Embed Size (px)
Citation preview

IROS 2003, Las Vegas:
Open Forum
Open ProblemsKen Goldberg
IEEE Transactions on Automation Science and Engineering

Time Activity
1:00-2:00 Introductions Motivation and History behind T-ASE, Status Quo, Q&A
2:00-3:00 Automation Science and Engineering Research Snapshots New Problems/Technologies/Application Areas
3:00-4:00 Breakout Sessions: Open Research Problems / Ideas for T-ASE Special Issues
4:00-5:00 Reports from Breakout Sessions Open Discussion, Future Plans
5:00 Adjourn

Automation Science and Engineering:
the abstractions, algorithms, theory, methodologies, models, systems, and case studies that can be applied across industries to significantly advance efficiency, quality, productivity, and reliability for society.

New Applications Areas*:
• Biotechnology and Health• Food Handling and Processing• Service Industries• Transportation, Security, and Maintenance
* In addition to traditional broad ranging manufacturing areas.

Scope ofT-ASE The IEEE Transactions on Automation Science and Engineering (T-ASE) publishes fundamental papers on Automation, emphasizing scientific results that advance efficiency, quality, productivity, and reliability. T-ASE encourages interdisciplinary approaches from computer science, control systems, electrical engineering, mathematics, mechanical engineering, operations research, and other fields. We welcome results relevant to industries such as agriculture, biotechnology, healthcare, home automation, maintenance, manufacturing, pharmaceuticals, retail, security, service, supply chains, and transportation. T-ASE addresses a research community willing to integrate knowledge across disciplines and industries. For this purpose, each paper shall include a Note to Practitioners that summarizes how its results can be applied or how they might be extended to apply in practice.

www.ieee.org/t-ase/


n users 1 pan, tilt, zoom robotic camera
Open problem: shared camera control

Example input: 7 requested frames:

One Optimal Frame
Co-opticon Problem: Given n requests, find optimal frame

Open Problems
• Continuous zoom (m=)• Multiple outputs:
– p cameras – p views from one camera
• Obstacle Avoidance• Satellite viewpoint scheduling

• Bulky• Complex• Multilateral• Dedicated, • Expensive• Long Lead time• Designed by
human intuition
Conventional Fixtures

• N-2-1 approachCai et al, 1996.
• Decoupling beam elementsShiu et al, 1997.
• Manipulation of sheet metal partKavraki et al, 1998.
Deformable parts

Examples

Open Problems• Efficient coverage: machining, lawn
mowing, vacuuming, painting• Layered Mfg: optimal casting
direction• Optimal Cloth Cutting• CAD modeling: robust CSG operations• Tolerance Modeling• Gripper Design• Feeder Design

Open Problems
• Voting Machine Design• Baggage Handling• Automated Toll Booths: eg,
Fastrack• RFID tag placement• Machine Vision/Inspection


Open problem:Radiotherapy Dosimetry
Planning

Prostate Cancer
• 2nd deadliest cancer for men• 220,900 new cases will be
diagnosed, 28,900 men will die this year in the US MR image of prostate
3.5cm diameter

Permanent Seed Prostate Brachytherapy
• Radiotherapy for treating prostate cancer
• Radioactive seeds implanted in prostate
• Seed implantation plan developed using static pre-operation image

Seed Implantation Challenges
Seeds implanted using a minimally invasive procedure
Accurate seed placement better patient treatment
(Ultrasound, Sagittal plane)

Challenges for Accurate Seed Placement
Needle insertion causes soft tissue todisplace & deform
Real-time imaging is often not available or poor quality

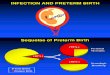
12 Random Target Points
1
2
3
1234
z (cm)y(
cm)
1
2
3
1234
z (cm)
y(cm
)
Placements without planning
Placement errors average 20% of prostate diameter
Placements using planner
Seed placement error was negligible