Embed Size (px)
Citation preview

Kalman Filtering, Sensor Fusion, and Eye Tracking
Pramod P. KhargonekarEECS Department
UC Irvine
ECCV OpenEyes WorkshopAugust 23, 2020

Outline
• Introduction to Kalman Filtering
• Multi-sensor, multirate fusion
• Distributed/decentralized Kalman filtering
• Thoughts on potential for eye tracking

R. E. Kalman 1930-2016

Kalman Filtering: Linear System + Gaussian Noise
• Linear time-varying discrete time system, T sampling period• State variable x• Known input u (=0 for this talk)• Process noise w• Measurement noise v• We will simplify by assuming that the known input is 0
x((k + 1)T ) = A(k)x(kT ) +B(k)u(kT ) + w(kT ), x(0) = x0
y(kT ) = C(k)x(kT ) +D(k)u(kT ) + v(kT )<latexit sha1_base64="0fMFNGf94JE1XQwTC6CuD23WEAM=">AAACPHicbZBLSwMxFIUzPuv4qrp0EyyWGSplRgXdFGrrwqViX9CWkknTGibzIMnUltIf5sYf4c6VGxeKuHVtZiyi1gsJH+eeS3KPEzIqpGU9anPzC4tLy6kVfXVtfWMzvbVdE0HEManigAW84SBBGPVJVVLJSCPkBHkOI3XHLcf9+oBwQQO/IkchaXuo79MexUgqqZO+HhqGm7PNipktnBmuOTTcipkrKYoSuo3vAzg0LLMw7FgQtlr6KNayhfK3/fzbPojvTjpj5a2k4CzYU8iAaV120g+tboAjj/gSMyRE07ZC2R4jLilmZKK3IkFChF3UJ02FPvKIaI+T5SdwXyld2Au4Or6EifpzYow8IUaeo5wekjfiby8W/+s1I9k7bY+pH0aS+PjroV7EoAxgnCTsUk6wZCMFCHOq/grxDeIIS5W3rkKw/648C7XDvH2UP7w6zhRL0zhSYBfsAQPY4AQUwQW4BFWAwR14Ai/gVbvXnrU37f3LOqdNZ3bAr9I+PgEzpaXJ</latexit>
E(x0xT0 ) = P (0)
E(w(kT )wT (kT )) = Q(k)
E(v(kT )vT (kT )) = R(k)<latexit sha1_base64="fmN6q2nD9roH0/d4tdpD6uDGkes=">AAACLHicbZDLSgMxFIYzXmu9VV26CRZluikzVdCNUCwFl630Bu10yKRpG5q5kGRaS+kDufFVBHFhEbc+h5l2EG09JOTn/84hye8EjAppGDNtbX1jc2s7sZPc3ds/OEwdHdeEH3JMqthnPm84SBBGPVKVVDLSCDhBrsNI3RkUIl4fEi6o71XkOCCWi3oe7VKMpLLsVKGoP9qGWu1K5uK2pBsZ2Goli/pIH1Qyo3YlOhQo64MYDCNn+AMeFLBTaSNrzAuuCjMWaRBXyU69tjo+Dl3iScyQEE3TCKQ1QVxSzMg02QoFCRAeoB5pKukhlwhrMv/sFJ4rpwO7Plfbk3Du/p6YIFeIseuoThfJvlhmkfkfa4aye2NNqBeEknh4cVE3ZFD6MEoOdignWLKxEghzqt4KcR9xhKXKN6lCMJe/vCpquax5mc2Vr9L5uziOBDgFZ0AHJrgGeXAPSqAKMHgCL+AdzLRn7U370D4XrWtaPHMC/pT29Q2lLqEm</latexit>
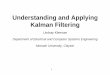
Dynamic System Model

Kalman FilterOptimal estimate of the state consists of time-update and measurement update:
Kalman gain L and estimation error covariances evolve according to:
P�1(k|k) = P�1(k|(k � 1)) + CT (k)R�1(k)C(k)
L(k) = P (k|k)CT (k)R�1(k)
P ((k + 1)|k) = A(k)P (k|k)AT (k) +Q(k)<latexit sha1_base64="Z9nIwznZGkmMVMrV7mw9qpcWrFk=">AAACaXicbVHLSgMxFM2Mrzq+WkUR3QSLMkNpmamCboTWbly4qNKq0NaSSdM2TOZBkhHKWPAb3fkDbvwJ03YQtV644dxzz83jxI0YFdK23zV9YXFpeSWzaqytb2xuZXPb9yKMOSZNHLKQP7pIEEYD0pRUMvIYcYJ8l5EH16tN+g/PhAsaBg05ikjHR4OA9ilGUlHd7Gv9KSk6Y9N78Sx4cgm/S9MrOpZVqD0lDVVadylv1VS228aNmeqnk3MqpaibpldwrHTfqiJn2mqqLdyqxTC62bxdsqcB54GTgjxIo97NvrV7IY59EkjMkBAtx45kJ0FcUszI2GjHgkQIe2hAWgoGyCeik0ydGsNjxfRgP+QqAwmn7M+JBPlCjHxXKX0kh+Jvb0L+12vFsn/RSWgQxZIEeHZQP2ZQhnBiO+xRTrBkIwUQ5lTdFeIh4ghL9TkTE5y/T54H9+WSc1oq357lK1epHRlwCI6ACRxwDirgGtRBE2Dwoa1ru9qe9qnn9H39YCbVtXRmB/wKPf8F69Gung==</latexit>
x̂((k + 1)T |k) = A(k)x̂(kT |k)x̂(kT |k) = x̂(kT |(k � 1)) + L(k)(y(kT )� C(k)x̂(kT |(k � 1)))
<latexit sha1_base64="rJJ5Jx5NvGpJmW+ZguclkPUPFI8=">AAACVHicbZFNS8MwGMfTzumcb1OPXoLD0SKOVgbqYTDdxYOHCXuDdYw0y1xo+kKSiqPuQ+pB8JN48WC6TdicDwT++T0vSf5xI0aFtKxPTc9sZDe3ctv5nd29/YPC4VFbhDHHpIVDFvKuiwRhNCAtSSUj3YgT5LuMdFyvnuY7z4QLGgZNOYlI30dPAR1RjKRCg4LnjJFMXqaG4Z3bZvPVM0vVW8Mzf7GXIug4+RVQqi5tDe/CNs3zB9VlTBQwL+qrA+YFZn5QKFplaxZwXdgLUQSLaAwK784wxLFPAokZEqJnW5HsJ4hLihmZ5p1YkAhhDz2RnpIB8onoJzNTpvBMkSEchVytQMIZXe5IkC/ExHdVpY/kWPzNpfC/XC+Wo+t+QoMoliTA84NGMYMyhKnDcEg5wZJNlECYU3VXiMeIIyzVP6Qm2H+fvC7al2W7Ur55rBRrdws7cuAEnAID2OAK1MA9aIAWwOANfGlA07QP7VvP6Nl5qa4teo7BSuj7P1fGrd0=</latexit>

Rich Heritage from Kalman
• The most important and impactful result from control theory and one of the most important from engineering
• Equivalent to Bayes theorem (under the specified conditions)
• Extensions to continuous-time, nonlinear, non-Gaussian, distributed, networked, …
• Real-time, on-line, recursive algorithms and implementations
• Computationally efficient implementations
• Applications in many fields of engineering and sciences (including machine vision)
• Huge literature

Multi-Sensor Data Fusion
• Combine data from multiple, disparate sensors to arrive at a unified estimate of the unknown system/signal
• Wide variety of techniques to address disparate challenges related to the system, the sensors, and the data characteristics: probabilistic, Dempster-Schafer, fuzzy, …
• Many application domains:
Ø Aerospace, naval, and defense applicationsØ Sensor networks, IoTØ Digital twins, manufacturing, monitoring, …Ø RoboticsØ MedicalØ Physical sciences: weather, environment, air, water, …

Kalman Filtering and Multi-Sensor Data Fusion
“Nonetheless, the Kalman filter is one of the most popular fusion methods mainly due to its simplicity, ease of implementation, and
optimality in a mean-squared error sense. It is a very well-established data fusion method whose properties are deeply studied and examined
both theoretically and in practical applications. On the other hand, similar to other least-square estimators, the Kalman filter is very
sensitive to data corrupted with outliers. Furthermore, the Kalman filteris inappropriate for applications whose error characteristics are
not readily parameterized.”
Khaleghi et al., Multisensor Data Fusion, Information Fusion (2011)

Related Techniques and Extensions
• Extended Kalman filter (EKF)
• Unscented Kalman filter (UKF)
• Particle filters (Monte-Carlo algorithms)
• Other related methods

Multi-Rate Kalman Filtering
• Setting: Multiple sensors operating at different sampling rates
• Sensor 1 sampling time T1 = NT
• Sensor 2 sampling time T2 = MT
• …
• Sensor N sampling time …
• Kalman filter equations generalize to this case quite easily although the notation can get quite complicated

Lifting Approach
Start with a discrete-time sequence z(0), z(1), … z(N), …
ZN = ZN(0) =
z(0)z(1).
.
z(N − 1)
, ZN(1) =
z(N)z(N + 1)
.
.
z(2N − 1)
, ...
A multi-rate system can be rewritten as a standard discrete-system using lifted representation for various signals
Many papers in the control systems literature on this lifting-based approaches


Distributed/Decentralized Kalman Filtering
1976 IEEE Conference on Decision and Control

Distributed Kalman Filtering and Sensor Fusion

Key Ideas
Suppose we have J different sensors described by:
y1(kT ) = C1(k)x(kT ) + v1(kT )
y2(kT ) = C2(k)x(kT ) + v2(kT )
. . .
yJ(kT ) = CJ(k)x(kT ) + vJ(kT )<latexit sha1_base64="pzrGAeRcZF6W97FgoIWpCR1Oif0=">AAACTnicbVHNS8MwHE3n15xfVY9eisOxIYy2CnoRhrvIThP2BWspaZZtYekHSTosZX+hF/Hmn+HFgyLadh3MzQeBl/fejyQvtk8JF6r6JuU2Nre2d/K7hb39g8Mj+fikw72AIdxGHvVYz4YcU+LitiCC4p7PMHRsirv2pJ743SlmnHhuS4Q+Nh04csmQIChiyZJxaGnlSatSuqsnpPKUbC6nc9EwCqGlL2x9ydYzu2TQgSd4Gmwsgo2lYCoWLLmoVtUUyjrRMlIEGZqW/GoMPBQ42BWIQs77muoLM4JMEETxrGAEHPsQTeAI92PqQgdzM0rrmCkXsTJQhh6LlyuUVF2eiKDDeejYcdKBYsxXvUT8z+sHYnhrRsT1A4FdND9oGFBFeErSrTIgDCNBw5hAxEh8VwWNIYNIxD+QlKCtPnmddPSqdlXVH6+Ltfusjjw4A+egDDRwA2rgATRBGyDwDN7BJ/iSXqQP6Vv6mUdzUjZzCv4gl/8Fdj6sZA==</latexit>
Centralized optimal solution: combine these measurements and solve the resulting KF problem:
y(kT ) =
y1(kT )y2(kT ). . .
yJ(kT )
v(kT ) =
v1(kT )v2(kT ). . .
vJ(kT )

Local Kalman Filters and Fusion of Results
• Create a Kalman Filter at each sensor and generate state estimates and covariance matrices
• Variety of algorithms for exchanging information between sensors with or without a central processor
• Analytical results on the performance of the resulting estimates and convergence to the centralized estimator
• Voluminous literature on these themes

Example: Fusion without Feedback
Hashemipour et al, 1988
P�1(k|k) = P�1(k|(k � 1)) +JX
i=1
�P�1i (k|k)� P�1
i (k|(k � 1)k)�
<latexit sha1_base64="0gRyw1RQHGLXtuvsjCzbNogglB4=">AAACSXicbVDLSgMxFM3Ud31VXboJitAiLTN1oZuC6EJxVcGq0GnHTJppw2QeJHeEMs4P+SFu3LnzH9y4UMSVaSu+6oHAuefcQ5LjxoIrMM1HIzcxOTU9MzuXn19YXFourKyeqyiRlDVoJCJ56RLFBA9ZAzgIdhlLRgJXsAvXPxz4F9dMKh6FZ9CPWSsg3ZB7nBLQklO4qrfTspUV/Ru/VMNfQ9EvW6XStq2SwEl5zcra6UlmC+YBLuK6w79DuPxzHua0aEve7QEu5fNOYdOsmEPgcWJ9ks39I3xrOzfdulN4sDsRTQIWAhVEqaZlxtBKiQROBcvydqJYTKhPuqypaUgCplrpsIkMb2mlg71I6hMCHqo/EykJlOoHrt4MCPTUX28g/uc1E/D2WikP4wRYSEcXeYnAEOFBrbjDJaMg+poQKrl+K6Y9IgkFXf6gBOvvl8fJebVi7VSqp7qNAzTCLFpHG6iILLSL9tExqqMGougOPaEX9GrcG8/Gm/E+Ws0Zn5k19Au5iQ9ZkrAq</latexit>
P�1(k|k)x̂(kT |k) = P�1(k|(k � 1))x̂(kT |(k � 1))
+JX
i=1
⇥P�1i (k|k)x̂i(kT |k)� P�1
i (k|(k � 1)k)x̂i(kT |(k � 1))⇤
<latexit sha1_base64="jEr3Zba2M9Khg+kLRIy5zeKJUdU=">AAAClXicbVFdT9swFHXCYCxjUOBhD3uxqFYVTa0ShgQvlfiYpokXOolSpCZEjuu0VpwP2TeIKuQf8Wt449/gfk1dy5UsHZ9z7r32vUEmuALbfjXMtQ/rGx83P1mft75s71R2925VmkvKOjQVqbwLiGKCJ6wDHAS7yyQjcSBYN4gux3r3gUnF0+QGRhnzYjJIeMgpAU35lef2fdFwynr0FB26QwLFo8Y3+oJrLfxPq0cN53BRnxLYdbFV++GqPPYL3nLK++KqdAULAfdw2+crpbVrXr6xaJiUW3HNm0g+GAL2LMuvVO2mPQm8CpwZqKJZtP3Ki9tPaR6zBKggSvUcOwOvIBI4Fay03FyxjNCIDFhPw4TETHnFZKol/q6ZPg5TqU8CeMIuZhQkVmoUB9oZExiqZW1Mvqf1cghPvYInWQ4sodNGYS4wpHi8ItznklEQIw0IlVy/FdMhkYSCXuR4CM7yl1fB7VHT+dk8+ntcPbuYjWMTfUMHqI4cdILO0B/URh1EjT3j1Dg3LsyvZsv8Zf6eWk1jlrOP/gvz+g0u7cLy</latexit>

Combining Estimates in a Sensor Network using Consensus Algorithms
Olfati-Saber, 2005

“The first published account of the use of a Kalman filter in the context of VR appears to be Rebo’s master’s thesis (Rebo, 1988).”
“Information and associated databases will be organized by physical location and time, allowing users to both store and retrieve past, present, and future information in the context of physical locality and direction of gaze. The Kalman filter will undoubtedly
play a role in this vision, no matter what the underlying sources of signals.”

Control theory (Kalman Filtering) is heavily based on mathematical models of the dynamics and observation
processes
Newer machine learning avoid such models and rely on data and learning algorithms
How can we combine model-based approaches with machine learning approaches?

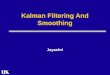
Recent Example

Rambach et al, 2016

Results
Rambach et al, 2016

Eye Tracking Issues
• Eye movements
Ø Fixations
Ø Saccades
Ø Dynamic Stimuli: Smooth Pursuits
• Pupil detection
• Tracker calibration
• Slippage or calibration drift
Santini et al 2019 Symposium on Eye TrackingResearch and Applications

Use of KF in eye tracking goes back to Sauter et al, 1991

A Few Publications in the Control Theory Literature


Control Theory has Potential to Provide Useful Tools
Main Idea: Incorporate sensor drift via a state variable in the system dynamics model and use variants of KF for estimation
“major remaining challenge hindering a wider adoption of ubiquitous eye-tracking seems to be device slippage.”

Conclusions
• Rich body of literature on Kalman filtering and myriad extensions
• Rich boy of literature on multirate, multisensory fusion leveraging KF
• Combination with newer ML techniques to leverage their strengths
• Potential for application to eye and gaze tracking problems

Thank you!
http://faculty.sites.uci.edu/khargonekar/