Embed Size (px)
Citation preview

216 The Physics Teacher ◆ Vol. 49, April 2011 DOI: 10.1119/1.3566029
gins by observing that a steady precession is a particular, i.e. special, solution to the equations of motion, and in the general case there will be wobbling or nutation about the mean hori-zontal trajectory. He then gives a brief account of the torque and forces (or absence of such) that initiate and govern the nutation. This part is not particularly intuitive or transparent and is reminiscent in style to an argument that has been criti-cized as erroneous in a related context.6 Nevertheless, at the end Feynman clearly states and emphasizes that the spin axis has to drop vertically (dip), so that the total angular momen-tum of the system is conserved. In other words, the apparent paradox is easily resolved if, in addition to the assumption
In this paper we show that with the help of accessible, teaching-quality equipment, some interesting and impor-tant details of the motion of a gyroscope, which are typi-
cally overlooked in introductory courses, can be measured and compared to theory. We begin by deriving a simple relation between the dip angle of a gyroscope released from rest and its precession velocity. We then describe an experi-ment that measures these parameters. The data are in excel-lent agreement with the theoretical prediction. The idea for this project was suggested by the discussion of gyroscopic motion in The Feynman Lectures on Physics. Feynman’s (Fig. 1) conclusion (stated in colloquial language and quoted in the title) is confirmed and, in addition, conservation of angu-lar momentum, which underlies this effect, is quantitatively demonstrated.
IntroductionGyroscopic motion is discussed in almost all introductory
physics texts1-3 using the example of a rapidly spinning heavy wheel, or disk, whose axis of spin is typically along the hori-zontal direction. The disk is released from rest and, due to the torque imparted to it about the pivot by its uncompensated weight, quite counterintuitively escapes a vertical fall, and in-stead begins a steady precession about the vertical axis. In the analysis of this effect, certain approximating assumptions are usually made. Those include a very large spin angular momen-tum, so that the tip of the spin vector remains in the same hor-izontal plane, as well as little or no friction at the vertical and spin axle bearings (this guarantees a low rate of attenuation).
The analysis is brief and logical, and yet to the more thoughtful student it should appear problematic. Here’s why. After steady precession is established, one easily sees that it corresponds to angular momentum in the vertical direction (albeit small compared to the spin component). This change from none to some angular momentum can only be due to a non-negligible torque along the vertical. But no such torque exists, as can easily be verified from the cross-product rule [Fig. 2(a)]. It seems that in the approximation needed for es-tablishing a steady precession, we may have thrown out the baby with the bathwater and ended up with a small paradox. That precession is at all possible, given the logical contradic-tion indicated above, and not simply its counterintuitive na-ture, is what Richard Feynman jokingly refers to as a “miracle” and then attempts to demystify in his discussion of this topic in The Feynman Lectures on Physics4,5 (FLP for short). He be-
‘It Has to Go Down a Little, in Order to Go Around’– Revisiting Feynman on the GyroscopeSvilen Kostov and Daniel Hammer, Georgia Southwestern State University, Americus, GA
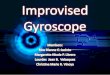
Fig. 2 (a) Basic parameters in the torque induced precession of gyroscope. The external torque (t = r × mg) is in the x-y plane and into the page. (b) Precession and decaying nutation. The dip angle, Δq, is indicated. (c) Relation between initial and final spin angular momentum, after nutation has died out.
Fig. 1. Richard Feynman with a demonstration gyroscope dur-ing lecture. (courtesy of the Archives, California Institute of Technology)

The Physics Teacher ◆ Vol. 49, April 2011 217
Rewriting angular momentum in terms of angular velocity and moment of inertia, the above equation becomes:
Wl1 = ω l3Dq, (4)where l1 is the moment of inertia about the vertical axis. For a thin disk it can be computed using the parallel axis theo-rem to be
(5)
If in Eq. (1) we express ω in terms of W and substitute it into Eq. (4), we obtain a simple relation between the dip angle (the “going down”) and the precession velocity (characterizing the “going around”):
(6)
In other words, in the case of large spin velocity, the dip angle should be proportional to the square of the precession velocity if total angular momentum is to be conserved.
An experimental testExperimental investigations of gyroscopic motion at the
teaching level are not new and some have been remarkably clever.11 Current digital technology has allowed for a qualita-tive leap in both the precision and the plug-and-play quality of the measurements. For the purpose of this experiment, we have used only off-the-shelf equipment, beginning with a demonstration gyroscope from PASCO (Fig. 3). We added two PASCO digital angle sensors, which allow the simultane-ous measurement of j(t) and of q(t) [Fig. 2(a)]. The preces-sion velocity ω is easily obtained as the j(t) sweep rate. The gyroscope disk was accelerated to exact initial spin velocities using a battery-powered drill with a rubber tip. The values were calibrated by observing the motion of a small dot on the disk while it was illuminated by a digital strobe light set at spe-cific frequencies. Aliasing effects were taken into account in determining when the exact rotational frequency was reached so that the top could be released.
The data were collected at a sample rate of 1/50 s using the
of the initial spin angular momentum changing direction in the horizontal plane one allows a change in the vertical. This effect was, of course, well known prior7 to the publication of the FLP but had somehow disappeared from the introductory literature over time. It is a testament to the great physicist’s brilliant pedagogical sense that he chooses to reintroduce it in his book. Surprisingly, with few exceptions,8 it seems to have been “forgotten” yet again for the past 40 or so years.9 In the following discussion our intention is to remind the physics teaching community of this effect and to show that it can be easily verified with the current teaching-quality equipment.
A simple model for the dipping gyroscopeWe approximate the gyroscope by a heavy thin disk on a
massless axle [Fig. 2(b)]. It is prepared with a large angular velocity (at least several hundred rpm, so that it is a true gy-roscope) along the horizontal axis x and then released from rest. It begins to undergo both precession and nutation. The angular velocity for a constant steady precession (assuming no dip) is derived in most introductory texts1-4 by examining the torque acting on the falling disk and the induced incremental change of the angular momentum vector in the horizontal plane. It is inversely related to the spin angular velocity and given by the well-known formula
(1)
where m is the mass of the disk, r the distance from the ver-tical axis, ω the spin angular velocity about the horizontal axis, and λ3 the moment of inertial of the disk about the horizontal spin axis. For a thin disk,
(2)
where R is the radius of the disk. It is important to note that the (constant) precession velocity in the steady case will equal the average velocity of the same disk undergoing nuta-tion about a (lower) mean vertical position if the disk has the same spin velocity upon release.4,10 In the first case the disk is released with an initial angular velocity prepared equal to W, while the second is the general case for which the initial velocity is arbitrary and includes rest.
As the disk undergoes nutation, the amplitude of the oscil-lations will decay due to friction in the bearings, and eventu-ally the gyroscope will settle to a constant precession with its axis having dipped slightly below the initial level at an angle of Dq, which we will refer to as the dip angle [Fig. 2(b)]. It is clear that for small dip angles, the original spin angular mo-mentum vector retains its magnitude; L ≈ L0 [Fig. 2(c)], where L0 is the initial and L is the final angular momentum along the spin axis.
A small downward vertical component, DL, arises as the difference between the two. Of course, such a component has to be nullified (absence of external torque along the vertical) by a corresponding one in the upward vertical direction: –DL, which is precisely what is needed to account for the preces-sion. For the magnitude of the latter we have:
DL ≈ L0Dq. (3)
Fig. 3. The experimental setup: A. Demonstration gyroscope (PASCO) with two digital rotational sensors. B. Mini drill (Dremel) with rubber head to accelerate disk to target rpm values. C. Digital stroboscope (Extec Instruments) to measure initial spin rate by observing aliasing pattern of spot on disk. D. Supporting stands. E. Data acquisition device (Explorer from PASCO).

218 The Physics Teacher ◆ Vol. 49, April 2011
It is important to note that the dip of the spin axis is not the result of loss of spin angular momentum at the axle bearings. PASCO claims that the gyroscope will lose half spin in about six minutes,12 while our data were gathered in less than 10 s for each run.
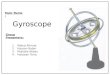
A plot of the dip angle Dq against W2, corresponding to the different spin velocities (in decreasing order from left to right), shows a linear dependence, as expected (Fig. 5). The slope of the graph agrees with the values of the parameters in Eq. (6) within 2%, which is consistent with an estimate of the error propagation. It is clear that if one extrapolates to the ori-gin, the precession velocity should vanish along with the dip angle. This corresponds to the limiting case of an infinite spin angular momentum vector, which resists movement in the horizontal plane imparted via the gravitational torque. In such a case the system is stationary and undergoes neither preces-sion nor nutational motion.
ConclusionsThe work described in this paper was suggested to us
from the discussion of gyroscope motion in the FLP. We have measured the asymptotic dip angle of a gyroscope released from rest and found that it relates to the precession velocity in excellent agreement with what is predicted from a simple, approximate theoretical model based on conservation of angular momentum. This result complements the conven-tional analysis of gyroscopic motion given in most texts. It is important in two ways. First, it indicates that neglecting the dip is equivalent to neglecting the precession velocity; second, it “demystifies” precession, as emphasized by Feynman and others, and places it in a proper general context, namely, con-servation of angular momentum. We consider this project to be an interesting and seamless extension of the conventional analysis of gyroscope motion at the introductory physics level. It can also serve as a bridge between the elementary and more advanced detailed treatments of this phenomenon, suitable for higher level mechanics courses.13-15 It is also one of the few lab projects at the undergraduate level, that we are aware of, for exploring angular momentum.
AcknowledgmentsThe authors would like to thank the Department of Geology and Physics at Georgia Southwestern State University for supporting this project. We also wish to thank Jason Klein for his help in one of the experiments and Mariyana Kostova for her help with the figures. In addition, we would like to express our thanks to the anonymous reviewers of our man-uscript for their helpful comments and suggestions. Finally, we would like to thank Wolfgang Christian for tailoring his superb gyroscope simulation demo to our paper and allow-ing the described experiment to be performed virtually!
References1. R. A. Serway, Physics for Scientists and Engineers, 6th ed.
(Thomson/Brooks/Cole, 2009), p. 350. 2. P. A. Tipler and G. Mosca, Physics for Scientists and Engineers,
handheld Explorer device from PASCO. (During the prepara-tion of the manuscript, it was brought to our attention that Vernier’s LabPro accepts two RMD inputs as well, so this ex-periment is not limited to the use of PASCO equipment.)
Data for the precession angle j(t) and corresponding nuta-tion angle q(t) were obtained for seven different spin veloci-ties: 400 rpm, 600 rpm, 800 rpm, 1000 rpm, 1200 rpm, 1400 rpm, and 1600 rpm. In all the runs, the initial preces-sional velocity was j.(0) = 0 and the initial azimuthal angle q(0) = π/2. Plots of some of the experimentally obtained curves, j(q), are given in Fig. 4. It is evident that at high spin values (only shown for 1400 rpm), the attenuation of the nuta-tion is rapid and the top quickly settles to a final value for q. At lower spin velocities, the nutation persists over many periods of oscillation, so we have approximated Dq with one half the maximum excursion in theta. The decay of the nutation is a complex and open question in general. Nevertheless, we con-sider the half maximum to be a very reasonable and accurate approximation to the final asymptotic value of the dip angle, as can be seen in Fig. 4 in the case of a spin rate of 1400 rpm.
1.55
1.60
1.65
1.70
1.75
1.80
1.85
1.90
1.95
0 1 2 3 4 5
Nut
atio
n An
gle-
θ(ra
d)
Precession Angle- φ ( rad)
600 rpm
1000 rpm
1400 rpm
Δθ
Fig. 4. Experimental j vs q curves for three different spin velocities. Attenuation is significant at the highest spin value. Dip angle for this (1400 rpm) case is shown.
Slope = 0.0212 s2
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0 2 4 6 8 10 12 14 16
Δθ
[rad]
Ω2 [s-2]
ω = 400 rpm
ω =1600 rpm
Fig. 5. Dip angle (Δq) plotted against the square of the precessional
velocity (Ω2). The slope is in excellent agreement with ,, where
l1 = 0.052 ± 0.001 kg/m2, m = 1.700 ± 0.010 kg, r = 0.145 ± 0.002 m, and g = 9.81 m/s2
.

The Physics Teacher ◆ Vol. 49, April 2011 219
The first may be considered more transparent and causal while the second less so. Of course, the conservation principle is extremely useful precisely when the exact equations of motion and their solutions are non-trivial.
10. E. Butikov, “Precession and nutation of a gyroscope,” Eur. J. Phys. 27, 1071–1081 (2006).
11. J. R. Prescott, “Demonstration gyroscope,” Am. J. Phys. 31, 393 (1963).
12. PASCO Gyroscope, Features and Specs; store.pasco.com/pascostore/showdetl.cfm?&DID=9&Product_ID=1679&page=Features.
13. J. R. Taylor, Classical Mechanics (University Science Books, 2005), p. 403.
14. F. Y. Wang, Physics with MAPLE (Wiley-VCH, 2006), p. 118. 15. S. Kostov, www.compadre.org/Repository/document/ServeFile.
cfm?ID=10022&DocID=1655.
Svilen Kostov is an associate professor of physics at the Department of Geology and Physics, Georgia Southwestern State University. He received his PhD from the City University of New York and has worked in advanced battery research and semiconductor technology. His interests include the history and philosophy of physics. [email protected]
Daniel Hammer is a Dual Degree student at Georgia Southwestern State University who is currently completing his degree in mechanical engineer-ing at Georgia Tech. Daniel built and tested model rockets when he was a boy and built and raced fast cars as a teenager, showing a clear prefer-ence for experiment over theory.
5th ed. (Freeman and Co., 2004), Vol. I, p. 316. 3. D. C. Giancoli, Physics for Scientists and Engineers, 3rd ed.
(Prentice Hall, 2000), Vol. I.4. R. Feynman, R. Leighton, and M. Sands, The Feynman Lectures
on Physics (CIT, 1963), Vol. I, p. 20-7. 5. Feynman’s fascination with rotational motion has become
known through his autobiographical books and interviews. An interesting exploration of one of his ideas on this topic can be found in S. Tuleja et al., “Feynman’s wobbling plate,” Am. J. Phys. 75, 240–244 (2007).
6. M. S. Tiersten and H. Soodak, “Propagation of a Feynman error on real and inertial forces in rotating systems,” Am. J. Phys. 66, 810–811 (1998).
7. H. Crabtree, M. A., An Elementary Treatment of The Theory of Spinning Tops and Gyroscopic Motion, 2nd ed. (Longmans, Green and Co. 1914), p. 61 (available on http://books.google.com/).
8. R. Jakeways, “Towards an understanding of gyroscopic mo-tion,” Phys. Educ. 3, 79 (1968). This paper discusses the same effect from mostly an energy point of view.
9. We do not know why almost no introductory textbook (Wolf-son and Pasachoff ’s Physics, Addison-Wesley, 1999, is an ex-ception) mentions the dip of a gyroscope released from rest in the context of angular momentum conservation. It might be because the authors are reluctant to mix the derivation of the precession velocity (a straightforward dynamical differential relation) with a conservation principle (an integral of motion).
The Gyroscope model in the OSP ComPADRE Collection simulates the dynamics of a gyroscope under the influence of a gravitational torque acting on the center of mass. It is a supplemental simulation for the pre-ceding article by Svilen Kostov. The gyroscope is supported at one end and given an initial angular velocity component about its axis of symmetry and a component perpendicular to its axis of symmetry. Although the model is designed to show the cycloidal motion (precession and nutation) of the gyroscope axle when the initial angular velocity is large, the numerical solution shows the motion for all initial conditions, including zero initial angular momentum. Users can vary the position and radius of the spin-ning mass as well as the initial angle. The vectors checkbox displays the angular momentum L, angular velocity ω, and torque N vectors.
Units are chosen such that the total mass M and the acceleration of grav-ity g are one. The rotor is an ellipsoid with a uniform mass distribution and with major axes 2*R and minor axis R/5. A second window shows the elevation angle of the axle and the angular momentum vector to allow users to test analytic expressions in Kostov’s paper.www.compadre.org/OSP/items/detail.cfm?ID=10681
The Free Rotation model shows the torque-free motion of a rectangular block. This model is designed for the study of torque-free precession and displays a space frame view showing the constant angular momentum and a tumbling block with its body-axis arrows. The tips of the body frame axis arrows trace trajectories to illustrate stable and unstable rota-tion of the block about a principal axis. A second window displays the body frame view with space frame xyz-axes orbit-ing the block.www.compadre.org/OSP/items/detail.cfm?ID=10683
Related items for these models can be found in the OSP Collection by searching for “rotational dynamics.”These supplemental simulations for the preceding paper have been approved by the author and the TPT editor. Partial funding for the development of this model was obtained through NSF grant DUE-0937731. –Wolfgang Christian