Embed Size (px)
Citation preview

1
Analysis and Computation of Navier-Stokes equation inbounded domains
Jian-Guo Liu
Department of Physics and Department of Mathematics
Duke University
with
Jie Liu (National University of Singapore)
Bob Pego (Carnegie Mellon)

2
Outline:
• The Laplace-Leray commutator and Stokes pressure
• A formula/decomposition for Navier-Stokes pressure
• Extended/unconstrained NSE
• Estimate for the Laplace-Leray commutator
• Analysis and numerical analysis for (extended) NSE
• Finite element method with equal order polynomials
• Stable third order time-split/projection methods
• Numerics: stability accuracy check, driven cavity, backward-facing
step, flow past cylinder

3
Navier-Stokes equations for incompressible flow
ut + u · ∇u +∇p = ν∆u + f in Ω momentum
∇ · u = 0 in Ω incompressibility
u = 0 on ∂Ω = Γ no slip
Ways to regard and treat pressure:
(i) Pressure is like a Lagrange multiplier to enforce incompressibility
(ii) Pressure can be ‘eliminated’ by projection on divergence-free fields
or taking curl to get a vorticity equation
(iii) Pressure can be found from u and f by solving Poisson equations

4
Leray-Helmholtz projection P onto divergence-free fields
L2(Ω,RN) = ∇H1(Ω)⊕ PL2(Ω,RN)
v = ∇φ+ w,
〈w,∇ψ〉 = 〈v −∇φ,∇ψ〉 = 0 for all ψ ∈ H1(Ω).
∆φ = ∇ · v, ∂nφ∣∣∣Γ
= n · v
∇ ·w = 0 in Ω, n ·w = 0 on ∂Ω.
Notation: w = Pv, φ = Qv.

5
The Laplace-Leray commutator and Stokes pressure
For all v ∈ H2(Ω,RN) we have
∆(I − P)v = ∆∇φ = ∇∆φ = ∇∇ · v,
∆Pv = (∆−∇∇·)v = −∇×∇× v,
P∆v = P(∆−∇∇·)v
(∆P − P∆)v = (I − P)(∆−∇∇·)v.
We define the Stokes pressure for u ∈ H2(Ω,RN) via
pS(u) = Q(∆−∇∇·)u, then ∇pS(u) = (∆P − P∆)u.
• Note (∆−∇∇·)u ∈ H(div; Ω), hence pS satsifies the BVP
∆pS = 0 in Ω, n · ∇pS = n · (∆−∇∇·)u in H−1/2(Γ)

6
pS arises from tangential vorticity at the boundary
Johnston-Liu
〈∇pS,∇q〉 = −〈n× (∇× u),∇q〉Γ, ∀q ∈ H1(Ω)

7
Johnston-Liu

8
Space of Stokes pressures
∆pS = 0 in Ω, n · ∇pS = n · (∆−∇∇·)u = f in H−1/2(Γ)
Sp = p ∈ H1(Ω)/R : ∆p = 0 in Ω, n ·∇p ∈ SΓ,
SΓ = f ∈ H−1/2(Γ) :
∫G
f = 0 ∀components G of Γ.
• ∃ a bounded right inverse ∇pS 7→ u from Sp→ H2 ∩H10(Ω,RN)
• In R3, ∇Sp is the space of simultaneous gradients and curls:
∇Sp = ∇H1(Ω) ∩ ∇×H1(Ω,R3)

9
A formula/decomposition for the Navier-Stokes pressure
Suppose that u = Pu is a strong solution of NSE:
ut +∇p = ν∆u + f − u · ∇u in Ω
∇ · u = 0 in Ω
u = 0 on ∂Ω
Apply P and note P∇p = 0, P∆u = ∆u−∇pS(u):
ut + ν∇pS(u) = ν∆u + P(f − u · ∇u)
Subtracting, we find that (up to spatial constant) necessarily
p = νpS(u) +Q(f − u · ∇u).
∆p = ∇ · (f − u · ∇u), ∂np∣∣∣Γ
= n · f − n · ∇ ×∇× u

10
Pressure formula with inflow/outflow
Suppose we require: u = g on ∂Ω,
where to conserve volume,
∫∂Ω
n · g = 0 (t ≥ 0).
Let R(g) solve ∆R(g) = 0 in Ω, n · ∇R(g) = n · g on ∂Ω.
If ∇ · u = 0 then u−∇R(g) = P(u−∇R(g)) = Pu.
Applying P to NSE we now find
∂t(u−∇R(g)) + ν∇pS(u) = ν∆u + P(f − u · ∇u),
p = νpS(u)−R(∂tg) +Q(f − u · ∇u).
For ∀q ∈ H1(Ω) such that:
〈∇p,∇q〉 = ν〈∇ × u,n×∇q〉Γ − 〈n·gt, q〉Γ + 〈f − u · ∇u,∇q〉

11
Extended/unconstrained NSE
ut + u · ∇u +∇p = ν∆u + f , u|∂Ω = g
p = νpS(u)−R(∂tg) +Q(f − u · ∇u)
∆p = ∇·(f−u·∇u), ∂np∣∣∣Γ
= n·(f−u·∇u−gt)−n·∇×∇×u
〈∇p,∇q〉 = ν〈∇ × u,n×∇q〉Γ − 〈n·gt, q〉Γ + 〈f − u · ∇u,∇q〉
〈∇p,∇q〉 = ν〈(∆−∇∇·)u,∇q〉 − 〈n·gt, q〉Γ + 〈f − u · ∇u,∇q〉〈n·gt, q〉Γ + 〈u · ∇u +∇p,∇q〉 = 〈ν∆u + f ,∇q〉 − ν〈∇∇ · u,∇q〉
〈(∇ · u)t, q〉+ ν〈∇(∇ · u),∇q〉 = 0
(∇ · u)t = ν∆(∇ · u) in Ω, ∂n(∇ · u)|Γ = 0
If (∇ · u)∣∣∣t=0
= 0, then ∇ · u ≡ 0. Equivalent to the original NSE

12
Comparing with traditional formulation of NSE
ut + P(u · ∇u− f) = νP∆u
• Formally ∂t(∇ · u) = 0
• Perform analysis in spaces of divergence-free fields
(unconstrained Stokes operator P∆u is incompletely dissipative).
• Inf-Sup/LBB condition(Ladyzhenskaya-Babuska-Brezzi)
ut + P(u · ∇u− f) = ν∆u− ν∇pS = νP∆u + ν∇(∇ · u)
• Improved enforcement of the divergence constraint
Formally ∂t(∇ · u) = ν∆(∇ · u), ∂n(∇ · u) = 0
• Equivalent to a ‘reduced’ formulation of Grubb & Solonnikov (1991)
studied as a pseudodifferential IBVP

13
Local-time well posedness for extended NSE
ut + u · ∇u +∇p = ν∆u + f , u|∂Ω = 0
p = νpS(u)−R(∂tg) +Q(f − u · ∇u)
Assumeuin ∈ Huin := H1(Ω,RN),
f ∈ Hf := L2(0, T ;L2(Ω,RN)),
g ∈ Hg := H3/4(0, T ;L2(Γ,RN)) ∩ L2(0, T ;H3/2(Γ,RN))
∩g | ∂t(n · g) ∈ L2(0, T ;H−1/2(Γ)),g = uin (t = 0, x ∈ Γ), 〈n · ∂tg, 1〉Γ = 0
Then ∃T ∗ > 0 so that a unique strong solution exists, with
u ∈ L2([0, T ∗], H2) ∩H1([0, T ∗], L2) → C([0, T ∗], H1).

14
Estimate for the Laplace-Leray commutator
Recall [∆,P]u = (∆P − P∆)u = ∇pS
For period box [P,∆]u = 0
If ∇ · u = 0, then ‖[∆,P]u‖ = ‖((I − P)∆−∇∇·)u‖ ≤ ‖∆u‖.
Theorem Let Ω ⊂ RN (N ≥ 2) be a bounded C3 domain Then
∀ε > 0 ∃C ≥ 0 such that for all u ∈ H2 ∩H10(Ω,RN),∫
Ω
|(∆P − P∆)u|2 ≤(
1
2+ ε
)∫Ω
|∆u|2 + C
∫Ω
|∇u|2
Hence our unconstrained NSE is fully dissipative:
ut + P(u · ∇u− f) + ν∇pS = ν∆u
NSE as perturbed heat equation!

15
An example in half period strip 0 < x < 2π, y ≥ 0
u(x, y) = sin(kx)ye−ky, any v(x, y) with v(x, 0) = 0
Stokes pressure: p(x, y) = cos(kx)e−ky
∆p = 0, ∂yp(x, 0) = −k cos(kx) = −∂x(∂yu− ∂xv)|y=0
∆u = −2k sin(kx)e−ky = 2∂xp,
∇ · (u, 0) = 0,∇× (0, v) = 0 at y = 0 (boundary properties )
‖px‖2 = ‖py‖2 = πk2 (equal partition)⟨
∆u− ∂xp0− ∂yp
,∂xp
∂yp
⟩= ‖px‖2 − ‖py‖2 = 0 (orthogonality)
This implies: ‖∇p‖2 =1
2‖∆u‖2 ≤ 1
2(‖∆u‖2 + ‖∆v‖2)

16
Basic ingredients in the (elementary) proof:
Let Φ(x) = dist(x,Γ), n(x) = −∇Φ(x)
Ωs = x ∈ Ω | Φ(x) < s, 〈f, g〉s := 〈f, g〉ΩsChoose a cutoff function ξ so ξ(x) = 1 (Φ < 1
2s), ξ(x) = 0 (Φ > s).
Decompose velocity field into parts parallel and normal to Γ:
u = u⊥ + u‖, u⊥ = ξnntu+ (1− ξ)u, u‖ = ξ(I−nnt)u.
(i) A parallel-normal decomposition u = u‖ + u⊥
satisfying on ∂Ω: ∇ · u‖ = 0, ∇× u⊥ = 0
(ii) An orthogonality identity: ‖∆u‖‖2 = ‖∇pS‖2 + ‖∇pS −∆u‖‖2
(iii) Sharp N2D estimates on tubes: ‖∇pS‖‖2s ∼ ‖∇pS⊥‖2s

17
∇pS = (∆P − P∆)u = (I − P)(∆−∇∇·)(u‖ +
HHHH
u⊥)
(due to ∇× u⊥ = 0 on ∂Ω)
∇pS = ∆u‖ −∇∇ · u‖ − P(∆−∇∇·)u‖
〈∇pS,∇pS〉 = 〈∇pS,∆u‖〉 − 〈∇pS,∇∇ · u‖〉 − 〈∇pS,Pv〉= 〈∇pS,∆u‖〉 − 0− 0
(due to ∇ · u‖ = 0 on ∂Ω, ∆pS = 0, ∇ ⊥ Pv)
‖∆u‖‖2 = ‖∇pS‖2 + ‖∇pS −∆u‖‖2 (orthogonality)

18
‖∇p−∆u‖‖2 = ‖∇p‖2Ωcs + ‖(∇p−∆u‖)⊥‖2s + ‖(∇p−∆u‖)‖‖2s≥ ‖∇p‖2Ωcs + (1− ε)‖∇p⊥‖2s + ‖(∇p−∆u‖)‖‖2s + · · ·
0 = 〈(∇p−∆u‖)‖,∇p‖〉s + 〈(∇p−∆u‖)⊥,∇p⊥〉s +
∫Φ>s
|∇p|2
Hence
2〈(∇p−∆u‖)⊥,∇p⊥〉s ≤ −2〈(∇p−∆u‖)‖,∇p‖〉s≤ ‖(∇p−∆u‖)‖‖2s + ‖∇p‖‖2s
‖(∇p−∆u‖)‖‖2s ≥ ‖∇p‖‖2s + 2(‖∇p⊥‖2s − ‖∇p‖‖2s)− junk
‖∇p−∆u‖‖2 ≥ (1− ε)‖∇p‖2 + 2(‖∇p⊥‖2s − ‖∇p‖‖2s)− junk

19
D2N/N2D bounds on tubes Ωs = x ∈ Ω | Φ(x) < s
Lemma For s0 > 0 small ∃C0 such that whenever ∆p = 0 in Ωs0
and 0 < s < s0 then∣∣∣∣∫Φ<s
|n·∇p|2 − |(I − nnt)∇p|2∣∣∣∣ ≤ C0s
∫Φ<s0
|∇p|2
In the limit s→ 0, it reduce to∣∣∣∣∫Γ
|n·∇p|2 −∫
Γ
|(I − nnt)∇p|2∣∣∣∣ ≤ C0
∫Ω
|∇p|2
In a half space: ‖n·∇p‖2 = ‖(I − nnt)∇p‖2.
Known as Rellich identity in 2D circular disk.

20
‖∆u‖2 = ‖∆u‖‖2 + 2〈∆u‖,∆u⊥〉+ ‖∆u⊥‖2
≥ (1− ε)‖∆u‖‖2 − C‖∇u‖2
= (1− ε)(‖∇pS‖2 + ‖∇pS −∆u‖‖2)− C‖∇u‖2
≥ (2− 3ε)‖∇pS‖2 − C‖∇u‖2

21
Planar domains with corners – a negative result
Theorem (Cozzi & Pego, 2010) Let Ω ⊂ R2 be a bounded domain
with a locally straight corner. Given any β < 1 and C > 0, there
exists u ∈ H2 ∩H10(Ω,RN) such that∫
Ω
|∇pS(u)|2 > β
∫Ω
|∆u|2 + C
∫Ω
|∇u|2
Open Q: Is extended Navier-Stokes dynamics well-posed in Lipschitz
(or polygonal) domains?

22
Difference scheme with pressure explicit (Johnston-L, 2004)
∆pn = ∇ · (fn − un · ∇un) in Ω
n ·∇pn = n · fn − νn · (∇×∇× un) on ∂Ω
un+1 − un
∆t− ν∆un+1 = fn − un · ∇un −∇pn
un+1 = 0 on ∂Ω
• No Stokes solver! ∇ · un is not forced to be zero
• Demonstrated numerical stability, full time accuracy
• Proved linear stability of tangential velocity in slab geometry by
energy estimates
• Equivalent to gauge method (E & L). Unconditional stability for
schemes with time lag BC for Stokes eq (Wang & L, 2000)

23
Time-discrete scheme with pressure explicit(related to projection methods: Ti96,Pe01,GS03,JL04)
un+1 − un
∆t− ν∆un+1 = fn − un · ∇un −∇pn,
un+1 = 0 on ∂Ω,
∇pn = ν∇pnS
+ (I − P)(fn − un · ∇un).
We have the pressure estimate, for fixed constant β < 1
‖∇pn‖ ≤ ν‖∇pnS‖+ ‖fn − un · ∇un‖
≤ νβ‖∆un‖+ ‖fn − un · ∇un‖+ C‖∇un‖

24
Stability analysis in H10 : dot with −∆un+1
un+1 − un
∆t− ν∆un+1 = fn − un · ∇un −∇pn
‖∇un+1 −∇un‖2 + ‖∇un+1‖2 − ‖∇un‖2
2∆t+ ν‖∆un+1‖2
≤ ‖∆un+1‖(2‖fn − un · ∇un‖+ ν‖∇pnS‖)
≤ (ε1
2+ν
2)‖∆un+1‖2 +
2
ε1‖fn − un · ∇un‖2 +
ν
2‖∇pS‖2
This gives ‖∇un+1‖2 − ‖∇un‖2
∆t+ (ν − ε1)‖∆un+1‖2
≤ 8
ε1(‖fn‖2 + ‖un · ∇un‖2) + ν‖∇pn
S‖2

25
Handling the pressure
‖∇un+1‖2 − ‖∇un‖2
∆t+ (ν − ε1)‖∆un+1‖2
≤ 8
ε1(‖fn‖2 + ‖un · ∇un‖2) + ν‖∇pn
S‖2
Use the theorem (β = 12 + ε): ν‖∇pn
S‖2 ≤ νβ‖∆un‖2 + νC‖∇un‖2
‖∇un+1‖2 − ‖∇un‖2
∆t+ (ν − ε1)(‖∆un+1‖2 − ‖∆un‖2)
+ (ν − ε1 − νβ)‖∆un‖2
≤ 8
ε1(‖fn‖2 + ‖un · ∇un‖2) + νC‖∇un‖2

26
Handling the nonlinear term
Use Ladyzhenskaya’s inequalities to get for N = 2, 3 (standard)
‖un · ∇un‖2 ≤ ε2‖∆un‖2 +4C
ε2‖∇un‖6
Take ε1, ε2 small so ε := (ν − ε1 − νβ − ε2) > 0 to get:
‖∇un+1‖2 − ‖∇un‖2 + ε‖∆un‖2
≤ C(‖fn‖2 + ‖∇un‖2 + ‖∇un‖6)
An easy discrete Gronwall inequality leads to:

27
Stability theorem for N = 2, 3
Theorem Take f ∈ L2(0, T ;L2(Ω,RN)), u0 ∈ H2 ∩H10(Ω,RN).
Then ∃ positive constants T ∗ and C∗ depending only upon Ω, ν and
M0 := ‖∇u0‖2 + ν∆t‖∆u0‖2 +
∫ T
0
‖f‖2,
so that whenever n∆t ≤ T ∗ we have
sup0≤k≤n
‖∇uk‖2 +
n−1∑k=0
(‖∆uk‖2 +
∥∥∥∥uk+1 − uk
∆t
∥∥∥∥2)
∆t ≤ C∗.

28
• Classic inf-sup condition for steady Stokes flow FEM
Find u ∈ X ⊂ H10(Ω,RN), p ∈ Y ⊂ L2(Ω)/R so that
〈∇u,∇v〉+ 〈∇p,v〉 = 〈f ,v〉 ∀v ∈ X,〈u,∇q〉 = 0 ∀q ∈ Y.
infp∈Y
supv∈X
〈p,∇ · v〉‖p‖‖∇v‖
≥ c > 0. (1)
Well-known:
• Condition (1) is necessary and sufficient for stability of
(p,u) in L2 ×H10 (the weak NS solution space).
• Many simple finite elements fail this condition
(e.g., equal-order Lagrange)

29
Steady Stokes flow in terms of Stokes pressure
Find u ∈ X ⊂ H2 ∩H10(Ω,RN), p ∈ Y ⊂ H1(Ω)/R so that
〈∇u,∇v〉+ 〈∇p,v〉 = 〈f ,v〉 ∀v ∈ X,〈∇p,∇q〉 − 〈∇ × u,n×∇q〉Γ = 〈f,∇q〉 ∀q ∈ Y.
Stability of (p,u) ∈ H1× (H2 ∩H10(Ω,RN)) (strong solution space)
is not subject to standard inf-sup velocity-pressure compatibility.
Still a mixed formulation computationally for steady flow
Possible gain in simplicity of discretization with C0 elements
(e.g. for complex fluid-coupled systems) — nonconforming for H2

30
C0 Finite element schemes (Johnston-Liu, ’04)
C0 finite element scheme: Xh ⊂ H10(Ω,RN), Yh ⊂ H1(Ω)/R. For
all vh ∈ Xh and qh ∈ Yh, we require require
〈∇pnh,∇qh〉 = 〈fn − unh ·∇unh,∇qh〉+ ν〈∇ × unh,n×∇qh〉Γ,
〈un+1h − unh
∆t,vh〉+ ν〈∇un+1
h ,∇vh〉 = 〈fn − unh · ∇unh −∇pnh,vh〉.
• This scheme has fully accuracy for both velocity and pressure
when there are enough resolution and regularity for the solution. We
have no theorem on why it works.
• For C1 FEM without inf-sup compatibility, however, we have fully
theory: stability and error estimates (both for velocity and pressure).

31
Error estimates of C1 FE scheme
unh ∈ Xh ⊂ H2 ∩H10(Ω,RN), pnh ∈ Yh ⊂ H1(Ω)/R.
For all vh ∈ Xh and qh ∈ Yh, require
1
∆t
(〈∇un+1
h ,∇vh〉 − 〈∇unh,∇vh〉)
+ ν〈∆un+1h ,∆vh〉
= 〈∇pnh,∆vh〉 − 〈fn − unh · ∇unh,∆vh〉.
〈∇pnh,∇qh〉 = 〈fn − unh ·∇unh,∇qh〉+ ν〈∇ × unh,n×∇qh〉Γ,
Theorem Assume Ω is a bounded domain in RN (N=2,3) with C3 boundary. LetM0, > 0, and let T∗ > 0 be given by the stability theorem. Let m ≥ 2, m′ ≥ 1 beintegers, and assume
For any v ∈ Hm+1 ∩H10(Ω,RN) and q ∈ Hm′(Ω),
infvh∈X0,h
‖∆(v − vh)‖ ≤ C0hk−1‖v‖Hk+1 for 2 ≤ k ≤ m,

32
infqh∈Yh
‖∇(q − qh)‖ ≤ C0hm′−1‖q‖Hm′,
where C0 > 0 is independent of v, q and h.
Then there exists C1 > 0 with the following property. Whenever u0h ∈ Xh,
0 < h < 1, 0 < n∆t ≤ min(T, T∗), and
‖∇u0h‖2 + ∆t‖∆u0
h‖2 +
n∑k=0
‖f(tk)‖2∆t ≤M0,
then en = u(tn)− unh, rn = p(tn)− pnh of C1 finite element scheme satisfy
sup0≤k≤n
‖∇ek‖2 +
n∑k=0
(‖∆ek‖2 + ‖∇rk‖2
)∆t
≤ C1(∆t2 + h2m−2 + h2m′−2 + ‖∇e0‖2 + ‖∆e0‖2∆t).

33
3. Split-step time discretizations of NSE
Chorin/Temam projection method
Given velocity Un = PUn, let F n+1 = fn+1 −Un · ∇Un
and update velocity by solving
un+1 −Un
∆t= ν∆un+1 + F n+1 in Ω, un+1 = 0 on ∂Ω,
Un+1 = un+1 −∇φn+1 = Pun+1
Why does it work? Apply P. Stokes pressure reappears implicitly:
Un+1 −Un
∆t+ ν∇pS(U
n+1) = ν∆Un+1 + PF n+1,
Un+1 = −∇φn+1 on ∂Ω (slip error)

34
Subtract—Formally we get a consistent 1st-order scheme, since
φn+1
∆t− ν∆φn+1 = νpS(U
n+1) +Q(fn+1 −Un · ∇Un),
n · ∇φn+1 = 0 on ∂Ω.
thus ∇φn+1|∂Ω = O(∆t). The correct corresponding pressure
pn+1 = νpS(Un+1) +Q(fn+1 −Un+1 · ∇Un+1)
=φn+1
∆t− ν∆φn+1 +O(∆t)
The (old) pressure approximation φn+1/∆t has a boundary layer
with O(1) gradient error on ∂Ω, since n · ∇φn+1 = 0 but
n ·∇pn+1 = n · (ν∆Un+1 + fn+1 −Un+1 · ∇Un+1).

35
Higher-order accurate time discretization
Chorin-Temam method: 1st-order in time, boundary layers for p
Brown, Cortez, Minion ’01: Explain 2nd-order time accuracy
Guermond, Minev, Shen ’06: Review many projection methods, FEM
• use higher-order backward time difference formulas, and
• improve boundary-layer accuracy using various strategies, e.g.:
? Pressure approximation (Karniadakis et al ’91):
extrapolate curl-curl BCs to approximate ∇pn+1 in a RHS F n+1
? Pressure update (van Kan ’86, BCG ’89):
predict then correct pressure, avoiding curl-curl BCs
? Slip correction (Kim-Moin ’86):
extrapolate to improve BCs for Un+1

36
A stable (3,2) slip-corrected projection method
Use BD3 formula D3un+1 =
1
∆t
(α0u
n+1 +∑k≥1
αkun+1−k
)Write Hj = U j · ∇U j & extrapolate:
E3Hn+1 = 3Hn − 3Hn−1 + Hn−2, E2φn+1 = 2φn − φn−1.
1. Given U j ≈ u(j∆t) (j ≤ n), solve (without any pressure!)
1
∆t
(α0u
n+1∗ +
∑k≥1
αkUn+1−k
)= ν∆un+1
∗ + fn+1 − E3Hn+1,
un+1∗ = gn+1 +∇E2φn+1 on Γ.
2. Un+1 = un+1∗ −∇φn+1, ∆φn+1 = ∇ · un+1, n · ∇φn+1 = 0.

37
Formal accuracy: Apply P and recall
Puj∗ = PU j = U j −∇R(gj),
P∆un+1∗ = ∆Pun+1
∗ −∇pS(un+1∗ ) = ∆Un+1 −∇pS(U
n+1) :
D3Un+1 +∇pn+1 = ν∆Un+1 + fn+1 − E3Hn+1,
pn+1 = νpS(Un+1)−R(D3g
n+1) +Qfn+1 −QE3Hn+1,
Un+1 = gn+1 −∇(φn+1 − E2φn+1) on Γ.(α0
∆t− ν∆
)(φn+1 − E2φn+1) = pn+1 − 2pn + pn−1 = O(∆t2),
hence Un+1 − gn+1 = O(∆t3) formally and the scheme is formally
3rd-order accurate overall.

38
A stable (3,2) pressure approximation method
Update intermediate velocity un∗ via (Hn = un∗ · ∇un∗)
F = fn+1 − E3Hn+1 − 1
∆t
∑j≥1
αjun+1−j∗ ,
P = νpS(E2un+1∗ )− α0
∆tR(gn+1) +QF
α0
∆tun+1∗ − ν∆un+1
∗ = −∇P + F
un+1∗ = gn+1 on Γ
The div-free velocity and consistent pressure are
Un+1 = un+1∗ −∇φn+1, ∆φn+1 = ∇ · un+1, n · ∇φn+1 = 0,
pn+1 = P − ν∇ · un+1∗ . (Improves over previous methods)

39
(3,3) pressure update method (cf. BCG ’89, Ren et al ’05)
1. Find un+1∗ to solve
1
∆t
(α0u
n+1∗ +
∑k≥1
αkUn+1−k
)+∇E3pn+1
= ν∆un+1∗ + fn+1 − E3Hn+1,
un+1∗ = gn+1 on Γ.
2. Un+1 = un+1∗ −∇φn+1, ∆φn+1 = ∇ · un+1, n · ∇φn+1 = 0.
3. Update pressure via
pn+1 = E3pn+1 +(α0
∆t− ν∆
)φn+1

40
Single mode Stokes test problem in strip −1 < x < 1
∂tu +∇pS(u) = ∆u, u|x=±1 = 0
u(t, x, y) = eiξy−σt(u(x, ξ), iv(x, ξ))
For the case of odd symmetry: p = eiξy−σt sinh ξx,
u(x) = A
(cosh ξx
cosh ξ− cosµx
cosµ
), A =
ξ cosh ξ
ξ2 + µ2,
v(x) = B
(sinh ξx
sinh ξ− sinµx
sinµ
), B =
ξ sinh ξ
ξ2 + µ2.
ξ tanh ξ + µ tanµ = 0, σ = ξ2 + µ2.
Usually take ξ = 1, µ ≈ 2.883356, σ ≈ 9.314.

41
Single-mode time-discrete stability tests
A0un+1 +A1u
n + . . .+Akun+1−k = 0.
Look for un = κnu with 0 I 0
0 0 I
−A3 −A2 −A1
u
κu
κ2u
= κ
I 0 0
0 I 0
0 0 A0
u
κu
κ2u
.
Solve for eigenvalues κ using Matlab eigs.
Plot max |κ| vs ∆t for various combinations of finite-element
velocity/pressure pairs and orders of accuracy.

42
Slip-correction schemes, single-mode stability test
10−5
10−3
10−1
101
103
105
107
109
0.5
0.6
0.7
0.8
0.9
1
1.1
∆t
(3,2) P1/P1(3,2) P2/P1(2,2) P1/P1(2,2) P2/P1(4,3) P1/P1(4,3) P2/P1
1: max |κ| vs ∆t. 30 elements for each var. Solid lines: space-continuous theory.
(2,2), (3,2): unconditional stability. (cf. Leriche et al ’06 w/PA)
(3,3), (4,3): stability for ∆t < ∆tc independent of h, ξ. (smooth?)
43
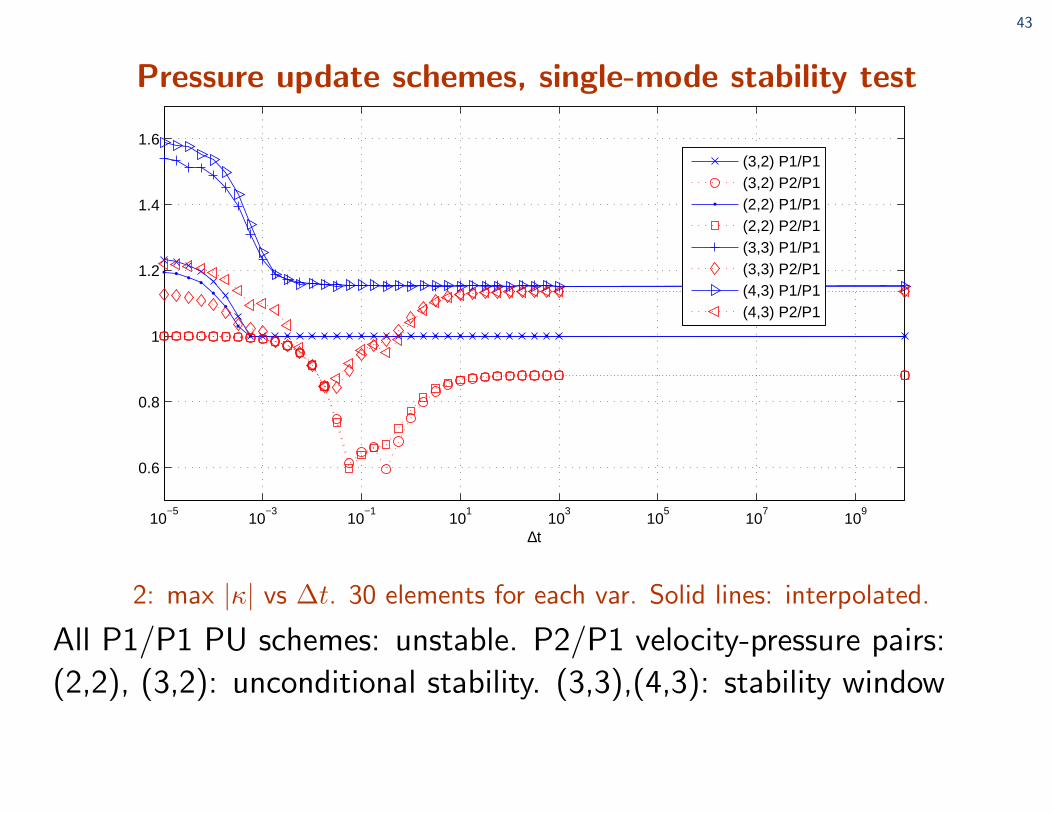
Pressure update schemes, single-mode stability test
10−5
10−3
10−1
101
103
105
107
109
0.6
0.8
1
1.2
1.4
1.6
∆t
(3,2) P1/P1(3,2) P2/P1(2,2) P1/P1(2,2) P2/P1(3,3) P1/P1(3,3) P2/P1(4,3) P1/P1(4,3) P2/P1
2: max |κ| vs ∆t. 30 elements for each var. Solid lines: interpolated.
All P1/P1 PU schemes: unstable. P2/P1 velocity-pressure pairs:
(2,2), (3,2): unconditional stability. (3,3),(4,3): stability window

44
2D test problem: stability & accuracy
Ω = square [−1, 1]2− hole, or ring. ν = 2, t = 2
u(t) = g(t)
(cos2(πx/2) sin(πy)
− sin(πx) cos2(πy/2)
),
p(t) = g(t) cos(πx/2) sin(πy/2).

45
2D test: stability in domains with & without corners
∆tc \ N 0 1 2
(3,3) P1/P1 0.045 0.015 0.00067
(3,3) P2/P2 0.00027 0.000073 0.000018
(4,3) P1/P1 0.048 0.017 0.00074
(4,3) P2/P2 0.00029 0.000080 0.000020
Largest time step for linear stability of PA schemes in a square with hole.
N = # of refinements from grid in figure. Diffusive constraint on ∆t.
∆tc \ N 0 1 2
(3,3) P1/P1 0.022 0.014 0.010
(3,3) P2/P2 0.007 0.005 0.005
(4,3) P1/P1 0.024 0.017 0.014
(4,3) P2/P2 0.011 0.011 0.010
Largest time step for linear stability of PA schemes in annulus.
N = # of refinements from grid in figure. No diffusive constraint on ∆t.

46
Accuracy: slip-corrected P4 FEM, square with hole
− log10E (& local order α) vs. ∆t
E \ ∆t 0.02 0.01 0.005
‖p− ph‖L2 4.18 (2.71) 5.08 (2.98) 5.99 (3.02)
‖∇(p− ph)‖L2 3.47 (3.73) 4.39 (3.04) 5.17 (2.62)
‖u− uh‖L∞ 5.75 (2.73) 6.65 (3.02) 7.57 (3.05)
‖∇(u− uh)‖L∞ 3.94 (3.22) 4.95 (3.35) 5.83 (2.92)
Top: (3,2) SC scheme. Bottom: (2,1) SC scheme.
E \ ∆t 0.02 0.01 0.005
‖p− ph‖L2 2.04 (1.97) 2.64 (2.02) 3.26 (2.04)
‖∇(p− ph)‖L2 1.55 (1.96) 2.15 (2) 2.76 (2.02)
‖u− uh‖L∞ 3.61 (1.96) 4.22 (2.02) 4.84 (2.05)
‖∇(u− uh)‖L∞ 2.19 (1.97) 2.8 (2.01) 3.41 (2.04)

47
Pressure error for square with hole, (3,2) schemes
−0.5
0
0.5
−0.5
0
0.5−4
−2
0
2
4
x 10−5
−0.5
0
0.5
−0.5
0
0.5−2
−1
0
1
2
x 10−4
Pressure error for the (3,2) PA (left) and SC (right) schemes.
∆t = 0.02. 1296 P4 elements for each variable.
Only values at vertices of triangles are used in the plots.

48
Benchmark tests with equal-order C0 finite elements
(u,v)=(1,0)
(u,v) given
(u,v) given
3: Mesh used for backward facing step flow when ν = 1/600 and for flow past acylinder when ν = 1/1000.

49
Driven Cavity, Re=1000, t=50
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1−5 −5
−5
−4
−4
−4
−3
−3
−3
−3
−2
−2
−2
−2
−2
−2
−2−
2
−1
−1
−1
−1−
1
−0.5
−0.5
−0.5
−0.5
−0.
5−
0.5
0
0
0
0
00 0
0.5
0.5
0.5
0.5
0.5
0.5
0.5
1
1
1
1
1
1
1
1
1
2
2
2
2
2
2
2
23
3
3
33
33
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
−0.002
00.02
0.020.02
0.05
0.05
0.05
0.05
0.07
0.07
0.07
0.07
0.07
0.09
0.09
0.09 0.09
0.11
0.11
0.11
0.110.120.17
2× 64× 64 stretched rectangular grid
8192 piecewise linear C0 elements for each variable.
hmin = 0.00594, ∆t = 0.006, (3,2) slip-corrected scheme.
Left: vorticity contours. Right: pressure contours.

50
Backward-facing step
0 0.5 1 1.5 2 2.5 3−0.5
0
0.5
S
X
(3,2) SC scheme, 6640 P1 elements for each variable (dof=3487).
ν = 1/100, t = 20, hmin = 0.00783, ∆t = 0.006.
0 1 2 3 4 5 6 7 8 9 10−0.5
0
0.5
X3
X1 X
2
S
(3,2) SC scheme, 1700 P2 elements for each variable (dof=3925).
ν = 1/600, t = 120, hmin = 0.0186, ∆t = 0.003.

51
Flow past cylinder, ν = 1/1000
0 0.5 1 1.5 20
0.2
0.4
0 0.5 1 1.5 20
0.2
0.4
0 0.5 1 1.5 20
0.2
0.4
0 0.5 1 1.5 20
0.2
0.4
0 0.5 1 1.5 20
0.2
0.4
0 0.5 1 1.5 20
0.2
0.4

52
Drag, lift, pressure drop
0 2 4 6 8−0.5
0
0.5
1
1.5
2
2.5
3
t(cd,max
)=3.9348, cd,max
=2.9293
t0 2 4 6 8
−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
t(cl,max
)=5.6932, cl,max
=0.47756
t0 2 4 6 8
−0.5
0
0.5
1
1.5
2
2.5
∆pmax
=2.3219, ∆p(8)=−0.11148
t
(3,2) SC scheme
763 isoparametric P4 elements (dof=6322) for each variable.

53
Summary
• The Navier-Stokes pressure for strong solutions in C3 domains is
determined by the current velocity and data by
p = νpS(u)−R(∂tg) +Q(f − u · ∇u).
• The Laplace-Leray commutator is ∇pS(u) and is strictly controlled
by ∆u at leading order, when u = 0 on the boundary.
• Improved accuracy (esp. for pressure) in numerical computations
• Improved flexibility of finite-element methods
— inf-sup conditions need not be respected.
• Short-time wellposedness extends to ∇ · u 6= 0 with simple proof

54
Thank you!





























