Embed Size (px)
Citation preview

Track irregularities and vehicle responseTomas Karis, Mats Berg & Sebastian StichelKTH Railway Group

Agenda• Introduction• Theory and method• Preliminary results• Conclusions and next steps
2KTH RAILWAY GROUP

Introduction
3KTH RAILWAY GROUP

Track irregularities and vehicle response• How closely correlated are
track irregularities and vehicle response?
• Important for • vehicle dynamics certification
(e.g. EN 14363)• track maintenance
(e.g. EN 13848)• With standard evaluation methods
the irregularity-response correlation varies a lot
• Alternative evaluation methods?
4KTH RAILWAY GROUP

Longitudinal level (vertical)
Cant irregularity
Alignment (lateral)
Track gauge
Track centre line
Longitudinal direction
Wheel-rail forces
Track irregularities and vehicle response
Carbody accelerations
Bogie-carbodymovements
Axle box accelerations
Bogie frame accelerations
5KTH RAILWAY GROUP

On-track measurementsGreen TrainSwedish research programme using a modified Regina EMU as a test bench.
DynoTrainEU project aiming at resolving openpoints in EN 14363
6KTH RAILWAY GROUP

Theory and evaluation methods
7KTH RAILWAY GROUP

Track evaluation methodsParameter Common data Gröna Tåget Dynotrain
Longitudinal level zt
Tangent track, both rails
Wavelength D1: 3 – 25 m,Dx: range corresponding to Q-forces 0.4 – 20 Hz
STRIX 1-140 m Raillab 1-70 m
Assessment 99.85 % or standard deviation
Sections Length 100 – 250 m 7 (165 km/h) 33 (165 km/h)
Correlation coefficient 𝑅"# =
𝐶𝑜𝑣(𝑥, 𝑦)𝑉𝑎𝑟 𝑥 𝑉𝑎𝑟(𝑦)
8KTH RAILWAY GROUP
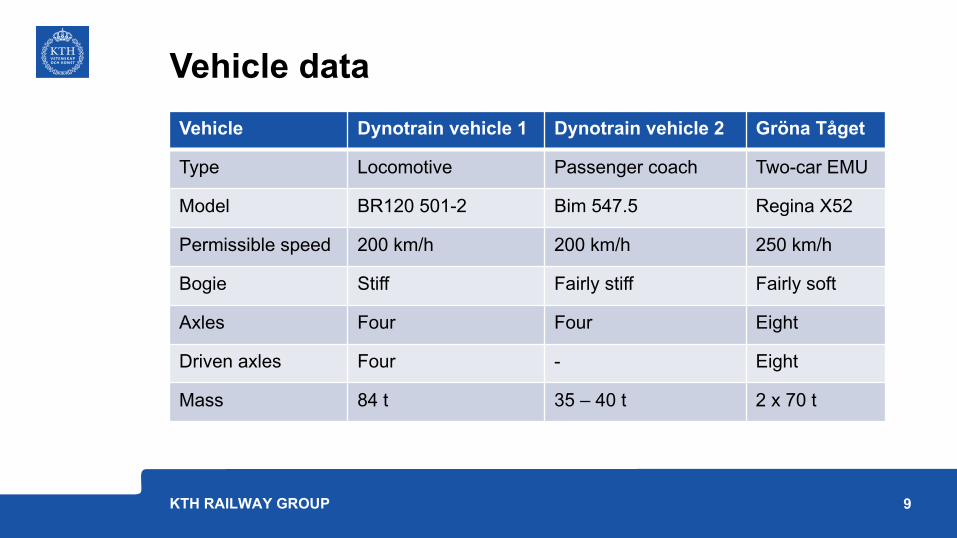
Vehicle dataVehicle Dynotrain vehicle 1 Dynotrain vehicle 2 Gröna Tåget
Type Locomotive Passenger coach Two-car EMU
Model BR120 501-2 Bim 547.5 Regina X52
Permissible speed 200 km/h 200 km/h 250 km/h
Bogie Stiff Fairly stiff Fairly soft
Axles Four Four Eight
Driven axles Four - Eight
Mass 84 t 35 – 40 t 2 x 70 t
9KTH RAILWAY GROUP
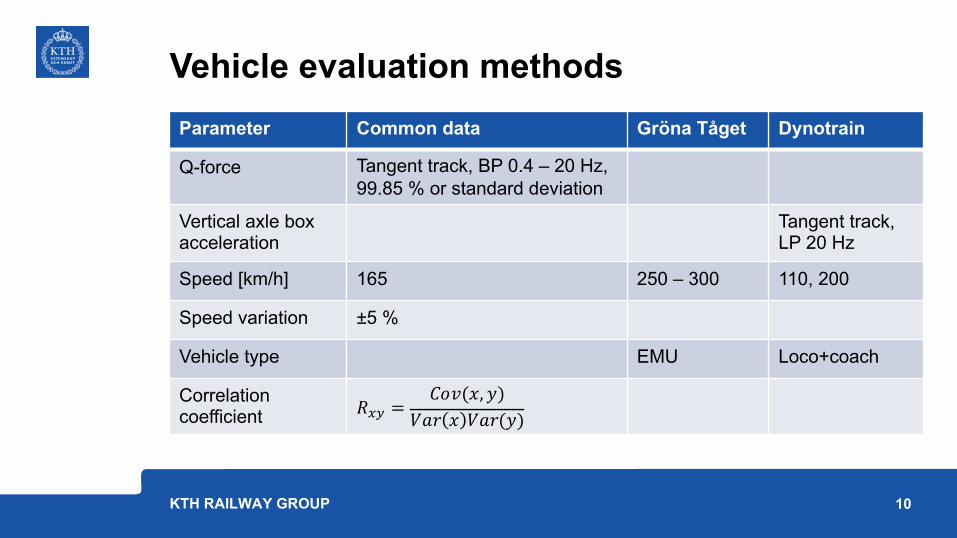
Vehicle evaluation methodsParameter Common data Gröna Tåget Dynotrain
Q-force Tangent track, BP 0.4 – 20 Hz,99.85 % or standard deviation
Vertical axle box acceleration
Tangent track, LP 20 Hz
Speed [km/h] 165 250 – 300 110, 200
Speed variation ±5 %
Vehicle type EMU Loco+coach
Correlation coefficient 𝑅"# =
𝐶𝑜𝑣(𝑥, 𝑦)𝑉𝑎𝑟 𝑥 𝑉𝑎𝑟(𝑦)
10KTH RAILWAY GROUP

z(t)m
k cv
mw zw(t)
zt(s)
s
A Fk,d Fc
Qd
Theory for irregularity–response pairs𝑄1#2 = 𝑚�� + 𝑚7��7 = 𝑚�� + 𝑚7𝑧𝑡′′𝑣:
11KTH RAILWAY GROUP
𝑄𝑑𝑦𝑛 vs 𝑧𝑡 → 𝑄𝑑𝑦𝑛vs 𝑚𝑤��𝑤 &��𝑤 vs 𝑧𝑡
→ A7B: vs 𝑧𝑡′′ &𝑧𝑡′′ vs 𝑧𝑡��𝑤 vs 𝑧𝑡

Preliminary results
12KTH RAILWAY GROUP

Preliminary results, Bim 547.5
13KTH RAILWAY GROUP

Preliminary results, Bim 547.5: 𝑄𝑑𝑦𝑛vs𝑧𝑡
14KTH RAILWAY GROUP
Always D1, unlessotherwise stated

Preliminary results: 𝑄𝑑𝑦𝑛vs𝑧𝑡
15KTH RAILWAY GROUP

Preliminary results, Regina 250: 𝑄𝑑𝑦𝑛vs𝑧𝑡
16KTH RAILWAY GROUP

Preliminary results: 𝑄𝑑𝑦𝑛vs𝑚𝑤��𝑤
17KTH RAILWAY GROUP

Preliminary results, Bim 547.5: 𝑄𝑑𝑦𝑛vs𝑚𝑤��𝑤
18KTH RAILWAY GROUP

Preliminary results: ��𝑤vs𝑧𝑡
19KTH RAILWAY GROUP

Preliminary results: A7B:vs𝑧𝑡′′
20KTH RAILWAY GROUP

Preliminary results: 𝑧𝑡′′vs𝑧𝑡
21KTH RAILWAY GROUP

Discussion
22KTH RAILWAY GROUP
𝑄𝑑𝑦𝑛 vs 𝑧𝑡
𝑄𝑑𝑦𝑛vs 𝑚𝑤��𝑤
A7B: vs 𝑧𝑡′′
𝑧𝑡′′ vs 𝑧𝑡

Conclusions and next steps
23KTH RAILWAY GROUP

Conclusions• 𝑄𝑑𝑦𝑛vs𝑧𝑡 gives often poor results• 𝑄𝑑𝑦𝑛vs𝑚𝑤��𝑤 resp. 𝑧𝑡′′vs𝑧𝑡 strongly related
• Weak link is A7B: vs𝑧𝑡EE
• More samples needed• Wavelength range Dx not generally better than D1
24KTH RAILWAY GROUP
Next steps• Increase number of samples• Identify disturbances (e.g. switches)• Effect of other irregularities than zt• Effect of track flexibility• Simulations with different models
25KTH RAILWAY GROUP

Thank you for your attention!
26KTH RAILWAY GROUP





























