQ9Zy9Zyl6zE/aRjdmE8ehp9C76FH2On8Uf4i/xeFsaRzvNY/ZPxN9/A31PzMg=</latexit>
decreases as dimH increases; depends only onapproximation properties of H
<latexit sha1_base64="B7nOwL5uGOtRZCc032SSun24waQ=">AAACbXicbVFLaxRBEO4ZH4nra1Q8+EAaNxIPYZlZDwp6CHjJMYKbBHaWpaanJmnSL7p7xGXYm7/Qm3/Bi3/B2smAmljQw9dV9X1V/U3llAwxz38k6bXrN25ubd8a3b5z99797MHDo2BbL3AmrLL+pIKAShqcRRkVnjiPoCuFx9X5x039+Av6IK35HFcOFxpOjWykgEipZfatNFaaGk3kNQpiBgwcAt8pNcQzr7ta6nW5198EqO5gvcOlGRrfE8ehqQO3Rq3ow8ty9EcQnPP2q9T9KE7YoY+S9G0z6A+Ky2ycT/I++FVQDGDMhjhcZt/L2opW0xShIIR5kbu46IDkhcL1qGwDOhDncIpzggY0hkXXu7XmryhT88Z6OrRln/2b0YEOYaUr6tzsGC7XNsn/1eZtbN4tOmlcG9GIi0FNq3i0fGM9r6VHEcmoWoLwknbl4gw8iEg/aEQmFJeffBUcTSfFm8n003S8/2GwY5s9Yy/Za1awt2yfHbBDNmOC/Uyy5EnyNPmVPk6fpy8uWtNk4Dxi/0S6+xuptLxT</latexit>
increases as dimH increases, for fixed M ;measures randomnesso of � 2 H
<latexit sha1_base64="Kad7QFTW0WpDPmGDdbAiXo/5sD4=">AAACcnicbVFNTxsxEPUubaGhlEDVSyu1hqQShyjaDQeQ6AGpFy6VqNQAUhxFs95ZYuGPle1FRKv8AP4et/6KXvoD6oSVoNA5Pb+ZeX5+zkopnE+SX1G88uLlq9W11631NxtvN9tb22fOVJbjkBtp7EUGDqXQOPTCS7woLYLKJJ5nV98W/fNrtE4Y/dPPShwruNSiEBx8oCbtW6aN0DlqT4XmYdOho+BolynwU6vqXKg56y1PHGR9Mu8+DPZoYSwtxA3mtPu9e8RY60FOhZHKBjULOjdKo3OGmiIoT8GzciqY0I9lJ+1O0k+WRZ+DtAEd0tTppH3HcsMrFS7jEpwbpUnpxzVYL7jEeYtVDkvgV3CJowA1KHTjehnZnH4JTH5v3wSzS/bxRg3KuZnKwuTCo3vaW5D/640qXxyOa6HLyqPm9xcVlaTe0EX+NBcWuZezAIBbEbxSPgUL3IdfaoUQ0qdPfg7OBv10vz/4Megcf23iWCMfyS7ZIyk5IMfkhJySIeHkd/Q++hR9jv7EH+KduMkujpqdd+Sfint/AeZBvag=</latexit>
KR,S<latexit sha1_base64="tMBdQYp4cZvwmCxE4Yurxt89nyo=">AAAB/HicbVC7TsMwFHXKq5RXoCOLRYvEgKqkDDAwVGJBYimPPqQ2ihzXaa06TmQ7SFEUfoWFAYRY+RA2/ganzQAtR7J0dM69usfHixiVyrK+jdLK6tr6RnmzsrW9s7tn7h90ZRgLTDo4ZKHoe0gSRjnpKKoY6UeCoMBjpOdNr3K/90iEpCF/UElEnACNOfUpRkpLrlmtDwOkJhix9CZz07vT+6zumjWrYc0Al4ldkBoo0HbNr+EoxHFAuMIMSTmwrUg5KRKKYkayyjCWJEJ4isZkoClHAZFOOgufwWOtjKAfCv24gjP190aKAimTwNOTeVK56OXif94gVv6Fk1IexYpwPD/kxwyqEOZNwBEVBCuWaIKwoDorxBMkEFa6r4ouwV788jLpNhv2WaN526y1Los6yuAQHIETYINz0ALXoA06AIMEPINX8GY8GS/Gu/ExHy0ZxU4V/IHx+QP5+5RO</latexit>

Main TheoremTheorem. Let {Hn}n ✓ H be a sequence of subspaces of L1
[0, R], with
dim(Hn) c0n and inf'2Hn k'(·)� �(·)kL1([0,R]) c1n�s, for some constants
c0, c1, s > 0. It exists, for example, if � is s-Holder regular.
Choose n⇤ = (M/logM)1
2s+1 : then for some C = C(c0, c1, R, S)
E[kb�L,M,Hn⇤ (·) ·��(·) · kL2(⇢TL)]
C
cL,N,H
✓logM
M
◆ s2s+1
.<latexit sha1_base64="mSD9IRDIH6WlwO8G8A1ZVPGe2jA=">AAAEjXicbVNtb9s2EFZjb+u0l6bbx305NBpgd4onp1i7Fm1RwBiWAcnQdUlbwHQEijpZRCXSIam2AcNfs3+0b/s3Iy0nTdYdIOJ4r8891BWrhmuTZf/c2BoMP/n0s5ufx198+dXXt7Zvf/NSy04xPGaykep1QTU2XOCx4abB1yuFtC0afFW8mQX/q7eoNJfiyJytcNHSpeAVZ9R4U3576y8iJBclCmNJUcFRjVJh6ybxARpIiC UtNTWjjd13uSDh012h0eDpFU8CBQIFjacdCoYgKwhRK8pQh0tycGIJF5U5c/MsfbFIUnjHTQ2+QSiiWlvy1o2u9RoDafAUWJ6BSICKEuIk1MgteUvVqubgb3AtxZHzjW9EWCnNeJd80Ml5bg9OehSjNYqxg4seUxAndlc7D6ySCrRsEZgU2lBhNCQeRBqiUtDwNEsmEP9mAN/759F9Ar6n7arBFLgfNjRNgPs8nezukzuyKVGBwmXXUDWJ40vGYVZLqdHTIPK7T0b20P1oSSOXcOjGnrBKUWanzu7pH6bOJY/A1Cg+4EtmT2ajgGwN7EX65ziJSYFLLixt+FLcdXFPT1HYX9ycnAN5x0usqQkAPRnpYXqVPutBOHfBVjiv0RfOnsO9EVG1zA9OjjyDi57CHuzMWRYK/361sHMhpDKjPmYzoB+WKL6szeWk+mJSkk6AoCgvx8i3d7JJthb4WJlulJ1oI8/z7b9JKVnXeo5ZQ7WeT7OVWViqDGcNuph0Gv3P+YYuce5VQVvUC7veJgffe0u5prmS/o3W1qsZlrZan7WFjwxD6v/6gvH/fPPOVD8vLBerzvgt6RtVXQNGQlhNKLlCZpozr1CmuMcKrKaeGuMXuCfhYZD7lyN/rLzcm0zvTe79sbfz7PGGjpvRd9GdaBRNowfRs2g/eh4dR2wQD7LBw8Gj4a3hT8PHw6d96NaNTc630TUZ/vovbaF2lg==</latexit>
In the end solving the minimization problem is just a least-squares problem in n
dimensions. Algorithms for computing the estimator run in time O(N2Ld ·M),
and we expect to be able to also run them in online fashion.
<latexit sha1_base64="OEIIYdLd7sy3Cj+EEww8fFyGYJo=">AAAC1HicbVLJbhNBEO0ZtmA2A0cuJWykIIFlW5HgwCGIC0gsiYSdSLaJ2j01dpNehq6eBGMigRBXPo4b38BPUDMxAhLq9PrV/qqnhdEUu90fSXrm7LnzF9YuNi5dvnL1WvP6jSH5MigcKG982J1KQqMdDqKOBneLgNJODe5M959U/p0DDKS9ex0XBU6snDmdayUjU3vNn2PntcvQRXjmIM4R0GVA3hxoN6vfVjtt9Yc6Horgub IFTfC2pAgSDEqK9+ldKQPSH7+DtmtDpi26qjd14LGZ+aDj3BLkPoDytijj7yZIUVsZmQ+lq7L5idB+tf7yTf95NlaZj/DibvseSJ7ukOPfF6giRA9TBMktKygN+TqfK9YjeFfJArmkOc/Q2Wu2up1ubXAa9FagJVa2tdf8Ps68KnmHqIwkGvW6RZwsZYhaGTxqjEvCQqp9OcMRQyct0mRZH+UI7jCT1avmntWt2b8zltISLeyUI3nzOZ30VeT/fKMy5g8nS+1YPnTquFFemkqB6sIsemBtzIKBVKy4VqDmMkgV+R80WITeyZVPg2G/09vobGz3W5uPVnKsiVvitlgXPfFAbIqnYksMhEq2k8PkU/I5HaYf0y/p1+PQNFnl3BT/WPrtF7104QY=</latexit>
· The good: Rate in M is optimal, in fact even optimal in the case ofregression, where we would be given (rm,�(rm))Mm=1.
· The bad: no dependency on L. Numerical examples: suggest in somecases that e↵ective sample size is LM = #obs.
<latexit sha1_base64="3Qz5bTB4U5kqjkSmyGR7NzllBds=">AAADKXicbVLbahRBEJ0Zb3G9bfTRl8IdIYGw7AbBEAwGfPEhkSi5wc669PTUzDbpy9Ddk7gu+R1f/BVfFBT11R+xerOKJilm4HCqqvvUqc5rKZzv9X7EyZWr167fWLjZunX7zt177cX7+840luMeN9LYw5w5lELjnhde4mFtkalc4kF+9CLkD47ROmH0rp/UOFSs0qIUnHmiRovx80wboQvUHlpZjpXQU+FRifd42soCGqQZL4xPh7A7RqiMKdbhDfMIQkO6nYJwYGovFJMrgSoZ94DHqP+wgfTUyUklmBIsVhZdELQCJ2O0CCf0mUYWkNP5IrSmS3akVrJ6LAJYXh5N1Ub/9O122r1MU85IkjZQYI1hEj4BQ2dspV141Si0NKwEfMdULdGtg2uqCp0PupxRZ8IcSWSkuyyRe5IAblYNjnwIE6Zb2xtZB1KTO5JAt/w1adTu9Lq9WcBF0J+DTjSPnVH7S1YYTrq055I5N+j3aj+cMusFl8H0xmHN+BGrcEBQM4VuOJ1t+hQeE1NAaSz9tLEZ+2/HlCnnJiqnSsX82J3PBfKy3KDx5dpwKnTdeDLw7KKykeANhGcDhbDkjJwQYNwK0gp8zCwtmx5Xi0zonx/5Ithf7fafdNder3Y2n83tWIgeRo+ipagfPY02o5fRTrQX8fhD/Cn+Gn9LPiafk+/Jz7PSJJ73PIj+i+TXb0pW/hA=</latexit>
We chooseHn to be the space of piecewise linear functions on a uniform partitionof cardinality n of [0, Rmax] (estimated supp.⇢TL), for n = n⇤.
<latexit sha1_base64="zr06k3iws8XABJFrOU0WapJTtOE=">AAACoHicbVFNb9NAEF2brxK+AhwR0qgxUkGVZVdI9ABSpV5yKKJFTVMRB2u9Hjerrnet3TUQWfld/A9u/BvGaQ7QMqenNx9v5k3RKOl8kvwOwlu379y9t3V/8ODho8dPhk+fnTnTWoETYZSx5wV3qKTGiZde4XljkdeFwmlxedjnp9/QOmn0qV82OK/5hZaVFNwTlQ9/ZtpIXaL2MEUQC2McQpTV3C8EV914lesIvIECwS8QXM MFgqmgkSjwu6TiXplbqFot+pEOjAYOLYkYW0PDLW1FfN8kuC2l5kr6JUQ0l6holux+zjsS/LGaR7CDzksSxxJc2zRxlNmFyY++nkavd4EGUtsHnb+J4nw4SuJkHXATpBswYps4zoe/stKItqZLheLOzdKk8fOuX08oXA2y1iEdd8kvcEZQ8xrdvFsbvIJXxJRr/cqQU2v2746O184t64Iqe+fc9VxP/i83a321P++kblqPWlwJVa3qHe+/BaW0KLxaEuDCkpGCfsQtF55+OiAT0usn3wRne3H6Nt4/2RsdvN/YscVesG22w1L2jh2wMTtmEyaCl8FhcBR8DLfDcfgpPLkqDYNNz3P2T4Rf/gCbK8rN</latexit>

Main Theorem
12 13 14 15 16 17 18 19 20 21log2(M)
-9
-8.5
-8
-7.5
-7
-6.5
-6
-5.5
log 2(e
rror
)
Learning rate errors slope -0.36
Example. The Lennard Jones kernelis not admissible, yet since particles rarelyget very close to each other, we obtain aconvergence rate close to optimal.
<latexit sha1_base64="L7wefGRngeRSo2U1nws1rYphWuk=">AAACvnicbVFLi9RAEO7E1zq+Rj16KRwED0tI9qKghwERRDyssLO7MDMMlU5lpp1+hO7O7oaQPyl48N/YmQ26DwsaPr6qr+qr6rySwvk0/R3Fd+7eu/9g7+Ho0eMnT5+Nn784dqa2nGbcSGNPc3QkhaaZF17SaWUJVS7pJN9+6vMnZ2SdMPrINxUtFa61KAVHH6jV+NdCG6EL0r5d5CV8vkBVSeoSONoQfCOt0Rbw1WhysCWrSY 5GfxUgHLQLUq02vusACyWcE2HyPjTkwQnNCSq0XnAZ9BYtyQauNliHsuCuAS6NI/AGCPkGjN+Q3YdzApN7FBrwmoobHURr6ttb9PRPbSovFMpkNZ6kSboLuA2yAUzYEIer8c9FYXitQnsu0bl5llZ+2Q7eu9GidlQh3+Ka5gFqVOSW7e78HbwJTAGlseHt7AX2qqJF5Vyj8lCp0G/czVxP/i83r335ftkKXdU+LHs5qKxlv2n/l1AIS9yHmxYCuRXBK/ANWuQ+/PgoHCG7ufJtcHyQZGmSfT+YTD8O59hjr9hr9pZl7B2bsi/skM0Yjz5EGP2ItvE0LmMVm8vSOBo0L9m1iC/+AFLK2V8=</latexit><latexit sha1_base64="L7wefGRngeRSo2U1nws1rYphWuk=">AAACvnicbVFLi9RAEO7E1zq+Rj16KRwED0tI9qKghwERRDyssLO7MDMMlU5lpp1+hO7O7oaQPyl48N/YmQ26DwsaPr6qr+qr6rySwvk0/R3Fd+7eu/9g7+Ho0eMnT5+Nn784dqa2nGbcSGNPc3QkhaaZF17SaWUJVS7pJN9+6vMnZ2SdMPrINxUtFa61KAVHH6jV+NdCG6EL0r5d5CV8vkBVSeoSONoQfCOt0Rbw1WhysCWrSY 5GfxUgHLQLUq02vusACyWcE2HyPjTkwQnNCSq0XnAZ9BYtyQauNliHsuCuAS6NI/AGCPkGjN+Q3YdzApN7FBrwmoobHURr6ttb9PRPbSovFMpkNZ6kSboLuA2yAUzYEIer8c9FYXitQnsu0bl5llZ+2Q7eu9GidlQh3+Ka5gFqVOSW7e78HbwJTAGlseHt7AX2qqJF5Vyj8lCp0G/czVxP/i83r335ftkKXdU+LHs5qKxlv2n/l1AIS9yHmxYCuRXBK/ANWuQ+/PgoHCG7ufJtcHyQZGmSfT+YTD8O59hjr9hr9pZl7B2bsi/skM0Yjz5EGP2ItvE0LmMVm8vSOBo0L9m1iC/+AFLK2V8=</latexit><latexit sha1_base64="L7wefGRngeRSo2U1nws1rYphWuk=">AAACvnicbVFLi9RAEO7E1zq+Rj16KRwED0tI9qKghwERRDyssLO7MDMMlU5lpp1+hO7O7oaQPyl48N/YmQ26DwsaPr6qr+qr6rySwvk0/R3Fd+7eu/9g7+Ho0eMnT5+Nn784dqa2nGbcSGNPc3QkhaaZF17SaWUJVS7pJN9+6vMnZ2SdMPrINxUtFa61KAVHH6jV+NdCG6EL0r5d5CV8vkBVSeoSONoQfCOt0Rbw1WhysCWrSY 5GfxUgHLQLUq02vusACyWcE2HyPjTkwQnNCSq0XnAZ9BYtyQauNliHsuCuAS6NI/AGCPkGjN+Q3YdzApN7FBrwmoobHURr6ttb9PRPbSovFMpkNZ6kSboLuA2yAUzYEIer8c9FYXitQnsu0bl5llZ+2Q7eu9GidlQh3+Ka5gFqVOSW7e78HbwJTAGlseHt7AX2qqJF5Vyj8lCp0G/czVxP/i83r335ftkKXdU+LHs5qKxlv2n/l1AIS9yHmxYCuRXBK/ANWuQ+/PgoHCG7ufJtcHyQZGmSfT+YTD8O59hjr9hr9pZl7B2bsi/skM0Yjz5EGP2ItvE0LmMVm8vSOBo0L9m1iC/+AFLK2V8=</latexit><latexit sha1_base64="L7wefGRngeRSo2U1nws1rYphWuk=">AAACvnicbVFLi9RAEO7E1zq+Rj16KRwED0tI9qKghwERRDyssLO7MDMMlU5lpp1+hO7O7oaQPyl48N/YmQ26DwsaPr6qr+qr6rySwvk0/R3Fd+7eu/9g7+Ho0eMnT5+Nn784dqa2nGbcSGNPc3QkhaaZF17SaWUJVS7pJN9+6vMnZ2SdMPrINxUtFa61KAVHH6jV+NdCG6EL0r5d5CV8vkBVSeoSONoQfCOt0Rbw1WhysCWrSY 5GfxUgHLQLUq02vusACyWcE2HyPjTkwQnNCSq0XnAZ9BYtyQauNliHsuCuAS6NI/AGCPkGjN+Q3YdzApN7FBrwmoobHURr6ttb9PRPbSovFMpkNZ6kSboLuA2yAUzYEIer8c9FYXitQnsu0bl5llZ+2Q7eu9GidlQh3+Ka5gFqVOSW7e78HbwJTAGlseHt7AX2qqJF5Vyj8lCp0G/czVxP/i83r335ftkKXdU+LHs5qKxlv2n/l1AIS9yHmxYCuRXBK/ANWuQ+/PgoHCG7ufJtcHyQZGmSfT+YTD8O59hjr9hr9pZl7B2bsi/skM0Yjz5EGP2ItvE0LmMVm8vSOBo0L9m1iC/+AFLK2V8=</latexit>
· The good: Rate in M is optimal, in fact even optimal in the case ofregression, where we would be given (rm,�(rm))Mm=1.
· The bad: no dependency on L.<latexit sha1_base64="jU/zB7ammE84ZCg95eBasoSM71Y=">AAAC03icbVJdaxNBFJ1dv2r8ivroy8Ws0EIIu31RSoWCLz5YiNK0hWwMs7N3k6HzsczMpsQlKOKrf843/4K/wpk0ira97MDh3Htnzz13ilpw69L0ZxTfuHnr9p2tu5179x88fNR9/OTY6sYwHDEttDktqEXBFY4cdwJPa4NUFgJPirM3IX+yQGO5VkduWeNE0pniFWfUeWra/ZUrzVWJykEnL3DGVcsdSv4JV508oHGSs1K7ZA JHc4SZ1uUefKAOgStIDhPgFnTtuKSiH6iKMge4QPWHDaTzncyLBF2BwZlBG/T04XyOBuHcf7oRJRT+fh5ak20zlf28nvMAdnamrXydrT4eJoPrNBXUS1IaSqwxTMKWoP0d70K1J/7OM+320kG6DrgKsg3okU0Mp90fealZI705TFBrx1lau0lLjeNMBH8aizVlZ3SGYw8VlWgn7XonK3jhmRIqbfzx5q7ZfztaKq1dysJXSurm9nIukNflxo2rXk1arurG+VkvflQ1ApyGsGAouUHmxNIDygz3WoHNqfF78c+g403ILo98FRzvDrJ0kL3f7R3sb+zYIs/Ic7JNMvKSHJC3ZEhGhEXDaBF9jr7Eo7iNv8bfLkrjaNPzlPwX8fffo8LdqQ==</latexit><latexit sha1_base64="jU/zB7ammE84ZCg95eBasoSM71Y=">AAAC03icbVJdaxNBFJ1dv2r8ivroy8Ws0EIIu31RSoWCLz5YiNK0hWwMs7N3k6HzsczMpsQlKOKrf843/4K/wpk0ira97MDh3Htnzz13ilpw69L0ZxTfuHnr9p2tu5179x88fNR9/OTY6sYwHDEttDktqEXBFY4cdwJPa4NUFgJPirM3IX+yQGO5VkduWeNE0pniFWfUeWra/ZUrzVWJykEnL3DGVcsdSv4JV508oHGSs1K7ZA JHc4SZ1uUefKAOgStIDhPgFnTtuKSiH6iKMge4QPWHDaTzncyLBF2BwZlBG/T04XyOBuHcf7oRJRT+fh5ak20zlf28nvMAdnamrXydrT4eJoPrNBXUS1IaSqwxTMKWoP0d70K1J/7OM+320kG6DrgKsg3okU0Mp90fealZI705TFBrx1lau0lLjeNMBH8aizVlZ3SGYw8VlWgn7XonK3jhmRIqbfzx5q7ZfztaKq1dysJXSurm9nIukNflxo2rXk1arurG+VkvflQ1ApyGsGAouUHmxNIDygz3WoHNqfF78c+g403ILo98FRzvDrJ0kL3f7R3sb+zYIs/Ic7JNMvKSHJC3ZEhGhEXDaBF9jr7Eo7iNv8bfLkrjaNPzlPwX8fffo8LdqQ==</latexit><latexit sha1_base64="jU/zB7ammE84ZCg95eBasoSM71Y=">AAAC03icbVJdaxNBFJ1dv2r8ivroy8Ws0EIIu31RSoWCLz5YiNK0hWwMs7N3k6HzsczMpsQlKOKrf843/4K/wpk0ira97MDh3Htnzz13ilpw69L0ZxTfuHnr9p2tu5179x88fNR9/OTY6sYwHDEttDktqEXBFY4cdwJPa4NUFgJPirM3IX+yQGO5VkduWeNE0pniFWfUeWra/ZUrzVWJykEnL3DGVcsdSv4JV508oHGSs1K7ZA JHc4SZ1uUefKAOgStIDhPgFnTtuKSiH6iKMge4QPWHDaTzncyLBF2BwZlBG/T04XyOBuHcf7oRJRT+fh5ak20zlf28nvMAdnamrXydrT4eJoPrNBXUS1IaSqwxTMKWoP0d70K1J/7OM+320kG6DrgKsg3okU0Mp90fealZI705TFBrx1lau0lLjeNMBH8aizVlZ3SGYw8VlWgn7XonK3jhmRIqbfzx5q7ZfztaKq1dysJXSurm9nIukNflxo2rXk1arurG+VkvflQ1ApyGsGAouUHmxNIDygz3WoHNqfF78c+g403ILo98FRzvDrJ0kL3f7R3sb+zYIs/Ic7JNMvKSHJC3ZEhGhEXDaBF9jr7Eo7iNv8bfLkrjaNPzlPwX8fffo8LdqQ==</latexit><latexit sha1_base64="jU/zB7ammE84ZCg95eBasoSM71Y=">AAAC03icbVJdaxNBFJ1dv2r8ivroy8Ws0EIIu31RSoWCLz5YiNK0hWwMs7N3k6HzsczMpsQlKOKrf843/4K/wpk0ira97MDh3Htnzz13ilpw69L0ZxTfuHnr9p2tu5179x88fNR9/OTY6sYwHDEttDktqEXBFY4cdwJPa4NUFgJPirM3IX+yQGO5VkduWeNE0pniFWfUeWra/ZUrzVWJykEnL3DGVcsdSv4JV508oHGSs1K7ZA JHc4SZ1uUefKAOgStIDhPgFnTtuKSiH6iKMge4QPWHDaTzncyLBF2BwZlBG/T04XyOBuHcf7oRJRT+fh5ak20zlf28nvMAdnamrXydrT4eJoPrNBXUS1IaSqwxTMKWoP0d70K1J/7OM+320kG6DrgKsg3okU0Mp90fealZI705TFBrx1lau0lLjeNMBH8aizVlZ3SGYw8VlWgn7XonK3jhmRIqbfzx5q7ZfztaKq1dysJXSurm9nIukNflxo2rXk1arurG+VkvflQ1ApyGsGAouUHmxNIDygz3WoHNqfF78c+g403ILo98FRzvDrJ0kL3f7R3sb+zYIs/Ic7JNMvKSHJC3ZEhGhEXDaBF9jr7Eo7iNv8bfLkrjaNPzlPwX8fffo8LdqQ==</latexit>
Theorem. Let {Hn}n ✓ H be a sequence of subspaces of L1[0, R], with
dim(Hn) c0n and inf'2Hn k'(·)� �(·)kL1([0,R]) c1n�s, for some constants
c0, c1, s > 0. It exists, for example, if � is s-Holder regular.
Choose n⇤ = (M/logM)1
2s+1 : then for some C = C(c0, c1, R, S)
E[kb�L,M,Hn⇤ (·) ·��(·) · kL2(⇢TL)]
C
cL,N,H
✓logM
M
◆ s2s+1
.<latexit sha1_base64="mSD9IRDIH6WlwO8G8A1ZVPGe2jA=">AAAEjXicbVNtb9s2EFZjb+u0l6bbx305NBpgd4onp1i7Fm1RwBiWAcnQdUlbwHQEijpZRCXSIam2AcNfs3+0b/s3Iy0nTdYdIOJ4r8891BWrhmuTZf/c2BoMP/n0s5ufx198+dXXt7Zvf/NSy04xPGaykep1QTU2XOCx4abB1yuFtC0afFW8mQX/q7eoNJfiyJytcNHSpeAVZ9R4U3576y8iJBclCmNJUcFRjVJh6ybxARpIiC UtNTWjjd13uSDh012h0eDpFU8CBQIFjacdCoYgKwhRK8pQh0tycGIJF5U5c/MsfbFIUnjHTQ2+QSiiWlvy1o2u9RoDafAUWJ6BSICKEuIk1MgteUvVqubgb3AtxZHzjW9EWCnNeJd80Ml5bg9OehSjNYqxg4seUxAndlc7D6ySCrRsEZgU2lBhNCQeRBqiUtDwNEsmEP9mAN/759F9Ar6n7arBFLgfNjRNgPs8nezukzuyKVGBwmXXUDWJ40vGYVZLqdHTIPK7T0b20P1oSSOXcOjGnrBKUWanzu7pH6bOJY/A1Cg+4EtmT2ajgGwN7EX65ziJSYFLLixt+FLcdXFPT1HYX9ycnAN5x0usqQkAPRnpYXqVPutBOHfBVjiv0RfOnsO9EVG1zA9OjjyDi57CHuzMWRYK/361sHMhpDKjPmYzoB+WKL6szeWk+mJSkk6AoCgvx8i3d7JJthb4WJlulJ1oI8/z7b9JKVnXeo5ZQ7WeT7OVWViqDGcNuph0Gv3P+YYuce5VQVvUC7veJgffe0u5prmS/o3W1qsZlrZan7WFjwxD6v/6gvH/fPPOVD8vLBerzvgt6RtVXQNGQlhNKLlCZpozr1CmuMcKrKaeGuMXuCfhYZD7lyN/rLzcm0zvTe79sbfz7PGGjpvRd9GdaBRNowfRs2g/eh4dR2wQD7LBw8Gj4a3hT8PHw6d96NaNTc630TUZ/vovbaF2lg==</latexit>

125 250 500 1000 2000 4000 8000L
8000
4000
2000
1000
500
250
125
63
32
1
M
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
Main Theorem
· The good: Rate in M is optimal, in fact even optimal in the case ofregression, where we would be given (rm,�(rm))Mm=1.
· The bad: no dependency on L.<latexit sha1_base64="jU/zB7ammE84ZCg95eBasoSM71Y=">AAAC03icbVJdaxNBFJ1dv2r8ivroy8Ws0EIIu31RSoWCLz5YiNK0hWwMs7N3k6HzsczMpsQlKOKrf843/4K/wpk0ira97MDh3Htnzz13ilpw69L0ZxTfuHnr9p2tu5179x88fNR9/OTY6sYwHDEttDktqEXBFY4cdwJPa4NUFgJPirM3IX+yQGO5VkduWeNE0pniFWfUeWra/ZUrzVWJykEnL3DGVcsdSv4JV508oHGSs1K7ZA JHc4SZ1uUefKAOgStIDhPgFnTtuKSiH6iKMge4QPWHDaTzncyLBF2BwZlBG/T04XyOBuHcf7oRJRT+fh5ak20zlf28nvMAdnamrXydrT4eJoPrNBXUS1IaSqwxTMKWoP0d70K1J/7OM+320kG6DrgKsg3okU0Mp90fealZI705TFBrx1lau0lLjeNMBH8aizVlZ3SGYw8VlWgn7XonK3jhmRIqbfzx5q7ZfztaKq1dysJXSurm9nIukNflxo2rXk1arurG+VkvflQ1ApyGsGAouUHmxNIDygz3WoHNqfF78c+g403ILo98FRzvDrJ0kL3f7R3sb+zYIs/Ic7JNMvKSHJC3ZEhGhEXDaBF9jr7Eo7iNv8bfLkrjaNPzlPwX8fffo8LdqQ==</latexit><latexit sha1_base64="jU/zB7ammE84ZCg95eBasoSM71Y=">AAAC03icbVJdaxNBFJ1dv2r8ivroy8Ws0EIIu31RSoWCLz5YiNK0hWwMs7N3k6HzsczMpsQlKOKrf843/4K/wpk0ira97MDh3Htnzz13ilpw69L0ZxTfuHnr9p2tu5179x88fNR9/OTY6sYwHDEttDktqEXBFY4cdwJPa4NUFgJPirM3IX+yQGO5VkduWeNE0pniFWfUeWra/ZUrzVWJykEnL3DGVcsdSv4JV508oHGSs1K7ZA JHc4SZ1uUefKAOgStIDhPgFnTtuKSiH6iKMge4QPWHDaTzncyLBF2BwZlBG/T04XyOBuHcf7oRJRT+fh5ak20zlf28nvMAdnamrXydrT4eJoPrNBXUS1IaSqwxTMKWoP0d70K1J/7OM+320kG6DrgKsg3okU0Mp90fealZI705TFBrx1lau0lLjeNMBH8aizVlZ3SGYw8VlWgn7XonK3jhmRIqbfzx5q7ZfztaKq1dysJXSurm9nIukNflxo2rXk1arurG+VkvflQ1ApyGsGAouUHmxNIDygz3WoHNqfF78c+g403ILo98FRzvDrJ0kL3f7R3sb+zYIs/Ic7JNMvKSHJC3ZEhGhEXDaBF9jr7Eo7iNv8bfLkrjaNPzlPwX8fffo8LdqQ==</latexit><latexit sha1_base64="jU/zB7ammE84ZCg95eBasoSM71Y=">AAAC03icbVJdaxNBFJ1dv2r8ivroy8Ws0EIIu31RSoWCLz5YiNK0hWwMs7N3k6HzsczMpsQlKOKrf843/4K/wpk0ira97MDh3Htnzz13ilpw69L0ZxTfuHnr9p2tu5179x88fNR9/OTY6sYwHDEttDktqEXBFY4cdwJPa4NUFgJPirM3IX+yQGO5VkduWeNE0pniFWfUeWra/ZUrzVWJykEnL3DGVcsdSv4JV508oHGSs1K7ZA JHc4SZ1uUefKAOgStIDhPgFnTtuKSiH6iKMge4QPWHDaTzncyLBF2BwZlBG/T04XyOBuHcf7oRJRT+fh5ak20zlf28nvMAdnamrXydrT4eJoPrNBXUS1IaSqwxTMKWoP0d70K1J/7OM+320kG6DrgKsg3okU0Mp90fealZI705TFBrx1lau0lLjeNMBH8aizVlZ3SGYw8VlWgn7XonK3jhmRIqbfzx5q7ZfztaKq1dysJXSurm9nIukNflxo2rXk1arurG+VkvflQ1ApyGsGAouUHmxNIDygz3WoHNqfF78c+g403ILo98FRzvDrJ0kL3f7R3sb+zYIs/Ic7JNMvKSHJC3ZEhGhEXDaBF9jr7Eo7iNv8bfLkrjaNPzlPwX8fffo8LdqQ==</latexit><latexit sha1_base64="jU/zB7ammE84ZCg95eBasoSM71Y=">AAAC03icbVJdaxNBFJ1dv2r8ivroy8Ws0EIIu31RSoWCLz5YiNK0hWwMs7N3k6HzsczMpsQlKOKrf843/4K/wpk0ira97MDh3Htnzz13ilpw69L0ZxTfuHnr9p2tu5179x88fNR9/OTY6sYwHDEttDktqEXBFY4cdwJPa4NUFgJPirM3IX+yQGO5VkduWeNE0pniFWfUeWra/ZUrzVWJykEnL3DGVcsdSv4JV508oHGSs1K7ZA JHc4SZ1uUefKAOgStIDhPgFnTtuKSiH6iKMge4QPWHDaTzncyLBF2BwZlBG/T04XyOBuHcf7oRJRT+fh5ak20zlf28nvMAdnamrXydrT4eJoPrNBXUS1IaSqwxTMKWoP0d70K1J/7OM+320kG6DrgKsg3okU0Mp90fealZI705TFBrx1lau0lLjeNMBH8aizVlZ3SGYw8VlWgn7XonK3jhmRIqbfzx5q7ZfztaKq1dysJXSurm9nIukNflxo2rXk1arurG+VkvflQ1ApyGsGAouUHmxNIDygz3WoHNqfF78c+g403ILo98FRzvDrJ0kL3f7R3sb+zYIs/Ic7JNMvKSHJC3ZEhGhEXDaBF9jr7Eo7iNv8bfLkrjaNPzlPwX8fffo8LdqQ==</latexit>
Numerical results suggest that thee↵ective sample size shouldscale linearly in L, at least up to a point.
<latexit sha1_base64="fqkDPyqml9KGD+uHMLTy10d6QPE=">AAACeHicbVFLbxMxEPYur7K8Ahx7GZFUgISi3VzgwKESFw4IFYm0lZIomnhnE6te78oeVwpRfwP/jRs/hAsnZtNIlJaRbH+al7/5ZtFaEzjPfybprdt37t7bu589ePjo8ZPe02fHoYle01g3tvGnCwxkjaMxG7Z02nrCemHpZHH2oYufnJMPpnFfed3SrMalM5XRyOKa975PXWNcSY7hc6zJS8CCpxAtBwhxuaTAwCvsLsqyv9lUVaTZnBMErFsrj/km16qJtoSriUE6EnT80Ns1GAeDT4M3IB0toTSPLXADCK0U8HDe6+fDfGtwExQ70Fc7O5r3fkzLRgt1x9piCJMib3m2Qc9GW7rIpjFQi/oMlzQR6LCmMNtshbuAA/GUUDVejlDdeq9WbLAOYV0vJLNGXoXrsc75v9gkcvVutjGujUxOX35URdtN2m0BSuNFPZGjNKi9Ea6gV+hRs+wqExGK6yPfBMejYZEPiy+j/uH7nRx7al+9UK9Uod6qQ/VRHamx0upXsp8MkoPkdwrpy/T1ZWqa7Gqeq38sHf0BN2G+qg==</latexit><latexit sha1_base64="fqkDPyqml9KGD+uHMLTy10d6QPE=">AAACeHicbVFLbxMxEPYur7K8Ahx7GZFUgISi3VzgwKESFw4IFYm0lZIomnhnE6te78oeVwpRfwP/jRs/hAsnZtNIlJaRbH+al7/5ZtFaEzjPfybprdt37t7bu589ePjo8ZPe02fHoYle01g3tvGnCwxkjaMxG7Z02nrCemHpZHH2oYufnJMPpnFfed3SrMalM5XRyOKa975PXWNcSY7hc6zJS8CCpxAtBwhxuaTAwCvsLsqyv9lUVaTZnBMErFsrj/km16qJtoSriUE6EnT80Ns1GAeDT4M3IB0toTSPLXADCK0U8HDe6+fDfGtwExQ70Fc7O5r3fkzLRgt1x9piCJMib3m2Qc9GW7rIpjFQi/oMlzQR6LCmMNtshbuAA/GUUDVejlDdeq9WbLAOYV0vJLNGXoXrsc75v9gkcvVutjGujUxOX35URdtN2m0BSuNFPZGjNKi9Ea6gV+hRs+wqExGK6yPfBMejYZEPiy+j/uH7nRx7al+9UK9Uod6qQ/VRHamx0upXsp8MkoPkdwrpy/T1ZWqa7Gqeq38sHf0BN2G+qg==</latexit><latexit sha1_base64="fqkDPyqml9KGD+uHMLTy10d6QPE=">AAACeHicbVFLbxMxEPYur7K8Ahx7GZFUgISi3VzgwKESFw4IFYm0lZIomnhnE6te78oeVwpRfwP/jRs/hAsnZtNIlJaRbH+al7/5ZtFaEzjPfybprdt37t7bu589ePjo8ZPe02fHoYle01g3tvGnCwxkjaMxG7Z02nrCemHpZHH2oYufnJMPpnFfed3SrMalM5XRyOKa975PXWNcSY7hc6zJS8CCpxAtBwhxuaTAwCvsLsqyv9lUVaTZnBMErFsrj/km16qJtoSriUE6EnT80Ns1GAeDT4M3IB0toTSPLXADCK0U8HDe6+fDfGtwExQ70Fc7O5r3fkzLRgt1x9piCJMib3m2Qc9GW7rIpjFQi/oMlzQR6LCmMNtshbuAA/GUUDVejlDdeq9WbLAOYV0vJLNGXoXrsc75v9gkcvVutjGujUxOX35URdtN2m0BSuNFPZGjNKi9Ea6gV+hRs+wqExGK6yPfBMejYZEPiy+j/uH7nRx7al+9UK9Uod6qQ/VRHamx0upXsp8MkoPkdwrpy/T1ZWqa7Gqeq38sHf0BN2G+qg==</latexit><latexit sha1_base64="fqkDPyqml9KGD+uHMLTy10d6QPE=">AAACeHicbVFLbxMxEPYur7K8Ahx7GZFUgISi3VzgwKESFw4IFYm0lZIomnhnE6te78oeVwpRfwP/jRs/hAsnZtNIlJaRbH+al7/5ZtFaEzjPfybprdt37t7bu589ePjo8ZPe02fHoYle01g3tvGnCwxkjaMxG7Z02nrCemHpZHH2oYufnJMPpnFfed3SrMalM5XRyOKa975PXWNcSY7hc6zJS8CCpxAtBwhxuaTAwCvsLsqyv9lUVaTZnBMErFsrj/km16qJtoSriUE6EnT80Ns1GAeDT4M3IB0toTSPLXADCK0U8HDe6+fDfGtwExQ70Fc7O5r3fkzLRgt1x9piCJMib3m2Qc9GW7rIpjFQi/oMlzQR6LCmMNtshbuAA/GUUDVejlDdeq9WbLAOYV0vJLNGXoXrsc75v9gkcvVutjGujUxOX35URdtN2m0BSuNFPZGjNKi9Ea6gV+hRs+wqExGK6yPfBMejYZEPiy+j/uH7nRx7al+9UK9Uod6qQ/VRHamx0upXsp8MkoPkdwrpy/T1ZWqa7Gqeq38sHf0BN2G+qg==</latexit>
Theorem. Let {Hn}n ✓ H be a sequence of subspaces of L1[0, R], with
dim(Hn) c0n and inf'2Hn k'(·)� �(·)kL1([0,R]) c1n�s, for some constants
c0, c1, s > 0. It exists, for example, if � is s-Holder regular.
Choose n⇤ = (M/logM)1
2s+1 : then for some C = C(c0, c1, R, S)
E[kb�L,M,Hn⇤ (·) ·��(·) · kL2(⇢TL)]
C
cL,N,H
✓logM
M
◆ s2s+1
.<latexit sha1_base64="mSD9IRDIH6WlwO8G8A1ZVPGe2jA=">AAAEjXicbVNtb9s2EFZjb+u0l6bbx305NBpgd4onp1i7Fm1RwBiWAcnQdUlbwHQEijpZRCXSIam2AcNfs3+0b/s3Iy0nTdYdIOJ4r8891BWrhmuTZf/c2BoMP/n0s5ufx198+dXXt7Zvf/NSy04xPGaykep1QTU2XOCx4abB1yuFtC0afFW8mQX/q7eoNJfiyJytcNHSpeAVZ9R4U3576y8iJBclCmNJUcFRjVJh6ybxARpIiC UtNTWjjd13uSDh012h0eDpFU8CBQIFjacdCoYgKwhRK8pQh0tycGIJF5U5c/MsfbFIUnjHTQ2+QSiiWlvy1o2u9RoDafAUWJ6BSICKEuIk1MgteUvVqubgb3AtxZHzjW9EWCnNeJd80Ml5bg9OehSjNYqxg4seUxAndlc7D6ySCrRsEZgU2lBhNCQeRBqiUtDwNEsmEP9mAN/759F9Ar6n7arBFLgfNjRNgPs8nezukzuyKVGBwmXXUDWJ40vGYVZLqdHTIPK7T0b20P1oSSOXcOjGnrBKUWanzu7pH6bOJY/A1Cg+4EtmT2ajgGwN7EX65ziJSYFLLixt+FLcdXFPT1HYX9ycnAN5x0usqQkAPRnpYXqVPutBOHfBVjiv0RfOnsO9EVG1zA9OjjyDi57CHuzMWRYK/361sHMhpDKjPmYzoB+WKL6szeWk+mJSkk6AoCgvx8i3d7JJthb4WJlulJ1oI8/z7b9JKVnXeo5ZQ7WeT7OVWViqDGcNuph0Gv3P+YYuce5VQVvUC7veJgffe0u5prmS/o3W1qsZlrZan7WFjwxD6v/6gvH/fPPOVD8vLBerzvgt6RtVXQNGQlhNKLlCZpozr1CmuMcKrKaeGuMXuCfhYZD7lyN/rLzcm0zvTe79sbfz7PGGjpvRd9GdaBRNowfRs2g/eh4dR2wQD7LBw8Gj4a3hT8PHw6d96NaNTc630TUZ/vovbaF2lg==</latexit>

Main Theorem
5 10 15 20 25 30N
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
Coe
civi
ty c
onst
ant
N/(N-1) 2Gaussian
5 10 15 20 25 30N
N/(N-1) 2Uniform
5 10 15 20 25 30N
N/(N-1) 2Spherical Uniform
cL,N,H can be as small as N�1N2 , but in fact we conjecture that under some
general conditions it is independent of N when evaluated on compact subspacesH ⇢ L2(⇢LT ). We can prove this in special cases, for L = 1 and µ0 exchangeableGaussian.
<latexit sha1_base64="wIpTsQJIZdxRzGpVYLevAqmRbE4=">AAADHnicbVJLb9NAELbNq4RXCkcuI2qkIoXIjpDgAFIlDvQQRUXqS6rTaLweJ0vXu9Y+WiIrv4QLf4ULBxBC4gT/hnUaCWiZg/XpmxnPN99sXgtubJL8CqMrV69dv7F2s3Pr9p2797rr9/eNcprRHlNC6cMcDQkuac9yK+iw1oRVLuggP3nd5g9OSRuu5K6d1zSucCp5yRlaT03Ww2eZVFwWJC3EbNIMe6NeVqGdMRTN9mIRA0 MJOQEaMBUK0YI4KzWyZvQ0XTSj48Ei7kHuLHAJJTILZwRMyXfErNMEdoYWnJ+gwaiKYEqSNIq2pOCtCAPc9/qvr6npXIoqIR7FcDYjCXSKwqGlApT0XVXdzjAuNx5QK+aP3KylycLweLCZ6Zma7B4Pn8R9OKDlGrVWp62g5TAwNTHeCvH2mR6USkM8fJXGgLJo/+omSQz0ns1QTgm9ofAGnTEcZX/S3Uj6yTLgMkhXYCNYxc6k+yMrFHOV340JNOYoTWo7blBbzgQtOpkz5Nc5wSkdeSixIjNuluddwGPPFEt9pfLeLNm/OxqsjJlXua9srTAXcy35v9yRs+WLccNl7SxJdj6odAKsgvatQMG1P6KYe4BM+2Mx8G7401v/ojrehPTiypfB/qCfJv307WBj6+XKjrXgYfAo2AzS4HmwFWwHO8FewMIP4afwS/g1+hh9jr5F389Lo3DV8yD4J6KfvwEfNfp8</latexit><latexit sha1_base64="wIpTsQJIZdxRzGpVYLevAqmRbE4=">AAADHnicbVJLb9NAELbNq4RXCkcuI2qkIoXIjpDgAFIlDvQQRUXqS6rTaLweJ0vXu9Y+WiIrv4QLf4ULBxBC4gT/hnUaCWiZg/XpmxnPN99sXgtubJL8CqMrV69dv7F2s3Pr9p2797rr9/eNcprRHlNC6cMcDQkuac9yK+iw1oRVLuggP3nd5g9OSRuu5K6d1zSucCp5yRlaT03Ww2eZVFwWJC3EbNIMe6NeVqGdMRTN9mIRA0 MJOQEaMBUK0YI4KzWyZvQ0XTSj48Ei7kHuLHAJJTILZwRMyXfErNMEdoYWnJ+gwaiKYEqSNIq2pOCtCAPc9/qvr6npXIoqIR7FcDYjCXSKwqGlApT0XVXdzjAuNx5QK+aP3KylycLweLCZ6Zma7B4Pn8R9OKDlGrVWp62g5TAwNTHeCvH2mR6USkM8fJXGgLJo/+omSQz0ns1QTgm9ofAGnTEcZX/S3Uj6yTLgMkhXYCNYxc6k+yMrFHOV340JNOYoTWo7blBbzgQtOpkz5Nc5wSkdeSixIjNuluddwGPPFEt9pfLeLNm/OxqsjJlXua9srTAXcy35v9yRs+WLccNl7SxJdj6odAKsgvatQMG1P6KYe4BM+2Mx8G7401v/ojrehPTiypfB/qCfJv307WBj6+XKjrXgYfAo2AzS4HmwFWwHO8FewMIP4afwS/g1+hh9jr5F389Lo3DV8yD4J6KfvwEfNfp8</latexit><latexit sha1_base64="wIpTsQJIZdxRzGpVYLevAqmRbE4=">AAADHnicbVJLb9NAELbNq4RXCkcuI2qkIoXIjpDgAFIlDvQQRUXqS6rTaLweJ0vXu9Y+WiIrv4QLf4ULBxBC4gT/hnUaCWiZg/XpmxnPN99sXgtubJL8CqMrV69dv7F2s3Pr9p2797rr9/eNcprRHlNC6cMcDQkuac9yK+iw1oRVLuggP3nd5g9OSRuu5K6d1zSucCp5yRlaT03Ww2eZVFwWJC3EbNIMe6NeVqGdMRTN9mIRA0 MJOQEaMBUK0YI4KzWyZvQ0XTSj48Ei7kHuLHAJJTILZwRMyXfErNMEdoYWnJ+gwaiKYEqSNIq2pOCtCAPc9/qvr6npXIoqIR7FcDYjCXSKwqGlApT0XVXdzjAuNx5QK+aP3KylycLweLCZ6Zma7B4Pn8R9OKDlGrVWp62g5TAwNTHeCvH2mR6USkM8fJXGgLJo/+omSQz0ns1QTgm9ofAGnTEcZX/S3Uj6yTLgMkhXYCNYxc6k+yMrFHOV340JNOYoTWo7blBbzgQtOpkz5Nc5wSkdeSixIjNuluddwGPPFEt9pfLeLNm/OxqsjJlXua9srTAXcy35v9yRs+WLccNl7SxJdj6odAKsgvatQMG1P6KYe4BM+2Mx8G7401v/ojrehPTiypfB/qCfJv307WBj6+XKjrXgYfAo2AzS4HmwFWwHO8FewMIP4afwS/g1+hh9jr5F389Lo3DV8yD4J6KfvwEfNfp8</latexit><latexit sha1_base64="wIpTsQJIZdxRzGpVYLevAqmRbE4=">AAADHnicbVJLb9NAELbNq4RXCkcuI2qkIoXIjpDgAFIlDvQQRUXqS6rTaLweJ0vXu9Y+WiIrv4QLf4ULBxBC4gT/hnUaCWiZg/XpmxnPN99sXgtubJL8CqMrV69dv7F2s3Pr9p2797rr9/eNcprRHlNC6cMcDQkuac9yK+iw1oRVLuggP3nd5g9OSRuu5K6d1zSucCp5yRlaT03Ww2eZVFwWJC3EbNIMe6NeVqGdMRTN9mIRA0 MJOQEaMBUK0YI4KzWyZvQ0XTSj48Ei7kHuLHAJJTILZwRMyXfErNMEdoYWnJ+gwaiKYEqSNIq2pOCtCAPc9/qvr6npXIoqIR7FcDYjCXSKwqGlApT0XVXdzjAuNx5QK+aP3KylycLweLCZ6Zma7B4Pn8R9OKDlGrVWp62g5TAwNTHeCvH2mR6USkM8fJXGgLJo/+omSQz0ns1QTgm9ofAGnTEcZX/S3Uj6yTLgMkhXYCNYxc6k+yMrFHOV340JNOYoTWo7blBbzgQtOpkz5Nc5wSkdeSixIjNuluddwGPPFEt9pfLeLNm/OxqsjJlXua9srTAXcy35v9yRs+WLccNl7SxJdj6odAKsgvatQMG1P6KYe4BM+2Mx8G7401v/ojrehPTiypfB/qCfJv307WBj6+XKjrXgYfAo2AzS4HmwFWwHO8FewMIP4afwS/g1+hh9jr5F389Lo3DV8yD4J6KfvwEfNfp8</latexit>
Theorem. Let {Hn}n ✓ H be a sequence of subspaces of L1[0, R], with
dim(Hn) c0n and inf'2Hn k'(·)� �(·)kL1([0,R]) c1n�s, for some constants
c0, c1, s > 0. It exists, for example, if � is s-Holder regular.
Choose n⇤ = (M/logM)1
2s+1 : then for some C = C(c0, c1, R, S)
E[kb�L,M,Hn⇤ (·) ·��(·) · kL2(⇢TL)]
C
cL,N,H
✓logM
M
◆ s2s+1
.<latexit sha1_base64="mSD9IRDIH6WlwO8G8A1ZVPGe2jA=">AAAEjXicbVNtb9s2EFZjb+u0l6bbx305NBpgd4onp1i7Fm1RwBiWAcnQdUlbwHQEijpZRCXSIam2AcNfs3+0b/s3Iy0nTdYdIOJ4r8891BWrhmuTZf/c2BoMP/n0s5ufx198+dXXt7Zvf/NSy04xPGaykep1QTU2XOCx4abB1yuFtC0afFW8mQX/q7eoNJfiyJytcNHSpeAVZ9R4U3576y8iJBclCmNJUcFRjVJh6ybxARpIiC UtNTWjjd13uSDh012h0eDpFU8CBQIFjacdCoYgKwhRK8pQh0tycGIJF5U5c/MsfbFIUnjHTQ2+QSiiWlvy1o2u9RoDafAUWJ6BSICKEuIk1MgteUvVqubgb3AtxZHzjW9EWCnNeJd80Ml5bg9OehSjNYqxg4seUxAndlc7D6ySCrRsEZgU2lBhNCQeRBqiUtDwNEsmEP9mAN/759F9Ar6n7arBFLgfNjRNgPs8nezukzuyKVGBwmXXUDWJ40vGYVZLqdHTIPK7T0b20P1oSSOXcOjGnrBKUWanzu7pH6bOJY/A1Cg+4EtmT2ajgGwN7EX65ziJSYFLLixt+FLcdXFPT1HYX9ycnAN5x0usqQkAPRnpYXqVPutBOHfBVjiv0RfOnsO9EVG1zA9OjjyDi57CHuzMWRYK/361sHMhpDKjPmYzoB+WKL6szeWk+mJSkk6AoCgvx8i3d7JJthb4WJlulJ1oI8/z7b9JKVnXeo5ZQ7WeT7OVWViqDGcNuph0Gv3P+YYuce5VQVvUC7veJgffe0u5prmS/o3W1qsZlrZan7WFjwxD6v/6gvH/fPPOVD8vLBerzvgt6RtVXQNGQlhNKLlCZpozr1CmuMcKrKaeGuMXuCfhYZD7lyN/rLzcm0zvTe79sbfz7PGGjpvRd9GdaBRNowfRs2g/eh4dR2wQD7LBw8Gj4a3hT8PHw6d96NaNTc630TUZ/vovbaF2lg==</latexit>

Main TheoremTheorem. Let {Hn}n ✓ H be a sequence of subspaces of L1
[0, R], with
dim(Hn) c0n and inf'2Hn k'(·)� �(·)kL1([0,R]) c1n�s, for some constants
c0, c1, s > 0. It exists, for example, if � is s-Holder regular.
Choose n⇤ = (M/logM)1
2s+1 : then for some C = C(c0, c1, R, S)
E[kb�L,M,Hn⇤ (·) ·��(·) · kL2(⇢TL)]
C
cL,N,H
✓logM
M
◆ s2s+1
.<latexit sha1_base64="mSD9IRDIH6WlwO8G8A1ZVPGe2jA=">AAAEjXicbVNtb9s2EFZjb+u0l6bbx305NBpgd4onp1i7Fm1RwBiWAcnQdUlbwHQEijpZRCXSIam2AcNfs3+0b/s3Iy0nTdYdIOJ4r8891BWrhmuTZf/c2BoMP/n0s5ufx198+dXXt7Zvf/NSy04xPGaykep1QTU2XOCx4abB1yuFtC0afFW8mQX/q7eoNJfiyJytcNHSpeAVZ9R4U3576y8iJBclCmNJUcFRjVJh6ybxARpIiC UtNTWjjd13uSDh012h0eDpFU8CBQIFjacdCoYgKwhRK8pQh0tycGIJF5U5c/MsfbFIUnjHTQ2+QSiiWlvy1o2u9RoDafAUWJ6BSICKEuIk1MgteUvVqubgb3AtxZHzjW9EWCnNeJd80Ml5bg9OehSjNYqxg4seUxAndlc7D6ySCrRsEZgU2lBhNCQeRBqiUtDwNEsmEP9mAN/759F9Ar6n7arBFLgfNjRNgPs8nezukzuyKVGBwmXXUDWJ40vGYVZLqdHTIPK7T0b20P1oSSOXcOjGnrBKUWanzu7pH6bOJY/A1Cg+4EtmT2ajgGwN7EX65ziJSYFLLixt+FLcdXFPT1HYX9ycnAN5x0usqQkAPRnpYXqVPutBOHfBVjiv0RfOnsO9EVG1zA9OjjyDi57CHuzMWRYK/361sHMhpDKjPmYzoB+WKL6szeWk+mJSkk6AoCgvx8i3d7JJthb4WJlulJ1oI8/z7b9JKVnXeo5ZQ7WeT7OVWViqDGcNuph0Gv3P+YYuce5VQVvUC7veJgffe0u5prmS/o3W1qsZlrZan7WFjwxD6v/6gvH/fPPOVD8vLBerzvgt6RtVXQNGQlhNKLlCZpozr1CmuMcKrKaeGuMXuCfhYZD7lyN/rLzcm0zvTe79sbfz7PGGjpvRd9GdaBRNowfRs2g/eh4dR2wQD7LBw8Gj4a3hT8PHw6d96NaNTc630TUZ/vovbaF2lg==</latexit>
Learning interaction kernels in heterogeneous systems of agents from multiple trajectories, F. Lu, MM, S. Tang, arxiv 1910.04832
This result may be extended to heterogeneous agent systems (e.g. prey-predator)[Lu, Tang, MM, on arXiV].
It may also be extended to multi-variable interaction kernels, depending on moreobservables than pairwise distances, as well as second-order systems (work inprogress).
<latexit sha1_base64="BDXN8xw7LA79OEPDy1biDsFUs7c=">AAADFHicbVJLaxRBEJ4ZX3F9bfTopTAIiWyG3QR8gIeAFwUDEfKC3SXU9NTONtvTPXT1JC5LfoQX/4oXD4p49eDNf2PNZjGaWDA9RVV9fPV93VllNIdu91ecXLl67fqNpZutW7fv3L3XXr6/z672ivaUM84fZshktKW9oIOhw8oTlpmhg2zyqukfHJNn7exumFY0LLGweqQVBikdLcdPBtZpm5MNsDvWDJ64NgFKnEJGQO8DST OH4GBMgbwryJKrGbBoIDzlQCXDKqVFCsI8XZcjx+D8GvTf1h3YRVt0YHu7A84C+kO9P0wHg1brnPbNGRsadhcpS1lFrx+j1yiCQFvZAFWzOUzIWzLcgZwqmde2aAhK5wlcxuSPGwRDGKOFCrU/0UyQi6FoFQkMGU7ImObPpJzN153PyZ8rOnF+IowiyhViCq+lR+2VbtqdB1xOeotkJVrEzlH75yB3qi5FpTLI3O91qzCcoQ9aGTptDWqmCtVEvOxLarEkHs7ml3oKj6WSw8h5+cSlefVvxAxL5mmZyWSJYcwXe03xf71+HUbPhzNtq1qMVmdEo9o0fjcvREzypIKZSoLKa9kV1Bgb3+UdteYmvGji6R/Jl5P9jbS3mW6+21jZermwYyl6GD2KVqNe9Czail5HO9FepOIP8af4S/w1+Zh8Tr4l389Gk3iBeRD9E8mP3w2F+nA=</latexit>

Errors on trajectories
Proposition. Assume b�(k · k)· 2 Lip(Rd), with Lipschitz constant CLip. LetbX(t) and X(t) be the solutions of systems with kernels b� and � respectively,started from the same initial condition. Then for each trajectory
supt2[0,T ]
kbX(t)�X(t)k2 2Te8T2C2
Lip
Z T
0
���X(t)� f�(X(t))���2dt ,
and on average w.r.t. the distribution µ0 of initial conditions:
Eµ0 [ supt2[0,T ]
kbX(t)�X(t)k] C(T,CLip)pNk�(·) ·��(·) · kL2(⇢T ) ,
where C(T,CLip) is a constant depending on T and CLip.<latexit sha1_base64="QnJwhC38terRhr6i2VzAh4sqKQw=">AAAFNnicbZTPj9NGFMcNCT/qFtiFI5cH60qJFCwnFxDiAFoh9bCqtsgLK2USazwer4e1Z8zMmFXw+q/qpX9Hb1x6aFVx5U/os2NIdrcTKXp+M/N+fN7XjstcGBsEn69dHwxv3Lx1+wf3x5/u3L23s3v/rVGVZvyIqVzp45gangvJj6ywOT8uNadFnPN38el+u//uI9dGKBnaVckXBT2RIhWMWnRFu4MDIpWQCZe2JnEKh1qVyo h2s/HdV8ZUBQePnImEZ9SSMhMjck5Yoiw5H0NnABGSFNRmuqgPRNmMuoc4rt80y2TsTeBM2Axwx7BM2E/AlDSWSgveflST/lLj+XDA7SZV3ZVz3DQjO/aAygS83tM5Yg4242BUXrW1GlApmJWxvDDrfKdcS56bi7X3gdam5qbkzIqPPF9NAEvSlieQalWsQ1PsXEhEQfO25qSD4kOYcQmp0sApy8Bq+h6DKL1yPY+YqoxqizzmwSRcNOQReQSI61tL3+t/AhubnC9nLsn5B5iFfFk/C5ez/eVsi0wDbRz8CWmjYBn2TzlPcQYEB7AVd40+rdMGA3QpsVVkuDkyJlqcZLbNug6UWDKZYPFui0ZJoCgXesLhzNe+9TsUCepQi7gjjfSKKgq8FvgVOua5S+but/m/botoDzfzy2S2qWwN+iKXBXRYYH8UTmBbKyg880Hb+tcuzvc2R50cx93/k7VUNw5yHtUHy9mI6ExF4bhpmyYLOMu4RoFfTeGBMEA3Yk14ybFLedIy8sJeSRcV7EY7e4EfdAuuGtPe2HP6dRjt/IkDZPiOSctyasx8GpR2UaMUBct545LK8JKyUxzIHE2JmjSLunvtG/gZPUknxVRhhZ13+0ZNC2NWRYwn24mYy3ut8//25pVNny1qIcvKcsnWidIqB6ug/YagHjRqPl+hQZnGyTNgGdWUWfzStBCml1u+aryd+dPAn/4223v5osdx23noPHZGztR56rx0fnEOnSOHDX4ffB78Pfhn+Mfwr+G/wy/ro9ev9XceOBfW8Ot/WwS5oA==</latexit><latexit sha1_base64="QnJwhC38terRhr6i2VzAh4sqKQw=">AAAFNnicbZTPj9NGFMcNCT/qFtiFI5cH60qJFCwnFxDiAFoh9bCqtsgLK2USazwer4e1Z8zMmFXw+q/qpX9Hb1x6aFVx5U/os2NIdrcTKXp+M/N+fN7XjstcGBsEn69dHwxv3Lx1+wf3x5/u3L23s3v/rVGVZvyIqVzp45gangvJj6ywOT8uNadFnPN38el+u//uI9dGKBnaVckXBT2RIhWMWnRFu4MDIpWQCZe2JnEKh1qVyo h2s/HdV8ZUBQePnImEZ9SSMhMjck5Yoiw5H0NnABGSFNRmuqgPRNmMuoc4rt80y2TsTeBM2Axwx7BM2E/AlDSWSgveflST/lLj+XDA7SZV3ZVz3DQjO/aAygS83tM5Yg4242BUXrW1GlApmJWxvDDrfKdcS56bi7X3gdam5qbkzIqPPF9NAEvSlieQalWsQ1PsXEhEQfO25qSD4kOYcQmp0sApy8Bq+h6DKL1yPY+YqoxqizzmwSRcNOQReQSI61tL3+t/AhubnC9nLsn5B5iFfFk/C5ez/eVsi0wDbRz8CWmjYBn2TzlPcQYEB7AVd40+rdMGA3QpsVVkuDkyJlqcZLbNug6UWDKZYPFui0ZJoCgXesLhzNe+9TsUCepQi7gjjfSKKgq8FvgVOua5S+but/m/botoDzfzy2S2qWwN+iKXBXRYYH8UTmBbKyg880Hb+tcuzvc2R50cx93/k7VUNw5yHtUHy9mI6ExF4bhpmyYLOMu4RoFfTeGBMEA3Yk14ybFLedIy8sJeSRcV7EY7e4EfdAuuGtPe2HP6dRjt/IkDZPiOSctyasx8GpR2UaMUBct545LK8JKyUxzIHE2JmjSLunvtG/gZPUknxVRhhZ13+0ZNC2NWRYwn24mYy3ut8//25pVNny1qIcvKcsnWidIqB6ug/YagHjRqPl+hQZnGyTNgGdWUWfzStBCml1u+aryd+dPAn/4223v5osdx23noPHZGztR56rx0fnEOnSOHDX4ffB78Pfhn+Mfwr+G/wy/ro9ev9XceOBfW8Ot/WwS5oA==</latexit><latexit sha1_base64="QnJwhC38terRhr6i2VzAh4sqKQw=">AAAFNnicbZTPj9NGFMcNCT/qFtiFI5cH60qJFCwnFxDiAFoh9bCqtsgLK2USazwer4e1Z8zMmFXw+q/qpX9Hb1x6aFVx5U/os2NIdrcTKXp+M/N+fN7XjstcGBsEn69dHwxv3Lx1+wf3x5/u3L23s3v/rVGVZvyIqVzp45gangvJj6ywOT8uNadFnPN38el+u//uI9dGKBnaVckXBT2RIhWMWnRFu4MDIpWQCZe2JnEKh1qVyo h2s/HdV8ZUBQePnImEZ9SSMhMjck5Yoiw5H0NnABGSFNRmuqgPRNmMuoc4rt80y2TsTeBM2Axwx7BM2E/AlDSWSgveflST/lLj+XDA7SZV3ZVz3DQjO/aAygS83tM5Yg4242BUXrW1GlApmJWxvDDrfKdcS56bi7X3gdam5qbkzIqPPF9NAEvSlieQalWsQ1PsXEhEQfO25qSD4kOYcQmp0sApy8Bq+h6DKL1yPY+YqoxqizzmwSRcNOQReQSI61tL3+t/AhubnC9nLsn5B5iFfFk/C5ez/eVsi0wDbRz8CWmjYBn2TzlPcQYEB7AVd40+rdMGA3QpsVVkuDkyJlqcZLbNug6UWDKZYPFui0ZJoCgXesLhzNe+9TsUCepQi7gjjfSKKgq8FvgVOua5S+but/m/botoDzfzy2S2qWwN+iKXBXRYYH8UTmBbKyg880Hb+tcuzvc2R50cx93/k7VUNw5yHtUHy9mI6ExF4bhpmyYLOMu4RoFfTeGBMEA3Yk14ybFLedIy8sJeSRcV7EY7e4EfdAuuGtPe2HP6dRjt/IkDZPiOSctyasx8GpR2UaMUBct545LK8JKyUxzIHE2JmjSLunvtG/gZPUknxVRhhZ13+0ZNC2NWRYwn24mYy3ut8//25pVNny1qIcvKcsnWidIqB6ug/YagHjRqPl+hQZnGyTNgGdWUWfzStBCml1u+aryd+dPAn/4223v5osdx23noPHZGztR56rx0fnEOnSOHDX4ffB78Pfhn+Mfwr+G/wy/ro9ev9XceOBfW8Ot/WwS5oA==</latexit><latexit sha1_base64="QnJwhC38terRhr6i2VzAh4sqKQw=">AAAFNnicbZTPj9NGFMcNCT/qFtiFI5cH60qJFCwnFxDiAFoh9bCqtsgLK2USazwer4e1Z8zMmFXw+q/qpX9Hb1x6aFVx5U/os2NIdrcTKXp+M/N+fN7XjstcGBsEn69dHwxv3Lx1+wf3x5/u3L23s3v/rVGVZvyIqVzp45gangvJj6ywOT8uNadFnPN38el+u//uI9dGKBnaVckXBT2RIhWMWnRFu4MDIpWQCZe2JnEKh1qVyo h2s/HdV8ZUBQePnImEZ9SSMhMjck5Yoiw5H0NnABGSFNRmuqgPRNmMuoc4rt80y2TsTeBM2Axwx7BM2E/AlDSWSgveflST/lLj+XDA7SZV3ZVz3DQjO/aAygS83tM5Yg4242BUXrW1GlApmJWxvDDrfKdcS56bi7X3gdam5qbkzIqPPF9NAEvSlieQalWsQ1PsXEhEQfO25qSD4kOYcQmp0sApy8Bq+h6DKL1yPY+YqoxqizzmwSRcNOQReQSI61tL3+t/AhubnC9nLsn5B5iFfFk/C5ez/eVsi0wDbRz8CWmjYBn2TzlPcQYEB7AVd40+rdMGA3QpsVVkuDkyJlqcZLbNug6UWDKZYPFui0ZJoCgXesLhzNe+9TsUCepQi7gjjfSKKgq8FvgVOua5S+but/m/botoDzfzy2S2qWwN+iKXBXRYYH8UTmBbKyg880Hb+tcuzvc2R50cx93/k7VUNw5yHtUHy9mI6ExF4bhpmyYLOMu4RoFfTeGBMEA3Yk14ybFLedIy8sJeSRcV7EY7e4EfdAuuGtPe2HP6dRjt/IkDZPiOSctyasx8GpR2UaMUBct545LK8JKyUxzIHE2JmjSLunvtG/gZPUknxVRhhZ13+0ZNC2NWRYwn24mYy3ut8//25pVNny1qIcvKcsnWidIqB6ug/YagHjRqPl+hQZnGyTNgGdWUWfzStBCml1u+aryd+dPAn/4223v5osdx23noPHZGztR56rx0fnEOnSOHDX4ffB78Pfhn+Mfwr+G/wy/ro9ev9XceOBfW8Ot/WwS5oA==</latexit>
Standard arguments yield bounds on trajectories between trajectories of thetrue system and those of the system driven by the estimated interaction kernel.
<latexit sha1_base64="jGEC5/Ri6099vGvAbSwWEUKitts=">AAACjnicbZHfb9MwEMedsMHoBgR45OVENWlPVVKkgfghJvGyxyHoNqmtKse+tF4dO7IvQ1G1P4d/iDf+G5wsSKPjJEtffc5n330vr7TylKa/o/jBzu7DR3uPB/sHT54+S56/OPe2dgInwmrrLnPuUSuDE1Kk8bJyyMtc40W+/tLmL67ReWXNd2oqnJd8aVShBKeAFsnPmbHKSDQE34gbyZ0E7pZ1GYiHRqGWkNvaSA/WADl+hY KsU+ghR/qBuAVtAbTCwGoE33jCEsKrgVmPf5M9l05dh/K86SB6UiUnlKAMoeOi7Q/W6Azq0SIZpqO0C7gvsl4MWR9ni+TXTFrRTSE0936apRXNN9yREhpvBrPaY8XFmi9xGqThJfr5prPzBg4DkVBYF07wpaN3Kza89L4p83AzdLzy27kW/i83ral4N98oU9WERtx+VNQayEK7G5DKBSN1EwQXToVeQax460XY4CCYkG2PfF+cj0fZm9H463h48rG3Y4+9Yq/ZEcvYW3bCTtkZmzAR7UdZ9D76ECfxcfwp/nx7NY76mpfsn4hP/wA+wciK</latexit>

Example 2nd order Prey-Predator system. Left: the interaction kernels and⇢TL’s. Right: trajectories of the true system (left col.) and learned system (rightcol.) with an initial condition from training data (top) and a new one (bottom).
<latexit sha1_base64="wVU8ZJ8q3r0pRZawpzxw2lVykos=">AAAC7nicbVJNb9NAEF2bAiV8pXDkMiJFpAcsOxcQ4lAJIXHoIaCmrdSEaL0ex0vWu9bumhJF/RFcOIAQV34PN/4NY8dC0DIH62nezNuZN04rJZ2P419BeGXr6rXr2zd6N2/dvnO3v3PvyJnaCpwIo4w9SblDJTVOvPQKTyqLvEwVHqfLlw1//AGtk0Yf+lWFs5IvtMyl4J5S851ga6qN1Blqv56mObz6yMtK4TmMdAbGZmhhbH H1hD4Z98aCWzmPZQQHmPvn4AsEqT1aLho9WKLVqBxw6t6d2sLMD94d7j52EbyVi6JpsPw9ChKS6MDkrYC3NXa6MFSkC7RXtNeKKOSkmP2hbSPT8WfSF1REA0gvuaKszmQ7Rm5N2TxFjF4ADc5h6E21keSg8QyMRhimxntT7kXz/iCO4jbgMkg6MGBdjOf9n9PMiLok24Tizp0mceVna269FOReb1o7rLhY8gWeEtS8RDdbt+c6h0eUySAnM3Oj22WM/btjzUvnVmVKlSX3hbvINcn/cae1z5/N1lJXtUctNg/ltQJvoLk9ZNKS92pFgAtLVgkQBW9uR39Ij0xILq58GRyNoiSOkjejwf6Lzo5t9oA9ZEOWsKdsn71mYzZhIlgGn4IvwdewCj+H38Lvm9Iw6Hrus38i/PEbYeHpeA==</latexit><latexit sha1_base64="wVU8ZJ8q3r0pRZawpzxw2lVykos=">AAAC7nicbVJNb9NAEF2bAiV8pXDkMiJFpAcsOxcQ4lAJIXHoIaCmrdSEaL0ex0vWu9bumhJF/RFcOIAQV34PN/4NY8dC0DIH62nezNuZN04rJZ2P419BeGXr6rXr2zd6N2/dvnO3v3PvyJnaCpwIo4w9SblDJTVOvPQKTyqLvEwVHqfLlw1//AGtk0Yf+lWFs5IvtMyl4J5S851ga6qN1Blqv56mObz6yMtK4TmMdAbGZmhhbH H1hD4Z98aCWzmPZQQHmPvn4AsEqT1aLho9WKLVqBxw6t6d2sLMD94d7j52EbyVi6JpsPw9ChKS6MDkrYC3NXa6MFSkC7RXtNeKKOSkmP2hbSPT8WfSF1REA0gvuaKszmQ7Rm5N2TxFjF4ADc5h6E21keSg8QyMRhimxntT7kXz/iCO4jbgMkg6MGBdjOf9n9PMiLok24Tizp0mceVna269FOReb1o7rLhY8gWeEtS8RDdbt+c6h0eUySAnM3Oj22WM/btjzUvnVmVKlSX3hbvINcn/cae1z5/N1lJXtUctNg/ltQJvoLk9ZNKS92pFgAtLVgkQBW9uR39Ij0xILq58GRyNoiSOkjejwf6Lzo5t9oA9ZEOWsKdsn71mYzZhIlgGn4IvwdewCj+H38Lvm9Iw6Hrus38i/PEbYeHpeA==</latexit><latexit sha1_base64="wVU8ZJ8q3r0pRZawpzxw2lVykos=">AAAC7nicbVJNb9NAEF2bAiV8pXDkMiJFpAcsOxcQ4lAJIXHoIaCmrdSEaL0ex0vWu9bumhJF/RFcOIAQV34PN/4NY8dC0DIH62nezNuZN04rJZ2P419BeGXr6rXr2zd6N2/dvnO3v3PvyJnaCpwIo4w9SblDJTVOvPQKTyqLvEwVHqfLlw1//AGtk0Yf+lWFs5IvtMyl4J5S851ga6qN1Blqv56mObz6yMtK4TmMdAbGZmhhbH H1hD4Z98aCWzmPZQQHmPvn4AsEqT1aLho9WKLVqBxw6t6d2sLMD94d7j52EbyVi6JpsPw9ChKS6MDkrYC3NXa6MFSkC7RXtNeKKOSkmP2hbSPT8WfSF1REA0gvuaKszmQ7Rm5N2TxFjF4ADc5h6E21keSg8QyMRhimxntT7kXz/iCO4jbgMkg6MGBdjOf9n9PMiLok24Tizp0mceVna269FOReb1o7rLhY8gWeEtS8RDdbt+c6h0eUySAnM3Oj22WM/btjzUvnVmVKlSX3hbvINcn/cae1z5/N1lJXtUctNg/ltQJvoLk9ZNKS92pFgAtLVgkQBW9uR39Ij0xILq58GRyNoiSOkjejwf6Lzo5t9oA9ZEOWsKdsn71mYzZhIlgGn4IvwdewCj+H38Lvm9Iw6Hrus38i/PEbYeHpeA==</latexit><latexit sha1_base64="wVU8ZJ8q3r0pRZawpzxw2lVykos=">AAAC7nicbVJNb9NAEF2bAiV8pXDkMiJFpAcsOxcQ4lAJIXHoIaCmrdSEaL0ex0vWu9bumhJF/RFcOIAQV34PN/4NY8dC0DIH62nezNuZN04rJZ2P419BeGXr6rXr2zd6N2/dvnO3v3PvyJnaCpwIo4w9SblDJTVOvPQKTyqLvEwVHqfLlw1//AGtk0Yf+lWFs5IvtMyl4J5S851ga6qN1Blqv56mObz6yMtK4TmMdAbGZmhhbH H1hD4Z98aCWzmPZQQHmPvn4AsEqT1aLho9WKLVqBxw6t6d2sLMD94d7j52EbyVi6JpsPw9ChKS6MDkrYC3NXa6MFSkC7RXtNeKKOSkmP2hbSPT8WfSF1REA0gvuaKszmQ7Rm5N2TxFjF4ADc5h6E21keSg8QyMRhimxntT7kXz/iCO4jbgMkg6MGBdjOf9n9PMiLok24Tizp0mceVna269FOReb1o7rLhY8gWeEtS8RDdbt+c6h0eUySAnM3Oj22WM/btjzUvnVmVKlSX3hbvINcn/cae1z5/N1lJXtUctNg/ltQJvoLk9ZNKS92pFgAtLVgkQBW9uR39Ij0xILq58GRyNoiSOkjejwf6Lzo5t9oA9ZEOWsKdsn71mYzZhIlgGn4IvwdewCj+H38Lvm9Iw6Hrus38i/PEbYeHpeA==</latexit>
Examples: 2nd order systems

Example 2nd order Prey-Predator system. Left: the interaction kernels and⇢TL’s. Right: trajectories of the true system (left col.) and learned system (rightcol.) with an initial condition from training data (top) and a new one (bottom).
<latexit sha1_base64="wVU8ZJ8q3r0pRZawpzxw2lVykos=">AAAC7nicbVJNb9NAEF2bAiV8pXDkMiJFpAcsOxcQ4lAJIXHoIaCmrdSEaL0ex0vWu9bumhJF/RFcOIAQV34PN/4NY8dC0DIH62nezNuZN04rJZ2P419BeGXr6rXr2zd6N2/dvnO3v3PvyJnaCpwIo4w9SblDJTVOvPQKTyqLvEwVHqfLlw1//AGtk0Yf+lWFs5IvtMyl4J5S851ga6qN1Blqv56mObz6yMtK4TmMdAbGZmhhbH H1hD4Z98aCWzmPZQQHmPvn4AsEqT1aLho9WKLVqBxw6t6d2sLMD94d7j52EbyVi6JpsPw9ChKS6MDkrYC3NXa6MFSkC7RXtNeKKOSkmP2hbSPT8WfSF1REA0gvuaKszmQ7Rm5N2TxFjF4ADc5h6E21keSg8QyMRhimxntT7kXz/iCO4jbgMkg6MGBdjOf9n9PMiLok24Tizp0mceVna269FOReb1o7rLhY8gWeEtS8RDdbt+c6h0eUySAnM3Oj22WM/btjzUvnVmVKlSX3hbvINcn/cae1z5/N1lJXtUctNg/ltQJvoLk9ZNKS92pFgAtLVgkQBW9uR39Ij0xILq58GRyNoiSOkjejwf6Lzo5t9oA9ZEOWsKdsn71mYzZhIlgGn4IvwdewCj+H38Lvm9Iw6Hrus38i/PEbYeHpeA==</latexit><latexit sha1_base64="wVU8ZJ8q3r0pRZawpzxw2lVykos=">AAAC7nicbVJNb9NAEF2bAiV8pXDkMiJFpAcsOxcQ4lAJIXHoIaCmrdSEaL0ex0vWu9bumhJF/RFcOIAQV34PN/4NY8dC0DIH62nezNuZN04rJZ2P419BeGXr6rXr2zd6N2/dvnO3v3PvyJnaCpwIo4w9SblDJTVOvPQKTyqLvEwVHqfLlw1//AGtk0Yf+lWFs5IvtMyl4J5S851ga6qN1Blqv56mObz6yMtK4TmMdAbGZmhhbH H1hD4Z98aCWzmPZQQHmPvn4AsEqT1aLho9WKLVqBxw6t6d2sLMD94d7j52EbyVi6JpsPw9ChKS6MDkrYC3NXa6MFSkC7RXtNeKKOSkmP2hbSPT8WfSF1REA0gvuaKszmQ7Rm5N2TxFjF4ADc5h6E21keSg8QyMRhimxntT7kXz/iCO4jbgMkg6MGBdjOf9n9PMiLok24Tizp0mceVna269FOReb1o7rLhY8gWeEtS8RDdbt+c6h0eUySAnM3Oj22WM/btjzUvnVmVKlSX3hbvINcn/cae1z5/N1lJXtUctNg/ltQJvoLk9ZNKS92pFgAtLVgkQBW9uR39Ij0xILq58GRyNoiSOkjejwf6Lzo5t9oA9ZEOWsKdsn71mYzZhIlgGn4IvwdewCj+H38Lvm9Iw6Hrus38i/PEbYeHpeA==</latexit><latexit sha1_base64="wVU8ZJ8q3r0pRZawpzxw2lVykos=">AAAC7nicbVJNb9NAEF2bAiV8pXDkMiJFpAcsOxcQ4lAJIXHoIaCmrdSEaL0ex0vWu9bumhJF/RFcOIAQV34PN/4NY8dC0DIH62nezNuZN04rJZ2P419BeGXr6rXr2zd6N2/dvnO3v3PvyJnaCpwIo4w9SblDJTVOvPQKTyqLvEwVHqfLlw1//AGtk0Yf+lWFs5IvtMyl4J5S851ga6qN1Blqv56mObz6yMtK4TmMdAbGZmhhbH H1hD4Z98aCWzmPZQQHmPvn4AsEqT1aLho9WKLVqBxw6t6d2sLMD94d7j52EbyVi6JpsPw9ChKS6MDkrYC3NXa6MFSkC7RXtNeKKOSkmP2hbSPT8WfSF1REA0gvuaKszmQ7Rm5N2TxFjF4ADc5h6E21keSg8QyMRhimxntT7kXz/iCO4jbgMkg6MGBdjOf9n9PMiLok24Tizp0mceVna269FOReb1o7rLhY8gWeEtS8RDdbt+c6h0eUySAnM3Oj22WM/btjzUvnVmVKlSX3hbvINcn/cae1z5/N1lJXtUctNg/ltQJvoLk9ZNKS92pFgAtLVgkQBW9uR39Ij0xILq58GRyNoiSOkjejwf6Lzo5t9oA9ZEOWsKdsn71mYzZhIlgGn4IvwdewCj+H38Lvm9Iw6Hrus38i/PEbYeHpeA==</latexit><latexit sha1_base64="wVU8ZJ8q3r0pRZawpzxw2lVykos=">AAAC7nicbVJNb9NAEF2bAiV8pXDkMiJFpAcsOxcQ4lAJIXHoIaCmrdSEaL0ex0vWu9bumhJF/RFcOIAQV34PN/4NY8dC0DIH62nezNuZN04rJZ2P419BeGXr6rXr2zd6N2/dvnO3v3PvyJnaCpwIo4w9SblDJTVOvPQKTyqLvEwVHqfLlw1//AGtk0Yf+lWFs5IvtMyl4J5S851ga6qN1Blqv56mObz6yMtK4TmMdAbGZmhhbH H1hD4Z98aCWzmPZQQHmPvn4AsEqT1aLho9WKLVqBxw6t6d2sLMD94d7j52EbyVi6JpsPw9ChKS6MDkrYC3NXa6MFSkC7RXtNeKKOSkmP2hbSPT8WfSF1REA0gvuaKszmQ7Rm5N2TxFjF4ADc5h6E21keSg8QyMRhimxntT7kXz/iCO4jbgMkg6MGBdjOf9n9PMiLok24Tizp0mceVna269FOReb1o7rLhY8gWeEtS8RDdbt+c6h0eUySAnM3Oj22WM/btjzUvnVmVKlSX3hbvINcn/cae1z5/N1lJXtUctNg/ltQJvoLk9ZNKS92pFgAtLVgkQBW9uR39Ij0xILq58GRyNoiSOkjejwf6Lzo5t9oA9ZEOWsKdsn71mYzZhIlgGn4IvwdewCj+H38Lvm9Iw6Hrus38i/PEbYeHpeA==</latexit>
Examples: 2nd order systems

Example 2nd order Prey-Predator system. Left: the interaction kernels and⇢TL’s. Right: trajectories of the true system (left col.) and learned system (rightcol.) with an initial condition from training data (top) and a new one (bottom).
<latexit sha1_base64="wVU8ZJ8q3r0pRZawpzxw2lVykos=">AAAC7nicbVJNb9NAEF2bAiV8pXDkMiJFpAcsOxcQ4lAJIXHoIaCmrdSEaL0ex0vWu9bumhJF/RFcOIAQV34PN/4NY8dC0DIH62nezNuZN04rJZ2P419BeGXr6rXr2zd6N2/dvnO3v3PvyJnaCpwIo4w9SblDJTVOvPQKTyqLvEwVHqfLlw1//AGtk0Yf+lWFs5IvtMyl4J5S851ga6qN1Blqv56mObz6yMtK4TmMdAbGZmhhbH H1hD4Z98aCWzmPZQQHmPvn4AsEqT1aLho9WKLVqBxw6t6d2sLMD94d7j52EbyVi6JpsPw9ChKS6MDkrYC3NXa6MFSkC7RXtNeKKOSkmP2hbSPT8WfSF1REA0gvuaKszmQ7Rm5N2TxFjF4ADc5h6E21keSg8QyMRhimxntT7kXz/iCO4jbgMkg6MGBdjOf9n9PMiLok24Tizp0mceVna269FOReb1o7rLhY8gWeEtS8RDdbt+c6h0eUySAnM3Oj22WM/btjzUvnVmVKlSX3hbvINcn/cae1z5/N1lJXtUctNg/ltQJvoLk9ZNKS92pFgAtLVgkQBW9uR39Ij0xILq58GRyNoiSOkjejwf6Lzo5t9oA9ZEOWsKdsn71mYzZhIlgGn4IvwdewCj+H38Lvm9Iw6Hrus38i/PEbYeHpeA==</latexit><latexit sha1_base64="wVU8ZJ8q3r0pRZawpzxw2lVykos=">AAAC7nicbVJNb9NAEF2bAiV8pXDkMiJFpAcsOxcQ4lAJIXHoIaCmrdSEaL0ex0vWu9bumhJF/RFcOIAQV34PN/4NY8dC0DIH62nezNuZN04rJZ2P419BeGXr6rXr2zd6N2/dvnO3v3PvyJnaCpwIo4w9SblDJTVOvPQKTyqLvEwVHqfLlw1//AGtk0Yf+lWFs5IvtMyl4J5S851ga6qN1Blqv56mObz6yMtK4TmMdAbGZmhhbH H1hD4Z98aCWzmPZQQHmPvn4AsEqT1aLho9WKLVqBxw6t6d2sLMD94d7j52EbyVi6JpsPw9ChKS6MDkrYC3NXa6MFSkC7RXtNeKKOSkmP2hbSPT8WfSF1REA0gvuaKszmQ7Rm5N2TxFjF4ADc5h6E21keSg8QyMRhimxntT7kXz/iCO4jbgMkg6MGBdjOf9n9PMiLok24Tizp0mceVna269FOReb1o7rLhY8gWeEtS8RDdbt+c6h0eUySAnM3Oj22WM/btjzUvnVmVKlSX3hbvINcn/cae1z5/N1lJXtUctNg/ltQJvoLk9ZNKS92pFgAtLVgkQBW9uR39Ij0xILq58GRyNoiSOkjejwf6Lzo5t9oA9ZEOWsKdsn71mYzZhIlgGn4IvwdewCj+H38Lvm9Iw6Hrus38i/PEbYeHpeA==</latexit><latexit sha1_base64="wVU8ZJ8q3r0pRZawpzxw2lVykos=">AAAC7nicbVJNb9NAEF2bAiV8pXDkMiJFpAcsOxcQ4lAJIXHoIaCmrdSEaL0ex0vWu9bumhJF/RFcOIAQV34PN/4NY8dC0DIH62nezNuZN04rJZ2P419BeGXr6rXr2zd6N2/dvnO3v3PvyJnaCpwIo4w9SblDJTVOvPQKTyqLvEwVHqfLlw1//AGtk0Yf+lWFs5IvtMyl4J5S851ga6qN1Blqv56mObz6yMtK4TmMdAbGZmhhbH H1hD4Z98aCWzmPZQQHmPvn4AsEqT1aLho9WKLVqBxw6t6d2sLMD94d7j52EbyVi6JpsPw9ChKS6MDkrYC3NXa6MFSkC7RXtNeKKOSkmP2hbSPT8WfSF1REA0gvuaKszmQ7Rm5N2TxFjF4ADc5h6E21keSg8QyMRhimxntT7kXz/iCO4jbgMkg6MGBdjOf9n9PMiLok24Tizp0mceVna269FOReb1o7rLhY8gWeEtS8RDdbt+c6h0eUySAnM3Oj22WM/btjzUvnVmVKlSX3hbvINcn/cae1z5/N1lJXtUctNg/ltQJvoLk9ZNKS92pFgAtLVgkQBW9uR39Ij0xILq58GRyNoiSOkjejwf6Lzo5t9oA9ZEOWsKdsn71mYzZhIlgGn4IvwdewCj+H38Lvm9Iw6Hrus38i/PEbYeHpeA==</latexit><latexit sha1_base64="wVU8ZJ8q3r0pRZawpzxw2lVykos=">AAAC7nicbVJNb9NAEF2bAiV8pXDkMiJFpAcsOxcQ4lAJIXHoIaCmrdSEaL0ex0vWu9bumhJF/RFcOIAQV34PN/4NY8dC0DIH62nezNuZN04rJZ2P419BeGXr6rXr2zd6N2/dvnO3v3PvyJnaCpwIo4w9SblDJTVOvPQKTyqLvEwVHqfLlw1//AGtk0Yf+lWFs5IvtMyl4J5S851ga6qN1Blqv56mObz6yMtK4TmMdAbGZmhhbH H1hD4Z98aCWzmPZQQHmPvn4AsEqT1aLho9WKLVqBxw6t6d2sLMD94d7j52EbyVi6JpsPw9ChKS6MDkrYC3NXa6MFSkC7RXtNeKKOSkmP2hbSPT8WfSF1REA0gvuaKszmQ7Rm5N2TxFjF4ADc5h6E21keSg8QyMRhimxntT7kXz/iCO4jbgMkg6MGBdjOf9n9PMiLok24Tizp0mceVna269FOReb1o7rLhY8gWeEtS8RDdbt+c6h0eUySAnM3Oj22WM/btjzUvnVmVKlSX3hbvINcn/cae1z5/N1lJXtUctNg/ltQJvoLk9ZNKS92pFgAtLVgkQBW9uR39Ij0xILq58GRyNoiSOkjejwf6Lzo5t9oA9ZEOWsKdsn71mYzZhIlgGn4IvwdewCj+H38Lvm9Iw6Hrus38i/PEbYeHpeA==</latexit>
Examples: 2nd order systems

Testing hypotheses for agent systems
ExampleWe want to test if a 2nd order system is driven by energy or alignmentinteractions. Left: we learn a general model (with both types of interaction)on a system with only energy interaction terms: we obtain �A is u 0. Right:learning on a system with only alignment term yields �E u 0.
<latexit sha1_base64="C61abh+rqyxxQz5UmQBUDWHsH6A=">AAADQXicdVI7b9RAEF6bVzheFyhpRtwhheZkXxOEKIJQJAqKgLhcpPMRrddje5V9mN11LtYpf42Gf0BHT0MBQrQ0rJ0THAlMsRrN4/u+nZm0Ety6KPoUhJcuX7l6beN678bNW7fv9Dfv7ltdG4YTpoU2Bym1KLjCieNO4EFlkMpU4DQ9et7mp8doLNfqjWsqnEtaKJ5zRp0PHW4G00RprjJUbpmkOeyeUFkJPIUpwoIqB06DQ+ uA50BhrDLQJkMDtrEOJXALmeHHqCBtABWaovEFQAUvlPSYwJVDQ1lLZkfwEnP3BBYIAqlRHrBoe6gAqTMUsLXgroRU+6fVakHn6wCPQLc9K+quVivxm3et0ks20nZMOnWUKxgmJXVJVfK3z4at6mFCq8roE3wXDUfwmhelF9ap4qr4D8+fX7Xw0HAUmV1D3l3HPOwPolHUGVx04pUzICvbO+x/TDLN6hafCWrtLI4qN19S4zjzC+kltcWKsiNa4My7ikq082V3Aafw0EcyyP3oc+31ddH1jiWV1jYy9ZWSutKez7XBf+Vmtcsfz5dcVbVDxc6I8lp0Z+FXBBk3yJwfTsYpM9xrBVbSdg3+6Hp+CPH5L1909sejOBrFr8aDnaercWyQ++QB2SIx2SY75AXZIxPCgvfB5+Br8C38EH4Jv4c/zkrDYNVzj/xl4c9fXw0MVw==</latexit><latexit sha1_base64="C61abh+rqyxxQz5UmQBUDWHsH6A=">AAADQXicdVI7b9RAEF6bVzheFyhpRtwhheZkXxOEKIJQJAqKgLhcpPMRrddje5V9mN11LtYpf42Gf0BHT0MBQrQ0rJ0THAlMsRrN4/u+nZm0Ety6KPoUhJcuX7l6beN678bNW7fv9Dfv7ltdG4YTpoU2Bym1KLjCieNO4EFlkMpU4DQ9et7mp8doLNfqjWsqnEtaKJ5zRp0PHW4G00RprjJUbpmkOeyeUFkJPIUpwoIqB06DQ+ uA50BhrDLQJkMDtrEOJXALmeHHqCBtABWaovEFQAUvlPSYwJVDQ1lLZkfwEnP3BBYIAqlRHrBoe6gAqTMUsLXgroRU+6fVakHn6wCPQLc9K+quVivxm3et0ks20nZMOnWUKxgmJXVJVfK3z4at6mFCq8roE3wXDUfwmhelF9ap4qr4D8+fX7Xw0HAUmV1D3l3HPOwPolHUGVx04pUzICvbO+x/TDLN6hafCWrtLI4qN19S4zjzC+kltcWKsiNa4My7ikq082V3Aafw0EcyyP3oc+31ddH1jiWV1jYy9ZWSutKez7XBf+Vmtcsfz5dcVbVDxc6I8lp0Z+FXBBk3yJwfTsYpM9xrBVbSdg3+6Hp+CPH5L1909sejOBrFr8aDnaercWyQ++QB2SIx2SY75AXZIxPCgvfB5+Br8C38EH4Jv4c/zkrDYNVzj/xl4c9fXw0MVw==</latexit><latexit sha1_base64="C61abh+rqyxxQz5UmQBUDWHsH6A=">AAADQXicdVI7b9RAEF6bVzheFyhpRtwhheZkXxOEKIJQJAqKgLhcpPMRrddje5V9mN11LtYpf42Gf0BHT0MBQrQ0rJ0THAlMsRrN4/u+nZm0Ety6KPoUhJcuX7l6beN678bNW7fv9Dfv7ltdG4YTpoU2Bym1KLjCieNO4EFlkMpU4DQ9et7mp8doLNfqjWsqnEtaKJ5zRp0PHW4G00RprjJUbpmkOeyeUFkJPIUpwoIqB06DQ+ uA50BhrDLQJkMDtrEOJXALmeHHqCBtABWaovEFQAUvlPSYwJVDQ1lLZkfwEnP3BBYIAqlRHrBoe6gAqTMUsLXgroRU+6fVakHn6wCPQLc9K+quVivxm3et0ks20nZMOnWUKxgmJXVJVfK3z4at6mFCq8roE3wXDUfwmhelF9ap4qr4D8+fX7Xw0HAUmV1D3l3HPOwPolHUGVx04pUzICvbO+x/TDLN6hafCWrtLI4qN19S4zjzC+kltcWKsiNa4My7ikq082V3Aafw0EcyyP3oc+31ddH1jiWV1jYy9ZWSutKez7XBf+Vmtcsfz5dcVbVDxc6I8lp0Z+FXBBk3yJwfTsYpM9xrBVbSdg3+6Hp+CPH5L1909sejOBrFr8aDnaercWyQ++QB2SIx2SY75AXZIxPCgvfB5+Br8C38EH4Jv4c/zkrDYNVzj/xl4c9fXw0MVw==</latexit><latexit sha1_base64="C61abh+rqyxxQz5UmQBUDWHsH6A=">AAADQXicdVI7b9RAEF6bVzheFyhpRtwhheZkXxOEKIJQJAqKgLhcpPMRrddje5V9mN11LtYpf42Gf0BHT0MBQrQ0rJ0THAlMsRrN4/u+nZm0Ety6KPoUhJcuX7l6beN678bNW7fv9Dfv7ltdG4YTpoU2Bym1KLjCieNO4EFlkMpU4DQ9et7mp8doLNfqjWsqnEtaKJ5zRp0PHW4G00RprjJUbpmkOeyeUFkJPIUpwoIqB06DQ+ uA50BhrDLQJkMDtrEOJXALmeHHqCBtABWaovEFQAUvlPSYwJVDQ1lLZkfwEnP3BBYIAqlRHrBoe6gAqTMUsLXgroRU+6fVakHn6wCPQLc9K+quVivxm3et0ks20nZMOnWUKxgmJXVJVfK3z4at6mFCq8roE3wXDUfwmhelF9ap4qr4D8+fX7Xw0HAUmV1D3l3HPOwPolHUGVx04pUzICvbO+x/TDLN6hafCWrtLI4qN19S4zjzC+kltcWKsiNa4My7ikq082V3Aafw0EcyyP3oc+31ddH1jiWV1jYy9ZWSutKez7XBf+Vmtcsfz5dcVbVDxc6I8lp0Z+FXBBk3yJwfTsYpM9xrBVbSdg3+6Hp+CPH5L1909sejOBrFr8aDnaercWyQ++QB2SIx2SY75AXZIxPCgvfB5+Br8C38EH4Jv4c/zkrDYNVzj/xl4c9fXw0MVw==</latexit>
Example We want to test if a system is governed by 1st or 2nd order interac-tions. We are able to tell thedi↵erence reliably, by testingthe predictions of the learnedmodels on trajectories.
<latexit sha1_base64="m1g+b1t9Y0/XaGc+HmNGWGEzbKQ=">AAAC23icbVJNi9RAEO3Ej13j16hHL4WD4EFCMpf14GFBBI8rODsDM2HodCoz7Xa6Q3fHNYT14kERr/4xb/4Nf4GVzCDjrgVNiqpXr6peJa+VdD5JfgXhtes3bh4c3opu37l77/7owcNTZxorcCqMMnaec4dKapx66RXOa4u8yhXO8rNXfX72Aa2TRr/zbY1ZxddallJwT6HV6PdSG6kL1L5b5iW8/sirWuEFzBDOufbgDXh0Hm QJHFzrPFYgHawNkWosIG8hpbSxMNEFfQq0ILVHy0XfwMU9E7f0aKItm1LgNxhFfztDIcsSLWqBYGkTgrbPe+a+s9TrfWhfCrRhIbf8YMohpJAP8+xjK1OgIoQGb/l7FN5YiS5ejcZJnAwGV51054zZzk5Wo5/LwoimIk6huHOLNKl91nHrpSCtomXjsObijK9xQa7mFbqsG25zAU8pUkBJApWGZhqi+xUdr5xrq5yQFfcbdznXB/+XWzS+fJF1UteNJ+W2jcpGDRrToUlUSyurlhwurKRZQWx4fxf6HSISIb288lXndBKnSZy+nYyPX+7kOGSP2RP2jKXsiB2zN+yETZkI5sGn4EvwNczCz+G38PsWGga7mkfsHwt//AE0qOQ+</latexit><latexit sha1_base64="m1g+b1t9Y0/XaGc+HmNGWGEzbKQ=">AAAC23icbVJNi9RAEO3Ej13j16hHL4WD4EFCMpf14GFBBI8rODsDM2HodCoz7Xa6Q3fHNYT14kERr/4xb/4Nf4GVzCDjrgVNiqpXr6peJa+VdD5JfgXhtes3bh4c3opu37l77/7owcNTZxorcCqMMnaec4dKapx66RXOa4u8yhXO8rNXfX72Aa2TRr/zbY1ZxddallJwT6HV6PdSG6kL1L5b5iW8/sirWuEFzBDOufbgDXh0Hm QJHFzrPFYgHawNkWosIG8hpbSxMNEFfQq0ILVHy0XfwMU9E7f0aKItm1LgNxhFfztDIcsSLWqBYGkTgrbPe+a+s9TrfWhfCrRhIbf8YMohpJAP8+xjK1OgIoQGb/l7FN5YiS5ejcZJnAwGV51054zZzk5Wo5/LwoimIk6huHOLNKl91nHrpSCtomXjsObijK9xQa7mFbqsG25zAU8pUkBJApWGZhqi+xUdr5xrq5yQFfcbdznXB/+XWzS+fJF1UteNJ+W2jcpGDRrToUlUSyurlhwurKRZQWx4fxf6HSISIb288lXndBKnSZy+nYyPX+7kOGSP2RP2jKXsiB2zN+yETZkI5sGn4EvwNczCz+G38PsWGga7mkfsHwt//AE0qOQ+</latexit><latexit sha1_base64="m1g+b1t9Y0/XaGc+HmNGWGEzbKQ=">AAAC23icbVJNi9RAEO3Ej13j16hHL4WD4EFCMpf14GFBBI8rODsDM2HodCoz7Xa6Q3fHNYT14kERr/4xb/4Nf4GVzCDjrgVNiqpXr6peJa+VdD5JfgXhtes3bh4c3opu37l77/7owcNTZxorcCqMMnaec4dKapx66RXOa4u8yhXO8rNXfX72Aa2TRr/zbY1ZxddallJwT6HV6PdSG6kL1L5b5iW8/sirWuEFzBDOufbgDXh0Hm QJHFzrPFYgHawNkWosIG8hpbSxMNEFfQq0ILVHy0XfwMU9E7f0aKItm1LgNxhFfztDIcsSLWqBYGkTgrbPe+a+s9TrfWhfCrRhIbf8YMohpJAP8+xjK1OgIoQGb/l7FN5YiS5ejcZJnAwGV51054zZzk5Wo5/LwoimIk6huHOLNKl91nHrpSCtomXjsObijK9xQa7mFbqsG25zAU8pUkBJApWGZhqi+xUdr5xrq5yQFfcbdznXB/+XWzS+fJF1UteNJ+W2jcpGDRrToUlUSyurlhwurKRZQWx4fxf6HSISIb288lXndBKnSZy+nYyPX+7kOGSP2RP2jKXsiB2zN+yETZkI5sGn4EvwNczCz+G38PsWGga7mkfsHwt//AE0qOQ+</latexit><latexit sha1_base64="m1g+b1t9Y0/XaGc+HmNGWGEzbKQ=">AAAC23icbVJNi9RAEO3Ej13j16hHL4WD4EFCMpf14GFBBI8rODsDM2HodCoz7Xa6Q3fHNYT14kERr/4xb/4Nf4GVzCDjrgVNiqpXr6peJa+VdD5JfgXhtes3bh4c3opu37l77/7owcNTZxorcCqMMnaec4dKapx66RXOa4u8yhXO8rNXfX72Aa2TRr/zbY1ZxddallJwT6HV6PdSG6kL1L5b5iW8/sirWuEFzBDOufbgDXh0Hm QJHFzrPFYgHawNkWosIG8hpbSxMNEFfQq0ILVHy0XfwMU9E7f0aKItm1LgNxhFfztDIcsSLWqBYGkTgrbPe+a+s9TrfWhfCrRhIbf8YMohpJAP8+xjK1OgIoQGb/l7FN5YiS5ejcZJnAwGV51054zZzk5Wo5/LwoimIk6huHOLNKl91nHrpSCtomXjsObijK9xQa7mFbqsG25zAU8pUkBJApWGZhqi+xUdr5xrq5yQFfcbdznXB/+XWzS+fJF1UteNJ+W2jcpGDRrToUlUSyurlhwurKRZQWx4fxf6HSISIb288lXndBKnSZy+nYyPX+7kOGSP2RP2jKXsiB2zN+yETZkI5sGn4EvwNczCz+G38PsWGga7mkfsHwt//AE0qOQ+</latexit>

Emerging behaviorsOrganized collecting stable patterns at large spatial/temporal scale.
Simple, local interaction kernels can learn to complex, organized behavior.
Most of the above is ill-defined, and quotes needed a.e.
Examples include flocking of bird, milling of fish, synchronization in systems of
oscillators (neurons, frogs, ...), etc...<latexit sha1_base64="rvZNSTGr0gh2/B8wi1PrIE5JQFA=">AAADW3icbVLfaxNBEL4kamOsmio++TJYhArxTOKDPvhQEMEXsaJpC0kIc3tzyZK93evOXmgM/Sd90gf/FXEuDWpaB5b7+Gbmmx83SWE0h273R63euHHz1k7zduvO7t1799t7D47ZlV7RQDnj/GmCTEZbGgQdDJ0WnjBPDJ0k87eV/2RBnrWzX8KyoHGOU6szrTAINdmrnY2s0zYlG+Cjn6LVXykF0TWkgrZT4ICiBQWGQN4yYA CDfkrAQmk0LwLlhfNogBUailutv4KfdV4Y6oBx4gJtRQFVVRfmokWGQaEFQ+gtBCdVq/DzDrg/jSQ0w4V2fkv2g+MALoMwI8DELQg0gzbmeUqZrCHtANoUzkoXiMESpSKE8XZr786xKiZ5VpkyJcikyXk1sAgn2otILpIbItM86wAvrZp5J52tlyepQrHMz1WMYyUJGJxnOLBUSiB3IPNuKp84jp91gIISMGnvd+Pu2uA66G3AfrSxo0n72yh1qsylb2WQedjrFmG8Qh+0MnTRGpVMBao5Tmko0GJOPF6tb+MCngqTQua8PJl7zf6bscKceZknEpljmPFVX0X+zzcsQ/Z6vNK2KANZdVkoK031I6tDg1R7OSGzFIDKa+kV1AyrA5BzbMkSeldHvg6O+3HvZdz/1N8/fLNZRzN6HD2JDqJe9Co6jN5HR9EgUrXvtV/1nXqz/rPRaLQau5eh9dom52G0ZY1HvwFIOxBR</latexit>
In general di�cult to characterize and predict; however if robust, we may hopeto recover them with systems driven by estimated interaction kernels.
<latexit sha1_base64="QVo14/EGvNGK7/ItHC5slFu9Gjg=">AAACinicbVFNixNBEO0ZP3aNq0Y9eikMggcNMxFcZT0s6EFvK5jdhSSEnp6apEl/DN01G8awP8a/5M1/Y002oO5a0PB49apf9euiNjpSlv1K0lu379zd27/Xu3/w4OGj/uMnp9E3QeFYeePDeSEjGu1wTJoMntcBpS0MnhWrj13/7AJD1N59o7bGmZULpyutJDE17/+YOq9diY7gi4MFOgzSQKkrljSGgDyopQxSEQb9HUG6Et ig1IqOYOnXyJeDrgCCL5pIr2CNYGXLrRq74YDKdxJaooW1piXENhLaCGXQF+igaAEjaSsJS9CObdiLV4MVBocmDuf9QTbMtgU3Qb4DA7Grk3n/57T0qrH8JmVkjJM8q2m2kYG0MnjZmzYRa6lWcoEThk5ajLPNNspLeMFMCZUPfDiTLfv3xEbaGFtbsJJXXsbrvY78X2/SUPVuttGubgidujKqGtNl1P0LR85RkWkZSBU07/on+NjjEPLrT74JTkfD/M1w9HU0OP6wi2NfPBPPxUuRi0NxLD6LEzEWKtlLXidvk8P0IB2l79OjK2ma7Gaein8q/fQbVBLF3g==</latexit>
BBC Blue PlanetFelix Munoz, https://www.youtube.com/watch?v=OxYn3e_imhA
Ming Zhong, Jason Miller

Emerging behaviors: flocking
(*) F. Cucker, J. G. Dong,Avoiding collisions in flocks,IEEE Transactions onAutomatic Control, 2010.
<latexit sha1_base64="PoOe9utUW21xkDXZcHGsz/dOMmM=">AAACg3icbVFda9swFJXdtcu8dUvXx71cFjbaLni2V1hfCh1Z+vWUQdMW4hBkWXZEZMlIciCE/JH9rL3t30xOA12TXhAc7j333Ktzk5IzbYLgr+Nuvdjeedl45b1+s/v2XXPv/a2WlSK0TySX6j7BmnImaN8ww+l9qSguEk7vkkmnrt9NqdJMihszK+mwwLlgGSPY2NSo+TsWkomUCgMHR4dw7kOnIhOq2nDtw4UPP6XI2xDH3iPvx1SylIkc7HS7oZXRwARkXJKJXuNedbtduFFYaEzMkinFmlplZGGXIdCRwijJ2xAFYeB73qjZCvxgGbAJwhVooVX0Rs0/cSpJVVhZwrHWgzAozXCOlVXndOHFlaYlJhOc04GFAhdUD+dLDxfwyWZSyKSyz661zP7fMceF1rMisUy77liv1+rkc7VBZbKT4ZyJsjJUkIdBWcXBSKgPAilTlBg+swATxWonyBgr65c9W21CuP7lTXAb+eE3P/oVtc7aKzsa6AP6iA5QiL6jM3SJeqiPiIOcz85XJ3C33S9u5B4/UF1n1bOPnoR7+g/aurzr</latexit>
The governing equations of Cucker-Dong (*) dynamics are,
xi = �bi(t)xi +
NX
i0=1
⇥ai,i0(x)(xi0 � xi) + f(||xi � xi0 ||2)(xi0 � xi)
⇤.
Here ai,i0(x) = H(1 + ||xi0 � xi||2)��; bi : [0,1) ! [0,1) is a bounded and
uniformly continuous damping function, and f : (�,1) ! [0,1) is a non-
increasing C1repulsion function integrable at +1.
<latexit sha1_base64="UQiCSNS+I3ghuAi2h+Tv7TFdPpk=">AAAEGXicbVNLb9NAEHYTHiU82sKRy4ga1aFJiMMBVKhUqRx6QkXqS4qTaL1eJ6vau2YfiMjx3+DCX+HCAYQ4wol/wzgNkDRdydLsPL7xzPdtmCVcm3b790qleu36jZurt2q379y9t7a+cf9ES6soO6YykeosJJolXLBjw03CzjLFSBom7DQ83y/jp++Z0lyKIzPOWC8lQ8FjTolB12Cj8jQQkouICQNHIwZDidmCiyGwd3aao0 HGsG/pOVPN1xID3pM6RGNBUk41EMUaNdetBTolepQHUSRNHoQxfIBiwGEXmuGAe6YeLPq3IdA2HeR8a9cv+m8gCPmwS/DeAL5VeH8z695CHaYX0IRFrDqCxd5kMofehIWSyaTfqXuXUeYQyu69oNEqykkOmGLgXvEvOEx+UOSejw3n2i3BTdv182YQMkOKwn0JLu5gp9tuBFzEZlwPjIT/Nxc4rhFCaZGFCIiIwCJDUqXJGKgUhgsrrYaIpFnJS2wFLXlpTFPdeAd3xBJD5tCXwIUUTS4oCkOXEG6QEjOiJMn3i77vAiiW2aTUyD904MKwoSKoIyAG3O0LQLc1WN9st9rTA8uGPzM2ndk5HKz/RL6oTVFhNCFad/12Zno5UYbThBW1wGqWEXpOhqyLJuqK6V4+VXYBj9ETAS4DP1To1DtfkZNU63EaYmY5kr4cK51XxbrWxC96OReZNUzQi0axTQCpKZ8JRFwxapCBiBOqOP4r0BFRhBp8TDVcgn955GXjpNPyn7U6bzube69m61h1HjqPHM/xnefOnnPgHDrHDq18rHyufK18q36qfql+r/64SK2szGoeOAun+usPmj1Mdw==</latexit>

Emerging behaviors: Fish mill patternsThe governing equations of fish milling dynamics in R2 of (*) are
mixi = ↵xi � �||xi||2xi � ~rUi ,
with Ui a potential for the interaction of the ith agent with the other agents:Ui =
PNi0=1(�Cae�||xi�xi0 ||/`a + Cre�||xi�xi0 ||/`r ).
<latexit sha1_base64="nbhEUzUi2hLgdTu1s9dZu8XxXTY=">AAADpXicnVJNbxMxEN0mfJTloy0cuYzaRW2hDUk4gBCVKvXSC6itmrZSNll5HW/WqtdebG8h8vqX8S+48W+wNxEiLSfmYI3fvBnPm3FaMqp0t/trpdW+d//Bw9VH4eMnT5+trW88v1CikpgMsGBCXqVIEUY5GWiqGbkqJUFFyshlen3k45c3RCoq+LmelWRUoCmnGcVIOyjZWPkRc0H5hHAN5zmBqXBsTvkUyNeq4SgQGWRU5V BQxnxkMuOooFgB5RDFBdJ5mpozO+5HnrrzeheQJGE8DIuExpOJ0CZOM/gONqFwADFiZY7iZXgf4pRoVNfLeF2P+3eZNwSbmKOUITtwL+zthfEo/EZ1DpG7R4CgFNoJoohBJiRop4tyTSTCXpBv0kMRHRudW8efevVNAY8Ld8g5qD6GUTiYt62qIjF0+6Bnx19gZ/8oMcg24mVhiB2bfVPXS33+ubgsW9f2rYkJYz7NWngDroD8vwLSFdgNo06YrG91O93G4K7TWzhbwcJOkvWfbpq4Kpw0zJBSw1631CODpKaYERvGlSIlwtdO/NC5bs1EjUzzyyy8csikGWgm3Lwa9O8MgwqlZkXqmF6Vuh3z4L9iw0pnH0aG8rJyW8Pzh7KKgRbgvyxMqCRYs5lzEJbU9Qo4R36b7mP7IfRuS77rXPQ7vXed/ml/6/DTYhyrwctgM9gJesH74DA4Dk6CQYBbm63j1mnrrL3d/tw+b1/Mqa2VRc6LYMnayW+q/ihI</latexit>
(*) Y. Li Chuang, M. R. D’Orsogna,
D. Marthaler, A. L. Bertozzi, L. S.
Chayes, Physica D: Nonlinear Phe-
nomena 232 (2007)<latexit sha1_base64="MWbgJViP+MoRi1wOdzvoErF1cn8=">AAADQXicfVJLb9QwEJ6EVwmPLnBCXCxWSIDKKkkPIE6F7YEDhfLYtmh3VTle765Vx45sByms+o/4DVz4B9y4c+EAQly5MPbmAG3Blscz880340ymqKSwLk0/R/Gp02fOnls5n1y4eOnyaufK1R2ra8P4gGmpzV5BLZdC8YETTvK9ynBaFpLvFgd9j+++5cYKrV67puLjks6UmApGHbp05z2MQIEGgXICHKUDArfhLtzB+w30UD5FlEAf5lADxYgZrKG9FbCXQW6S6/AcDFjMNMMIGiJGuJMT828G1hbGGbTneEvETGA9amt6+Th4HfLf4RYBXyKvgvx3hX7I2qBtA2sb7QZ1AQz9/gUPUT5DnsLansvDa5aRHO79J7f3lMHymXJYx+N7lkOK+z52LoFkv9NNe2lY5LiStUoX2rW93/k0mmhWl1w5Jqm1wyyt3HhBjRNM8sNkVFteUXZAZ3yIqqIlt+NFmIBDcgs9EzLVBo9yJHj/ZCxoaW1TFhhZUje3RzHvPAkb1m76YLwQqqodV2xZaFpL4jTx40QmwnDmZIMKZUbgWwmbU0OZw6HzTciOfvJxZSfvZeu9/EXe3Vhr27ECN+AmtjTDdm7AE/wpA2DRh+hL9C36Hn+Mv8Y/4p/L0DhqOdfgrxX/+g1Z/8YO</latexit>

Parametrized Interaction KernelsWe consider the 5 innermost planets and the Sun in our solar system, movingaccording to Newton’s law:
xi(t) =NX
i0=1
Gmi0
||xi0 � xi||3(xi0 � xi) ,
where mi are the unknown masses, and G is the known gravitational constant.<latexit sha1_base64="Ta92GLr1D++PxY5P2xEcM33mTcI=">AAADOXicdVJLb9NAELbNq4RXC0cuIxLUVgpR0gqBEJUqcSinUgRtKtVptFlPklX2Ye2OGyLHf4sL/4IbEhcOIMSVP8DaDa8WRrL17fft7M58s4NUCkft9ocwunDx0uUrS1dr167fuHlreeX2gTOZ5bjPjTT2cMAcSqFxnwRJPEwtMjWQ2B1MnpV69wStE0a/plmKPcVGWgwFZ+Sp/kr4ItZG6AQ1QReBG+1EghZojNB42AChNV plHEEqmUZywHRSqa8y7VXwhYAzkvn/zBGqJihzIvQIGOfGJiUiA7s4JaNXHUg2fVJrNGqxU8yN8zhJDOXxYAhvir5Yo3XYgthlqp+L1a1OcbwL8dAynu/EJGSCuSpKpSjy+fxnVrmGB/DrkPn8eLNY+5+6XsTNZlnAdIzWt/j7XNEA5pmytUxPtJlq8CU6dM2q5caON8NV8qk4suxEUGUjk5VxxDS1+sv1dqtdBZwHnQWoB4vY6y+/jxPDM+UnwKW/8KjTTqmXM0uCSyxqceYwZXzCRnjkoWYKXS+vJl/Afc8kMDTWf36CFftnRs6UczM18DsVo7E7q5Xkv7SjjIaPe7nQaUao+elFw0yWsyyfESTCIic584BxK3ytwMfMj4r8Y6t5EzpnWz4PDjZanc3WxsuN+vbThR1Lwd3gXrAWdIJHwXbwPNgL9gMevg0/hp/DL9G76FP0Nfp2ujUKFzl3gr8i+v4DU4AHCQ==</latexit>
We do not know that the agents follow a common law, modulo parameters(mass), so we treat all of them as being of di↵erent type, with interactions �ii0 .
<latexit sha1_base64="3EL0Ygx2m7pf8cxxF3h7Ns7IFG0=">AAAClHicbVDLattAFB2pr9R9xGmhm24udUpTMEZyF8kiC5dQ6KqkUMcB25ir0cgaPA8xM4oxwl/Uv+muf9Mrx4s26YUZDue+zj1ZpaQPSfI7ih88fPT4ycHTzrPnL14edo9eXXlbOy7G3CrrrjP0QkkjxkEGJa4rJ1BnSkyy1UWbn9wI56U1P8KmEnONSyMLyTEQtej+nBkrTS5MgImA3IKxAVbGriGUGOgTgEvKeiisUkQjcK u1NaBw3Qdt81pZqNChFoH2wIlG7z/2wVtYCwikJQAqBbZoh2lAD5mQZtkSuSwK4drdrbQ+rGUoQRqag7yV5+F4VpVy0Uj5YXs8WHR7ySDZBdwH6R702D4uF91fs9zyWtMGrkjWNE2qMG/QBcmV2HZmtRcV8hVdOCVo6AY/b3ambuE9MTld7eiRwh37d0eD2vuNzqhSYyj93VxL/i83rUNxNm+kqeogDL9dVNQKgt3ZQK44wYPaEEDuJGkFXmJrCfnbIRPSuyffB1fDQfppMPw+7I3O93YcsLfsHTthKTtlI/aVXbIx49FRdBqNos/xm/g8voi/3JbG0b7nNfsn4m9/AMxRx60=</latexit>
We will then discover the relationships between these interaction kernels, namelythat they are all multiple of 1/r3, and the multiple is mass.
<latexit sha1_base64="AYV+RDqG6dnESzL8LPknqdTrdsg=">AAAChXicbVFLb9NAEF6bR0t4hXLkMiJF6qEEO0XQAxKVuHAsEmkqJSEar8fNKvuwdtdUUdR/wq/ixr9h7EYIWkZaaXa+b17fFLVWIWbZryS9c/fe/Z3dB72Hjx4/edp/tncWXOMljaXTzp8XGEgrS+Oooqbz2hOaQtOkWH1q8cl38kE5+zWua5obvLCqUhIjhxb9HzPrlC3JRpgQXCqtIS7JQqmCdJzY/sCT7uhhqeoABcVLYg ojgUDZSB5lC8OKvCUdDsGiIb1mBsaWtgb0BMi1TaOjqjWBq2A/f+O/He0fAtqya/MHVAEMhjBc9AfZMOsMbjv51hmIrZ0u+j9npZON4XWk5grTPKvjfIM+KqnpqjdrAtUoV3hBU3bbMcN806l4Ba84UkLlPD+Wo4v+nbFBE8LaFMw0GJfhJtYG/4dNm1gdzzfK1k0kK68bVQ0L7aA9CWvtSUbWq1QoveJZQS6xFZUP12MR8psr33bORsP8aDj6MhqcfNjKsSteiJfiQOTivTgRn8WpGAuZpMlBkiejdCd9nb5N311T02Sb81z8Y+nH39LvwoY=</latexit>

Discovering the parameters
We are able to estimateto identify, in a fullynonparametric fashion,1/r3.
<latexit sha1_base64="ghEVuPrmfX4zOxXAM2X2rHS3wks=">AAACaHicbVHBShxBEO2ZaDSrScYYEfHSuAZykM2MCnrIQcglRwXXFXbWpaenxi3s6R66e4RlEf/Rmx+QS74iNeuCrqag4PHqVVfV66xS6HwcPwbhu4XF90vLH1orqx8/fY7Wvlw4U1sJXWmUsZeZcKBQQ9ejV3BZWRBlpqCX3fxq6r1bsA6NPvfjCgaluNZYoBSeqGF0n2qDOgfteQ+4sJTUyr3h4DyWwkOatp41xGMDsBjvcdRc8KJWasznRNroSlhRgrcoeSHciEbtzWt2kx/26mC3M4zacSeeBn8Lkhlos1mcDqOHNDeyLukRqYRz/SSu/GAirEep4K6V1g4qIW/ENfQJalrDDSZTo+74N2JyXhhLSUtM2ZcdE1E6Ny4zUtLpI/e61pD/q/VrXxwPJqir2oOWT4PImcavxnWeowXpyagchbRIu3I5Io+kp79pkQnJ65Pfgov9TnLYOTzbb5/8nNmxzLbZDvvOEnbETthvdsq6TLI/wUrwNdgI/oZRuBluPUnDYNazzuYi3PkHzdS3rw==</latexit>
50 100 150 200
10-7
10-6
10-5
50 100 150 200
10-7
10-6
10-5
We also estimate masses quite accurately.
<latexit sha1_base64="+F944b+prYHzPJZs/dDdO6tfALI=">AAACHHicbVDLSgMxFM34rPU16tJNsAiuykwV7MJFwY3LCvYB7VAymds2NJOMSUYYSj/Ejb/ixoUiblwI/o1pOwttPRA4Ofd9woQzbTzv21lZXVvf2CxsFbd3dvf23YPDppapotCgkkvVDokGzgQ0DDMc2okCEoccWuHoehpvPYDSTIo7kyUQxGQgWJ9RYqzUc8+7QjIRgTC4BZhwLTFow2JiAMdEa9D4PmX2QyhNlVV5Vu65Ja/szYCXiZ+TEspR77mf3UjSNLZTKLdNO76XmGBMlGGUw6TYTTUkhI7IADqWChKDDsaz4yb41CoR7ktln91ypv6uGJNY6ywObabdeqgXY1Pxv1gnNf1qMGYiSQ0IOh/UTzk2Ek+dwhFTQA3PLCFUMbsrpkOiCDXWz6I1wV88eZk0K2X/oly9rZRqV7kdBXSMTtAZ8tElqqEbVEcNRNEjekav6M15cl6cd+djnrri5DVH6A+crx8V3KH9</latexit>

Gravity KernelsEstimated interaction kernels between Sun, Mercury, Venus, Earth and Mars,�ii0 , as a function of pairwise distance.
<latexit sha1_base64="z9mJuRMJ3bMJTon+ARP+oa3H+z8=">AAACc3icbVFNa9tAEF2pX6n75abQSw4dYpf24BjJPSSHHgIl0EsgpbUTsIwZrUbR4tVK7EeCEf4D+Xm59V/00ntXtg9t0oGFt29mdue9SWspjI2in0H44OGjx092nnaePX/x8lX39e7EVE5zGvNKVvoiRUNSKBpbYSVd1JqwTCWdp4svbf78irQRlfphlzXNSrxUIhccrafm3ZtEVUJlpCycGCtKtJSBUJY08rYCFqQVSQMp2WsiBd+dGsApae70cgATUs4M4AS1LQBVBqeo/b2fFGiTuhDzRogPq/4A0ABC7tTm0SqHGoW+FoYg8yJRcRrOu71oGK0D7oN4C3psG2fz7m2SVdyVfngu0ZhpHNV21vhZBJe06iTOUI18gZc09VBhSWbWrD1bwXvPZJBX2h8vfs3+3dFgacyyTH2lN6Uwd3Mt+b/c1Nn8aNYIVTtLim8+yp0EW0G7AK9XE7dy6QFyLfyswAts7fZr6ngT4ruS74PJaBh/Go6+jXrHn7d27LA9ts8+spgdsmP2lZ2xMePsV/A2eBdA8DvcC/fD/qY0DLY9b9g/ER78AfHrvOo=</latexit>
Sun
Mercury
Venus
Earth
Mars
Sun Mercury Venus Earth Mars

Gravity Kernels - cleanedEstimated interaction kernels between Sun, Mercury, Venus, Earth and Mars,�ii0 , as a function of pairwise distance.
<latexit sha1_base64="z9mJuRMJ3bMJTon+ARP+oa3H+z8=">AAACc3icbVFNa9tAEF2pX6n75abQSw4dYpf24BjJPSSHHgIl0EsgpbUTsIwZrUbR4tVK7EeCEf4D+Xm59V/00ntXtg9t0oGFt29mdue9SWspjI2in0H44OGjx092nnaePX/x8lX39e7EVE5zGvNKVvoiRUNSKBpbYSVd1JqwTCWdp4svbf78irQRlfphlzXNSrxUIhccrafm3ZtEVUJlpCycGCtKtJSBUJY08rYCFqQVSQMp2WsiBd+dGsApae70cgATUs4M4AS1LQBVBqeo/b2fFGiTuhDzRogPq/4A0ABC7tTm0SqHGoW+FoYg8yJRcRrOu71oGK0D7oN4C3psG2fz7m2SVdyVfngu0ZhpHNV21vhZBJe06iTOUI18gZc09VBhSWbWrD1bwXvPZJBX2h8vfs3+3dFgacyyTH2lN6Uwd3Mt+b/c1Nn8aNYIVTtLim8+yp0EW0G7AK9XE7dy6QFyLfyswAts7fZr6ngT4ruS74PJaBh/Go6+jXrHn7d27LA9ts8+spgdsmP2lZ2xMePsV/A2eBdA8DvcC/fD/qY0DLY9b9g/ER78AfHrvOo=</latexit>
Sun Mercury Venus Earth Mars
Sun
Mercury
Venus
Earth
Mars

Trajectories from gravity kernelsTrajectory predictions are accurate (relative errors O(10�4) with M = 500and daily observations for about 6 months), exhibit stability, and approximateenergy conservation.
<latexit sha1_base64="85zyjkya4kNrXjK7olq7MGaZkN4=">AAACqHicbVHbbtNAEF2bWwmXBnjkZURcKUUlsqvS9gGkSrwgIUSQkqYoCdF4PU6Wrnet3XWoFeXb+Afe+Bs2FyRomaejMzNnZs6kpRTWxfGvILx1+87dezv3Gw8ePnq823zy9NzqynDqcy21uUjRkhSK+k44SRelISxSSYP08t0qP5iTsUKrnqtLGhc4VSIXHJ2nJs0fI6WFykg56Bn8RtxpU4OXyARfVVhAQwDIeWXQEbQNSd 86JyBjtLEQfWon8dfFq6PlfgTfhZtB9PHt6ziOAFUGGQpZg04tmTlu9HJtAFNdOYiOIyi0cjO7fwB0NROpcGAdpkIKVx+sBbAsjb4SxWo2KTLTGrhX+SPXmTRbcSdeB9wEyRa02Da6k+bPUaZ5VfiLuURrh0lcuvECjRNc0rIxqiyVyC9xSkMPFRZkx4u10UvY80y2viD3e8Oa/btjgYW1dZH6Sr/xzF7Prcj/5YaVy0/HC6HKypHim0F5JcFpWH0NMmH8a7yVmUBuhN8V+AwNcud/2/AmJNdPvgnODzvJUef082Hr7M3Wjh32nL1gbZawE3bG3rMu6zMe7AUfgl7QD1+G3XAQftmUhsG25xn7J8L0N5MAzyg=</latexit>

Trajectories from gravity kernelsTrajectory predictions are accurate (relative errors O(10�4) with M = 500and daily observations for about 6 months), exhibit stability, and approximateenergy conservation.
<latexit sha1_base64="85zyjkya4kNrXjK7olq7MGaZkN4=">AAACqHicbVHbbtNAEF2bWwmXBnjkZURcKUUlsqvS9gGkSrwgIUSQkqYoCdF4PU6Wrnet3XWoFeXb+Afe+Bs2FyRomaejMzNnZs6kpRTWxfGvILx1+87dezv3Gw8ePnq823zy9NzqynDqcy21uUjRkhSK+k44SRelISxSSYP08t0qP5iTsUKrnqtLGhc4VSIXHJ2nJs0fI6WFykg56Bn8RtxpU4OXyARfVVhAQwDIeWXQEbQNSd 86JyBjtLEQfWon8dfFq6PlfgTfhZtB9PHt6ziOAFUGGQpZg04tmTlu9HJtAFNdOYiOIyi0cjO7fwB0NROpcGAdpkIKVx+sBbAsjb4SxWo2KTLTGrhX+SPXmTRbcSdeB9wEyRa02Da6k+bPUaZ5VfiLuURrh0lcuvECjRNc0rIxqiyVyC9xSkMPFRZkx4u10UvY80y2viD3e8Oa/btjgYW1dZH6Sr/xzF7Prcj/5YaVy0/HC6HKypHim0F5JcFpWH0NMmH8a7yVmUBuhN8V+AwNcud/2/AmJNdPvgnODzvJUef082Hr7M3Wjh32nL1gbZawE3bG3rMu6zMe7AUfgl7QD1+G3XAQftmUhsG25xn7J8L0N5MAzyg=</latexit>

Trajectory of Earth and its Moon

Trajectories for inner Solar System

Conclusions
10/2/13 10:30 AM
Page 1 of 1http://upload.wikimedia.org/wikipedia/commons/1/1c/Air_Force_Research_Laboratory.svg
AFOSR NSF
Nonparametric inference of interaction laws in systems of agents from trajectory data, P.N.A.S., F. Lu, S. Tang, M. Zhong, MM, July 2019.
Data-driven Discovery of Emergent Behaviors in Collective Dynamics, MM, J.Miller, M. Zhong, arXiV 1912.11123, submitted.
Learning interaction kernels in heterogeneous systems of agents from multiple trajectories, F. Lu, MM, S. Tang, ArXiv 1910.04832, submitted.
· Learning agent-based type system may be performed e�ciently, nonparametri-
cally, at least in special cases, notwithstanding the high-dimensional state space.
· Important generalizations: 1st- and 2nd-order, multi-type; more general inter-
action kernels.
· Hypothesis testing; transfer learning; dictionary learning for dynamical sys-
tems.
· Many open problems. E.g.: quantifying information needed for learning;
stochasticity; hidden variables; general interaction kernels; ...
· Many applications: biological systems, particle systems, learning forces in
molecular systems, ...
<latexit sha1_base64="RbY2nxAbnvCfYoFArC9riSHr4kg=">AAAEgnicfVNtaxNBEL4mUWt8a/WjXwbTgkhz5mpBafqhIEIFhQr2BZpQNntzydK93XN3rnKG/g9/l9/8NTqbXm1to/flhnl7nnlmdlRo5anX+7nQaLZu3b6zeLd97/6Dh4+Wlh/ve1s6iXvSausOR8KjVgb3SJHGw8KhyEcaD0Ynb0P84BSdV9Z8pqrAYS7GRmVKCmLX8XLje3tgrDIpGoKVgUwtrcAHFM4oMwYxZnc39E8hVI OvPGEOuahghFCgy6zLOYgZt1ScrKs1MNYUwokcyTGODi5BoFF4AmXAFyiV0CC5rQ/Z9FXRxJMwacCkCcJEjSfdVOVoAnHO5SgxeiEkxu05jN/nhXXcgYAZoxNafZsN6Dch8dQF7g3rJu1al6Jbg7zUpLphoj7k1uFFFdMj/stQCifoDGo/F2+nKiwT9coDoSfm3QdywvgMXZh0Jl8fUjVrJVz1xwmsGKSVEXnQphZ0PshHYSqwBRoonOWFchq8i8fxJnwpeVSVVaGfMmEHs2nBIKa8jQBxScKTlRPWnhdEVZ+1TRkFToVTgpv6/v+G70Mc/5ubKPhE5YXQI8XXNr461RrwHTCuxkvPVR0k+nAQudUoSy3cZRajHi91enFv9sFNI6mNTlR/u8dLPwaplSUfDUktvD9KegUNpzWDs/ag9MgHdMJHfcQmbwD9cDp7QmewWvpauMzymDPv1YqpyL2v8hFnstYTfz0WnPNiRyVlb4ZTZYqS0MhzoKzUQPb8RaXKoeRnw4aQTjFX4G2FNfCrbbMIyfWRbxr763GyEW98Wu9sb9VyLEZPo2fR8yiJXkfb0U60G+1FsvGrudqMmy9brdaLVtJ6dZ7aWKhrnkR/fa2t33xkfS8=</latexit>
https://pages.jh.edu/~mzhong5/LearningDynamics.htmlCode on github; examples and movies: