-
Passivity-based Control for Multi-Vehicle Systems Subject to
StringConstraints
Steffi Knorn a , Alejandro Donaire b , Juan C. Aguero b ,
Richard H. Middleton b ,aUppsala University, Sweden
bThe University of Newcastle, Australia
Abstract
In this paper, we show how heterogeneous bidirectional vehicle
strings can be modelled as port-Hamiltonian systems. Analysis of
stabilityand string stability within this framework is
straightforward and leads to a better understanding of the
underlying problem. Nonlinearlocal control and additional integral
action is introduced to design a suitable control law guaranteeing
l2 string stability of the system withrespect to bounded
disturbances.
Key words: Hamiltonian Systems, String Stability, Multi-Vehicle
Systems
1 Introduction
In the field of coordinated systems, formation control is oneof
many control objectives. A group of N vehicles (e. g.platoon or
string) is required to follow a given referencetrajectory while the
vehicles keep a prescribed distance toneighbouring vehicles. In its
simplest form the vehicles inthe platoon are considered to move in
a single straight line.While many different solutions to this
problem have beenproposed, most researchers consider a
decentralised con-trol structure where each vehicle in the string
uses a localcontroller with locally available measurements instead
of aglobal, centralised controller.
In most cases it is straightforward to design a local
controllerto achieve stability of a string in the Lyapunov sense.
How-ever, it is well known that error signals can amplify
whentravelling through the string resulting in growth of the
localerror norm with the position in the string. This effect is
re-ferred to as string instability, e.g. in [10, 14, 17], or
slinky
This paper was not presented at any IFAC meetings.
Corre-sponding author: Steffi Knorn. Tel. +46-18-4717389. Fax
+46-18-4717244.
Email addresses: [email protected] (SteffiKnorn),
[email protected] (AlejandroDonaire),
[email protected] (Juan C.
Aguero),[email protected] (Richard
H.Middleton).
effect, e.g. in [3, 6, 18, 21]. A well known definition of
lpstring stability has been proposed in [19].
Different approaches have been proposed to guarantee
stringstability of unidirectional vehicle strings, where each
localcontroller only considers information relating to a group
ofvehicles in front. These approaches include: (i) introducinga
time headway, [3]; (ii) local controllers that depend onthe
position within the string, [8]; (iii) using the velocityor the
acceleration of the lead vehicle; or, (iv) propagatingthe reference
velocity to each vehicle within the platoon,e. g. [10, 20] or [2],
respectively.
This paper studies heterogenous, bidirectional, nonlinearstrings
of vehicles. (Heterogeneous refers to the fact thatthe dynamics of
each vehicle and local controller might dif-fer between the
vehicles; and bidirectional means that in-formation propagates both
upstream and downstream in thestring.) It was shown in [1,17] that
similar to unidirectionalstrings, linear, symmetric bidirectional
strings with two in-tegrators in the open loop and constant spacing
are alwaysstring unstable. The definition used in [1,17] even
thoughoften not explicitly mentioned requires that the L2 normof
the local error vector, i. e. e()2 =
0
Nk=0 |ek(t)|2dt
is bounded for all disturbances d in L2.
Different approaches to overcome this limitation have
beenproposed. It is shown in [10] that this type of string
sta-bility can be guaranteed given a sufficiently large
coupling
Preprint submitted to Automatica July 18, 2014
-
with the leader position. In [2] a linear, bidirectional
stringof N vehicles is approximated as a PDE. It is shown thatthe
least stable eigenvalue of the PDE approaches the ori-gin with
O(1/N2) if the string is symmetric and O(1/N) ifthe string is
asymmetric. However, knowledge of the steadystate / reference
velocity is needed. Both proposed solu-tions depend on either
perfect communication between theleading vehicle and the rest of
the string or perfect knowl-edge of the reference signal. Further,
any reference signalchanges have to be communicated to every
vehicle in thestring. In case sufficiently fast and lossless
communicationof the necessary information cannot be guaranteed, it
mightnot be possible to guarantee string stability. Thus, both
con-trol structures suffer from a serious risk if the number
ofvehicles increases. Therefore, it is desirable to find
alterna-tives that do not depend on global communication or
globalreference knowledge but local measurements and local
com-munication between a small number of direct neighbours.
A different approach to ensure string stability was consid-ered
in [5]. Modelling a symmetric bidirectional string asa
mass-spring-damper system, it is shown that string stabil-ity with
constant spacing can be guaranteed if the dampingcoefficients or
the inverse compliances of the springs be-tween the vehicles,
respectively, grow with the string lengthN. This also seems
undesirable in practise. Since controllerparameters cannot be
chosen infinitely high this implies thatthe string cannot be
extended without bound.
It is the aim of this paper to offer an alternative approachto
this problem. First, the definition of lp string stabilityproposed
in [19], although very useful for unidirectionalstrings, seems
uninformative and too restrictive for bidirec-tional strings.
Recall that it has been shown that string sta-bility cannot be
achieved for linear, symmetric, bidirectionalstrings with two
integrators in the open loop, constant spac-ing and without global
communication or reference signalknowledge, [1,17], and the
alternatives suffer from undesir-bale risks and limitations above.
Thus, we first propose adefinition of lp string stability that is
less restrictive than thedefinition given in [19]. This definition
proves to be usefulin guaranteeing an upper bound for the distances
betweenthe vehicles at all times. Details can be found in the
fol-lowing section. Second, a control algorithm is proposed
thatdoes not suffer from any of the above mentioned disadvan-tages.
That is, the design does not require any global com-munication or
global knowledge of the reference informa-tion. Further, it is
possible to choose all control parametersin a defined bound without
the need to limit the number ofvehicles. We also propose a
different method to model suchvehicle strings, that is to use
port-Hamiltonian system the-ory, [11]. This approach offers
significant advantages overmethods known in the string stability
literature. The port-Hamiltonian systems description allows direct
and easy tofollow stability and string stability proofs and thus
offer abetter insight into the underlying problem. The method
alsoallows an insight on limitations and advantages of
similarsystem designs presented in the literature such as in [2,
5].Further, both linear and nonlinear systems can be described
as port-Hamiltonian systems.
The paper is organised as follows: The problem of interestin
this paper (i. e. string stability of port-Hamiltonian sys-tems
describing vehicle platoons) is presented in Section 2.After
introducing local control to a string of vehicles in Sec-tion 3,
integral action will be added in Section 4. The paperends with a
numerical example in Section 5 and concludingremarks in Section 6.
Some preliminary results have beenreported in [9].
2 Notation and Problem Formulation
2.1 Notation
The L2 vector norm is given by |x|2 = |x| =
xTx and theL2 and L vector function norms by x()2 =
0 |x(t)|2dt
and x() = supt0 |x(t)|, respectively. For a scalar func-tion
H(x) of a vector x = [x1, x2, . . . , xn]T its gradient isdefined
as H(x) =
[H(x)x1
,H(x)x2
, . . . ,H(x)xn
]T. We denote the
state, steady state and the disturbance vector by the
columnvectors (generally denoted col) x(t) = col(x1(t), . . .
,xN(t)),x0 = col(x10 , . . . ,xN0 ) and d(t) = col(d1(t), . . .
,dN(t)). Thecolumn vector of ones is denoted by 1 and ~ei is the
ithcanonical vector of length N. Similarly we denote the di-agonal
matrix A RNN with diagonal entries a1, . . .aN asA = diag(a1, . .
.aN).
2.2 System Description
We consider a system of N vehicles with mass mi wherei = 1,2, ,N
denotes the position within the string. Themotion equations of the
system can be described using themomentum and position of each
vehicle, i.e. pi and qi, asfollows
pi =Fi + di (1)qi =m1i pi (2)
where Fi is the control force on the vehicle, di is the
dis-turbance, and the momentum satisfies pi = mivi, where vi isthe
velocity. The local position error between the ith vehicleand its
direct predecessor is denoted
i = qi1 + li qi. (3)
Note that li is the desired safety distance between the
vehi-cles plus the length of vehicle i1 or i depending on
whetherthe position of the front or the rear of each vehicle i is
usedas position qi. As a minimal distance is usually required
be-tween vehicles for obvious safety reasons, we assume li >
0for all i. The position q0 is the reference position availableto
the first vehicle in the string. The dynamics of the stringsystem
described in momenta of the vehicles and separation
2
-
distance between the vehicles can be described by
p
=
0 S T
S 0
H(p,) +F
0
+
d~e1v0
, (4)
where ,p RN are the displacement and momentum vec-tors, i. e. =
col(1, . . . ,N), p = col(p1, . . . ,pN), and thecontrol force
vector is F = col(F1, . . . ,FN). The functionH(p,) is given by
H(p,) = 12
pTM1 p. (5)
The matrix M RNN is the constant and positive definiteinertia
matrix M = diag(m1, . . . ,mN). The matrix S has thebidiagonal
form
S =
1 0 01 1 . . . ...0 1 . . . . . . ......
. . .. . . 1 0
0 0 1 1
. (6)
2.3 Control Objectives
The local control objective for each vehicle is to bring
itslocal error to zero using local (distributed) control and
onlylocally available data. The control force Fi will be chosensuch
that only data from a group of neighbours of the ithvehicle (both
preceding and following vehicles) are needed.The controller for the
first vehicle in the string aims to followa given trajectory q0 and
also minimise the local positionerror towards a group of following
vehicles. In the simplestsetting the reference signal is considered
to be a ramp withconstant velocity v0, i.e. q0 = v0t. Note that the
vehicleswithin the string (apart from a limited group at the
beginningof the string) do not have access to the reference
signaland therefore have to adjust their position and
momentumindirectly by forcing their local position error to
zero.
The overall control objective is to achieve string stabilityor
scalability, that is, the norm of the local states of thecomplete
string do not grow without bound as N increasesfor nonzero
disturbances or initial conditions. Consideringthe general
definition of lp string stability in [19] and [15],we use the
following definition of l2 string stability withrespect to
disturbances:
Definition 1 Consider a system described by x = g(x,d)with
states x RN , g RN satisfying g(x,0) = 0 anddisturbances d. The
equilibrium x is l2 string stable withrespect to disturbances d(t),
if given any > 0, there exists
1() > 0 and 2() > 0 (independent of N) such that
|x(0) x| < 1() and d()2 < 2() (7)
implies
x(t) x = supt0
|x(t) x| < N 1. (8)
3 Local Control
In this section, a local distributed controller for a
bi-directional vehicle string system is designed. The localcontrol
structure is motivated by previous results in the fieldof
mechanical engineering. When choosing control actionsbetween the
vehicles that can be modelled as virtual springsand dampers between
the vehicles, the overall system caneasily be written as a
port-Hamiltonian system.
The control forces consist of the spring forces Fsi , that
de-pend on the position errors i, the damper forces Fri ,
thatdepend on the velocity differences between two neighbour-ing
vehicles, and the drag forces Fdi describing the fric-tion of the
vehicles towards the ground. Assume the springforce between vehicle
i 1 and i is given by the functionf si (i), which is locally
Lipschitz for alli within the domainof definition, strictly
monotonic and satisfies f si (i)i 0and f si (i) = 0 only for i = 0
for all i = 1, . . . ,N. Thus,Fs = S T f s() where f s() is the
column vector with entriesf si (i). Also assume that the condomian
or target set of f sicovers the complete real axis between and .
Thus, thefunction f si is invertible and f s
1i is its inverse. The vector of
inverses is denoted by f s1 .
Remark 2 Note that nonlinear springs yield some signifi-cant
advantages over linear spring models: First, one coulduse barrier
functions on the potential energy to prevent col-lisions between
the vehicles in the platoon. To do this, thestiffness of the
springs have to increase when the distancesbetween vehicles
decrease. For instance a good choice isto design the springs such
that f si (i) as i li.Thus, in case the spatial error between the
desired distanceand the actual distance between the vehicles
approaches liwhich corresponds to the distance between the vehicles
ap-proaching 0, the spring gets infinitely stiff to prevent a
crash.Second, contrary to the linear controllers, where the
controlaction is proportional to the error, nonlinear controller
al-lows a large variety of possibilities to achieve the
specifiedbehaviour. For example, nonlinear springs allow to
boundthe control input when the position error is large, which
isimpossible using linear controllers. Note that in case f si isnot
defined for all i, for instance for barrier functions, thestability
analysis should ensure that the initial conditionsare chosen such
that f si (i(0)) exists and that the trajecto-ries of the system
remain within the set of interest.
Assuming linear damping forces of the form Fri =
3
-
Ri(m1i1 pi1 m1i pi) and linear drag forces of the formFdi =
bim1i pi, the overall control force can be described as
F = (B + R)M1 p + ~e1R1v0 + S T f s() (9)
with the constant matrices
R =
R1 + R2 R2 0 0R2 R2 + R3 R3
. . ....
0. . .
. . .. . . 0
.... . . RN1 + RN RN
0 0 RN RN
(10)
and B = diag(b1, . . . ,bN) where the entries of matrices B andR
are design parameters of the controller and 0 < Ri,bi < for
all i.
We will show that the system is asymptotically stable
withrespect to the equilibrium (p,). However, the values ofthe
displacements in steady state are undesirable and growwith the
string length N in presence of a nonzero referencevelocity v0.
Lemma 3 Consider the string system (4) in closed loopwith the
control law (9) and where the initial spatial devi-ation i(0), the
equilibrium state i and all values of i inbetween are in the domain
of definition of f si (i) for all i.Consider further that f si (i)
is a strictly monotonically in-creasing function satisfying f si
(0) = 0. Then, the equilibrium(p,) =
(M1v0, f s1
(S TB1v0
))is globally asymptotically
stable in the absence of disturbances, i.e. d = 0.
PROOF. Given (9) and (4) the closed loop has the
port-Hamiltonian form
p
=(B + R) S
T
S 0
Hcl(p,) (11)
with the closed-loop Hamiltonian function
Hcl(p,) =12(p M1v0)TM1(p M1v0)
+
Ni=1
ii
f si (w) N
k=ibkv0
dw (12)
whereN
k=i bkv0 is the ith entry of the vector S TB1v0. Notethat the
second right hand term in (12) is non-negative.The nonlinear spring
functions f si (i) are strictly mono-tonically increasing and
satisfy f si (0) = 0. Also note thatf s() = S T B1v0. Adding the
term Nk=i bkv0 ensures that
the integrand is positive for i > i which leads to the
in-tegral being positive. In case i < i the integrand is
neg-ative, which leads to the integral from to being alsopositive.
Hence, the integral is non-negative and only equalto zero for i = i
.
Using Hcl as a Lyapunov function candidate and computingits time
derivatives yields
Hcl(p,) = THcl(p,)(B + R) S TS 0
Hcl(p,)= Tp Hcl(p,)(B + R)pHcl(p,) 0 (13)
This implies Lyapunov stability. Note also that this impliesthat
the spatial deviation i remains in the definition set off si (i) if
the initial spatial deviation i(0), the equilibriumstate i and all
values of i in between are in the domainof definition of f si (i)
for all i. Asymptotic stability followsby applying the Invariance
principle, which ensures that thetrajectories of the states
converge to the largest invariant setS, i.e. limt p(t) = p and limt
(t) = such thatHcl(p,) = 0, (see e.g. [7]).
Note that 1 = f s1
1
(Nk=1 bkv0
). Thus, for positive parame-
ters bi the steady state values of the spatial separation
be-tween the vehicles is non-zero. Moreover, if a positive
lowerbound on the drag and compliance coefficients exists, i.
e.mini bi > b > 0 and mini ci > c > 0, the argument of
f s11grows with N. Depending on the form of f s1 , might
growwithout bound at the beginning of the string. In any case, is
not a desired equilibrium point. This effect could beavoided by
choosing parameters bi that decrease sufficientlyfast with i. Note
that there are examples in the literature,where string stability
can be guaranteed if control param-eters grow with the position.
(Such as growing Ri in [5].)However, this implies that such a
vehicle string might notbe scalable in practice and is therefore
undesirable. Anotheroption is to assume that each agent has perfect
knowledgeof the reference signal (in its simplest case the
referencevelocity as discussed in [2]) and to use this knowledge
tocompensate the influence of the drag onto the steady
state.However, this requires the communication of any changesin the
reference signal to all agents.
4 Integral Action
Studying a bidirectional vehicle string in the previous sec-tion
showed that introducing local control based on a mass-spring-damper
system can guarantee stability of an equilib-rium point which is
not the desired equilibrium. Thus, inte-gral action will be
introduced in this section to ensure stringstability of the desired
equilibrium. Also, it will be shownthat using suitable integral
action allows to reject constant
4
-
unknown disturbances. The following theorem studies sucha
controller with additional integral action.
Theorem 4 Assume the disturbances d include a constantcomponent
dc and a dynamical component dd(t) such thatd = dc + dd(t) and
there exists a constant D < satisfyingdd()2 D. Consider the
string system (4) with a referencesignal with constant velocity v0,
disturbance d in closed loopwith a controller obtained by adding
the control in Lemma 3and the additional dynamic control force FIA,
i. e.
F = (B + R)M1 p + ~e1R1v0 + S T f s() + FIA (14)FIA = ApM1 p +
MKS T f s() (B + R + Ap)Kz3 (15)
z3 = S T f s(). (16)
where Ap is a constant diagonal matrix Ap = diag(ap1 , . . .
,apN )with 0 api < for all i, K RNN is a constant
diagonalpositive matrix K = diag(k1, . . . ,kN) with 0 < ki <
forall i. Then
(1) for dd(t) = 0 the desired equilibrium point
(p,,z3) =(M1v0,0,K1(B + R + Ap)1
(dc
(B + Ap
)1v0
))(17)
is globally asymptotically stable (despite the presenceof
constant unknown disturbances dc),
(2) the system is passive with input dd, output y = z1 Hz(z)and
storage function Hz(z) and constant disturbancesdc are rejected,
and
(3) the system is l2 string stable with respect to the
dynamicdisturbances dd(t).
PROOF. (1): Consider the following change of coordinates
z1 =p M1v0 + MK(z3 ), (18)z2 = (19)
with = K1(B + R + Ap)1(dc
(B + Ap
)1v0
). Hence,
z1 =S T f s() RM1 p + ~e1R1v0 BM1 p + d ApM1 p+MKS T f s() (B +
R + Ap)Kz3 MKS T f s()
= (B + R + Ap)M1z1 + S T f s() (20)
and
z2 = S M1(p M1v0) = S M1z1 + S K(z3 ).
Thus, the closed loop dynamics have the port Hamiltonianform
z1
z2
z3
=
(B + R + Ap) S T 0
S 0 S0 S T 0
Hz(z) (21)
with the Hamiltonian function
Hz(z1,z2,z3) = 12zT1 M
1z1 +N
i=1
z2i0
f si (w)dw
+12
(z3 )TK(z3 ). (22)
Note that it can be shown in a similar way as below (12)
thatHz(z) is anon-negative function. As the spring functions f
siare strictly monotonically increasing and satisfy f si (0) = 0the
integrand of the second right hand term in (22) is positivefor z2i
> 0 and negative for z2i > 0. Hence, the integral
isnon-negative and only equal to zero for z2i = 0. It can beshown
in a similar way as in the proof of Lemma 3 that thesystem is
asymptotically stable by using the Hamiltonianas a Lyapunov
function and considering that B + R + Ap ispositive definite.
(2): Note that with constant disturbances dc and
additionaldynamic disturbances dd(t) the system description
changesto
z1
z2
z3
=
(B + R + Ap) S T 0
S 0 S0 S T 0
Hz(z) +
dd(t)
00
. (23)
with Hz(z) given in (22). Using Hz(z) as a Lyapunov func-tion
candidate, taking its derivative and setting y = z1 Hz(z)yields
Hz(z) min(B + R + Ap)|y|2 + yTdd(t). (24)
As B+R+Ap is positive definite, the system is passive, [12].
(3): Extending the argument in (24) leads to
Hz(z) min(B + R + Ap)
2|y|2 + 1
2min(B + R + Ap) |dd(t)|2
min(B + R + Ap)2
y 1
min(B + R + Ap)dd(t)2
12min(B + R + Ap) |dd(t)|
2. (25)
Hence,
Hz(z(t)) Hz(z(0)) + 12min(B + R + Ap) dd()2. (26)
5
-
Note that since R is positive semidefinite and B is
positivedefinite, it can be shown using Gershgorins Theorem
thatmin(B + R + Ap) mini(bi + api ). Thus,
Hz(z(t)) (2 min
i(mi)
)1|z1(0)|2 +
Ni=1
z2i (0)0
f si (w)dw
+maxi ki
2|z3(0) |2 +
(2 min
i
(bi + api
))1d()2
(2 min
i(mi)
)1|z1(0)|2 +
Ni=1
Li|z2i (0)|2
+maxi ki
2|z3(0) |2 +
(2 min
i
(bi + api
))1d()2
(27)
where Li is the Lipschitz constant for f si (w) for w
[0,z2i(0)].(Since f si is monotonically increasing, it is
equivalent torequire that for every w = w there exists a constant c
suchthat f si (w) = cw.) Since the mass mi, the drag coefficient
biand the integral action control parameters api and ki for
eachvehicle are positive, Hz(z) is bounded for all N if |z(0)|
andd()2 do not increase with N. Given the terms including z1and z3
in (22) are quadratic and f si is strictly monotonicallyincreasing,
an upper bound on Hz(z) implies that the states zare also bounded.
Further, note that = z2 and p is a linearcombination of z1 and z3
plus two constant offsets terms.Hence, p and are also bounded if an
upper bound for Hz(z)exists. Therefore, the system is string
stable.
Note that the integral action introduces more design param-eters
in the controller by adding the matrices Ap and K inthe control
law.
Remark 5 The procedure to design the integral action fol-lows
ideas proposed in [4,13,16]. The change of coordinates(18)-(19) is
fundamental for this design. The procedure is asfollows: First,
extend the state vector by adding new statesz3, and choose their
dynamics to be driven by the displace-ments . This will result in
integral action on the displace-ments. Second, choose the change of
coordinates (19) topreserve the variables on which the additional
integral ac-tion is required. Third, compute the derivative with
respectto time of (19), and replace the derivative of the states
bytheir state equations from the open loop system and desiredclosed
loop. Then solve this equation for z1 to obtain thechange of
coordinate (18). Finally, compute the time deriva-tive of (18),
replace the derivative of the state by their cor-responding state
equations, and solve the resulting equationfor the control law FIA.
The block-matrices and functions ofthe closed loop (21) have to be
chosen to satisfy the limitedinformation available in each vehicle,
to guarantee stringstability and to ensure that the control law
does not dependon the unknown disturbance.
N = 10
Velo
city
v i(t)
Time t0 100 200 300 400 500
29.5
30
30.5
31
31.5
32
32.5
33
33.5
34
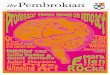
Figure 1. Velocities vi over time for a string of 10 vehicles
fori = 1 (red) ... i = 10 (purple)
N = 10
Dist
ance
i(t
)
Time t0 100 200 300 400 500
4
2
0
2
4
6
8
10
Figure 2. Displacements i over time for a string of 10
vehiclesfor i = 1 (red) ... i = 10 (purple)
5 Example
Ten homogeneous strings of length N = 10, 20, . . . ,100
withlocal control and integral action control (mi = 1, f si (i) =i
+ 0.12i , bi = 0.1, ri = 20 and Ki = 100 for all i =1,2, . . . ,N)
have been simulated. Nonzero initial conditionsfor p and have been
used for the first vehicle in the string.Figures 1-4 show the
evolution of the velocities and inter-vehicle distances for a
string of 10 and 100 vehicles. Itcan be observed that the
disturbance is not amplified whentraveling through the longer
string. Instead, all deviationsfrom the steady state values remain
bounded independentlyof the string size and the position within the
string.
In a second set of simulations, ten heterogeneous strings
oflength N = 10, 20, . . . ,100 with local control and
integralaction control have been simulated. The parameters
werechosen randomly in the ranges mi [0.8,1.2], f si (i) = cii+
6
-
N = 100Ve
loci
tyv i
(t)
Time t0 100 200 300 400 500
29.5
30
30.5
31
31.5
32
32.5
33
33.5
34
Figure 3. Velocities vi over time for a string of 100 vehicles
fori = 1 (red) ... i = 100 (purple)
N = 100
Dist
ance
i(t
)
Time t0 100 200 300 400 500
4
2
0
2
4
6
8
10
Figure 4. Displacements i over time for a string of 100
vehiclesfor i = 1 (red) ... i = 100 (purple)
0.12i with ci [0.8,1.2], bi [0.08,0.12], ri [18,22]for all i =
1,2, . . . ,N. The maximal point wise norm of thecomplete state
vector z(t), i.e. maxt |z(t)|, for all string sizesis shown for the
homogeneous strings in Figure 5 and forthe heterogeneous strings in
Figure 6. One can observe thatthe maximal deviation from the steady
state value does notgrow with string size but instead settles on a
constant valuefor N 40 for the set of homogeneous strings. As
thesystem parameters of the heterogeneous strings are
chosenrandomly in a range around the nominal value used in
thehomogeneous setting, the values of maxt |z(t)| differ and donot
settle on a constant value for sufficiently long strings.However,
it can be observed in Figure 6 that despite thevariation in maxt
|z(t)|, the values are around the same valueas for the set of
homogeneous strings and remain boundedindependently of the string
size N.
max
t|z(
t)|
N10 20 30 40 50 60 70 80 90 100113.9
114
114.1
114.2
Figure 5. Velocities vi over time for a string of 100
vehicles
max
t|z(
t)|
N10 20 30 40 50 60 70 80 90 100110
112
114
116
118
Figure 6. Displacements i over time for a string of 100
vehicles
6 Conclusions
Modelling bidirectional, heterogeneous vehicle strings
asport-Hamiltonian systems offers significant advantages
overtraditional system descriptions involving ordinary
differen-tial equations. It was shown that this system description
notonly incorporates both linear and nonlinear systems, but
alsoleads to an easy to follow and straightforward stability
andstring stability analysis.
The local control law proposed in this paper consists of
vir-tual nonlinear springs and dampers between the vehicles anddrag
towards ground. Suitable integral action control wasadded to
guarantee string stability. The advantage of this ap-proach is that
it only relies on decentralised control and lo-cally measurable
data of a set of direct neighbours. No globalcommunication with the
leading vehicle or global knowl-edge of the reference signal are
necessary and all controlparameters can be chosen in defined bounds
independent ofthe string size.
It has been shown in [17] that the common strict form ofstring
stability (requiring the l2 of all states to be boundedfor any l2
bounded disturbance) cannot be achieved for sym-metric homogeneous
bidirectional strings with tight spacingand two poles in the open
loop of each vehicle in the string.Thus, a different more
informative definition has been used.The definition proves to be
useful to guarantee point wise(in time) bounded states in
bidirectional vehicle strings.
So far only nonlinear springs have been investigated in
thiswork. A more detailed analysis is necessary to study nonlin-ear
dampers, drag or more general nonlinear systems. At thecurrent
stage the port-Hamiltonian description based stabil-ity analysis is
only suitable to cover symmetric communi-cation settings. If the
virtual springs and dampers betweentwo agents are modified to allow
for unbalanced forces attheir ends, an extension of the existing
approach is needed.
The local data such as the distances and velocity
differencestowards neighbouring vehicles are assumed to be
available
7
-
without noise, delay or other real world inaccuracies. A
moredetailed analysis is needed to investigate the effects of
com-munication or measurement limitations on string stability.
References
[1] P. Barooah and J. P. Hespanha. Error Amplification and
DisturbancePropagation in Vehicle Strings with Decentralized Linear
Control. InProceedings of the 44th IEEE Conference on Decision and
Control,and the European Control Conference 2005, pages 49644969,
2005.
[2] P. Barooah, P. G. Mehta, and J. P. Hespanha.
Mistuning-BasedControl Design to Improve Closed-Loop Stability of
VehicularPlatoons. IEEE Transactions on Automatic Control,
54(9):2100 2113, 2009.
[3] C. Chien and P. A. Ioannou. Automatic Vehicle Following.
InProceedings of the American Control Conference, pages
17481752,1992.
[4] A. Donaire and S. Junco. On the addition of integral action
to port-controlled hamiltonian systems. Automatica, 45:19101916,
2009.
[5] J. Eyre, D. Yanakiev, and I. Kanellakopoulos. A
SimplifiedFramework for String Stability Analysis of Automated
Vehicles.Vehicle Systems Dynamic, 30(5):375405, November 1998.
[6] P. A. Ioannou and C. C. Chien. Autonomuos Intelligent
CruiseControl. IEEE Transactions on Vehicular Technology,
42(4):657672, 1993.
[7] H. K. Khalil. Nonlinear Systems. Prentice Hall, third
edition, 2001.[8] M. E. Khatir and E. J. Davison. Decentralized
Control of a Large
Platoon of Vehicles Using Non-Identical Controllers. In
Proceedingsof the 2004 American Control Conference, pages 27692776,
July2004.
[9] S. Knorn, A. Donaire, J.C. Aguero, and R. H. Middleton.
Energy-based control of bidirectional vehicle strings. In
Proceedings of the3rd Australian Control Conference (AUCC), pages
251256, 2013.
[10] I. Lestas and G. Vinnicombe. Scalability in Heterogeneous
VehiclePlatoons. In Proceedings of the 2007 American Control
Conference,pages 46784683, July 2007.
[11] R. Ortega and E. Garcia-Canseco. Interconnection and
dampingassignment passivity-based control: A survey. European
Journal ofControl, 10:432450, 2004.
[12] R. Ortega, A. Loria, P. Nicklasson, and H. Sira-Ramirez.
Passivity-based Control of Euler-Lagrange Systems: mechanical,
electricaland electromechanical applications. Communications and
ControlEngineering. Springer Verlag, London, 1998.
[13] R. Ortega and J.G. Romero. Robust integral control of
port-hamiltonian systems: The case of non-passive outputs
withunmatched disturbancesase. Systems & Control Letters,
61:1117,2012.
[14] L. E. Peppard. String Stability of Relative-Motion PID
VehicleControl Systems. IEEE Transactions on Automatic
Control,19(5):579581, October 1974.
[15] J. A. Rogge and D. Aeyels. Vehicle platoons through ring
coupling.IEEE Transactions on Automatic Control, 53(6):13791377,
July2008.
[16] J. G. Romero, A. Donaire, and R. Ortega. Robustifying
energyshaping control of mechanical systems. System & Control
Letters,62(9):770780, 2013.
[17] P. Seiler, A. Pant, and J. K. Hedrick. Disturbance
Propagationin Vehicle Strings. IEEE Transactions on Automatic
Control,49(10):18351841, 2004.
[18] S. S. Stankovic, M. J. Stanojevic, and Siljak D. D.
DecentralizedOverlapping Control of a Platoon of Vehicles. IEEE
Transactionson Control Systems Technology, 8(5):816832, September
2000.
[19] D. Swaroop and J. K. Hedrick. String Stability of
InterconnectedSystems. IEEE Transactions on Automatic Control,
41(3):349357,1996.
[20] D. Swaroop, J. K. Hedrick, C. C. Chien, and P. A. Ioannou.A
Comparison of Spacing and Headway Control Laws forAutomatically
Controlled Vehicles. Vehicle Systems Dynamic,23(1):597625, January
1994.
[21] Y. Zhang, E. B. Kosmatopoulos, P. A. Ioannou, and C.
C.Chien. Autonomous Intelligent Cruise Control Using Front andBack
Information for Tight Vehicle Following Maneuvers. IEEETransactions
on Vehicular Technology, 48(1):319328, January 1999.
8