Embed Size (px)
Citation preview

Implementation of Adaptive filtering algorithms for
removal of Noise from ECG signal
Pramod R. Bokde Nitin K. Choudhari
Department of Electronics Engg. Department of Electronics & Communication Engg.
Priyadarshini Bhagwati College of Engg. Priyadarshini Bhagwati College of Engg.
Nagpur, India Nagpur, India
[email protected] [email protected]
Abstract :
Electrocardiography (ECG) is a non-invasive technique which
is used for reading the electrical activity of the heart. It can be
detected by several electrodes attached to the body surface and
recorded using an external electronic circuit. This real noise free
ECG signal can be used to detect different heart diseases, but a
recorded ECG signal is not noise free. Noise existing in ECG
signals can be removed using analog devices or using digital
filters. As computational microprocessor power increases, the
need to remove noise has been shifted to the use of digital filters.
One of the very effective digital filters to remove the ECG noise is
adaptive filtering techniques. In this paper, several adaptive
filtering algorithms are proposed for noise cancellation of ECG
signals and determining the accuracy of ECG signal features.
Different adaptive filter algorithms used in this research work re
Least Mean Square (LMS), Normalized Least Mean Squares
(NLMS), Kernel Least Mean Squares (KLMS) and Normalized
Kernel Least Mean Squares(NKLMS). The main focus of this
paper is to compare the performance of the proposed kernel
adaptive filter to already existing least mean squares filter and
demonstrates usage of different adaptive filtering techniques to
cancel noise sources from an ECG signal and to accurately detect
its characteristics.
Keywords:
Artifact, Kernel, Accuracy, Baseline wander, PLI, QRS Complex, Adaptive filters etc.
I. INTRODUCTION
Electrocardiography (ECG) records the electrical activity
of the heart. It can be detected by several electrodes attached
to the different positions of the body and recorded by using
an external electronic device. It is used as a test to gather
information about different heart diseases. A typical ECG
signal consists of a P-wave, a QRS complex and a T-wave.
Figure 1 below shows the standard noise free ECG signal.
Figure 1 : Standard ECG Signal
ECG noise is contributed by environmental and biological
sources. In this paper, the cause of each noise source along
with the methods to eliminate the noise will be discussed.
1.1. Power Line Interference : It is an environmental
noise in the ECG that results from poorly grounded
ECG recording machine. Because of the alternating
feature of the current, this noise appears at 50 Hz
and its harmonics. For removal of this type of noise,
Type I adaptive filter is used to subtract 50 Hz
sinusoidal from ECG signal.
1.2. Baseline Wander : Baseline drift is a biological
noise that appears in ECG signal. In this noise, an
iso-electric line shifts its position. It can be caused
by moving electrodes, patient movement, improper
electrode contact etc. during recording of ECG
signal. The adaptive filter that is used to remove this
noise is a special case of notch filtering, with a
notch at zero frequency to remove 0-0.5 Hz
frequencies. For removal, type I filter is used with
reference noise.
1.3. Motion Artifact :This is most difficult biological
noise to cancel. The spectrum of this noise is broad
and it completely overlaps the ECG signal
spectrum. Linear filtering methods are unable to
remove this noise source. Adaptive filter can
eliminate this noise source by having the adaptive
filter reference input set to an impulse value of 1
that corresponds to the beginning of the P-wave. In
this way, adaptive filter only subtracts the P-QRS-T
Pramod R Bokde et al, Int.J.Computer Technology & Applications,Vol 6 (1),51-56
IJCTA | Jan-Feb 2015 Available [email protected]
51
ISSN:2229-6093

complex from the signal and the remainder will be
motion artifact. Adaptive filter type- I is used to
subtract this noise from the ECG.
1.4. Muscle Artifact : Muscle artifact or
electromyography (EMG) comes under the
biological noise that appears in the ECG signal.
EMG is an electrical potential generated by muscle
cells when the cells are neurologically or
electrically activated. Muscle artifact can be
produced by unwanted reaction to electrodes. To
reduce this type of noise, typically more than one
ECG lead is used while recording. Type-I adaptive
filter applied for motion artifact will also remove
EMG from signal.
1.5. Instrumentation Noise : This is environmental
noise source which is generated by hardware that is
used for recording of the ECG signal. This noise
can be removed using Low noise Amplifiers , hence
no digital filtering is needed.
A typical noisy ECG signal can include one or more
artifacts described above.
II. ADAPTIVE FILTERS
There are two basic filter structures for adaptive filters :
Type- I and Type- II.
Type-I adaptive filter structure is as shown in figure 2 below:
Figure 2 : Type-I adaptive Filter Structure
In this type-I filter structure, primary input signal S1 with
noise n1 and reference input noise n2, which may be power
line interference, baseline wander etc and it is correlated with
n1. Both noise sources n1 and n2 should not be correlated
with the signal S1. The output of the filter is y and filter error
is e = (S1 + n1) – y . The weight function W is updated every
iteration and the basic structure for the weight function is,
New Weight = Old Weight + adjustments …… (1)
The type-II adaptive filter structure is as shown in figure 3
below :
Figure 3 : Type-II adaptive Filter Structure
Type-II adaptive filter structure, unlike filter structure 1,
has S2 as its reference signal, has primary input is signal S1
with additive noise n1 and reference input is noise S2, which
may be the clean noiseless ECG signal and it is correlated
with S1. As the nature of ECG signal is non-linear, this
adaptive filter structure cannot be used to remove noise
sources from the ECG signal.
III. LEAST MEAN SQUARES (LMS) ALGORITHM
LMS filter working is based on finding the filter
coefficients that leads to minimizing the mean square of the
error which is the difference between the desired signal and
error signal. In order for LMS filter to approach the optimum
filter weights, the algorithm starts by assuming small weights
(zero) and at each step, it finds the gradient of the mean
square error and then updates the weights. If the mean square
error is positive, error is increases positively and if same
error is used, filter weights needs to be reduced accordingly.
And vice versa, if gradient is negative, filter weights need to
be increased. Weight update equation is as below,
w(i) = w(i-1) + μ e(i) x(i) ...............(2)
where e(i), x(i), μ and w(i) are the error, the input, step size
parameter and the weight function respectively.
If the step size parameter μ is significantly small , LMS
algorithm converges in the mean square provided that u
satisfies the condition given below,
0 < u < (1 / λmax )…………. (3)
Where, λmax is the largest eigen value of the correlation
matrix.
The LMS algorithm is summarized as below:
(i) Inputs :
x = input signal
dn = desired signal
M = Filter Length
μ = Step-size factor
(ii) Outputs :
y = output of filter
e = error signal
(iii) Pseudo-code
Initialize :
Filter coefficient w(1) = 0
Loop1:
For every i, do
Pramod R Bokde et al, Int.J.Computer Technology & Applications,Vol 6 (1),51-56
IJCTA | Jan-Feb 2015 Available [email protected]
52
ISSN:2229-6093

Calculate e(i) = d(i) – w(i)T x(i)
Update w(i) = w(i) + μ e(i) x(i)
End
The graphical result of implementation of LMS algorithm
using MATLAB is shown in figure 4 below.
IV. NORMALIZED LEAST MEAN SQUARES
(NLMS) ALGORITHM
Due to sensitivity of the LMS algorithm to scaling of its
input, making it very difficult to choose the correct step size
to ensure stability of the algorithm, NLMS algorithm was
developed. This algorithm works on the basis of normalizing
the power of the input and therefore stabilizing the filter. The
modified weight update equation is shown below,
…………………….(4)
Where, є (epsilon) is very small non-zero number to avoid
division by 0 in denominator.
Figure 4 : Graphical result of implementation of LMS Algorithm
The NLMS algorithm is summarized as below,
(i) Inputs :
x = input signal
dn = desired signal
M = Filter Length
μ = Step-size factor
E = epsilon
(ii) Outputs :
y = output of filter
e = error signal
(iii) Pseudo-code
Initialize :
Filter coefficient w(1) = 0
Loop1:
For every i, do
Calculate e(i) = d(i) – w(i)T x(i)
Update w(i) = w(i) + μ e(i) x(i)/ (E +
||x(i)||2)
End
The graphical result of implementation of LMS algorithm
using MATLAB is shown in figure 5 below.
V. GAUSSIAN REPRODUCING KERNEL
HILBERT SPACE (RKHS)
A kernel k (i, j), is a continuous function which takes two
inputs I and j and maps them to a real value independent of
the order of inputs, i.e. k(I, j) = k (j, i) Є R. The Mercer’s
theorem [18] “is a representation of a symmetric positive-
definite function on a square as a sum of a convergent
sequence of product functions”. Since the noise sources are
Gaussian, Gaussian RKHS is used instead of polynomial
RKHS.
Figure 5 : Graphical result of implementation of NLMS Algorithm
Pramod R Bokde et al, Int.J.Computer Technology & Applications,Vol 6 (1),51-56
IJCTA | Jan-Feb 2015 Available [email protected]
53
ISSN:2229-6093
The algorithm for RKHS is summarized as below,
(i) Inputs :
x(i) = input signal 1
x(j) = input signal 2
α = Kernel Parameter
(ii) Outputs :
k = Gaussian Kernel
(iii) Pseudo-code
Calculate : KernelG (x(i), x(j)) = exp (-α || x(i)
– x(j)|| )
VI. KERNEL LEAST MEAN SQUARES (KLMS)
ALGORITHM
The basic LMS algorithm works properly on linear data,
where mapping between the input signal and the desired
signal is linear. For non-linear data, that mapping between
the desired signal and the input signal is non-linear; the LMS
algorithm will show poor performance. For improvement of
the performance of LMS algorithm, it must be formulated to
be capable of learning non-linear mapping. For non-linear
mapping KLMS algorithm uses RKHS to transform the input
signal x(i) into higher dimension feature space. Since input
signal is in higher dimension, it will provide richer
representation of it and therefore, its stochastic gradient
descent will be more effective for non-linear mapping of the
LMS algorithm for non-linear problems. The weight update
algorithm for KLMS algorithm is same as that of the LMS
weight update algorithm and is as below,
w(i) = w(i) + μ e(i) φ(i) ……….. (5)
where, φ(i) = φ(x(i)) is the higher dimension of input signal.
As the size of the input signal increases, size of the φ will
increase as well. This may cause problem and the need for
alternative way of computation. A kernel trick is a way of
mapping inputs into an inner product space without the
explicit need to compute the mapping. By using the kernel
trick, updated weight equation will be transformed to,
w(i)T φ(i’) = μ ∑e(j) k(x(j), x’) ………. (6)
where i’ is the inner product between transformed inputs.
We notice from the comparison of weight update algorithm
of KLMS algorithm with weight update of LMS algorithm
that KLMS algorithm is calculated weight-less. It uses sum
of all the past errors multiplied by the kernel evaluations on
the previous data.
We denote y(i) as the output of the filter at time i. we
propose the following new algorithm.
F( i – 1) = μ ∑e(j) k(x(j), x(i))…………(7)
This new algorithm which is simply the LMS in RKHS
called KLMS and filtering is done by the kernel evaluation.
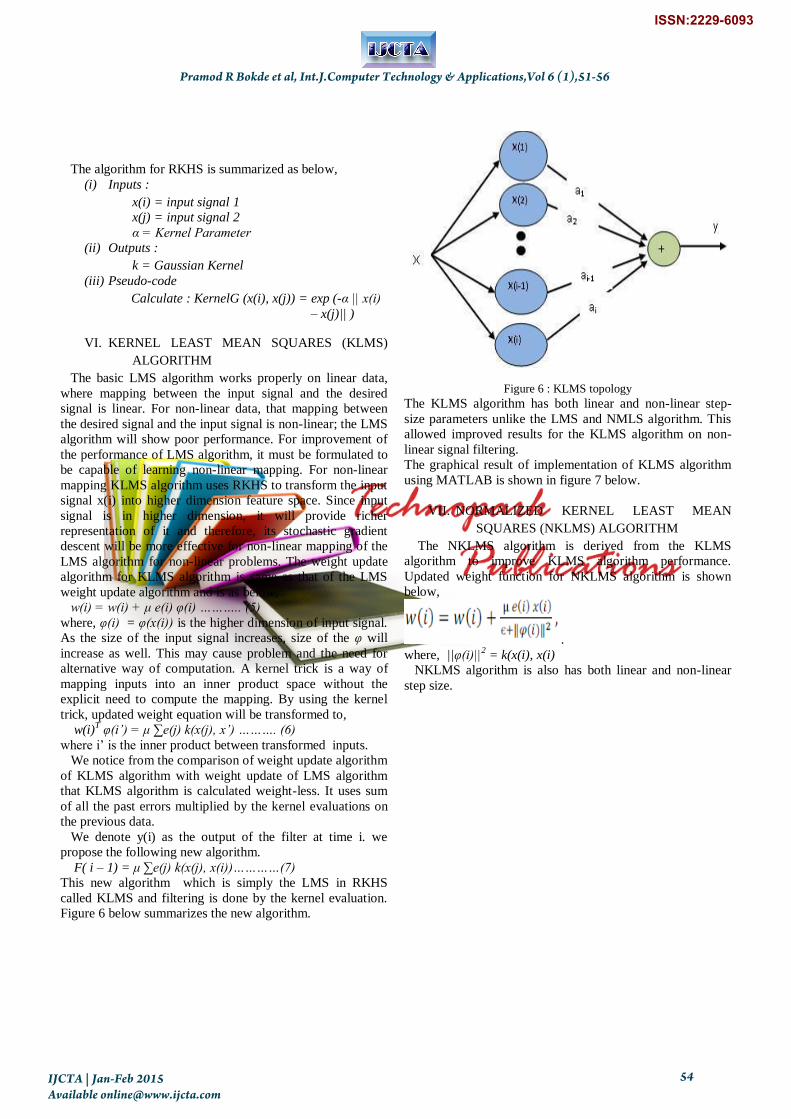
Figure 6 below summarizes the new algorithm.
Figure 6 : KLMS topology
The KLMS algorithm has both linear and non-linear step-
size parameters unlike the LMS and NMLS algorithm. This
allowed improved results for the KLMS algorithm on non-
linear signal filtering.
The graphical result of implementation of KLMS algorithm
using MATLAB is shown in figure 7 below.
VII. NORMALIZED KERNEL LEAST MEAN
SQUARES (NKLMS) ALGORITHM
The NKLMS algorithm is derived from the KLMS
algorithm to improve KLMS algorithm performance.
Updated weight function for NKLMS algorithm is shown
below,
.
where, ||φ(i)||2 = k(x(i), x(i)
NKLMS algorithm is also has both linear and non-linear
step size.
Pramod R Bokde et al, Int.J.Computer Technology & Applications,Vol 6 (1),51-56
IJCTA | Jan-Feb 2015 Available [email protected]
54
ISSN:2229-6093
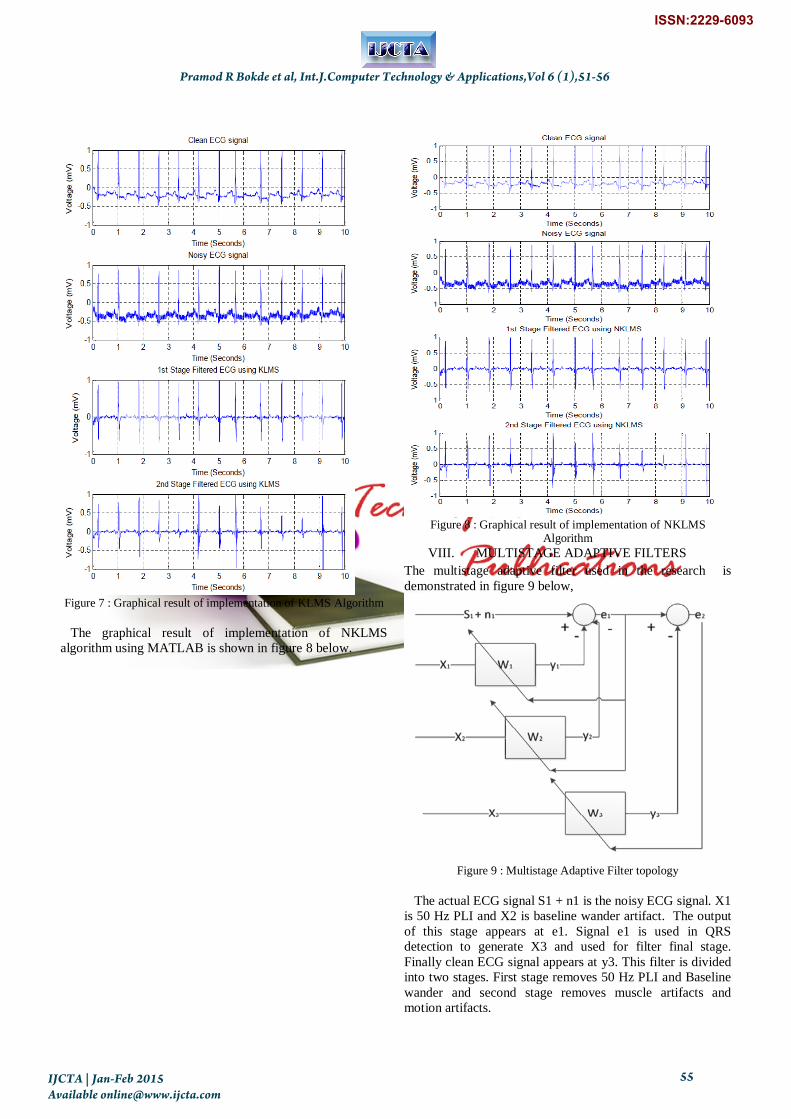
Figure 7 : Graphical result of implementation of KLMS Algorithm
The graphical result of implementation of NKLMS
algorithm using MATLAB is shown in figure 8 below.
Figure 8 : Graphical result of implementation of NKLMS
Algorithm
VIII. MULTISTAGE ADAPTIVE FILTERS
The multistage adaptive filter used in the research is
demonstrated in figure 9 below,
Figure 9 : Multistage Adaptive Filter topology
The actual ECG signal S1 + n1 is the noisy ECG signal. X1
is 50 Hz PLI and X2 is baseline wander artifact. The output
of this stage appears at e1. Signal e1 is used in QRS
detection to generate X3 and used for filter final stage.
Finally clean ECG signal appears at y3. This filter is divided
into two stages. First stage removes 50 Hz PLI and Baseline
wander and second stage removes muscle artifacts and
motion artifacts.
Pramod R Bokde et al, Int.J.Computer Technology & Applications,Vol 6 (1),51-56
IJCTA | Jan-Feb 2015 Available [email protected]
55
ISSN:2229-6093

IX. EXPERIMENTATION
First noisy ECG signals are created by adding artifacts to the
clean signals. The clean ECG signal is 1 minute duration of
the signal record from the MIT-BIH database. The artifacts
are also obtained from the MIT-BIH database. Once the
noisy ECG signals are created, they are fed into MATLAB
program. The performance of LMS, NLMS, KLMS and
NKLMS algorithm on the noisy ECG signals are tested.
For the ECG filtering, first PLI and Baseline Wander are
filtered out and then QRS analysis is applied to determine the
beginning of P-wave value for final filter stage of muscle
artifact and motion artifact removal. This process is done for
each LMS, NLMS, KLMS and NKLMS algorithm. For QRS
detection, a 3rd
party program is used which detects QRS
features using wavelet method.
The most common method of performance analysis is
signal to noise ratio (SNR). However, SNR analysis for an
ECG is meaningless as the medical technicians that work
with ECG signals are not interested in its SNR, but in its
accuracy in detecting its wave parameters.
X. CONCLUSION
Based on the results obtained, it can be seen that the
KLMS and NKLMS algorithms have better performance
than the LMS and NLMS algorithms. As for improving the
results, one can implement variable step-size algorithm
which can help faster convergence algorithm at the start.
Faster adaption allows the signal to be analyzed by smaller
segments, which will help on reducing the Gaussian RKHS.
Reduction in the Gaussian RKHS means fewer algorithm
computations.
It is to be noted that the KLMS and NKLMS algorithms
have linear and non-linear step-size parameters. For the
purpose of this work, both parameters were set to be equal.
By trial and error, it is possible to adjust non-linear
parameters to improve the performance of the KLMS and
NKLMS algorithms.
The comparison based on different parameters are as
shown in table1 below.
LMS NLMS KLMS NKLMS
Data
Modeling
Linear Linear Linear &
Non-
Linear
Linear &
Non-
Linear
Computation Fast Fast Moderate Moderate
Simplicity Simple Simple Moderate Moderate
REFERENCES [1] S. Haykin, Adaptive Filter Theory, Prentice Hall, 2002.
[2] W. Liu, J. Principe and S. Haykin, Kernel Adaptive Filtering: A
Comprehensive Introduction, Wiley, 2010. [3] http://en.wikipedia.org/wiki/Electrocardiography.
[4] http://en.wikipedia.org/wiki/Adaptive_filter.
[5] http://en.wikipedia.org/wiki/Kernel_adaptive_filter.
[6] http://www.cnel.ufl.edu/~weifeng/publication.htm. [7] http://technical.grasshoppernetwork.com/?q=node/156.
[8] N. V. Thakor, J. G. Webster and W. J. Tompkins, "Applications of adaptive filtering to ECG analysis: noise cancellation and
arrhythmia detection," Biomedical Engineering, IEEE Transaction,
vol. 38, no. 8, pp. 785-794, Aug. 1991.
[9] E. R. Ferrara and B. Widrow, "Fetal electrocardiogram enhancement by timesequenced adaptive filtering," Biomedical
Engineering, IEEE Transactions on, Vols. BME-29, no. 6, pp. 458-
460, June 1982.
[10] B. Widrow, J. Glover and J. McCool, "Adaptive noise canceling: principles and applications," Proceedings of the IEEE,
vol. 63, no. 12, pp. 1692-1716, 1975.
[11] M. Yelderman, B. Widrow, J. Ciotfi, E. Hesler and J. Leddy,
"ECG enhancement by adaptive cancellation of electrosurgical interference," lEEE Trans. Biomcd. Eng,Vols. BME-30, no. 7, pp.
392-398, July 1983.
[12] http://www.physionet.org/physiobank/database/mitdb/100.dat.
[13] http://www.physionet.org/physiobank/database/nstdb. [14] http://en.wikipedia.org/wiki/Mercer%27s_theorem.
[15 J . A. Van Alste and T. S. Schilder. “Removal of baseline
wander and power-line interference from the ECG by an efficient
FIR filter with a reduced number of taps,“IEEE Tram. Biomed. Eng.. vol. BME-32. pp. 1052-1062, 1985.
[16] Mercer, J. (1909), "Functions of positive and negative type and
their connection with the theory of integral equations",
Philosophical Transactions of the Royal Society A 209 (441–458): 415–446.
Pramod R Bokde et al, Int.J.Computer Technology & Applications,Vol 6 (1),51-56
IJCTA | Jan-Feb 2015 Available [email protected]
56
ISSN:2229-6093