-
1Neighborhood Filtering Strategiesfor Overlay Construction in
P2P-TV Systems:
Design and Experimental ComparisonStefano Traverso Member, IEEE,
Luca Abeni Member, IEEE, Robert Birke Member, IEEE,
Csaba Kiraly Member, IEEE, Emilio Leonardi Senior Member,
IEEE,Renato Lo Cigno Senior Member, IEEE, Marco Mellia Senior
Member, IEEE
AbstractPeer-to-Peer live-streaming (P2P-TV) systems goal
isdisseminating real time video content using Peer-to-Peer
technol-ogy. Their performance is driven by the overlay topology,
i.e., thevirtual topology that peers use to exchange video chunks.
Severalproposals have been made in the past to optimize it, yet
fewexperimental studies have corroborated results. The aim of
thispaper is to provide a comprehensive experimental
comparisonbased on PeerStreamer, in order to benchmark different
strate-gies for the construction and maintenance of the overlay
topologyin P2P-TV systems. We present only experimental results
inwhich fully-distributed strategies are evaluated in both
controlledexperiments, and the Internet, using thousands of
peers.
Results confirm that the topological properties of the
overlayhave a deep impact on both user quality of experience
andnetwork load. Strategies based solely on random peer
selectionare greatly outperformed by smart, yet simple and actually
im-plementable strategies. The most performing strategy we
deviseguarantees to deliver almost all chunks to all peers with a
play-out delay as low as 6 seconds even when system load
approaches1, and in almost adversarial network scenarios.
PeerStreameris Open Source to make results reproducible and allow
furtherresearch by the community.
I. INTRODUCTION
Peer-to-Peer live streaming (P2P-TV) applications haveemerged as
valid alternative to offer cheap live video streamingover the
Internet. Real-time TV programs are delivered tomillions of users
thanks to the high scalability and low costsof the P2P paradigm.
Yet, exploiting the available resourcesat peers is a critical
aspect, and calls for a very careful designand engineering of the
application.
Similarly to file sharing P2P systems, in P2P-TV systemsthe
video content is sliced in pieces called chunks, whichare
distributed onto an overlay topology (typically a genericmesh).
But, contrary to file sharing P2P systems, chunks aregenerated in
real time, sequentially and (in general) period-ically. They must
also be received by the peers within a
Stefano Traverso, Emilio Leonardi and Marco Mellia are with the
Depart-ment of Electronic and Telecommunications (DET), Politecnico
di Torino,Italy; e-mail: {lastname}@tlc.polito.it
Luca Abeni and Renato Lo Cigno are with the Department of
InformationEngineering and Computer Science (DISI), Univesity of
Trento, Italy; e-mail{luca.abeni,renato.locigno}@unitn.it
Csaba Kiraly is with Fondazione Bruno Kessler (FBK), Trento,
Italy; e-mail: [email protected]. Csaba Kiraly was with DISI,
University of Trentoat the time of this work.
Robert Birke is with IBM Research Zurich Lab., Switzerland;
e-mail:[email protected]
deadline to enable real time playback. Chunk timely deliveryis
thus the key aspect of P2P-TV systems. This makes thedesigns of
P2P-TV systems and P2P file sharing applicationsdeeply
different.
Building a mesh-based P2P-TV system, there are two keycomponents
driving performance: i) the algorithms adoptedto build and maintain
the overlay topology [1], [2], [3], [4],[5], [6], and ii) the
algorithms employed to trade chunks [7],[8], [9]. We explicitly
focus on the first problem, decouplingits performance from the
choice of chunk trading algorithm.Most of the previous works have
mainly a theoretical flavor,where performance analysis has been
carried out in ratheridealized scenarios, by means of simulations
or analyticalmodels [3], [4], [5], [6]. Few works undergo
implementationand present actual experiments, and even those are
usuallylimited to few tens of peers [10], [11]. See also Sect. VIII
fora more complete presentation of the related works.
The goal of this paper is to fill this gap: by using the
Peer-Streamer P2P-TV application, we present a comprehensive
andpurely experimental benchmarking of different strategies forthe
construction and the maintenance of the overlay topol-ogy for
P2P-TV systems. We thoroughly evaluate differentpolicies, assessing
the impact of signaling, measurements,implementation issues, etc.
Both synthetic scenarios and Plan-etLab experiments are proposed.
The first allows assessing theproperties of the different
algorithms in increasingly adver-sarial scenarios. In such
scenarios we have the full controlof all network parameters, thus
they form a scientific andreproducible benchmarking set. The second
permits us tofurther check the validity of the previous conclusions
withinthe Internet, where unpredictable uncertainty has to be
faced.
The system design we present is fully distributed. No
cen-tralized tracker or oracle is assumed, and peers collaborateto
find the best configuration to use. Topology constructionalgorithms
are based on selection and replacement criteriaaccording to which
each peer chooses the peers it would liketo download chunks from.
This turns out to be very simpleand easy to implement. A
blacklist-like hysteresis preventspeers to select neighbours
previously discarded due to poorperformance. Overall, we explore 12
different combinationsof criteria (24 with blacklisting), based on
metrics such asRound Trip Time (RTT), upload capacity, number of
receivedchunks, etc. Their performance is thoroughly benchmarked
byrunning fairly large scale experiments (thousands of peers)
-
2under different system and network conditions. Measurementsare
performed considering first traditional Quality of Ser-vice (QoS)
metrics (e.g., frame loss, delivery delay, etc.) toprune those
combinations that perform poorly. Afterwards, weconsider the
Quality of Experience (QoE), measured by theStructural Similarity
Index (SSIM) [12], to include all elementsin the P2P-TV video
distribution chain. The results presentedhave been collected in
experiments that amount to more than1500 hours of tests.
While the intuition and ideas of our algorithms are simpleand
well understood in the community, their actual imple-mentation and
experimental validation constitute a major steptoward the
engineering of large scale P2P-TV live streamingsystems. As such,
the guidelines and results presented in thispaper may be useful for
researchers, designers and developersinterested in P2P-TV
application. Our tests show that evensimple improvements to a
random-based policy for the over-lay construction may lead to
significant QoE enhancement.Finally, we highlight that the software
used in this paper isreleased as Open Source and includes all the
componentsnecessary to build a fully functional P2P-TV system
includingvideo transcoding at the source and play-out at
clients.
A preliminary version of this paper was presented in [13].In
this version we include an additional scenario devised tobring the
system to its limits, and we extend the experimentsusing PlanetLab.
Finally, we introduce some theoretical con-siderations to support
algorithm design choices.
II. PEERSTREAMER DESCRIPTION
Empowering this work is PeerStreamer1, an Open SourceP2P-TV
system that stems from the developments and researchof the
NAPA-WINE project [14], whose overall architectureand vision are
described in [15]. PeerStreamer leverages GRA-PES [16], a set of C
libraries implementing blocks that enablebuilding P2P-TV
applications with almost arbitrary charac-teristics, thus allowing
experimental comparison of differentchoices. Fig. 1 describes the
logic and modular organizationof PeerStreamer. The overlay
management, the focus of thispaper, is detailed in Sect. II-B,
while in the following wesketch the high level organization of the
other applicationcomponents.
A. PeerStreamer Architecture
PeerStreamer is based on chunk diffusion. Each peer offersa
selection of the chunks it possesses to some peers in
itsneighborhood. The receiving peer acknowledge the chunks itis
interested in, thus avoiding multiple transmissions of thesame
chunk to the same peer. The negotiation and chunktransmission phase
is based on signaling exchanges withOffer and Select messages. For
chunk scheduling, Offersare sent to neighbors in round-robin. They
contain the buffer-map of the most recent chunks the sender
possesses at thattime. After receiving an Offer, a peer selects one
chunk basedon a latest useful policy, and sends back a Select
message.This has been proven optimal for streaming systems with
1Available at http://www.peerstreamer.org
FFMPEGor equiv.
FFMPEGor equiv. CHUNKIZER
CHUNK BUFFER
SCHEDULING ANDOFFERING CHUNKS
MAINLOOP
PEERSAMPLER
MONITORINGAND MEASURES
DECHUNKIZER
MESSAGING, TCP, UDP, NAT TRAVERSAL, ...
Content Playout or generation
Chunk Trading Protocol
Overlay Management
NEIGHBORHOODMANAGER
Figure 1. PeerStreamer peer architecture.
centralized and distributed scheduling associated to
specificpeer choices in [7], [9]. The number of offers per second a
peersends plays a key role in performance. Intuitively, it shouldbe
large enough to fully exploit the peer upload capacity,but it must
not be too large to cause the accumulation ofchunks to be
transmitted adding queuing delay prior to chunktransmissions. We
adopt Hose Rate Control (HRC) proposedin [17] to automatically
adapt the number of offers to peerupload capacity and system
demand. Simpler trading schemesare less performing and can hide the
impact of the overlay onthe overall system performance.
The source is a standard peer, but it does not participatein the
Offer/Select protocol. It simply injects copies (5 in
ourexperiments) of the newly generated chunk into the overlay.It
implements a chunkiser to process the media stream (e.g.,a live
stream coming from a DVB-T card, or from a web-cam). The chunking
strategy used in PeerStreamer is chosento avoid mingling its
effects with the topology-related ones:one-frame is encapsulated
into one-chunk to avoid that amissing chunk would impair several
frames due to, e.g.,missing frame headers. The chunkiser is
implemented usingthe ffmpeg libraries2, so that several different
codecs (e.g.,MPEG, theora, H.264, etc.) are supported. Receiving
peers,instead, implement a de-chunkiser, which reads from the
localchunk buffer and pushes the chunks in the correct sequenceto
the play-out system.
The main loop (at the center of Fig. 1) implements theglobal
application logic. It is responsible for the correct timingand
execution of both semi-periodic tasks, e.g., sending newoffers, and
asynchronous activities, e.g., the arrival of a chunkor signaling
message from the messaging layer.
The PeerStreamer architecture is completed by the messag-ing and
monitoring and measures modules. The messagingmodule is a network
abstraction layer that masks the appli-cation from all details of
the networking environment, e.g.,the presence of NAT, middle-boxes
and other communicationdetails. It offers a connection-oriented
service on top of UDP,with a lightweight retransmission mechanism
that allows therecovery of lost packets with low retransmission
delay.
The monitoring and measures module extracts network in-formation
by running passive and/or active measurements [15].
2http://www.ffmpeg.org
-
3In this paper we rely on the measurements of i) end-to-endpath
delay between peers (e.g., RTT), ii) packet loss rate, andiii)
transmission rate of a peer.
B. Overlay Management
The approach for building the overlay topology in Peer-Streamer
is fully distributed: each peer builds its own neigh-borhood
following only local measures, rules and peer sam-pling. The
overlay topology is represented by a directed graphin which the
peer at the edge head receives chunks from thepeer at the edge
tail, which is the one sending Offers. Eachpeer p handles thus an
in-neighborhood NI(p) and an out-neighborhood NO(p). NI(p) collects
all peers that can sendchunks to p (p in-neighbors); NO(p) collects
all peers that canreceive chunks from p (p out-neighbors).
Alternatively, NI(p)is the set of peers that Offer p new chunks;
while p Offers itschunks to peers in NO(p). Distinguishing between
NI(p) andNO(p) guarantees a larger flexibility in topology
managementthan algorithms imposing the reciprocity between peers.
Theoverlay topology TS is then obtained as union of all the
edgesconnecting peers in NI(p) to p, i.e.:
TS =pSNI(p) {p} (1)
where S is the set of all the peers in the swarm and the symbol
denotes the Cartesian product operator3.
Referring again to Fig. 1, the topology management is splitinto
two separate functions. The peer sampler has the goal ofproviding p
with a stochastically good sample of all the peersin S and their
properties: PeerStreamer implements a variationof Newscast [18] for
this function. The neighborhood managerinstead realizes the task of
filtering the most appropriate peersfor interaction. Filtering is
based on appropriate metrics andmeasures, and it is the main focus
of this paper.
III. NEIGHBORHOOD AND TOPOLOGY CONSTRUCTION
In PeerStreamer every peer p selects other peers as in-neighbors
and establishes a management connection withthem. Thus each peer p
actively selects in-neighbors to possi-bly download chunks when
building the set NI(p). Similarly,p passively accepts contacts from
other peers that will form theset NO(p) of out-neighbors. There is
no limitation to NO(p)4.
Every peer p manages a local blacklist of peers in which itcan
put peers that were perceived as very poorly performing
in-neighbors. Peers in the blacklist cannot be selected for
inclu-sion inNI(p). Blacklisted peers are cleared after the
expirationof a time-out (set to 50 s in the experiments). Blacklist
is usedby peers just to avoid to select underperforming parents.
Thus,even if blacklisted by some other peers, a peer is not
preventedfrom receiving the stream, as it can always be in
NO(p).
The size NI of NI(p) is equal for every peer p: its goal is
toguarantee that p has enough in-neighbors to sustain the
streamdownload with high probability in face of churn,
randomness,
3Notice that since NO(p) are built passively, they do not
contribute toconstruction of the swarm topology.
4In the actual implementation NO(p) is limited to 200 peers, but
the limitis never reached.
network fluctuations, etc. The size NO(p) of NO(p) is insteada
consequence of the filtering functions of the peers that selectp as
in-neighbor. The goal is to let the dynamic filteringfunctions of
peers q {S \ p} select NO(p) in such a waythat the swarm
performance is maximized. For example, peerswith higher upload
capacity should have larger number of out-neighbors than peers with
little or no upload capacity [4].
The update of neighborhoods is periodic, maintaining thetopology
dynamic and variable, so that churn impairment islimited, and the
swarm can adapt to evolving networkingconditions. In particular,
every Tup seconds each peer pindependently updates NI(p) by
dropping part of the old in-neighbors while adding fresh
in-neighbors. Two parametersare associated to this scheme: the
update period Tup and thefraction Fup of peers in NI(p) that is
replaced at every update.The add operation guarantees NI(p) has
size NI (if at leastNI peers are known). Overall, the in-neighbor
update rate canbe defined as
Rup =FupNITup
(2)
If not otherwise stated NI = 30, Tup = 10 s and Fup = 0.3.The
latter two values result in a good compromise betweenadaptiveness
and overhead. Their choice is robust: a sensitivityanalysis is
presented in Sect VI-C.
A. Metrics Driving the Neighborhood Selection
At every update, NI(p) is the result of two separate
filteringfunctions: one that selects the peers to drop, and another
oneselecting in-neighbors to add. For these filtering functions
weconsider both simple network attributes such as peer
uploadbandwidth, path RTT or path packet loss rate, and
someapplication layer metrics, such as the peer offer rate5
ornumber of received chunks from an in-neighbor.
Some metrics are static peer metrics: once estimated, theycan be
broadcasted with gossiping messages and are knowna-priori. Other
metrics instead are path attributes betweentwo peers and must be
measured and can only be used asa-posteriori indicators of the
quality of the considered in-neighbor as perceived by p.
Both add and drop filtering functions are probabilistic toavoid
deadlocks and guarantee a sufficient degree of random-ness.
Considering a metric, we assign a selection probabilitywq to every
candidate q as
wq =mq
sNS(p)ms(3)
where mq is the metric of q and NS is either NI for drop, orthe
set of candidate in-neighbors for add.
B. Add Filters
We consider the following four criteria to add new
in-neighbors:RND: Neighbors are chosen uniformly at random: q,mq =
1;BW: Neighbors are weighted according to their upload band-width
Cq: q,mq = Cq;
5HRC adapts the peer offer rate to peer upload capacity. It can
thus be seenas an indirect measure of its available upload
bandwidth.
-
4RTT: Neighbors are weighted according to the inverse of theRTT
between p and q: q,mq = 1/RTTq(p); if RTTq(p) isstill unknown,
RTTq(p) = 1 s6;OFF: Neighbors are weighted according to the rate
they sendoffer messages Rq: q,mq = Rq; Rq are advertized by
peers7.
C. Drop Filters
We evaluate three criteria to select neighbors to be
dropped:RND: Neighbors are dropped randomly: q,mq = 1;RTT:
Neighbors are dropped with a probability directly pro-portional to
the RTT between p and q: q,mq = RTTq(p);RXC: Neighbors are dropped
with a probability proportionalto the inverse of the rate at which
it transferred chunksto p: q,mq = 1/RXCq(p); this metric assigns a
qualityindex related to the in-neighbor ability to successfully
transferchunks to p; RXCq(p) are evaluated on a window of 3 s.
D. Blacklisting Policies
Finally a peer in NI(p) is locally blacklisted if any one ofthe
following criterion is met:CMR: the ratio of corrupted/late chunks
among the last 100chunks received by p from q exceeds a threshold
of 5%;PLOSS: the packet loss rate from q to p exceed a thresholdof
3%; measured over the last 300 packets received;RTT: RTTq(p) is
greater than 1 s.
Combining add and drop criteria we define 12 differentoverlay
construction and maintenance filters. In the following,we name them
stating the ADD-DROP policies, e.g., BW-RTT for add BW and drop
RTT. Sect. V reports results fordifferent resulting combinations.
Blacklisting can be super-posed (or not) to all of them, and its
impact will be studiedselectively. We tested also other metrics and
combinations,whose results are less interesting and not reported
here. RND-RND is used as a baseline benchmark, as it is a policy
basedon pure random sampling of the swarm.
E. A Few Theoretical Considerations
Depending on the neighbor selection strategy adopted bypeers,
the resulting overlay topology TS , as defined in (1), mayexhibit
fairly different macroscopic properties, especially when|S| grows
large. Some considerations based on elementarynotions on random
graphs will help to better understand theeffect of different
neighbors selection policies.
On the one hand, it would be highly desirable to obtain
anoverlay topology TS with very good structural properties, suchas
high node resilience, short diameter and large conductance.Observe,
indeed, that the graph theoretical concept of node re-silience can
be almost immediately re-interpreted as resilienceto peer churning,
while conductance/diameter properties of thegraph have been
recently shown to be tightly related with theminimum time needed to
spread information over a graph withhomogeneous edge capacities
[19].
6RTTq(p) are locally cached at p so that they may be available a
priori.Active measurements could also be used to quickly estimate
the RTT.
7Note that the number of offers is roughly proportional to the
availableupload bandwidth of the peer [17].
On the other hand, just structural graph properties of TSmay not
be sufficient to represent well how good the topologyis, since
peers upload bandwidth may be highly heterogeneousand edge
latencies (i.e., RTTs) may play an important role onperformance.
Neighbor selection policies should favour localedges (i.e., edges
between peers that are geographically and/ornetwork-wise close)
reducing edge latencies (with the positiveside effect of localizing
the traffic). Furthermore they shouldnot build topologies with a
constant degree of connectivity,but privilege strategies that lead
to high connectivity degreesfor high bandwidth peers to exploit
their upload resources atthe best. As it will be evident in the
following, to achieve highand reliable performance it is important
to properly balancethe previous ingredients, aiming at obtaining a
topology TSthat blends good global (topological) properties, with a
biastoward the exploitation of local properties like vicinity
andbandwidth availability.
The simplest possible selection strategy is RND-RND. It isknown
to produce an overlay topology TS with good globalproperties, and
for these reasons it is adopted by severalP2P systems [20]. Indeed
the overlay topology resulting bythe adoption of RND-RND can be
modeled as an n-regular(directed) random graph instance with n = NI
. Such graphshave high resilience (whenever n is larger than few
units),logarithmic diameter, and high conductance. The limit
ofRND-RND consists in the fact that it completely ignores
peerattributes (such as location and upload bandwidth).
Policies that select/drop neighbors according to the
peer-to-peer distances (i.e., RTTs) better localize the
neighborhoods.Of course the application can profit from
neighborhoodslocalization since message latencies/chunk transfer
times arepotentially reduced. However, a too strict localization
ofneighborhoods can jeopardize the global properties of TS ,
withdetriment of the application performance as already observedin
[5], [21], [22]. The danger of an excessive localization
ofneighborhoods can be easily explained from a graph theoret-ical
perspective; indeed geographical graphs (i.e., graphs inwhich edges
are established only between nodes which areclose with respect to
some parameter) exhibit poor diame-ter/conductance properties (the
graph diameter, for example,scales as the square root of number of
nodes in bi-dimensionalgeographical graphs). Furthermore, when
nodes are non ho-mogeneously distributed over the domain, the
topology maybecome disconnected (conductance equal to zero) even if
theaverage connectivity is high. Thus, localization must be
pushedonly up to a given point, guaranteeing the presence of
anon-marginal fraction of chords (i.e., non local edges).
Thepresence of a significant fraction of random chords
guaranteesthe resulting overlay TS to exhibit small word
properties,i.e., good diameter/conductance properties. At the same
timethe massive presence of local edges potentially permits
toreduce the negative effects of large latencies. Observe thatto
guarantee a significant amount of chords our RTT
basedselection/dropping filter are probabilistic.
The adoption of policies that select peers taking into
accountdirect or indirect measurements of the peers upload
bandwidth(such as BW or OFF) make the average out-degree
propor-
-
5Table INUMBER OF PCS PER SUBNET.
Subnet 1 2 3 4Number of PCs 43 63 60 38
Table IIRTTS IN ms BETWEEN SUBNETS OF PEERS.
1 2 3 41 20 10% 80 10% 120 10% 160 10%2 80 10% 20 10% 140 10%
240 10%3 120 10% 170 10% 20 10% 200 10%4 160 10% 240 10% 200 10% 20
10%
tional to the peer upload bandwidth8. We observe that
thesepolicies directly influence the conductance of the resulting
TS ,as they increase average weight of edges. This is due to
aglobal policy whose goal is building an n-regular directedgraph,
so that the number of edges in the topology is roughlyconstant.
Having more edges insisting on high bandwidth linksand less on low
bandwidth ones increases the average weight.
It is harder, instead, to predict the effect on TS of
theadoption of RXC dropping filters. In this case, we attemptto
correlate neighbor filtering decisions to an estimate of thereal
neighbors quality, with the goal of preserving the bestin-neighbors
(peers that have shown to be helpful in retrievingchunks in the
recent past) while discarding bad in-neighbors(peers that were
scarcely helpful). It can be argued, however,that also in this case
the outcome of the strategy is an increasedtopology conductance, as
the actual or a-posteriori weightof edges is proportional to the
amount of chunks correctlytransferred along it. Again we ensure
that a significant amountof random edges are in TS by adopting
probabilistic filteringto guarantee good global properties.
IV. TEST-BED CONFIGURATION
We need to benchmark the different algorithms in a knownand
reproducible scenario. To achieve this goal, we runexperiments in a
possibly complex, but fully controlled net-work to avoid
fluctuations and randomness due to externalimpairments. The
test-bed is built in laboratories available atPolitecnico di
Torino, with 204 PCs divided in four differentsubnets. Table I
shows the number of PCs in each subnet. Weused tc, the standard
Linux Traffic Controller tool, togetherwith the netem option to
enforce delay and packet droppingprobability when needed. Each peer
selects an average delayE[RTT ] in the tuples detailed in Table II.
Then, each packetwill be delayed according to a uniform
distribution [E[RTT ]0.95;E[RTT ] 1.05]. The upload bandwidth is
limited bythe application itself, exploiting the feature of a
simple leakybucket (with a memory of 10 Mbytes) to limit the
applicationdata rate to a given desired value. Peer upload
capacities Cpare shown in Table III. Configurations in Tables II
and III havebeen designed to resemble a world-wide geographic
scenario,where peers are distributed over continents (clusters),
and theyrely on different kinds of access technologies, i.e.,
ADSLor FTTH interfaces, that provide different up-link
capacity.
8OFF can be however affected by other system parameters such as
NI andby the system load conditions
Table IIICHARACTERISTICS OF PEER CLASSES.
Class Upload Bandwidth Percentage of Peers1 5 Mb/s 10% 10 %2 1.6
Mb/s 10% 35 %3 0.64 Mb/s 10% 35 %4 0.2 Mb/s, 10% 20 %
Those configurations are not meant to be representative ofany
actual case, but rather they are instrumental to createbenchmarking
scenarios with different properties. Each PCruns 5 independent
instances of PeerStreamer simultaneously,thus, a swarm of 1020
peers is built in every experiment, ifnot otherwise stated. The
source peer runs at an independentserver (not belonging to any of
the subnets). It injects in theswarm 5 copies of each newly
generated chunk, correspondingto roughly 6 Mbit/s.
The well known Pink of the Aerosmith video sequencehas been used
as benchmark. The nominal sequence lengthcorresponds to 200s, with
a time resolution equal to 25frame/s. The sequence is looped for a
total stream durationof about 20min. After the initial 12min of
experiment, eachpeer starts saving on local disk a 3min long video
that we useto compute QoE metrics.
We selected the H.264/AVC codec to encode the videosequence. A
hierarchical type-B frames prediction scheme hasbeen used,
obtaining 4 different kinds of frames that, in orderof importance,
are: IDR, P, B and b. The GOP structure isIDR8 {P,B,b,b}. The
nominal video rate of the encoder rsis 1.2Mbit/s if not otherwise
specified. This corresponds toa system load = 0.9 defined as =
rs/E[Cp] whereE[Cp] = 1.32Mbit/s is the average upload bandwidth of
peers.
The source node generates a new chunk regularly every40ms, i.e.,
every new frame. The chunk size is instead highlyvariable due to
the encoded video characteristics. Each peerimplements a chunk
buffer of 150 chunks. Given the one-frameone-chunk mapping, and 25
frame/s of the video, thiscorresponds to a buffer of 6 s, i.e., the
play-out deadline isonly 6 s.
All figures in this paper report average results considering10
different runs of 15 minutes each.
A. Network Scenarios
The generic setup described above is used as a base for
threedifferent scenarios to evaluate significant situations. The
firstscenario, G Homo hereafter, is geographically homogeneous:the
distribution of the peers of different Cp classes is thesame in any
area, so that there is the same distribution ofbandwidth
everywhere. This scenario is useful to understandthe fundamental
behavior of different neighborhood filteringstrategies.
The second scenario, G Bias hereafter, assumes that band-width
rich peers (Class 1) are all concentrated in a singlesubnet. This
situation is particularly challenging for a topologymanagement
system that tries to localize traffic to reduce thenetwork
footprint of the application.
The third scenario, G Lossy hereafter, is again geograph-ically
homogeneous, but the long-haul connections between
-
6 0
1
2
3
Add RND Add BW Add OFF Add RTT
Lost
Chu
nks
%Drop RNDDrop RXCDrop RTT
0
2
4
6
8
10
Add RND Add BW Add OFF Add RTT
Pee
rs o
ver 1
% L
osse
s % Drop RND
Drop RXCDrop RTT
0
1
2
3
Add RND Add BW Add OFF Add RTT
Pee
rs o
ver 3
% L
osse
s % Drop RND
Drop RXCDrop RTT
Figure 2. Frame loss for different strategies in G Homo
scenario: Floss (average) (left), percentage of peers whose
Floss(p) > 0.01 (center), percentage ofpeers whose Floss(p) >
0.03 (right).
the subnets 13, 14, 23, 24 are subject to packet losswith
probability p = 0.05, while the intra-subnet links andthe links
between 12 and 34 are lossless. This situation isuseful to
understand if black-listing can really help in buildingbetter
topologies, or if its use should be limited to isolatemisbehaving
and malicious nodes.
The fourth and final scenario, G Adver hereafter,
combinestogether G Bias and G Lossy in such a way that large
band-width peers are amassed in the subnet 1, while the four
subnetsexperience the same packet loss configuration on
long-haullinks described above. This case, even if adverse,
represents aninteresting challenge for those strategies that seek
the tradeoffbetween location and bandwidth awareness, and it is
useful todetect possible conflicts with the black-listing
functionality.
Finally, churning of peers is modeled: a fraction Pnochof peers
never leaves the system, while Pch = 1 Pnochchurning peers have a
permanence time uniformly distributedbetween 4 and 12min. To keep
the number of peers constant,once a churning peer has left the
system, it will be off foran average time equal to 30 sec before
re-joining the swarm(with a different ID, i.e., as a new peer).
B. Performance Indices
To assess the QoE for each peer p, we consider the frameloss
probability, Floss(p), and the SSIM (Structural SimilarityIndex),
Sssim(p), a well-known method for measuring thesimilarity between
two images in the multimedia field [12].Given the highly structured
organization of the video streams,the degradation of the received
video quality becomes typicallynoticeable for values of Floss(p)
higher than 1%, while lossprobability of a few percent (3-4%)
significantly impair theQoE. In the following, we report both
average frame loss,Floss = Ep[Floss(p)], and the percentage of
peers that sufferFloss(p) larger than 1% and 3%, respectively.
Performance however should also take into account the costfor
the network to support the application. As network cost we consider
the average of the distance traveled by informationunits. Formally,
let bq(p) the number of bits peer p receivedfrom peer q; the peer p
network cost (p) is computed as
(p) =
q RTTq(p)bq(p)
q bq(p)(4)
while the average network cost is = Ep[(p)]. This isstrictly
valid only if all peers receive the same amount ofdata, i.e., if
the streaming is working correctly, otherwise theaverage network
cost should be weighted by the amount ofdata received by each peer.
As peers that receive less than,say, 95% of the stream would have
unacceptable quality and
hence leave the system, this further refinement of the metricis
not necessary.
V. CONTROLLED ENVIRONMENT EXPERIMENTSA. G Homo Scenario
We start considering the case in which the distribution ofCp is
geographically homogeneous.
The left-hand plot in Fig. 2 shows the average frame
lossprobability experienced by different policies, while center
andright-hand plots report the percentages of peers that
experi-enced Floss(p) > 0.01 and Floss(p) > 0.03,
respectively.
RND-RND is the reference, and we immediately observethat the
other algorithms modify the loss distribution, i.e.,they can have a
different impact on different percentiles. Forinstance BW-RTT
improves the average loss rate and thepercentage of peers with
Floss(p) > 0.01, but at the expenseof the percentage of peers
with bad quality (Floss(p) > 0.03),while RTT-RTT improves the
number of peers with Floss(p) >0.01, but both the average and
the percentage of peers withbad quality (Floss(p) > 0.03) are
worse.
In general, the use of policies sensitive to peer bandwidth(BW
and OFF for adding and RXC for dropping) appear tobe more effective
in reducing losses. However the behaviorof BW-RXC, for which Floss
tops at 2.5%, indicates thatusing a single metric for selecting the
neighborhood can bedangerous. BW-RXC biases too much the choice
toward highbandwidth peers, which become congested and are not able
tosustain the demand. To better grasp these effects, Fig. 4
reportsthe smoothed9 histogram of the out-degree NO(p). NO(p)
ofpeers belonging to different classes is significantly different
aslong as bandwidth aware policies are adopted; out-degrees
areinstead independent for RND-RND as expected. It would
bedesirable to have an out-degree of a peer proportional to
itsup-link bandwidth. This is roughly achieved by adopting BW-RND
policy. Under BW-RXC, instead, the degree distributiondepends too
much on Cp. As a result, high bandwidth peerstends to be
oversubscribed while medium and low bandwidthpeers may be
underutilized. Measures of the bandwidth uti-lization, not shown
for lack of space, show that all bandwidthaware policies select an
out-degree that completely saturatesthe available bandwidth, so
that the out-degree distribution isa good indicator of over
subscriptions.
Policies sensitive to RTT perform well in the
consideredscenario, with the exception of RTT-RTT, which is too
aggres-sive in strictly selecting the closest in-neighbors. Indeed,
as
9The distribution of NO(p) inside classes is binomial as
expected fromtheory. This distribution results in a large noisiness
of the plot, so we applya smoothing window of length 30 in
plotting, basically showing the averageNO in each class.
-
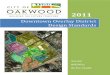
7Figure 3. Topology representations and N0 PDFs for RND-RND,
RND-RXC, RTT-RXC and BW-RXC policies, G Homo scenario.
0
20
40
60
80
100
120
140
0 200 400 600 800 1000
Out
Deg
ree
Peer
Class 4 Class 3 Class 2 Class 1
BW - RXCBW - RND
RND - RXCRND - RND
Figure 4. Out-degree distribution of peers, G Homo scenario.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1
0 50 100 150 200
CD
F
Network Cost [ms]
RTT - RTTRND - RTTRTT - RXCRND - RXCBW - RND
RND - RND
Figure 5. CDF of the distance traveled by information units, G
Homoscenario.
Table IVTOPOLOGY STATISTICS VS. POLICY IN G Homo SCENARIO.
Edges E[NO] Frac. of ChordsRND - RND 29052 29.46 0.74RND - RXC
29058 29.93 0.73RTT - RXC 29550 29.97 0.30BW - RXC 29550 29.97
0.70
observed in [5], policies that force a too strict traffic
localiza-tion induce performance degradations due to poor
topologicalproperties of the swarm. To complement previous
informationFig. 5 reports the Cumulative Distribution Function
(CDF) ofnetwork cost (p). As expected, RTT aware policies
signif-icantly reduce this index thanks to their ability to select
in-
neighbors within the same area.The observations above are
confirmed by Fig. 3 and Tab. IV.
The former reports a graphical representation of the
overlaytopology, coupled with the PDF of NO, for several
policieswhen considering G Homo scenario. Peers, grouped in
clus-ters as described in Tab. I and Tab. II, are represented
bydots whose size is proportional to their out-going degree.Color
as well has been made lighter for larger values of NO.This
graphical representation easily shows that: i) schemes
notimplementing any location-aware policy show a larger fractionof
chords, i.e., edges connecting peers belonging to differentclusters
(Tab. IV details the actual graph characteristics);and ii) BW-RXC
scheme biases the choice towards largebandwidth peers, possibly
overloading them.
Remark A As a first consideration, we can say that:i) bandwidth
aware policies improve the application per-formance; ii) RTT aware
policies reduce the network costwithout endangering significantly
the video quality if appliedto add peers; when used to drop peers,
however, RTT posessignificant bias impairing QoE; iii) the
preference toward highbandwidth peers/nearby peers must be tempered
to achievegood performance. The policy RTT-RXC improves qualityand
reduces the network cost at the same time, offering thebest
trade-off in this scenario. Interestingly, this policy is alsoeasy
to be implemented, since it requires to measure simpleand
straightforward metrics. In general, bandwidth aware addschemes
offer better QoE performance, at the cost of morecumbersome
available capacity estimation. However, the RXCdrop filter measures
the ability of the parent peer to offer usefulchunks as seen by the
child peer. This is easy to measure aposteriori, after having
tested a peer as a parent.
B. G Homo with Smaller NIWe consider the same network scenario
but we set NI = 20.
This is a more critical situation where choosing the good
in-neighbors is more important. The value of NI is related withthe
signaling overhead which increases with NI , so havingsmall
neighborhood is desirable. However, a too small NIwould impair the
availability of chunks.
-
8 0 1 2 3 4 5 6 7 8
Add RND Add BW Add OFF Add RTT
Lost
Chu
nks
%Drop RNDDrop RXCDrop RTT
0
2
4
6
8
10
Add RND Add BW Add OFF Add RTT
Pee
rs o
ver 1
% L
osse
s % Drop RND
Drop RXCDrop RTT
0
2
4
6
8
10
Add RND Add BW Add OFF Add RTT
Pee
rs o
ver 3
% L
osse
s % Drop RND
Drop RXCDrop RTT
Figure 6. Frame loss for different strategies in G Homo scenario
with NI = 20: Floss (average) (left), percentage of peers whose
Floss(p) > 0.01 (center),percentage of peers whose Floss(p) >
0.03 (right).
0
0.2
0.4
0.6
0.8
1
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14
CD
F
Chunk Loss Probability
BW - RNDRND - RXCRTT - RXCRND - RND
BW - RTTRND - RTTRTT - RTT
Figure 7. CDF of the frame loss probability for four different
strategies,G Bias scenario.
Results are plotted in Fig. 6 (the y-scales in Figs. 2 and 6
aredifferent for readability reasons, and this is the reason why
atfirst sight some policies seem to perform better with a smallerNI
). The performance of RND-RND significantly degrades inthis case.
The reason is that the out degree of Class 1 peersunder RND-RND is
often not enough to fully exploit theirbandwidth. Bandwidth aware
strategies, instead, successfullyadapt NO(p) to Cp maintaining high
performance. Also RTT-RND and RTT-RTT, which are bandwidth unaware,
performbetter than RND-RND, since RTT-aware selection
policiesreduce the latency between an offer and the actual
chunktransmission that follows it, helping in exploiting the
peersbandwidth. Results for network cost are similar to those
inFig. 5 and are not reported for the sake of brevity.
Remark B Random selection policies, which are widelyemployed by
the community [20], are robust, but performpoorly if the number of
peers in the neighborhood is small: allpeers suffer 8% of frame
loss, practically making it impossibleto decode the video. As
already seen with NI = 30, the policythat combines bandwidth and
RTT awarenesses (RTT-RXC)improves both performance and network
costs. Similarly,wisely selecting high-capacity in-neighbors is
vital, as testifiedby the excellent performance of add BW
policies.
C. G Bias Scenario
Maintaining unchanged the Cp distribution, we localize allhigh
bandwidth peers in geographical area 1. This scenario,in principle,
constitutes a challenge for the policies that tryto localize
traffic. Indeed as side effect of the localization wecan
potentially have a riches with riches, poors with
poorsclusterization effect that may endanger the video
qualityperceived by peers in geographical regions other than 1.
Fig. 7 reports the CDF of Floss(p) for the strategies
per-forming better in the G Homo scenario, plus the benchmark
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1
0 50 100 150 200
CD
F
Network Cost [ms]
RTT - RTTRND - RTTBW - RTT
RTT - RXCRND - RXCRND - RNDBW - RND
Figure 8. CDF of distance traveled by information units, G Bias
scenario.
Table VAVERAGE FRACTIONS OF INCOMING TRAFFIC FOR CLUSTER 2.
1 - good 2 - local 3 - bad 4 - bad + farRND - RND w/o BL 0.23
0.32 0.28 0.15RND - RND w BL 0.28 0.34 0.24 0.12BW - RND w/o BL
0.22 0.35 0.27 0.14BW - RND w BL 0.23 0.36 0.24 0.13
RTT - RXC w/o BL 0.12 0.68 0.11 0.07RTT - RXC w BL 0.13 0.70
0.09 0.05
RND-RND. In this case if RTT is the only metric usedas in
RTT-RTT, the performance degrades unacceptably, andpeers in area 1
are in practice the only one receiving agood service. In general,
any policies based on drop RTTperform poorly. Strategies RTT-RXC,
RND-RXC and BW-RND perform similarly; however, the only policy that
can alsoreduce the network cost is RTT-RXC, as shown in Fig. 8
thatreports the CDF of (p).
Remark C This result essentially proves that also inG Bias
scenario it is possible to partially localize the trafficwithout
endangering the video quality perceived by the user, aslong as RTT
awareness is tempered with some light bandwidthawareness, as in
RTT-RXC. Interestingly, the RTT drivenpolicies perform much better
if the RTT is used to addpeers rather than to drop peers. Indeed,
in this latter case,aggressively dropping far away, but high
capacity, in-neighborspenalizes peers which are located in areas
where little highcapacity peers can be found.
D. G Lossy Scenario
We consider another scenario in which large bandwidthpeers are
uniformly distributed over the four subnets, butpacket losses are
present in some long haul connections.
Fig 9 plots the CDF of frame losses (top) and the CDFof chunks
delivery delays (bottom) for the selected policies.Blacklisting
improves the performance of every policy. RTT-RXC emerges again as
the best performing policy and with
-
9 0
0.2
0.4
0.6
0.8
1
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14
CD
F
Chunk Loss Probability
RTT - RXC w BLRTT - RXC w/o BL
BW - RND w BLBW - RND w/o BLRND - RND w BL
RND - RND w/o BL
0
0.2
0.4
0.6
0.8
1
0 0.5 1 1.5 2
CD
F
Chunk Delivery Delay [s]
RTT - RXC w BLRTT - RXC w/o BL
BW - RND w BLBW - RND w/o BLRND - RND w BL
RND - RND w/o BL
Figure 9. CDF of chunk loss probability (top) and CDF of chunk
deliverydelays (bottom) for six different strategies with and
without adopting blacklistmechanism in G Lossy scenario.
blacklisting practically all peers are able to receive all
chunks.This is an excellent result, since the system is facing a
verychallenging scenario while working with a load of 0.9.
Benefits of the blacklisting mechanism are confirmed byTable V
that reports the normalized volume of incoming trafficfor peers in
cluster 2 from peers in all clusters. Keeping inmind that in G
Lossy scenario peers belonging to cluster 2experience lossy paths
from/towards peers in cluster 3 and4 (as explained in Sec. IV), it
is easy to see that volumes ofincoming traffic from cluster 3 and 4
are nicely reduced thanksto blacklisting mechanism.
Remark D Blacklisting can play a significant role toavoid
selecting lossy paths. Indeed, exploiting the blacklistmechanism
every peer should identify and abandon poorlyperforming peers,
biasing the neighborhood toward goodperforming in-neighbors. This
effect reinforces policies thatnaturally bias the selection of
neighbor peers employing peerquality. RND-RND, BW-RND and RTT-RXC
have emergedas the most promising criteria (RND-RND being the
baselinebenchmark). RTT-RXC with blacklisting is shown to
guar-antee excellent performance to all peers even in this
almostadversarial scenario.
E. G Adver Scenario
Fig. 10 plots the CDF of frame losses for different poli-cies in
G Adver scenario when the system load = 0.9.Policies which showed
best performance in G Lossy whereconsidered. Comparing Fig. 10 with
Figs. 7 and 9 (top plot),it is immediately evident how combining
together G Bias andG Lossy configurations has a negative impact on
performance.However, even in this difficult context, RTT-RXC
policiesstill shows the lowest chunk loss probability, confirming
tobe the best choice. As seen in Sec. V-D, also in this case
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
CD
F
Chunk Loss Probability
RTT - RXC w BLRTT - RXC w/o BL
BW - RND w BLBW - RND w/o BLRND - RND w BL
RND - RND w/o BL
Figure 10. CDF of chunk loss probability for six different
strategies with andwithout adopting blacklist mechanism in G Adver
scenario.
blacklisting improves the performance, especially of
thosefiltering strategies which do not exploit
location-awareness,such as RND-RND and BW-RND. This instead does
nothold completely for RTT-RXC, and induce to think that
thetradeoff between location and bandwidth awareness is enoughto
provide acceptable performance in this challenging scenario.Indeed,
given the peculiar configuration of G Lossy, choosingin-neighbors
based on their location represents a sufficientcriterion to avoid
lossy links, so that blacklisting does notbring any further
benefit.
Remark E Blacklisting confirms to be in general a usefulhelp in
the filtering process, letting peers drop lossy connec-tions,
especially when no location-based filtering strategy isadopted.
VI. VIDEO PERFORMANCE EVALUATION
A. Video performance versus load
We now summarize the results by aessessing the actualaverage QoE
by reporting Sssim for different policies anddifferent system
loads. We consider G Lossy and G Adverscenarios, and let rs range
from 0.6 Mb/s to 1.4 Mb/s. Recallthat the mean peer capacity E[Cp]
= 1.324 Mb/s.
Fig. 11 shows the average Sssim considering RND-RND,BW-RND and
RTT-RXC with and without blacklisting. SSIMmeasures the distortion
of the received image compared withthe original source (before
encoding and chunkization). Itis a highly non linear metric between
1 and 1. Negativevalues correspond to negative images, and are not
considered.Values above 0.985 indicates excellent quality. SSIM
hasbeen computed considering the video between min 12 and13 (60x25
frames) received by 200 peers (50 for each class),and then
averaging among all of them. The EVQ (EncodedVideo Quality) curve
in the plot is the reference value forthe encoding rate and it
obviously increases steadily as rsincreases. For all policies, when
the system load is small
-
10
0.9 0.91 0.92 0.93 0.94 0.95 0.96 0.97 0.98 0.99
1
0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4
SS
IM
rs [Mbps]
=1.0
EVQRTT - RXC w BL
RTT - RXC w/o BLBW - RND w BL
BW - RND w/o BLRND - RND w BL
RND - RND w/o BL
Figure 11. Sssim (average) index varying the video rate. G Lossy
scenario.
0.5
0.6
0.7
0.8
0.9
1
0.6 0.7 0.8 0.9 1 1.1 1.2 1.3
SS
IM
rs [Mbps]
=0.9
EVQRTT - RXC w BL
RTT - RXC w/o BLBW - RND w BL
BW - RND w/o BLRND - RND w BL
RND - RND w/o BL
Figure 12. Sssim (average) index varying the video rate. G Adver
scenario.
Similarly, Fig. 12 shows the average Sssim consideringRND-RND,
BW-RND and RTT-RXC in the G Adver scenario,both with and without
blacklisting functionality. As expected,the adversarial scenario
makes it more challenging to achieve agood QoE, even for 0.75.
B. Scaling with swarm size
Considering again G Homo scenario, we study how thesystem scales
when increasing the swarm size N from 200to 2000 peers. Due to the
lack of space, we only report inTable VI the average Sssim for the
RND-RND and RTT-RXCschemes. The video is encoded at rs = 1.2 Mb/s,
i.e., systemload = 0.9. The simple bandwidth-aware scheme, RTT-RXC,
always ensures better performance than RND-RND, i.e.,the average
Sssim improves from 0.8 to 0.99, a remarkablegain. Increasing N has
a negligible impact on performance,especially when the smart
RTT-RXC policy is adopted.
C. Sensitivity to NI and Update Rate with Churning andFlash
Crowd
Consider a G Homo scenario with Pchurn fraction of peersthat
join and leave the swarm. We investigate what are the besttrade-off
values for the size of the incoming neighborhood NIand its update
frequency Rup, as defined in (2).
Table VIAVERAGE Sssim VERSUS N . G Homo SCENARIO, rs = 1.2
MB/S.
N 204 612 1040 1428 1836 2080RND - RND 0.858 0.812 0.829 0.783
0.799 0.799RTT - RXC 0.984 0.981 0.988 0.979 0.988 0.991
0.8
0.85
0.9
0.95
1
10 20 30 40 50 60 70 80
SS
IM
In-Degree
Pchurn = 0.50
RTT-RXCRND-RND
Figure 13. Average Sssim vs NI with Pchurn = 0.5. Schemes
RND-RNDand RTT-RXC in G Homo scenario with 1000 peers and rs = 1.0
Mb/s.
0
0.1
0.2
0.3
0.4
0.5
400 420 440 460 480 500 520
Loss
Rat
e
Time [s]
RND-RND, NI = 30BW-RXC, NI = 30
RND-RXC, NI = 30RTT-RXC, NI = 30RTT-RXC, NI = 5
Figure 14. Average loss rate vs time before, during and after a
flash crowdevent. G Homo scenario with 1000 peers and rs = 1.0
Mb/s.
Fig. 13 reports Sssim (computed and averaged over peersthat
never leave the system) varying the size of the
incomingneighborhood NI . In particular, we set Fup = 0.3, Tup =
10and change NI [5, 80]. For this case we consider RND-RND and
RTT-RXC schemes in G Homo scenario with rs =1.0 Mb/s and a fraction
of churning peers Pchurn = 0.5.First, observe that both schemes
show good performance forwhatever value of NI [25, 45]. Indeed, a
too small incomingneighborhood, e.g. NI = 5, is not enough to
guarantee thepeers to find a good and stable set of in-neighbors
from whichto download chunks; on the other hand setting too large
valuesof NI leads to a larger overhead and, thus, to a worse
percievedQoE, especially for the case in which no location-aware
policyis employed (see RND-RND when NI = 80).
We go further in our investigation and consider a flashcrowd
scenario derived from G Homo. The experiment startswith only half
of the peers, i.e., all peers in subnets 1and 2. The other half of
the peers, belonging to subnets 3and 4, join the system abruptly
all together after 7 min ofexperiment generating a flash crowd
event. Fig. 14 reportsthe chunk loss rate (computed and averaged
over peers thatnever leave the system) for different policies and
different sizesof the incoming neighborhood NI . In particular, we
considerRND-RND, BW-RND, RND-RXC and RTT-RXC schemes in
-
11
0.7
0.75
0.8
0.85
0.9
0.95
1
0.125 0.25 0.5 1 2 4
SS
IM
Rup
Pchurn=0.0Pchurn=0.25Pchurn=0.50Pchurn=0.75
Figure 15. Average Sssim vs Rup for different Pchurn. Scheme
RTT-RXCin G Homo scenario with 1000 peers and rs = 0.8 Mb/s.
0
20
40
60
80
100
0 100 200 300 400 500 600 700 800 900
Out
-Nei
ghbo
rood
siz
e
Time [s]
Rup=2 peer/sRup=1 peer/s
Rup=0.5 peer/sRup=0.2 peer/s
Figure 16. The evolution during time of the average outgoing
neighborhoodsize setting different Rup values. Scheme RTT-RXC in G
Homo scenariowith rs = 1.0 Mb/s.
G Homo scenario with rs = 1.0 Mb/s. Observe that given
areasonable size of the in-neighbors set, i.e., when NI = 30,all
considered schemes nicely react to the sudden ingress of500 peers.
Indeed, in all cases, the swarm takes only 30s toget back to a
stable regime. Instead when NI = 5, the systemtakes a longer time
to stabilize.
Fig. 15 reports the Sssim (computed and averaged overpeers that
never leave the system) varying the rate of updateRup. We set NI =
30, Fup = 0.3 and change Tup [2, 100] saccordingly. For this case
we adopted scheme RTT-RXC andrs = 0.8 Mb/s. The plot shows that the
system is very robust todifferent Rup values. Only under stressed
scenarios, such as forPchurn >= 0.5, Rup becomes critical: too
high Rup does notlet the swarm achieve a stable state, impairing
performance.On the other hand, too low Rup induces peers to react
slowlyto sudden changes brought by churning peers.
We now consider the G Homo scenario again, and forceall
high-bandwidth peers to experience an abrupt up-linkbandwidth
reduction from 5 Mbit/s to 0.64 Mbit/s (on average)at time 480 s.
This scenario is rather artificial, but it allowsquantifying the
reactivity of the topology to such abruptchanges. We consider the
RTT-RXC scheme. Fig. 16 reportsthe evolution over time of the
average size of the outgoingneighborhood NO of class 1 peers.
Different values of in-neighborhood update rate Rup are considered.
Two observa-tions hold: first, smaller values of Rup slow down the
systemreactivity; second, too large values, e.g., Rup = 2
peer/s,impair the performance as well, as peers do not have
enoughtime to collect significant measurements about the
in-neighborquality (amount of received chunks), and thus find it
difficult
Table VIICHARACTERISTICS OF PEER CLASSES IN THE PLANETLAB
EXPERIMENT.
Class Upload Bandwidth Percentage of Peers1 2.00 Mb/s 10% 50 %2
0.64 Mb/s 10% 50 %
0.8
0.85
0.9
0.95
0 0.2 0.4 0.6 0.8 1
SS
IM
Rank
rs = 0.8
RTT - RXCBW - RXC
RTT - RNDRND - RND
0.8
0.85
0.9
0.95
0 0.2 0.4 0.6 0.8 1
SS
IM
Rank
rs = 1.0
RTT - RXCBW - RXC
RTT - RNDRND - RND
Figure 17. Sssim(p) for rs = 0.8 Mb/s and rs = 1.0 Mb/s for
PlanetLabexperiments.
0.8 0.82 0.84 0.86 0.88
0.9 0.92 0.94 0.96 0.98
1
0.8 0.85 0.9 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3
SS
IM
rs [Mbps]
=0.9
RTT - RXCBW - RXC
RTT - RNDRND - RND
Figure 18. Sssim (average) index when varying video rate for
PlanetLabexperiments.
to distinguish good from bad in-neighbors. Also in thiscase Rup
= 1 peer/s setup represents a good trade off.
Remark G Fast topology updates allow the overlaytopology i) to
react quickly to changes in the network scenario;and ii) to prune
quickly peers which left the system, e.g., inheavy churning
conditions. However, too fast updates intro-duce instability in the
overlay construction process, drivingpeers to never achieve a
stable incoming neighborhood, andthus leading to bad system
performance. The best trade-offvalue is Rup = 1 peer/s, i.e., Tup =
10 s.
VII. PLANETLAB EXPERIMENTS
We now present similar experiments on PlanetLab. Weselected all
active PlanetLab nodes, excluding those that had
-
12
configuration issues or severe reachability problems. As
aresult, we obtained a set of 449 nodes scattered worldwide.No
artificial latency or packet loss were imposed, so that
con-nections among these nodes reflect natural Internet
conditions.
In order to achieve a scenario similar to the experimentsof the
previous section, peer upload capacity has been limitedby the
PeerStreamer embedded rate limiter. Observe that thisonly
guarantees an upper bound to the actual available peerupload
bandwidth which may be smaller due to competingexperiments running
on the same PlanetLab node or due toother bottlenecks on the access
links of the node. For thisreason, contrary to previous
experiments, we did not use a5 Mbit/s class, and restricted the
scenario to two classes asshown in Table VII: half of the peers
have 2 Mbit/s at their up-link, and 0.64 Mbit/s the other half.
Average upload capacityresults to have an upper bound of 1.32
Mbit/s, but the actualvalue largely depends on the status of
PlanetLab nodes andtheir network connection. Blacklisting was
active by defaultfor these experiments.
Fig. 17 reports each peers individual SSIM performance,Sssim(p),
for rs = 0.8 Mbit/s (top) and rs = 1.0 Mbit/s(bottom). Sssim(p) has
been sorted in decreasing values toease visualization. Each curve
represents the average of 10different runs. Observe that when the
amount of system re-sources is large enough with respect to the
video-rate, i.e, whenrs = 0.8 Mbit/s (top plot), different schemes
for topologymanagement perform rather similarly. Observe, however,
thatthere is always a certain fraction of nodes that cannot
receivethe video due to congestion at local resources.
Increasing system load, i.e., rs = 1.0 Mbit/s (bottom
plot),highlights differences among schemes and confirms
resultsobtained in the controlled environment: random-based
policies(RND-RND) perform badly in general; the same holds
forschemes based on pure proximity that can lead to
disconnectedtopologies and, then, to bad QoE performance (RTT-RND).
Infact, the right side of the RTT-RND curve shows that a groupof
peers (with rank around 0.8) received the video with lowerquality
than other peers.
A pure bandwidth based policy (BW-RXC) provides goodperformance,
delivering the video in good quality to morepeers than the previous
two policies. However, the bestquality (the highest portion of
peers receiving good quality)is achieved combining
bandwidth-awareness with proximity-based schemes (RTT-RXC). Thus,
this last policy achieves thegoal of localizing traffic without
impairing performance.
Results depicted in Fig. 17 are confirmed in Fig. 18 thatshows
the average Sssim as a function of video-rate rs, andthus system
load , for the same four policies (RND-RND,RTT-RND, BW-RXC,
RTT-RXC). Again RTT-RXC proves tobe the most reliable choice,
consistently outperforming otherpolicies for each value of rs.
Fig. 19 complements the information about users
perceivedperformance with statistics about network cost reporting
theCumulative Distribution Function (CDF) of network cost (p)given
a system load equal to 0.75 (rs = 1.0 Mbit/s). Oncemore, RTT aware
policies significantly reduce (p) thanksto their ability to select
closer in-neighbors, thus producinga lighter footprint on network
resources. Observe that when
0
0.2
0.4
0.6
0.8
1
0 50 100 150 200 250 300 350 400
CD
F
RTT [ms]
RTT-RNDRTT-RXCBW-RXC
RND-RND
Figure 19. CDF of the distance traveled by information units.
PlanetLabexperiments.
RTT sensitive policies are adopted, more than 55% of datais
exchanged with peers with less than 50 ms RTT. When nolocation
awareness is enabled, this fraction reduces to less than30%,
increasing both network cost and chunk delivery times.
Although RTT-RXC is only second best in terms of networkcost the
difference is marginal, and it is the only policythat can combine
good performance with low network costs,confirming again to be the
best choice to adopt.
VIII. RELATED WORK
Many popular commercial applications such as PPLive [23],UUSee
[24], PPStream [25], SopCast [26] were proposed inrecent years, but
almost no information about their internalimplementation is
available, making any statement about theiroverlay topology design
strategies impossible.
Only a few recent measurement studies suggest that simplerandom
based policies are adopted by SopCast [20], andsome slight
locality-awareness is implemented in PPlive [27].Focusing on
available literature on purely mesh-based P2P-TVsystems, many
solutions can be found, but also in this case, tothe best of our
knowledge, none of them provides general anddetailed guidelines for
the overlay topology design process.
An early solution called GnuStream was presented in [28].Based
on Gnutella overlay, GnuStream implemented a loaddistribution
mechanism where peers were expected to con-tribute to chunks
dissemination in a way proportional to theircurrent capabilities. A
more refined solution called PROMISEwas introduced in [29]. Authors
proposed an improved seederchoice based on network tomography
techniques; peers wereinterconnected through Pastry overlay
topology which imple-ments as many others P2P substrates like Chord
[30] or CANsome location awareness based on number of IP hops.
DONet(or Coolstreaming) [2] is a successful P2P-TV system
im-plementation. This design employs a scheduling policy basedon
chunk rarity and available bandwidth of peers, but its data-driven
overlay topology does not exploit any information fromunderlying
network levels. Many new features were introducedin [31] to improve
the streaming service and, in particular,authors proposed a new
neighbor re-selection heuristic basedonly on peers up-link
bandwidth. In [32], authors showed thedesign aspects of their
application called AnySee. Even if par-tially based on multicast,
this hybrid mesh-based system relieson an overlay topology that
aims at matching the underlyingphysical network while pruning slow
logical connections.
-
13
However, no deep investigation about performance of theiroverlay
design strategy is provided. In [33] authors presenteda study about
some key design issues related to mesh-basedP2P-TV systems. They
focused on understanding the reallimitations of this kind of
applications and presented a systembased on a directed and randomly
generated overlay. Somefundamental improvements were introduced:
e.g., the degreeof peers made proportional to their available
bandwidth.
Turning our attention on more theoretical studies about
theoverlay topology formation, in [3] the problem of building
anefficient overlay topology, taking into account both latency
andbandwidth, has been formulated as an optimization
problem;however, the interactions between overlay topology
structureand the chunk distribution process are ignored.
In [34] a theoretical investigation on optimal topologies
isformulated, considering latency and peer bandwidth
hetero-geneity; scaling laws are thus discussed. In [4], a
distributedand adaptive algorithm for the optimization of the
overlaytopology in heterogeneous environments has been proposed,but
network latencies are still ignored. Authors of [35] proposea
mechanism to build a tree structure on which informationis pushed.
They show that good topological properties areguaranteed by
location awareness schemes. Similar in spirit,but in unstructured
systems, we propose in this paper anoverlay topology design
strategy that, taking into accountlatency and peer heterogeneity,
aims at creating an overlaywith good properties and low chunk
delivery delays. In highlyidealized scenarios, [36] shows with
simple stochastic modelsthat overlay topologies with small-world
properties are partic-ularly suitable for chunk distribution in
P2P-TV systems.
Finally, in [10], authors experimentally compare unstruc-tured
systems with multiple-tree based ones, showing thatformer systems
perform better in highly dynamic scenariosas well as in scenarios
with bandwidth limitations. Thisstrengthen our choice of exploring
topology managementpolicies for mesh-based streaming systems.
IX. CONCLUSIONS
P2P-TV systems are extremely complex, and the assessmentof their
performance through experiments has been rarelyundertaken. In
particular, the impact of different constructionand maintenance
strategies for the overlay topology is ofthe utmost importance, and
remains extremely difficult tostudy. The work presented in this
paper partially fills thisgap. PeerStreamer was developed within
the framework of theNAPA-WINE project. Its modularity and
flexibility allowedthe selection of arbitrary strategies for the
construction of theoverall topology. In a fully controlled
networking environment,we have run a large campaign of experiments
measuring theimpact of different filtering functions applied to the
man-agement of peer neighborhoods. Results show that
propermanagement, based on simple RTT measurements to addpeers,
coupled with an estimation of the quality of the peer-to-peer
relation to drop them, leads to a win-win situation wherethe
performance of the application is improved while thenetwork usage
is reduced compared to a classical benchmarkwith random peer
selection.
REFERENCES
[1] V. Pai, K. Kumar, K. Tamilmani, V. Sambamurthy, and A. E.
Mohr,Chainsaw: Eliminating trees from overlay multicast, in IPTPS,
Ithaca,NY, US, February 2005.
[2] X. Zhang, J. Liu, and T. Yum, Coolstreaming/donet: A
data-driven over-lay network for peer-to-peer live media streaming,
in IEEE INFOCOM,Miami, FL, US, March 2005.
[3] D. Ren, Y. T. H. Li, and S. H. G. Chan, On Reducing Mesh
Delay forPeer-to-Peer Live Streaming, in IEEE INFOCOM, Phoenix, AZ,
US,April 2008.
[4] R. Lobb, A. P. Couto da Silva, E. Leonardi, M. Mellia, and
M. Meo,Adaptive Overlay Topology for Mesh-Based P2P-TV Systems, in
ACMNOSSDAV, Williamsburg, VA, US, June 2009.
[5] A. Couto da Silva, E. Leonardi, M. Mellia, and M. Meo,
ChunkDistribution in Mesh-Based Large Scale P2P Streaming Systems:
a FluidApproach, IEEE Trans. on Parallel and Distributed Systems,
vol. 22,no. 3, pp. 451463, March 2011.
[6] X. Jin and Y.-K. Kwok, Network aware P2P multimedia
streaming:Capacity or locality? in IEEE P2P, Kyoto, JP, August
2011.
[7] Y. Liu, On the minimum delay peer-to-peer video streaming:
howrealtime can it be? in ACM Multimedia, Augsburg, DE,
September2007.
[8] T. Bonald, L. Massoulie, F. Mathieu, D. Perino, and A.
Twigg,Epidemic live streaming: optimal performance trade-offs. in
ACMSIGMETRICS, Annapolis, MD, US, June 2008.
[9] L. Abeni, C. Kiraly, and R. Lo Cigno, On the Optimal
Scheduling ofStreaming Applications in Unstructured Meshes, in IFIP
Networking,Aachen, DE, May 2009.
[10] J. Seibert, D. Zage, S. Fahmy, and C. Nita-Rotaru,
Experimental com-parison of peer-to-peer streaming overlays: An
application perspective,in IEEE LCN, Montreal, QC, CA, October
2008.
[11] F. Picconi and L. Massoulie, Is there a future for
mesh-based live videostreaming? in IEEE P2P, Aachen, DE, September
2008.
[12] Z. Wang, A. C. Bovik, H. R. Sheikh, and E. P. Simoncelli,
Imagequality assessment: From error visibility to structural
similarity, IEEETrans. on Image Processing, vol. 13, no. 4, pp.
600612, April 2004.
[13] S. Traverso, L. Abeni, R. Birke, C. Kiraly, E. Leonardi, R.
Lo Cigno,and M. Mellia, Experimental comparison of neighborhood
filteringstrategies in unstructured p2p-tv systems, in IEEE P2P,
Tarragona, ES,September 2012.
[14] NAPA-WINE. [Online]. Available:
http://www.napa-wine.eu/[15] R. Birke, E. Leonardi, M. Mellia, A.
Bakay, T. Szemethy, C. Kiraly,
R. Lo Cigno, F. Mathieu, L. Muscariello, S. Niccolini, J.
Seedorf, andG. Tropea, Architecture of a Network-Aware P2P-TV
Application: theNAPA-WINE Approach, IEEE Comm. Magazine, vol. 49,
June 2011.
[16] L. Abeni, C. Kiraly, A. Russo, M. Biazzini, and R. Lo
Cigno, Designand implementation of a generic library for P2P
streaming, in Workshopon Advanced Video Streaming Techniques for
Peer-to-Peer Networks andSocial Networking, Florence, IT, October
2010.
[17] R. Birke, C. Kiraly, E. Leonardi, M. Mellia, M. Meo, and S.
Traverso,A delay-based aggregate rate control for p2p streaming
systems,Computer Communications, vol. 35, no. 18, pp. 2237
2244,2012. [Online]. Available:
http://www.sciencedirect.com/science/article/pii/S0140366412002332
[18] N. Tolgyesi and M. Jelasity, Adaptive peer sampling with
newscast,in Euro-Par, Delft, NL, 2009.
[19] F. Chierichetti, S. Lattanzi, and A. Panconesi, Rumour
spreading andgraph conductance, in ACM-SIAM SODA, Austin, TX, US,
2010.
[20] I. Bermudez, M. Mellia, and M. Meo, Passive
characterization ofSopCast usage in residential isps, in IEEE P2P,
Kyoto, JP, August2011.
[21] R. Fortuna, E. Leonardi, M. Mellia, M. Meo, and S.
Traverso, QoE inPull Based P2P-TV Systems: Overlay Topology Design
Tradeoffs, inIEEE P2P, Delft, The Netherlands, August 2010.
[Online].
Available:http://www.telematica.polito.it/traverso/papers/p2p10.pdf
[22] F. Lehrieder, S. Oechsner, T. Hossfeld, Z. Despotovic, W.
Kellerer, andM. Michel, Can p2p-users benefit from
locality-awareness? in IEEEP2P, Delft, NL, August 2010.
[23] PPLive. [Online]. Available: http://www.pplive.com[24]
UUSee. [Online]. Available: http://www.uusee.com[25] PPStream.
[Online]. Available: http://www.ppstream.com[26] SOPCast. [Online].
Available: http://www.sopcast.com[27] L. Vu, I. Gupta, K.
Nahrstedt, and J. Liang, Understanding overlay
characteristics of a large-scale peer-to-peer iptv system, ACM
Trans.Multimedia Comput. Commun. Appl., vol. 6, no. 4, pp.
31:131:24, Nov.2010. [Online]. Available:
http://doi.acm.org/10.1145/1865106.1865115
-
14
[28] X. Jiang, Y. Dong, D. Xu, and B. Bhargava, Gnustream: a P2P
mediastreaming system prototype, in IEEE ICME, Washington, DC,
US,2003.
[29] M. Hefeeda, A. Habib, B. Botev, D. Xu, and B. Bhargava,
Promise:peer-to-peer media streaming using collectcast, in ACM
Multimedia,New York, NY, US, 2003.
[30] I. Stoica, R. Morris, D. Karger, M. F. Kaashoek, and H.
Balakrishnan,Chord: A scalable peer-to-peer lookup service for
internet applications,SIGCOMM Comput. Commun. Rev., vol. 31, pp.
149160, August 2001.
[31] B. Li, S. Xie, Y. Qu, G. Y. Keung, C. Lin, J. Liu, and X.
Zhang, In-side the new coolstreaming: Principles, measurements and
performanceimplications, in IEEE INFOCOM, Phoenix, AZ, US, April
2008.
[32] X. Liao, H. Jin, Y. Liu, L. M. Ni, and D. Deng, Anysee:
Peer-to-peerlive streaming, in IEEE INFOCOM, Barcelona, ES, April
2006.
[33] N. Magharei and R. Rejaie, Prime: Peer-to-peer
receiver-driven mesh-based streaming, in IEEE INFOCOM, Anchorage ,
AK, US, May 2007.
[34] T. Small, B. Liang, and B. Li, Scaling laws and tradeoffs
in Peer-to-Peer live multimedia streaming, in ACM Multimedia, Santa
Barbara,CA, US, October 2006.
[35] T. Locher, R. Meier, S. Schmid, and R. Wattenhofer,
Push-to-Pull Peer-to-Peer Live Streaming, in Distributed Computing,
ser. Lecture Notesin Computer Science, A. Pelc, Ed. Springer Berlin
/ Heidelberg, 2007,vol. 4731, pp. 388402.
[36] J. Chakareski, Topology construction and resource
allocation in p2plive streaming, in Intelligent Multimedia
Communication: Techniquesand Applications, ser. Studies in
Computational Intelligence. SpringerBerlin / Heidelberg, 2010, vol.
280, pp. 217251.
Stefano Traverso received his Ph.D. degree inNetworking
Engineering at Politecnico di Torino,Italy, in 2012. His research
interests include P2Pnetworks, streaming systems, overlay networks,
net-work measurements, and content delivery networks.During his
Ph.D. and Post-doc he has been visitingTelefonica I+D research
center in Barcelona, Spain,and NEC Laboratories in Heidelberg,
Germany. Heis currently a Post-doc Fellow of TNG group
ofPolitecnico di Torino.
Luca Abeni is assistant professor at DISI, Univer-sity of
Trento. He graduated in computer engineer-ing from the University
of Pisa in 1998, and re-ceived a Ph.D. degree at Scuola Superiore
S. Anna,Pisa in 2002. From 2003 to 2006, Luca workedin Broadsat
S.R.L., developing IPTV applicationsand audio/video streaming
solutions over wired andsatellite (DVB - MPE) networks. His main
researchinterests are real-time operating systems,
schedulingalgorithms, Quality of Service management, multi-media
applications, and audio/video streaming.
Robert Birke received his Ph.D. degree from thePolitecnico di
Torino in 2009 with the telecommu-nications group under the
supervision of professorFabio Neri. Currently he works as a postdoc
inthe system fabrics group at IBM Research ZurichLab. His main
research interests are peer-to-peer,high performance computing, and
datacenter net-works with special focus on performance, qualityof
service, and virtualization.
Csaba Kiraly , at the time of this work, was researchassociate
at DISI, University of Trento, Italy, as partof the Systems and
Networks group. He graduatedin Informatics and Telecommunications
from theBudapest University of Technology and Economicsin 2001, and
he received his Ph.D. from the sameuniversity. His main research
interests are in designand performance evaluation of overlay
networks,with particular focus on P2P streaming and
privacyenhancing technologies. Csaba Kiraly is member ofthe IEEE
and ACM. He is co-author of more than
30 scientific papers.
Emilio Leonardi (SM09) received a Dr. Ing. degreein Electronics
Engineering in 1991 and a Ph.D. inTelecommunications Engineering in
1995 both fromPolitecnico di Torino. He is an Associate Professorat
the Dipartimento di Elettronica of Politecnico diTorino. His
research interests are in the field of:performance evaluation of
computer and commu-nication networks, scheduling, queueing theory
andpacket switching.
Renato Lo Cigno (SM11) is Associate Professor atthe Department
of Computer Science and Telecom-munications (DISI) of the
University of Trento,Italy, where he leads a research group in
computerand communication networks. He received a degreein
Electronic Engineering with a specialization inTelecommunications
from Politecnico di Torino in1988, the same institution where he
worked until2002. From 1998 to 2006, he was with the
ComputerScience Department, University of California, LosAngeles,
as a Visiting Scholar for a total of 14
months. His current research interests are in performance
evaluation ofwired and wireless networks, modeling and simulation
techniques, congestioncontrol, P2P networks and networked systems
in general. Renato Lo Cignowas Area Editor for Computer Networks,
and is regularly involved inthe organizing and technical committees
of leading IEEE, ACM and IFIPConferences, such as Infocom,
Globecom, ICC, P2P, MSWiM, WONS. He issenior member of IEEE and
ACM.
Marco Mellia (SM08) is with the Dipartimentodi Elettronica e
Telecomunicazioni at Politecnicodi Torino as an Assistant
Professor. In 1997, hewas a Researcher supported by CSELT.
Duringhis Ph.D., he has been with the Computer Sci-ence Department
of Carnegie Mellon University. In2002 he visited the Sprint
Advanced TechnologyLaboratories, California, and in 2011 and 2012
hevisited Narus Inc, California. He has co-authoredover 180 papers
published in international journalsand presented in leading
international conferences,
all of them in the area of telecommunication networks. He
participated inthe program committees of several conferences
including ACM SIGCOMM,ACM CoNEXT, IEEE Infocom, IEEE Globecom and
IEEE ICC. He is AreaEditor of ACM CCR. His research interest are in
the design and investigationof energy efficient networks and in
traffic monitoring and analysis. He iscurrently the coordinator of
the mPlane Integrated Project that focuses onbulding an Intelligent
Measurement Plane for Future Network and ApplicationManagement
IntroductionPeerStreamer DescriptionPeerStreamer
ArchitectureOverlay Management
Neighborhood and Topology ConstructionMetrics Driving the
Neighborhood SelectionAdd FiltersDrop FiltersBlacklisting PoliciesA
Few Theoretical Considerations
Test-bed ConfigurationNetwork ScenariosPerformance Indices
Controlled Environment ExperimentsG_Homo ScenarioG_Homo with
Smaller NIG_Bias ScenarioG_Lossy ScenarioG_Adver Scenario
Video Performance EvaluationVideo performance versus loadScaling
with swarm sizeSensitivity to NI and Update Rate with Churning and
Flash Crowd
PlanetLab ExperimentsRelated
WorkConclusionsReferencesBiographiesStefano TraversoLuca
AbeniRobert BirkeCsaba KiralyEmilio LeonardiRenato Lo CignoMarco
Mellia