Embed Size (px)
Citation preview

EE/CE 3301-002 Handout Prof. Y. Chiu
1
Laplace Transform and Applications
We have seen the application of the phasor technique in solving dynamic circuits, consisting of R, L, C, independent
and controlled sources, for the sinusoidal steady-state response. The procedure shoots directly for the final, forced
(i.e., steady-state) response of the circuit while ignoring the initial transient (or natural) response part. When a
complete solution of the circuit starting at t = 0 is desired, or the excitation is not limited to sinewaves, other tech-
niques of solving are necessary―the Laplace transform is one of such techniques that will be covered in this note.
The most widely used bilateral Laplace transform of a general signal x(t) is given as (with the assumption that
the integral converges)
( ) ( ) ( ) ( ), ,stX s x t e dt X s x t+
−
−
⎯⎯→= L
(1)
where s = σ + jω is a complex variable. The bilateral Laplace transform degenerates to the Fourier transform (you
will learn this in ENGR 3302, Signals and Systems) once the real part of s is set to zero, i.e., Re{s} = σ = 0:
( ) ( ) ,j tX s j x t e dt
+−
−
= = (2)
which is useful when analyzing the convergence and inverse transform of the Laplace.
In analyzing linear time-invariant (LTI) circuits and systems with the input onset at t = 0 and the circuit or
system may have non-zero initial conditions or energy storage (for example, the step response of an RLC circuit),
the unilateral Laplace transform is often used instead:
( ) ( ) ( ) ( )0
, .stX s x t e dt X s x t−
+−
⎯⎯⎯→= UL
(3)
Comparing to the bilateral counterpart, the unilateral Laplace transform sets the lower limit of the integral to 0−,
which is to include any impulse or singularity functions at t = 0―a very useful resort to handle, for example, the
impulse response of the system or the simple action of throwing a switch at time zero. If no such impulse or singu-
larity occurs, setting the lower limit of integration to 0− or 0 yields no difference ( ) ( )0 0
0
0 0
.0stx t e dt x t e dt− −
−
= = If
x(t) does not contain any singularity at t = 0, the unilateral and the bilateral Laplace transforms can be related as
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )0
, ,st stX s x t e dt x t u t e dt x t X s x t u t−
+ +− −
−
⎯⎯⎯→ ⎯⎯→= = UL L
(4)
where u(t) is the unit step function defined as (e.g., recall the step response of dynamic circuits)
( )( )
0, 0,
1, 0.
u t t
u t t
=
= (5)
Differentiating the step function gives us another useful function called the impulse or Dirac delta function:
( )( ) , 0,
0, o.w.
du t tt
dt
+ == = (6)
The impulse function is a signal of infinite amplitude and zero duration. It enables us to differentiate the step func-
tion u(t) at its discontinuity at t = 0 (see Fig. 1). Note that
( )( )
( ) 1.du t
t dt dt u tdt
+ +
+
−− −
= = = (7)

EE/CE 3301-002 Handout Prof. Y. Chiu
2
The output produced by a circuit or system when excited by δ(t) is called the impulse response, denoted as
h(t), which is of great importance in characterizing the circuit or system. The step and impulse functions are very
useful in circuit analysis. We note the sifting property of the delta function:
( ) ( ) ( ) ( ) ( ) ( ) ( ).x t d x t t d x t t d x t + + +
− − −
− = − = − = (8)
Examples of Laplace Transform
Exponential: ( ) ( ) ( ) ( )
00
1 1, 0 .
s a tat at stx t e u t a X s e e dt es a s a−
−
− +− − −= → = = − =
+ + (9)
In the last step of (9), we assumed that σ + a > 0 or σ > −a, so e−(s+a)∞ evaluates to 0―the constraint Re{s} = σ >
−a denotes the region of convergence, or the ROC, of the transform. In general, a Laplace transform must be
specified with its ROC.
Sinewave:
( ) ( ) ( )
( ) ( ) 2 20 0
sin
1 1 1sin .
2 2
j t j tst st
x t t u t
e eX s t e dt e dt
j j s j s j s
− −
−− −
= →
−= = = − =
− + + (10)
In (10), the ROC is Re{s} > 0. Fig. 2 shows the ROC’s of the above two transforms.
Step: ( ) ( ) ( )0
0
1 1.st stx t u t X s e dt e
s s−−
− −= → = = − = (11)
u(t)
t
1
0
(a)
δ(t)
t0
(b)
Fig. 1 (a) Unit step function, (b) im-pulse function, (c) approaching the step function by letting ε → 0, and (d) approaching the impulse func-tion by differentiating the waveform in (c) and letting ε → 0. Note the area underneath the curve is con-stant and equals 1.
u(t)
t
1
0 ε ε
(c)
δ(t)
t
1
2ε
0 ε ε
Area = 1
(d)
jω
σ0
ROC
s-plane
a
(a)
jω
σ0
ROC
s-plane
+jω
jω
(b)
Fig. 2 (a) The ROC of the Laplace trans-form of e−at, a > 0 and (b) the ROC of the transform of sin(ωt). The cross symbol marks the positions of the roots of the denominators, a.k.a. the poles of the transform X(s).

EE/CE 3301-002 Handout Prof. Y. Chiu
3
The ROC is Re{s} > 0.
Impulse: ( ) ( ) ( ) ( ) 0
0
1.st sx t t X s t e dt e −
− −= → = = = (12)
The ROC is the entire s-plane.
Table 1 lists a few functions and their unilateral Laplace transforms commonly encountered in circuit analysis.
Properties of Laplace Transform
Linearity: ( ) ( ) ( ) ( )1 2 1 2.ax t bx t aX s bX s+ → + (13)
ROC: at least ROC1 ∩ ROC2, because the summation of X1(s) and X2(s) may result in pole cancellation.
Differentiation:
( )
( ) ( ) ( ) ( ) ( ) ( )0
0 0 0
0 .st st st st
dx t
dt
dx t e dt e dx t x t e s x t e dt sX s x
dt −− − −
− − − − −
→
= = + = − (14)
ROC: at least ROC ∩ {Re{s} > 0, so e−s∞ evaluates to 0}, considering possible pole cancellation.
Integration:
( ) ( ) ( )
( ) ( ) ( )
0 0 0 0 0
0 00
1
1 1.
t t tst st
tst st
x d x d e dt x d des
x d e x t e dt X ss s
− − − − −
− −−
− −
− −
→ = −
= − − =
(15)
Table 1 Common Unilateral Laplace Transform Pairs
x(t) X(s) ROC
( )t 1 Entire s-plane
( )u t 1
s Re{s} > 0
t 2
1
s Re{s} > 0
ate− 1
s a+ Re{s} > −a
( )sin t 2 2s
+ Re{s} > 0
( )cos t 2 2
s
s + Re{s} > 0
atte− ( )
2
1
s a+ Re{s} > −a
( )sinate t−
( )2 2s a
+ + Re{s} > −a
( )cosate t−
( )2 2
s a
s a
+
+ + Re{s} > −a

EE/CE 3301-002 Handout Prof. Y. Chiu
4
ROC: at least ROC ∩ {Re{s} > 0}, considering possible pole cancellation.
Convolution:
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
1 2 1 2 1 2
0 0
1 2 2 1 1 2,
st st
s s
x t x t x x t d e dt x x t e dt d
x e X s d X s x e d X s X s
− −
+ + − −
− −
+ +− −
− −
→ − = −
= = =
(16)
where we considered that x1(t) and x2(t) are identically zero for t < 0.
ROC: at least ROC1 ∩ ROC2, considering possible pole cancellation.
Initial-Value Theorem: ( )0
limt
x t+→
= ( )lims
sX s→
(17)
Final-Value Theorem: ( )limt
x t→
= ( )0
lims
sX s→
(18)
The proof of the initial- and final-value theorems can be approached by invoking (14) and is left as an exercise (see
§12.9 if you need help on this).
Table 2 lists some common properties of the unilateral La-
place transform and the initial- and final-value theorems.
Example 1: For the parallel RLC circuit shown in Fig. 3, find the
step response of vo(t) for t ≥ 0 using the Laplace transform
method. The circuit has no energy storage before t = 0.
Table 2 Properties of The Unilateral Laplace Transform
Property x(t) X(s) ROC
Linearity ( ) ( )1 1 2 2k x t k x t+ ( ) ( )1 1 2 2
k X s k X s+ At least ROC1 ∩ ROC2
s-domain shift ( )0s te x t ( )0
X s s− ROC shifted by Re{s0}
Time scaling ( ) , 0x kt k 1 s
Xk k
ROC scaled by k
Conjugation ( )x t ( )X s
ROC
Convolution† ( ) ( )1 2x t x t ( ) ( )1 2
X s X s At least ROC1 ∩ ROC2
t-domain derivative ( )d
x tdt
( ) ( )0sX s x −− At least ROC ∩ {Re{s} > 0}
2nd-order derivative ( )2
2
dx t
dt ( ) ( ) ( )2
0 0d
s X s sx xdt
− −− − At least ROC ∩ {Re{s} > 0}
s-domain derivative ( )tx t− ( )d
X sds
ROC
t-domain integral ( )0
t
x d −
( )1
X ss
At least ROC ∩ {Re{s} > 0}
Initial-value theorem ( )0
limt
x t+→
= ( )lims
sX s→
Final-value theorem ( )limt
x t→
= ( )0
lims
sX s→
† with the assumption that x1(t) and x2(t) are identically zero for t < 0.
L
+
t = 0Idc CR vo(t)
Fig. 3 A parallel RLC circuit

EE/CE 3301-002 Handout Prof. Y. Chiu
5
The integrodifferential equation describing the RLC circuit is
( )( )
( )( )
0
1.
to o
o dc
v t dv tv d C I u t
R L dt + + =
Performing Laplace transform on both sides of the above equation, we have
( ) ( )( )
1 1.
o oo dc
V s V sC sV s I
R L s s + + =
Solve, we have
( )( )2
.1 1
dco
I CV s
s RC s LC=
+ +
Lastly, we need to perform the inverse Laplace transform on Vo(s) to obtain vo(t):
( ) ( ) 1 .o ov t V s−=L
Poles and Zeros
Most of the Laplace transforms we have seen so far are rational functions, which can be expressed as the ratio of
two polynomials of variable s:
( )( )( )
( )( ) ( )
( )( ) ( )
11 21 1 0
11 1 0 1 2
,n n
nn nm m
m mm
s z s z s zN s a s a s a s aX s K
D s b s b s b s b s p s p s p
−−
−−
− − −+ + + += = =
+ + + + − − − (19)
where K = an/bm. if m > n, the ratio N(s)/D(s) is called a proper rational function; if m ≤ n, it is called an improper
rational function. An improper rational function can always be expressed as the sum of a proper one and a poly-
nomial of s by performing long division on N(s)/D(s)―see Example 3.
The roots of the numerator polynomial N(s), i.e., z1, z2, …, zn, are called the zeros of the function X(s), and the
roots of the denominator polynomial D(s), i.e., p1, p2, …, pm, are called the poles. We observe that on the s-plane
X(s) evaluates to zero for s = z1, z2, …, zn and to infinite for s = p1, p2, …, pm―thus the names zero and pole. In Fig.
2, examples are shown in the complex s-plane illustrating the poles s = −a and s = ±jω of the transforms of the
exponential and sinewave, respectively. These plots are termed the pole-zero plot. Since s = σ + jω, the real axis
(abscissa) of a pole-zero plot is often labeled σ and the imaginary axis (ordinate) is labeled jω. Note that the poles
are marked by × and zeros are marked by ○ in the pole-zero plot.
Note that equal number of poles and zeros exist in a rational function X(s)―if they are not at a finite location,
then they must be at infinity. For example, 1/(1 + s) has a pole at −1, but no obvious zeros. The zero is actually
located at ∞, as can be verified by the fact that 1/(1 + s) evaluates to 0 for s = ∞. Another example: s + 1 has a zero
at −1, but no obvious poles. The pole is actually at ∞, as can be seen when 1 + s evaluates to ∞ for s = ∞.
Inverse Laplace Transform―Partial Fraction Expansion
The inverse Laplace transform can be derived using the Fourier transform aided by the contour integral in the s-
plane. We give the expression of the inverse Laplace transform without diving into the detail of derivation (see
Oppenheim and Willsky, Signals & Systems, 2nd Ed., Prentice Hall):
( ) ( )1
,2
j
st
j
x t X s e dsj
+
−
= (20)
where the contour of integration is the straight line in the s-plane corresponding to all points satisfying Re{s} = σ.

EE/CE 3301-002 Handout Prof. Y. Chiu
6
For rational functions, a shortcut exists for evaluating the inverse Laplace transform, the partial fraction expan-
sion. The following example illustrates the exact procedures of this technique.
Example 2: Find the inverse Laplace transform of X(s) = 1/(s2 + 3s + 2).
( )( )( )2
1 1 1 1.
1 23 2 1 2X s
s ss s s s= = = −
+ ++ + + +
From Table 1, 1/(s + 1) corresponds to the signal e−tu(t) and 1/(s + 2) corresponds to the signal e−2tu(t). By super-
position, the inverse transform of X(s) is
( ) ( ) ( )2 .t tx t e e u t− −= +
The function X(s) in Example 2 is a proper rational function. For improper functions, we can always first
expand them into the sum of a polynomial and a proper rational function by performing long division on X(s), and
then perform the partial fraction expansion on the proper part to obtain the final result. The following example
illustrates this procedure.
Example 3: Find the inverse Laplace transform of X(s) = s3/(s2 + 3s + 2).
( ) ( )( )( )
( )3
2
7 6 1 83 3 .
1 23 2 1 2
s sX s s s
s ss s s s
+ −= = − + = − + +
+ ++ + + +
From Table 1, (s − 3) corresponds to the signal δ′(t) − 3δ(t). So, the inverse transform of X(s) is
( ) ( ) ( ) ( ) ( )23 8 .t tx t t t e e u t − −= − + − +
In general, for proper rational functions, we categorize four scenarios as follows.
A. X(s) with distinct real poles (using an example with three poles)
( )( )
( )( )( )31 2
1 2 31 2 3
,N s KK K
X ss p s p s ps p s p s p
= = + ++ + ++ + +
(21)
where K1, K2, and K3 can be solved by collecting all three terms, evaluating the ensuing numerator and equating it
to N(s). Alternatively, the coefficients can be directly found by evaluating (for K1)
( ) ( )( )
1
1
2 1
1 12
s p
s p
K s ps p X s K
s p=−
=−
++ = +
+
( )
1
3 1
3s p
K s p
s p=−
++
+ 1.K= (22)
K2 and K3 can be found in the same way. The inverse transform can then be looked up in Table 3.
B. X(s) with distinct complex poles
For circuits with real-valued components, the complex poles or zeros must appear in X(s) in conjugate pairs.
( )( )
( )( )
*
,N s K K
X ss j s js j s j
= = ++ − + ++ − + +
(23)1
where K can be found by evaluating
1 The coefficients K and K* appear in (23) in complex conjugate because the polynomial coefficients {an} and {bm} are real.

EE/CE 3301-002 Handout Prof. Y. Chiu
7
( ) ( )( )*
s j
s j
K s js j X s K
s j
=− +
=− +
+ −+ − = +
+ +.K= (24)
The inverse transform can then be looked up in Table 3.
C. X(s) with repeated real poles
( )( )
( ) ( ) ( )31 2
3 3 21
1 1 1
,N s KK K
X ss ps p s p s p
= = + +++ + +
(25)
where K1, K2, and K3 can be found by evaluating
( ) ( )( )
( )1
1
3
3 2 1
1 1 2
1s p
s p
K s ps p X s K
s p=−
=−
++ = +
+
( )
1
3
3 1
1s p
K s p
s p=−
++
+ 1.K=
( ) ( ) ( ) ( )1 1
3 2
1 1 2 1 3 1 2.
s p s p
d ds p X s K K s p K s p K
ds ds=− =−
+ = + + + + = (26)
( ) ( ) ( ) ( )1 1
2 23 2
1 1 2 1 3 1 32 22 .
s p s p
d ds p X s K K s p K s p K
ds ds=− =−
+ = + + + + =
The inverse transform can then be looked up in Table 3.
D. X(s) with repeated complex poles
For circuits with real-valued components, the complex poles or zeros must appear in X(s) in conjugate pairs.
( )( )
( ) ( ) ( ) ( )
* *1 1 2 2
2 2 2 2,
N s K K K KX s
s j s js j s j s j s j = = + + +
+ − + ++ − + + + − + + (27)
where K1 and K2 can be found by evaluating
( ) ( ) ( ) ( )2 2
1 2, .
s j s j
ds j X s K s j X s K
ds
=− + =− +
+ − = + − = (28)
Table 3 Four Useful Laplace Transform Pairs
Nature of Poles X(s) x(t)
Distinct real K
s a+ ( )atKe u t−
Repeated real ( )
2
K
s a+ ( )atKte u t−
Distinct complex conjugate
*K K
s j s j +
+ − + + ( ) ( )2 cos
tK e t u t − +
Repeated complex conjugate ( ) ( )
*
2 2
K K
s j s j +
+ − + + ( ) ( )2 cos
tt K e t u t − +

EE/CE 3301-002 Handout Prof. Y. Chiu
8
The inverse transform can then be looked up in Table 3.
Circuit Elements in the s-Domain
In the following narration, we will use i(t), v(t) or simply i, v to denote the time-domain current, voltage, respec-
tively; and use I(s), V(s) or I, V to denote the s-domain current, voltage, respectively.
Resistor in the s-domain:
( ) ( ) ( ) ( ).v t R i t V s R I s⎯⎯→= = L
(29)
Inductor in the s-domain:
( )
( )( ) ( ) ( ) ( )
( )( ) ( )
0
0 0
0 ,
or .
di tv t L V s L sI s i sL I s LI
dt
V s LI V s II s
sL sL s
− ⎯⎯→
= = − = −
+= = +
L
(30)
The two representations (essentially in the Thévenin and Norton forms) are illustrated in Fig. 4.
Capacitor in the s-domain:
( )
( )( ) ( ) ( ) ( )
( )( ) ( )
0
0 0
0 ,
or .
dv ti t C I s C sV s v sC V s CV
dt
I s CV I s VV s
sC sC s
− ⎯⎯→
= = − = −
+= = +
L
(31)
The two representations of (31) are also illustrated in Fig. 4.
Applications of Laplace Transform in Circuit Analysis
First, we note that the Ohm’s law, KCL, KVL, nodal and mesh analyses, and source transformations (Thévenin and
Norton) are all applicable to the s-domain representation of a circuit. Thus, the treatments of R, L, and C are unified
under the concept of impedance (Z)―the impedances of R, L, and C are R, sL, 1/sC, respectively, all with a unit of
I
sL
LI0
+V
(a)
I
sL
+ V
I0/s
(b) Fig. 4 The s-domain equivalent circuits of the inductor and capacitor in Thévenin and Norton forms
I
+V
V0/s
1/sC
(c)
I + V
1/sC
CV0
(d)

EE/CE 3301-002 Handout Prof. Y. Chiu
9
Ω. In addition, the initial conditions (i.e.,
energy storage in L’s and C’s) are auto-
matically accounted for during the La-
place transform (Fig. 4). The s-domain
analysis does not differentiate the transi-
ent (natural) response from the steady-
state (forced) response of a circuit and
treats them in a unified way. It does not
require the input excitation of the circuit
to be sinusoidal either. Thus, it is a general
technique for circuit analysis that yields
complete solutions from t = 0 to ∞. We
will illustrate these points through the fol-
lowing examples.
Example 4: The step response of an RLC
circuit (Example 1 revisited with initial
conditions). For the parallel RLC circuit
shown in Fig. 5, find the step response of v(t) for t ≥ 0 using the Laplace transform method. The initial conditions
are iL(0−) = 29 mA and vo(0−) = 50 V.
Since all elements are in parallel in the circuit, we choose the Norton representation for the L and C with initial
conditions shown in Fig. 5. The R, L, and C are translated into the impedances R, sL, and 1/sC, respectively. The
input DC current source and the switch are replaced by a step function which is represented as 1/s in the s-domain.
Note that an s-domain current bears a dimension of A⸱s due to the integration of the transform (and for the same
reason a voltage bears a dimension of V⸱s).
The total current is 0 0
1 1,dcI I CV
s s+ + and the total impedance is
11 1
.sCR sL
−
+ + Therefore, the output volt-
age is
( )0
0 0 0
22
1 150 2 5
.1 1 1 1 8 4 1.6 9
dcdc
I II I CV sV
s es s CV s I Zs e s esC s s
R sL RC LC
++ + +
−= = = =
+ ++ + + +
Comparing this result to that of Example 1, ( )( )2
,1 1
dcI CV s
s RC s LC=
+ + we see that the initial conditions of L and
C are automatically and properly handled using the Laplace transform method2.
We need to perform the inverse Laplace transform on V(s) to obtain v(t). But first we need to perform the partial
fraction expansion on V(s):
( )( ) ( )
2 2 2
50 2 5 50 2 5 2.2 6 50.
4 48 4 1.6 9 4 4 4 4
s e s e eV s
s es e s e s e s e
− − −= = = +
++ + + +
And by looking up in Table 3, we have
( ) ( ) ( ) ( )1 4 4 4 42.2 6 50 V.e t e tv t V s e te e u t− − −= = − +L
2 It is a good practice to double check the dimensions of all the quantities in the final expression of V(s): in the numerator, two
terms bear the dimension of V/sec, whereas in the denominator all three terms bear the dimension of 1/sec2; so, the ratio has a
dimension of V⸱sec, as expected for an s-domain voltage.
25 mH
+
t = 024 mA 25 nF500 Ω v(t)
iL(t)
s/40
Ω
+
24/s
mA-s
40/s
MΩ
500
Ωv(t)
1.25
μA-s
29/s
mA-s
( ) 0V s I
sL s+ ( ) 0sC V s CV −
Fig. 5 A parallel RLC circuit with initial energy storage

EE/CE 3301-002 Handout Prof. Y. Chiu
10
Example 5: The series RLC circuit shown in Fig. 6 is driven by
a sinusoidal input ( ) 15cos4 4 V.v t e t= Find i(t) for t ≥ 0 using
the Laplace transform method. No initial energy storage.
First, the R, L, and C are replaced by impedances. The sin-
ewave and the switch together are represented in the s-domain
as
( ) ( ) 2 2
1515cos4 4 V s.
4 4
sV s e t u t
s e= =
+L
The total impedance is 1
.R sLsC
+ + Therefore, the current is
( )
( )( )
2 2
2
2 2 2
15
4 41 8
4 316
240.
4 4 6.4 4 1.6 9
sV s eI s
s eZe
s
s
s e s e s e
+= =+ +
=+ + +
As an extra step, we can also apply the initial- and final-value theorems to check the above expression:
From the initial-value theorem: ( ) ( )( )( )
3
2 2 20
240lim lim 0,
4 4 6.4 4 1.6 9st
si t sI s
s e s e s e+ →→
= = =+ + +
From the final-value theorem: ( ) ( )( )( )
3
0 2 2 2
240lim lim 0.
4 4 6.4 4 1.6 9t s
si t sI s
s e s e s e→ →= = =
+ + +
The theorems correctly predicted i(0+) = 0 as the inductor does not have initial energy storage. But the i(∞) = 0 is
questionable as we know that, driven by a sinusoidal input, the current will not settle to a fixed value when t→∞.
So, what is wrong? It turns out that the final-value theorem does not apply in this case as I(s) has two poles on the
jω-axis! The theorem works only when the transform has all its poles, except one single pole at origin, reside in the
LHP of the s-plane (related to the stability of the system, which is beyond the scope of this note).
Lastly, in order to obtain i(t), we perform the partial fraction expansion on I(s):
( )( )( )
* *21 1 2 2
2 2 2
240.
4 4 4 4 3.2 4 2.4 4 3.2 4 2.4 44 4 6.4 4 1.6 9
K K K KsI s
s j e s j e s e j e s e j es e s e s e= = + + +
− + + − + ++ + +
Solve for K1 and K2, we have K1 = 1.875 3,e− K2 = 3.125 3 126.87 .e− − And finally we have
( )
( ) ( ) ( )
1
3.2 4
1.875 3 1.875 3 3.125 3 126.87 3.125 3 126.87
4 4 4 4 3.2 4 2.4 4 3.2 4 2.4 4
3.75cos4 4 6.25 cos 2.4 4 126.87
steady-state transient
e t
e e e ei t
s j e s j e s e j e s e j e
e t u t e e t u t
−
−
− − − − − = + + +
− + + − + +
= + −
L
mA
We observe that the first term represents the steady-state response of the circuit. It exhibits the same frequency as
the input sinewave and persists for all time. We can also use the phasor technique to solve for this term. The second
term, however, is the transient response of the circuit due to the sudden onset of the sinewave at t = 0 (even the
circuit has zero initial energy storage) and perishes when t→∞. Its characteristics are set by the tank (i.e., R, L and
62.5 mH
t = 0
v(t)
10 nF
4 kΩ i(t)
s/16 Ω
t = 0
1e8/s MΩ
4 kΩ I(s)
2 2
15V s
4 4
s
s e
+
Fig. 6 A series RLC circuit with sinusoidal input

EE/CE 3301-002 Handout Prof. Y. Chiu
11
C values) and independent of the input. Note that the Laplace transform technique properly accounts for all the
initial conditions of the circuit and yields the complete solution for t ≥ 0. In contrast, the phasor technique cannot
solve for the transient part of the circuit response.
Question: The interesting question here is that the circuit has no energy storage at t = 0−, so why it still produces a
transient response for t > 0? The answer lies in the fact that the sinewave is discontinuous at t = 0 when the switch
closes, i.e., had the sinewave been present at all time, the L and C would have some energy stored in them at t = 0.
But we know this is not true as the circuit is initially at rest. So, we postulate that the circuit will produce no transient
response if the L and C have just the right amount of energy stored in them; and then at the onset of the sinewave
at t = 0, it will just produce the steady-state response only, as if it had been driven by the sinewave for a long time
before t = 0.
Exercise: Calculate the initial conditions for the L and C in the above example so no transient response is produced.
(Answer: evaluate the steady-state part of the response at t = 0, we have IL(0−) = 3.75 mA, VC(0−) = 0. If you plug
these values into the circuit and rederive I(s), you should obtain K1 = 1.875e-3, K2 = 0.)
Convolution Integral of LTI System
Suppose the impulse response of a linear time-invariant (LTI)3 system is known, i.e., the system outputs h(t) when
driven by the impulse function δ(t), we want to derive the system response y(t) to a general input x(t). First, we note
the sifting property of the delta function, ( ) ( ) ( ) ,x t x t d +
−
= − which can be viewed as a bunch of time-shifted
delta functions δ(t−τ) weighted by x(τ) to sum up to x(t), i.e., x(t) can be viewed as a “linear combination” of many
individual weighted functions of the form δ(t−τ). Since the system response to δ(t) is known as h(t), by time invar-
iance, the response to δ(t−τ) must be h(t−τ). Then by superposition (or linearity), the LTI system output y(t) in
response to x(t) must be
( ) ( ) ( ) ( ) ( ) ( ), also denoted as .y t x h t d y t x t h t +
−
= − = (32)
The Eq. (32) is called the convolution integral of the LTI system. It reveals that once the impulse response h(t) of
a system is known, its response to an arbitrary input x(t) is also known by virtue of the convolution integral. It is
easy to show that (32) can be equivalently expressed as
( ) ( ) ( ) ( ) ( ) ( ), also denoted as .y t h x t d y t h t x t +
−
= − = (33)
In practice, the convolution integral provides a means to calculate a system’s output directly in the time domain,
without going through the s-domain transforms. It is useful to numerical analysis such as in experiments, wherein
an analytical form of h(t) is unknown.
Transfer Function
We see that, in analyzing circuits using the Laplace transform technique, we
always arrive at an expression of X(s) that has a part of the denominator (as a
polynomial in s) independent of the input signal. For example, in the parallel
RLC circuit, this polynomial is ( )2 1 1 ;s RC s LC+ + and in the series RLC cir-
cuit, it is ( )2 1 .s R L s LC+ + In addition, this part of the denominator seem-
ingly determines the characteristics of the transient or natural response of the
3 A system is linear if the superposition rule applies; it is time-invariant if a time-shifted input will result in a time-shifted
output and nothing else, i.e., if an input x(t) produces an output y(t), then the input x(t−τ) must produce the output y(t−τ).
H(s)
h(t)
X(s)
x(t)
Y(s)
y(t)
Fig. 7 The transfer function of an LTI system

EE/CE 3301-002 Handout Prof. Y. Chiu
12
circuit (recall the characteristic equation in the RLC circuits). To examine this further, we consider the LTI system
shown in Fig. 7, where the system produces an output y(t) when excited by an input x(t). We express the ratio of
the Laplace transforms of the output and input as a new term, the transfer function H(s) of the system:
( )( )( )
.Y s
H sX s
= (34)
In doing so, we also note that we need to ensure that the system is initially at rest, i.e., no energy storage at t = 0.
Otherwise, x(t) will no longer be the sole excitation and the H(s) derived is then ambiguous. The H(s) derived in
(34) is independent of the input X(s). A circuit can produce many transfer functions, depending on where exactly
the input and the output are.
Since the Laplace transform of the delta function is 1, the output of the system in Fig. 7 will be H(s)―with a
time-domain counterpart h(t)―if the input is replaced by δ(t), i.e., H(s) is essentially the Laplace transform of
the impulse response h(t) of the system. Recall we stated before that, once the impulse response of a system is
known, its response to any signal is also known by virtue of the convolution integral. We thus relate the convolution
integral and the transfer function as
( ) ( ) ( ) ( ) ( ) ( ).y t h t x t Y s H s X s⎯⎯⎯→⎯⎯⎯= = L
(35)
The Eq. (35) is of no surprise―we recognize it as the convolution property of the Laplace transform. The impulse
response and the transfer function both characterize a system or circuit, one in the time domain and the other in the
s-domain. The impulse response is also a form of natural response of the system (see Example 6 for the equiva-
lence).
For systems and circuits that can be described by linear, constant-coefficient ordinary differential equations,
H(s) must be rational, i.e.,
( )( )( )
( )( ) ( )
( )( ) ( )
11 21 1 0
11 1 0 1 2
.
n nnn n
m mm mm
s z s z s zN s a s a s a s aH s K
D s b s b s b s b s p s p s p
−−
−−
− − −+ + + += = =
+ + + + − − − (36)
In addition, for circuits with real, positive component values (i.e., pas-
sive components such as R, L, and C), the coefficients {an} and {bm}
of the numerator and denominator polynomials, respectively, must be
real and positive too; thus, the poles and zeros of H(s) either must be
real or appear in complex conjugate pairs. If the system is BIBO
(bounded input, bounded output) stable, all poles of H(s) must reside
in the LHP of the s-plane, whereas the zeros can reside anywhere in
the s-plane. The poles set the neper and resonant frequencies (or the
damping factor and undamped natural frequency) of the circuit. They
are the roots of the denominator polynomial of H(s) (or the roots of
the characteristic equation of the system).
Example 6: Impulse function in circuit analysis.
The circuit shown in Fig. 8(a) is driven by δ(t). Calculate how much
energy is instantaneously deposited into the L and C at t = 0. In Fig.
8(b), the delta function is removed and the 1-μF capacitor now has an
initial voltage of 1000 V. Show that the circuit will produce an identi-
cal output as that of Fig. 8(a).
As δ(t) ≠ 0 only at t = 0, if vL(t) and iC(t) are known for the L and
C, respectively, we can integrate them from 0− to 0+ to determine the
50 mH
δ(t) 1 μF250 Ω
1 kΩ
+
vC(t)
+vL(t)
iC(t)
(a)
50 mH1 μF
250 Ω
1 kΩ t = 0
+
vC(0 )
= 1000 V
(b)
Fig. 8 Equivalence between (a) the impulse function and (b) the initial condition in pro-ducing transient response in circuits

EE/CE 3301-002 Handout Prof. Y. Chiu
13
energy deposited into the storage elements at t = 0. We have
1
2
1,
.
C
LC
C LL
IVsC I
R sL
I VV R
sC sL
−= +
= +
→
1 61
,1 3 50 31 6 250
.50 3
C
LC
C LL
e IVs I
e s ee I V
Vs s e
−= +
−
= +−
Solve, we have
2
2
2
5 3mA s,
6 3 2.5 71 3
V s.6 3 2.5 7
C
L
s e sI
s e s ee s
Vs e s e
+=
+ +
= + +
Note that the rational expression of IC is improper while it is proper for VL. Factoring the expressions,
*1 1
*2 2
1 mA s,3 3 4 3 3 3 4 3
V s.3 3 4 3 3 3 4 3
C
L
K KI
s e j e s e j e
K KV
s e j e s e j e
= + + + − + +
= + + − + +
Since we are integrating from 0− to 0+, we need an impulse function to yield a non-zero result. In the above expres-
sions, only IC will produce a delta function when an inverse Laplace transform is performed. So, we have
( ) ( )
( ) ( ) ( ) ( )
0
0
0 0 0
0 0 0
10 0,
1 1 10 other terms 1 3 V.
L L
C C
i v t dtL
v i t dt t dt dt eC C C
+
−
+ + +
− − −
+
+
= =
= = + =
At this point, we realize that the circuit in Fig. 8(b) essentially bears the initial condition just obtained above. Thus,
the two circuits must produce identical outputs for t > 0.
There is another method to derive the equivalence between the two circuits by inspecting the s-domain equations
directly. We now show how this can be done. Suppose both L and C have initial energy storage, the system equations
can be modified as
01
2 0.
0,C L
C
LLC
V VI
R sL
VV V R
CV
LIsL
−= +
= −+
−
Comparing these equations to those obtained before, we realize that the two sets of equations will be identical if
R1CV0 = 1 and LI0 = 0 hold, which yield V0 = 1e3 V and I0 = 0―this is exactly the initial conditions given in the
circuit of Fig. 8(b).
Transfer Function and Steady-State Sinusoidal Response
We first establish the fact that the exponential function is an eigenfunction of the LTI system. Consider an LTI
system H(s) excited by an exponential input est, the output is given by the convolution integral as

EE/CE 3301-002 Handout Prof. Y. Chiu
14
( ) ( ) ( ) ( ) ( ) ( ) ,s tst st s sty t h t e h e d e h e d H s e
+ +
− −
− −
= = = = (37)
where we used the bilateral Laplace transform instead of the unilateral one. Eq. (37) reveals that convolving h(t)
with est is equivalent to multiplying its Laplace transform H(s) with est, i.e., the function est is an eigenfunction
of the system H(s).
Now suppose the system is driven by a sinusoidal input and we want to find the steady-state response. Using
the Euler identity, we have
( ) ( )2 2
cos .2
j t j t j t j tA Ae e
AA t e e − −
+= = + (38)
Thus, the sinusoidal functions are also eigenfunctions of the LTI system for the special case of s = jω. The steady-
state sinusoidal response of the system can then be expressed as
( ) ( ) ( ) ( )
( ) ( )
( ) ( ) ( ) ( )
( )( ) ( )
( ) ( )
cos2 2
2 2
2 2
2
cos .
j t j t
s j s j
j t j t
j j j jj t j t
j t j j t j
A Ah t A t H s e H s e
A AH j e H j e
A AH j e e H j e e
AH j e e
H j A t j
−
= =−
−
− −
+ − +
= +
= + −
= +
= +
= +
(39)4
Eq. (39) states that the steady-state sinusoidal response of a
system can be obtained by simply weighting the input sin-
ewave by the magnitude of H(s = jω), evaluated at the sin-
ewave frequency ω, and phase-shifting it by the phase of H(s
= jω), also evaluated at the sinewave frequency ω. Thus, si-
nusoidal signals can be used to characterize an LTI system
by sweeping the signal frequency and evaluating the ensuing
magnitude and phase of the output. This technique is widely
used in experiments.
The transfer function H(s) evaluated for the special case
s = jω is called the frequency response of the system (see
Fig. 9),
( ) ( ) ( ) ( ) ( ) ( ).j j
s jH s H j H j e H j j
== = = (40)
The plot of the magnitude and phase responses of ( ) ( ) ( )H j H j j = vs. the frequency ω is called the Bode
plot, an important tool for evaluating LTI systems’ characteristics. To process a wide range of frequencies and
magnitudes, the magnitude plot is often rendered on a log-log scale while the phase plot on a semi-log scale.
4 In (39), we used the fact that H(s*) = H*(s)⸺can be shown as ( ) ( ) ( ) ( )*
*
* *s t stH s h t e dt h t e dt H s+ +
− −
− −
= = = ⸺if h(t) is
real. So, ( ) ( ) ( ) ( )* .j j
H j H j H j e
−
− ==
jω
σ0
s-planeH(s = jω)
Fig. 9 Frequency response of an LTI system can be obtained by evaluating H(s) on the jω-axis.

EE/CE 3301-002 Handout Prof. Y. Chiu
15
Example 7: Plot the following transfer
function in MATLAB.
( )1
.1
H ss
=+
The transfer function has one pole
at s = −1 rad/s and a zero at ∞. The fol-
lowing MATLAB commands generate
the Bode plot in Fig. 10.
>> H = tf(1, [1 1])
>> bode(H)
The magnitude response ( )H j
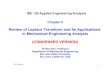
displays a lowpass characteristic, i.e.,
it rolls off at high frequencies. The
low-frequency gain is 1 (or 0 dB), and
the gain asymptotically approaches 0
(or −∞ dB) with a roll-off slope of −20
dB/decade (or −6 dB/octave) at high
frequencies.
The phase ( )j starts off at 0°
and decreases asymptotically to −90°
at high frequencies.
We also note here the behavior of
the magnitude and phase responses at
the proximity of the pole frequency,
i.e., ( )H j and ( )j evaluated
at ω = 1 rad/s:
( )1 rad/s
1 rad/s
1
1
1 or 3.01 dB
2
H jj
=
=
=+
= −
and
( )1 rad/s
1
1
45 or .4
jj
= =
+
= − −
The angular frequency 1 rad /s is termed the −3-dB bandwidth (ω–3-dB) of the system H(s).
Example 8: Plot the following transfer function in MATLAB.
( ) 2
1.
2 1H s
s s=
+ +
Fig. 10 Bode plot of the first-order lowpass transfer function in Example 7
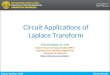
Fig. 11 Bode plot of the second-order lowpass transfer function in Example 8

EE/CE 3301-002 Handout Prof. Y. Chiu
16
The transfer function has two poles at s = −1 rad/s and two zeros at ∞. The following MATLAB commands
generate the Bode plot in Fig. 11.
>> H = tf(1, [1 2 1])
>> bode(H)
The magnitude response ( )H j still displays a lowpass characteristic. In this case, the low-frequency gain is
still 1 (or 0 dB), but the gain rolls off now with a slope of −40 dB/decade (or −12 dB/octave) at high frequencies
(due to the double poles).
The phase ( )j starts off at 0° and decreases gradually to −180° at high frequencies.
At the pole frequency, i.e., at ω = 1 rad/s, we have
( )( )
21 rad/s
1 rad/s
1 1 or 6.02 dB
21H j
j
=
=
= = −+
and
( )( )
21 rad/s
190 or .
21j
j
= = = − −
+
The −3-dB bandwidth (ω–3-dB) of the system H(s) is therefore no longer at ω = 1 rad/s⸺it is instead at a lower
frequency.
The transfer function in Example 7 is a first-order lowpass function and that of Example 8 is a second-order
lowpass function. The order of a transfer function H(s) is determined by its number of poles.
Exercise: calculate the −3-dB bandwidth of the transfer function H(s) in Example 8.
(Answer: equate ( )H j to −3-dB and solve, we obtain ω−3-dB = 0.644 rad/s.)