-
8/6/2019 Kimura American Installment
1/22
Copyright by SIAM. Unauthorized reproduction of this article is
prohibited.
SIAM J. APPL. MATH. c 2009 Society for Industrial and Applied
MathematicsVol. 70, No. 3, pp. 803824
AMERICAN CONTINUOUS-INSTALLMENT OPTIONS:
VALUATION AND PREMIUM DECOMPOSITION
TOSHIKAZU KIMURA
Abstract. Installment options are weakly path-dependent
contingent claims in which the pre-mium is paid discretely or
continuously in installments, instead of paying a lump sum at the
timeof purchase. This paper deals with valuing American
continuous-installment options written ondividend-paying assets.
The setup is a standard BlackScholesMerton framework where the
price ofthe underlying asset evolves according to a geometric
Brownian motion. The valuation of installmentoptions can be
formulated as an optimal stopping problem, due to the flexibility
of continuing orstopping to pay installments as well as the chance
of early exercise. Analyzing cash flow generatedby the optimal
stop, we can characterize asymptotic behaviors of the stopping and
early exerciseboundaries close to expiry. Combining the PDE and
Laplace transform approaches, we obtain theLaplace transform of the
initial premium in an explicit form, which is decomposed into the
valueof the associated European vanilla option with the same payoff
plus the premiums of early exerciseand halfway cancellation. We
also obtain a pair of nonlinear equations for the Laplace
transformsof the b oundaries. An Abelian theorem of Laplace
transforms enables us to obtain a concise resultfor the perpetual
case. We show that numerical inversion of these Laplace transforms
works well forcomputing both the option value and the
boundaries.
Key words. continuous installments, American-style options, free
boundary problem, Laplacetransforms, premium decomposition,
numerical inversion
AMS subject classifications. 91B28, 91B70, 60G40
DOI. 10.1137/080740969
1. Introduction. Installment options or pay-as-you-go options
are contingentclaims in which a small amount of up-front premium is
paid at the time of purchase,and then a sequence of installments
are paid up to a fixed maturity. Installmentoptions are
path-dependent in a weak sense such that their historical paths
affectthe value but the option payoff does not contain the paths
explicitly. The holder
has to pay installments to keep the contract alive, although
she/he has the rightto terminate the contract by stopping the
payments at any time, in which case thecontract is canceled and the
payoff vanishes. If the option is not worth the NPV (netpresent
value) of the remaining payments, she/he does not have to continue
to payfurther installments. Hence, an optimal stopping problem
arises for the installmentoption even in European style. For
American-style installment options, the holderalso has the right to
exercise the option at any time until maturity, and hence theoption
holder is faced with three decisionscancel, exercise, or do
nothingduringthe trading interval.
Installment options may appeal to an investor who is willing to
pay a little extrafor the opportunity of terminating the contract
and reducing losses caused by her/hisvoid investment position.
Actually, installment options have been traded actively in afew
markets, e.g., installment warrants on Australian stocks listed on
the Australian
Stock Exchange (ASX) [3, 4], a 10-year warrant with nine annual
payments offeredReceived by the editors November 16, 2008; accepted
for publication (in revised form) May 5,
2009; published electronically July 22, 2009. This research was
supported in part by the Grant-in-Aid for Scientific Research (A)
(grant 20241037) of the Japan Society for the Promotion of
Science(JSPS) in 20082012.
http://www.siam.org/journals/siap/70-3/74096.htmlGraduate School
of Economics and Business Administration, Hokkaido University,
Nishi 7, Kita
9, Kita-ku, Sapporo 060-0809, Japan
([email protected]).
803
-
8/6/2019 Kimura American Installment
2/22
Copyright by SIAM. Unauthorized reproduction of this article is
prohibited.
804 TOSHIKAZU KIMURA
by Deutsche Bank [10], and so on. Also, many life insurance
contracts and capitalinvestment projects can be thought of as
installment options [12]. However, therehave been relatively few
studies on installment options.
An installment option with payments at prespecified dates is
usually referred
to as a discrete-installment option, whereas its continuous-time
limit in which pre-mium is paid at a certain rate per unit time is
referred to as a continuous-installmentoption. For
discrete-installment options, Ben-Ameur, Breton, and Francois [4]
devel-oped a dynamic programming algorithm for computing the
American option valueapproximated by a piecewise-linear
interpolation, which is applied to valuing ASXinstallment warrants
with dilution effects. For European-style
discrete-installmentoptions, Davis, Schachermayer, and Tompkins
[10, 11] applied the concepts of com-pound options and NPV to
obtain no-arbitrage bounds of the initial call premiumin the
BlackScholesMerton framework, and then to examine dynamic and
statichedging strategies. Based on a compounding structure,
Griebsch, Kuhn, and Wystup[14] derived a closed-form pricing
formula in terms of multidimensional cumulativenormal distribution
functions.
As for European continuous-installment options, Alobaidi,
Mallier, and Deakin [2]
analyzed asymptotic properties of the optimal stopping boundary
close to maturity.Kimura [19] applied the Laplace transform
approach to the European case for obtain-ing transforms of the
initial premium, its Greeks, and the optimal stopping boundary,and
then he analyzed them quantitatively by a numerical transform
inversion. ForAmerican continuous-installment options, Ciurlia and
Roko [9] derived an integralrepresentation [6, 15, 17] of the
initial premium and applied the multipiece exponen-tial function
(MEF) method [16] to this representation. The MEF method,
however,generates discontinuous optimal stopping and early exercise
boundaries, which is aserious obstacle to decision-making of the
option holder. Caperdoni and Ciurlia [5]analyzed the perpetual
American case. The purpose of this paper is to value Amer-ican
continuous-installment options by using the Laplace transform
approach, whichgenerates smooth numerical solutions for the
boundaries and provides a much simplersolution for the perpetual
case.
This paper is organized as follows. The principal focus is on
the call case toavoid tedious repetition. We summarize the
corresponding results for the put casein Appendices A through C,
except for computational results. In section 2, basedon an optimal
stopping problem, we analyze asymptotic properties of the
stoppingand early exercise boundaries at expiry. In section 3,
applying the Laplace transformapproach to a PDE for the initial
premium, we obtain an explicit Laplace transform ofthe premium,
which is decomposed into the value of the associated European
vanillaoption with the same payoff plus the premiums of early
exercise and halfway cancel-lation. This premium decomposition
enables us to derive concise Laplace transformsfor some Greeks.
With the aid of the Abelian theorem of Laplace transforms,
weprovide the perpetual result in section 4. In section 5, to see
the power of the Laplacetransform approach and to clarify detailed
properties of the initial premium as well
as the stopping and early exercise boundaries, we show some
computational resultsboth for call and put cases. Finally, in
section 6, we give further remarks as well asdirections for future
research.
2. Free boundary formulation. Suppose an economy with finite
time period[0, T], a complete probability space (, F,P), and a
filtration F (Ft)t[0,T]. ABrownian motion process W (Wt)t[0,T] is
defined on (, F) and takes values in R.The filtration F is the
natural filtration generated by W and FT = F.
-
8/6/2019 Kimura American Installment
3/22
Copyright by SIAM. Unauthorized reproduction of this article is
prohibited.
AMERICAN CONTINUOUS-INSTALLMENT OPTIONS 805
Let (St)t[0,T] be the price process of the underlying asset. For
S0 given, assumethat (St)t[0,T] is a geometric Brownian motion
process,
dSt = (r )Stdt + StdWt, t [0, T],
where the coefficients (r,,) are constant. Here r represents the
risk-free rate ofinterest, the continuous dividend rate, and the
volatility of asset returns. Theasset price process (St)t[0,T] is
represented under the equivalent martingale measureP, which
indicates that the asset has mean rate of return r, and the process
W is aP-Brownian motion.
Consider an American-style continuous-installment call option
with the maturitydate T and strike price K. The payoff at maturity
is given by (ST K)+, where(x)+ = x 0. Let q > 0 be the
continuous installment rate, which means thatthe holder
continuously pays an amount q dt in time dt, while the asset itself
paysa continuous dividend in the amount of St dt to the holder at
the same time. LetC C(t, St; q) denote the value of the
continuous-installment call option at timet [0, T]. In the absence
of arbitrage opportunities, the value C(t, St; q) is a solutionof
an optimal stopping problem
C(t, St; q) = ess supe,s
E
1{esT}e
r(Tt)(ST K)+(2.1)
+ 1{e
-
8/6/2019 Kimura American Installment
4/22
Copyright by SIAM. Unauthorized reproduction of this article is
prohibited.
806 TOSHIKAZU KIMURA
0 0.2 0.4 0.6 0.8 1
t
60
80
100
120
140
exercise region
continuation region
stopping region
Bt
At
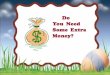
Fig. 1. Stopping, exercise, and continuation regions of an
American continuous-installmentcall option (T = 1, K = 100, r =
0.05, = 0.04, = 0.2, q = 5).
where Lt,S stands for the differential operator
Lt,Sv = vt
+ 122S2
2v
S2+ (r )Sv
S rv for v C1,2(C).
The boundary conditions of this PDE are given by
(2.3)
lim
SAtC(t, S; q) = 0, lim
SBtC(t, S; q) = Bt K,
limSAt
C
S= 0, lim
SBt
C
S= 1.
The first two (value matching) conditions imply that the initial
premium is continuousacross the boundaries, while the last two
(smooth pasting) conditions imply that theslope is continuous. The
terminal condition is clearly given by
(2.4) C(T, S; q) = (S K)+.It is sometimes convenient to work
with the equations where the current time t is
replaced by the remaining time to expiry T t. For notational
convenience, wewrite S ST = St, and we refer to (S)[0,T] as the
backward running process of(St)t[0,T]. For > 0, let C(, S; q) =
C(T , S; q), A = AT, and B = BT.On the basis of the PDE (2.2),
Ciurlia and Roko [9] proved that the value functionof the
continuous-installment call option has an integral representation,
which can berewritten in the time-reversed form as
C(, S; q) =
c(, S) q
0
er(u)
d(S,
Au, u)
du(2.5)
+ 0Se(u)d+(S, Bu, u) (rK q)er(u)d(S, Bu, u)du,
where ( ) is the standard normal cumulative distribution
function defined by
(x) =
x
(y)dy with (x) =12
e12
x2 , x R,
-
8/6/2019 Kimura American Installment
5/22
Copyright by SIAM. Unauthorized reproduction of this article is
prohibited.
AMERICAN CONTINUOUS-INSTALLMENT OPTIONS 807
d(x, y, ) =log(x/y) + (r 122)
,
and
c(, S) is the time-reversed value of the associated European
vanilla call option;
i.e., it is given by the so-called BlackScholes formula,(2.6)
c(, S) = Sed+(S,K,) Kerd(S,K,).
Theorem 2.1. The terminal values of the stopping and early
exercise boundaries
at expiry are given by
AT = K and BT = max
rK q
, K
.
Proof. From the value matching conditions in (2.3) and (2.5),
the time-reversed
boundaries A and B are implicitly defined byB K = c(, B) q
0
er(u)d( B, Au, u)du(2.7)+0
Be(u)d+( B, Bu, u) (rK q)er(u)d( B, Bu, u)du
and
0 = c(, A) q 0
er(u)
d( A, Au, u)du(2.8)+
0
Ae(u)d+( A, Bu, u) (rK q)er(u)
d(
A, Bu, u)
du.
Using (2.6) and rearranging the terms in (2.7) and (2.8), we
have
AK
=NA()
DA()and
BK
=NB()
DB(),
where
NA() = er
d( A, K , )+ r
0
er(u)
d( A, Bu, u)du+
q
K
0
er(u)
d( A, Au, u) d( A, Bu, u) ,DA() = e
d+( A, K , ) +
0
e(u)d+( A, Bu, u)du,NB() = e
r
d( B, K , ) 1 + r 0
er(u)
d( B, Bu, u)du+
q
K
0
er(u)
d( B, Au, u) d( B, Bu, u) ,DB() = e
d+( B, K , ) 1 + 0
e(u)
d+( B, Bu, u)du.
-
8/6/2019 Kimura American Installment
6/22
-
8/6/2019 Kimura American Installment
7/22
Copyright by SIAM. Unauthorized reproduction of this article is
prohibited.
AMERICAN CONTINUOUS-INSTALLMENT OPTIONS 809
sum (integral) of the time-reversed value c(, S; q) for
(infinitely many) different val-ues of the maturity T R+ [0, +),
and hence for R+, which makes LCTs bewell defined. Following this
interpretation, we assume hereafter that is a positivereal
number.
Lemma 3.1. Let c
(, S) = LC[c(, S)] be the LCT of the vanilla call value forthe
backward running process. Then,
c(, S) =
1(S), S < K,
2(S) +S
+ K
+ r, S K,
where for i = 1, 2,
(3.1) i(S) =K
1 2
+
1 r
+ r3i
S
K
i,
and the parameters 1 1() > 1 and 2 2() < 0 are two real
roots of thequadratic equation
(3.2) 1222 +
r 1
22
( + r) = 0.Proof. The vanilla call value c(t, S) satisfies the
same PDE as (2.2) with the
boundary conditions
(3.3) limS0
c(t, S) = 0 and limS
dc
dS<
and the terminal condition c(T, S) = (SK)+. Hence, the call
value for the backwardrunning process c(, S) c(T , ST) = c(t, St)
for = T t can be obtained bysolving the PDE
(3.4)
c + 122S2 2
cS2 + (r )ScS rc = 0, S > 0,with the conditions of the same
form as (3.3) and the initial condition c(0, S) =(S K)+. Taking the
LCTs of (3.4) and the boundary conditions, we see thatc(, S)
satisfies the ordinary differential equation (ODE)
(3.5) 122S2
dc
dS2+ (r )Sdc
dS ( + r)c + (S K)+ = 0, S > 0,
with the boundary conditions
(3.6) limS0
c(, S) = 0 and limS
dc
dS< .
It is straightforward to solve (3.5) with (3.6) as well as the
continuity conditions of
c(, S) and its first derivative at S = K. Assuming a general
solution of the form
(3.7) c(, S) =
2i=1
ai
S
K
i, S < K,
2i=1
bi
S
K
i+
S
+ K
+ r, S K,
-
8/6/2019 Kimura American Installment
8/22
-
8/6/2019 Kimura American Installment
9/22
Copyright by SIAM. Unauthorized reproduction of this article is
prohibited.
AMERICAN CONTINUOUS-INSTALLMENT OPTIONS 811
From the smooth pasting conditions in (3.12) and as well as the
continuity conditionsof C(, S; q) and its first derivative at S =
K, we can determine the four constantsai and bi (i = 1, 2), which
are given by,
(3.13)
ai = (1)i K
i
ig(A, B)(A)3i ,
bi = (1)i K1 2
+
1 r
+ r3i
,
where
(3.14) g(A, B) =
B
+2i=1 ibi BK i
(A)1(B)2 (A)2(B)1 .
From the value matching conditions in (3.12), we see that A and
B are given bysolving a pair of nonlinear equations
(3.15)
(A)1+2g(A, B) =q
+ r
121 2 ,
1
2(A)1(B)2 1
1(A)2(B)1
g(A, B) +
2i=1
bi
B
K
i=
B
+ rK q
+ r.
Rearranging the terms in (3.13)(3.15) and using Lemma 3.1, we
obtain the desiredresults (3.8)(3.10) after somewhat cumbersome
calculations.
Remark3. The solvability of the nonlinear equations in (3.10) is
an open problemdue to its complexity. However, we will see in
section 5 that the roots A and B can
be stably computed by the standard Newton method where the
initial values, say A0and B0 , are chosen from the terminal values
given in Theorem 2.1, i.e.,
A0 = K and B0 = max
rK q
, K
.
We see from Theorem 3.2 that the total premium in the
continuation regionC = (At, Bt) has the decomposition
(3.16) C(t, S; q) + Kt = c(t, S) + c(t, S; q) for S (At,
Bt),
where
(3.17) Kt = LC1 q + r = q 0 erudu = qr 1 er(Tt)
is the NPV of the future payment stream at time t [0, T], and
hence the left-hand side of (3.16) represents the total amount of
premiums to be paid during thetrading interval [t, T]. Due to the
additional rights to exercise early or to terminatethe contract,
the total payments charged for an installment option is greater
thanthat for a standard vanilla option if the holder keeps his
position until maturity. The
-
8/6/2019 Kimura American Installment
10/22
Copyright by SIAM. Unauthorized reproduction of this article is
prohibited.
812 TOSHIKAZU KIMURA
quantity c(t, S; q) represents the sum of the premiums of early
exercise and halfwaycancellation, which is obtained by inverting
its LCT as
(3.18) c(t, S; q) = c(T , S; q) = c(, S; q) = LC1[c (, S;
q)].
Using the relation (x) = 1 (x) (x R), we can rewrite the
integral representa-tion (2.5) as
(3.19) C(t, S; q) = c(t, S) Kt + ec(t, S; q) + hc(t, S; q),
where, for = T t,
ec(t, S; q)
=
0
Se(u)
d+(S, Bu, u) rKer(u)d(S, Bu, u)du
denotes the premium of early exercise, and
hc(t, S; q) = q
0
er(u)
d(S, Au, u)+ d(S, Bu, u) du
denotes the premium of halfway cancellation. From the premium
decomposition(3.16), we have
c(t, S; q) = ec(t, S; q) + hc(t, S; q).
It should be noted that the sum c(t, S) + ec(t, S; q) does not
coincide with thevalue of the associated American vanilla option,
because the early exercise bound-ary (Bt)t[0,T] is implicitly
affected by the stopping boundary (At)t[0,T] except for
q > 0.By virtue of the premium decomposition (3.16), we
obtain some Greeks ofC(t, S; q) in hybrid forms, as follows.
Corollary 3.3. For S (At, Bt), we have
C =C
S= c + LC1[c ],
C =2C
S2= c + LC1[c ],
C = C
= c + qer + LC1[c ],
where, for d
d(S,K,),
c = e
d+
,
c =e
S
d+
,
c = Se
2
d+
+ Se
d+ rKerd,
-
8/6/2019 Kimura American Installment
11/22
Copyright by SIAM. Unauthorized reproduction of this article is
prohibited.
AMERICAN CONTINUOUS-INSTALLMENT OPTIONS 813
and
c =1
S
q
+ r
121 2
S
A
2
S
A
1 11(S)
,
c =1
S2
q + r
121 2
(21)
SA
2 (11)
SA
1 1(11)1(S)
,
c =
q
+ r
121 2
1
2
S
A
2 1
1
S
A
1 1(S)
.
Proof. The results for C and C can be obtained from the premium
decompo-sition (3.16), the BlackScholes formula (2.6) for c(t, S),
and the relations
c = LC
cS
=
cS
and c = LC
2cS2
=
2cS2
,
while the result for C follows from (3.16), (2.6), and
c = LC
c
= {c (, S; q) c(0, S; q)} = c (, S; q),
because
c(0, S; q) = c(T, S; q) = C(T, S; q) + KT c(T, S)= (S K)+ (S K)+
= 0,
which completes the proof.Remark 4. We see from (3.8) and (3.11)
that there exists a parity relation among
the Greeks for c (, S; q) such that
(3.20) 122S2c + (r )Sc + c = rc ,
and hence that one of the Greeks can be computed by the other
two Greeks and c .
4. Perpetual continuous-installment call option. Consider the
case withinfinite maturity, i.e., T = . Let C(S; q) denote the
value of the perpetualcontinuous-installment call option for the
initial asset price S. Applying the Abeliantheorem of LTs to the
LCT C(, S; q) in Theorem 3.2, we can obtain the perpetualresult as
follows.
Theorem 4.1. For S (A, B),
C(S; q) = 1
1
(A)2S
1 + 12
(A)1S
2
(A)1 (B)
21 (A)
2 (B)
11
q
r
(4.1)
=q
r
12
1 2
1
1
S
A
1
+1
2
S
A
2
q
r,(4.2)
where 1 > 1 and 2 < 0 are two real roots of the quadratic
equation
(4.3) 122()2 + (r 122) r = 0,
-
8/6/2019 Kimura American Installment
12/22
Copyright by SIAM. Unauthorized reproduction of this article is
prohibited.
814 TOSHIKAZU KIMURA
and the constants A and B are the optimal threshold levels given
by
(4.4)
A =q
r
12
1 2
21 11
,
B = A = qr
12
1 22 1
in terms of > 1, which is the unique solution of the
equation
(4.5) 2(1 1)
1 1(2 1)
2 = (1 2)
1 rKq
.
Proof. By virtue of the final-value theorem of LTs, the
asymptotic value C(S; q)can be obtained by
C(S; q) = limT
C(t, S; q) = lim
C(, S; q) = lim0+
C(, S; q).
From (3.13) and (3.14), we see that for i = 1, 2lim
0+ai = (1)i K
i
i
(A)3i
(A)
1 (B)
21 (A)2 (B)11 ,
lim0+
bi = 0,
where A = lim0+ A(), B = lim0+ B
(), and i = lim0+ i() (i = 1, 2)are given by the roots of (4.3),
and hence that (4.1) holds for S (A, B). Letting 0+ in (3.15) and
using the change of variables
:=BA
> 1,
we have
(4.6)
B
2 1 =q
r
12
1 2,
B
2 1
11
1 +1
2
2
= B K+ q
r.
We obtain B and A in (4.4) as well as the alternative expression
in (4.2) fromthe first equation in (4.6) and the relation A = B/.
Equation (4.5) for can bederived by substituting B in (4.4) into
the second equation in (4.6). If we set
() 2(1 1)
1 1(2 1)
2 (1 2)
1 rKq
,
then it is easy to see thatlim1
() = (1 2)rK
q> 0,
lim
() = ,
() = 12
(1 1)
11 (2 1)
21
< 0 for > 1,
-
8/6/2019 Kimura American Installment
13/22
Copyright by SIAM. Unauthorized reproduction of this article is
prohibited.
AMERICAN CONTINUOUS-INSTALLMENT OPTIONS 815
and hence that the root of the equation () = 0 uniquely exists
in the interval(1, ).
Define the Greeks of C(S; q) as
C =dC
dS , C =
d2CdS2 , and
C = dC
d .
Clearly, C = 0. For C and C , from (4.2) we immediately have the
following.Corollary 4.2. For S (A, B),
C =1
S
q
r
12
1 2
S
A
2
S
A
1
,
C =1
S2q
r
12
1 2
(2 1)
S
A
2
(1 1)
S
A
1
.
Corollary 4.3. Let C = (A, B) denote the continuation region of
theperpetual American continuous-installment call option. Then, as
the installment rate
q increases, C shrinks monotonically and vanishes in the limit,
i.e., limq C = .Proof. From the equation () = 0, we have
d
dq=
(1 2)rKq21
2
(1 1)11 (2 1)21
< 0,lim
q(1) = 2(
1 1) 1(2 1) (1 2) = 0,
which proves the assertion.Remark 5. Caperdoni and Ciurlia [5]
also analyzed the perpetual continuous-
installment call and put options. For the call case, they
assumed a general form ofC(S; q) as
C(S; q) = a1S1 + a2S
2
q
r
, S
(A, B),
for constants ai (i = 1, 2) and obtained a set of four nonlinear
equations for a1, a2,A, and B, which have to be solved numerically.
However, there is no proof forthe existence and uniqueness of these
roots. No doubt, Theorem 4.1 provides a muchmore useful
representation of the perpetual solution.
If we fix the installment rate as q = rK, then from (4.5) we
obtain
(4.7) =
1(
2 1)
2(1 1)
11
2
.
It is worth noting that this solution has a form similar to the
early exercise boundaryof the Russian option [24]; see also
Proposition 4 of Kimura [18]. Another explicitsolution of (4.5) for
can be found when = 0, which is
(4.8) =
1 rKq
22r.
From > 1, we have q > r K , for which the value of the
perpetual continuous-installment call option does not coincide with
that of the perpetual Europeancontinuous-installment call option
with the same contractual features; see Remark 4of Kimura [19].
-
8/6/2019 Kimura American Installment
14/22
-
8/6/2019 Kimura American Installment
15/22
Copyright by SIAM. Unauthorized reproduction of this article is
prohibited.
AMERICAN CONTINUOUS-INSTALLMENT OPTIONS 817
Table 2
Initial premiums of American continuous-installment put options
(t = 0, K = 100, r = 0.05, = 0.04, = 0.2).
q S T = 0.5 T = 1 T = 5 T = 10 T =
1 95 7.505 8.872 12.577 13.742 14.456100 4.853 6.400 10.456
11.719 12.492105 2.914 4.448 8.630 9.958 10.778
5 95 6.224 6.653 7.045 7.052 7.052100 3.403 3.921 4.378 4.385
4.385105 1.492 1.976 2.422 2.429 2.429
10 95 5.369 5.430 5.444 5.444 5.444100 2.250 2.337 2.356 2.356
2.356105 0.507 0.579 0.595 0.595 0.595
60 80 100 120 140
S
10
20
30
40
A me ri can E uro pean
(a) call case
60 80 100 120 140
S
10
20
30
40
AmericanEuropean
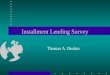
(b) put case
Fig. 2. American vs. European continuous-installment option
values (t = 0, T = 1, K = 100,q = 5, r = 0.05, = 0.04, = 0.2).
of the simultaneous equations in (3.10) ((B.3)) or the root ()
of the equation in(4.5) ((C.4)), we simply use the Newton method.
For finite-lived cases, the 6-pointextrapolation is used in the
GaverStehfest method. We see from these tables that thevalues of
initial premium become insensitive to the length T of the trading
interval asq grows, which implies that the perpetual value gives an
accurate approximation forfinite-lived cases, especially when the
position is in-the-money. On the contrary, forsmall q, the option
values are sensitive to T when the position is
out-of-the-money.
To see the early exercise premium of the American
continuous-installment option,we compare the values of American and
European continuous-installment call (put)options in Figure 2(a)
(2(b)), where the intrinsic value (S K)+ ((K S)+) isdrawn in a
dashed line. We compute the American option values by the
GaverStehfest method combined with the 4-point extrapolation and
the Newton method,whereas the European values are computed by the
algorithm developed in Kimura [19].From these figures, we observe
that (i) numerical inversion mostly works well evenaround the
smooth-pasting points; (ii) there is almost no difference between
the twocurves when the position is out-of-the-money; (iii) the
difference between two curves
looks almost constant at least when the position is
in-the-money. Obviously, thisdifference represents the early
exercise premium of the American option. The finding(iii) can be
stated more precisely by using the asymptotic value of the
Europeancontinuous-installment option obtained in Kimura [19,
Remark 1]. For the call case,the asymptotic result is written
as
c(t, S; q) Se(Tt) Ker(Tt) qr
1 er(Tt)
for large S K,
-
8/6/2019 Kimura American Installment
16/22
-
8/6/2019 Kimura American Installment
17/22
Copyright by SIAM. Unauthorized reproduction of this article is
prohibited.
AMERICAN CONTINUOUS-INSTALLMENT OPTIONS 819
figures, the curves for q = 5 in Figure 3 and those for = 0.03
in Figure 4 are drawn indashed lines. We can certify in these
figures that the terminal values at maturity areconsistent with the
theoretical results in Theorem 2.1. From Figure 3, we see that
thearea of continuation, region C, becomes narrower as q increases.
This property wasalso shown in numerical experiments of Ciurlia and
Roko [9], in which they proved forthe call case that C vanishes if
q , by using the integral representation (2.5); cf.Corollary 4.3 in
this paper. We observe from Figure 4(a) that the region C for the
callcase also becomes narrower as increases, and that the stopping
boundary (At)t[0,T]is less sensitive to the value of than the early
exercise boundary (Bt)t[0,T]. However,for the put case in Figure
4(b), we see that the region C slightly grows as increases,although
both boundaries (Ft)t[0,T] and (Gt)t[0,T] are almost
insensitive.
6. Concluding remarks. In this paper, for American
continuous-installmentcall/put options with a given installment
rate q, we analyzed their initial premiums,stopping and early
exercise boundaries, and some hedging parameters by combiningthe
PDE approach with LCTs. From a financial point of view, the
question of howto determine an appropriate installment rate q is
also an important problem. For
discrete-installment options with premium payments q0 at time t0
= t and q1 at timest1, . . . , tn (t, T), a uniform installment
plan with q0 = q1 can be considered asa reasonable candidate for
determining q1. For continuous-installment options, theuniform
installment plan implies the null initial premium, i.e., C(t, S; q)
= 0 for thecall case, and the uniform installment rate, say q, can
be obtained by solving aminimization problem
q = inf{q > 0 | C(t, S; q) = 0} .
As pointed out by Griebsch, Kuhn, and Wystup [14], the
minimization is requiredto obtain a unique rate, which is due to
the fact that C(t, S; q) can never becomenegative, as it is always
possible to stop paying installments immediately. Of course,we
could consider more sophisticated installment plans, which can be
formulated asan optimization problem. This is a direction of future
research.
Like finite-difference methods and lattice models, we believe
that the PDE/ LCTapproach has the potential power to deal with
further generalizations to, e.g., (i)options with a general payoff
function at expiry, (ii) exotic options whose initialpremium
satisfies the inhomogeneous PDE in (2.2), and (iii) price processes
with
jumps [23], stochastic volatility [20], and so on. These
generalizations also may beconsidered as directions for future
research.
Appendix A. Free boundary formulation for puts. In much the same
wayas for the call case, we can also consider the put case with the
maturity date T,strike price K, and installment rate q. Let P P(t,
S; q) denote the value of thecontinuous-installment put option at
time t [0, T]. Then, the put value P(t, S; q)(t [0, T]) is a
solution of an optimal stopping problem similar to (2.1),
P(t, S; q) = esssupe,s
E 1{esT}er(Tt)(K ST)+(A.1)+ 1{e
-
8/6/2019 Kimura American Installment
18/22
Copyright by SIAM. Unauthorized reproduction of this article is
prohibited.
820 TOSHIKAZU KIMURA
0 0.2 0.4 0.6 0.8 1
t
60
80
100
120
140
stopping region
continuation region
exercise region
Gt
Ft
Fig. 5. Stopping, continuation, and exercise regions of an
American continuous-installmentput option (T = 1, K = 100, r =
0.05, = 0.04, = 0.2, q = 5).
respectively. To distinguish the boundaries of these regions
from those for the callcase, we denote the exercise boundary by
(Ft)t[0,T] and the stopping boundary by(Gt)t[0,T]. Since the put
value P(t, S; q) is nonincreasing in S, unlike the call case,we see
that (Ft)t[0,T] becomes a lower boundary and (Gt)t[0,T] an upper
boundary;see Figure 5.
The put value P(t, S; q) satisfies the same PDE as (2.2),
(A.2) Lt,S P(t, S; q) = q, Ft < S < Gt,together with the
boundary conditions
(A.3)
limSFt
P(t, S; q) = K Ft, limSGt
P(t, S; q) = 0,
limSFt
P
S = 1, limSGtP
S = 0,
and the terminal condition
(A.4) P(T, S; q) = (K S)+.Corresponding to (2.5), we have the
integral representation
P(, S; q) = p(, S) q 0
er(u)d(S, Gu, u)du(A.5)
+
0
(rK+ q)er(u)
d(S, Fu, u) Se(u)
d+(S,
Fu, u)du,
where p(t, S) is the value of the associated European vanilla
put option, defined by
(A.6) p(, S) = Kerd(S,K,) Sed+(S,K,).In much the same way as in
Theorem 2.1, we can prove that
FT = min
rK + q
, K
and GT = K,
-
8/6/2019 Kimura American Installment
19/22
Copyright by SIAM. Unauthorized reproduction of this article is
prohibited.
AMERICAN CONTINUOUS-INSTALLMENT OPTIONS 821
from which we obtain FT = K for = 0, and FT min
r
, 1
K for > 0; cf. Corol-lary 2.2 and (2.9).
Appendix B. Valuation with LCTs for puts. For American vanilla
call andput options, it is well known that there exist certain
symmetric relations betweenthe values and the early exercise
boundaries of American options; see McDonaldand Schroder [21].
However, such symmetric relations do not hold for
continuous-installment options with constant installment rate,
which can be easily verified bychecking the integral
representations (2.5) and (A.5). This means that results parallelto
Theorem 3.2 and Corollary 3.3 should be given separately for the
continuous-installment put option. We simply provide those results
without proofs.
Lemma B.1. Let p(, S) = LC[p(, S)] be the LCT of the vanilla put
value forthe backward running process. Then
p(, S) =
1(S) S
+ +
K
+ r, S < K,
2(S), S K.Theorem B.2. The LCT P(, S; q) for the American
continuous-installment
put option is given by
(B.1) P(, S; q) =
K S, S [0, F],
p(, S) + p(, S; q) q
+ r, S (F, G),
0, S [G, ),where p (, S; q) is defined by
(B.2) p (, S; q) =q
+ r
121 2
1
2
S
G
2 1
1
S
G
1 2(S),
and F and G are given by solving a pair of nonlinear
equations
(B.3)
q
+ r
121 2
1
2
F
G
2 1
1
F
G
1
= 1(F) + 2(F) +
F +K+ q
+ r,
q
+ r
121 2
F
G
2
F
G
1
= 11(F) + 22(F) +
F.
We see from Theorem B.2 that the total premium for the put
option also has thedecomposition
(B.4) P(t, S; q) + Kt = p(t, S) + p(t, S; q),
where p(t, S; q) represents the sum of the premiums of early
exercise ep(t, S; q) andof halfway cancellation hp(t, S; q). From
the integral representation (A.5), they are
-
8/6/2019 Kimura American Installment
20/22
Copyright by SIAM. Unauthorized reproduction of this article is
prohibited.
822 TOSHIKAZU KIMURA
given by
ep(t, S; q)
=
0 rKer(u)d(S, Fu, u) Se(u)d+(S, Fu, u)duand
hp(t, S; q) = q
0
er(u)
d(S, Fu, u)+ d(S, Gu, u)du.
Corollary B.3. For S (Ft, Gt), we have
P =P
S= p + LC1[p ],
P =2P
S2= p + LC1[p ],
P = P
= p + qe
r
+ LC1
[
p ],
where for d d(S,K,),p = e
d+ 1 ,
p = c =e
S
d+
,
p = Se
2
d+ Sed++ rKerd,
and
p =
1
S q + r 121 2 SG2
SG1
22(S) ,p =
1
S2
q
+ r
121 2
(21)
S
G
2 (11)
S
G
1 2(21)2(S)
,
p =
q
+ r
121 2
1
2
S
G
2 1
1
S
G
1 2(S)
.
Appendix C. Perpetual continuous-installment put option. For the
putcase, we can also have parallel results. Actually, the
continuation region C =(F, G) for the put option also shrinks as q
. For later convenience, wewrite down the results on the value P(S;
q) and its Greeks without their proofs.
Theorem C.1. For S (F, G),
P(S; q) = 1
1
(G)2S
1 + 12
(G)1 S
2
(G)
1 (F)
21 (G)2 (F)11
q
r(C.1)
=q
r
12
1 2
1
1
S
G
1
+1
2
S
G
2
q
r,(C.2)
-
8/6/2019 Kimura American Installment
21/22
Copyright by SIAM. Unauthorized reproduction of this article is
prohibited.
AMERICAN CONTINUOUS-INSTALLMENT OPTIONS 823
where i (i = 1, 2) are two real roots of the quadratic equation
(4.3), and the constantsF and G are the optimal threshold levels
given by
(C.3) F =
q
r
12
1
2 2
1 ,G =
F
=q
r
12
1 2
21 11
in terms of (0, 1), which is a unique solution of the
equation
(C.4) 2(1 1)
1 1(2 1)
2 = (1 2)
1 +rK
q
.
Corollary C.2. For S (F, G),
P =dP
dS=
1
S
q
r
12
1
2
S
G2
S
G1
,
P =d2P
dS2=
1
S2q
r
12
1 2
(2 1)
S
G
2
(1 1)
S
G
1
.
For = 0, (C.4) for also can be solved explicitly, obtaining
(C.5) =
1 +
rK
q
22r
.
Unlike the call case, however, the solution is defined for
arbitrary q > 0.
Acknowledgments. I would like to thank Kazuaki Kikuchi of
Sumitomo MitsuiBanking Corporation for his contribution to these
computational experiments. Special
thanks are also due to the anonymous referees for their
comments.
REFERENCES
[1] J. Abate and W. Whitt, The Fourier-series method for
inverting transforms of probabilitydistributions, Queueing Systems,
10 (1992), pp. 588.
[2] G. Alobaidi, R. Mallier, and S. Deakin, Laplace transforms
and installment options, Math.Models Methods Appl. Sci., 14 (2004),
pp. 11671189.
[3] H. Ben-Ameur, M. Breton, and P. Francois, Pricing ASX
Installment Warrants underGARCH, Working Paper G-2005-42, GERAD,
Montreal, QC, Canada, 2005.
[4] H. Ben-Ameur, M. Breton, and P. Francois, A dynamic
programming approach to priceinstallment options, European J. Oper.
Res., 169 (2006), pp. 667676.
[5] C. Caperdoni and P. Ciurlia, Pricing of Perpetual American
Continuous-Installment Op-tions, Working Paper, Universita degli
Studi Milano-Bicocca, Milan, Italy, 2004.
[6] P. Carr, R. Jarrow, and R. Myneni, Alternative
characterizations of American puts, Math.
Finance, 2 (1992), pp. 87106.[7] P. Carr, Randomization and the
American put, Rev. Financ. Stud., 11 (1998), pp. 597626.[8] C.
Chiarella, A. Kucera, and A. Ziogas, A Survey of the Integral
Representation of Amer-
ican Option Prices, Research Paper Series 118, Quantitative
Finance Research Centre,University of Technology, Sydney,
Australia, 2004.
[9] P. Ciurlia and I. Roko, Valuation of American
continuous-installment options, Comput.Econ., 25 (2005), pp.
143165.
[10] M. Davis, W. Schachermayer, and R. Tompkins, Pricing,
no-arbitrage bounds and robusthedging of installment options,
Quant. Finance, 1 (2001), pp. 597610.
-
8/6/2019 Kimura American Installment
22/22
824 TOSHIKAZU KIMURA
[11] M. Davis, W. Schachermayer, and R. Tompkins, Installment
options and static hedging, J.Risk Finance, 3 (2002), pp. 4652.
[12] M. Davis, W. Schachermayer, and R. Tompkins, The evaluation
of venture capital as aninstallment option, Z. Betriebswirtschaft,
3 (2004), pp. 7796.
[13] D. P. Gaver, Observing stochastic processes and approximate
transform inversion, Oper. Res.,
14 (1966), pp. 444459.[14] S. Griebsch, C. Kuhn, and U. Wystup,
Installment options: A closed-form solution and the
limiting case, in Mathematical Control Theory and Finance, A.
Sarychev, A. Shiryaev, M.Guerra, and M. R. Grossinho, eds.,
Springer, Berlin, 2008, pp. 211229.
[15] S. D. Jacka, Optimal stopping and the American put, Math.
Finance, 1 (1991), pp. 114.[16] N. Ju, Pricing an American option
by approximating its early exercise boundary as a multipiece
exponential function, Rev. Financ. Stud., 11 (1998), pp.
627646.[17] I. J. Kim, The analytical valuation of American
options, Rev. Financ. Stud., 3 (1990), pp. 547
572.[18] T. Kimura, Valuing finite-lived Russian options,
European J. Oper. Res., 189 (2008), pp. 363
374.[19] T. Kimura, Valuing continuous-installment options,
European J. Oper. Res., to appear.[20] A. L. Lewis, Option
Valuation under Stochastic Volatility, Finance Press, Newport
Beach, CA,
2000.[21] R. McDonald and M. Schroder, A parity result for
American options, J. Comput. Finance,
1 (1998), pp. 513.
[22] R. C. Merton, Theory of rational option pricing, Bell J.
Econ. Manage. Sci., 4 (1973), pp. 141183.[23] G. Petrella and S.
Kou, Numerical pricing of discrete barrier and lookback options
via
Laplace transforms, J. Comput. Finance, 8 (2004), pp. 137.[24]
L. Shepp and A. N. Shiryaev, The Russian options: Reduced regret,
Ann. Appl. Probab., 3
(1993), pp. 631640.[25] H. Stehfest, Algorithm 368: Numerical
inversion of Laplace transforms, Comm. ACM, 13
(1970), pp. 4749.