Embed Size (px)
Citation preview
Josh ChaoFrancis Fernandes Denny LieJackson Tanis
April 20th 2009
Georgia Institute of TechnologyCollege of EngineeringSchool of Electrical and Computer Engineering
Problems• CompactLogix L43 supports up to 4 axes• CompactLogix L45 supporting up to 8 axes could not be obtainedSolutionNI PCI-7356 Controller was used instead
Core of projectInterfacing PUMA motors with a PC-based controller
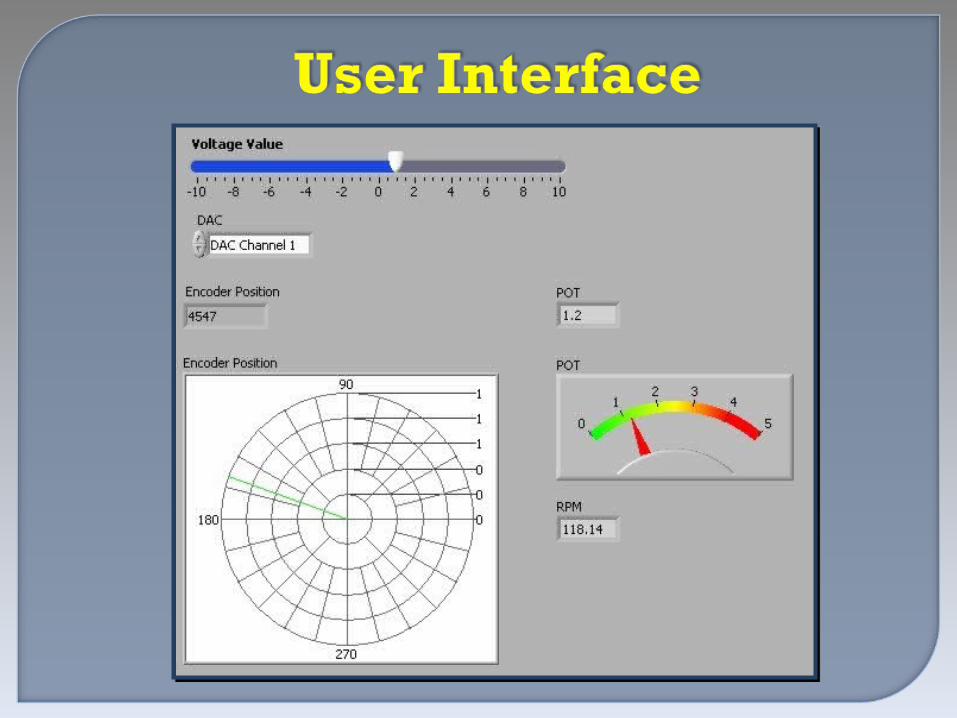
• Interface the motor and control systemInterface the motor and control system• Control the motor’s position and speedControl the motor’s position and speed• Provide GUI tracking motor’s movementProvide GUI tracking motor’s movement• Establish groundwork for future ECE Establish groundwork for future ECE projectproject
• Control motor’s movement with loadControl motor’s movement with load• Control multiple axes simultaneouslyControl multiple axes simultaneously
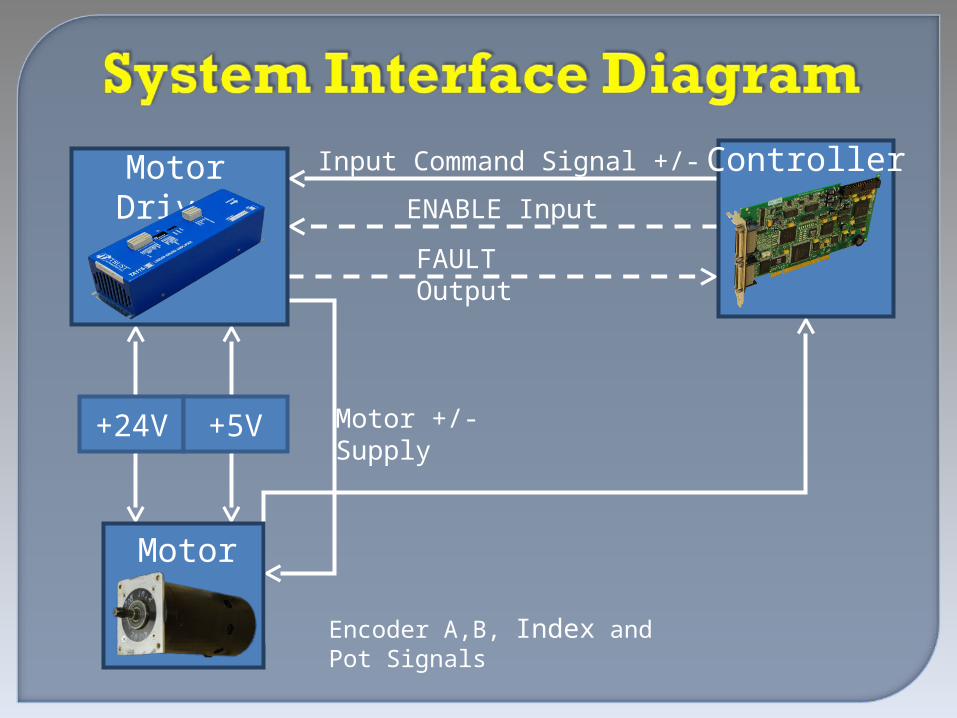
Motor Driver
Controller
Motor
+24V
+5V
Input Command Signal +/-
Motor +/-Supply
Encoder A,B, Index and Pot Signals
ENABLE Input
FAULT Output
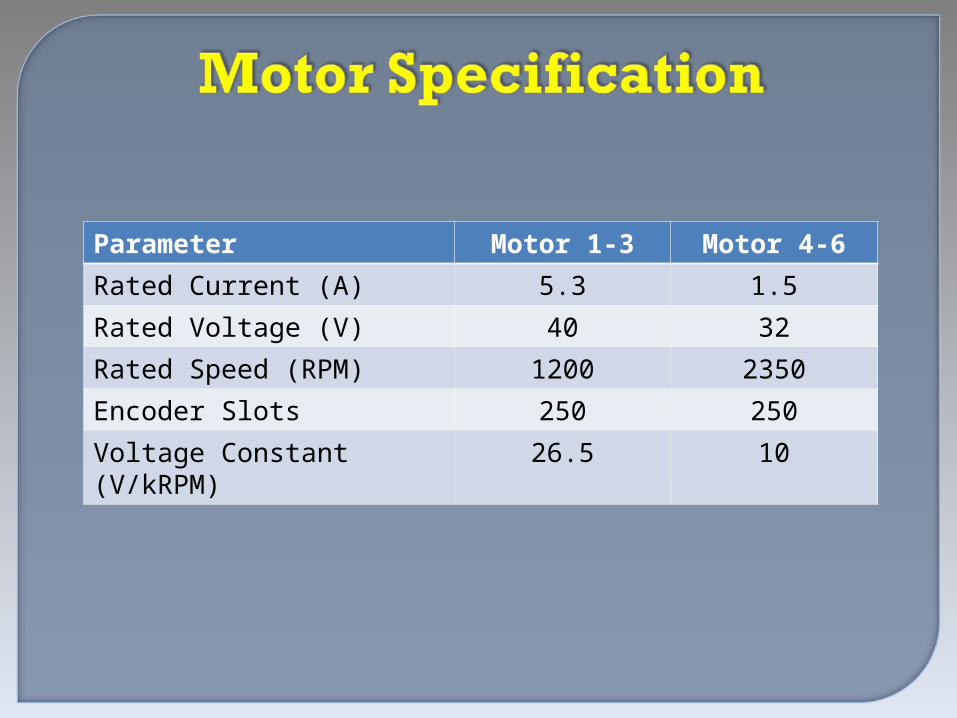
Parameter Motor 1-3 Motor 4-6
Rated Current (A) 5.3 1.5
Rated Voltage (V) 40 32
Rated Speed (RPM) 1200 2350
Encoder Slots 250 250
Voltage Constant (V/kRPM)
26.5 10
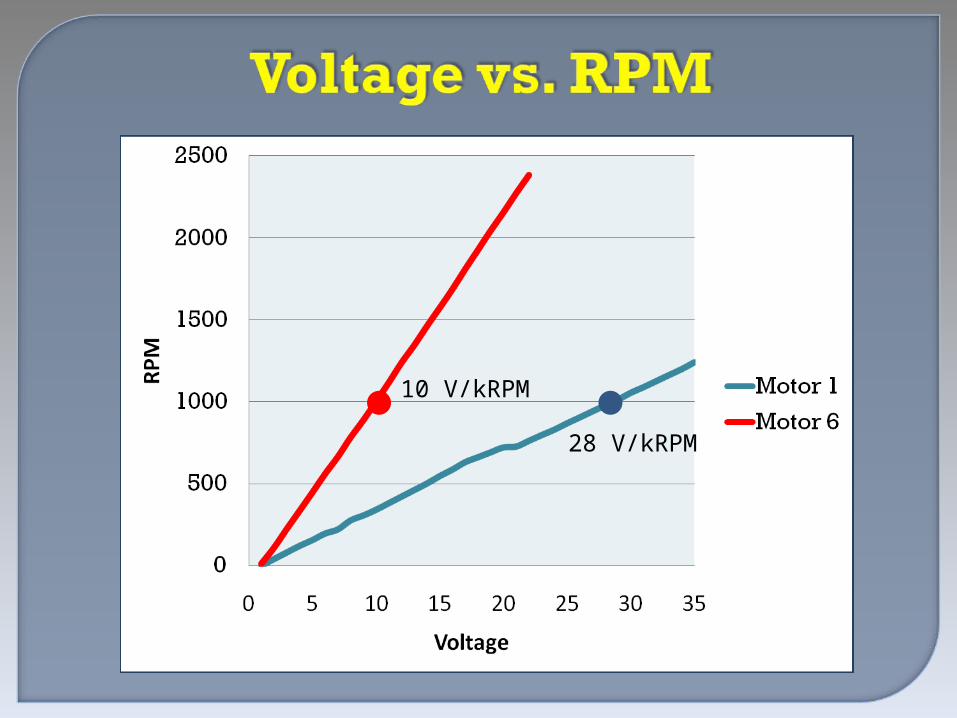
10 V/kRPM
28 V/kRPM
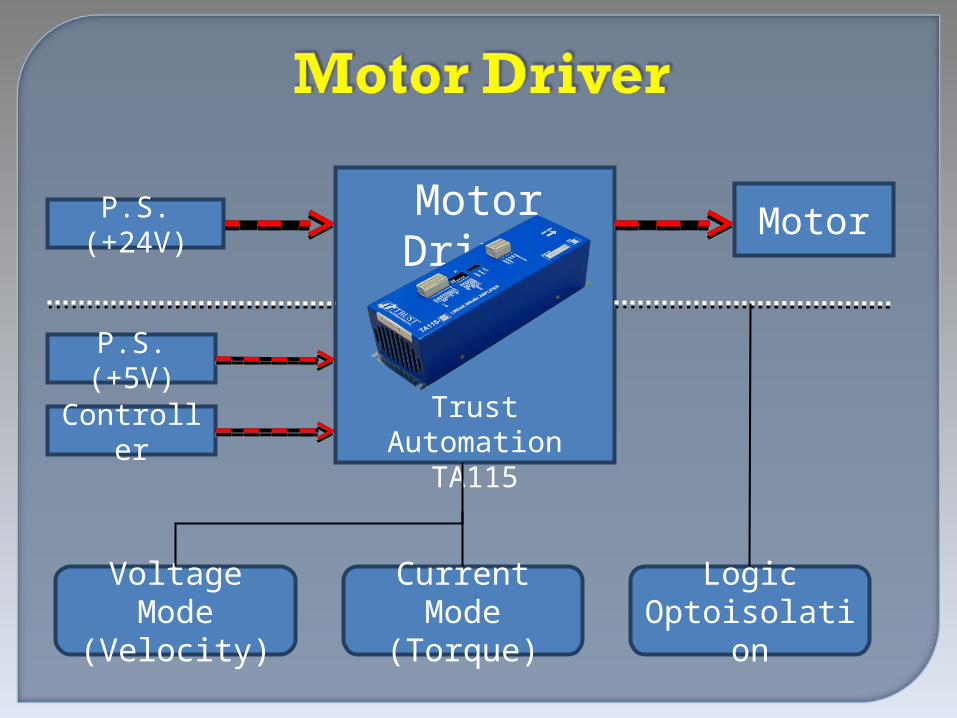
Controller
MotorMotor Driver
P.S. (+5V)
Trust AutomationTA115
Voltage Mode
(Velocity)
Current Mode
(Torque)
LogicOptoisolation
P.S. (+24V)
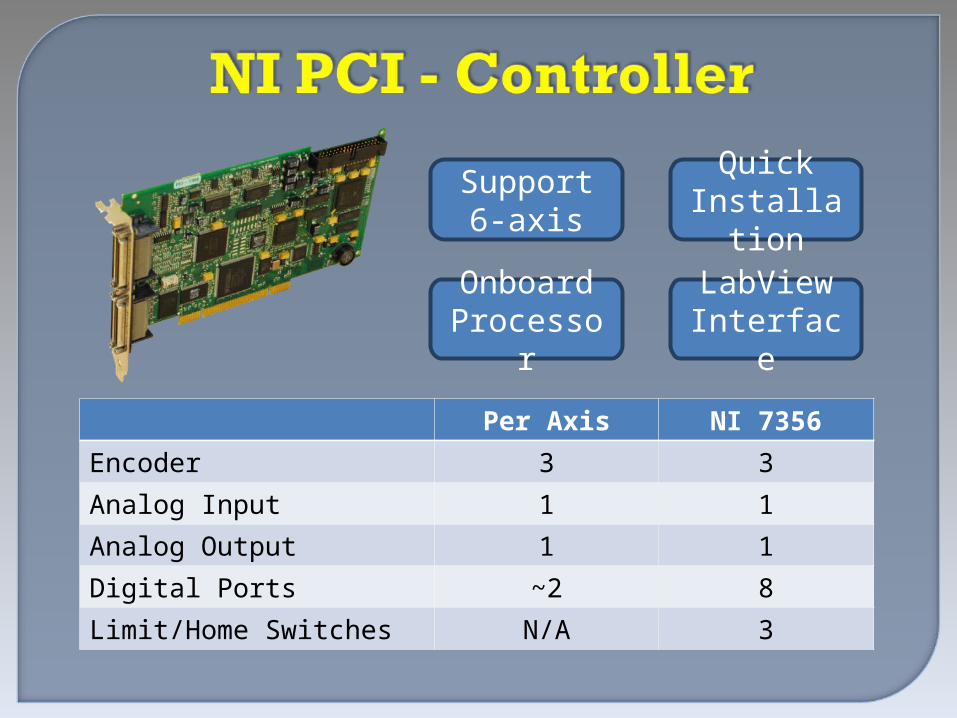
Quick Installatio
n
Onboard Processor
Support6-axis
LabViewInterface
Per Axis NI 7356
Encoder 3 3
Analog Input 1 1
Analog Output 1 1
Digital Ports ~2 8
Limit/Home Switches N/A 3
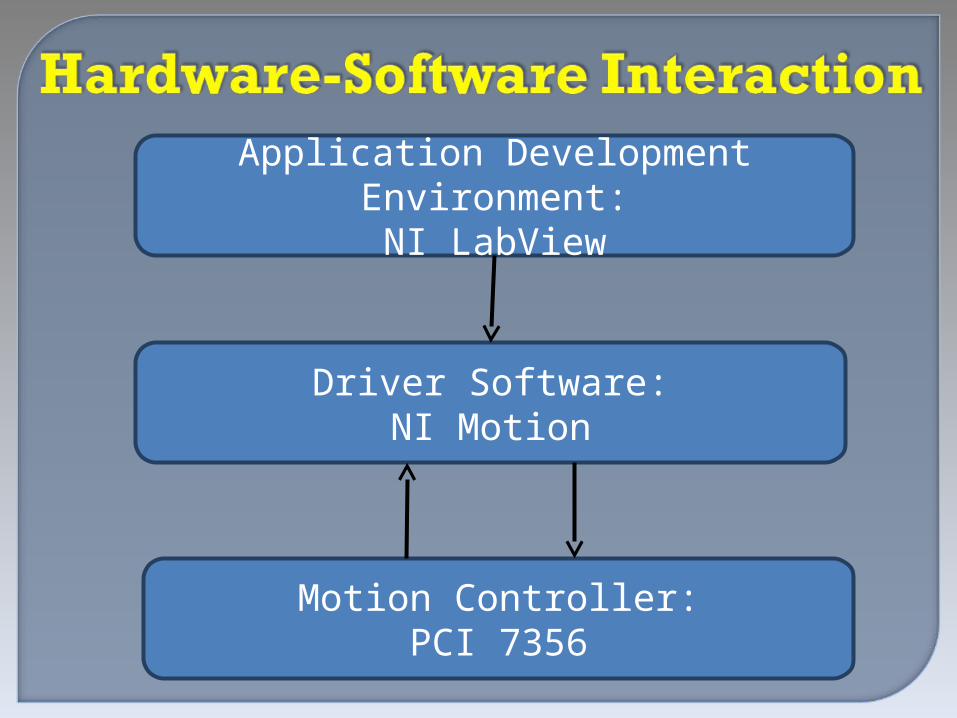
Application Development Environment:NI LabView
Driver Software:NI Motion
Motion Controller:PCI 7356
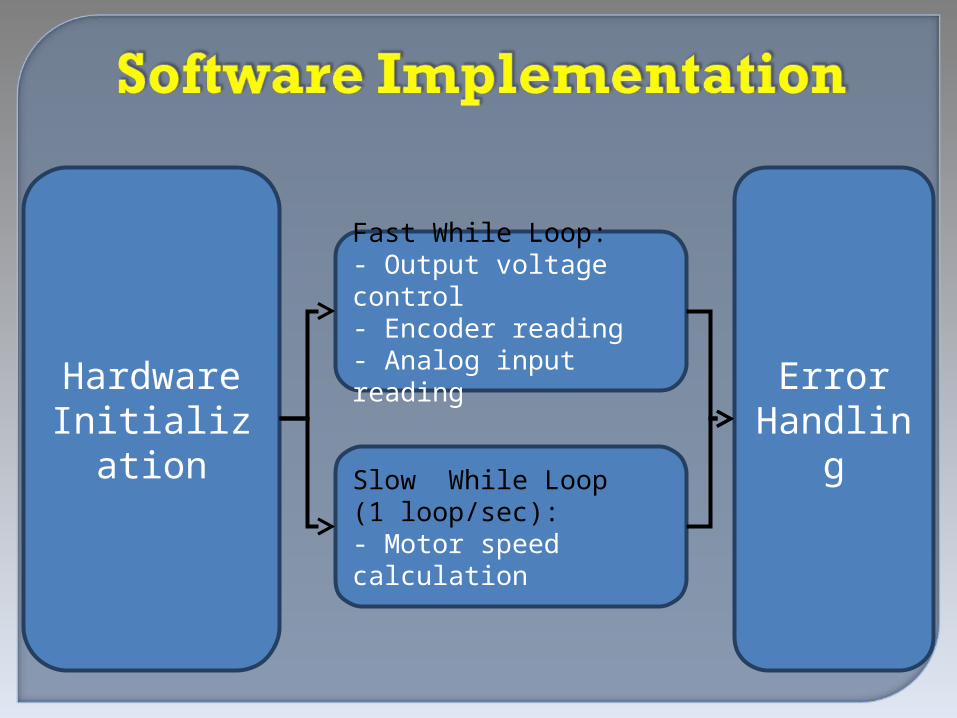
HardwareInitializatio
n
Fast While Loop:- Output voltage control- Encoder reading- Analog input reading
Slow While Loop (1 loop/sec):- Motor speed calculation
ErrorHandlin
g
Motor Movemen
t
Home Position
Calibration
Parameter Display
When: April 28th at 5:00 pmWhere: Room 113 in Van Leer
• Delay in Parts DeliveryDelay in Parts Delivery• From Rockwell to NIFrom Rockwell to NI• New Cables and Breakout BoardsNew Cables and Breakout Boards• Connector for Motors 1-3Connector for Motors 1-3• Encoder IndexEncoder Index
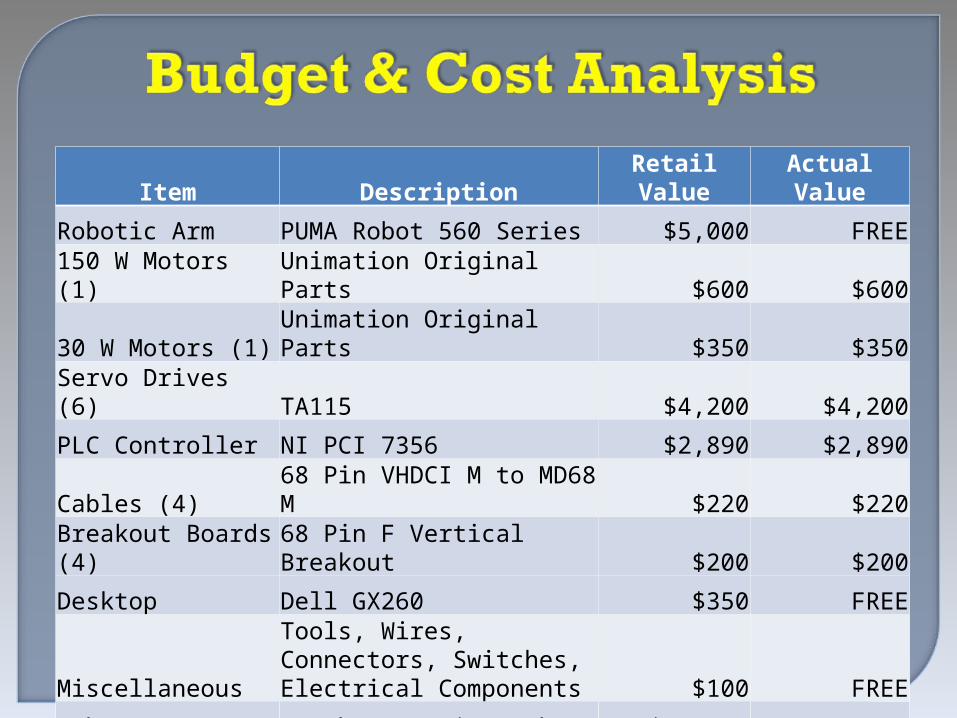
Item DescriptionRetail Value
Actual Value
Robotic Arm PUMA Robot 560 Series $5,000 FREE150 W Motors (1) Unimation Original Parts $600 $60030 W Motors (1) Unimation Original Parts $350 $350Servo Drives (6) TA115 $4,200 $4,200PLC Controller NI PCI 7356 $2,890 $2,890
Cables (4)68 Pin VHDCI M to MD68 M $220 $220
Breakout Boards (4) 68 Pin F Vertical Breakout $200 $200Desktop Dell GX260 $350 FREE
Miscellaneous
Tools, Wires, Connectors, Switches, Electrical Components $100 FREE
Labor 600 hours x $50 / hour $30,000 FREETotal $43,910 $8,460
• Wire and Interface all 6 Motors• Change Program to Control all 6 Axis• Add Limit Switches Software Side
• Install Motors into the Robot• Build Closed Loop PID Control System• Program Forward and Inverse Kinematics
TEAMTEAMYELLOW YELLOW PUMAPUMA
TEAMTEAMYELLOW YELLOW PUMAPUMA



















![[Richard denny] communicate_to_win](https://img.pdfslide.us/doc/110x75/559cbddd1a28ab76268b46ae/richard-denny-communicatetowin.jpg)







