Embed Size (px)
Citation preview

MAX−PLANCK−INSTITUT
DYNAMIK KOMPLEXER
TECHNISCHER SYSTEME
MAGDEBURG
Conference in honour ofNancy Nichols’ 70th birthday
Reading, 2–3 July 2012
Krylov Subspace Methods for NonlinearModel Reduction
Peter Benner and Tobias Breiten
Max Planck Institute for Dynamics of Complex Technical SystemsComputational Methods in Systems and Control Theory
Magdeburg, Germany
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 1/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Outline
1 Motivation
2 Quadratic-Bilinear Control Systems
3 Nonlinear Model Reduction by Generalized Moment-Matching
4 Numerical Examples
5 Conclusions and Outlook
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 2/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
MotivationNonlinear Model Reduction
Given a large-scale state-nonlinear control system of the form
Σ :
{x(t) = f (x(t)) + bu(t),
y(t) = cT x(t), x(0) = x0,
with f : Rn → Rn nonlinear and b, c ∈ Rn, x ∈ Rn, u, y ∈ R.
Optimization, control and simulation cannot be done efficiently!
MOR
Σ :
{˙x(t) = f (x(t)) + bu(t),
y(t) = cT x(t), x(0) = x0,
with f : Rn → Rn and b, c ∈ Rn, x ∈ Rn, u ∈ R and y ≈ y ∈ R, n� n.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 3/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
MotivationNonlinear Model Reduction
Given a large-scale state-nonlinear control system of the form
Σ :
{x(t) = f (x(t)) + bu(t),
y(t) = cT x(t), x(0) = x0,
with f : Rn → Rn nonlinear and b, c ∈ Rn, x ∈ Rn, u, y ∈ R.Optimization, control and simulation cannot be done efficiently!
MOR
Σ :
{˙x(t) = f (x(t)) + bu(t),
y(t) = cT x(t), x(0) = x0,
with f : Rn → Rn and b, c ∈ Rn, x ∈ Rn, u ∈ R and y ≈ y ∈ R, n� n.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 3/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
MotivationNonlinear Model Reduction
Given a large-scale state-nonlinear control system of the form
Σ :
{x(t) = f (x(t)) + bu(t),
y(t) = cT x(t), x(0) = x0,
with f : Rn → Rn nonlinear and b, c ∈ Rn, x ∈ Rn, u, y ∈ R.Optimization, control and simulation cannot be done efficiently!
MOR
Σ :
{˙x(t) = f (x(t)) + bu(t),
y(t) = cT x(t), x(0) = x0,
with f : Rn → Rn and b, c ∈ Rn, x ∈ Rn, u ∈ R and
y ≈ y ∈ R, n� n.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 3/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
MotivationNonlinear Model Reduction
Given a large-scale state-nonlinear control system of the form
Σ :
{x(t) = f (x(t)) + bu(t),
y(t) = cT x(t), x(0) = x0,
with f : Rn → Rn nonlinear and b, c ∈ Rn, x ∈ Rn, u, y ∈ R.Optimization, control and simulation cannot be done efficiently!
MOR
Σ :
{˙x(t) = f (x(t)) + bu(t),
y(t) = cT x(t), x(0) = x0,
with f : Rn → Rn and b, c ∈ Rn, x ∈ Rn, u ∈ R and y ≈ y ∈ R, n� n.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 3/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
MotivationCommon Reduction Techniques
Proper Orthogonal Decomposition (POD)
Take computed or experimental ’snapshots’ of full model:[x(t1), x(t2), . . . , x(tN)] =: X ,
perform SVD of snapshot matrix: X = VSW T ≈ VnSnWTn .
Reduction by POD-Galerkin projection: ˙x = V Tn f (Vnx) + V T
n Bu.
Requires evaluation of f discrete empirical interpolation [Sorensen/Chaturantabut ’09].
Input dependency due to ’snapshots’ !
Trajectory Piecewise Linear (TPWL)
Linearize f along trajectory,
reduce resulting linear systems,
construct reduced model by weighted sum of linear systems.
Requires simulation of original model and several linear reductionsteps, many heuristics.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 4/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
MotivationCommon Reduction Techniques
Proper Orthogonal Decomposition (POD)
Take computed or experimental ’snapshots’ of full model:[x(t1), x(t2), . . . , x(tN)] =: X ,
perform SVD of snapshot matrix: X = VSW T ≈ VnSnWTn .
Reduction by POD-Galerkin projection: ˙x = V Tn f (Vnx) + V T
n Bu.
Requires evaluation of f discrete empirical interpolation [Sorensen/Chaturantabut ’09].
Input dependency due to ’snapshots’ !
Trajectory Piecewise Linear (TPWL)
Linearize f along trajectory,
reduce resulting linear systems,
construct reduced model by weighted sum of linear systems.
Requires simulation of original model and several linear reductionsteps, many heuristics.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 4/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Quadratic-Bilinear Control SystemsQuadratic-Bilinear Differential Algebraic Equations (QBDAEs)
Let us consider the class of quadratic-bilinear differential algebraicequations
Σ :
{Ex(t) = Ax(t) + Hx(t)⊗ x(t) + Nx(t)u(t) + bu(t),
y(t) = cT x(t), x(0) = x0,
where E ,A,N ∈ Rn×n,H ∈ Rn×n2
(Hessian tensor), b, c∈ Rn.
A large class of smooth nonlinear control-affine systems can betransformed into the above type of control system.
The transformation is exact, but a slight increase of the statedimension has to be accepted.
Input-output behavior can be characterized by generalized transferfunctions enables us to use Krylov-based reduction techniques.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 5/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Quadratic-Bilinear Control SystemsTransformation via McCormick Relaxation [McCormick ’76]
Theorem [Gu’09]
Assume that the state equation of a nonlinear system Σ is given by
x = a0x + a1g1(x) + . . .+ akgk(x) + Bu,
where gi (x) : Rn → Rn are compositions of uni-variable rational,exponential, logarithmic, trigonometric or root functions, respectively.Then, by iteratively taking derivatives and adding algebraic equations,respectively, Σ can be transformed into a system of QBDAEs.
Example
x1 = exp(−x2) ·√x2
1 + 1, x2 = −x2 + u.
z1 := exp(−x2), z2 :=√
x21 + 1.
x1 = z1 · z2, x2 = −x2 + u, z1 = −z1 · (−x2 + u) = z1 · x2− z1 · u,z2 = 2·x1·z1·z2
2·z2= x1 · z1.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 6/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Quadratic-Bilinear Control SystemsTransformation via McCormick Relaxation [McCormick ’76]
Theorem [Gu’09]
Assume that the state equation of a nonlinear system Σ is given by
x = a0x + a1g1(x) + . . .+ akgk(x) + Bu,
where gi (x) : Rn → Rn are compositions of uni-variable rational,exponential, logarithmic, trigonometric or root functions, respectively.Then, by iteratively taking derivatives and adding algebraic equations,respectively, Σ can be transformed into a system of QBDAEs.
Example
x1 = exp(−x2) ·√x2
1 + 1, x2 = −x2 + u.
z1 := exp(−x2), z2 :=√
x21 + 1.
x1 = z1 · z2, x2 = −x2 + u, z1 = −z1 · (−x2 + u) = z1 · x2− z1 · u,z2 = 2·x1·z1·z2
2·z2= x1 · z1.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 6/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Quadratic-Bilinear Control SystemsTransformation via McCormick Relaxation [McCormick ’76]
Theorem [Gu’09]
Assume that the state equation of a nonlinear system Σ is given by
x = a0x + a1g1(x) + . . .+ akgk(x) + Bu,
where gi (x) : Rn → Rn are compositions of uni-variable rational,exponential, logarithmic, trigonometric or root functions, respectively.Then, by iteratively taking derivatives and adding algebraic equations,respectively, Σ can be transformed into a system of QBDAEs.
Example
x1 = exp(−x2) ·√x2
1 + 1, x2 = −x2 + u.
z1 := exp(−x2),
z2 :=√
x21 + 1.
x1 = z1 · z2, x2 = −x2 + u, z1 = −z1 · (−x2 + u) = z1 · x2− z1 · u,z2 = 2·x1·z1·z2
2·z2= x1 · z1.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 6/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Quadratic-Bilinear Control SystemsTransformation via McCormick Relaxation [McCormick ’76]
Theorem [Gu’09]
Assume that the state equation of a nonlinear system Σ is given by
x = a0x + a1g1(x) + . . .+ akgk(x) + Bu,
where gi (x) : Rn → Rn are compositions of uni-variable rational,exponential, logarithmic, trigonometric or root functions, respectively.Then, by iteratively taking derivatives and adding algebraic equations,respectively, Σ can be transformed into a system of QBDAEs.
Example
x1 = exp(−x2) ·√x2
1 + 1, x2 = −x2 + u.
z1 := exp(−x2), z2 :=√x2
1 + 1.
x1 = z1 · z2, x2 = −x2 + u, z1 = −z1 · (−x2 + u) = z1 · x2− z1 · u,z2 = 2·x1·z1·z2
2·z2= x1 · z1.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 6/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Quadratic-Bilinear Control SystemsTransformation via McCormick Relaxation [McCormick ’76]
Theorem [Gu’09]
Assume that the state equation of a nonlinear system Σ is given by
x = a0x + a1g1(x) + . . .+ akgk(x) + Bu,
where gi (x) : Rn → Rn are compositions of uni-variable rational,exponential, logarithmic, trigonometric or root functions, respectively.Then, by iteratively taking derivatives and adding algebraic equations,respectively, Σ can be transformed into a system of QBDAEs.
Example
x1 = exp(−x2) ·√x2
1 + 1, x2 = −x2 + u.
z1 := exp(−x2), z2 :=√x2
1 + 1.
x1 = z1 · z2,
x2 = −x2 + u, z1 = −z1 · (−x2 + u) = z1 · x2− z1 · u,z2 = 2·x1·z1·z2
2·z2= x1 · z1.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 6/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Quadratic-Bilinear Control SystemsTransformation via McCormick Relaxation [McCormick ’76]
Theorem [Gu’09]
Assume that the state equation of a nonlinear system Σ is given by
x = a0x + a1g1(x) + . . .+ akgk(x) + Bu,
where gi (x) : Rn → Rn are compositions of uni-variable rational,exponential, logarithmic, trigonometric or root functions, respectively.Then, by iteratively taking derivatives and adding algebraic equations,respectively, Σ can be transformed into a system of QBDAEs.
Example
x1 = exp(−x2) ·√x2
1 + 1, x2 = −x2 + u.
z1 := exp(−x2), z2 :=√x2
1 + 1.
x1 = z1 · z2, x2 = −x2 + u,
z1 = −z1 · (−x2 + u) = z1 · x2− z1 · u,z2 = 2·x1·z1·z2
2·z2= x1 · z1.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 6/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Quadratic-Bilinear Control SystemsTransformation via McCormick Relaxation [McCormick ’76]
Theorem [Gu’09]
Assume that the state equation of a nonlinear system Σ is given by
x = a0x + a1g1(x) + . . .+ akgk(x) + Bu,
where gi (x) : Rn → Rn are compositions of uni-variable rational,exponential, logarithmic, trigonometric or root functions, respectively.Then, by iteratively taking derivatives and adding algebraic equations,respectively, Σ can be transformed into a system of QBDAEs.
Example
x1 = exp(−x2) ·√x2
1 + 1, x2 = −x2 + u.
z1 := exp(−x2), z2 :=√x2
1 + 1.
x1 = z1 · z2, x2 = −x2 + u, z1 = −z1 · (−x2 + u) = z1 · x2− z1 · u,
z2 = 2·x1·z1·z2
2·z2= x1 · z1.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 6/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Quadratic-Bilinear Control SystemsTransformation via McCormick Relaxation [McCormick ’76]
Theorem [Gu’09]
Assume that the state equation of a nonlinear system Σ is given by
x = a0x + a1g1(x) + . . .+ akgk(x) + Bu,
where gi (x) : Rn → Rn are compositions of uni-variable rational,exponential, logarithmic, trigonometric or root functions, respectively.Then, by iteratively taking derivatives and adding algebraic equations,respectively, Σ can be transformed into a system of QBDAEs.
Example
x1 = exp(−x2) ·√x2
1 + 1, x2 = −x2 + u.
z1 := exp(−x2), z2 :=√x2
1 + 1.
x1 = z1 · z2, x2 = −x2 + u, z1 = −z1 · (−x2 + u) = z1 · x2− z1 · u,z2 = 2·x1·z1·z2
2·z2= x1 · z1.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 6/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionVariational Analysis and Linear Subsystems
Analysis of nonlinear systems by variational equation approach:
consider input of the form αu(t),
nonlinear system is assumed to be a series of homogeneous nonlinearsubsystems, i.e. response should be of the form
x(t) = αx1(t) + α2x2(t) + α3x3(t) + . . . .
comparing coefficients of αi , i = 1, 2, . . . , leads to series of systems
Ex1 = Ax1 + bu,
Ex2 = Ax2 + Hx1 ⊗ x1 + Nx1u,
Ex3 = Ax3 + H (x1 ⊗ x2 + x2 ⊗ x1) + Nx2u
...
although i-th subsystem is coupled nonlinearly to preceding systems,linear systems are obtained if terms xj , j < i , are interpreted aspseudo-inputs.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 7/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionVariational Analysis and Linear Subsystems
Analysis of nonlinear systems by variational equation approach:
consider input of the form αu(t),
nonlinear system is assumed to be a series of homogeneous nonlinearsubsystems, i.e. response should be of the form
x(t) = αx1(t) + α2x2(t) + α3x3(t) + . . . .
comparing coefficients of αi , i = 1, 2, . . . , leads to series of systems
Ex1 = Ax1 + bu,
Ex2 = Ax2 + Hx1 ⊗ x1 + Nx1u,
Ex3 = Ax3 + H (x1 ⊗ x2 + x2 ⊗ x1) + Nx2u
...
although i-th subsystem is coupled nonlinearly to preceding systems,linear systems are obtained if terms xj , j < i , are interpreted aspseudo-inputs.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 7/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionVariational Analysis and Linear Subsystems
Analysis of nonlinear systems by variational equation approach:
consider input of the form αu(t),
nonlinear system is assumed to be a series of homogeneous nonlinearsubsystems, i.e. response should be of the form
x(t) = αx1(t) + α2x2(t) + α3x3(t) + . . . .
comparing coefficients of αi , i = 1, 2, . . . , leads to series of systems
Ex1 = Ax1 + bu,
Ex2 = Ax2 + Hx1 ⊗ x1 + Nx1u,
Ex3 = Ax3 + H (x1 ⊗ x2 + x2 ⊗ x1) + Nx2u
...
although i-th subsystem is coupled nonlinearly to preceding systems,linear systems are obtained if terms xj , j < i , are interpreted aspseudo-inputs.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 7/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionVariational Analysis and Linear Subsystems
Analysis of nonlinear systems by variational equation approach:
consider input of the form αu(t),
nonlinear system is assumed to be a series of homogeneous nonlinearsubsystems, i.e. response should be of the form
x(t) = αx1(t) + α2x2(t) + α3x3(t) + . . . .
comparing coefficients of αi , i = 1, 2, . . . , leads to series of systems
Ex1 = Ax1 + bu,
Ex2 = Ax2 + Hx1 ⊗ x1 + Nx1u,
Ex3 = Ax3 + H (x1 ⊗ x2 + x2 ⊗ x1) + Nx2u
...
although i-th subsystem is coupled nonlinearly to preceding systems,linear systems are obtained if terms xj , j < i , are interpreted aspseudo-inputs.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 7/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionVariational Analysis and Linear Subsystems
Analysis of nonlinear systems by variational equation approach:
consider input of the form αu(t),
nonlinear system is assumed to be a series of homogeneous nonlinearsubsystems, i.e. response should be of the form
x(t) = αx1(t) + α2x2(t) + α3x3(t) + . . . .
comparing coefficients of αi , i = 1, 2, . . . , leads to series of systems
Ex1 = Ax1 + bu,
Ex2 = Ax2 + Hx1 ⊗ x1 + Nx1u,
Ex3 = Ax3 + H (x1 ⊗ x2 + x2 ⊗ x1) + Nx2u
...
although i-th subsystem is coupled nonlinearly to preceding systems,linear systems are obtained if terms xj , j < i , are interpreted aspseudo-inputs.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 7/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionGeneralized Transfer Functions
In a similar way, a series of generalized symmetric transfer functions canbe obtained via the growing exponential approach:
H1(s1) = cT (s1E − A)−1b︸ ︷︷ ︸G1(s1)
,
H2(s1, s2) =1
2!cT ((s1 + s2)E − A)−1 [N (G1(s1) + G1(s2))
+H (G1(s1)⊗ G1(s2) + G1(s2)⊗ G1(s1))] ,
H3(s1, s2, s3) =1
3!cT ((s1 + s2 + s3)E − A)−1[
N(G2(s1, s2) + G2(s2, s3) + G2(s1, s3))
+ H(G1(s1)⊗ G2(s2, s3) + G1(s2)⊗ G2(s1, s3)
+ G1(s3)⊗ G2(s1, s3) + G2(s2, s3)⊗ G1(s1)
+ G2(s1, s3)⊗ G1(s2) + G2(s1, s2)⊗ G1(s3))].
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 8/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionGeneralized Transfer Functions
In a similar way, a series of generalized symmetric transfer functions canbe obtained via the growing exponential approach:
H1(s1) = cT (s1E − A)−1b︸ ︷︷ ︸G1(s1)
,
H2(s1, s2) =1
2!cT ((s1 + s2)E − A)−1 [N (G1(s1) + G1(s2))
+H (G1(s1)⊗ G1(s2) + G1(s2)⊗ G1(s1))] ,
H3(s1, s2, s3) =1
3!cT ((s1 + s2 + s3)E − A)−1[
N(G2(s1, s2) + G2(s2, s3) + G2(s1, s3))
+ H(G1(s1)⊗ G2(s2, s3) + G1(s2)⊗ G2(s1, s3)
+ G1(s3)⊗ G2(s1, s3) + G2(s2, s3)⊗ G1(s1)
+ G2(s1, s3)⊗ G1(s2) + G2(s1, s2)⊗ G1(s3))].
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 8/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionGeneralized Transfer Functions
In a similar way, a series of generalized symmetric transfer functions canbe obtained via the growing exponential approach:
H1(s1) = cT (s1E − A)−1b︸ ︷︷ ︸G1(s1)
,
H2(s1, s2) =1
2!cT ((s1 + s2)E − A)−1 [N (G1(s1) + G1(s2))
+H (G1(s1)⊗ G1(s2) + G1(s2)⊗ G1(s1))] ,
H3(s1, s2, s3) =1
3!cT ((s1 + s2 + s3)E − A)−1[
N(G2(s1, s2) + G2(s2, s3) + G2(s1, s3))
+ H(G1(s1)⊗ G2(s2, s3) + G1(s2)⊗ G2(s1, s3)
+ G1(s3)⊗ G2(s1, s3) + G2(s2, s3)⊗ G1(s1)
+ G2(s1, s3)⊗ G1(s2) + G2(s1, s2)⊗ G1(s3))].
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 8/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionGeneralized Transfer Functions
In a similar way, a series of generalized symmetric transfer functions canbe obtained via the growing exponential approach:
H1(s1) = cT (s1E − A)−1b︸ ︷︷ ︸G1(s1)
,
H2(s1, s2) =1
2!cT ((s1 + s2)E − A)−1 [N (G1(s1) + G1(s2))
+H (G1(s1)⊗ G1(s2) + G1(s2)⊗ G1(s1))] ,
H3(s1, s2, s3) =1
3!cT ((s1 + s2 + s3)E − A)−1[
N(G2(s1, s2) + G2(s2, s3) + G2(s1, s3))
+ H(G1(s1)⊗ G2(s2, s3) + G1(s2)⊗ G2(s1, s3)
+ G1(s3)⊗ G2(s1, s3) + G2(s2, s3)⊗ G1(s1)
+ G2(s1, s3)⊗ G1(s2) + G2(s1, s2)⊗ G1(s3))].
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 8/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionConstructing the Projection Matrix
Goal: ∂
∂sq−11
H1(σ) = ∂
∂sq−11
H1(σ), ∂∂s l1s
m2
H2(σ, σ) = ∂∂s l1s
m2
H2(σ, σ), l + m ≤ q − 1
Construct the following sequence of nested Krylov subspaces
V1 =Kq
((A− σE )−1E , (A1 − σE )−1b
)for i = 1 : q
V i2 = Kq−i+1
((A− 2σE )−1E , (A− 2σE )−1NV1(:, i)
),
for j = 1 : min(q − i + 1, i)
V i,j3 = Kq−i−j+2
((A− 2σE )−1E , (A− 2σE )−1HV1(:, i)⊗ V1(:, j)
),
V1(:, i) denoting the i-th column of V1. Set V = orth(
[V1,Vi2 ,V
i,j3 ])
and construct Σ by the Galerkin-Projection P = VVT :
A = VTAV ∈ Rn×n, H = VTH(V ⊗ V) ∈ Rn×n2
,
N = VTNV ∈ Rn×n, b = VTb ∈ Rn, cT = cTV ∈ Rn.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 9/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionConstructing the Projection Matrix
Goal: ∂
∂sq−11
H1(σ) = ∂
∂sq−11
H1(σ), ∂∂s l1s
m2
H2(σ, σ) = ∂∂s l1s
m2
H2(σ, σ), l + m ≤ q − 1
Construct the following sequence of nested Krylov subspaces
V1 =Kq
((A− σE )−1E , (A1 − σE )−1b
)
for i = 1 : q
V i2 = Kq−i+1
((A− 2σE )−1E , (A− 2σE )−1NV1(:, i)
),
for j = 1 : min(q − i + 1, i)
V i,j3 = Kq−i−j+2
((A− 2σE )−1E , (A− 2σE )−1HV1(:, i)⊗ V1(:, j)
),
V1(:, i) denoting the i-th column of V1. Set V = orth(
[V1,Vi2 ,V
i,j3 ])
and construct Σ by the Galerkin-Projection P = VVT :
A = VTAV ∈ Rn×n, H = VTH(V ⊗ V) ∈ Rn×n2
,
N = VTNV ∈ Rn×n, b = VTb ∈ Rn, cT = cTV ∈ Rn.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 9/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionConstructing the Projection Matrix
Goal: ∂
∂sq−11
H1(σ) = ∂
∂sq−11
H1(σ), ∂∂s l1s
m2
H2(σ, σ) = ∂∂s l1s
m2
H2(σ, σ), l + m ≤ q − 1
Construct the following sequence of nested Krylov subspaces
V1 =Kq
((A− σE )−1E , (A1 − σE )−1b
)for i = 1 : q
V i2 = Kq−i+1
((A− 2σE )−1E , (A− 2σE )−1NV1(:, i)
),
for j = 1 : min(q − i + 1, i)
V i,j3 = Kq−i−j+2
((A− 2σE )−1E , (A− 2σE )−1HV1(:, i)⊗ V1(:, j)
),
V1(:, i) denoting the i-th column of V1. Set V = orth(
[V1,Vi2 ,V
i,j3 ])
and construct Σ by the Galerkin-Projection P = VVT :
A = VTAV ∈ Rn×n, H = VTH(V ⊗ V) ∈ Rn×n2
,
N = VTNV ∈ Rn×n, b = VTb ∈ Rn, cT = cTV ∈ Rn.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 9/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionConstructing the Projection Matrix
Goal: ∂
∂sq−11
H1(σ) = ∂
∂sq−11
H1(σ), ∂∂s l1s
m2
H2(σ, σ) = ∂∂s l1s
m2
H2(σ, σ), l + m ≤ q − 1
Construct the following sequence of nested Krylov subspaces
V1 =Kq
((A− σE )−1E , (A1 − σE )−1b
)for i = 1 : q
V i2 = Kq−i+1
((A− 2σE )−1E , (A− 2σE )−1NV1(:, i)
),
for j = 1 : min(q − i + 1, i)
V i,j3 = Kq−i−j+2
((A− 2σE )−1E , (A− 2σE )−1HV1(:, i)⊗ V1(:, j)
),
V1(:, i) denoting the i-th column of V1.
Set V = orth(
[V1,Vi2 ,V
i,j3 ])
and construct Σ by the Galerkin-Projection P = VVT :
A = VTAV ∈ Rn×n, H = VTH(V ⊗ V) ∈ Rn×n2
,
N = VTNV ∈ Rn×n, b = VTb ∈ Rn, cT = cTV ∈ Rn.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 9/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionConstructing the Projection Matrix
Goal: ∂
∂sq−11
H1(σ) = ∂
∂sq−11
H1(σ), ∂∂s l1s
m2
H2(σ, σ) = ∂∂s l1s
m2
H2(σ, σ), l + m ≤ q − 1
Construct the following sequence of nested Krylov subspaces
V1 =Kq
((A− σE )−1E , (A1 − σE )−1b
)for i = 1 : q
V i2 = Kq−i+1
((A− 2σE )−1E , (A− 2σE )−1NV1(:, i)
),
for j = 1 : min(q − i + 1, i)
V i,j3 = Kq−i−j+2
((A− 2σE )−1E , (A− 2σE )−1HV1(:, i)⊗ V1(:, j)
),
V1(:, i) denoting the i-th column of V1. Set V = orth(
[V1,Vi2 ,V
i,j3 ])
and construct Σ by the Galerkin-Projection P = VVT :
A = VTAV ∈ Rn×n, H = VTH(V ⊗ V) ∈ Rn×n2
,
N = VTNV ∈ Rn×n, b = VTb ∈ Rn, cT = cTV ∈ Rn.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 9/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionTensors and Matricizations: A Short Excursion [Kolda/Bader ’09, Grasedyck ’10]
A tensor is a vector(Ai )i∈I ∈ RI
indexed by a product index set
I = I1 × · · · × Id , |Ij | = nj .
For a given tensor A, the t-matricization A(t) is defined as
A(t) ∈ RIt×It′ , A(t)(iµ)µ∈t, (iµ)µ∈t′ := A(i1,...,id ), t ′ := {1, . . . , d}\t.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 10/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionTensors and Matricizations: A Short Excursion [Kolda/Bader ’09, Grasedyck ’10]
A tensor is a vector(Ai )i∈I ∈ RI
indexed by a product index set
I = I1 × · · · × Id , |Ij | = nj .
For a given tensor A, the t-matricization A(t) is defined as
A(t) ∈ RIt×It′ , A(t)(iµ)µ∈t, (iµ)µ∈t′ := A(i1,...,id ), t ′ := {1, . . . , d}\t.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 10/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionTensors and Matricizations: A Short Excursion [Kolda/Bader ’09, Grasedyck ’10]
A tensor is a vector(Ai )i∈I ∈ RI
indexed by a product index set
I = I1 × · · · × Id , |Ij | = nj .
For a given tensor A, the t-matricization A(t) is defined as
A(t) ∈ RIt×It′ , A(t)(iµ)µ∈t, (iµ)µ∈t′ := A(i1,...,id ), t ′ := {1, . . . , d}\t.
Example: For a given 3-tensor A(i1,i2,i3) with i1, i2, i3 ∈ {1, 2}, we have:
A(1) =
[A(1,1,1) A(1,2,1) A(1,1,2) A(1,2,2)
A(2,1,1) A(2,2,1) A(2,1,2) A(2,2,2)
],
A(2) =
[A(1,1,1) A(2,1,1) A(1,1,2) A(2,1,2)
A(1,2,1) A(2,2,1) A(1,2,2) A(2,2,2)
].
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 10/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionTensors and Matricizations: A Short Excursion [Kolda/Bader ’09, Grasedyck ’10]
A tensor is a vector(Ai )i∈I ∈ RI
indexed by a product index set
I = I1 × · · · × Id , |Ij | = nj .
For a given tensor A, the t-matricization A(t) is defined as
A(t) ∈ RIt×It′ , A(t)(iµ)µ∈t, (iµ)µ∈t′ := A(i1,...,id ), t ′ := {1, . . . , d}\t.
Allows to compute matrix products more efficiently.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 10/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionTwo-Sided Projection Methods
Similarly to the linear case, one can exploit duality concepts, in order toconstruct two-sided projection methods.
Interpreting H(2) now as the 2-matricization of the Hessian 3-tensor fromRn×n×n, one can show that the dual Krylov spaces have to beconstructed as follows:
W1 =Kq
((A− 2σE)−TET , (A− 2σE)−T c
)for i = 1 : q
W i2 = Kq−i+1
((A− σE)−TET , (A− σE)−TNTW1(:, i)
),
for j = 1 : min(q − i + 1, i)
W i,j3 = Kq−i−j+2
((A− σE)−TET , (A− σE)−TH(2)V1(:, i)⊗W1(:, j)
),
Note: Due to the symmetry of the Hessian tensor, the 3-matricizationH(3) coincides with H(2).
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 11/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionTwo-Sided Projection Methods
Similarly to the linear case, one can exploit duality concepts, in order toconstruct two-sided projection methods.
Interpreting H(2) now as the 2-matricization of the Hessian 3-tensor fromRn×n×n, one can show that the dual Krylov spaces have to beconstructed as follows:
W1 =Kq
((A− 2σE)−TET , (A− 2σE)−T c
)for i = 1 : q
W i2 = Kq−i+1
((A− σE)−TET , (A− σE)−TNTW1(:, i)
),
for j = 1 : min(q − i + 1, i)
W i,j3 = Kq−i−j+2
((A− σE)−TET , (A− σE)−TH(2)V1(:, i)⊗W1(:, j)
),
Note: Due to the symmetry of the Hessian tensor, the 3-matricizationH(3) coincides with H(2).
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 11/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionTwo-Sided Projection Methods
Similarly to the linear case, one can exploit duality concepts, in order toconstruct two-sided projection methods.
Interpreting H(2) now as the 2-matricization of the Hessian 3-tensor fromRn×n×n, one can show that the dual Krylov spaces have to beconstructed as follows:
W1 =Kq
((A− 2σE)−TET , (A− 2σE)−T c
)for i = 1 : q
W i2 = Kq−i+1
((A− σE)−TET , (A− σE)−TNTW1(:, i)
),
for j = 1 : min(q − i + 1, i)
W i,j3 = Kq−i−j+2
((A− σE)−TET , (A− σE)−TH(2)V1(:, i)⊗W1(:, j)
),
Note: Due to the symmetry of the Hessian tensor, the 3-matricizationH(3) coincides with H(2).
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 11/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Nonlinear Model ReductionMultimoment matching
Theorem
Σ = (E ,A,H,N, b, c) original QBDAE system.
Reduced system by Petrov-Galerkin projection P = VWT with
V1 = Kq1 (E ,A, b, σ) , W1 = Kq1
(ET ,AT , c, 2σ
)for i = 1 : q2
V2 = Kq2−i+1 (E ,A,NV1(:, i), 2σ)
W2 = Kq2−i+1
(ET ,AT ,NTW1(:, i), σ
)for j = 1 : min(q2 − i + 1, i)
V3 = Kq2−i−j+2 (E ,A,HV1(:, i)⊗ V1(:, j), 2σ)
W3 = Kq2−i−j+2
(ET ,AT ,H(2)V1(:, i)⊗W1(:, j), σ
).
Then, it holds:
∂ iH1
∂s i1(σ) =
∂ i H1
∂s i1(σ),
∂ iH1
∂s i1(2σ) =
∂ i H1
∂s i1(2σ), i = 0, . . . , q1 − 1,
∂ i+j
∂s i1sj2
H2(σ, σ) =∂ i+j
∂s i1sj2
H2(σ, σ), i + j ≤ 2q2 − 1.
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 12/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Numerical ExamplesA nonlinear RC Circuit
i=
u(t
)
v1
g(v
) C
g(v) g(v)
v2
C C
g(v)
vξ−1
C
g(v)
vξ
C
g(v) = e40v + v − 1, C = 1,
v(t) = f (v(t), g(v(t))) + Bu(t)
y(t) = v1(t)
state-nonlinear control system
’clever’ transformation only doubles the state dimension of theresulting quadratic-bilinear system
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 13/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Numerical ExamplesA nonlinear RC Circuit
Comparison between moment-matching and POD (u(t) = e−t)
0 0.5 1 1.5 2
0.005
0.01
0.015
0.02
Time (t)
y(t
)
Transient response
0 0.5 1 1.5 210−8
10−4
100
Time (t)
Relative error
Original system, n = 1500 1-sided proj., n = 112-sided proj., n = 11 POD, n = 11
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 13/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Numerical ExamplesA nonlinear RC Circuit
Comp. between moment-matching and POD (u(t) = (cos(2π t10) + 1)/2)
0 2 4 6 8 10
0.005
0.01
0.015
0.02
Time (t)
y(t
)
Transient response
0 0.5 1 1.5 210−6
10−3
100
Time (t)
Relative error
Original system, n = 1500 1-sided proj., n = 112-sided proj., n = 11 POD, n = 11
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 13/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Numerical ExamplesThe Chafee-Infante equation
Let us consider a cubic nonlinear PDE of the form
vt + v3 = vxx + v , in (0, 1)× (0,T ),
v(0, ·) = u(t), in (0,T ),
vx(1, ·) = 0, in (0,T ),
v(x , 0) = v0(x), in (0, 1)
original state dimension n = 500, QBDAE dimension N = 2 · 500,reduced QBDAE dimension r = 9
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 14/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Numerical ExamplesThe Chafee-Infante equation
Comparison between moment-matching and POD (u(t) = 5 cos (t))
0 2 4 6 8 10−2
−1
0
1
2
Time (t)
y(t
)
FOM, n = 500POD, n = 91-sided MM, n = 92-sided MM, n = 9
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 15/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Numerical ExamplesThe Chafee-Infante equation
Comp. between moment-matching and POD (u(t) = 50 sin (t))
0 2 4 6 8 10−4
−2
0
2
4
Time (t)
y(t
)
FOM, n = 500POD, n = 91-sided MM, n = 92-sided MM, n = 9
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 16/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
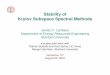
Numerical ExamplesThe FitzHugh-Nagumo System
FitzHugh-Nagumo system modeling a neuron[Chaturantabut, Sorensen ’09]
εvt(x , t) = ε2vxx(x , t) + f (v(x , t))− w(x , t) + g ,
wt(x , t) = hv(x , t)− γw(x , t) + g ,
with f (v) = v(v − 0.1)(1− v) and initial and boundary conditions
v(x , 0) = 0, w(x , 0) = 0, x ∈ [0, 1],
vx(0, t) = −i0(t), vx(1, t) = 0, t ≥ 0,
whereε = 0.015, h = 0.5, γ = 2, g = 0.05, i0(t) = 5 · 104t3 exp(−15t)
original state dimension n = 2 · 1000, QBDAE dimensionN = 3 · 1000, reduced QBDAE dimension r = 20
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 17/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Numerical ExamplesThe FitzHugh-Nagumo System
Limit cycle behavior for 1-sided proj. (ROM, n = 20 , σ = 4)
00.2
0.4
−0.50
0.51
1.50
0.1
0.2
xv(x , t)
w(x,t
)
Orig. system, n = 20001-sided proj., n = 20, σ = 4
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 18/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Numerical ExamplesThe FitzHugh-Nagumo System
POD via moment-matching (training input)
−0.4 −0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.40
5 · 10−2
0.1
0.15
0.2
v(t)
w(t
)
FOM, n = 2000POD, n = 22POD-MM, n = 22
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 19/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Numerical ExamplesThe FitzHugh-Nagumo System
POD via moment-matching (varying input)
−1 0 1 2 3 4 50
0.1
0.2
0.3
0.4
v(t)
w(t
)
FOM, n = 2000POD, n = 22POD-MM, n = 22
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 20/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Conclusions and Outlook
Many nonlinear dynamics can be expressed by a system ofquadratic-bilinear differential algebraic equations.
For these type of systems, a frequency domain analysis leads tocertain generalized transfer functions.
There exist Krylov subspace methods that extend the concept ofmoment-matching using basic tools from tensor theory allows forbetter approximations.
In contrast to other methods like TPWL and POD, the reductionprocess is independent of the control input.
Optimal choice of interpolation points?
Stability-preserving reduction possible?
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 21/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Conclusions and Outlook
Many nonlinear dynamics can be expressed by a system ofquadratic-bilinear differential algebraic equations.
For these type of systems, a frequency domain analysis leads tocertain generalized transfer functions.
There exist Krylov subspace methods that extend the concept ofmoment-matching using basic tools from tensor theory allows forbetter approximations.
In contrast to other methods like TPWL and POD, the reductionprocess is independent of the control input.
Optimal choice of interpolation points?
Stability-preserving reduction possible?
Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 21/22

Motivation Quadratic-Bilinear Control Systems Nonlinear Model Reduction Numerical Examples Conclusions and Outlook
Last but not least. . .
[image source: Heike Faßbender]
Happy birthday, Nancy!Max-Planck-Institut Magdeburg P. Benner, Krylov Subspace Methods for Nonlinear Model Reduction 22/22



![Deflation and augmentation techniques in Krylov …introduction to Krylov subspace methods and to [74] for a recent overview on Krylov subspace methods; see also [20, 21] for an advanced](https://img.pdfslide.us/doc/110x75/5edc1784ad6a402d66669cc6/deiation-and-augmentation-techniques-in-krylov-introduction-to-krylov-subspace.jpg)










![COMPUTING APPROXIMATE (BLOCK) RATIONAL ......Krylov subspace, as we have already shown for extended Krylov subspaces in [17]. Block Krylov subspace methods are an extension of Krylov](https://img.pdfslide.us/doc/110x75/5edc1787ad6a402d66669cca/computing-approximate-block-rational-krylov-subspace-as-we-have-already.jpg)












