Embed Size (px)
Citation preview

KEEE313(03)
Signals and Systems
Chang-Su Kim

Course Information
Course homepage
http://mcl.korea.ac.kr
Lecturer
Chang-Su Kim
Office: Engineering Bldg, Rm 508
E-mail: [email protected]
Tutor
허육 ([email protected])

Course Information
Objective
Study fundamentals of signals and systems
Main topic: Fourier analysis
Textbook
A. V. Oppenheim and A. S. Willsky, Signals &
Systems, 2nd edition, Prentice Hall, 1997.
Reference
M. J. Roberts, Signals and Systems, McGraw
Hill, 2003.

Course Information
Prerequisite
Advanced Engineering Mathematics
Manipulation of complex numbers
Assessment
Exercises 15 %
Midterm Exam 30 %
Final Exam 40 %
Attendance 15 %

Course Schedule
First, Chapters 1-5 of the textbook will be coveredLinear time invariant systems
Fourier analysis
Then, selected topics in Chapters 6-10 will be taught, such as
Filtering
Sampling
Modulation
Laplace Transform
Z-transform
Midterm exam: 7 APR 2016 (Thursday)

Policies and Rules
ExamsScope: all materials taught
Closed book
A single sheet of hint paper (both sizes)
AttendanceChecked sometimes
QuizzesPop up quizzes: not announced before
# of quizzes is also variant
AssignmentsNo late submission is allowed

What Are Signals and Systems?
Signals
Functions of one or more independent variables
Contain information about the behavior or
nature of some phenomenon
Systems
Respond to particular signals by producing other
signals or some desired behavior

Examples of Signals and Systems (2005)

Examples of Signals and Systems (2006)

Examples of Signals and Systems (2007)

Examples of Signals and Systems (2008)
Examples of Signals and Systems (2009)

Examples of Signals and Systems (2014)

Examples of Signals and Systems (2016)

Audio Signals
f(t)
Function of time t
Acoustic pressure
S I GN AL

Image Signals
f(x,y)
Function of spatial
coordinates (x, y)
Light intensity

Image Signals
Color images
r(x,y)
g(x,y)
b(x,y)

Video Signals
Functions of space and time
r(x,y,t)
g(x,y,t)
b(x,y,t)

Video Signals
Functions of space and time
r(x,y,t)
g(x,y,t)
b(x,y,t)


원본
안정화(warping)Rolling shutter 왜곡 제거

Systems
•Input signal: left, kick,
•punch, right, up, down,…
•Output signal: sound and graphic data

Systems
•Input image •Output image
•Image processing system

Scope of “Signals and Systems” is broad
Multimedia is just a tiny portion of signal classes
The concept of signals and systems arise in a wide variety of fields
•Input signal
•- pressure on
• accelerator
• pedal
•Output signal
•- velocity

Scope of “Signals and Systems” is broad
Multimedia is just a tiny portion of signal classes
The concept of signals and systems arise in a wide variety of fields
Input signal
- time spent
on study
Output signal
- mark on
midterm exam

Mathematical Framework
The objective is to develop a mathematical
framework
for describing signals and systems and
for analyzing them
We will deal with signals involving a single
independent variable only
𝑥(𝑡) (or 𝑥[𝑛])
For convenience, the independent variable 𝑡 (or 𝑛) is
called time, although it may not represent actual time
It can in fact represent spatial location (e.g. in image
signal)

Continuous-Time Signals 𝑥(𝑡) vs.
Discrete-Time Signals 𝑥[𝑛]
𝑥[𝑛] is defined only for integer values of the independent variable n
𝑛 = ⋯ ,−2,−1, 0, 1, 2,…
𝑥[𝑛] can be obtained from sampling of CT signals or some signals are inherently discrete
DT signalCT signal

Examples of DT Signals

Signal Energy and Power
Energy: accumulation of squared magnitudes
Power: average squared magnitudes
dttxdttxE
T
TT
22)()(lim
2 2lim [ ] [ ]
N
Nn N n
E x n x n
21lim ( )
2
T
TT
P x t dtT
21lim [ ]
2 1
N
Nn N
P x nN

Classification of signals
Category 1: Energy signal (𝐸 < and thus 𝑃 = 0)
e.g.
Category 2: Power signal (𝐸 = but 𝑃 < )
e.g.
Category 3: Remaining signals (i.e. with infinite
energy and infinite power)
e.g.
0,
0,0)(
te
ttx
t
( ) 1x t
( )x t t
Signal Energy and Power
Transformations of Independent Variable
Three possible time transformations
1. Time Shift: 𝑥(𝑡 − 𝑎), 𝑥[𝑛 − 𝑎]
Shifts the signal to the right when 𝑎 > 0, while to
the left when 𝑎 < 0.
2. Time Reversal: 𝑥 −𝑡 , 𝑥[−𝑛]
Flips the signal with respect to the vertical axis.
3. Time Scale: 𝑥(𝑎𝑡), 𝑥[𝑎𝑛] for 𝑎 > 0.
Compresses the signal length when 𝑎 > 1, while
stretching it when 𝑎 < 1.

Time Reversal
Time Shift
Transformations of Independent Variable
21
x(-t)
t
1
-2 -1
t
-3
x(t+1)
1
-2 -1
t
1
x(t-1)
1
-2 -1
t
x(t)
1

Time Scaling
Combinations
Transformations of Independent Variable
-1/2
t
-1
x(-2t)
1
x(-t+3)
21
t
43 65
1
-1/2
t
-1
x(2t)
1
-2 -1
t
-3
x(t/2)
-4
1
-2 -1
t
x(t)
1

Transformations of Independent Variable

Periodic Signals
𝑥(𝑡) is periodic with period 𝑇, if
𝑥(𝑡) = 𝑥(𝑡 + 𝑇) for all 𝑡
𝑥[𝑛] is periodic with period 𝑁, if
𝑥[𝑛] = 𝑥[𝑛 + 𝑁] for all 𝑛
Note that 𝑁 should be an integer
Fundamental period (𝑇0 or 𝑁0):
The smallest positive value of 𝑇 or 𝑁 for
which the above equations hold

Periodic Signals

Periodic Signals
Is this periodic?

Even and Odd Signals
𝑥[𝑛] is even, if 𝑥[−𝑛] = 𝑥[𝑛]
𝑥[𝑛] is odd, if 𝑥[−𝑛] = −𝑥[𝑛]
Any signal 𝑥[𝑛] can be divided
into even component 𝑥𝑒[𝑛] and
odd component 𝑥𝑜[𝑛]𝑥[𝑛] = 𝑥𝑒[𝑛] + 𝑥𝑂[𝑛]
𝑥𝑒[𝑛] = (𝑥[𝑛] + 𝑥[−𝑛])/2
𝑥𝑂[𝑛] = (𝑥[𝑛] − 𝑥[−𝑛])/2
Similar arguments can be made
for continuous-time signals
Even function
Odd function
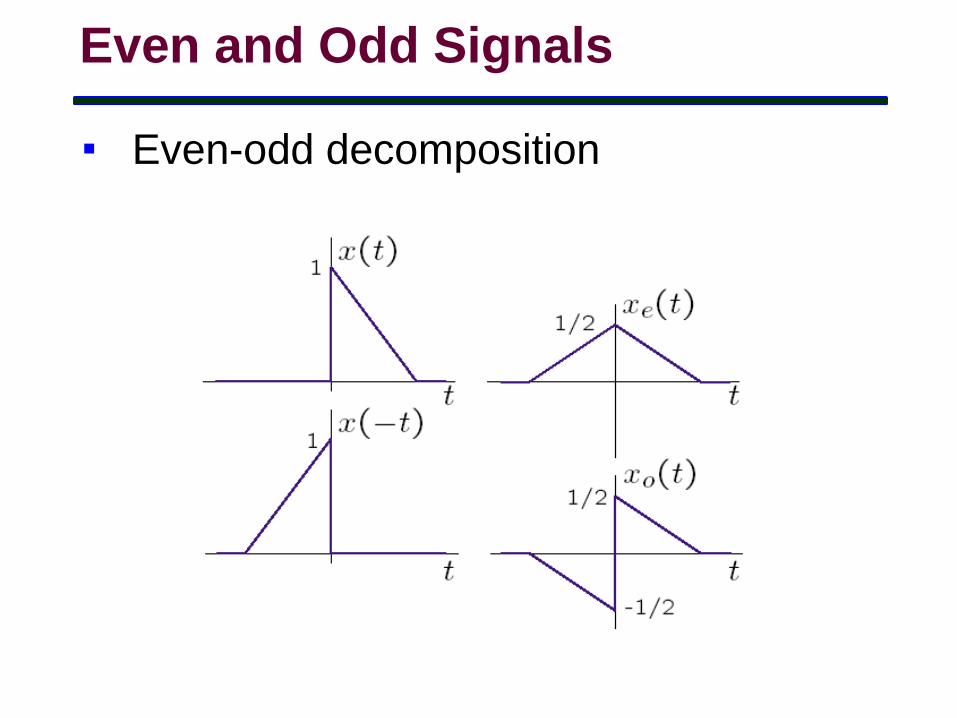
Even and Odd Signals
Even-odd decomposition

Exponential and Sinusoidal
Signals

Euler’s Equation
Euler’s formula
Complex exponential functions facilitate the manipulation of sinusoidal signals.
For example, consider the straightforward extension of differentiation formula of exponential functions to complex cases.
)(2
1sin
)(2
1cos
sincos
jj
jj
j
eej
ee
je

Periodic Signals
Periodicity conditionx(t) = x(t+T)
If T is a period of x(t), then mT is also a period, where m=1,2,3,…
Fundamental period T0
of x(t) is the smallest possible value of T.
Exercise: Find T0 for cos(0t+) and sin(0t+)
Periodicity conditionx[n] = x[n+N]
If N is a period of x[n], then mN is also a period, where m=1,2,3,…
Fundamental period N0 of x[n] is the smallest possible value of N.
CT Signal DT Signal

Sinusoidal Signals
x(t) = A cos(t+) or x[n] = A cos(n+)A is amplitude
is radian frequency (rad/s or rad/sample)
is the phase angle (rad)
Notice that although
A cos(0t+) ≠ A cos(1t+),
it may hold that
A cos[0n+] = A cos[1n+].
Do you know when?

Periodic Complex Exponential Signals
x(t) = or x[n] =
A, and are real.
Is periodic?
How about the discrete case? Is
periodic?
It is periodic when /2p is a rational number
( )j tAe ( )j nAe
( ) j tz t Ae
[ ] j nz n Ae
2
3
3
5
2
2
Ex 1) [ ]
Ex 2) [ ]
Ex 3) [ ]
j n
j n
j n
z n e
z n e
z n e
p
p
p

Review of Sinusoidal and Periodic
Complex Exponentials
CT case
These are periodic with period 2p/w.
Also,
DT case
These are periodic only if w/2p is a rational number.
Also,
( ) cos( ), sin( ) or j tx t wt wt e
[ ] cos( ), sin( ) or j nx n wn wn e
1 2
1 2
1 2 1 2
If ,
cos( ) cos( ), sin( ) sin( ) and j t j t
w w
w t w t w t w t e e
1 2
1 2
1 2 1 2
If 2 ,
cos( ) cos( ), sin( ) sin( ) and j n j n
w w k
w n w n w n w n e e
p

Real Exponential Signals
x(t) = A est or x[n] = A esn
A and s are real.
positive s negative s

General Exponential Signals
( )( )
[cos( ) sin( )]
st j jw t
t
x t Xe Ae e
Ae wt j wt
s
s
Real part of x(t) according to s ( is assumed to be 0)

Impulse and Step Functions

DT Unit Impulse Function
Unit Impulse
Shifted Unit Impulse
1, 0[ ]
0, 0
nn
n
[n]
-1-2
n
1-3 32
1
[n-k]
…-1
n
1 k
11,
[ ]0,
n kn k
n k

DT Unit Step Function
Unit Step
Shifted Unit Step
1, 0[ ]
0, 0
nu n
n
u[n]
-1-2
n
1-3 32
1
u[n-k]
…-1
n
1 k
11,[ ]
0,
n ku n k
n k

Properties of DT Unit Impulse and Step
Functions
0
0 0 0
1) [ ] [ ] [ 1]
2) [ ] [ ] [ ]
3) [ ] [ ] [0] [ ]
4) [ ] [ ] [ ] [ ]
5) [ ] [ ] [ ]
n
k k
k
n u n u n
u n k n k
x n n x n
x n n n x n n n
x n x k n k

CT Unit Step Function
Unit Step
Shifted Unit Step
1, 0( )
0, 0
tu t
t
t
1
u(t- )
t
1
u(t)
1,( )
0,
tu t
t

CT Unit Step Function
Unit step is discontinuous at t=0, so is not
differentiable
Approximated unit step
u(t) is continuous and differentiable.
0, 0
( ) , 0
1,
t
tu t t
t
t
1
u(t)
0( ) lim ( )u t u t
1, 0( )
0, otherwise
tdu t
dt

CT Unit Impulse Function
Approximated unit impulse
Unit Impulse:
0
, 0( ) lim ( )
0, 0
( ) 1 for any 0 and 0.
b
a
tt t
t
t dt a b
t
(t)
t
(t)
1, 0( )
( )
0, otherwise
tdu tt
dt
1/

CT Unit Impulse Function
Shifted Unit Impulse
t
(t-)

Properties of CT Unit Impulse and Step
Functions
0
0 0 0
( )1) ( )
2) ( ) ( ) ( )
3) ( ) ( ) (0) ( )
4) ( ) ( ) ( ) ( )
5) ( ) ( ) ( )
t
du tt
dt
u t d t d
x t t x t
x t t t x t t t
x t x t d

Comparison of DT and CT Properties
0 0
Difference becomes ( )[ ] [ ] [ 1] ( )
differentiation
Summation becomes [ ] [ ] [ ] ( ) ( ) ( )
integration
Impulse functions [ ] [ ] [0] [ ] ( ) (
sample values
tn
k k
du tn u n u n t
dt
u n k n k u t d t d
x n n x n x t t
0 0 0 0 0 0
) (0) ( )
Shifted impulse [ ] [ ] [ ] [ ] ( ) ( ) ( ) ( )
functions
Sifting Property:
Arbitrary functions as sum [ ] [ ] [ ] ( ) ( ) ( )
or integration of delta functionsk
x t
x n n n x n n n x t t t x t t t
x n x k n k x t x t d

Can you represent these functions using
step functions?
tc
x(t)
a b
1
y(t)
-1 1t
1
w(t)
-1 1t
2z(t)
-1
1t
2
-2

x[n]
…-1
n
1 N
1
y[n]
… -1
n
1 4
1
-2 32 5-3 …
Can you represent these functions using
step functions?

Basic System Properties

What is a System?
System is a black box that takes an input signal and
converts it to an output signal.
DT System: y[n] = H[x[n]]
CT System: y(t) = H(x(t))
Hx[n] y[n]
Hx(t) y(t)

Interconnection of Systems
Series (or cascade) connection: y(t) = H2( H1( x(t) ) )
e.g. a radio receiver followed by an amplifier
Parallel connection: y(t) = H2( x(t) ) + H1( x(t) )
e.g. Carrying out a team project
H1
x(t)
H1
x(t) y(t)
H2
y(t)
H2
+

Feedback connection: y(t) = H1( x(t)+H2( y(t) ) )
e.g. cruise control
Various combinations of connections are also
possible
H1
x(t) y(t)
H2
+
Interconnection of Systems

Memoryless Systems vs.
Systems with Memory
Memoryless Systems: The output y(t) at any instance t depends
only on the input value at the current time t, i.e. y(t) is a function
of x(t)
Systems with Memory: The output y(t) at any instance t depends
on the input values at past and/or future time instances as well
as the current time instance
Examples:
A resistor: 𝑦(𝑡) = 𝑅𝑥(𝑡)
A capacitor:
𝑦 𝑡 =1
𝐶න−∞
𝑡
𝑥 𝜏 𝑑𝜏
A unit delayer: 𝑦[𝑛] = 𝑥[𝑛 − 1]
An accumulator:
𝑦 𝑛 =
𝑘=−∞
𝑛
𝑥[𝑘]

Causality
Causality: A system is causal if the output at any time
instance depends only on the input values at the current
and/or past time instances.
Examples:
𝑦[𝑛] = 𝑥[𝑛] − 𝑥[𝑛 − 1]
𝑦(𝑡) = 𝑥(𝑡 + 1)
Is a memoryless system causal?
Causal property is important for real-time processing.
But in some applications, such as image processing,
data is often processed in a non-causal way.
image
processing

Applications of Lowpass Filtering
Preprocessing before machine recognition
Removal of small gaps

Applications of Lowpass Filtering
Cosmetic processing of photos

Invertibility
Invertibility: A system is invertible if distinct inputs
result in distinct outputs.
If a system is invertible, then there exists an inverse system
which converts the output of the original system to the
original input.
Examples:
)(4
1)(
)(4)(
tytw
txty
]1[][][
][][
nynynw
kxnyn
k
System𝑥(𝑡) Inverse
System
𝑤(𝑡) = 𝑥(𝑡)𝑦(𝑡)
( ) ( )
( )( )
t
y t x d
dy tw t
dt

Stability
Stability: A system is stable if a bounded input yields
a bounded output (BIBO).
In other words, if 𝑥 𝑡 < 𝑘1 then |𝑦(𝑡)| < 𝑘2.
Examples:
0
( ) ( )
t
y t x d
][100][ nxny

Linearity
A system is linear if it satisfies two properties.
Additivity: 𝑥 𝑡 = 𝑥1(𝑡) + 𝑥2(𝑡) ⇒ 𝑦(𝑡) = 𝑦1(𝑡) + 𝑦2(𝑡)
Homogeneity: 𝑥 𝑡 = 𝑐 𝑥1(𝑡) ⇒ 𝑦(𝑡) = 𝑐 𝑦1(𝑡),
for any constant 𝑐
The two properties can be combined into a single
property.
linearity:
𝑥 𝑡 = 𝑎𝑥1(𝑡) + 𝑏𝑥2(𝑡) ⇒ 𝑦(𝑡) = 𝑎𝑦1(𝑡) + 𝑏𝑦2(𝑡)
Examples
)()( 2 txty ][][ nnxny ( ) 2 ( ) 3y t x t

Time-Invariance
A system is time-invariant if a delay (or a time-shift) in
the input signal causes the same amount of delay in
the output.
𝑥 𝑡 = 𝑥1(𝑡 − 𝑡0) ⇒ 𝑦(𝑡) = 𝑦1(𝑡 − 𝑡0)
Examples:
][][ nnxny )2()( txty )(sin)( txty

Superposition in LTI Systems
For an LTI system:
Given response y(t) of the system to an input signal x(t), it is
possible to figure out response of the system to any signal
x1(t) that can be obtained by “scaling” or “time-shifting” the
input signal x(t), because
𝑥1 𝑡 = 𝑎0 𝑥 𝑡 − 𝑡0 + 𝑎1 𝑥 𝑡 − 𝑡1 + 𝑎2𝑥 𝑡 − 𝑡2 +⋯
⇒𝑦1 𝑡 = 𝑎0 𝑦 𝑡 − 𝑡0 + 𝑎1 𝑦 𝑡 − 𝑡1 + 𝑎2𝑦 𝑡 − 𝑡2 +⋯
Very useful property since it becomes possible to
solve a wider range of problems.
This property will be basis for many other techniques
that we will cover throughout the rest of the course.

Superposition in LTI Systems
Exercise: Given response y(t) of an LTI system to the input
signal x(t), find the response of that system to another input
signal x1(t) shown below.
2
x(t)
1
t1
y(t)
-1 1t
2
x1(t)
1 t
-1
3





























