Embed Size (px)
Citation preview

INTRODUCTION
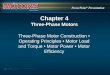
The L6234 is a DMOSs triple half-bridge driver with input supply voltage up 52V and output current of5A. It can be used in a very wide range of applications. It has been realized in Multipower BCD60II technology which allows the combination of isolated DMOStransistors with CMOS and Bipolar circuits on the same chip. It is available in Power DIP 20 (16+2+2)and in Power SO 20 packages.All the inputs are TTL/CMOS compatible and each half bridge can be driven by its own dedicated inputand enable. The DMOS structure has an intrinsic free wheeling body diode so the use of external diodes, which arenecessary in the bipolar configuration, can be avoided. The DMOS structure allows a very low quiescentcurrent of 6.5 mA typ. at Vs=42V , irrespective of the load.
DEVICE DESCRIPTIONThe device is composed of three channels. Each channel is composed of a half bridge with two powerDMOS switches ( typ. Rdson of 300mW @ 25°C) and intrinsic free wheeling diodes. Each channel in-cludes two TTL/CMOS and uP compatible comparators, and a logic block to interface the inputs with thedrivers. The device includes an internal bandgap reference of 1.22V, a 10V voltage reference to supplythe internal circuitry of the device, a central charge pump to drive the upper DMOS switch, thermal shut-down protection and an internal hysteretic function which turns off the device when the junction tempera-ture exceeds approximately 160 °C. Hysteresys is about 20 °C.
April 2001
®
AN1088APPLICATION NOTE
L6234 THREE PHASE MOTOR DRIVERby Domenico Arrigo
CHARGEPUMP
VREF10V
C310nF
C51µF
VREFVCP
C4 220nF
Vs C2100nF
C1100µF
THERMALPROTECTION
T1
T2
T3
T4
T5
T6
VBOOT
D21N4148
OUT1
OUT2
SENSE1
OUT3
SENSE2
IN1
EN1
IN2
EN2
IN3
EN3
D98IN940A
RSENSEGND
D11N4148
Vs
BRUSHLESSMOTOR
WINDINGS
Vs
Figure 1. L6234 Block Diagram
1/14

PIN DESCRIPTION.
Vs ( INPUT SUPPLY VOLTAGE PINS).
These are the two input supply voltage pins. The unregulatedinput DC voltage can range from 7V to 52V.With inductive loads the recommended operating maximumsupply voltage is 42V to prevent overvoltage applied to theDMosfets. In fact considering a full bridge configuration (seefig. 2), when the bridge is switched off (ENABLE CHOPPING)the current recirculation produces a negative voltage to thesource of the lower DMOS switches (point A). In this condi-tion the drain-source voltage of T1 and T4 is VS + VF + Vsense .Dinamically VF can be same Volts depending on the currentslope, dI/dt, and also Vsense, depending on the parasitic in-ductance and current slope can be some Volts. So the drain-source voltage of T1 and T4 DMOS switches can reach morethan 10V over the VS voltage. The input capacitors C1 and C2 are chosen in order to reduce overvoltagedue to current decay and to parasitic inductance. For this reason C2 has to be placed as closed as pos-sible to VS and GND pins.The device can sustain a 4A DC input current for each of the two Vs pins, in accordance with thepower dissipation.
OUT1, OUT2, OUT3 (OUTPUTS). These are the output pinsthat correspond to the mid point of each half bridge. They aredesigned to sustain a DC current of 4A.
SENSE1, SENSE2.SENSE1 is the common source of the lower DMOS of the halfbridge 1 and 2. SENSE2 is the source of the lower DMOS of the half bridge3. Each of these pins can handle a current of 5A. A resistance, Rsense, connected to these pins provides feed-back for motor current control.Care must be taken with the negative voltage applied to thesepins : negative DC voltage lower than -1V could damage thedevice. For duration lower than 300ns the device can sustainpulsed negative voltage up to -4V. For example, if enable chopping current control method isused, negative voltage pulses appear to these pins, due to thecurrent recirculation through the sensing resistor.
Vref ( Voltage Reference).This is the internal 10V voltage reference pin to bias the logicand the low voltage circuitry of the device. A 1µF electrolytic ca-pacitor connected from this pin to GND ensures the stability of theDMOS drive circuit. This pin can be externally loaded up to 5mA .Figure 3 and 4 show the typical behavior of the Vref pin.
Vcp ( CHARGE PUMP ).This is the internal oscillator output pin for the charge pump.The oscillator supplied by the 10V Voltage Referenceswitches from GND to 10V with a typical frequency of
-50 -25 0 25 50 75 100 125 1500
1
2
3
4
5
6
7
8
9
10
11
Tj [°C]
Vref [V]
Vs = 52V
Vs = 24V
Vs = 7V
Vs = 10V
Figure 3. Reference Voltage vs.Junction Temperature.
0 10 20 30 40 500
2
4
6
8
10
12
Vs [V]
Vref [V]
Tj = 25°C
Figure 4. Reference Voltage vs.Supply Voltage.
L
ON/OFF
ON/OFFT1
C
T3
T2 T4
B
A
(VS+VF)
-VSENSE
-VF
VS
VF
ON
OFF
Rsense
D98IN938A
S
Figure 2.
AN1088 APPLICATION NOTE
2/14

1.2MHz (see fig 4). When the oscillator output is at ground , C3 is charged by Vs through D1. When itrises to 10V, D1 is reverse biased and the charge flows from C3 to C4 through D2, so the Vboot pin af-ter a few cycles reaches the maximum voltage of Vs + 10V - VD1- VD2.
Vboot ( BOOTSTRAP).This is the input bootstrap pin which gives the overvoltage necessary to drive all the upper DMOS of thethree half bridges (see fig 5).
LOGIC INPUTS PINS.
EN1, EN2, EN3 (ENABLES). These pins are TTL/CMOS and µP compatible. Each half bridge can be enabled by its own dedicatedpin with a logic HIGH. The logic LOW on these pins switches off the related half bridge (see Fig. 6). Themaximum switching frequency is 50kHz.
IN1, IN2, IN3 (INPUTS).These pins are TTL/CMOS and µP compatible. They allow switching on the upper DMOS ( INPUT athigh logic level) or the lower Dmos (INPUT at low logic level) in each half bridge (see Fig. 6).
10nFVCP
1N4148
0.22µF
VBOOT
1N4148
CHARGE
PUMPVref10V
0.1µF
Vs
100µF
HIGH SIDE DRIVER
Vs+Vref-VD1-VD2
Vref
f=1.2 MHz
Vs+Vref-VD1
Vs-VD1f=1.2 MHz
D1
D2
C3
C4
C2 C1
OUT
Vs
SENSE
Figure 5. Charge Pump Circuit.
UPPER DMOS
LOWER DMOS
DMOS ON
DMOS OFF
DMOS ON
time
time
DMOS OFF
ENABLEhigh level
low level
time
DMOS OFF
INPUT
time
high level
low level low level
high level
high level
DMOS OFF
low level
DMOS OFF
DMOS OFF
Figure 6. Control logic for each half bridge.
tdelay
300ns
tdelay300ns
INPUT PIN
UPPER DMOS
LOWER DMOS
high level
low level
DMOS ON
DMOS OFF
DMOS ON
DMOS OFF
time
time
time
DMOS OFF
DMOS ON
low level
Figure 7. Cross Conduction Protection.
AN1088 APPLICATION NOTE
3/14

Cross conduction protection (see Fig. 7) avoids simultaneously turning on both the upper and lowerDMOS of each half bridge. There is a fixed delay time of 300ns between the turn on and the turn off ofthe two DMOS switches in each half bridge. The switching operating frequency is up 50kHz. High com-mutation frequency permits the reduction of ripple of the output current but increases the device’s powerdissipation, however low commutation frequency causes high ripple of the output current. The switchingfrequency should be higher than 16kHz to avoid acoustic noises.The sink current at the INPUTS and ENABLES pins is approximately 30µA if the voltage to these pins isat least 1V less than the Vref voltage (see Fig. 3 and Fig. 4). To avoid overload of the logic INPUTS andENABLES , voltage should be applied to Vs prior to the logic signal inputs.
POWER DISSIPATIONAn evaluation of the power dissipation of the IC driving a three phase motor in a chopping current con-trol application follows.With a simplified approach it can be distinguished three periods (see Fig. 8) :
Rise Time, Tr, period.This is the rise time period, Tr, in which the cur-rent switches from one winding to another. In thistime a DMOS is switched on and the current in-creases up to the peak value Ipk with the law i(t)= (Ipk/Tr) t. The energy lost for the rise time inthe period T is :
Erise = ∫ 0
TrRdson ⋅ i2(t)dt = Rdson ⋅ I2pk ⋅ Tr
3 Fall Time,Tf, period.When the current switches from one winding toanother, there is a fall time in which the currentthat flows in the intrisic diode of the DMOS de-creases from Ipk to zero. If VD is the voltage fallof the diode, the energy lost is :
Efall = ∫ 0
tfVD(t) ⋅ i(t)dt
TloadDuring this time the current that flows in the winding is limited by the chopping current control. The en-ergy dissipated due to the ON resistance of the DMOS is :
Eload = Rdson ⋅ (Irms)2 ⋅ TloadIn the formula, Irms is the RMS load current, given by :
Irms = √(Iload)2 +
Ipk − Ival√3
2
and Iload is the average load current.When the switch is ON, the energy dissipated due to the commutation of the chopping current control inthe DMOS can be assumed to be:
Eon = Vs ⋅ Ival ⋅ tcom2
where tcom is the commutation time of the DMOS switch.
Trise TfallTload
Tchop
Ipk
Ival
Iload
Figure 8.
AN1088 APPLICATION NOTE
4/14

When the switch is OFF : Eoff = Vs ⋅ Ipk ⋅ tcom
2
The energy lost by commutation in a chopping period, given by Eon + Eoff, is :
Ecom = Vs ⋅ Iload ⋅ tcom
The energy lost by commutation during the Tload time is given by :Ecom = Vs ⋅ Iload ⋅ tcom ⋅ Tload ⋅ fchop
Quiescent Power Dissipation, Pq.The power dissipation due to the quiescent current is Pq = Vs ⋅ Iq , in which Iq is the quiescent currentat the chopping frequency, fchop = 1/Tchop.
Total Power Dissipation .Let’s evaluate the power dissipation of the device driving a three phase brushless motor in chopping cur-rent control. In the driving sequence only one upper DMOS and a lower one are on at the same time(see fig. 9 and 10). The total power dissipation is given by :
Ptot = 2 ⋅ (Erise + Efall + Eload + Ecom)
T + Pq
Figure 11 shows the total power dissipation, Pd, of the L6234 driving a three phase brushless motor ininput chopping current control at different chopping frequency.
EVALUATION BOARD. The L6234 Power SO20 board has been realized to evaluate the device driving, in closed loop control, athree phase brushless motor with open collector Hall effect sensors.
ILOAD
I1B
I1A
I2B
half bridge 1 half bridge 2
OUT1 OUT2
I1B I2B
I1A
ILOAD
Vs
ON/OFF
OFF/ON ON
OFF
_PHASE 12 CHOPPING INPUT
IOFF
Figure 9. Input chopping current circulation.
AN1088 APPLICATION NOTE
5/14

The device soldered on the copper heat dissipatingarea on the board ,without any additional heat sink,can sustain a DC load current of 2.3 A at Tamb ofapproximately 40 °C. The board provides a closed loop speed and torquecontrol, with a constant TOFF chopping current con-trol method. It allows the user to change the direc-tion and brake the motor.
Constant t OFF Chopping Current Control.When the current through the motor exceeds thethreshold, fixed by the ratio between the controlvoltage Vcontrol and the sensing resistor, Rsense,an error signal is generated, the output of theLM393 comparator switches to ground. This state ismaintained by the monostable (M74HC123) for aconstant delay time ( tOFF ) generating a PWM sig-nal that achieves the chopping current control. ThePWM signal is used for chopping the INPUT pat-tern. During the toff in chopping current control, thecurrent flows in the low side loop ( see fig. 9 ) and does not flow through the sensing resistor. The tOFF value can be set by the R9 and C11 to values shown in the table 1.A suitable value of toff for the majority of applications is 30µs. The larger the tOFF, the higher is the cur-rent ripple. If the tOFF is too large the ripple current becomes excessive . On the other hand if the tOFF istoo small the winding current cannot decrease under the threshold and current regulation is not guaran-teed.
IOUT1
IOUT2
IOUT3
T
OUT3
L6234
OUT2
OUT1
BRUSHLESS MOTOR
Figure 10. Three Phase Brushless motor control sequence.
0 1 2 3 4 50
ILOAD [A]
Pd [W]
DC
fchop=30kHz
fchop=50kHz15
10
5
INPUT CHOPPINGVs=36VL=2mHT=2msTj=100C
Figure 11. L6234 Power Dissipation in ThreePhase Brushless Motor Control.
AN1088 APPLICATION NOTE
6/14

Torque & Speed Closed Loop Control.The motor’s rotational speed is determined by the frequency of the Hall effect signals. The speed controlloop has been achieved by comparing this frequency with a frequency of a reference oscillator (see fig.14) that corresponds to a desired speed limit.
3OUT3
L6234
C1 100uF 60V
EN3
IN3
IN2
IN1
EN1
EN2
OUT2
OUT1
VbootVcpVs
79 12 17 18
6
5
15
4
14
8
13
D1 D2C4
C3 10nF
C2 220nF100nF
1N4148 1N4148
POWER SO20
1 2
GND
+5V
Vref
10 11 20 16 19
C51uF
R10 10K each
IN2
IN1
IN3
EN3
EN2
EN1
SENSE
R1 R2 R3 R4
REFERENCESPEED
CONSTANT toff CHOPPING CURRENT CONTROL
Vsense
Vcontrol TORQUE &SPEED
CONTROL
PWM
BRUSHLESS MOTOR
HALL EFFECT
SENSORS
CONTROL LOGIC
HALL EFFECT SIGNALS
BRAKEDIR
PWM
Hall effect signal
C6 220nF
1
2IN
3OUT
L7805
GND10uF C7
Z1 18V
R5 10k
T1+5V
J7
Reference Speed
Vs=8V to 42
1Ω 1Ω 1Ω 1Ω
Figure 12. Application board Schematic Circuit.
M74HC123monostable
+5V
+5V
C11330pF
R9
100nFC10 2 316
415 14 8
1
100k
R11
10k
Vcontrol
PWM
+5V
100nF
LM393
R7 11 k
R81K
C8 470pF
R6 1K2 Vsense
1
+5V
8
34+
-
C9
_Q
A
B
+5V
J1
Figure 13. Constant toff current control.
toff R9 C11
20µs 100k 270pF
30µs 100k 330pF
45µs 100k 560pF
70µs 100k 1nF
Table 1. toff selection
PHASE/FREQUENCYDETECTOR
HALLSENSORS
COMPENSATIONNETWORK
PWMVcontrol
Amp. MOTOR
REFERENCE
FEEDBACK
D01IN1209
Figure 14. PLL Motor Control.
AN1088 APPLICATION NOTE
7/14

When the hall effect signal fre-quency is lower than the referencefrequency, the control voltage ismaintained to a value that sets themotor current limit and therefore thetorque control limit. The peak cur-rent limit is given by Ipeak = Vcon-trol/Rsense.When the frequency from the HallEffect sensors exceeds the refer-ence frequency and an error signalis generated by the PLL (see Fig.14). An LM358 comparator, a loopamplifier and an auxiliary OP-AMPensure the right gain and filtering toguarantee the stability (see fig.16).The error signal causes Vcontroldecrease to a value that sets thePWM chopping current control in or-der to reduce the torque and setthe desired speed. The motorspeed is regulated to within ± 0.02% of the desired speed.
Control Logic Circuit.The logic sequence to the motor isgenerated by a GAL16V8, whichdecodes the Hall Effect signals andgenerates the INPUT and ENABLEpattern shown in Fig. 18.The brake function is obtained bysetting the input pattern to logic lowand thus turning on the lowerDMOS switches of the enabled half-bridges. The PWM signal is used for chop-ping the INPUT pattern.
The control logic circuit decodesHall effect sensors having differentphasing.With the DIR jumper opened theapplication achieves forward rota-tion for motors having 60° and 120°Hall Effect sensor electrical phasingand the reverse rotation for motorshaving 300° and 240° Hall Effectsensor phasing.Connecting the DIR jumper toground sets the reverse rotation formotors having 60° and 120° Hallsensors phasing and the forwardrotation for motors having 300° and240° Hall sensor phasing.The SW2 switch performs the start-stop function.
Reference Speed
NE555
100nFC21
4 7
1
+5V
100nF
2
R27
16K
C20
R2636K
5
3 8
6
100nFC19
Figure 15. Oscillator for Reference Speed.
R16
270K
3 1
GND
+5V
7
9
12
6
5
15
13
14
8 1011
2
4
16
C15100nF
BAT47
HALL1 (Speed feedback)
+5V+VIN
100nFC14C13
1uF
3635
+5V
Vcontrol
+5V
5K
R1447K
R1347K
R20R1547K
R18
33K
C16220nF
C1747nF
R1991K R21
91K
R17
10MLM358
+5V
R1247K
21
C12100nF 8
3
4
+-
P21K
P1
GND
Reference Speed
TP8
Phase/ FrequencyDetector
2.5VLoopAmplifier
Aux.OP-AMP
Output
Figure 16. Phase Locked Loop and filtering.
100nF
C18
2
3GAL 16V8
4
191
610
5
20
PWM+5V
PWM
BRAKE
DIR
HALL1
HALL2
HALL3
EN1
EN2
EN3
IN1
IN2
IN3
16
15
14
18
17
BRAKE DIR
GND
+5V
MOTOR HALL EFFECT SIGNALS
DIRECTION CHANGE
DIR =0 GND : BACK ROTATION DIR = 5V : FORWARD ROTATION
BRAKE FUNCTION
BRAKE = GND : BRAKE BRAKE = 5V : GO
IN2
IN1
IN3
EN3
EN2
EN17
+5V
R2510k
R2610k
R2210k
R2310k
R2410k
R2910k
SW1J1
SW2
Figure 17. Control Logic Circuit.
AN1088 APPLICATION NOTE
8/14

0˚
HALL1
D98IN912
HALL2
HALL3
SENSORSIGNALS
EN1
EN2
EN3
ENABLE
IN1
IN2
IN3
FORWARDROTATION
IN1
IN2
IN3
REVERSEROTATION
IOUT1
IOUT2
IOUT3
MOTORDRIVE
CURRENTIN
FORWARDROTATION
NO PWM PWM CONSTANT tOFF
ELECTRICAL DEGREES
0
0
0
360˚
Figure 17.
AN1088 APPLICATION NOTE
9/14

Layout Considerations.Special attention must be taken to avoid overvoltages at Vs and additional negative voltages to theSENSE pins and noise due to distributed inductance. Thus the input capacitor must be connected closeto the Vs pins with symmetrical paths. The paths between the SENSE pins and the input capacitorground have to be minimized and symmetrical . The sensing resistors must be non-inductive. The de-vice GND has to be connected with a separate path to the input capacitor ground.
Figure 20. Component side.
Figure 19. Application Board Layout.
AN1088 APPLICATION NOTE
10/14

APPLICATION IDEAS.The L6234 can be used in many different applications. Typical examples are a half bridge driver usingone channel and a full bridge driver using two channels. In addition, the bridges can be paralleled to re-duce the RDSon and the device dissipation.The paralleled configuration can also be used to increase output current capability. Channel 1 can beparalleled with Channel 3 or Channel 2 can be paralleled with Channel 3. Channel 1 should not be paral-leled with Channel 2 because the sources of their low side DMOSs are connected to the same SENSE1pin .Application ideas for the L6234 follow.
Figure 21. Copper side.
CONTROL LOGIC
L6506+5V
100nF
QR
S
QRS
OSC+5V
RSENSE
OUT3
L6234 EN3
EN1
EN2
Vs
100uF
1N4148 1N4148
IN3
IN2
IN1
OUT2
OUT1VbootVcpVs
10nF 220nF
100nF
POWER SO20
GND Vref
SENSE2
1uF
Vsense
Constant frequency Current Control
Vcontrol
+5V
IN1
IN2
IN3
Reset
EN3
EN1
EN2
SENSE1
Rx
Cx
1 Fchop= __________ 0.69 Rx Cx
for Rx>10kOhm
Figure 22. Constant frequency current control
AN1088 APPLICATION NOTE
11/14

Low Cost Application with Speed and Torque Control Loops.
A low cost solution to obtain a complete three phase brushless motor control application with speed andtorque closed control loop is shown in Fig. 23. This simple low cost solution is useful when high dynamicperformances and accuracy of the speed loop are not required.
The current regulation limit, which determines the torque , is given by Vcontrol/Rsense. The constanttoff of the PWM is fixed by Rx2 and Cx2. The speed loop is realised using a Hall effect signal, whose frequency is proportional to the motorspeed. At each positive transition of the Hall effect sensors the monostable maintains the pulse for aconstant time , Ton, with a fixed amplitude, V5. The average value of this signal is proportional to the fre-quency of the Hall effect signal and the motor speed . An OP-AMP configured as an integrator , filtersthis signal and compares it with a reference voltage, Vref, which sets the speed . The generated errorsignal is the control voltage, Vcontrol, of the currrent loop. Therefore the current loop modifies the pro-duced torque in order to regulate the speed at the desired value.The values of Cf and R2 should be chosen to obtain a nearly ripple free op-amp output, even at low mo-tor speed. This constrain limits the system bandwidth and so limits the response time of the loop. The regulated speed, for a rotor with n pairs of permanent magnetic poles , is given by :
ωm =
1 +
R1R2
V5 ⋅ Ton ⋅ n + 1
KG
⋅ Vref ⋅ 60 [RPM]
with KG = R4
R3 + R4 ⋅ Kt ⋅ 1
Rsense ⋅ 1
B ⋅ R2
R1
in which Kt, expressed in [Nm/A] , is the Motor Torque constant and B, expressed in [Nms], is the TotalViscous Friction.In most cases 1/KG can be neglected.
HALLEFFECT
SENSORS
HALLEFFECTSIGNALS
VS
+5V
1/4TSM221
Q
V5=+5V
PWM
OUT1
OUT2
OUT3
BRUSHLESS MOTOR
SPEED LOOP
L6234POWER SO20
CONTROLLOGIC
IN1
IN2
IN3
EN1
EN2
EN3
17 18
6
7
4
14
8
3
13
12
1Q13
1B
HALL EFFECT SIGNAL
27
17
1
4
11
6 VSENSE
2
3
51110
1,10,11,20
-
+
-
+
16 2 19
5
15
GND SENSE
RSENSE0.3W
C1 200nF
R2 1MR1 100K Ton
1/fe
Vm
V5
R3 4KVCONTROL
1/4TSM221
R41K
V5=+5V
Vref
+5VRx2
Cx2
9 12
6 163
15 1 14 8
+5VRx1
100K Cx1
A
(ReferenceSpeed Voltage)
1/2M74HC123
MONOSTABLE
1/2M74HC123
MONOSTABLE
D01IN1210
Figure 23. Complete three phase brushless motor application with speed and torque control.
AN1088 APPLICATION NOTE
12/14

The Ton values, given by KCx1Rx1, must be less than the period of the Hall effect electrical signal atthe desired motor speed , so Ton must meet the requirement of 1.1 :
( 1.1 ) Ton < 60
n ⋅ ωm For the motor and the load used in this application, which have the following parameters :
Jt = 10-4 [Kg ⋅ m2] (Motor plus Load Inertia Moment); Kt = 10-2 [Nm/A] ; B = 10-5 [Nms] n=4 ; R1=100k +/- 10% [kΩ] ; R2=1M ±1[kW] ; Cf=220n [F]
A regulated speed of 6000RPM can be obtained with an accuracy of around +/-3%, considering Ton ac-curacy of +/-1% , the V5 and Vref mismatch of +/-1% .If the speed is 6000RPM, there are 100 rotor revolution for second, with n=4, the Hall effect frequency is 400Hz. Therefore Ton has to be lower than 2.5ms (according to equation 1.1).The phase margin is about 45° and the response time of the speed loop for a speed step variation isaround 200ms .
6X6 BRUSHLESS APPLICATION
Vcontrol
Constant Toff PWM Current Control. Two M74HC124 plus an LM339
THREE PHASEBRUSHLESS MOTOR
IN1B
IN1A
IN2A
EN2
EN1OUT3
L6234
EN3
EN1EN2
IN3IN2IN1
OUT2
OUT1VbootVcpVs
Vs
100uF 1N4148 1N4148
10nF 220nF100nF
GND VrefSENSE1
1uF
SENSE2
IN3B
IN3A
IN2BEN3
OUT3
L6234
EN3
EN1EN2
IN3
IN2IN1
OUT2
OUT1VbootVcpVs
Vs
100uF
1N4148 1N4148
10nF
220nF100nF
GND VrefSENSE1
1uF
SENSE2
M74HC123monostable
+5V
100nF 2 316
415
14 8
1
+5V
+5V 100nFLM339
470pF
1K
1
+5V
8
+-
_Q
A
B
4
Comparator & monostable
Comparator & monostable
Comparator & monostable
CONTROL LOGIC
Vsense1
Vsense2
Vsense3
PWM1
PWM2
PWM3
OUT1A
OUT1B
OUT2A
OUT2B
OUT3B
OUT3A
SPEED AND POSITION FEEDBACK
Figure 24. 6x6 Three Phase Brushlees Application Circuit
AN1088 APPLICATION NOTE
13/14

Information furnished is believed to be accurate and reliable. However, STMicroelectronics assumes no responsibility for the consequencesof use of such information nor for any infringement of patents or other rights of third parties which may result from its use. No license isgranted by implication or otherwise under any patent or patent rights of STMicroelectronics. Specification mentioned in this publication aresubject to change without notice. This publication supersedes and replaces all information previously supplied. STMicroelectronics productsare not authorized for use as critical components in life support devices or systems without express written approval of STMicroelectronics.
The ST logo is a registered trademark of STMicroelectronics© 2001 STMicroelectronics – Printed in Italy – All Rights Reserved
STMicroelectronics GROUP OF COMPANIESAustralia - Brazil - China - Finland - France - Germany - Hong Kong - India - Italy - Japan - Malaysia - Malta - Morocco -
Singapore - Spain - Sweden - Switzerland - United Kingdom - U.S.A.http://www.st.com
AN1088 APPLICATION NOTE
14/14