Embed Size (px)
Citation preview

G.U.N.T. Gerätebau GmbH, Hanskampring 15-17, 22885 Barsbüttel, Germany
Phone: +49 40 670854-0, E-mail: [email protected], Web: www.gunt.de
SYSTEME FÜR DIE TECHNISCHE AUSBILDUNG
EQUIPMENT FOR ENGINEERING EDUCATION
LABORATORY PROPOSAL
for Engineering Colleges
C23 Statics and Dynamics
Contents: 1) Subjects & Learning Topics Covered
2) Schedule of Requirements
3) Equipment Overview (Poster)

SYSTEME FÜR DIE TECHNISCHE AUSBILDUNG
EQUIPMENT FOR ENGINEERING EDUCATION
C23 Statics and Dynamics Laboratory
1) Covered subjects based on the curricula of Engineering Colleges
The major topics of learning of this laboratory include – but are not limited to – the following activities:
familiarisation with a crank mechanism with fixed and oscillating cylinder
investigation of a revolving crank slider
conversion of a uniform rotary motion into a purely harmonic reciprocating motion
influence of crank length and input angle on the output stroke
recording the transmission function of a crank slider
investigation of the mechanical relationships on the four-joint link
investigation of the principle of the crank-rocker mechanism, double rocker mechanism and double crank
verification of the Grashof condition by varying the crank radius, oscillation radius and coupling length
representation of the non-uniform transmission of a universal joint
determine the gimbal error
how the arrangement of the universal joints and the deflection angle affect the gimbal error
verifying Ackermann’s steering principle
calculate the wheelbase
determine the lead angle and the steering error
investigation of single-stage or multistage spur gears
investigation of planetary gears
determine the transmission ratio
investigation of the centrifugal force as a function of o the speed o the size of the rotating mass
the rotation radius
inertial or apparent force
interference of a rotational movement on a translational movement
visualisation of the Coriolis force effect
investigation of the inertia of rigid bodies in rotational motion
determine mass moments of inertia of different, regularly shaped bodies
investigation of the mass moment of inertia as a function of the radius
proof of the law of falling bodies on the inclined plane
influence of the mass of a body on its acceleration
determine the mass moment of inertia by rolling experiment and pendulum experiment
Steiner’s theorem
dynamic fundamental law of rotational movement
experimental verification of the gyroscopic laws
familiarisation with the three gyro axes

SYSTEME FÜR DIE TECHNISCHE AUSBILDUNG
EQUIPMENT FOR ENGINEERING EDUCATION
calculation of gyroscopic moments
study the effect of precession
kinetics and kinematics of the following centrifugal systems o Porter governor o Proell governor o Hartnell governor
adjustment of centrifugal governors
recording the governor characteristic curves and setting curves
calculation of the structural design and adjustment of different governors
determining angular acceleration and mass moment on gears
determining friction and gear efficiency
oscillation period and centre of gravity of rod pendulum
reduced pendulum length and centre of inertia of the rod pendulum
influence of thread length on the oscillation period
determine the oscillation period as a function of o the length of the torsion bar o the diameter of the torsion bar
the rotating mass and its shape
determine the rigidity of a helical spring
determine the natural frequency of a spring-mass system
investigate the effect of mass and mass distribution
difference between static and dynamic friction
friction forces as a function of o normal force o sliding velocity (relative velocities of the friction partners) o material pairing o surface properties of the friction partners o size of the contact area
slip/stick effect
determination of friction coefficients
resulting shape of the contact area under point contact with different radii of curvature
shape of the contact area as a function of the contact force
influence of an additional transverse component of the contact force
fundamentals of the equilibrium of moments: acting forces, generated moments and equilibrium
effect of forces as a function of pulley diameter
relation between power savings and cable route
determination of the friction coefficients of various material pairings
transition from static to dynamic
static equilibrium of forces on the inclined plane
determination of the angle of inclination as from which sliding occurs (calculation and verification by experiment)
effect of wrap angle, coefficient of friction and cable force (Eytelwein’s belt friction formula)
comparison of flat belts and V-belts
consequences of an unadapted V-belt groove

SYSTEME FÜR DIE TECHNISCHE AUSBILDUNG
EQUIPMENT FOR ENGINEERING EDUCATION
2) Schedule of requirements
Item No. Description Code Quantity
Item 1 Kinematic model: crank mechanism KI 110 1 pcs.
Item 2 Kinematic model: crank slider KI 120 1 pcs.
Item 3 Kinematic model: four-joint link KI 130 1 pcs.
Item 3 Kinematic model: Whitworth quick return mechanism KI 140 1 pcs.
Item 4 Kinematic model: Hooke's coupling KI 150 1 pcs.
Item 5 Kinematic model: Ackermann steering mechanism KI 160 1 pcs.
Item 6 Kinematic model: gear drive GL 105 1 pcs.
Item 7 Centrifugal force TM 600 1 pcs.
Item 8 Coriolis force TM 605 1 pcs.
Item 9 Rotational inertia TM 610 1 pcs.
Item 10 Rolling disk on inclined plane TM 611 1 pcs.
Item 11 Kinetic model: flywheel TM 612 1 pcs.
Item 12 Gyroscope TM 630 1 pcs.
Item 13 Centrifugal governor TM 632 1 pcs.
Item 14 Dynamic behaviour of multistage spur gears GL 210 1 pcs.
Item 15 Dynamic behaviour of multistage planetary gears GL 212 1 pcs.
Item 16 Rod and gravity pendulum TM 161 1 pcs.
Item 17 Bifilar/trifilar suspension of pendulums TM 162 1 pcs.
Item 18 Torsional vibrations TM 163 1 pcs.
Item 19 Coil spring vibrations TM 164 1 pcs.
Item 20 Dry friction TM 210 1 pcs.
Item 21 Hertzian pressure TM 262 1 pcs.
Item 22 Equilibrium of moments on pulleys TM 121 1 pcs.
Item 23 Equilibrium of moments on a differential pulley block TM 122 1 pcs.
Item 24 Friction on the inclined plane TM 225 1 pcs.
Item 25 Belt drive and belt friction TM 220 1 pcs.

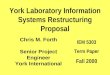
Dynamics: kinematics Dynamics: kinetics Dynamics: vibrations
Statics
E q u i p m e n t f o r e n g i n e e r i n g e d u c a t i o n
KI 110Kinematic model: crank mechanism Conversion of rotary motion into oscillating motion
TM 610Rotational inertiaMoments of inertia of different mass arrangements and bodies
KI 140Kinematic model: Whitworth quick return mechanismUneven reciprocating motion with slow feed and quick return
TM 600Centrifugal forceLaws on the behaviour of centrifugal forces on rotating masses
GL 105Kinematic model: gear driveInvestigation of transmission ratios on spur gear units
GL 210Dynamic behaviour of multistagespur gearsInvestigation of the dynamics of rotation of one-, two- and three- stage spur gear units
TM 161Rod and gravity pendulumComparison of physical and mathematical pendulum
TM 163Torsional vibrationsDetermination of the oscillation period depending on torsion wire length, diameter and rotating mass
KI 120Kinematic model: crank sliderConversion of a uniform rotary motion into a pure harmonic reciprocating motion
TM 611Rolling disk on inclined planeDetermining moment of inertia on rotating masses by rolling down an inclined plane and by performing a pendulum test
KI 150Kinematic model: Hooke’s couplingPhenomenon of the gimbal error in Hooke’s couplings and how to avoid it
TM 630GyroscopeExperimental verification of the laws of gyroscopes
GL 212Dynamic behaviour of multistageplanetary gearsInvestigation of rotational dynamics of a two-stage epicyclic gear withthree planetary gears each
TM 162Bifilar/trifilar suspension of pendulumsMoments of inertia of different bodies in a rotary pendulum experiment
TM 164Coil spring vibrationsInvestigation of vibrations on a spiral spring rotating mass system
KI 130Kinematic model: four-joint linkConversion of rotary motion into oscillating motion
TM 612Kinetic model: flywheelExperimental determination of the moment of mass inertia of a flywheel
KI 160Kinematic model: Ackermann steering mechanismDetermining the lead angle of a steering trapezoid
TM 632Centrifugal governorCharacteristic curves of different centrifugal force governors
TM 605Coriolis forceDemonstration of the coriolis force in rotating reference system
TM 210Dry frictionA range of experiments relating to static and dynamic friction
TM 121Equilibrium of moments on pulleysClear demonstration of theequilibrium of moments
TM 220Belt friction apparatusInvestigating the influence of the angle of contact, coefficient of friction and belt force on belt drives and belt friction
TM 262Hertzian pressureDemonstration of theresulting characteristicsof the contact area as a function of the contact force
TM 122Equilibrium of moments on a differential pulley blockEquilibrium of forces andmoments and the demonstration of the force reduction on adifferential pulley block
TM 225Friction on the inclined planeExperiments to understand the fundamentals of mechanical friction on an inclined plane
Theory of machines
Statics and dynamics
Made in Germany
Please refer online to our lab proposals at www.gunt.de · services · download · lab proposal
In accordance to curricula of engineering colleges
G.U.N.T. Gerätebau GmbH
Hanskampring 15 -17D-22885 BarsbüttelGermany
phone: +49 (0) 40 67 08 54 - 0fax: +49 (0) 40 67 08 54 - 42e-mail: [email protected]