Embed Size (px)
Citation preview

Copyright © 2012 Tech Science Press CMES, vol.83, no.3, pp.249-273, 2012
Large Rotation Analyses of Plate/Shell Structures Basedon the Primal Variational Principle and a Fully Nonlinear
Theory in the Updated Lagrangian Co-RotationalReference Frame
Y.C. Cai1 and S.N. Atluri2
Abstract: This paper presents a very simple finite element method for geometri-cally nonlinear large rotation analyses of plate/shell structures comprising of thinmembers. A fully nonlinear theory of deformation is employed in the updated La-grangian reference frame of each plate element, to account for bending, stretchingand torsion of each element. An assumed displacement approach, based on theDiscrete Kirchhoff Theory (DKT) over each element, is employed to derive an ex-plicit expression for the (18x18) symmetric tangent stiffness matrix of the plateelement in the co-rotational reference frame. The finite rotation of the updatedLagrangian reference frame relative to a globally fixed Cartesian frame, is simplydetermined from the finite displacement vectors of the nodes of the 3-node elementin the global reference frame. The element employed here is a 3-node plate ele-ment with 6 degrees of freedom per node, including 1 drilling degree of freedomand 5 degrees of freedom [3 displacements, and the derivatives of the transversedisplacement around two independent axes]. The present (18×18) symmetric tan-gent stiffness matrices of the plate, based on the primal variational principle and thefully nonlinear plate theory in the updated Lagrangian reference frame, are muchsimpler than those of many others in the literature for large rotation/deformationanalysis of plate/shell structures. Numerical examples demonstrate the accuracyand robustness of the present method.
Keywords: large deformation, thin plate/shell, Discrete Kirchhoff Theory (DKT),updated Lagrangian formulation, Primal principle.
1 Key Laboratory of Geotechnical and Underground Engineering of Ministry of Education, Depart-ment of Geotechnical Engineering, Tongji University, Shanghai 200092, P.R.China.
2 Center for Aerospace Research & Education, University of California, Irvine

250 Copyright © 2012 Tech Science Press CMES, vol.83, no.3, pp.249-273, 2012
1 Introduction
Exact and efficient nonlinear large deformation analyses of space structures havesignificance in diverse engineering applications, such as civil and aerospace en-gineering. Over the past 3 decades, many different methods were developed bynumerous researchers for the linear and nonlinear analyses of 3D plate/shell struc-tures. For example, Kang, Zhang and Wang (2009), Kulikov and Plotnikova (2008),Nguyen-Van, Mai-Duy and Tran-Cong (2007) developed several displacement plate-/shell elements based on the Kirchhoff or Mindlin theories. Chin and Zhang (1994),Choo, Choi and Lee (2010), Huang, Shenoy and Atluri (1994), Maunder and Moit-inho (2005) proposed some hybrid plate element based on assumed strain distribu-tions or hybrid principles. Iura and Atluri (1992) employed the drilling degrees offreedom in plate/shell elements to avoid the problem of singularity in the stiffnessmatrix. Iura and Atluri (2003), Gal and Levy (2006), Rajendran and Narasimhan(2006), Wu, Chiu and Wang (2008) overviewed some progress of the plate analy-ses. Albuquerque and Aliabadi (2008), Baiz and Aliabadi (2006), Fedelinski andGorski (2006) developed the boundary element formulations for the analyses ofplates or shells. Atluri and his co-workers (Atluri 1980; Atluri and Cazzani 1994;Atluri 2005) extensively studied the large rotations in plates and shells, and atten-dant variational principles involving the rotation tensor as a direct variable. Thesediverse theories and methods of the plate/shell have now been widely applied to avariety of problems.
Although a large number of different efforts have been made, some inherent diffi-culties related to the linear/nonlinear analyses of 3D plate/shell structures still needto be further overcome. The objective of this paper is to provide an essentially ele-mentary engineering treatment of plates and shells undergoing large deformationsand rotations without resorting to the highly mathematical tools of differential ge-ometry, and group –theoretical treatment of finite rotations, as in most of the priorliterature. This paper presents a simple finite element method for large deforma-tion/large rotation analyses of plate/shell structures comprising of thin members. Afully nonlinear theory of deformation is employed in the updated Lagrangian refer-ence frame of each plate element, to account for bending, stretching, and torsion ofeach element. An assumed displacement approach, based on the Discrete KirchhoffTheory (DKT) over each element, is employed to derive an explicit expression forthe (18x18) symmetric tangent stiffness matrix of the plate element in the updatedLagrangian reference frame. Numerical examples demonstrate the accuracy androbustness of the present method.

Large Rotation Analyses of Plate/Shell Structures 251
2 A fully nonlinear theory for a plate undergoing moderately large deforma-tions in the updated Lagrangian reference frame
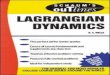
We consider a fixed global reference frame with axes xi (i = 1,2,3) and base vec-tors ei. The plate in its undeformed state, with local coordinates xi (i = 1,2,3) andbase vectors ei, is located arbitrarily in space, as shown in Fig.1. The current con-figuration of the plate, after arbitrarily large deformations, is also shown in Fig.1.The local coordinates in the reference frame in the current configuration are xi andthe base vectors are ei (i = 1,2,3).
3
configuration are ix and the base vectors are ( )3,2,1=iie .
11, ex
Von Karman nonlinear strains in rotated reference frame ei
1
2Undeformed element
Initial configuration
Current configuration
22 , ex
33 , ex
u1u2
3
22~,~ ex
33~,~ ex
1
2
3
x 3, e 3
x2, e2
x1, e1
u3
11~,~ ex
12 θ
22 θ
32θ
2 u10
2u30
2 u20
3
1
2
Incremental deformation from the current configuration
Fig.1 Updated Lagrangian reference frame for a plate element
Current configuration
23
x3, u3
x2, u2
x1, u1
1h
3θ
1θ2θ
Fig.2 Large deformation analysis model of a plate element
As shown in Fig.2, we consider the large deformations of a typical thin plate. A fully nonlinear theory (retaining all the nonlinear terms in the relations between the incremental strains and incremental displacements) of deformation is assumed for the continued deformation from the current configuration, in the
Figure 1: Updated Lagrangian reference frame for a plate element
As shown in Fig.2, we consider the large deformations of a typical thin plate. Afully nonlinear theory (retaining all the nonlinear terms in the relations betweenthe incremental strains and incremental displacements) of deformation is assumedfor the continued deformation from the current configuration, in the updated La-grangian frame of reference ei (i = 1,2,3) in the local coordinates xi (i = 1,2,3).If h is the characteristic thickness of the thin plate, and ui (x j) are the displace-ments of the plate from the current configuration in the ei directions, the precise

252 Copyright © 2012 Tech Science Press CMES, vol.83, no.3, pp.249-273, 2012
3
configuration are ix and the base vectors are ( )3,2,1=iie .
11, ex
Von Karman nonlinear strains in rotated reference frame ei
1
2Undeformed element
Initial configuration
Current configuration
22 , ex
33 , ex
u1u2
3
22~,~ ex
33~,~ ex
1
2
3
x 3, e 3
x2, e2
x1, e1
u3
11~,~ ex
12 θ
22 θ
32θ
2 u10
2u30
2 u20
3
1
2
Incremental deformation from the current configuration
Fig.1 Updated Lagrangian reference frame for a plate element
Current configuration
23
x3, u3
x2, u2
x1, u1
1h
3θ
1θ2θ
Fig.2 Large deformation analysis model of a plate element
As shown in Fig.2, we consider the large deformations of a typical thin plate. A fully nonlinear theory (retaining all the nonlinear terms in the relations between the incremental strains and incremental displacements) of deformation is assumed for the continued deformation from the current configuration, in the
Figure 2: Large deformation analysis model of a plate element
assumptions governing the continued deformations from the current configurationare (α = 1,2;β = 1,2,3)
1. hL � 1 (the plate is thin);
2. u3/h∼ O(1);
3.(
∂u3∂xα
)� 1;
4. uα/h� 1;
5.(
∂uα
∂xβ
)2and
(∂u3∂xα
)2are all retained as nonlinear terms in the co-rotational
frame of reference;
6. All strains Eαβ � 1 [where Eαβ are strains from the current configuration,in the xα coordinates];
7. The material is linear. For elastic-plastic material, the rate relation is bi-linear.
Thus, the generally 3-dimensional displacement state in the ei system is simplified

Large Rotation Analyses of Plate/Shell Structures 253
to be of the type
u1 = u10 (xα)− x3∂u3
∂x1
u2 = u20 (xα)− x3∂u3
∂x2
(1)
where
u3 = u30 (x1,x2)u10 = u10 (x1,x2)u20 = u20 (x1,x2)
(2)
2.1 Strain-displacement relations
Considering the complete nonlinearities in the rotated reference frame ei (xi), wecan write the Green-Lagrange strain-displacement relations in the updated La-grangian co-rotational frame ei in Fig.1 as (Cai, Paik and Atluri 2010):
E = EL +EN (3)
where
EL =[EL
11 EL22 EL
12 EL21]T
=[u10,1− x3u30,11 u20,2− x3u30,22 u10,2− x3u30,12 +θ3 u20,1− x3u30,12−θ3
]T(4)
EN =[EN
11 EN22 EN
12 EN21
]T (5)
where , i denotes a differentiation with respect to xi, θ3 = 12 (u20,1−u10,2) are the
drilling degrees of freedom, 2EN11 = u2
10,1 +u220,1 +u2
30,1, 2EN22 = u2
10,2 +u220,2 +u2
30,2,and 2EN
12 = 2EN21 = u10,1u10,2 +u20,1u20,2 +u30,1u30,2.
2.2 Stress-Strain relations
The stress-measure conjugate to these strains is the second Piola-Kirchhoff stresstensor S1
[S1
i j
].
We assume a state of plane-stress to derive the stresses from strains in a thin plateas
S1 = D(εεε
L +εεεN)= S1L +S1N (6)

254 Copyright © 2012 Tech Science Press CMES, vol.83, no.3, pp.249-273, 2012
where
D =E
1−ν2
1 ν 0 0ν 1 0 00 0 1−ν 00 0 0 1−ν
(7)
where E is the elastic modulus; ν is the Poisson ratio.
2.3 Generalized stresses
If the mid-surface of the plate is taken as the reference plane in the co-rotationalupdated Lagrangian reference frame, the generalized forces of the plate in Fig.2can be defined as
σσσ = Dεεε (8)
where σσσ are the element generalized stresses, εεε are the element generalized strains,and
σσσ =
σ1σ2σ3σ4σ5σ6σ7
=
N11N22N12N21M11M22M12
(9)
εεε =
ε1ε2ε3ε4ε5ε6ε7
= εεε
L +εεεN =
u10,1u20,2
u10,2 +θ3u20,1−θ3−u30,11−u30,22−2u30,12
+
12
u210,1 +u2
20,1 +u230,1
u210,2 +u2
20,2 +u230,2
u10,1u10,2 +u20,1u20,2 +u30,1u30,2u10,1u10,2 +u20,1u20,2 +u30,1u30,2
000
(10)
D =
C νC 0 0 0 0 0νC C 0 0 0 0 00 0 C1 0 0 0 00 0 0 C1 0 0 00 0 0 0 D νD 00 0 0 0 νD D 00 0 0 0 0 0 D1
(11)

Large Rotation Analyses of Plate/Shell Structures 255
where C = Eh1−ν2 , D = Eh3
12(1−ν2) , C1 = (1−ν)C and D1 = (1−ν)D/2.
If we denote θ1 = u30,1 and θ2 = u30,2, Eq. (10) can be rewritten as
εεεL = LU =
[u10,1 u20,2 u10,2 +θ3 u20,1−θ3 −θ1,1 −θ2,2 −θ1,2−θ2,1
]T(12)
εεεN =
12
Aθ Uθ (13)
where
L =
∂/∂x1 0 0 0 0 00 ∂/∂x2 0 0 0 0
∂/∂x2 0 0 0 0 10 ∂/∂x1 0 0 0 −10 0 0 −∂/∂x1 0 00 0 0 0 −∂/∂x2 00 0 0 −∂/∂x2 −∂/∂x1 0
(14)
Aθ =
u10,1 u20,1 θ1 0 0 00 0 0 u10,2 u20,2 θ2
u10,2/2 u20,2/2 θ2/2 u10,1/2 u20,1/2 θ1/2u10,2/2 u20,2/2 θ2/2 u10,1/2 u20,1/2 θ1/2
0 0 0 0 0 00 0 0 0 0 00 0 0 0 0 0
(15)
U =[u10 u20 u30 θ1 θ2 θ3
]T (16)
Uθ =[u10,1 u20,1 θ1 u10,2 u20,2 θ2
]T (17)
3 Interpolation functions
As shown in Fig.2, the plate element has three nodes with 6 degrees of freedom pernode. By defining the following DKT displacements functions
θ1 =3
∑i=1
(Riwi +Rxiθ1i +Ryiθ2i)
θ2 =3
∑i=1
(Hiwi +Hxiθ1i +Hyiθ2i)
(18)

256 Copyright © 2012 Tech Science Press CMES, vol.83, no.3, pp.249-273, 2012
where
R1 = 1.5(m6N6/l6−m4N4/l4) , R2 = 1.5(m4N4/l4−m5N5/l5) ,
R3 = 1.5(m5N5/l5−m6N6/l6) ,
Rx1 = N1 +N4(0.5n2
4−0.25m24)+N6
(0.5n2
6−0.25m26),
Rx2 = N2 +N4(0.5n2
4−0.25m24)+N5
(0.5n2
5−0.25m25),
Rx3 = N3 +N5(0.5n2
5−0.25m25)+N6
(0.5n2
6−0.25m26),
Ry1 =−0.75(m4n4N4 +m6n6N6) , Ry2 =−0.75(m4n4N4 +m5n5N5) ,
Ry3 =−0.75(m5n5N5 +m6n6N6) ;
H1 = 1.5(n6N6/l6−n4N4/l4) , H2 = 1.5(n4N4/l4−n5N5/l5) ,
H3 = 1.5(n5N5/l5−n6N6/l6) ,
Hx1 = Ry1, Hx2 = Ry2, Hx3 = Ry3,
Hy1 = N1 +N4(0.5m2
4−0.25n24)+N6
(0.5m2
6−0.25n26),
Hy2 = N2 +N4(0.5m2
4−0.25n24)+N5
(0.5m2
5−0.25n25),
and
Hy3 = N3 +N5(0.5m2
5−0.25n25)+N6
(0.5m2
6−0.25n26)
;
lk is the length of side i j (i = 1,2,3 and j = 2,3,1 when k = 4,5,6); mk = cosαkand nk = sinαk ( k = 4,5,6) where αk is defined in Fig.3;
N j = (2L j−1)L j ( j = 1,2,3)N4 = 4L1L2,N5 = 4L2L3,N6 = 4L3L1
(19)
Li are the area coordinates of the three-node triangular plate elements and can beexpressed as
Li =1
2A(ai +bix1 + cix2) (20)
ai = x j1xm
2 − xm1 x j
2, bi = x j2− xm
2 , ci =−x j1 + xm
1 (21)
where i = 1,2,3; j = 2,3,1; m = 3,1,2, and A is the area of the triangular element,

Large Rotation Analyses of Plate/Shell Structures 257
we can approximate the displacement function in each plate element by
U = Na =[N1 N2 N2
]a1a2a3
(22)
where the displacement function U is defined in Eq.(16), the displacement vectorsof node i in the updated Lagrangian frame ei of Fig.2 are:
ai =[ui
10 ui20 ui
30 θ i1 θ i
2 θ i3
]T [i = 1,2,3] (23)
Ni =
Li 0 0 0 0 00 Li 0 0 0 00 0 Li 0 0 00 0 Ri Rxi Ryi 00 0 Hi Hxi Hyi 00 0 0 0 0 Li
[i = 1,2,3] (24)
9
4α
Fig.3 Triangular plate element
From Eqs.(12), (13) and (22), we obtain
( )aBBεεε ˆ ˆ NLNL +=+= (25)
where
[ ]L3
L2
L1
L BBBB = (26)
−−−−−−−−−−−−
−=
000
000
000
0000
0000
00000
00000
1,2,1,2,1,2,
2,2,2,
1,1,1,
1,
2,
2,
1,
L
yiyixixiii
yixii
yixii
ii
ii
i
i
i
HRHRHR
HHH
RRR
LL
LL
L
L
B (27)
2ˆ N GAB θ= (28)
where
[ ]321 GGGG = (29)
=
000
00000
00000
000
00000
00000
2,
2,
1,
1,
yixii
i
i
yixii
i
i
i
HHH
L
L
RRR
L
L
G (30)
and thus
( ) ( ) ( ) ( ) aBaBBaBBε ˆˆˆ2 NLNL δδδδ =+=+= (31)
Figure 3: Triangular plate element
From Eqs.(12), (13) and (22), we obtain
εεε = εεεL +εεε
N =(BL + BN) a (25)
where
BL =[BL
1 BL2 BL
3]
(26)

258 Copyright © 2012 Tech Science Press CMES, vol.83, no.3, pp.249-273, 2012
BLi =
Li,1 0 0 0 0 00 Li,2 0 0 0 0
Li,2 0 0 0 0 Li
0 Li,1 0 0 0 −Li
0 0 −Ri,1 −Rxi,1 −Ryi,1 00 0 −Hi,2 −Hxi,2 −Hyi,2 00 0 −Ri,2−Hi,1 −Rxi,2−Hxi,1 −Ryi,2−Hyi,1 0
(27)
BN = Aθ G/2 (28)
where
G =[G1 G2 G3
](29)
Gi =
Li,1 0 0 0 0 00 Li,1 0 0 0 00 0 Ri Rxi Ryi 0
Li,2 0 0 0 0 00 Li,2 0 0 0 00 0 Hi Hxi Hyi 0
(30)
and thus
δ (εεε) =(BL +2BN)
δ a =(BL +BN)
δ (a) = Bδ a (31)
4 Updated Lagrangian formulation in the co-rotational reference frame ei
If τ0i j are the initial Cauchy stresses in the updated Lagrangian co-rotational frame
ei of Fig.1, and S1i j are the additional (incremental) second Piola-Kirchhoff stresses
in the same updated Lagrangian co-rotational frame with axes ei, then the staticequations of linear momentum balance and the stress boundary conditions in theframe ei are given by
∂
∂xi
[(S1
ik + τ0ik) (
δ jk +∂u j
∂xk
)]+b j = 0 (32)
(S1
ik + τ0ik) (
δ jk +∂u j
∂xk
)ni− f j = 0 (33)
where b j are the body forces per unit volume in the current reference state, and f j
are the given boundary loads.

Large Rotation Analyses of Plate/Shell Structures 259
By letting Sik = S1ik + τ0
ik, the equivalent weak form of the above equations can bewritten as∫V
{∂
∂xi
[Sik
(δ jk +
∂u j
∂xk
)]+b j
}δu jdV−
∫Sσ
[Sik
(δ jk +
∂u j
∂xk
)ni− f j
]δu jdS = 0
(34)
where δu j are the test functions.
By integrating by parts the first item of the left side, the above equation can bewritten as∫V
−Sik
(δ jk +
∂u j
∂xk
)δu j, idV +
∫V
b jδu jdV +∫Sσ
f jδu jdS = 0 (35)
From Eq.(6) we may write
S1ik = S1L
ik +S1Nik (36)
Then the first item of Eq.(35) becomes
Sik(δ jk +u j,k
)δu j,i =
(τ
0i j + τ
0iku j,k +S1L
i j +S1Ni j +S1
iku j,k)
δu j,i
= S1Li j δε
Li j + τ
0ikδ
(12
u j,ku j,i
)+(τ
0i j +S1N
i j +S1iku j,k
)δu j,i
(37)
By using Eq.(5), Eq.(35) may be written as∫V
(S1L
i j δεLi j + τ
0i jδε
Ni j)
dV =∫V
b jδu jdV +∫Sσ
f jδu jdS−∫V
(τ
0i j +S1N
i j +S1iku j,k
)δε
Li jdV
(38)
The terms on the right hand side are ‘correction’ terms in a Newton-Rapson typeiterative approach. Carrying out the integration over the cross sectional of eachplate, and using Eqs.(3) to (31), Eq.(38) can be easily shown to reduce to:
∑e
δ aT∫A
(BL)T DBLdA a+δ aT
∫A
(BN)T
σσσ0dA
=
∑e
δ aT F1−δ aT∫A
(BL)T (
σσσ0 +σσσ
1N)dA −δ aT∫A
(BN)T
σσσ1dA
(39)

260 Copyright © 2012 Tech Science Press CMES, vol.83, no.3, pp.249-273, 2012
where F1 =∫V
NTb∗ dV +∫
Sσ
NTf∗ dS is the external equivalent nodal force.
If we neglect the nonlinear items in Eq.(39) for the convenience of solving thenon-linear equation, Eq.(39) can be rewritten as
∑e
[δ aT (KL + KS) a
]= ∑
e
[δ aT (F1− FS) ] (40)
where K = KL + KS is the symmetric tangent stiffness matrix of the plate element,
KL =∫A
(BL)T DBLdA [linear part ] (41)
KS =∫A
(BN)T
σσσ0dA =
∫A
GTσσσ
0θ GdA [nonlinear part ] (42)
FS =∫A
(BL)T
σσσ0dA (43)
where the element generalized stresses are updated by using σσσ = σσσ0 +σσσ1L,
σσσ0θ =
[N0
11I N012+N0
212 I
N012+N0
212 I N0
22I
](44)
I =
1 0 00 1 00 0 1
(45)
The tangent stiffness matrix K = KL + KS is a 18×18 symmetric matrix, and canbe explicitly expressed with the coordinates of the nodes of the triangular element,by using the Eqs. (11), (26), (28) and (44).
It is clear from the above procedures, that the explicit expression and the numericalimplementation of the present (18×18) symmetric tangent stiffness matrices of theplate in the co-rotational reference frame, based on the primal theory, are muchsimpler than those based on Reissner variational principle (Cai, Paik and Atluri2010) and many others in the literature for large rotation/deformation analysis ofbuilt-up plate/shell structures

Large Rotation Analyses of Plate/Shell Structures 261
5 Transformation between deformation dependent co-rotational local [ei],and the global [ei] frames of reference
As shown in Fig.1, xi (i = 1,2,3) are the global coordinates with unit basis vectorsei. By letting xi and ei be the co-rotational reference coordinates for the deformedplate element, the basis vectors ei are chosen such that
e1 =(x12
1 e1 + x122 e2 + x12
3 e3)/
l12 = a1e1 + a2e2 + a3e3
e3 = c1e1 + c2e2 + c3e3
e2 = e3× e1
(46)
where x jki = x j
i − xki , l jk =
[(x jk
1
)2+(
x jk2
)2+(
x jk3
)2] 1
2
,
b1 =x13
1l13 , b2 =
x132
l13 , b3 =x13
3l13 (47)
c1 =a2b3− a3b2
lc , c2 =a3b1− a1b3
lc , c3 =a1b2− a2b1
lc (48)
and
lc =[(
a2b3− a3b2)2 +
(a3b1− a1b3
)2 +(a1b2− a2b1
)2] 1
2(49)
Then ei and ei have the following relations:e1e2e3
=
a1 a2 a3d1 d2 d3c1 c2 c3
e1e2e3
(50)
where
d1 = c2a3− c3a2, d2 = c3a1− c1a3, d3 = c1a2− c2a1 (51)
λλλ 0 =
a1 a2 a3d1 d2 d3c1 c2 c3
(52)
Thus, the transformation matrix λλλ for the plate element, between the 18 general-ized coordinates in the co-rotational reference frame ei, and the corresponding 18

262 Copyright © 2012 Tech Science Press CMES, vol.83, no.3, pp.249-273, 2012
coordinates in the global Cartesian reference frame ei, is given by
λλλ =
λλλ 0 0 0 0 0 00 λλλ 0 0 0 0 00 0 λλλ 0 0 0 00 0 0 λλλ 0 0 00 0 0 0 λλλ 0 00 0 0 0 0 λλλ 0
(53)
Then the element matrices are transformed to the global coordinate system using
a = λλλT a (54)
K = λλλT Kλλλ (55)
F = λλλT F (56)
where a,K, F are respectively the generalized nodal displacements, element tangentstiffness matrix and generalized nodal forces, in the global coordinates system. TheNewton-Raphson method is used to solve the nonlinear equation of the plate in thisimplementation.
6 Numerical examples
6.1 Buckling of the thin plate
The (18×18) tangent stiffness matrix for a plate in space should be capable of pre-dicting buckling under compressive axial loads, when such an axial load interactswith the transverse displacement in the plate. We consider the plate with two typesof boundary conditions as shown in Figs.4a and 4b. Assume that the thickness ofthe plate is h = 0.01, and a = b = D = 1. The buckling loads of the plate obtainedby the present method using different numbers of elements are shown in Tab.1. Itis seen that the buckling load predicted by the present method agrees well with theanalytical solution (buckling load is Pcr = kπ2D/b2, where k = 4 for Fig.4a andk = 1.7 for Fig.4b).
6.2 A simply supported or clamped square plate
A simply supported or clamped square plate loaded by a central point load p ora uniform load q is considered for linear elastic analysis. The side length and thethickness of the square plate are l and h. The results listed in Tab.2 and Tab.3 in-dicate the good accuracy and convergence rate of the present elements. Numericalresults also indicate that, although the primal methods are used, the displacementsolutions of the example are not always convergence from "BELOW" for the DKT-type approach.

Large Rotation Analyses of Plate/Shell Structures 263
14
method agrees well with the analytical solution (buckling load is 22 / bDkPcr π= ,
where 4=k for Fig.4a and 7.1=k for Fig.4b).
b
Fig.4 Model of the plate subject to an axial force
Tab.1 Buckling load of the plate
Mesh Fig.4a Fig.4b
Present method Exact Present method Exact 4×4 39.7001
39.4784 17.0938
16.7783 8×8 39.4956 16.8422 16×16 39.4787 16.7807
6.2 A simply supported or clamped square plate
A simply supported or clamped square plate loaded by a central point load p or
a uniform load q is considered for linear elastic analysis. The side length and
the thickness of the square plate are l and h . The results listed in Tab.2 and Tab.3 indicate the good accuracy and convergence rate of the present elements. Numerical results also indicate that, although the primal methods are used, the displacement solutions of the example are not always convergence from "BELOW" for the DKT-type approach.
Figure 4: Model of the plate subject to an axial force
Table 1: Buckling load of the plate
MeshFig.4a Fig.4b
Present method Exact Present method Exact4×4 39.7001
39.478417.0938
16.77838×8 39.4956 16.842216×16 39.4787 16.7807
Table 2: Central deflection for a square plate clamped along all four boundaries
Mesh Uniform load(wc×ql4/100D
)Point load
(wc× pl2/100D
)2×2 0.1212 0.63424×4 0.1257 0.59058×8 0.1263 0.5706
16×16 0.1265 0.5640Exact 0.1260 0.5600
6.3 Geometrically nonlinear analysis of a clamped square plate subjected to auniform load
The geometrically nonlinear analysis of a clamped plate under uniform load q isstudied (Cui, Liu, Li, Zhao, Nguyen, and Sun 2008). The side length and thethickness of the square plate are l = 100mm and h = 1mm. The material propertiesare E = 2.1e06N/mm2 and ν = 0.316. The analytic central solution of the plate is

264 Copyright © 2012 Tech Science Press CMES, vol.83, no.3, pp.249-273, 2012
Table 3: Central deflection for a square plate simply supported along all four bound-aries
Mesh Uniform load(wc×ql4/100D
)Point load
(wc× pl2/100D
)2×2 0.3673 1.28204×4 0.3972 1.19938×8 0.4040 1.1719
16×16 0.4057 1.1635Exact 0.4062 1.1600
given by chia (1980):(w0
h
)3+0.2522
w0
h= 0.0001333
ql4
Dh(57)
where wc = 2.5223w0.
The whole plate is modeled and the central deflection wc of the plate for differentmeshes is shown in Tab.4. It is observed that the results of the present methodconverge quickly to the analytic solution.
Table 4: The central deflection of a clamped square plate subjected to a uniformload
Meshq
0.5 1.3 2.1 3.4 5.54×4 0.340689 0.736689 0.999181 1.294422 1.6190918×8 0.321312 0.702915 0.960410 1.253279 1.578696
16×16 0.314811 0.690971 0.945723 1.235726 1.55809532×32 0.313109 0.687847 0.941829 1.230899 1.552026
Analytical 0.322050 0.688258 0.933327 1.214635 1.531733
6.4 Geometrically nonlinear analysis of a clamped circular plate subjected to auniform load
The large deformation analysis of a clamped circular plate subjected to a uniformlydistributed load q is considered. The radius of the plate is r = 100 and the thicknessof the plate is h = 2. The material properties are E = 1.0e07 and ν = 0.3. Theanalytic central deflection w0 of the plate is given by Chia (1980):
163(1−ν2)
[w0
h+
1360
(1+ν)(173−73ν)(w0
h
)3]
=qr4
Eh4 (58)

Large Rotation Analyses of Plate/Shell Structures 265
Due to the double symmetry, only one quarter of the plate is discretized as shownin Fig.5. Fig.6 shows the comparison of the present result of the central deflectionand the analytic solution by Chia (1980). It is observed that the present result is invery good agreement with the analytical solution.
Figure 5: Mesh of one quarter of a clamped circular plate
6.5 Geometrically nonlinear analysis of a clamped circular plate subjected to aconcentrated load
The circular plate subjected to a concentrated load p at the center of the plate isconsidered (Zhang and Cheung 2003). The geometric and material property are thesame as the Section 5.4. Tab.5 gives the nondimensional central deflections w/h ofthe circular plate by using 289 nodes from the present method and the analyticalsolution by Chia (1980).
6.6 Nonlinear analysis of a cantilever plate with conservative end load
The cantilever plate with conservative end load shown in Fig.7 has been analyzed.The geometry parameters are a = 40m, b = 30m and h = 0.4m. The material prop-erties are E = 1.2e8N/m2 and ν = 0.3. The load-deflection curve is shown in Fig.8where the present solution using a mesh of 8×8 is compared with the solution by

266 Copyright © 2012 Tech Science Press CMES, vol.83, no.3, pp.249-273, 2012
17
W0
/ h
qR4/Eh4
0 5 10 15 20 250.0
0.5
1.0
1.5
2.0
Present methodAnalytical
Fig.6 Nonlinear results of a clamped circular plate
6.5 Geometrically nonlinear analysis of a clamped circular plate subjected to a concentrated load
The circular plate subjected to a concentrated load p at the center of the plate
is considered (Zhang and Cheung 2003). The geometric and material property are the same as the Section 5.4. Tab.5 gives the nondimensional central deflections hw / of the circular plate by using 289 nodes from the present method and the analytical solution by Chia (1980).
Tab.5 Nondimensional central deflection hw / of a clamped circular plate subjected to a concentrated load
( )42 Ehpr
1 2 3 4 5 6 Present method
0.2139 0.4080 0.5751 0.7182 0.8424 0.9520
Analytical solution
0.2129 0.4049 0.5695 0.7098 0.8309 0.9372
6.6 Nonlinear analysis of a cantilever plate with conservative end load
The cantilever plate with conservative end load shown in Fig.7 has been analyzed. The geometry parameters are ma 40= , mb 30= and mh 4.0= . The
material properties are 2/82.1 mNeE = and 3.0=ν . The load-deflection curve is
shown in Fig.8 where the present solution using a mesh of 8×8 is compared with
the solution by Oral and Barut (1991). AW and BW in Fig.8 are
Figure 6: Nonlinear results of a clamped circular plate
Table 5: Nondimensional central deflection w/h of a clamped circular plate sub-jected to a concentrated load
pr2/(Eh4
)1 2 3 4 5 6
Present method 0.2139 0.4080 0.5751 0.7182 0.8424 0.9520Analytical solution 0.2129 0.4049 0.5695 0.7098 0.8309 0.9372
Oral and Barut (1991). WA and WB in Fig.8 are correspondingly the deflections ofpoint A and point B along x3.
6.7 Nonlinear analysis of a cylindrical shell panel
A cylindrical shell panel clamped along all four boundaries shown in Fig.9 is con-sidered for nonlinear analysis. The shell panel is subjected to inward radial uniformload q. The geometry parameters are l = 254mm, r = 2540mm, h = 3.175mm andθ = 0.1rad. The material properties are E = 3.10275kN/mm2 and ν = 0.3. Due tothe double symmetry, only one quarter of the panel is discretized using a mesh of8×8. The present results of the central deflection together with solutions by Dhatt(1970) are shown in Fig.10. It is observed that the present method works very well.

Large Rotation Analyses of Plate/Shell Structures 267
18
correspondingly the deflections of point A and point B along 3x .
Fig.7 Cantilever plate with end load
0 5 10 15 20 25 300
5
10
15
20
25
30
35
40
load
P (
KN
)
Displacement (m)
WB--Present
WA--Present
WA--Oral and Barut (1991 )
WB--Oral and Barut (1991)
Fig.8 Load-deflection curve for the cantilever plate
6.7 Nonlinear analysis of a cylindrical shell panel
A cylindrical shell panel clamped along all four boundaries shown in Fig.9 is
considered for nonlinear analysis. The shell panel is subjected to inward radial
Figure 7: Cantilever plate with end load
18
correspondingly the deflections of point A and point B along 3x .
Fig.7 Cantilever plate with end load
0 5 10 15 20 25 300
5
10
15
20
25
30
35
40
load
P (
KN
)
Displacement (m)
WB--Present
WA--Present
WA--Oral and Barut (1991 )
WB--Oral and Barut (1991)
Fig.8 Load-deflection curve for the cantilever plate
6.7 Nonlinear analysis of a cylindrical shell panel
A cylindrical shell panel clamped along all four boundaries shown in Fig.9 is
considered for nonlinear analysis. The shell panel is subjected to inward radial
Figure 8: Load-deflection curve for the cantilever plate

268 Copyright © 2012 Tech Science Press CMES, vol.83, no.3, pp.249-273, 2012
19
uniform load q . The geometry parameters are mml 254= , mmr 2540= ,
mmh 175.3= and rad1.0=θ . The material properties are 2/10275.3 mmkNE =
and 3.0=ν . Due to the double symmetry, only one quarter of the panel is
discretized using a mesh of 8×8. The present results of the central deflection
together with solutions by Dhatt (1970) are shown in Fig.10. It is observed that
the present method works very well.
2l
sym
sym
rθ
Fig.9 Model of the shell panel
Fig.10 Nonlinear results of a clamped cylindrical shell panel
Figure 9: Model of the shell panel
19
uniform load q . The geometry parameters are mml 254= , mmr 2540= ,
mmh 175.3= and rad1.0=θ . The material properties are 2/10275.3 mmkNE =
and 3.0=ν . Due to the double symmetry, only one quarter of the panel is
discretized using a mesh of 8×8. The present results of the central deflection
together with solutions by Dhatt (1970) are shown in Fig.10. It is observed that
the present method works very well.
2l
sym
sym
rθ
Fig.9 Model of the shell panel
Fig.10 Nonlinear results of a clamped cylindrical shell panel
Figure 10: Nonlinear results of a clamped cylindrical shell panel
6.8 Hinged spherical shell with central point load
The hemispherical shell with an 180 hole shown in Fig.11 is analyzed. The geom-etry parameters are the radius r = 10m and h = 0.04m. The material properties areE = 6.825e7kN/m2 and ν = 0.3. Due to the double symmetry, only one quarter of

Large Rotation Analyses of Plate/Shell Structures 269
the shell is discretized using a mesh of 16×16(Fig.12). Fig.13 shows the presentsolutions based on primal method are in good agreement with the results of Kimand Lomboy (2006). The deformed shape of hemispherical shell with a mesh of16×16 when F = 200kN is shown in Fig.14.
20
6.8 Hinged spherical shell with central point load
The hemispherical shell with an 180 hole shown in Fig.11 is analyzed. The geometry parameters are the radius mr 10= and mh 04.0= . The material
properties are 2/7825.6 mkNeE = and 3.0=ν . Due to the double symmetry,
only one quarter of the shell is discretized using a mesh of 16×16(Fig.12). Fig.13 shows the present solutions based on primal method are in good agreement with the results of Kim and Lomboy (2006). The deformed shape of hemispherical shell with a mesh of 16×16 when kNF 200= is shown in Fig.14.
F
F
F
F x1
x2
x3
18 deg
Fig.11 Model for hemispherical shell with an 180 hole
F=1.0
F=1.0
18 deg
Free
Free
Sym
Sym
Fig.12 Mesh for the hemispherical shell with an 180 hole
Figure 11: Model for hemispherical shell with an 18 0 hole
20
6.8 Hinged spherical shell with central point load
The hemispherical shell with an 180 hole shown in Fig.11 is analyzed. The geometry parameters are the radius mr 10= and mh 04.0= . The material
properties are 2/7825.6 mkNeE = and 3.0=ν . Due to the double symmetry,
only one quarter of the shell is discretized using a mesh of 16×16(Fig.12). Fig.13 shows the present solutions based on primal method are in good agreement with the results of Kim and Lomboy (2006). The deformed shape of hemispherical shell with a mesh of 16×16 when kNF 200= is shown in Fig.14.
F
F
F
F x1
x2
x3
18 deg
Fig.11 Model for hemispherical shell with an 180 hole
F=1.0
F=1.0
18 deg
Free
Free
Sym
Sym
Fig.12 Mesh for the hemispherical shell with an 180 hole Figure 12: Mesh for the hemispherical shell with an 18 0 hole

270 Copyright © 2012 Tech Science Press CMES, vol.83, no.3, pp.249-273, 2012
21
Dis
plac
emen
t (m
)
Fig.13 Nonlinear solutions for hemispherical shell
Fig.14 Deformed shape of hemispherical shell when kNF 200=
7. Conclusions
Based on a fully nonlinear theory of deformation in the co-rotational updated
Lagrangian reference frame and the primal principle, a simple finite element
method has been developed for large deformation/rotation analyses of
plate/shell structures with thin members. It is shown to be possible to derive an
explicit expression for the (18x18) symmetric tangent stiffness matrix of each
element, including nodal displacements, nodal derivatives of transverse
displacements, and nodal drilling degrees of freedom, even if
assumed-displacement type formulations are used. The explicit expression and
Figure 13: Nonlinear solutions for hemispherical shell
21
Dis
plac
emen
t (m
)
Fig.13 Nonlinear solutions for hemispherical shell
Fig.14 Deformed shape of hemispherical shell when kNF 200=
7. Conclusions
Based on a fully nonlinear theory of deformation in the co-rotational updated
Lagrangian reference frame and the primal principle, a simple finite element
method has been developed for large deformation/rotation analyses of
plate/shell structures with thin members. It is shown to be possible to derive an
explicit expression for the (18x18) symmetric tangent stiffness matrix of each
element, including nodal displacements, nodal derivatives of transverse
displacements, and nodal drilling degrees of freedom, even if
assumed-displacement type formulations are used. The explicit expression and
Figure 14: Deformed shape of hemispherical shell when F = 200kN
7 Conclusions
Based on a fully nonlinear theory of deformation in the co-rotational updated La-grangian reference frame and the primal principle, a simple finite element methodhas been developed for large deformation/rotation analyses of plate/shell structureswith thin members. It is shown to be possible to derive an explicit expression forthe (18x18) symmetric tangent stiffness matrix of each element, including nodaldisplacements, nodal derivatives of transverse displacements, and nodal drilling

Large Rotation Analyses of Plate/Shell Structures 271
degrees of freedom, even if assumed-displacement type formulations are used. Theexplicit expression and the numerical implementation of the present plate elementare much simpler than many others in the literature for large rotation/deformationanalysis of built-up plate/shell structures. While the present work is limited to elas-tic materials undergoing large deformations, the extension to inelasticity is straightforward and will be pursued in forthcoming publications.
Acknowledgement: The authors gratefully acknowledge the support of Na-tional Basic Research Program of China (973 Program: 2011CB013800), Programfor Changjiang Scholars and Innovative Research Team in University (PCSIRT,IRT1029), and Fundamental Research Funds for the Central Universities (Tongjiuniversity). This research was also supported in part by an agreement of UCI withARL with D.Le, M.Haile and A.Ghoshal as cognizant collaborators, and by theWorld Class University (WCU) program through the National Research Founda-tion of Korea funded by the Ministry of Education, Science and Technology (Grantno.: R33-10049).
References
Albuquerque, E.L.; Aliabadi, M.H. (2008): A boundary element formulationfor boundary only analysis of thin shallow shells. CMES:Computer Modeling inEngineering & Sciences, Vol.29, pp.63-73.
Atluri, S.N. (1980): On some new general and complementary energy theoremsfor the rate problems in finite strain, classical elastoplasticity. Journal of StructuralMechanics, Vol. 8(1), pp. 61-92.
Atluri, S.N. (2005): Methods of Computer Modeling in Engineering & Science.Tech Science Press.
Atluri, S.N.; Cazzani, A. (1994): Rotations in computational solid mechanics,invited feature article. Archives for Computational Methods in Engg., ICNME,Barcelona, Spain, Vol 2(1), pp. 49-138.
Baiz, P.M.; Aliabadi, M.H. (2006): Linear buckling analysis of shear deformableshallow shells by the boundary domain element method. CMES:Computer Model-ing in Engineering & Sciences, vol.13, pp.19-34.
Cai, Y.C.; Paik, J.K.; Atluri S.N. (2010): A triangular plate element with drillingdegrees of freedom, for large rotation analyses of built-up plate/shell structures,based on the Reissner variational principle and the von Karman nonlinear theory inthe co-rotational reference frame. CMES: Computer Modeling in Engineering &Sciences, vol. 61, pp.273-312
Chia, C.Y. (1980): Nonlinear Analysis of Plate. McGraw-Hill, New York.

272 Copyright © 2012 Tech Science Press CMES, vol.83, no.3, pp.249-273, 2012
Chin,Y.;Zhang, J.Y. (1994): A new hybrid quadrilateral finite element for Mindlinplate. Applied Mathematics and Mechanics, Vol.15, pp. 189-199.
Choo, Y.S.; Choi, N.; Lee, B.C.(2010): A new hybrid-Trefftz triangular andquadrilateral plate elements. Applied Mathematical Modelling, Vol. 34, pp. 14-23.
Dhatt, G.S. (1970): Instability of thin shells by the finite element method. IASSSymposium for Folded Plates and Prismatic Structures, Vienna.
Fedelinski, P.; Gorski, R. (2006): Analysis and optimization of dynamicallyloaded reinforced plates by the coupled boundary and finite element method. CMES:Computer Modeling in Engineering & Sciences, Vol.15, pp.31-40.
Gal, E.; Levy, R. (2006): Geometrically nonlinear analysis of shell structures usinga flat triangular shell finite element. Arch. Comput. Meth. Engng., Vol. 13, pp.331-388.
Huang, B.Z.; Shenoy, V.B.; Atluri, S.N. (1994): A quasi-comforming triangularlaminated composite shell element based on a refined first-order theory. Computa-tional Mechanics, Vol.13, pp.295-314.
Iura, M.; Atluri, S.N. (1992): Formulation of a membrane finite element withdrilling degrees of freedom. Computational Mechanics, Vol.9, pp.417-428.
Iura, M.; Atluri, S.N. (2003): Advances in finite rotations in structural mechanics.CMES:Computer Modeling in Engineering & Sciences, Vol.4, pp.213-215.
Kang, L.; Zhang, Q.L.; Wang, Z.Q. (2009): Linear and geometrically nonlinearanalysis of novel flat shell elements with rotational degrees of freedom. FiniteElements in Analysis and Design, Vol.45,pp.386–392.
Kim, K.D.; Lomboy, G.R. (2006): A co-rotational quasi-conforming 4-node re-sultant shell element for large deformation elasto-plastic analysis .Computer Meth-ods in Applied Mechanics and Engineering, vol.195, pp. 6502-6522.
Kulikov, G.M.; Plotnikova, S.V. (2008): Finite rotation geometrically exact four-node solid-shell element with seven displacement degrees of freedom. CMES:Computer Modeling in Engineering & Sciences, Vol.28, pp. 15-38.
Maunder, E.A.W.; Moitinho, J.P. (2005):A triangular hybrid equilibrium plateelement of general degree. International Journal for Numerical Methods in Engi-neering, Vol.63, pp. 315-350.
Nguyen-Van, H.; Mai-Duy, N.; Tran-Cong, T. (2007): A simple and accuratefour-node quadrilateral element using stabilized nodal integration for laminatedplates. CMC:Computers Materials & Continua, vol.6, pp.159-175.
Oral, S.; Barut, A. (1991): A shear-flexible facet shell element for large deflectionand instability analysis. Computer Methods in Applied Mechanics and Engineer-

Large Rotation Analyses of Plate/Shell Structures 273
ing, vol. 93, pp. 415-431.
Rajendran, R.; Narasimhan, K. (2006): Deformation and fracture behaviour ofplate specimens subjected to underwater explosion - a review. International Jour-nal of Impact Engineering, Vol.32, pp.1945-1963.
Wu, C.P.; Chiu, K.H.; Wang, Y.M. (2008): A review on the three-dimensionalanalytical approaches of multilayered and functionally graded piezoelectric platesand shells. CMC:Computers Materials & Continua, Vol.8, pp.93-132.
Zhang, Y.X.; Cheung, Y.K. (2003): Geometric nonlinear analysis of thin platesby a refined nonlinear non-conforming triangular plate element. Thin-Walled Struc-tures, Vol.41, pp.403-418.