Embed Size (px)
Citation preview
G404 Geobiology Fall 2013
Name __________________________________
Lab 7 Locomotor mechanics
The following skeletons are available for this lab. The three exercises all use the same skeleton so you might read them all before starting.
Ambulatory locomotion Procyon lotor, Raccoon (placental mammal) Didelphis virginiana, Virginia opossum (marsupial mammal)
Scansorial/Arboreal locomotion Sciurus niger (=S. rufiventer), Fox squirrel (placental mammal) Choloepus didactylus, Two-toed sloth (placental mammal)
Cursorial locomotion Vulpes vulpes (=V. fulva), Red fox (placental mammal) Gazella thompsonii, Thompson’s gazelle (placental mammal)
Saltatorial locomotion Sylvilagus floridanus, Eastern cottontail (placental mammal) Macropus robustus, Wallaroo (marsupial mammal)
Aquatic/Natatorial locomotion Lontra canadensis (=Lutra canadensis), River otter (placental mammal) Phoca vitulina, Harbor seal (placental mammal)
2
1. Limb segment proportions
The limb can be thought of as three or more segments: the humerus or femur (stylopodium), the radius/ulna or tibia/fibula (zeugopodium), and the manus/pes (autopodium). In some groups, the scapula and pelvis are added as additional segments, and in some groups the digits are elongated to become segments in their own right. The number of segments and their proportional length vary considerably in animals with different locomotor styles. Proportionally long distal segments increase the gear ratio of the limb and are typical of cursors, proportionally long proximal segments decrease the gear ratio and are typical of fossorial, natatorial, and graviportal specialists.
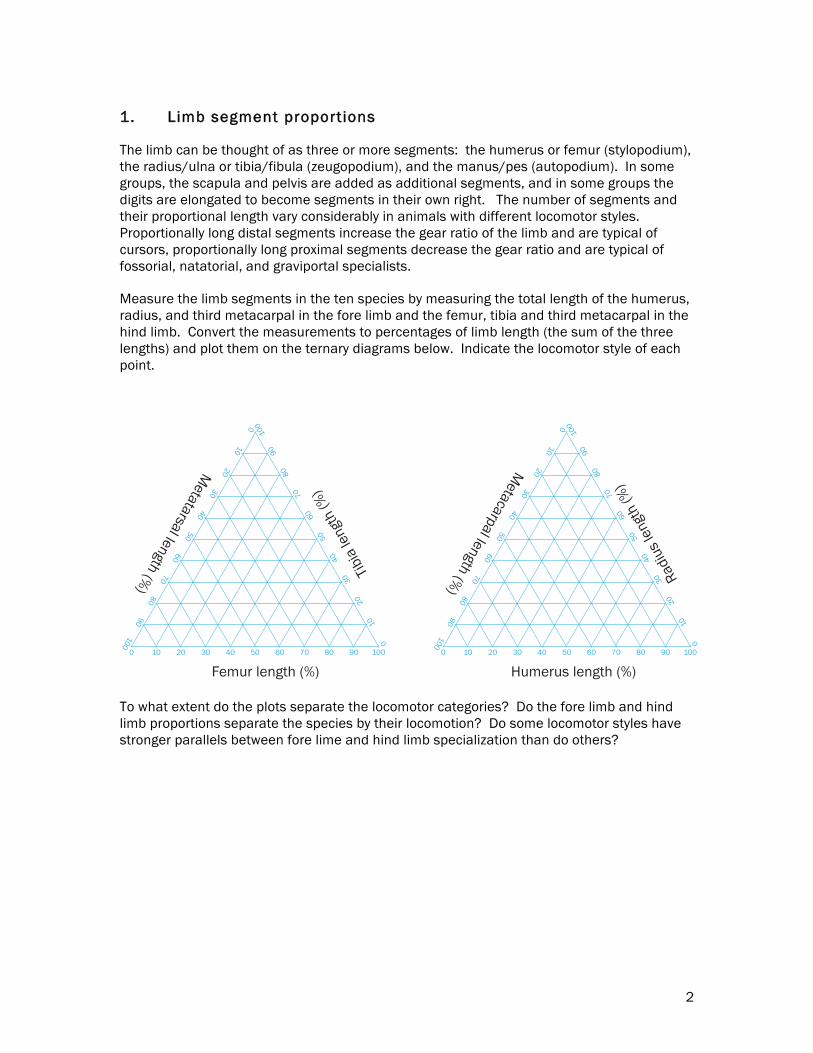
Measure the limb segments in the ten species by measuring the total length of the humerus, radius, and third metacarpal in the fore limb and the femur, tibia and third metacarpal in the hind limb. Convert the measurements to percentages of limb length (the sum of the three lengths) and plot them on the ternary diagrams below. Indicate the locomotor style of each point.
To what extent do the plots separate the locomotor categories? Do the fore limb and hind limb proportions separate the species by their locomotion? Do some locomotor styles have stronger parallels between fore lime and hind limb specialization than do others?
0 10 20 30 40 50 60 70 80 90 100
0
10
20
30
40
50
60
70
80
90
10
00
10
20
30
40
50
60
70
80
90
10
0
0 10 20 30 40 50 60 70 80 90 100
0
10
20
30
40
50
60
70
80
90
10
00
10
20
30
40
50
60
70
80
90
10
0
Femur length (%) Humerus length (%)
Meta
carp
al le
ngth
(%)
Meta
tars
al le
ngth
(%)
Tib
ia length
(%
)
Radiu
s length
(%
)
3
2. Lever mechanics
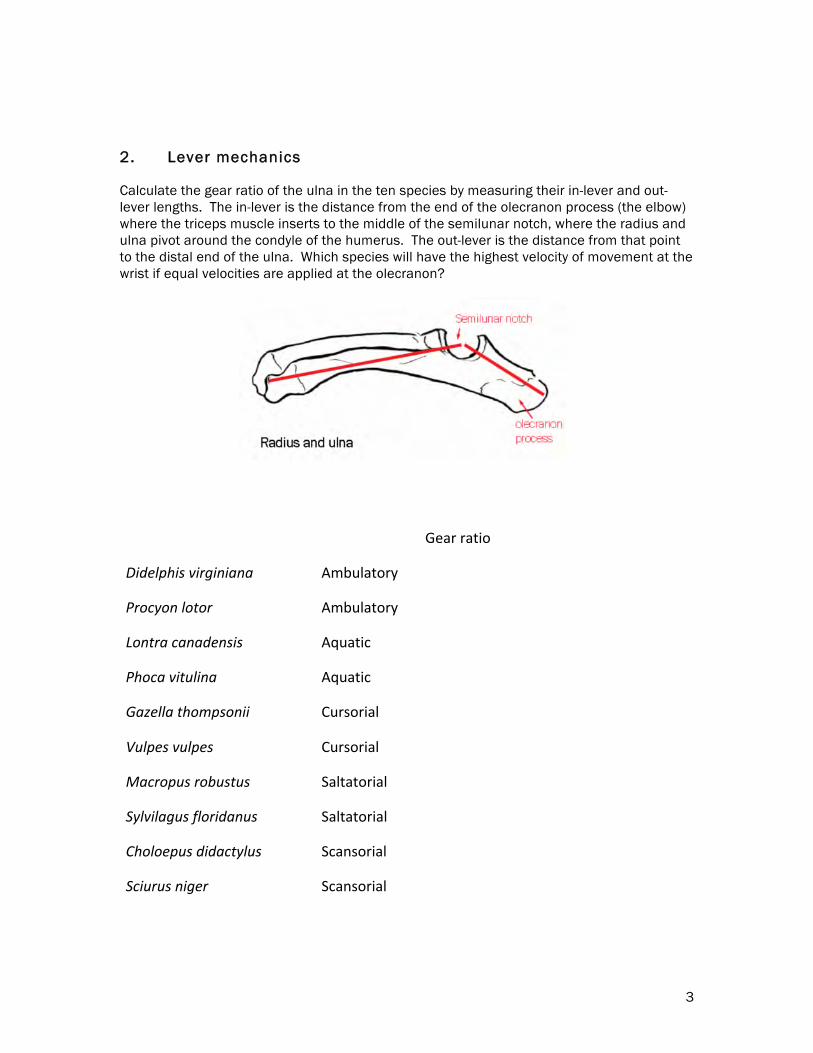
Calculate the gear ratio of the ulna in the ten species by measuring their in-lever and out-lever lengths. The in-lever is the distance from the end of the olecranon process (the elbow) where the triceps muscle inserts to the middle of the semilunar notch, where the radius and ulna pivot around the condyle of the humerus. The out-lever is the distance from that point to the distal end of the ulna. Which species will have the highest velocity of movement at the wrist if equal velocities are applied at the olecranon?
Gear ratio
Didelphis virginiana Ambulatory
Procyon lotor Ambulatory
Lontra canadensis Aquatic
Phoca vitulina Aquatic
Gazella thompsonii Cursorial
Vulpes vulpes Cursorial
Macropus robustus Saltatorial
Sylvilagus floridanus Saltatorial
Choloepus didactylus Scansorial
Sciurus niger Scansorial
4
3. Pronation, supination and the radial head
Pronation and supination mean turning the manus palm down and palm up respectively. Some animals, like cats and humans, can easily invert their hand this way, others, like dogs and deer, cannot. Pronation and supination are advantageous for climbing, manipulating food, and digging, but they are disadvantageous for high-speed locomotion or bearing heavy weight. One structural feature that is associated with pronation and supination is the shape of the radial head, the cup-shaped depression at the proximal end of the radius: the rounder the head, the better the ability to pronate and supinate.
Diagram the shape of the radial head in three species, one cursorial, one scansorial, and one of your choice. Which species probably have the strongest pronation/supination ability based on this feature?
5
Locomotor Information
General principles
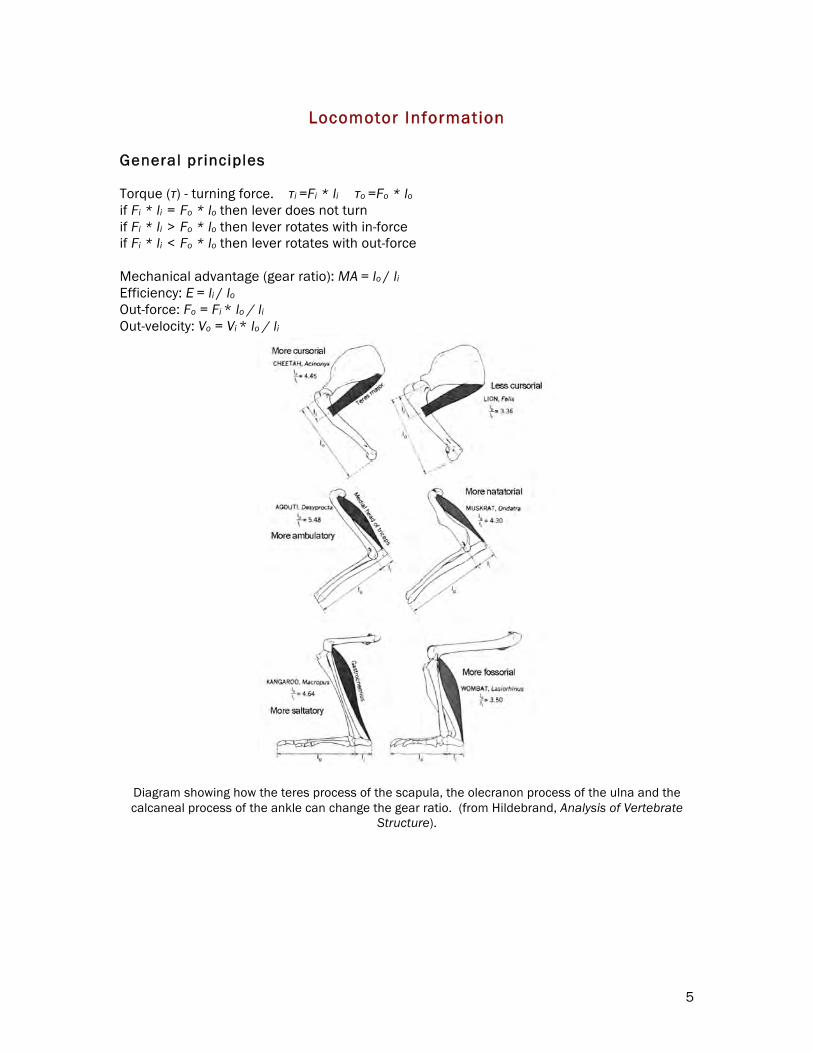
Torque (τ) - turning force. τi =Fi * li τo =Fo * lo
if Fi * li = Fo * lo then lever does not turn if Fi * li > Fo * lo then lever rotates with in-force if Fi * li < Fo * lo then lever rotates with out-force Mechanical advantage (gear ratio): MA = lo / li Efficiency: E = li / lo
Out-force: Fo = Fi * lo / li Out-velocity: Vo = Vi * lo / li
Diagram showing how the teres process of the scapula, the olecranon process of the ulna and the calcaneal process of the ankle can change the gear ratio. (from Hildebrand, Analysis of Vertebrate
Structure).
6
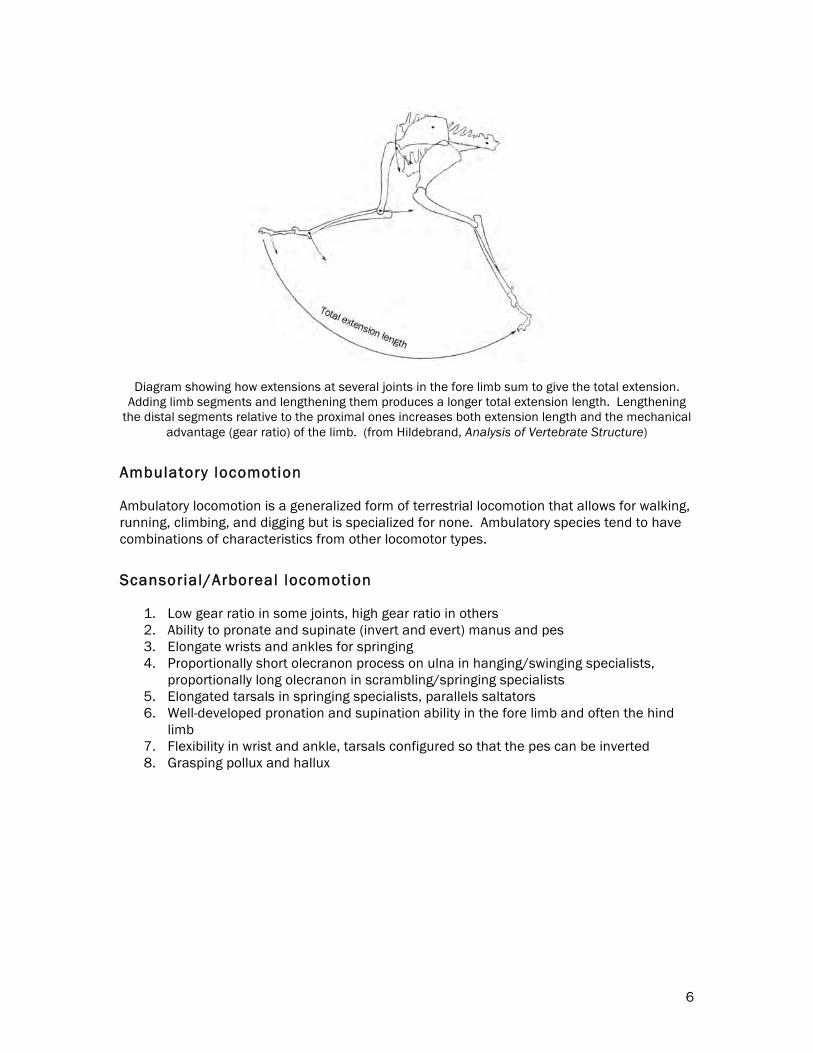
Diagram showing how extensions at several joints in the fore limb sum to give the total extension. Adding limb segments and lengthening them produces a longer total extension length. Lengthening
the distal segments relative to the proximal ones increases both extension length and the mechanical advantage (gear ratio) of the limb. (from Hildebrand, Analysis of Vertebrate Structure)
Ambulatory locomotion
Ambulatory locomotion is a generalized form of terrestrial locomotion that allows for walking, running, climbing, and digging but is specialized for none. Ambulatory species tend to have combinations of characteristics from other locomotor types.
Scansorial/Arboreal locomotion
1. Low gear ratio in some joints, high gear ratio in others 2. Ability to pronate and supinate (invert and evert) manus and pes 3. Elongate wrists and ankles for springing 4. Proportionally short olecranon process on ulna in hanging/swinging specialists,
proportionally long olecranon in scrambling/springing specialists 5. Elongated tarsals in springing specialists, parallels saltators 6. Well-developed pronation and supination ability in the fore limb and often the hind
limb 7. Flexibility in wrist and ankle, tarsals configured so that the pes can be inverted 8. Grasping pollux and hallux
7
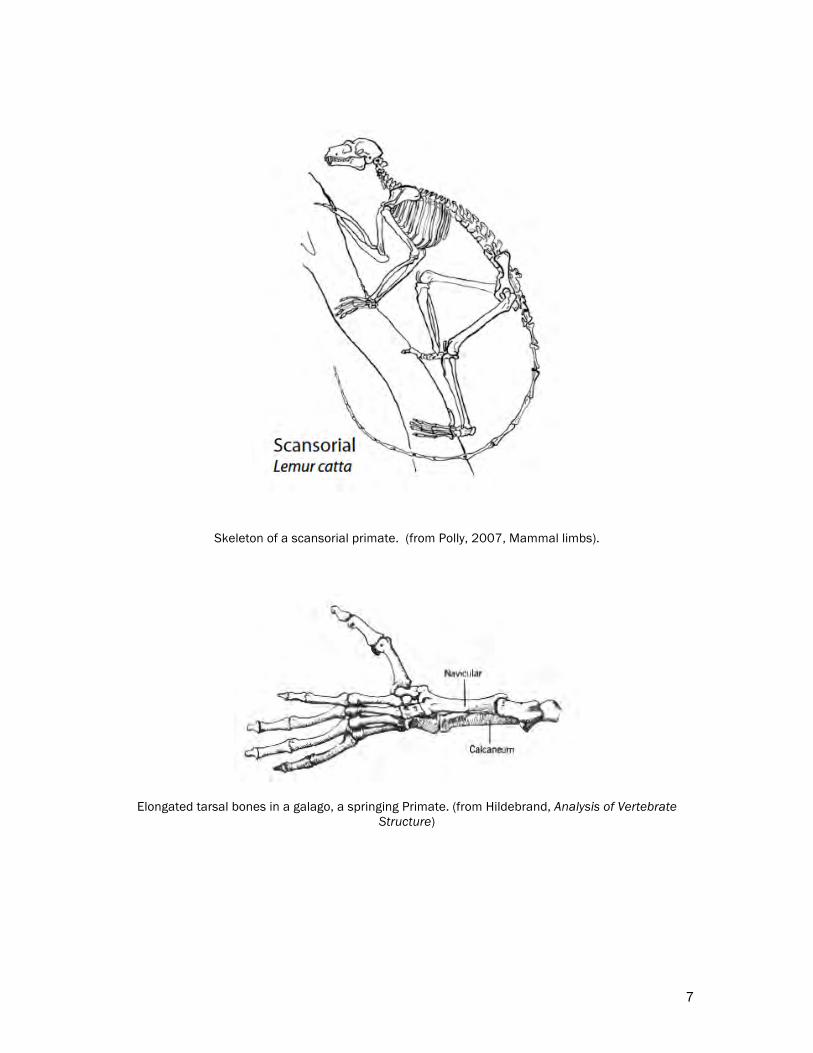
Skeleton of a scansorial primate. (from Polly, 2007, Mammal limbs).
Elongated tarsal bones in a galago, a springing Primate. (from Hildebrand, Analysis of Vertebrate Structure)
8
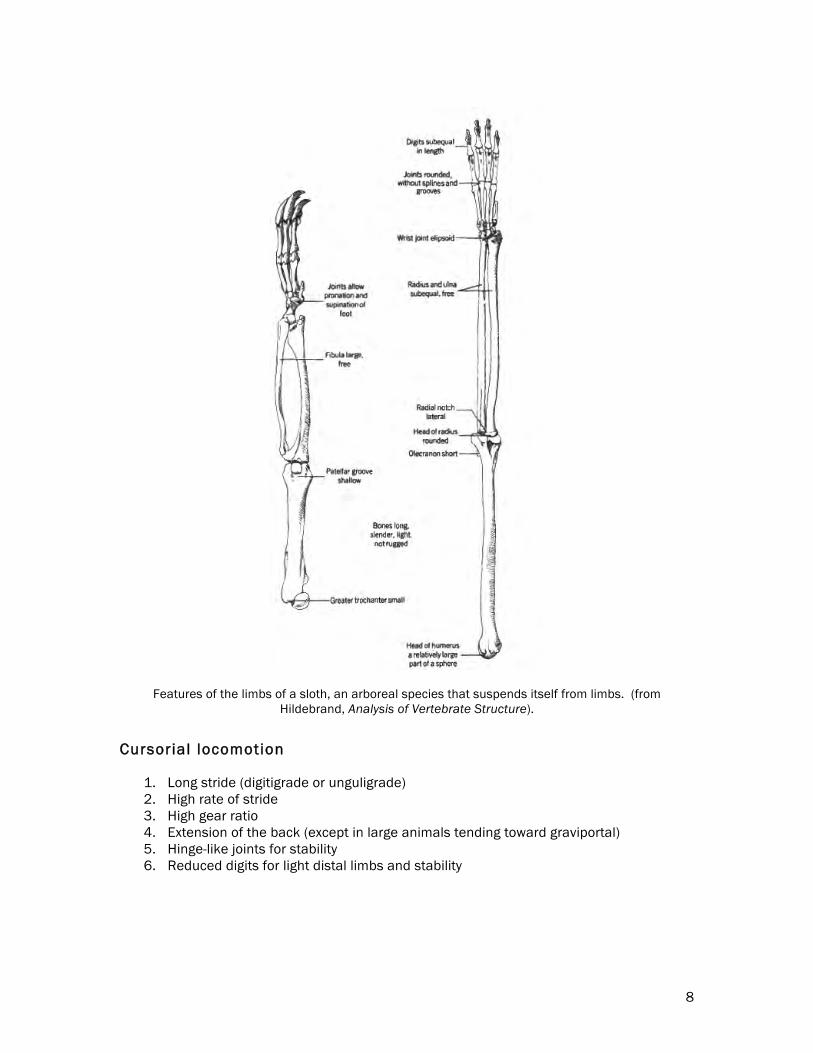
Features of the limbs of a sloth, an arboreal species that suspends itself from limbs. (from Hildebrand, Analysis of Vertebrate Structure).
Cursorial locomotion
1. Long stride (digitigrade or unguligrade) 2. High rate of stride 3. High gear ratio 4. Extension of the back (except in large animals tending toward graviportal) 5. Hinge-like joints for stability 6. Reduced digits for light distal limbs and stability
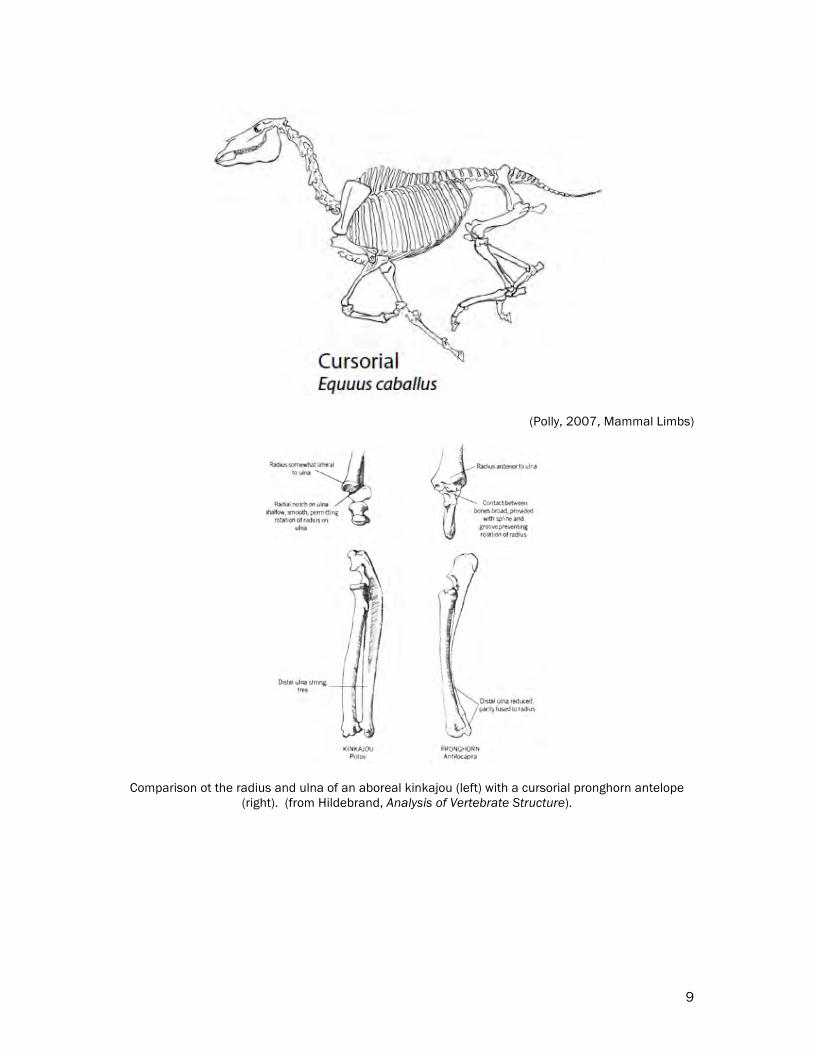
9
(Polly, 2007, Mammal Limbs)
Comparison ot the radius and ulna of an aboreal kinkajou (left) with a cursorial pronghorn antelope (right). (from Hildebrand, Analysis of Vertebrate Structure).
10
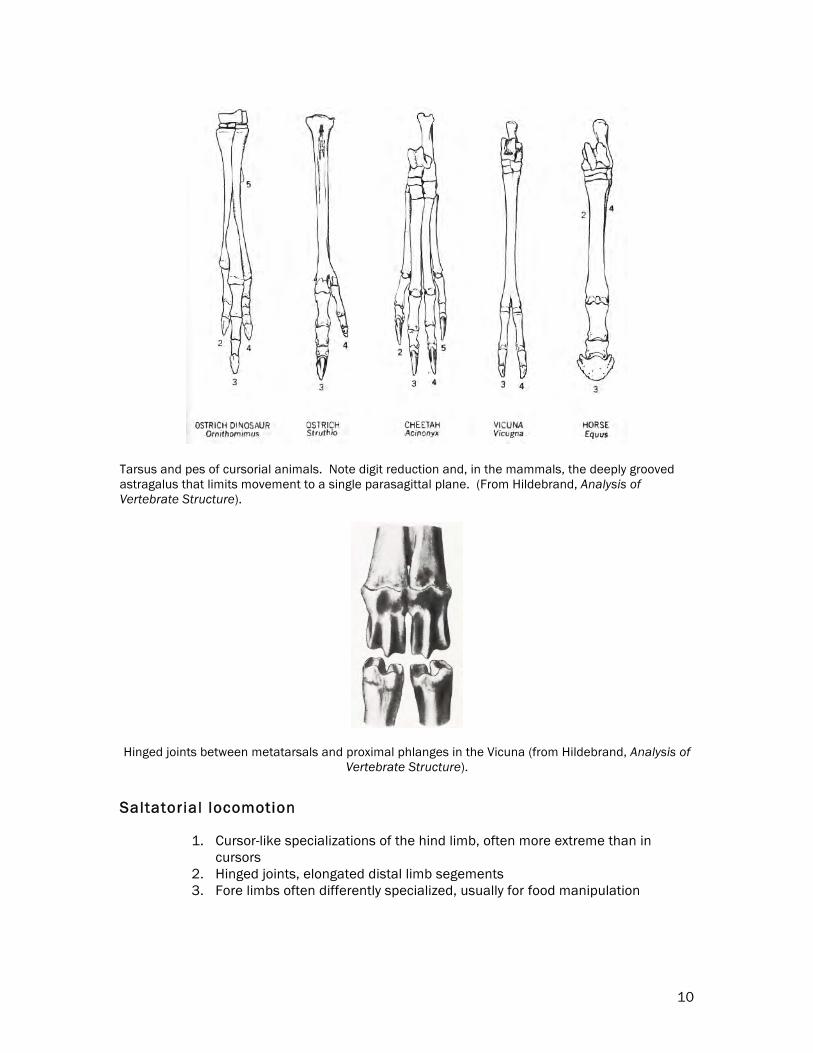
Tarsus and pes of cursorial animals. Note digit reduction and, in the mammals, the deeply grooved astragalus that limits movement to a single parasagittal plane. (From Hildebrand, Analysis of Vertebrate Structure).
Hinged joints between metatarsals and proximal phlanges in the Vicuna (from Hildebrand, Analysis of Vertebrate Structure).
Saltatorial locomotion
1. Cursor-like specializations of the hind limb, often more extreme than in cursors
2. Hinged joints, elongated distal limb segements 3. Fore limbs often differently specialized, usually for food manipulation

11
Comparison of the distal humerus (top) and carpus (bottom) of saltators (left) and arboreal species (right). (from Hildebrand, Analysis of Vertebrate Structure).
Fossorial locomotion
1. Plantigrade 2. Low gear ratio 3. Specialized claws 4. Large acromion and teres processes on scapula 5. Large deltoid crest on proximal humerus and large lateral condyle and supinator
ridge (the point of origin for muscles that invert or supinate the manus, or hand) on distal humerus
6. Proportionally long olecranon process on ulna
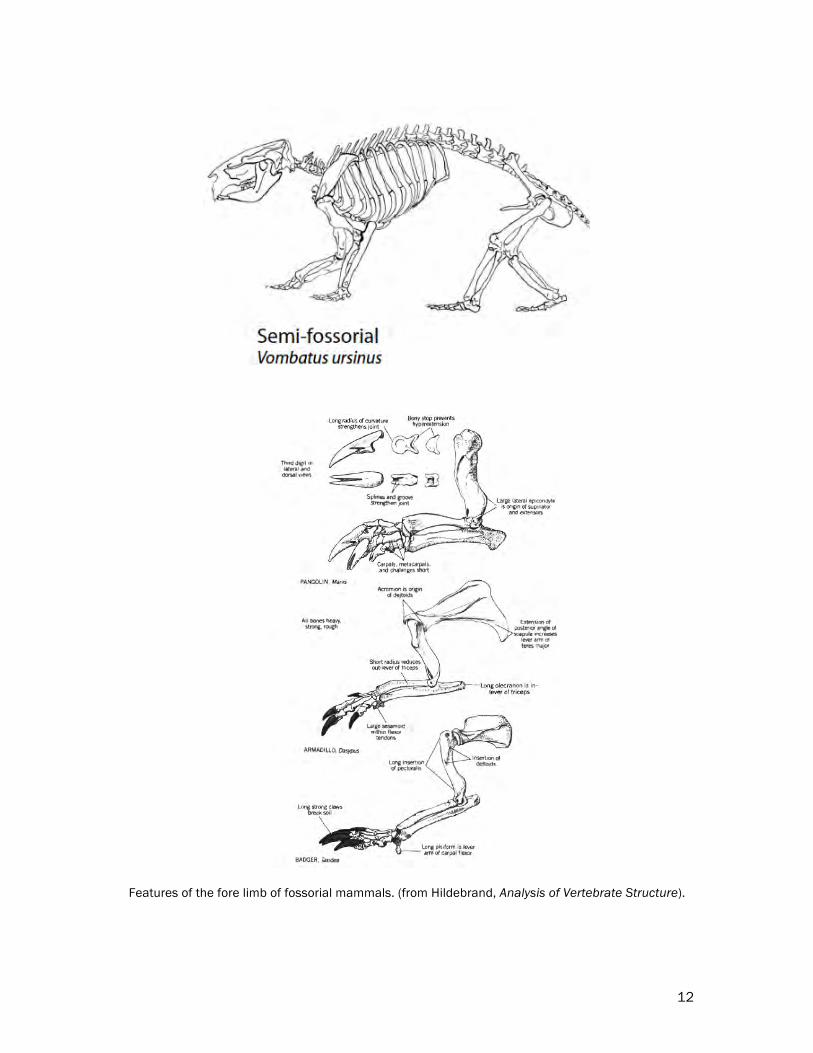
12
Features of the fore limb of fossorial mammals. (from Hildebrand, Analysis of Vertebrate Structure).
13
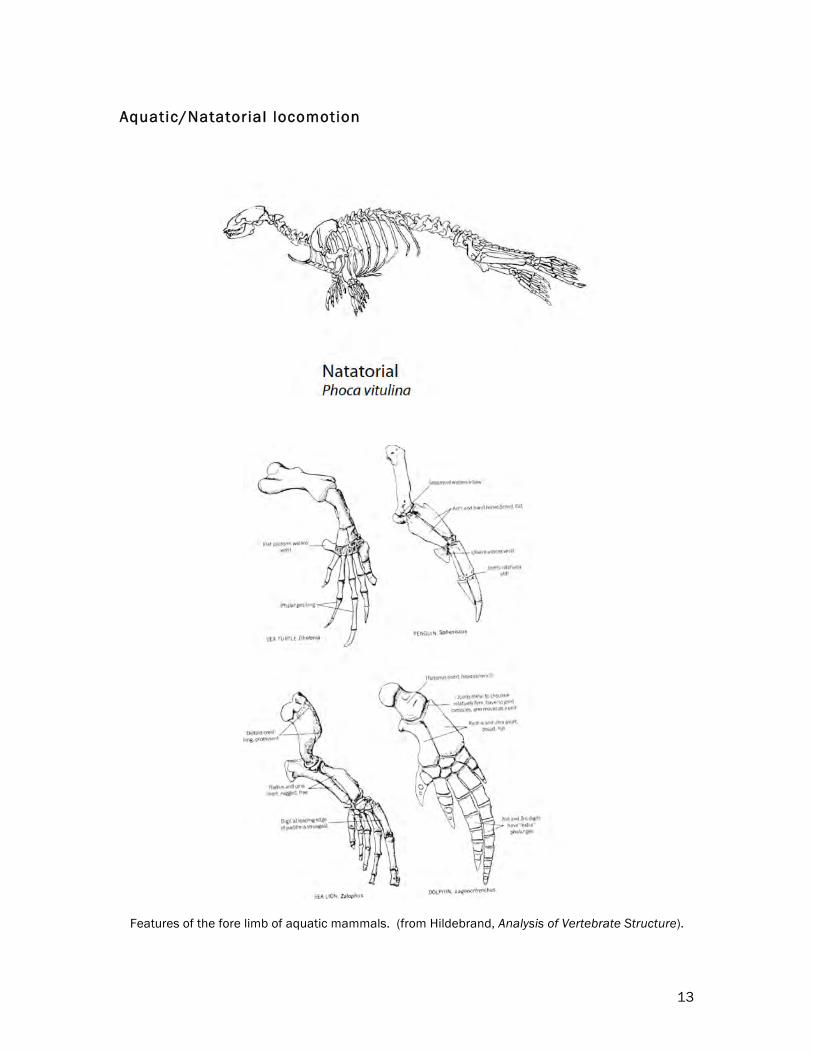
Aquatic/Natatorial locomotion
Features of the fore limb of aquatic mammals. (from Hildebrand, Analysis of Vertebrate Structure).
14
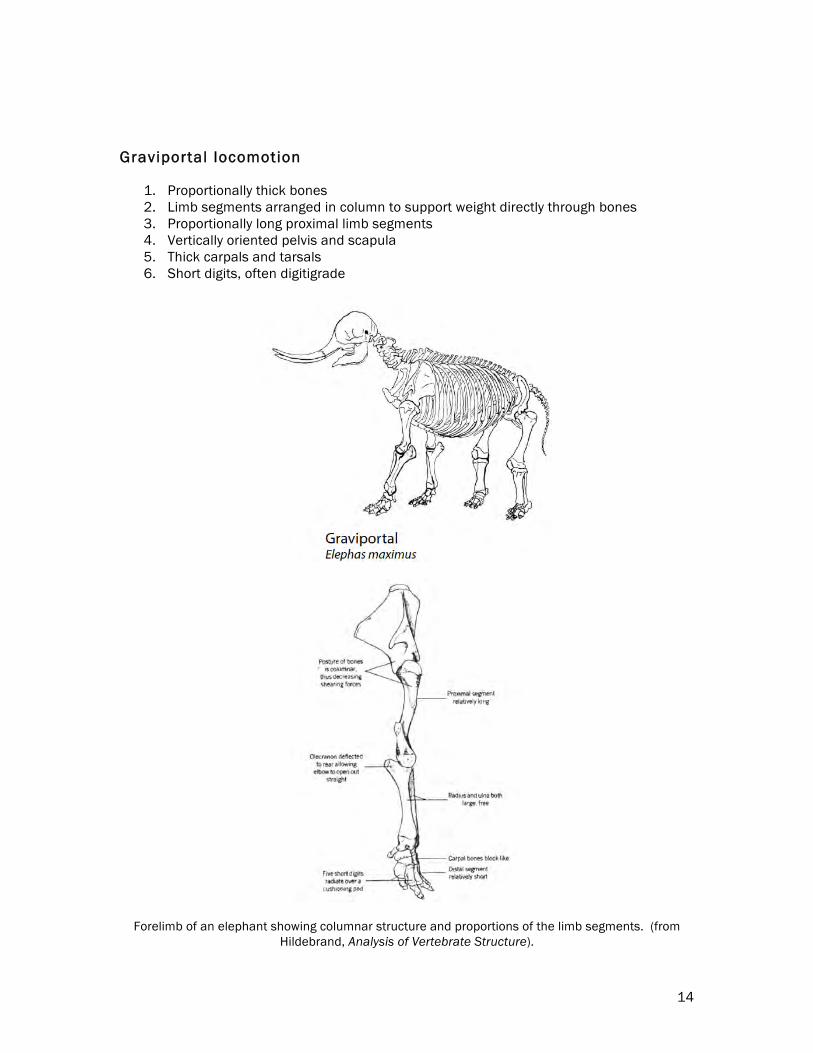
Graviportal locomotion
1. Proportionally thick bones 2. Limb segments arranged in column to support weight directly through bones 3. Proportionally long proximal limb segments 4. Vertically oriented pelvis and scapula 5. Thick carpals and tarsals 6. Short digits, often digitigrade
Forelimb of an elephant showing columnar structure and proportions of the limb segments. (from Hildebrand, Analysis of Vertebrate Structure).





























