Embed Size (px)
Citation preview
JEEVES the Robot Butler
Team JEEVES
Daniel Steffy, Alissa Halvorson, Bogdan Pisica, Christopher Pearson, Hameed Ebadi
A Beacon-Sensing, Path Finding Robot Operating in a Crowded Environment
Project Objectives•Create a Robot System that:
▫Carries Beverage From Vendor to User▫Detects Direction of Beacon Signal▫Dynamic Path Finding Based on Ultra-Sonic
Sensors▫Detects When To Stop▫Able to Return to Base Station
Bogdan Pisica
Project Purpose
•Possibilities for Nursing Homes or Hospitals.▫Base Station with multiple robots
delivering meds, food, etc. to patients•People with disabilities•Convenience
Bogdan Pisica
Achievable Goals
• Implementation of the Robotic Chassis•Detection of Feedback on Robotic Motors•Robot Is Able To Move From Point A to Point
B•Sonar Object Detection•Beacon Initiates Robotic Movement•Capable of Carrying a Beverage
Bogdan Pisica
Medium Level Goals
•Robot Able to Detect Direction of Beacon
•Dynamic Object Avoidance•Calibration of Wheels Based on
Feedback•Returns to Point A
Bogdan Pisica
High Level Goals
•Beverage Dispenser That Contains Multiple Options
•Beacon Allows for Multiple Selections•Multiple Users
Bogdan Pisica

Details of Design
Details of Design
•Three Separate Pieces• Robot, Base Station, Remote• Majority of the Processing Power will be
in the Robot• Remote and Base Station both Transmit
Daniel Steffy
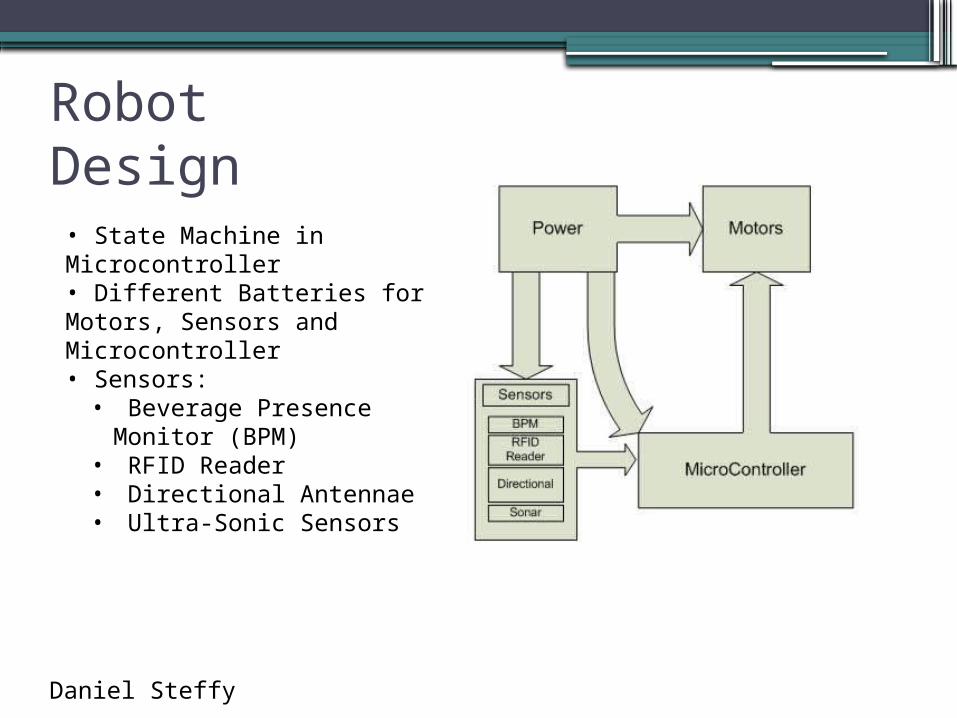
Robot Design• State Machine in Microcontroller• Different Batteries for Motors, Sensors and Microcontroller• Sensors:• Beverage Presence
Monitor (BPM)• RFID Reader• Directional Antennae• Ultra-Sonic Sensors
Daniel Steffy
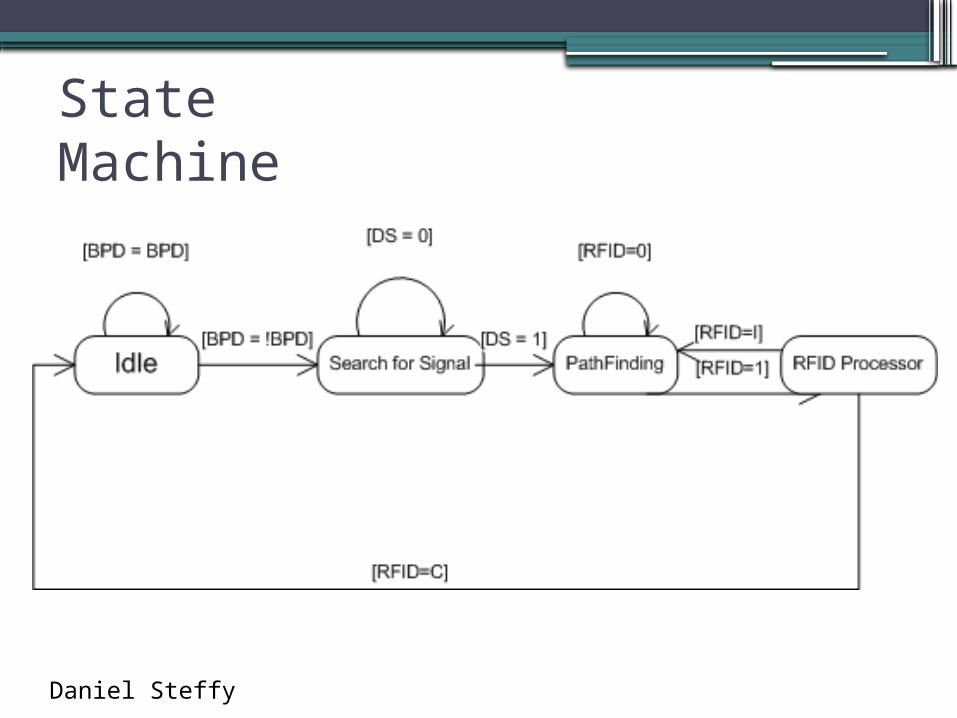
State Machine
Daniel Steffy
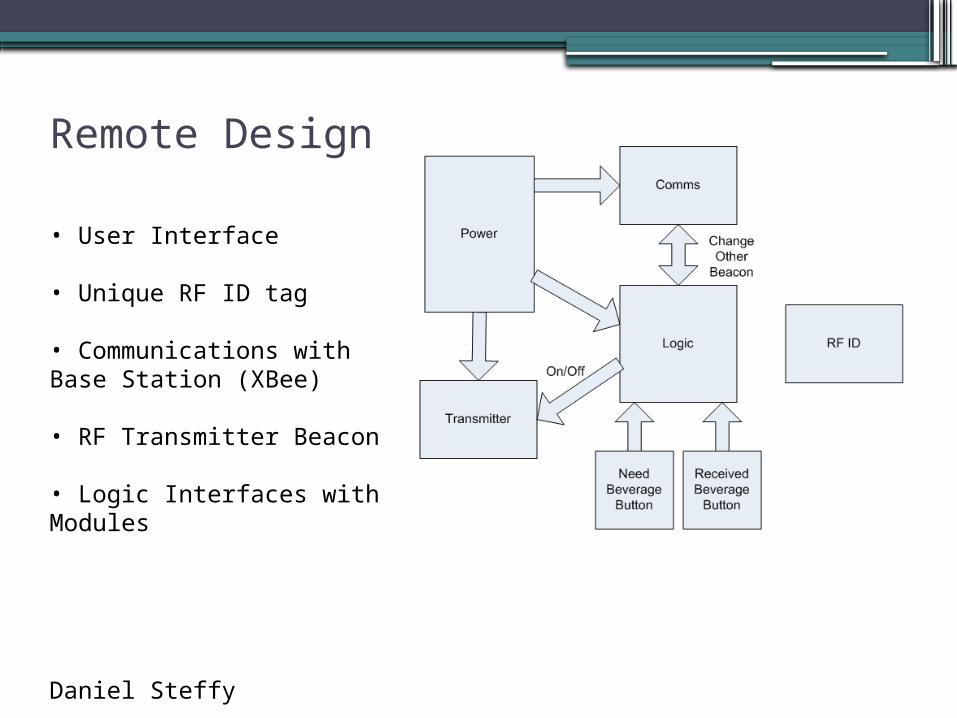
Remote Design
• User Interface
• Unique RF ID tag
• Communications with Base Station (XBee)
• RF Transmitter Beacon
• Logic Interfaces with Modules
Daniel Steffy
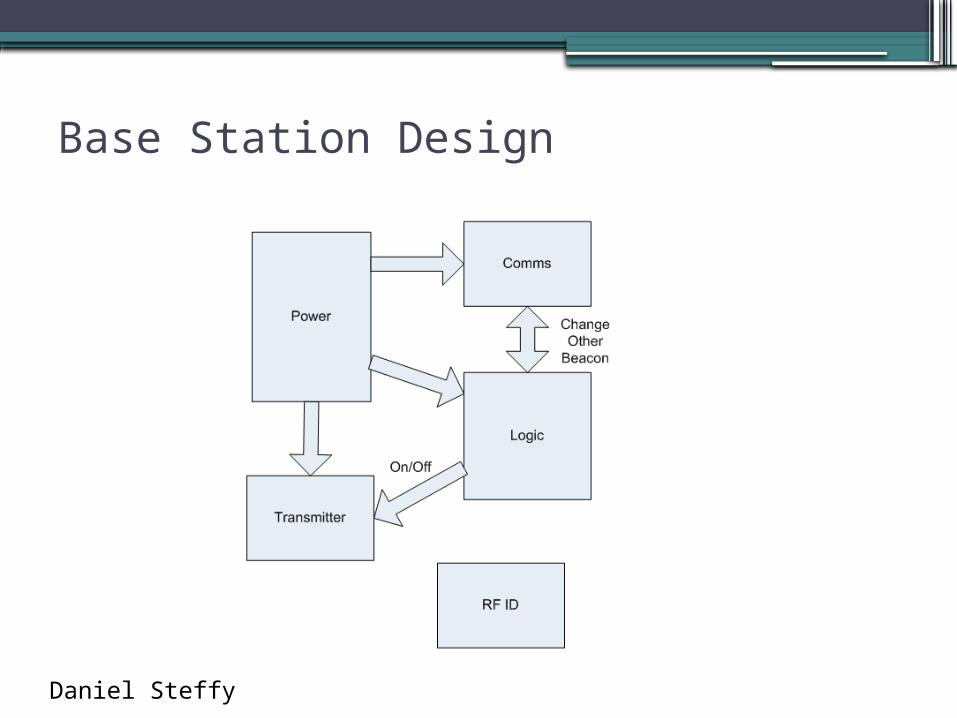
Base Station Design
Daniel Steffy
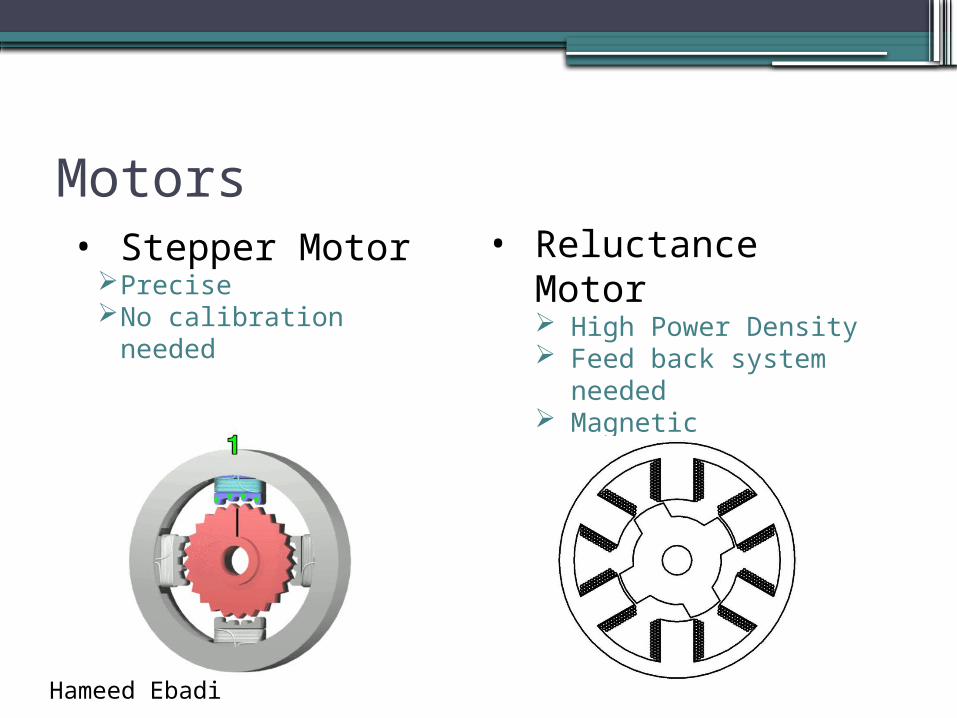
Motors• Reluctance
Motor High Power Density Feed back system
needed Magnetic Reluctance
[resistance]
• Stepper MotorPreciseNo calibration
needed
Hameed Ebadi
Microprocessor
•MSP 430 F2616X•Low Supply Voltage Range
1.8 V to 3.6 V•16-Bit RISC Architecture•64 I/O pins•12 A/D and 12 D/A
Convertor Pins
Hameed Ebadi
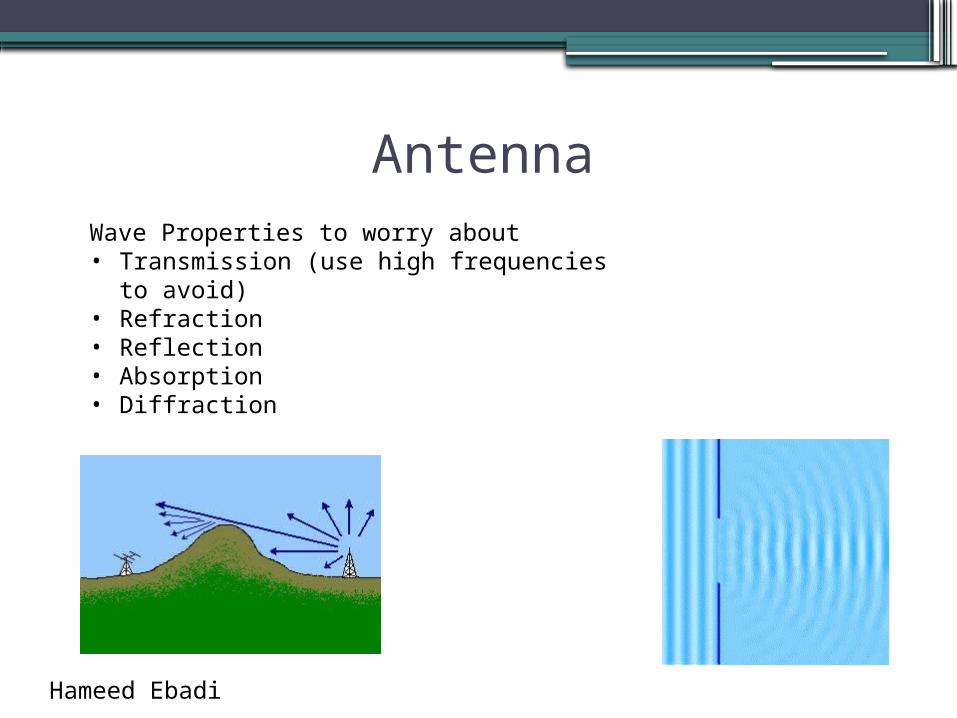
AntennaWave Properties to worry about• Transmission (use high frequencies to
avoid)• Refraction• Reflection• Absorption• Diffraction
Hameed Ebadi
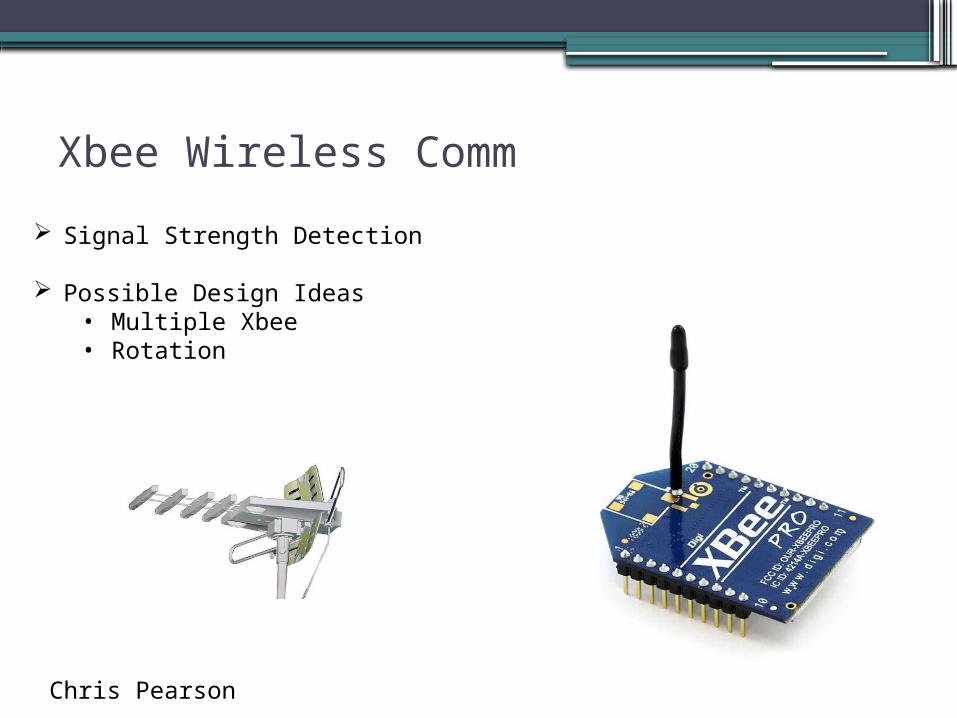
Xbee Wireless Comm
Signal Strength Detection
Possible Design Ideas• Multiple Xbee• Rotation
Chris Pearson
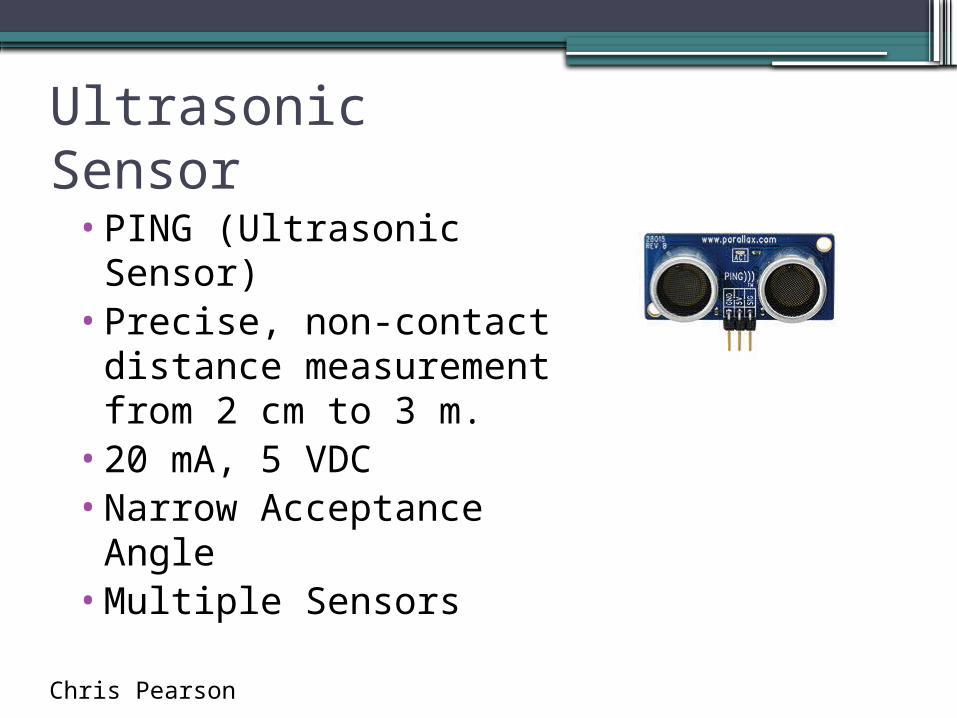
Ultrasonic Sensor
•PING (Ultrasonic Sensor)
•Precise, non-contact distance measurement from 2 cm to 3 m.
•20 mA, 5 VDC•Narrow Acceptance
Angle•Multiple Sensors
Chris Pearson
Power
•Motorcycle battery for robot main power•9v for remote beacon•Wall wart for base station
Chris Pearson
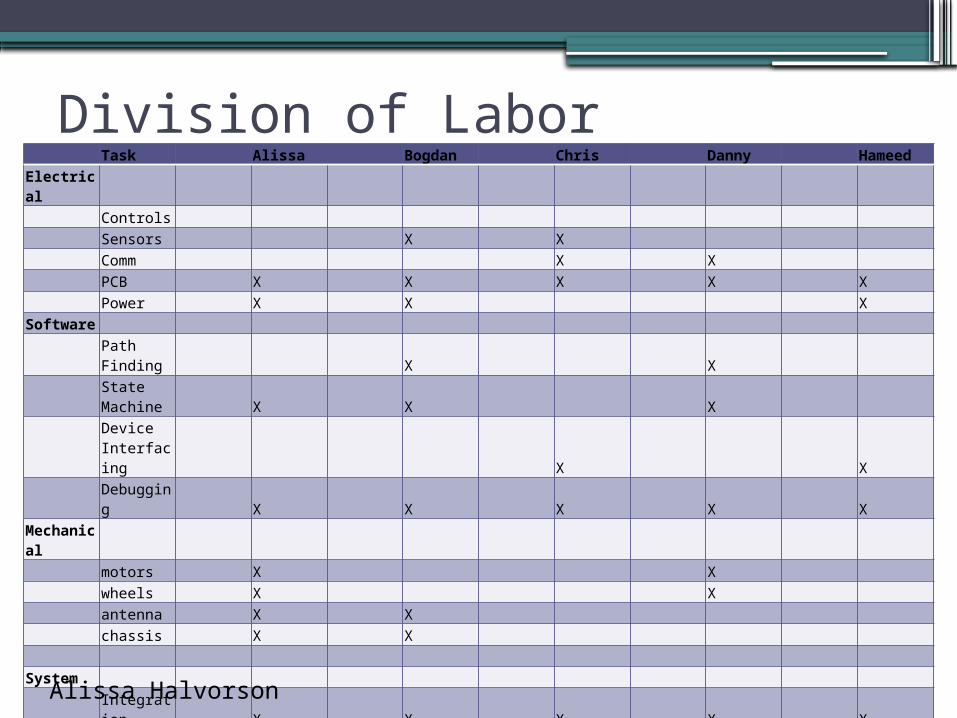
Division of Labor Task Alissa Bogdan Chris Danny HameedElectrical Controls Sensors X X Comm X X PCB X X X X X Power X X XSoftware
Path Finding X X
State Machine X X X
Device Interfacing X X
Debugging X X X X X
Mechanical motors X X wheels X X antenna X X chassis X X System
Integration X X X X X Testing X X X X X Documentation X X X X X
Alissa Halvorson
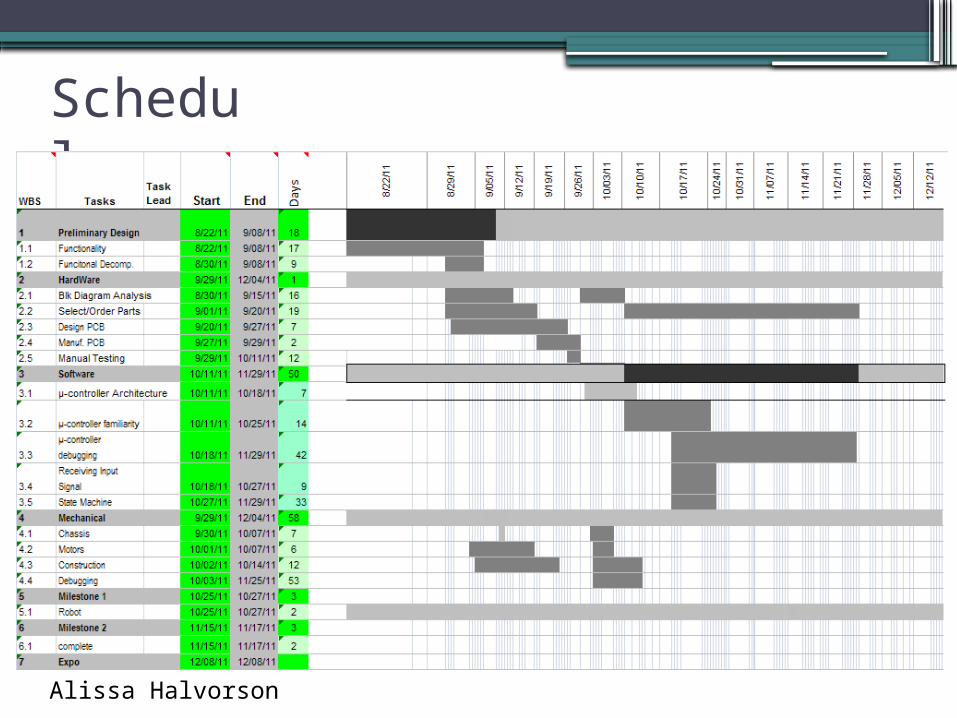
Schedule
Alissa Halvorson
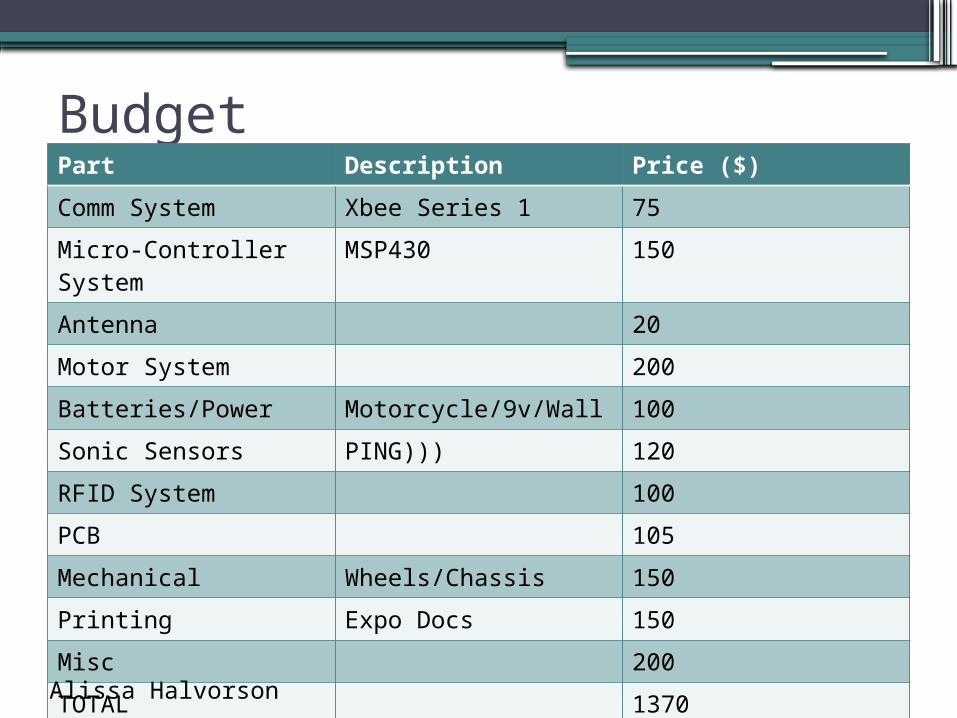
BudgetPart Description Price ($)
Comm System Xbee Series 1 75
Micro-Controller System
MSP430 150
Antenna 20
Motor System 200
Batteries/Power Motorcycle/9v/Wall 100
Sonic Sensors PING))) 120
RFID System 100
PCB 105
Mechanical Wheels/Chassis 150
Printing Expo Docs 150
Misc 200
TOTAL 1370
Alissa Halvorson
Funding
•UROP•Team Members•Donations•Scavenging
Alissa Halvorson
Risks and Contingency Plans
•Ultra-sonic sensors don't work or too much interference▫Use bump sensors
•Failure to detect beacon signal direction▫Use IR "line of
sight" sensors
•Run out of time or money▫Reduce
features/capability•Mechanical issues
▫Enlist mechanical major's help
Alissa Halvorson
Questions?





![Thank You Jeeves[1]](https://img.pdfslide.us/doc/110x75/577cb4a21a28aba7118c9733/thank-you-jeeves1.jpg)





![Carry on, Jeeves[1]](https://img.pdfslide.us/doc/110x75/55cf884555034664618f2ddf/carry-on-jeeves1.jpg)