Embed Size (px)
Citation preview
Automation Programming
Lab 4
Digital PID Controller
2
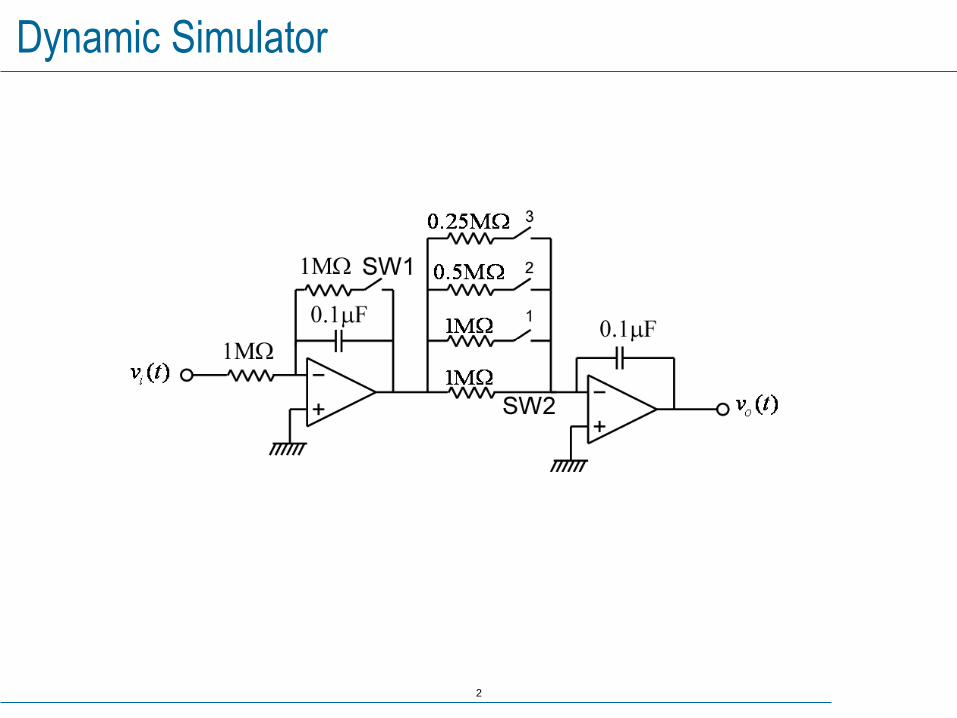
Dynamic Simulator
3
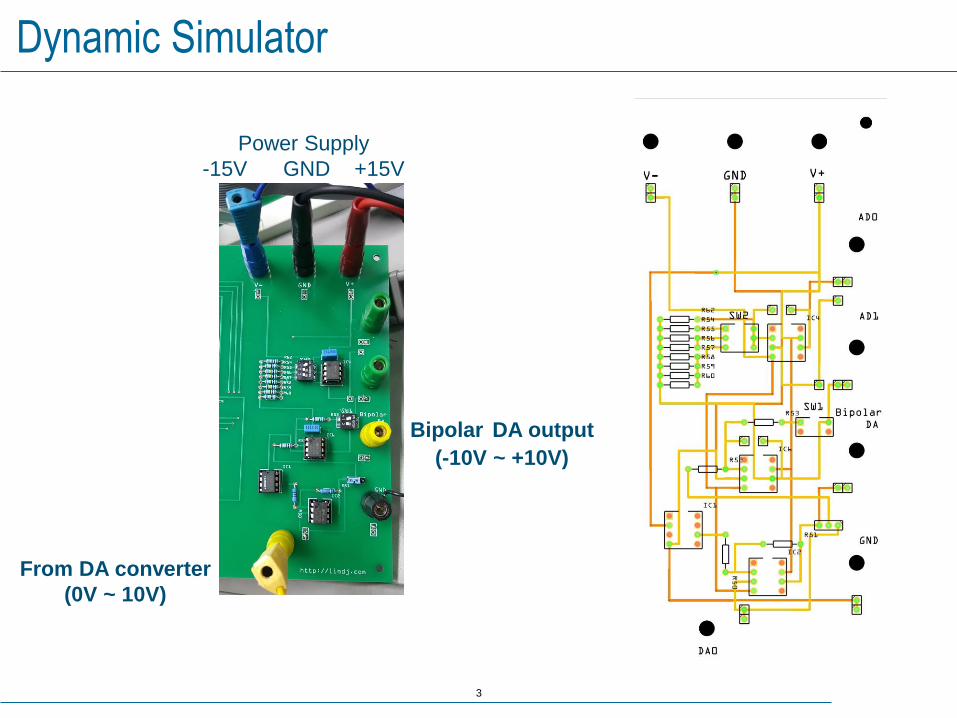
Dynamic Simulator
From DA converter
(0V ~ 10V)
Bipolar DA output
(-10V ~ +10V)
Power Supply
-15V GND +15V
4
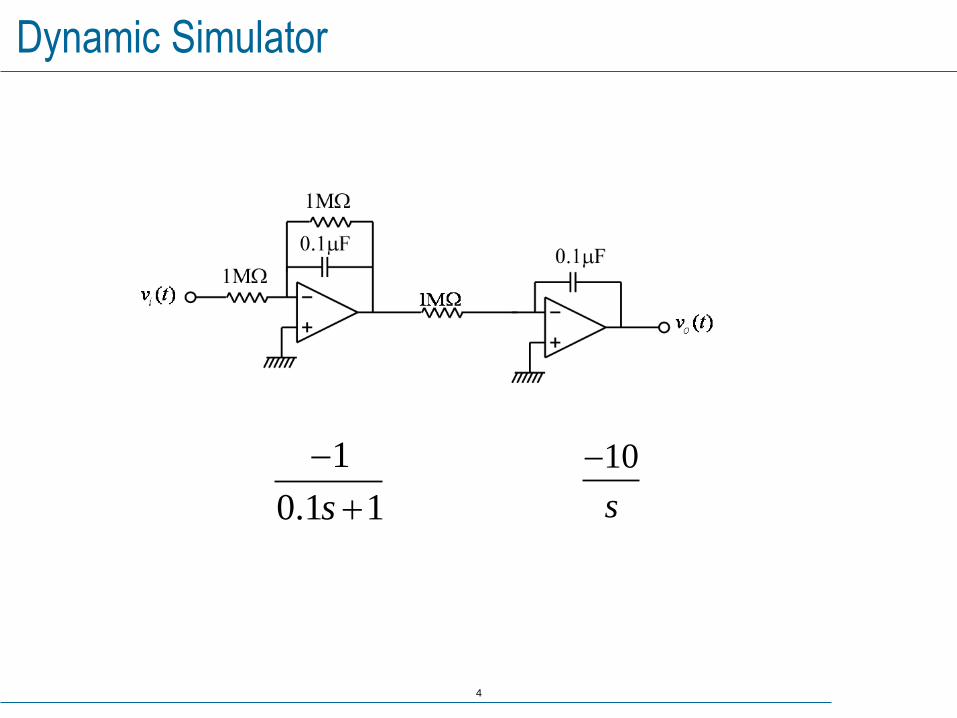
Dynamic Simulator
1
0.1 1s
10
s
5
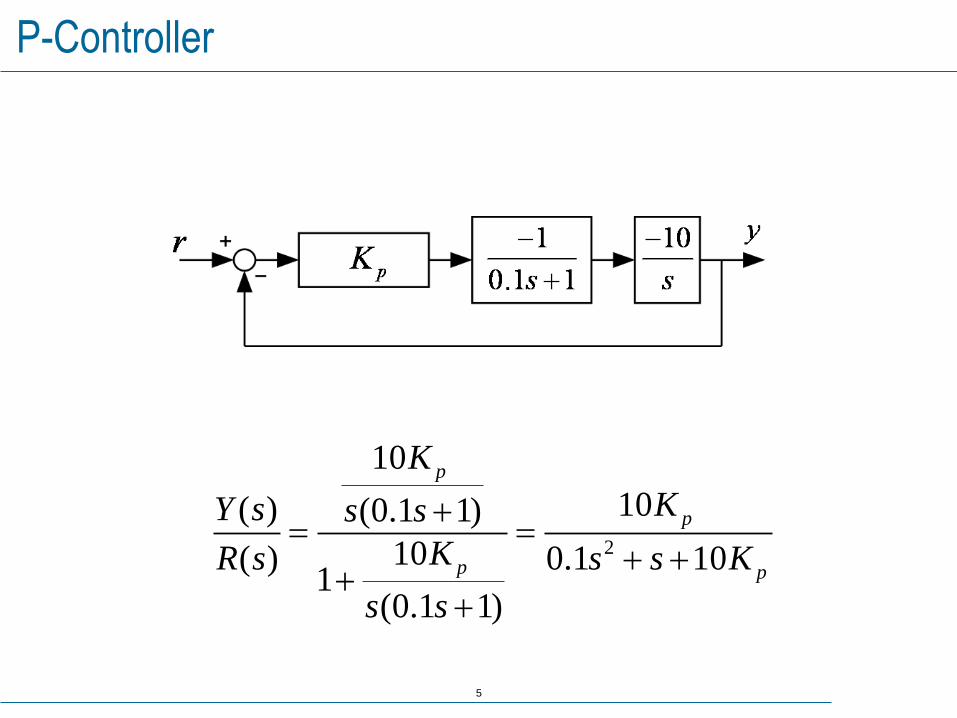
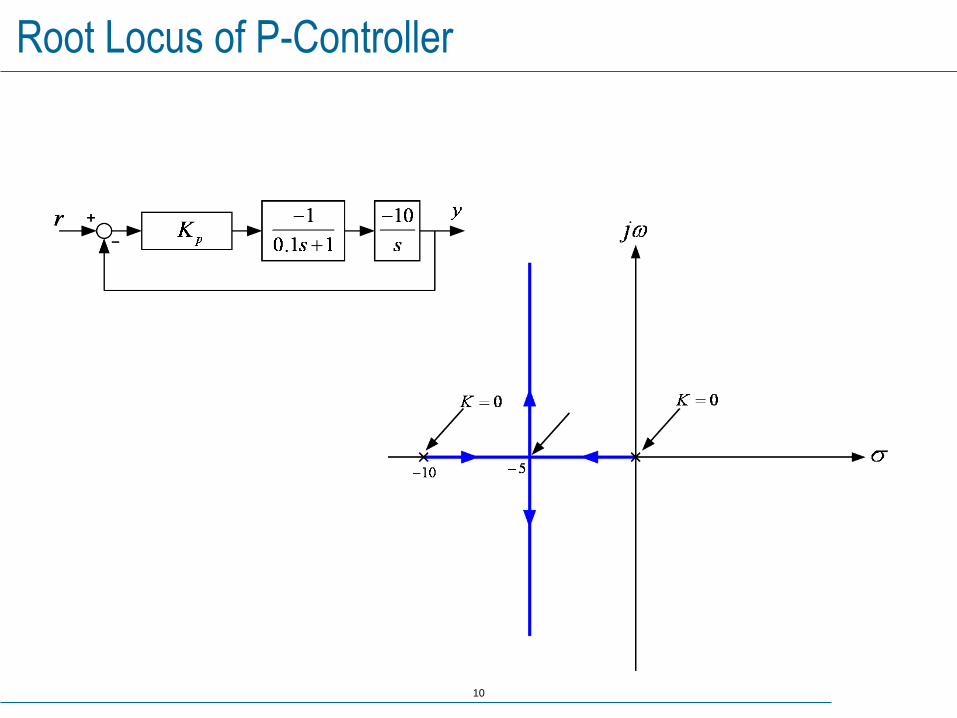
P-Controller
2
10
10( ) (0.1 1)
10( ) 0.1 101
(0.1 1)
p
p
p p
K
KY s s s
KR s s s K
s s
6
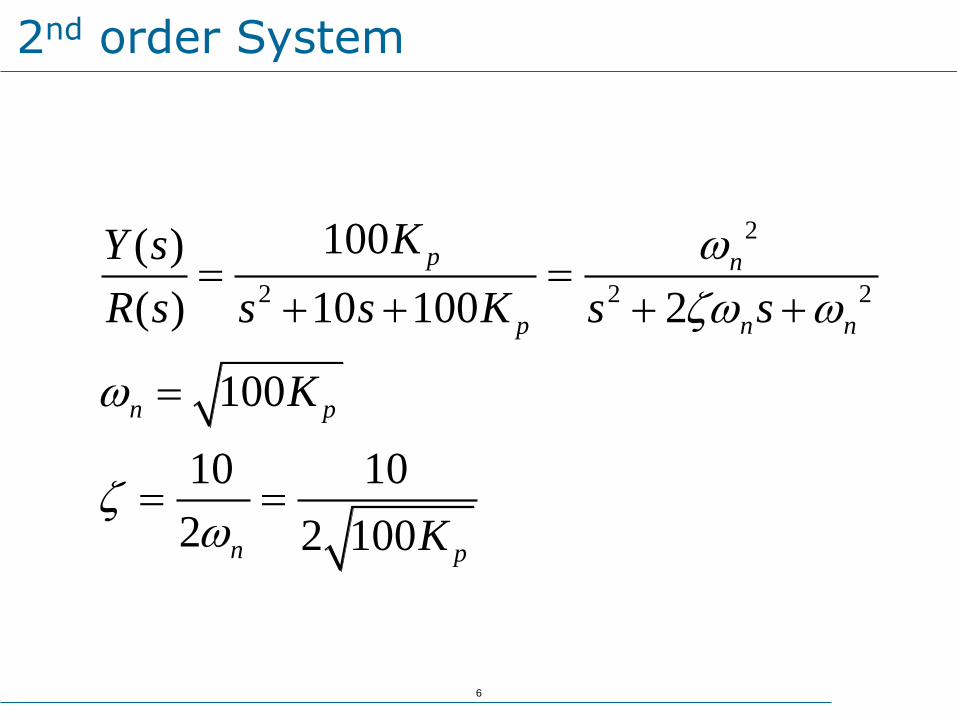
2nd order System
2
2 2 2
100( )
( ) 10 100 2
100
10 10
2 2 100
p n
p n n
n p
n p
KY s
R s s s K s s
K
K
7
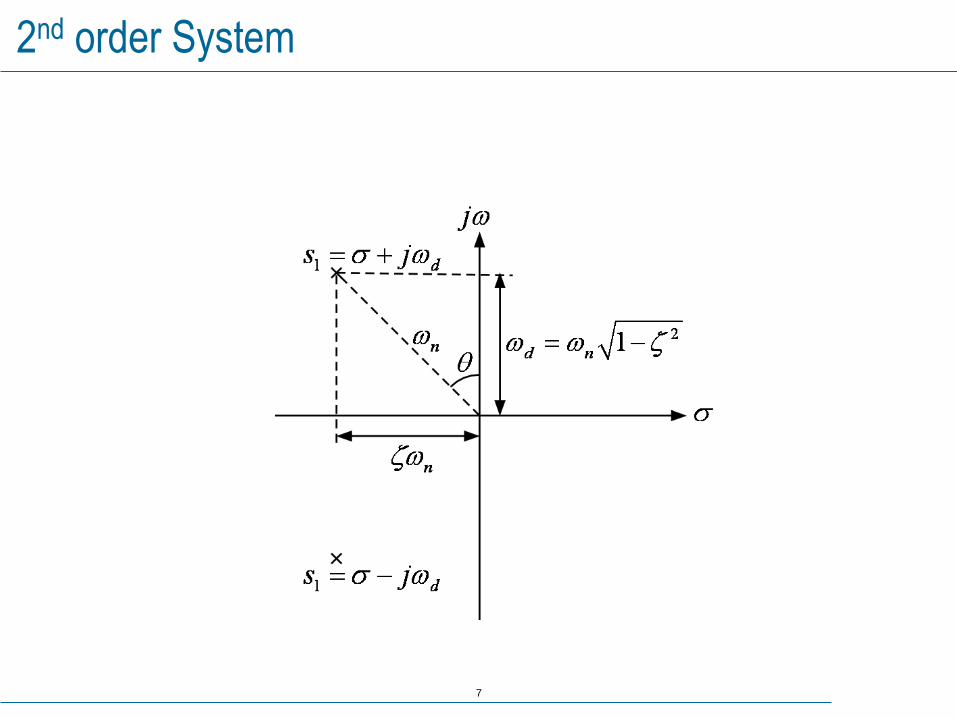
2nd order System

8
2nd order System
9
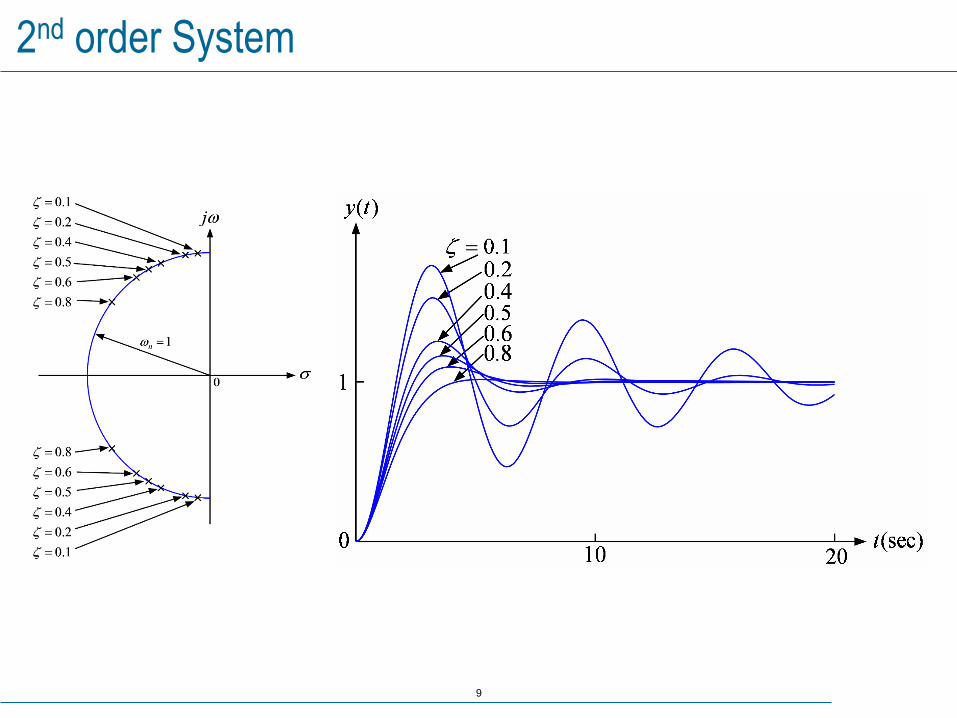
2nd order System
10
Root Locus of P-Controller
11
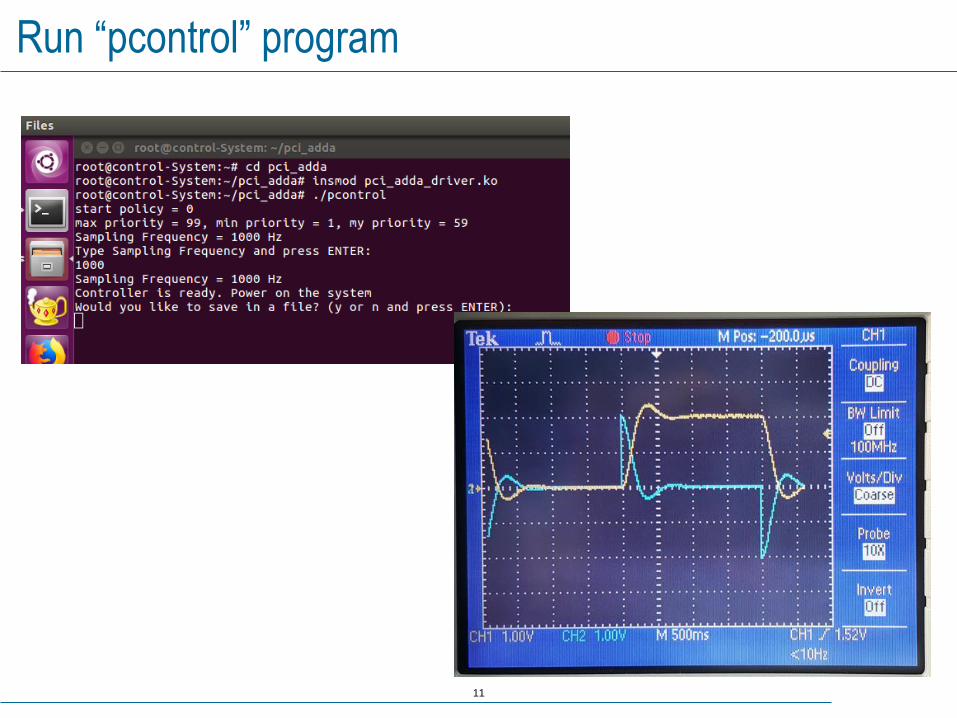
Run “pcontrol” program
12
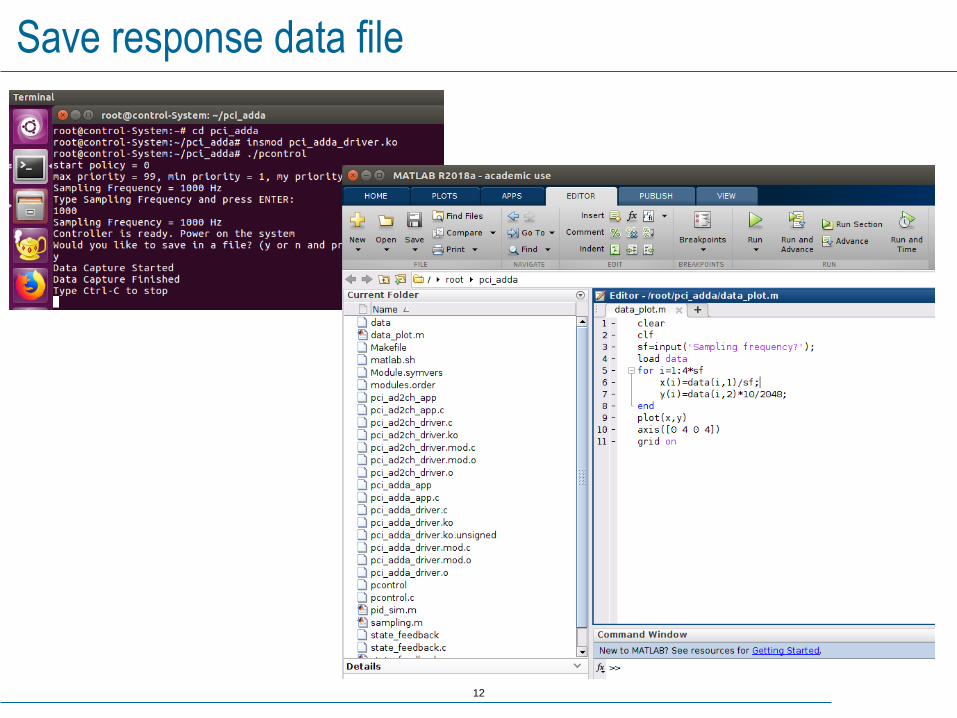
Save response data file
13
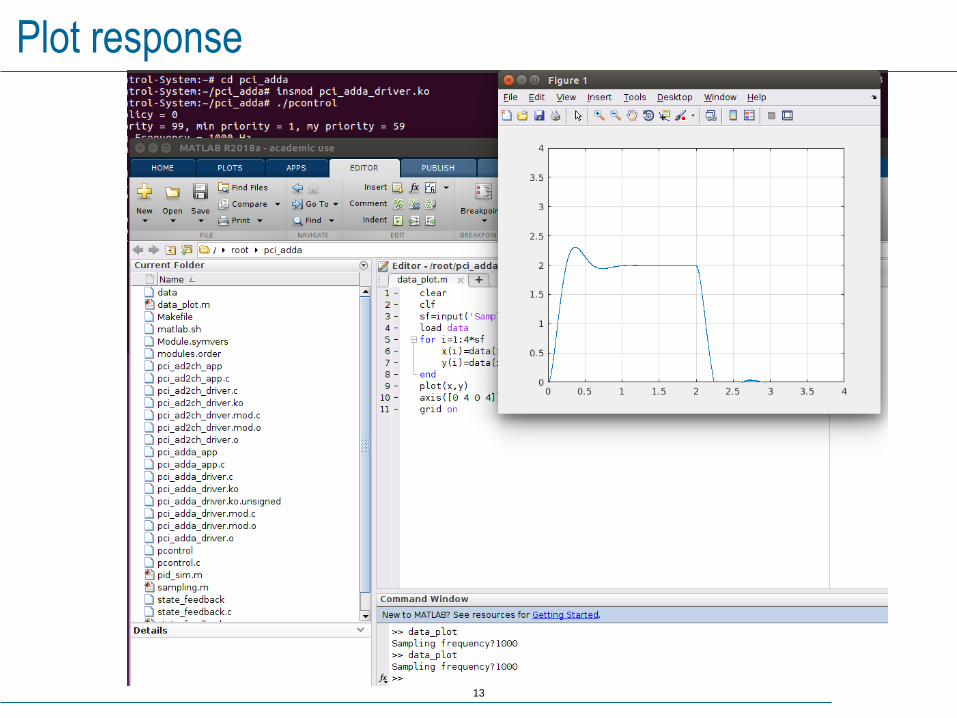
Plot response
14
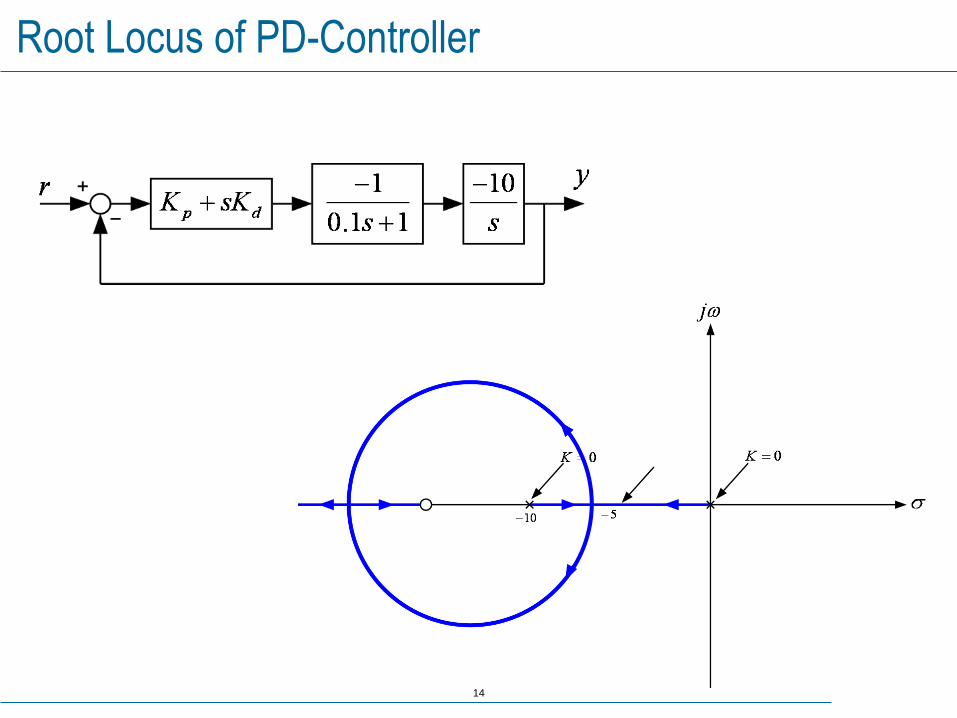
Root Locus of PD-Controller
15
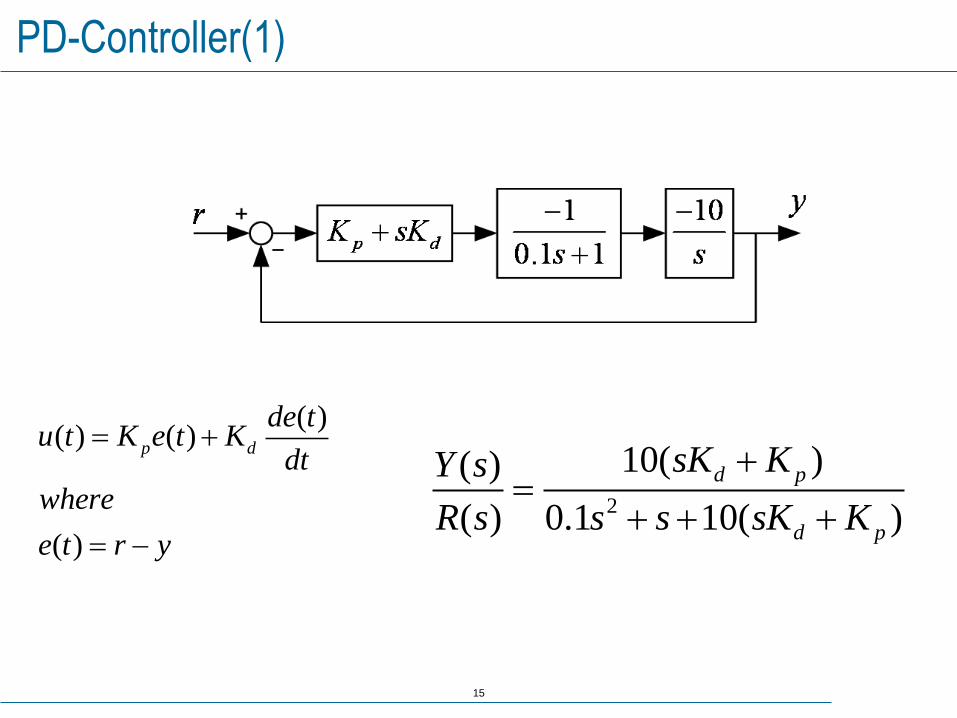
PD-Controller(1)
( )( ) ( )
( )
p d
de tu t K e t K
dt
where
e t r y
2
10( )( )
( ) 0.1 10( )
d p
d p
sK KY s
R s s s sK K
16
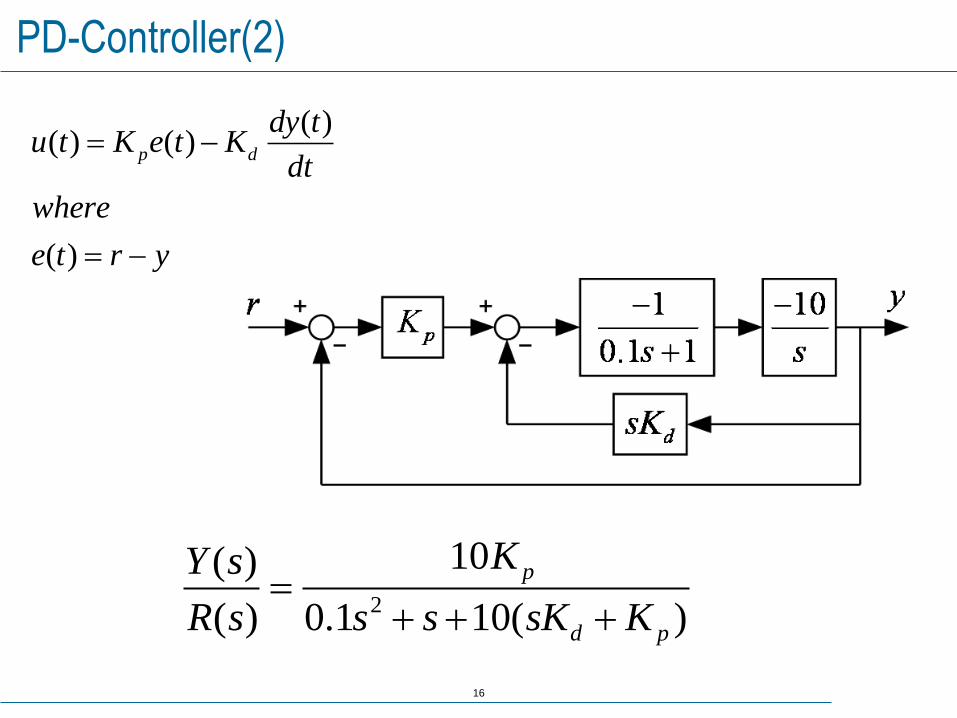
PD-Controller(2)
( )( ) ( )
( )
p d
dy tu t K e t K
dt
where
e t r y
2
10( )
( ) 0.1 10( )
p
d p
KY s
R s s s sK K
17
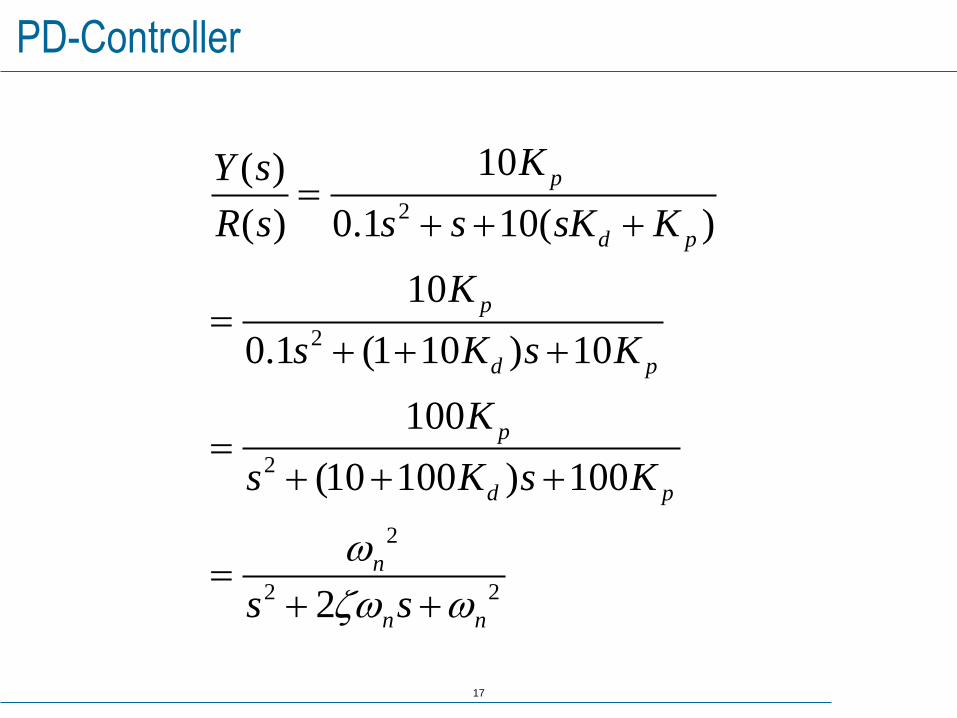
PD-Controller
2
2
2
2
2 2
10( )
( ) 0.1 10( )
10
0.1 (1 10 ) 10
100
(10 100 ) 100
2
p
d p
p
d p
p
d p
n
n n
KY s
R s s s sK K
K
s K s K
K
s K s K
s s
18
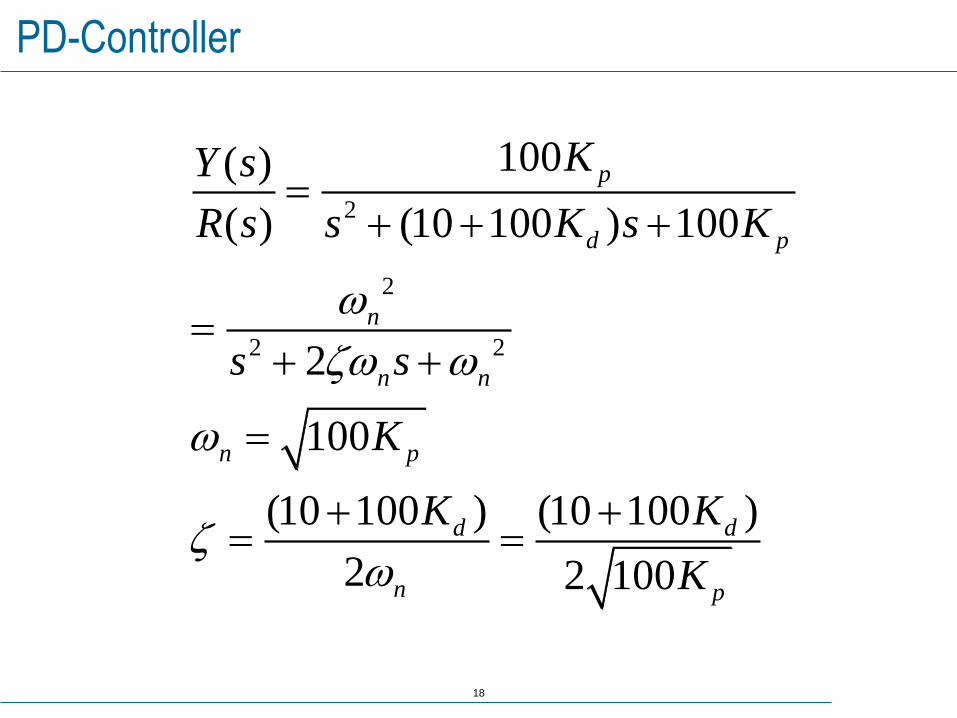
PD-Controller
2
2
2 2
100( )
( ) (10 100 ) 100
2
100
(10 100 ) (10 100 )
2 2 100
p
d p
n
n n
n p
d d
n p
KY s
R s s K s K
s s
K
K K
K
19
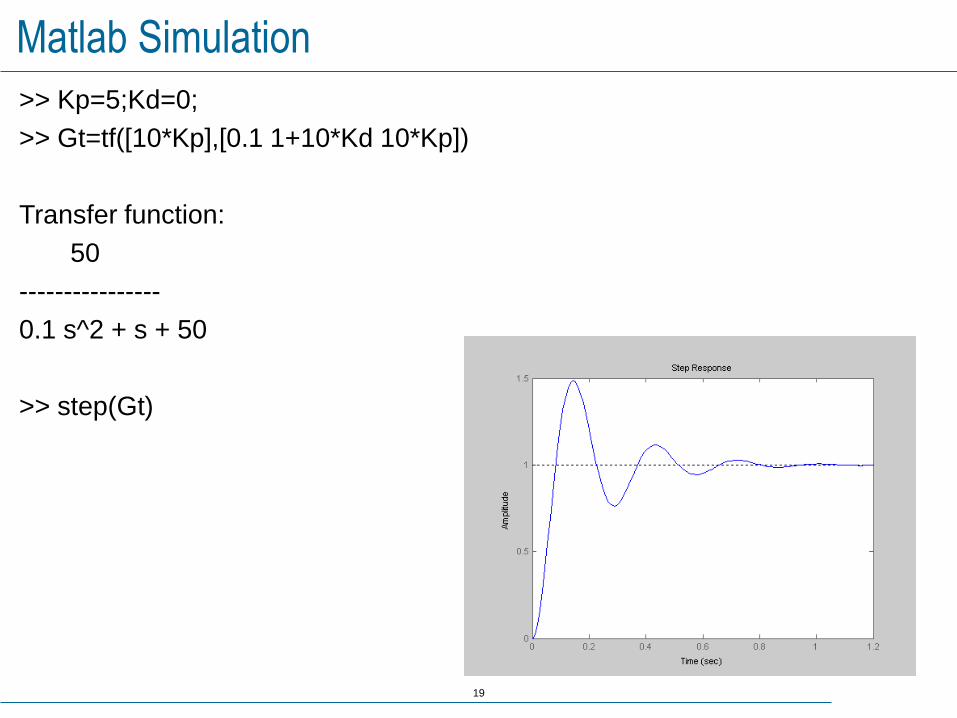
Matlab Simulation
>> Kp=5;Kd=0;
>> Gt=tf([10*Kp],[0.1 1+10*Kd 10*Kp])
Transfer function:
50
----------------
0.1 s^2 + s + 50
>> step(Gt)
20
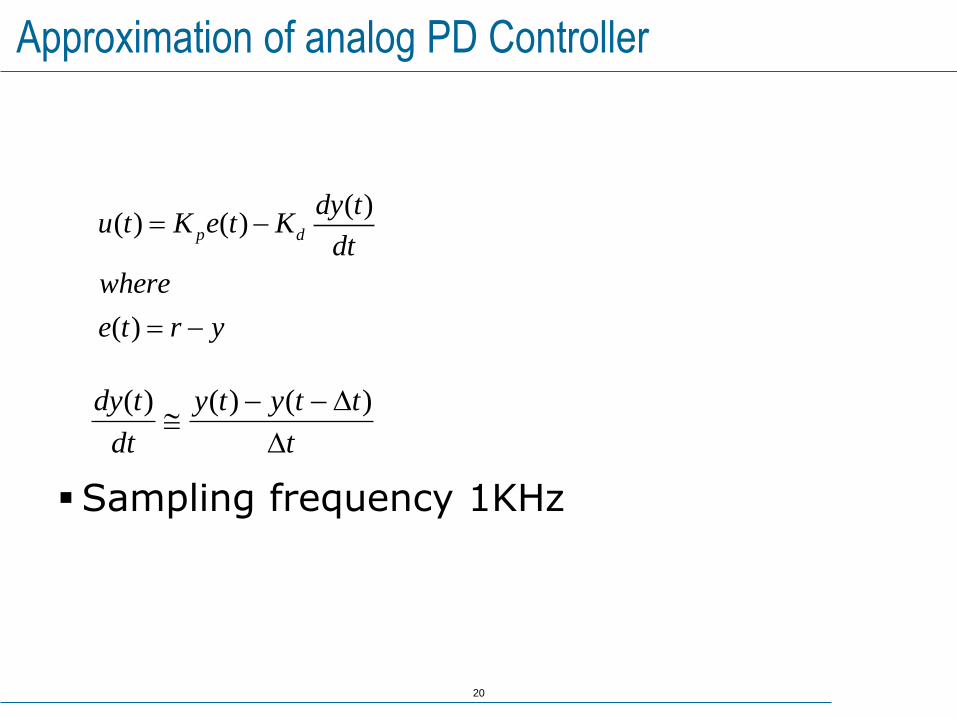
Approximation of analog PD Controller
Sampling frequency 1KHz
t
ttyty
dt
tdy
)()()(
( )( ) ( )
( )
p d
dy tu t K e t K
dt
where
e t r y
21
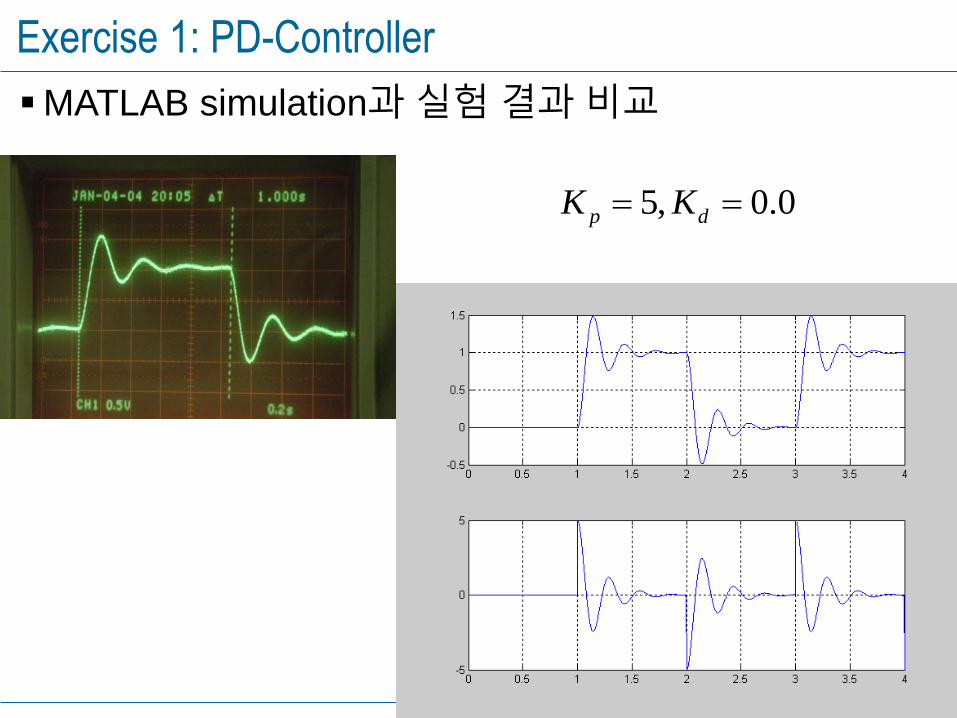
Exercise 1: PD-Controller
MATLAB simulation과실험결과비교
5, 0.0p dK K
22
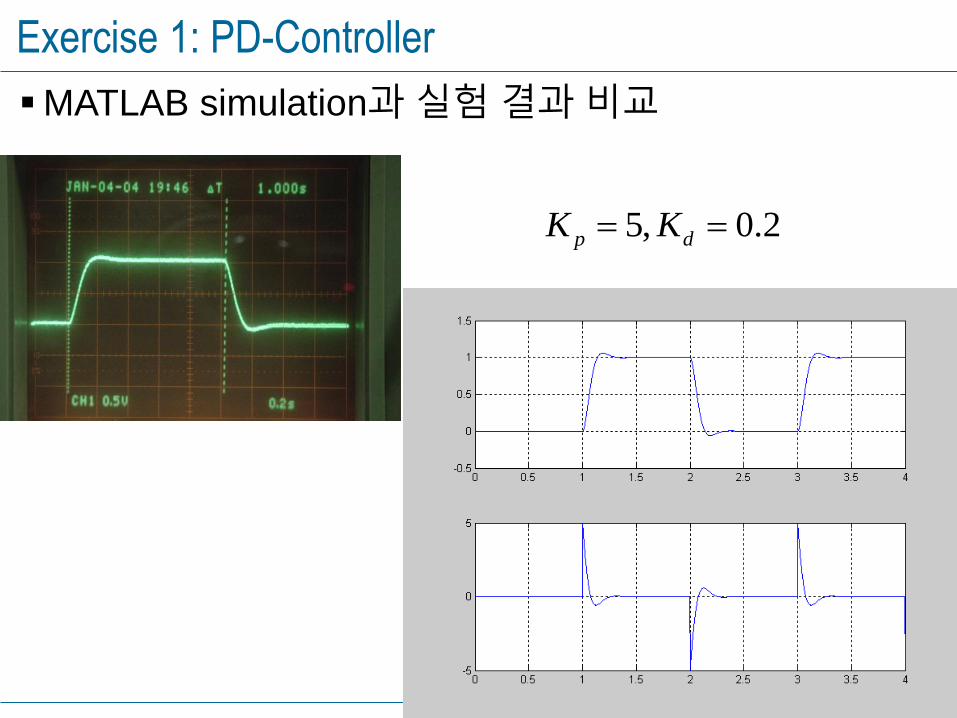
Exercise 1: PD-Controller
MATLAB simulation과실험결과비교
5, 0.2p dK K
23
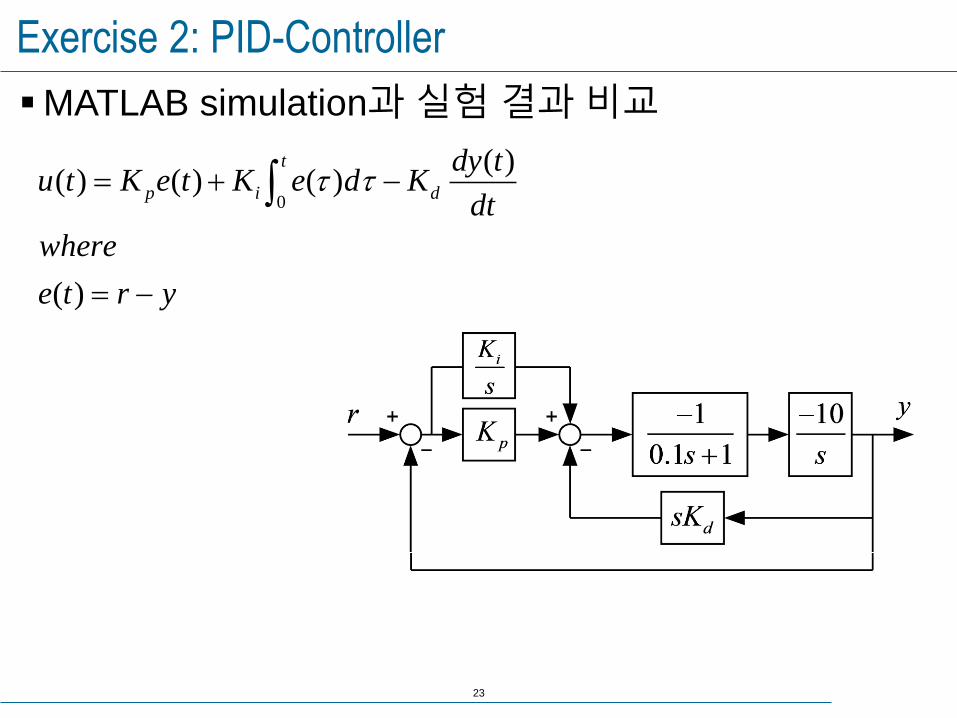
Exercise 2: PID-Controller
MATLAB simulation과실험결과비교
0
( )( ) ( ) ( )
( )
t
p i d
dy tu t K e t K e d K
dt
where
e t r y
24
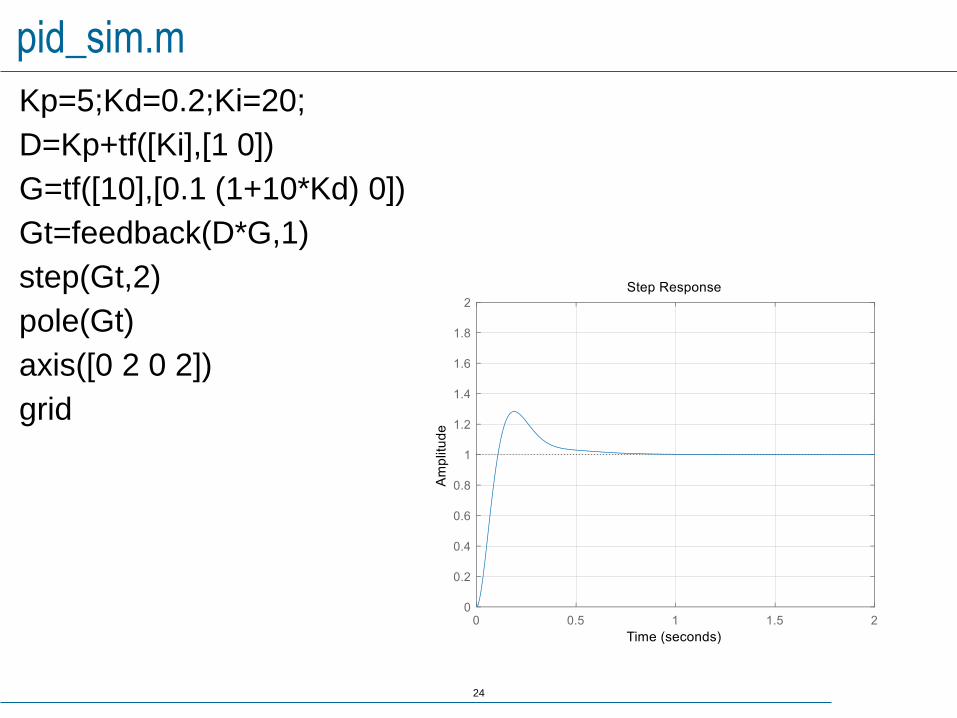
pid_sim.m
Kp=5;Kd=0.2;Ki=20;
D=Kp+tf([Ki],[1 0])
G=tf([10],[0.1 (1+10*Kd) 0])
Gt=feedback(D*G,1)
step(Gt,2)
pole(Gt)
axis([0 2 0 2])
grid
25
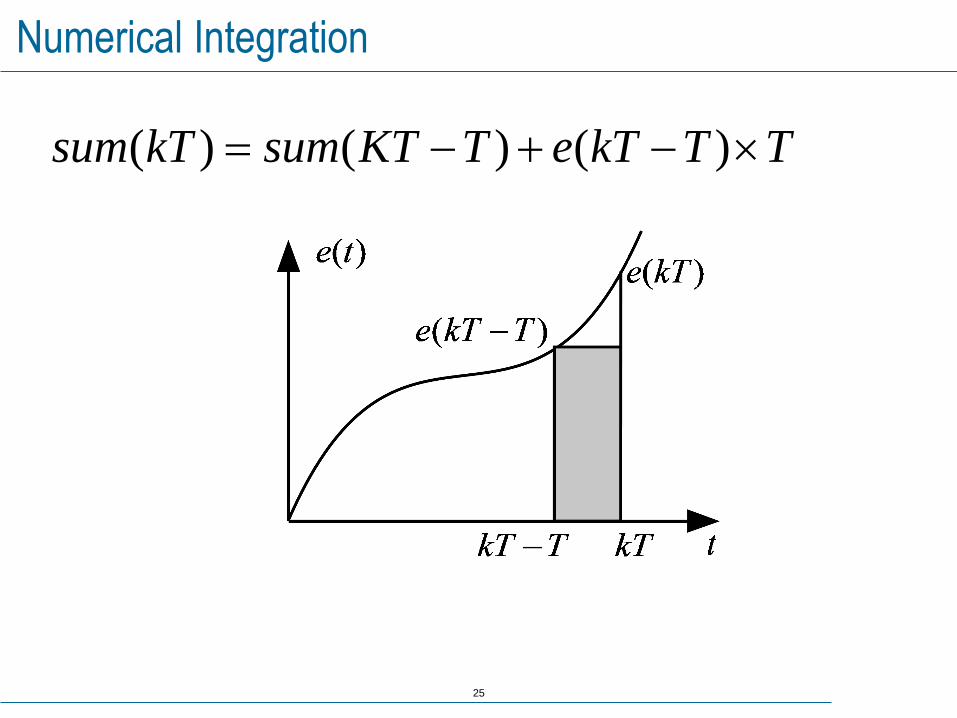
Numerical Integration
( ) ( ) ( )sum kT sum KT T e kT T T








![Chapter5 1.ppt [호환 모드] - Hanyangccrs.hanyang.ac.kr/webpage_limdj/robust/Chapter5_1.pdf · SISO Nyquist Stability Citerion • A SISO is internally stable if all the zeros](https://img.pdfslide.us/doc/110x75/5e80a6c30c204c535a3bed8b/chapter5-1ppt-eeoe-siso-nyquist-stability-citerion-a-a-siso-is-internally.jpg)




















