-
8/2/2019 IV-99 London Solving Geometric Constraints
1/6
Solving Geometric Constraintsby a Graph-Constructive
Approach
Samy Ait-Aoudia, Brahim Hamid, Adel Moussaoui, Toufik SaadiINI -
Institut National de formation en InformatiqueBP 68M - Oued Smar
16270 ALGIERS ALGERIA
Tel : 213 2 51 60 33Fax : 213 2 51 61 56 Telex : 64531
E-mail : [email protected] , [email protected]
Abstract A geometric constraint solver is a major component of
recent CAD systems. Graph constructive solvers arestemming from
graph theory. In this paper, we describe a2D constraint-based
modeller that uses a graphconstructive approach to solve systems of
geometricconstraints. The graph-based approach provides means
for developing sound and efficient algorithms. We present a
linear algorithm that solves a large subset of the ruleand compass
constructive problems. Methods for handling over- and
under-constrained schemes are alsogiven.
Key Words: Computer aided design, constraints solving,geometric
constraints, graph-based solver, over- and under-constrained
schemes.
1. Introduction
In CAD (Computer Aided Design), geometricmodelling by
constraints enables users to describe shapesby specifying a rough
sketch and adding to it geometricconstraints. The constraint solver
derives automaticallythe geometric elements that are to be found.
Typical
constraints are : distance between two geometric elements(two
points, a point and a line, two parallel lines), anglebetween two
lines, tangency between a line and a circle orbetween two
circles
Many resolution methods have been proposed forsolving systems of
geometric constraints. We classify theresolution methods in four
broad categories : numerical,symbolic, rule-oriented and
graph-constructive solvers.
Numerical methods (Newton-Raphsons iteration,homotopy, gaussian
elimination and so on) are O(n 3) orworse (see [1,2,3,4]). Most
numerical methods have
difficulties for handling over- and
under-constrainedschemes.
Symbolic methods (Grbner bases, elimination withresultants) are
typically exponential in time and space (see[5,6]). They can be
used only for small systems.According to Lazard [7], computing the
Grbner bases of an irreducible system of degree two in ten unknowns
is ahopeless case.
Rule-based solvers rely on the predicates formulation(see
[8,9,10,11]). Although they provide a qualitativestudy of geometric
constraints, the "huge" amount of computations needed (exhaustive
searching andmatching) make them inappropriate for real
worldapplications.
Graph-constructive solvers are stemming from graphtheory. They
are based on an analysis of the structure of the constraint graph.
The graph constructive approachprovides means for developing sound
and efficientalgorithms (see [12,13,14]). Owen [15], Fudos
andHoffman [16], Lamure and Michelucci [17] givequadratic
algorithms for solving constrained schemes.
In this paper, we describe a 2D constraint-basedmodeller that
uses a graph constructive approach to solvesystems of geometric
constraints. We present a linear
algorithm that solves a large subset of the rule andcompass
constructive problems. We also give efficientmethods for isolating
over- and under-constrainedschemes.
This paper is organised as follows. The graphrepresentation of
the constraint problem is explained insection 2. We present in
section 3, the core algorithm thathandles structurally
well-constrained problems. The phasefor isolating over- and
under-constrained schemes isgiven in section 4. We describe in
section 5, ourconstraint-based modeller. Section 6 gives
conclusions.
-
8/2/2019 IV-99 London Solving Geometric Constraints
2/6
2. Constraints and graphs
2.1 Graph representation
Geometric modelling by constraints enables users todescribe
geometric elements such as points, lines, circles,line segments and
circular arcs by a set of requiredrelationships of distance, angle,
incidence, tangency,parallelism and perpendicularity. With some
pre-processing, the geometric elements are reduced to pointsand
lines, and the constraints to those of distance andangle (see
[18]).
We use an undirected graph G=(V,E) where |V|=nand |E|=m to
represent the constraint problem. Thegeometric elements are
represented by the graph nodesand the constraints are the graph
edges. The edges arelabelled with the values of the distance and
angledimensions.
Example 1 :A dimensioning scheme defining a constraint
problem is shown in figure 1. It involves six points andsix
lines. The constraints are six point-point distances,three
line-line angles, twelve point-line implicit distancesthat are
zero. The corresponding constraint graph isshown in figure 2. The
unlabeled edges correspond to theimplicit point-line distances.
A
B
C
D
E
F
d1 d2
d3
d4d5
d6
Figure 1. A constraint problem.
A
B
C
D
E
F
AB BC
CD
DEEF
AF
d1 d2
d3
d4d5
d6
Figure 2. The corresponding constraint graph.
2.2 Graph structure analysis
Let us now give some definitions concerning thestructural
properties of the constraint graph.
Definition 1A constraint graph G=(V,E) where |V|=n and|E|=m is
structurally well-constrained if and only if m=2*n-3 and m 2*n-3
for any inducedsubgraph G=(V,E) where |V|=n and |E|=m(see [ 19
]).
Definition 2A constraint graph G=(V,E) contains a
structurallyover-constrained part if there is an inducedsubgraph
G=(V,E) having more than 2*n-3edges.
Definition 3A constraint graph G=(V,E) is structurally
under-constrained if is not over-constrained and thenumber of edges
is less than 2*n-3.
Note that a constraint graph can have over- andunder-constrained
parts. An example is shown in figure 3.
Figure 3. Over- and under-constrained parts.
The graph constructive approach uses only thestructure of the
constraint graph and forgets numericalinformations. A constraint
graph can be structurally well-constrained but numerically under
constrained. Thedimensioned scheme shown in figure 4 (left)
isnumerically under-constrained (the edges are labelledwith
distance arguments). Its corresponding constraintgraph shown in
figure 4 (right) is structurally well-constrained.
A B
C
1
0
D
1
1
1
D
A B
C
Figure 4. An under-constrained problem (left),and its associated
constraint graph (right).
Nonetheless, with the graph constructive approach,such cases
will be detected during the construction phase.
-
8/2/2019 IV-99 London Solving Geometric Constraints
3/6
3. Solving the constraints
3.1. Basic clusters formation
The first phase of the algorithm is the formation of what we
call "basic clusters". A cluster is a rigidgeometric structure
whose elements are known relativelyto each other. A basic cluster
is obtained by the algorithmgiven below. The nodes (geometric
elements) and theedges (geometric constraints) are initially
unmarked.
Algorithm :1. Pick an unmarked edge (constraint) ;
Mark the edge ;Pin the two geometric elements related by
theconstraint being marked ;Mark the two geometric elements to
belong to anew basic cluster BCi(the two geometric elements are now
known).
2. Repeat the following :if there is a geometric element with
two
unmarked constraints related to knownelements
then mark the two constraints ;mark the geometric element to
belong to thebasic cluster Bci ;place this element by a
constructive step (thisgeometric element is now known).
The placement steps correspond to standardisedgeometric
construction steps (place a point at givendistances from two
points, place a line at prescribed anglefrom another line through a
point, ). When placing ageometric element, our solver uses some
rules to choosethe "best" solution. We assume that the
constraintproblem has been specified by a user-prepared sketch.The
distance and angle arguments are signed quantities.The solution,
automatically chosen, is the one thatpreserves the topological
order given by the sketch. If these rules fail, the solutions are
browsed and the user
selects one of them.To form all the basic clusters steps 1 and 2
arerepeated until no unmarked edge can be found. The goalis to
systematically visit all the edges of the constraintgraph.. Step 2
uses a recursive procedure to form a basiccluster. During this
step, we check the unmarked edgesrelated to known elements of the
basic cluster beingconsidered to see if two of them lead to a same
node. If sothis node is added to the basic cluster and the
edgesmarked. The first phase can be computed in linear timeusing a
simple variation of depth first search. Each clusteris placed in a
local co-ordinate system. Note that ageometric element can belong
to several basic clusters.
Example 2 :To illustrate the process, consider the
constraint
graph of figure 2. Three basic clusters are found C1, C2and C3
(see figure 5). The geometric elements B, D and Fbelong each to two
clusters : the point B to (C1,C3), thepoint D to (C2,C3) and the
points F to (C1,C2).
A
B
C
D
E
F
AB BC
CD
DEEF
AF
d1 d2
d3
d4d5
d6
C1
C2
C3
Figure 5. Clusters of the graph.
3.2. The skeleton of the constraint graph.
The second phase of the algorithm is to construct theskeleton of
the constraint graph. The skeleton is a graphGs=(Vs,Es) which is
obtained by the algorithm givenbelow.
Algorithm :1. The nodes Vs of the skeleton are the nodes of
the
constraint graph that belong to several basicclusters (these
nodes are marked with at least twobasic clusters names).
2. The edges Es of the skeleton are obtained asfollows :Es=;For
each basic cluster CiDo pick the nodes {N1,N2, ,Nj} of Ci that
belong to Vs;triangulate the set {N1,N2, ,Nj} by doing:
Add* edge (N1,N2) to Es;For k=3 to jDo Add* edges (Nk,Nk-1)
and
(Nk,Nk-2) to Es;
If an added edge (s,t) to Es is not a member of theinitial set
of constraints then we insert a "virtual"
-
8/2/2019 IV-99 London Solving Geometric Constraints
4/6
constraint whose value is easily determined because thenodes s
and t belong to a rigid structure (a basic cluster).
The graph skeleton (of problems solved by ouralgorithm) is a
basic cluster. All its nodes are placed inthe plane. The skeleton
can be empty if the constraintgraph consist of only one basic
cluster (the finalconfiguration is then directly obtained).
Example 3 :To better illustrate this phase, consider the
constraint
graph of figure 2. His skeleton is given in figure 6. All
theedges of this skeleton are virtual constraints.
B
DF
Figure 6. Skeleton of the previous constraintgraph .
Example 4 :Another constraint graph (the basic clusters are
alreadyformed) and its corresponding skeleton are shown infigure
7.
(a)
(b)
Figure 7. A constraint graph (a), and itscorresponding skeleton
(b).
3.3. Final computation phase
Once the nodes of the skeleton are placed(computed), each
cluster is positioned relatively to theskeleton by computing the
three required parameters (twotransitional and one rotational).
Note that each basic
cluster share with the skeleton at least two nodes. Thefinal
scheme is then obtained.
Example 5 :After placing the skeleton of the constraint
graph
given in figure 2, the three found basic clusters C1, C2and C3
are positioned (rotated and translated) relatively tothis skeleton
(see figure 8).
B
DFC1
C2
C3
Skeleton
FD
D
B B
F
Figure 8. Placing the clusters.
4. Handling over- and under-constrainedschemes
When designing, the first time, the sketch of a
dimensioning scheme, the user often, over-constrains
andunder-constrains some geometric elements. Giving thefollowing
message "your constraint graph is over- orunder-constrained" to the
user when the graph containsmore than 100 nodes is not sufficient.
The "lazy" user(not only him) wants a message like "the point P 99
is over-constrained and the line L 24 is under constrained" so
hecan easily remove or add geometric constraints.
Detecting over- and under-constrained geometries ina constraint
graph is an important part of a "good"constraint-based
modeller.
By adding some extra checking to the algorithm of
section 3.1, we can detect the extra-constraints in thesame time
bound. The extra-constraints are the constraintswe shall remove so
that the constraint graph will be wellconstrained. Before marking a
constraint in step 1, we testif the two geometric elements related
by this constraintbelong to a same basic cluster. If so, the
consideredconstraint is necessarily an extra-constraint (a
basiccluster is a rigid geometric structure, so if we add
anotherconstraint between two of its nodes it become
over-constrained). This constraint is removed and is notconsidered
further.
-
8/2/2019 IV-99 London Solving Geometric Constraints
5/6
Example 6 :Consider the constraint graph given in figure 9
(left).
We can have the marking shown in figure 9 (right). Thecrossed
out edges belong to a basic cluster. The unmarkededge AC is the
extra-constraint (the nodes A and Calready belong to a basic
cluster). Note that this markingis not unique.
D
A B
C D
A B
CFigure 9. An over-constrained scheme.
Detecting under constrained schemes is a two steps
process. First, we test the number of "links" between thebasic
clusters and the skeleton graph (we assume that theconstraint graph
is connected). A basic cluster B that islinked to the skeleton by
one node N can move relativelyto this skeleton. We must add a
constraint, that do notinvolve the node N, between the cluster B
and anothercluster of the constraint graph so that the cluster B
will be"firmly" attached (see example 7). In the second step,
weform the basic clusters BCSi of the skeleton (if theskeleton is
under-constrained we will have more than onebasic cluster) and
construct the meta-skeleton (skeleton of the initial skeleton). We
then apply the first step to theBCSi and the meta-skeleton (see
example 8).
Example 7 :Consider the constraint-graph of figure 10. The
basic
clusters are : C1, C2, C3 and C4. In this example theskeleton is
well-constrained.
C1 C2
C3
A
B C
C4Figure 10. An under-constrained scheme.
The cluster C3 is linked to the skeleton by one node(the node
C). We must add a constraint, that do notinvolve the node C,
between the cluster C3 and anothercluster (C1, C2 or C4) so that
the entire configuration willbe well constrained.
Example 8 :Consider the skeleton graph given in figure 11.
A
B
C
D
EFigure 11. An under-constrained skeleton
This skeleton is under-constrained. The meta-skeleton is reduced
to the node C. A constraint (that doesnot involve the node C) must
be added between the twobasic clusters of the skeleton so that it
becomes wellconstrained.
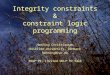
5. A 2D constraint based modeller
We have implemented an experimental 2Dconstrained based modeller
in C++ on an IBM PCcompatible machine (CPU Pentium, 200 MHz and 32
Moof RAM). The user creates points, lines, circles andspecify
constraints in an interactive way. The user canhave directly the
final solution (if there is one) of theconstraint problem. He can
also follow the resolutionprocess step by step (clusters formation,
visualisation of the skeleton). When the solver detect over- or
under-constrained schemes, a message is delivered to the user
showing him what he must do (adding or removingconstraints
between specified geometries).For all configurations we have
tested, our algorithm
is faster than those of Owen[15] and Fudos [16]A screen dump of
a scheme solved by our algorithm
is given in figure 12. This scheme involves seventeencircles,
five points and four lines. The constraints arethirty one
circle-circle distances, three line-circledistances and two
point-circle distances that are zero, twopoint-point distances,
three line-line angles, eight point-line implicit distances that
are zero.
6. Conclusion
We have described and implemented a linearalgorithm that solves
a system of geometric constraintsusing a graph constructive
approach. The class of configurations solved is a large subset of
the rule andcompass constructive problems. Over- and
under-constrained schemes are also handled by this algorithm.
Our current interest is to extent the scope of thesolver while
keeping the same time bound for the corealgorithm.
-
8/2/2019 IV-99 London Solving Geometric Constraints
6/6
Figure 12. A screen dump of a constrained scheme
References
[1] D. Serrano. Automatic Dimensioning in Design for
Manufacturing. Symposium on Solid Modeling Foundationsand CAD/CAM
Applications, 1991, pp. 379-386.
[2] E.L. Allgower and K. Georg. Continuation and path following
. Acta Numerica , pages 1-64, 1993.
[3] A. Perez and D. Serrano. Constraint base analysis tools for
design. Second Symposium on Solid Modeling Foundationsand CAD/CAM
Applications, Montreal Canada. May 93.pp. 281-290.
[4] H. Lamure and D. Michelucci. Solving constraints byhomotopy.
Symposium on Solid Modeling Foundations andCAD/CAM Applications.
May 95. pp. 263-269.
[5] K. Kondo. Algebraic method for manipulation of dimensional
relationships in geometric models. ComputerAided Design, 24 (3),
pp. 141-147, March 1992.
[6] R. Anderl and R. Mendgen. Parametric design and itsimpact on
solid modeling applications . Symposium on SolidModeling and
CAD/CAM Applic. May 95. pp. 1-12.
[7] D. Lazard. Systems of algebraic equations : algorithms and
complexity. Rapport interne LITP 92.20, Mars 92.
[8] G. Sunde. Specification of shape by dimensions and other
geometric constraints. Geometric modeling for CADapplications, pp.
199-213. North-Holland, IFIP, 1988.
[9] H. Suzuki, H. Ando and F. Kimura. Variation of
geometriesbased on a geometric-reasoning method. Computer
andGraphics, 14(2), pp. 211-224. 1990.
[10] P. Schreck. Modlisation dune figure gomtrique adapteaux
problmes de constructions. Actes des journesGROPLAN91, France
1991.
[11] A. Verroust, F. Schonek and D. Roller. Rule-oriented method
for parametrized computer-aided design. ComputerAided Design, 24
(3), pp. 531-540, Oct. 1992.
[12] S. Ait-Aoudia, R. Jegou and D. Michelucci. Reduction of
constraint systems . In Proceedings of Compugraphics,(Alvor,
Portugal), pp. 83-92, 1993.
[13] W. Bouma, I. Fudos, C.M. Hoffman, J. Cai, R. Paige.
Ageometric constraint solver. Computer Aided Design, Vol.27, No.6,
June 1995, 487-501.
[14] I. Fudos. Constraint solving for computer aided
design.Ph.D. Thesis, Dept. of Computer Science, PurdueUniversity,
Aug. 1995.
[15] J.C. Owen. Algebraic Solution for Geometry from Dimensional
Constraints. Symposium on Solid ModelingFoundations and CAD/CAM
Applications, 1991, pp. 397-407.
[16] I. Fudos, C.M. Hoffman. A Graph-Constructive approachto
Solving Systems of Geometric Constraints. ACM Trans.on Graphics,
Vol. 16, No. 2, April 1997, 179-216.
[17] H. Lamure and D. Michelucci.Qualitative study of
geometric constraints. Geometric Constraint Solving
andapplications, B. Brderlin and D. Roller editors,
Springer-Verlag, 1998.
[18] I. Fudos. Editable representation for 2D geometric
design.Masters thesis, Dept. of Computer Science, PurdueUniversity,
Dec. 1993.
[19] G. Laman. On graphs and rigidity of plane
skeletalstructures. Journal of Engineering Mathematics, vol. 4,
num.4, pp. 331-340, Oct. 1970.