Embed Size (px)
Citation preview
Concurrent systems with negative events
Ioana D. Cristecu, Jean Krivine and Daniele VaraccaPPS - Univ. Paris Diderot
Supported by ANR REVER INS
Friday, December 20, 13
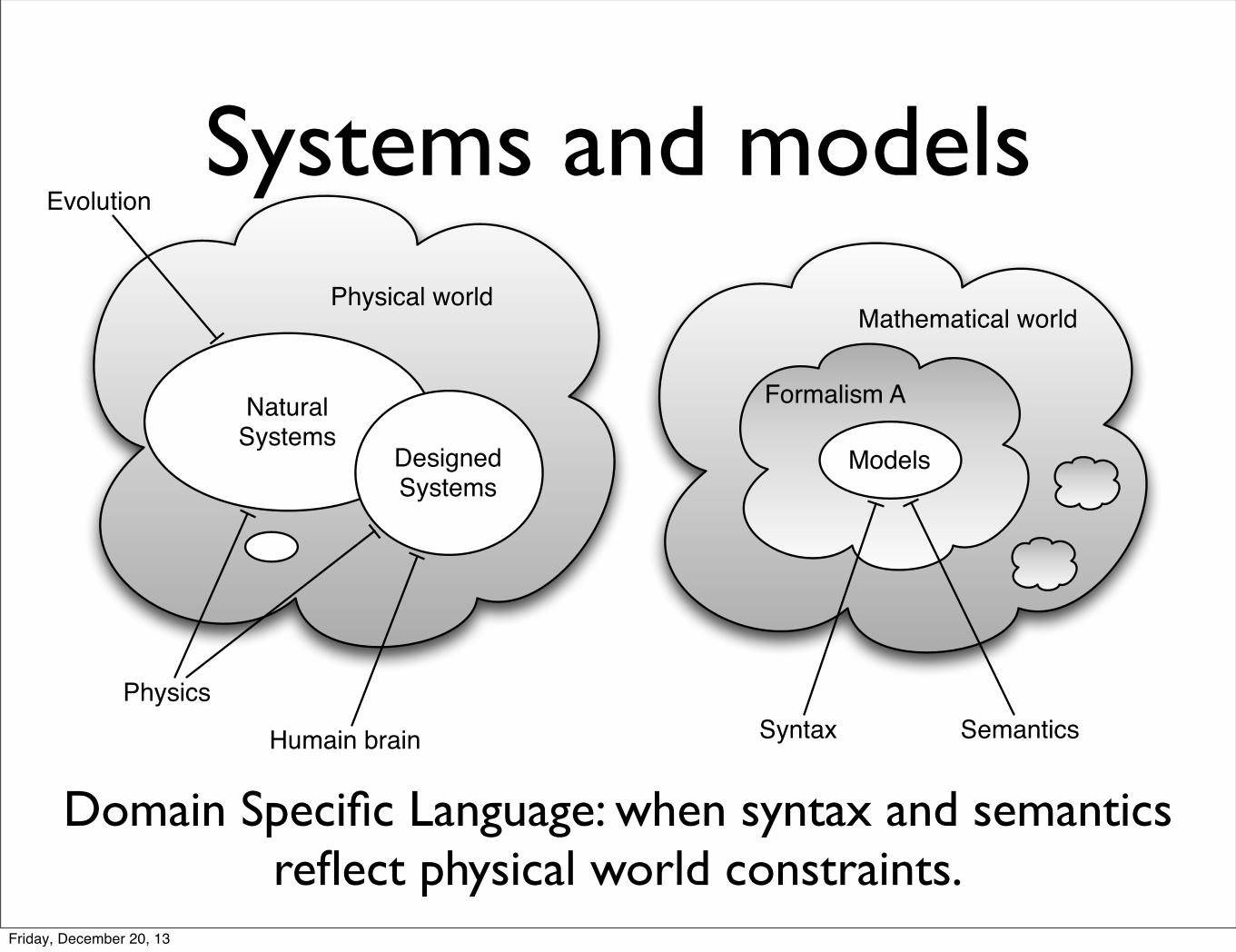
Systems and models
NaturalSystems
DesignedSystems
Physical world Mathematical world
Evolution
Physics
Humain brain Syntax Semantics
Models
Formalism A
Domain Specific Language: when syntax and semantics reflect physical world constraints.
Friday, December 20, 13
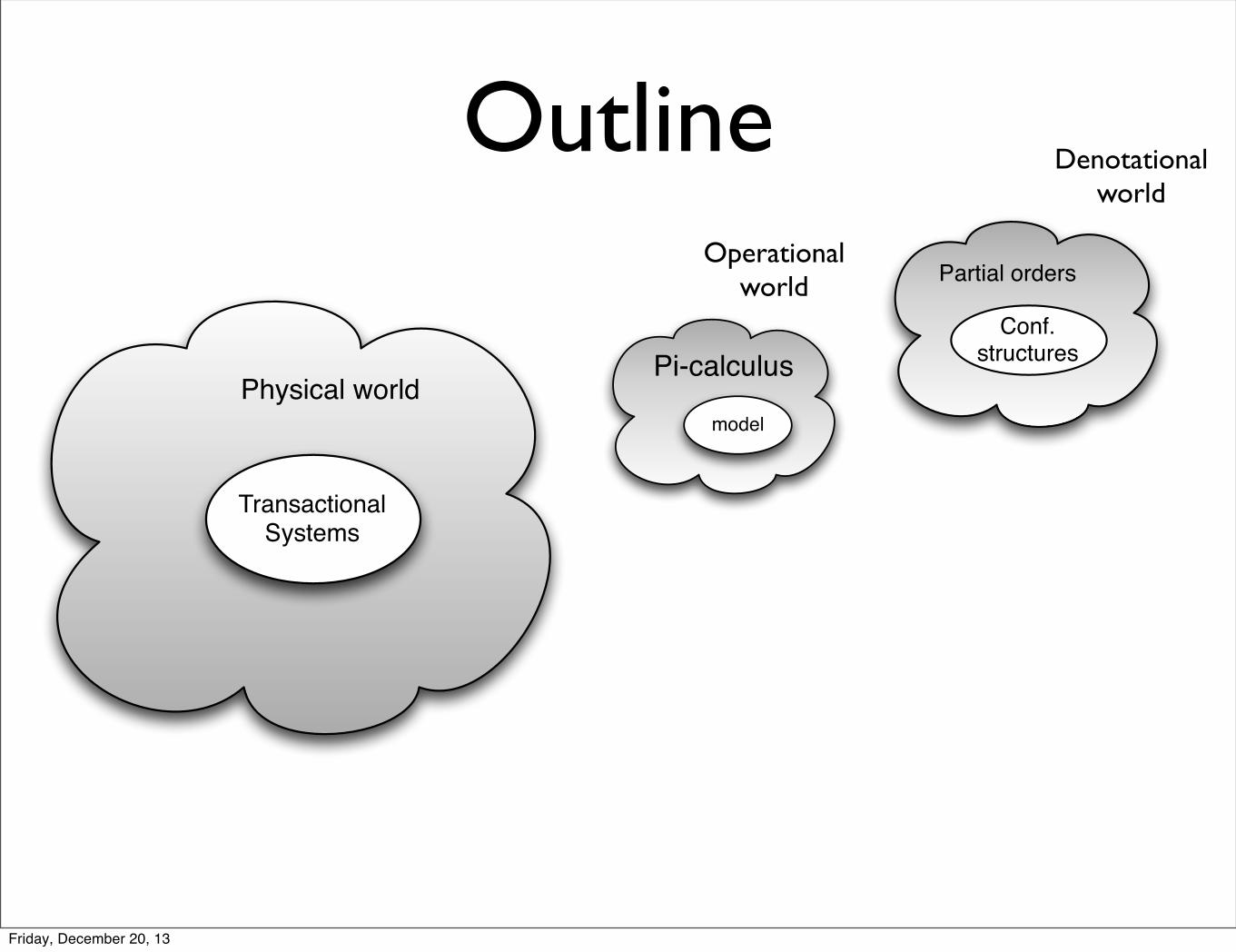
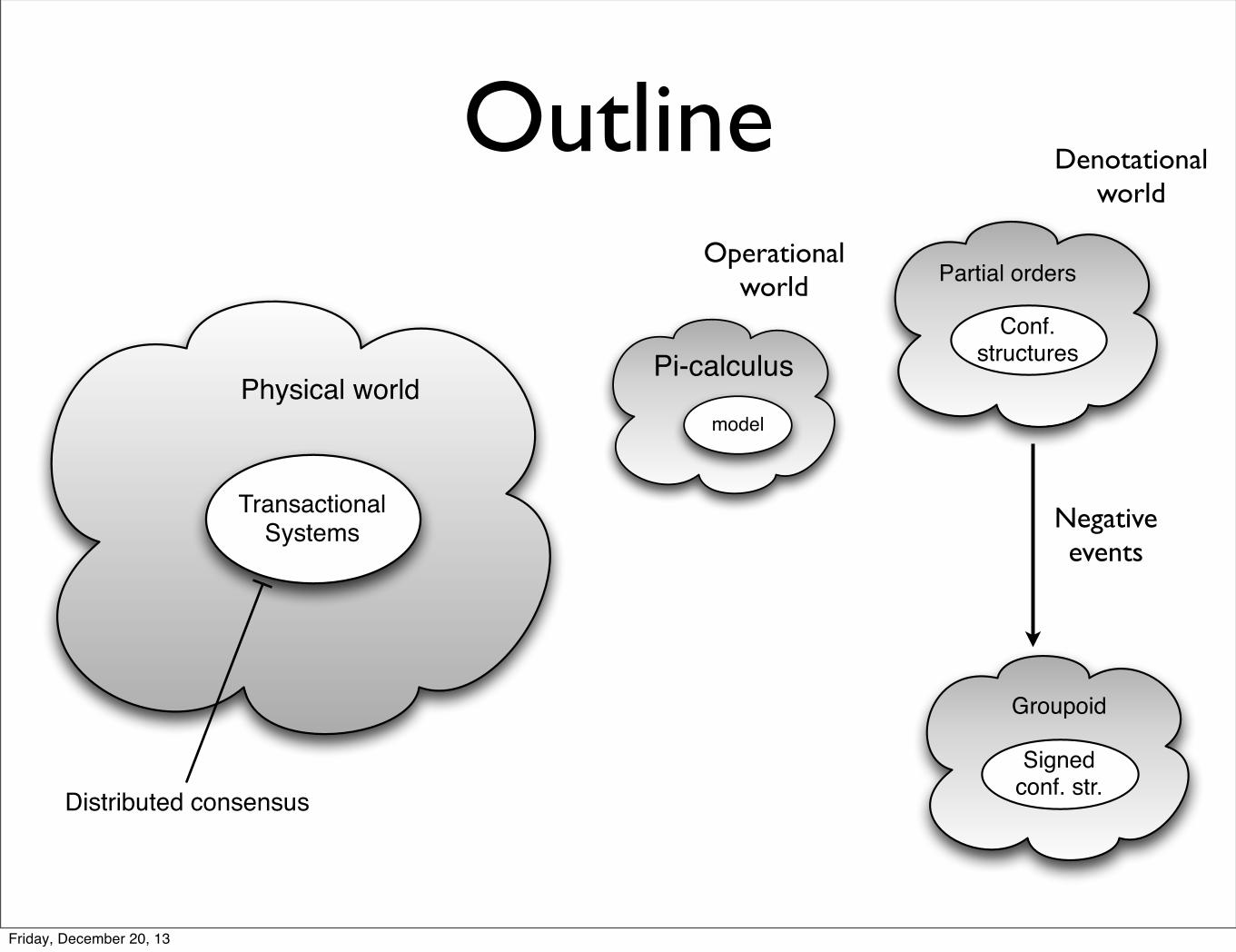
Outline
TransactionalSystems
Physical worldPi-calculus
model
Partial orders
Conf. structures
Denotationalworld
Operationalworld
Friday, December 20, 13
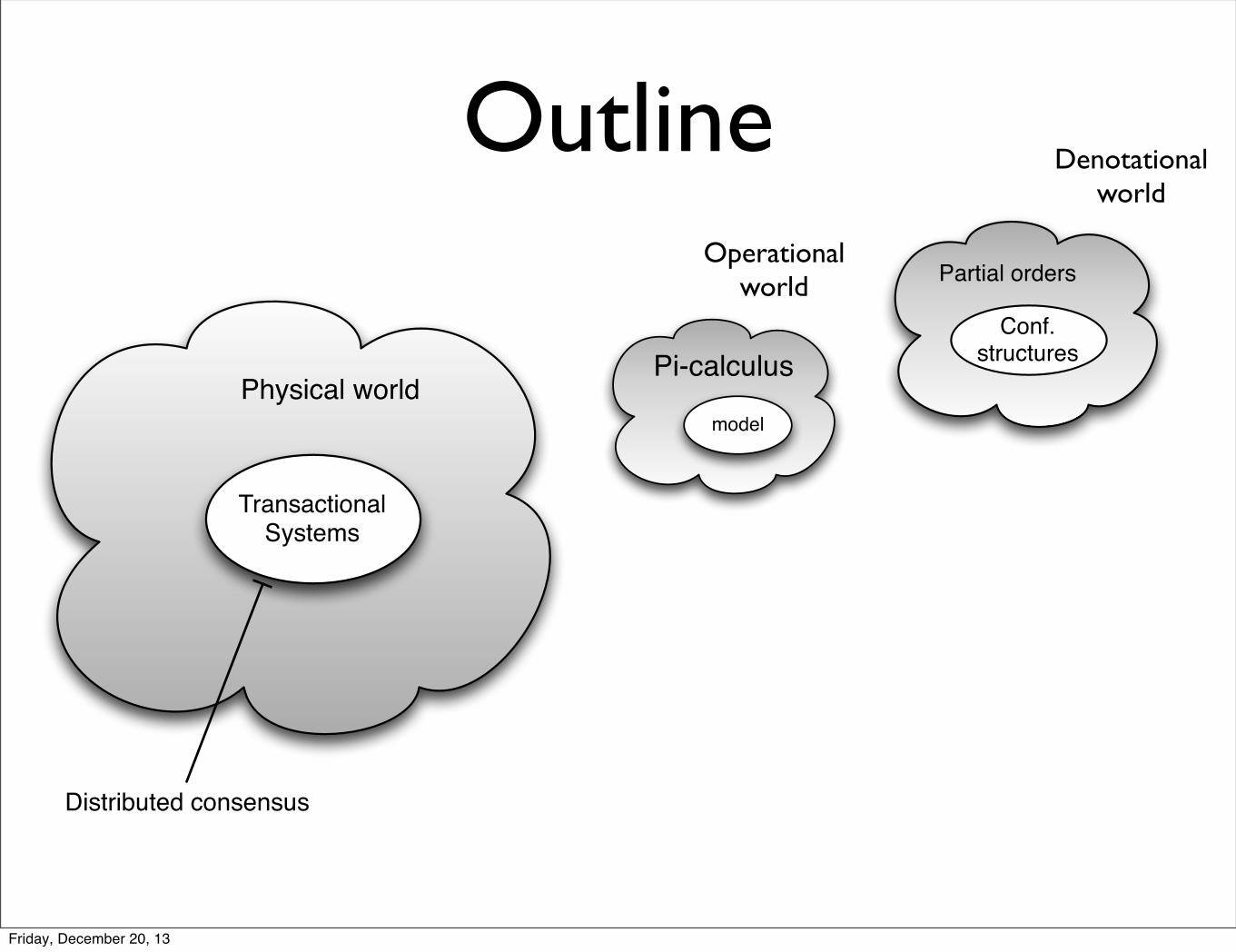
Outline
TransactionalSystems
Physical world
Distributed consensus
Pi-calculus
model
Partial orders
Conf. structures
Denotationalworld
Operationalworld
Friday, December 20, 13
Outline
TransactionalSystems
Physical world
Distributed consensus
Pi-calculus
model
Partial orders
Conf. structures
Groupoid
Signed conf. str.
Negativeevents
Denotationalworld
Operationalworld
Friday, December 20, 13
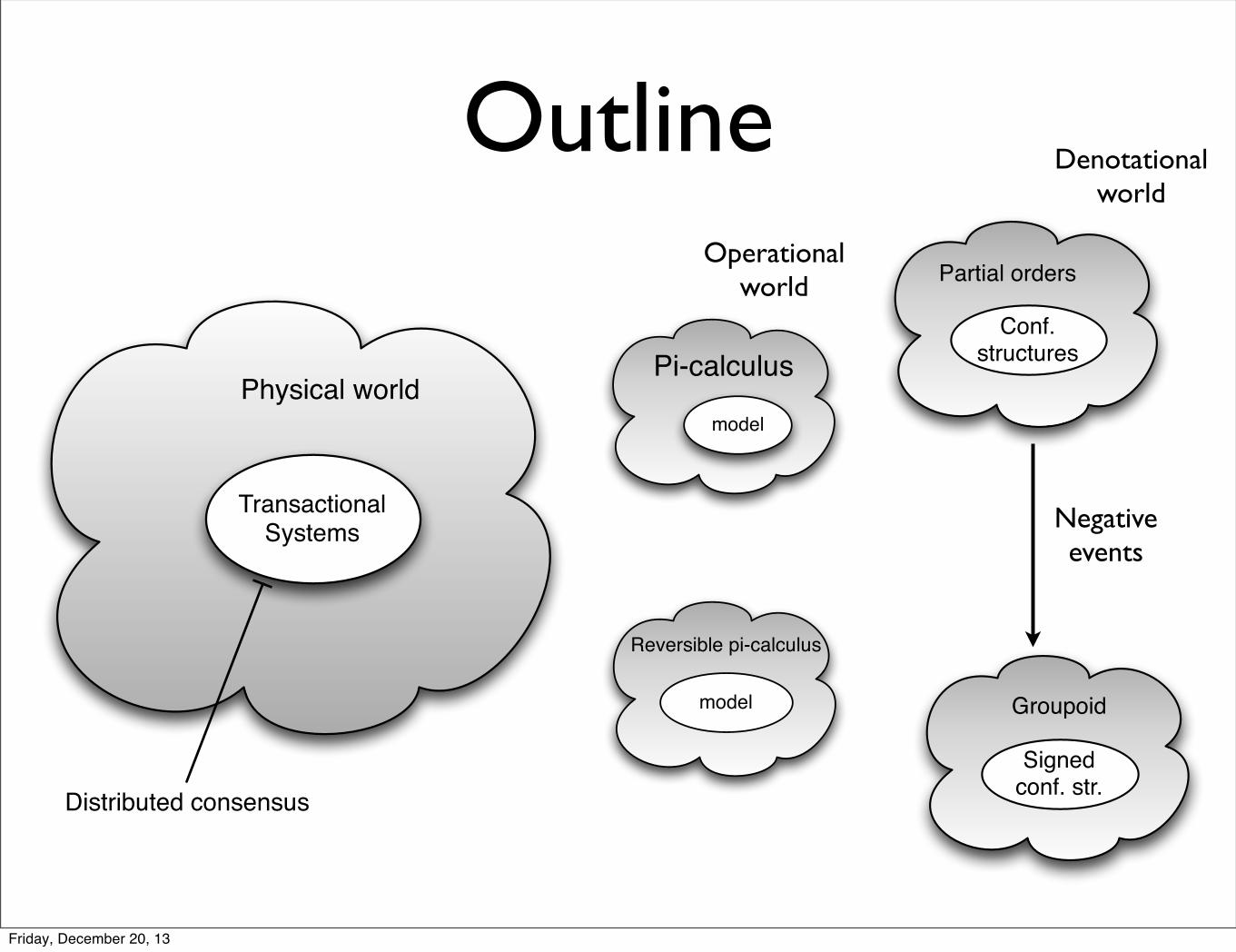
Outline
TransactionalSystems
Physical world
Distributed consensus
Pi-calculus
model
Partial orders
Conf. structures
Reversible pi-calculus
model Groupoid
Signed conf. str.
Negativeevents
Denotationalworld
Operationalworld
Friday, December 20, 13
Natural consensus
Friday, December 20, 13
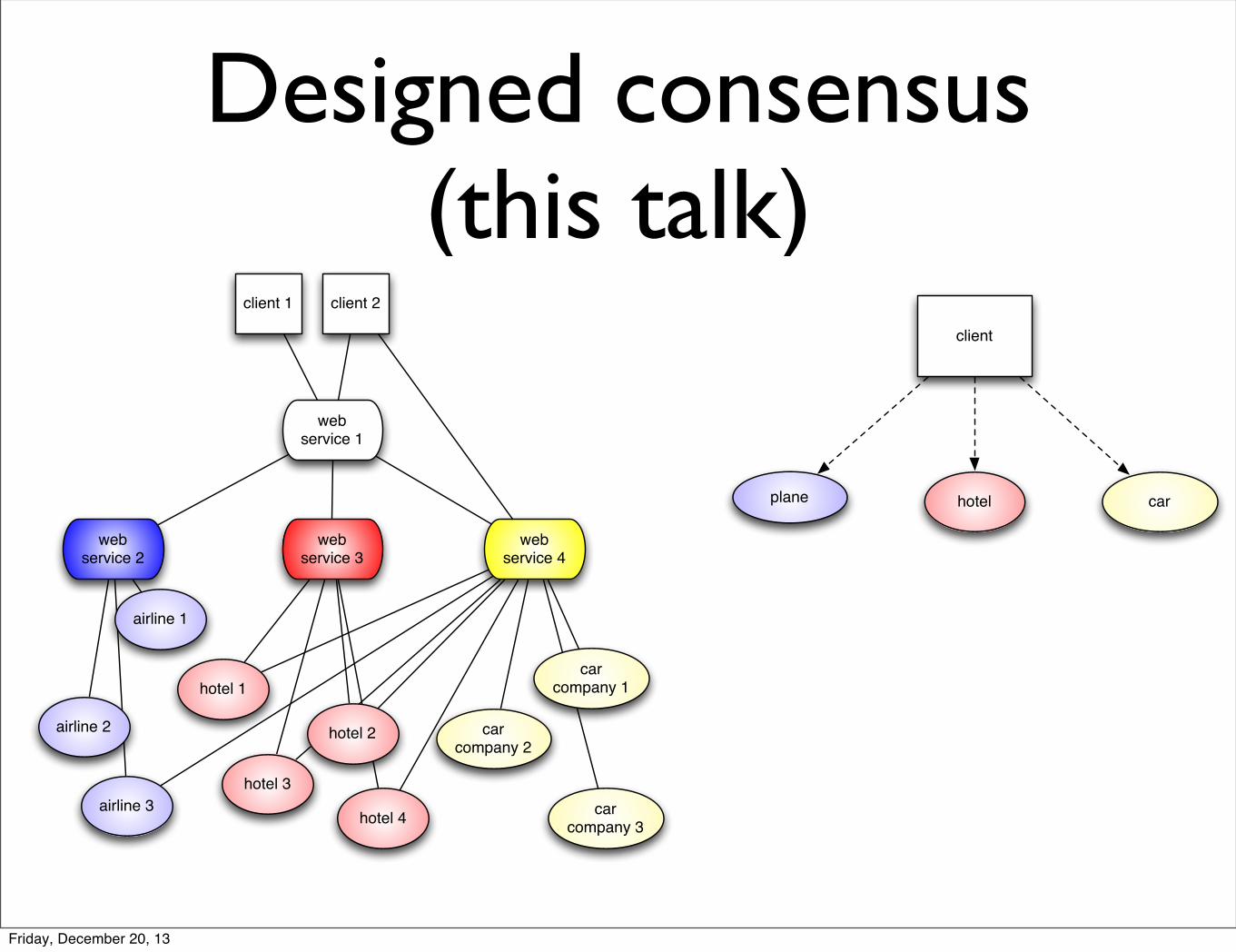
Designed consensus (this talk)
Distributed transaction
plane hotel car
client
webservice 1
webservice 2
web service 3
web service 4
airline 3
hotel 1
car company 2
car company 3
client 1 client 2
hotel 2
hotel 3
hotel 4
car company 1
airline 2
airline 1
Fig. 1. A transaction is performed in a possibly complicated network (left), whereseveral resources may be accessed concurrently by nodes (web services) in charge of asub-transaction. The spec (right) requires exactly one plane, one hotel and one car tobe secured for the client. The web-services that are contacted is not part of this spec.
In the end, the transaction is a success when every node has acquired and securedthe resources it was looking for. In the example of Fig. 1, the transaction is asuccess when the client node has secured exactly 3 resources. Note that whetherthe client has an immediate access to the resources, or whether it secured themvia a web service is irrelevant. We proceed now with a model that abstracts thenotion of nested distributed transactions.
Definition 4 (Transaction state). A (micro) transaction state is representeda tuple s =def ⌥X,F,B,R,A, �, w,�,⇥� where:
– X = F ⌃B⌃R⌃A = {x : tx, y : ty, z : tz, . . . } is a set of (typed) agents withtx, ty, tz, · · · ⇧ T are types.
– F ⇤ X is the set of free agents– B ⇤ X is the set of busy agents– R ⇤ X is the set of ready agents– A ⇤ X is the set of aborting agents– � : X ⇥ T ⌅ N is the cost function that tells how much typed resources an
agent needs to acquire– � ⇤ B ⇥ B is a set of (directed) pairs specifying how agents have booked
each others.– ⇥ ⇤ X⇥X is a set of (directed) pairs specifying the network topology. Note
that this map is not necessarily symmetric.
The satisfaction of agent x for resource t is defined as
sat(x, t) =def �(x, t)� | {y : t | x � y} | (2)
Friday, December 20, 13
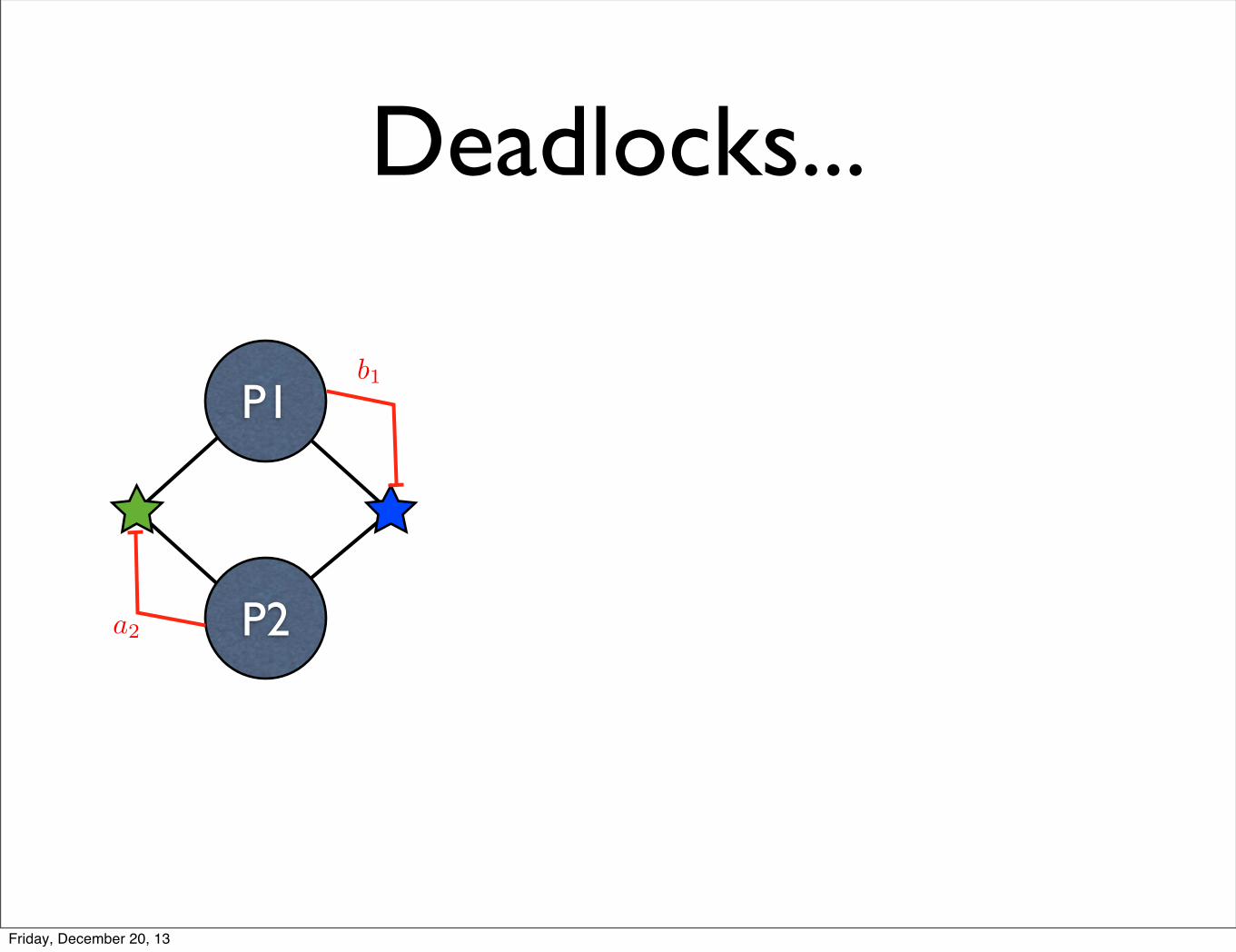
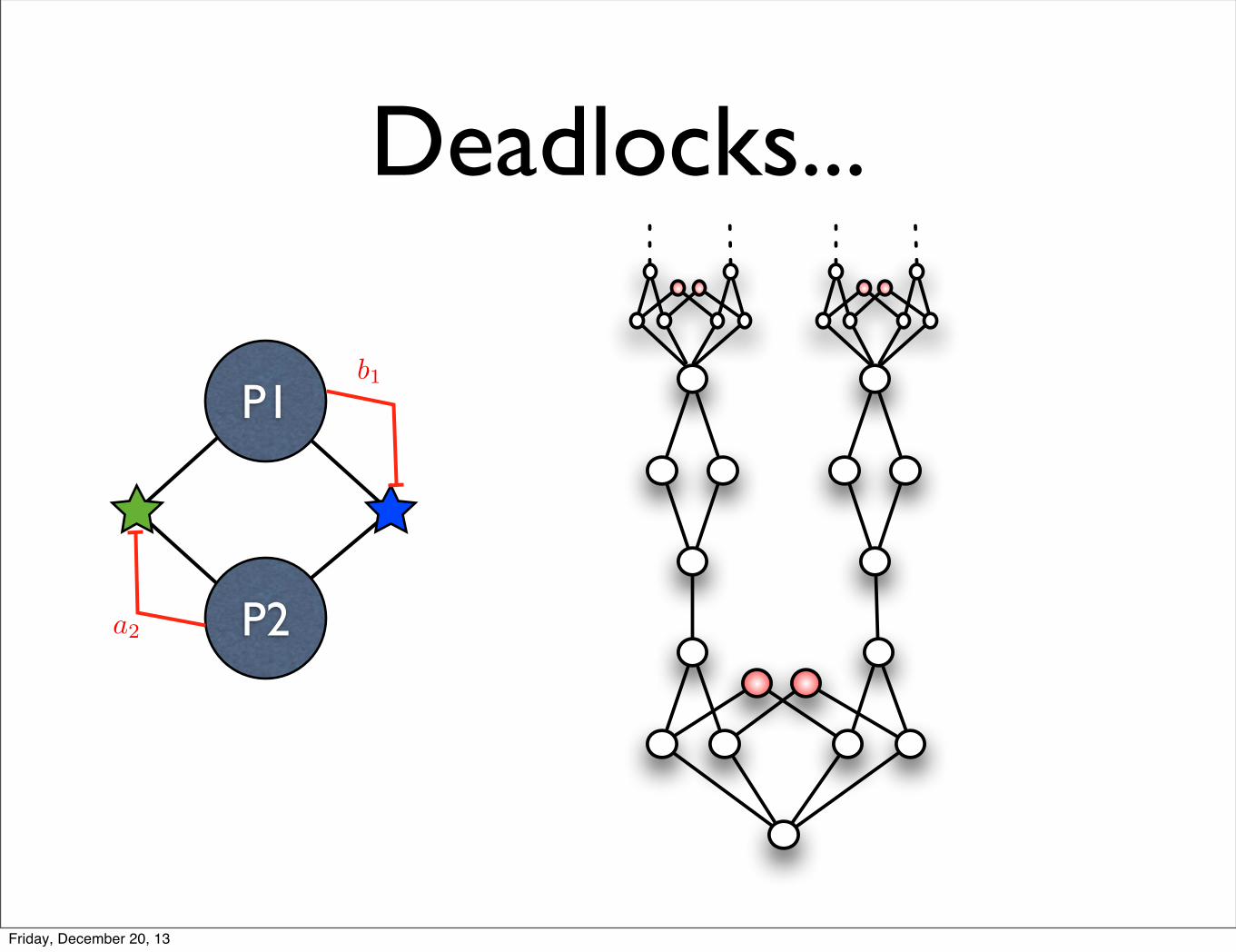
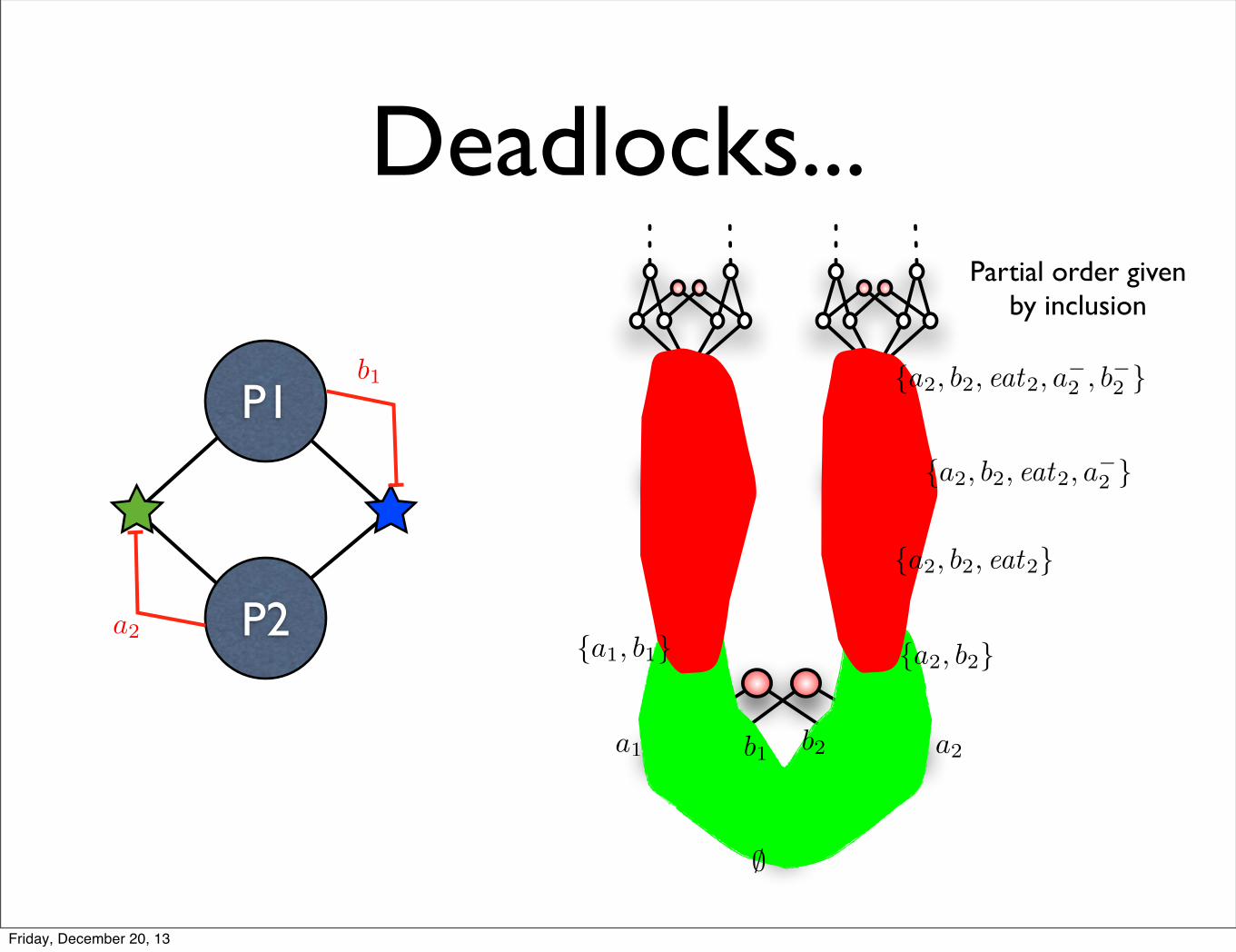
Deadlocks...
P1
P2
Friday, December 20, 13
Deadlocks...
P1
P2
a1
Friday, December 20, 13
Deadlocks...
P1
P2
a1 b1
Friday, December 20, 13
Deadlocks...
P1
P2
eat
a1 b1
Friday, December 20, 13
Deadlocks...
P1
P2
a1 b1
Friday, December 20, 13
Deadlocks...
P1
P2
b1
Friday, December 20, 13
Deadlocks...
P1
P2
Friday, December 20, 13
Deadlocks...
P1
P2a2
Friday, December 20, 13
Deadlocks...
P1
P2a2
b1
Friday, December 20, 13
Deadlocks...
P1
P2a2
b1
Friday, December 20, 13
Deadlocks...
P1
P2a2
b1
a1 a2b1 b2
;
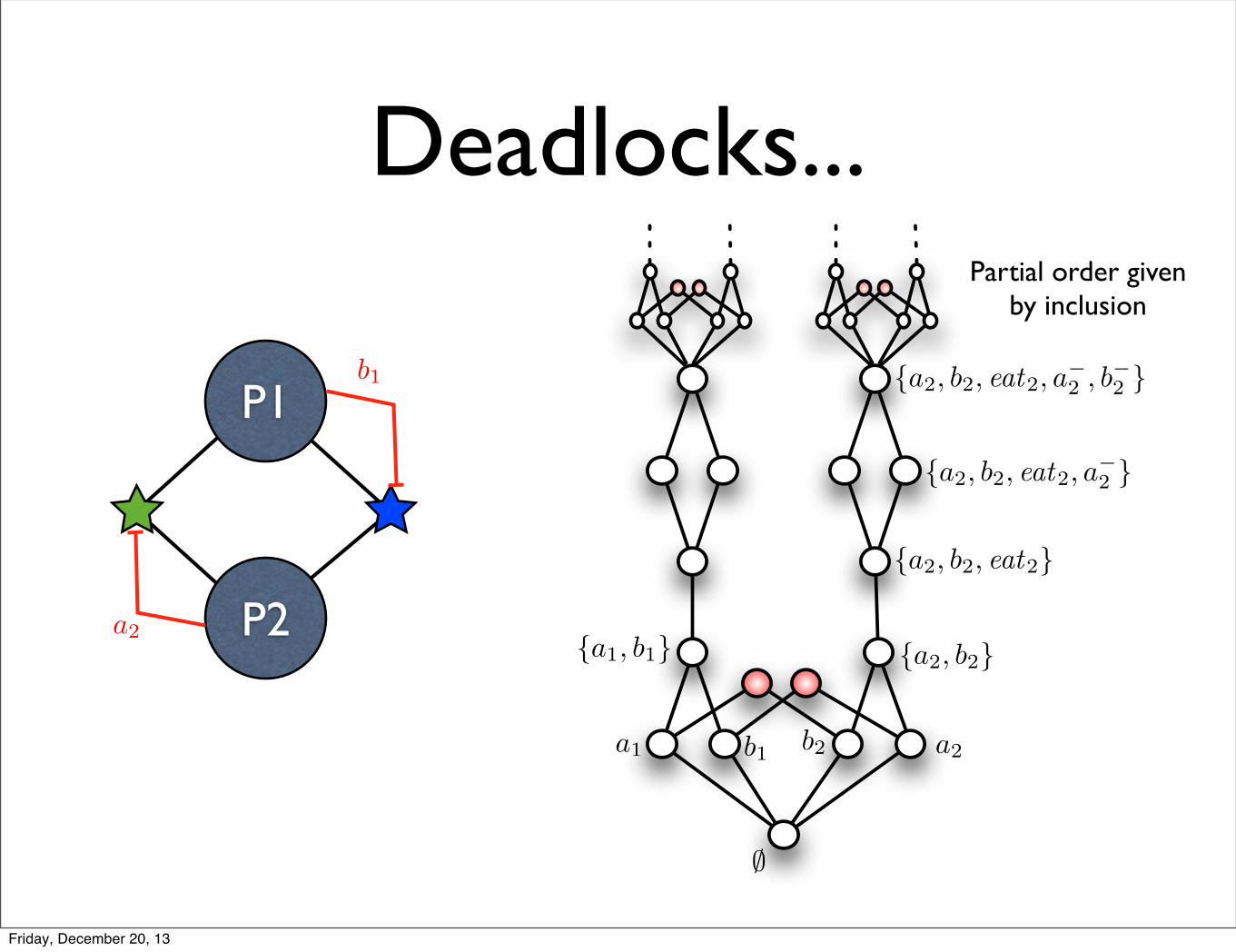
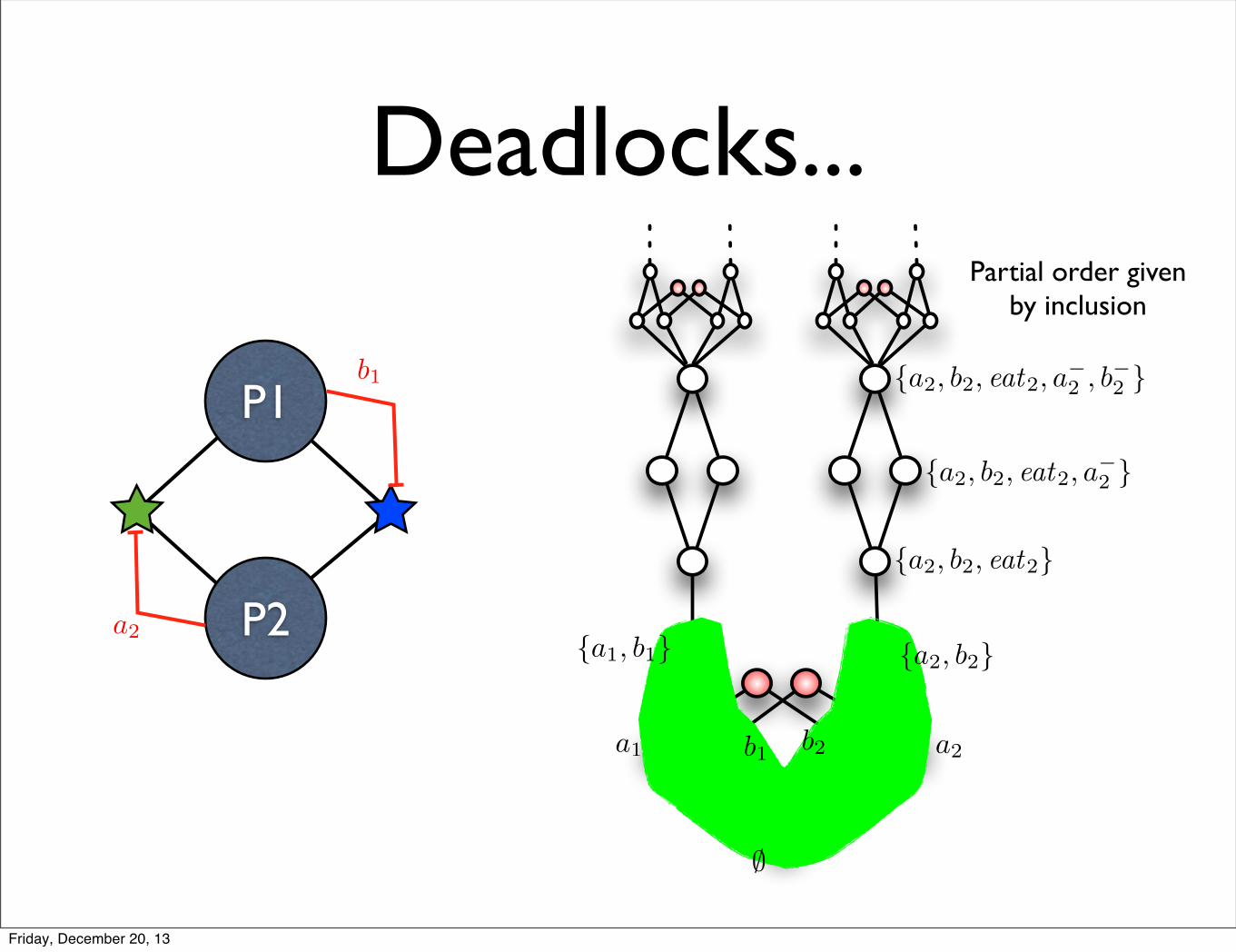
{a1, b1} {a2, b2}
{a2, b2, eat2}
{a2, b2, eat2, a�2 }
{a2, b2, eat2, a�2 , b�2 }
Partial order given by inclusion
Friday, December 20, 13
Deadlocks...
P1
P2a2
b1
a1 a2b1 b2
;
{a1, b1} {a2, b2}
{a2, b2, eat2}
{a2, b2, eat2, a�2 }
{a2, b2, eat2, a�2 , b�2 }
Partial order given by inclusion
Friday, December 20, 13
Deadlocks...
P1
P2a2
b1
a1 a2b1 b2
;
{a1, b1} {a2, b2}
{a2, b2, eat2}
{a2, b2, eat2, a�2 }
{a2, b2, eat2, a�2 , b�2 }
Partial order given by inclusion
Friday, December 20, 13
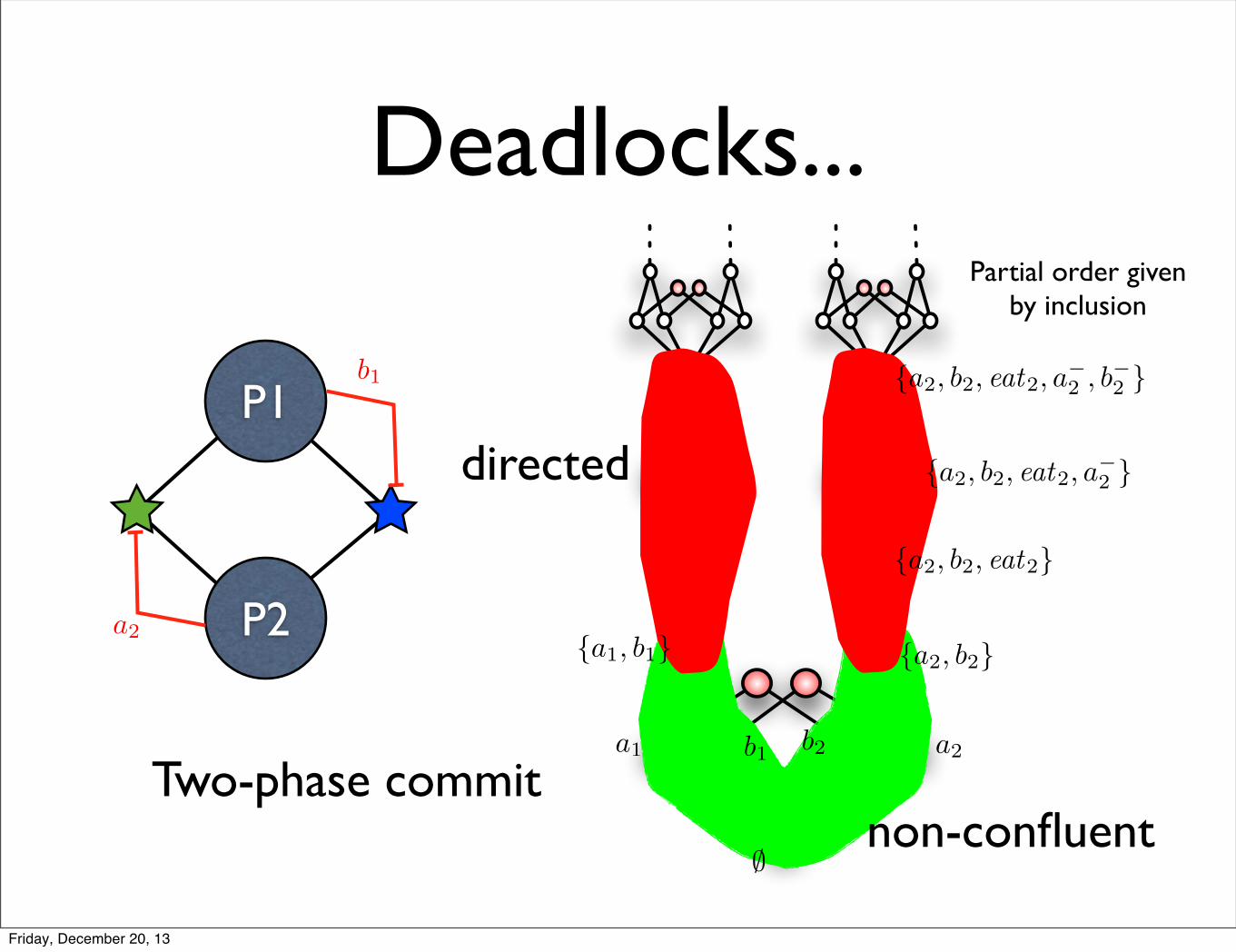
Deadlocks...
P1
P2
directed
non-confluent
a2
b1
a1 a2b1 b2
;
{a1, b1} {a2, b2}
{a2, b2, eat2}
{a2, b2, eat2, a�2 }
{a2, b2, eat2, a�2 , b�2 }
Partial order given by inclusion
Two-phase commit
Friday, December 20, 13
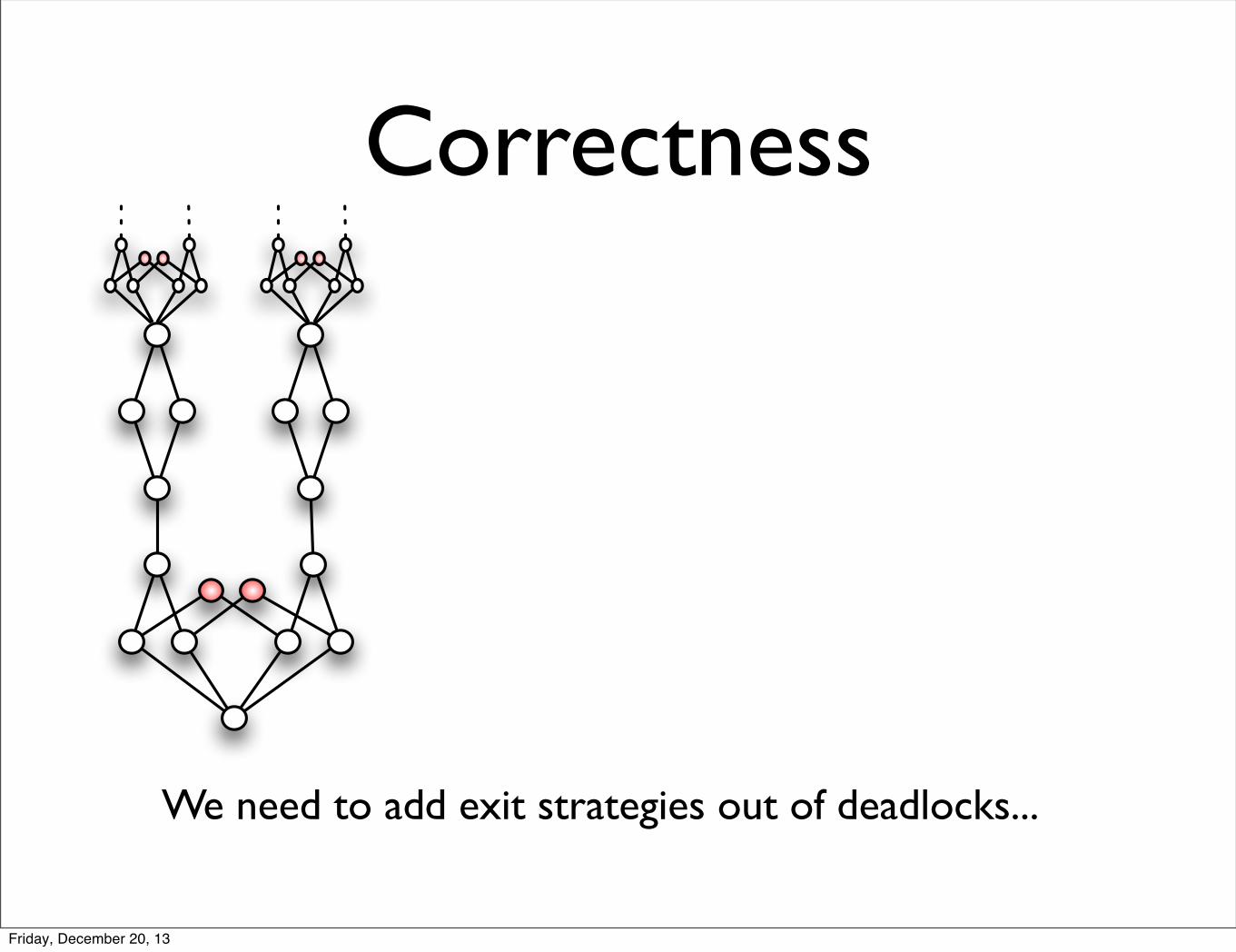
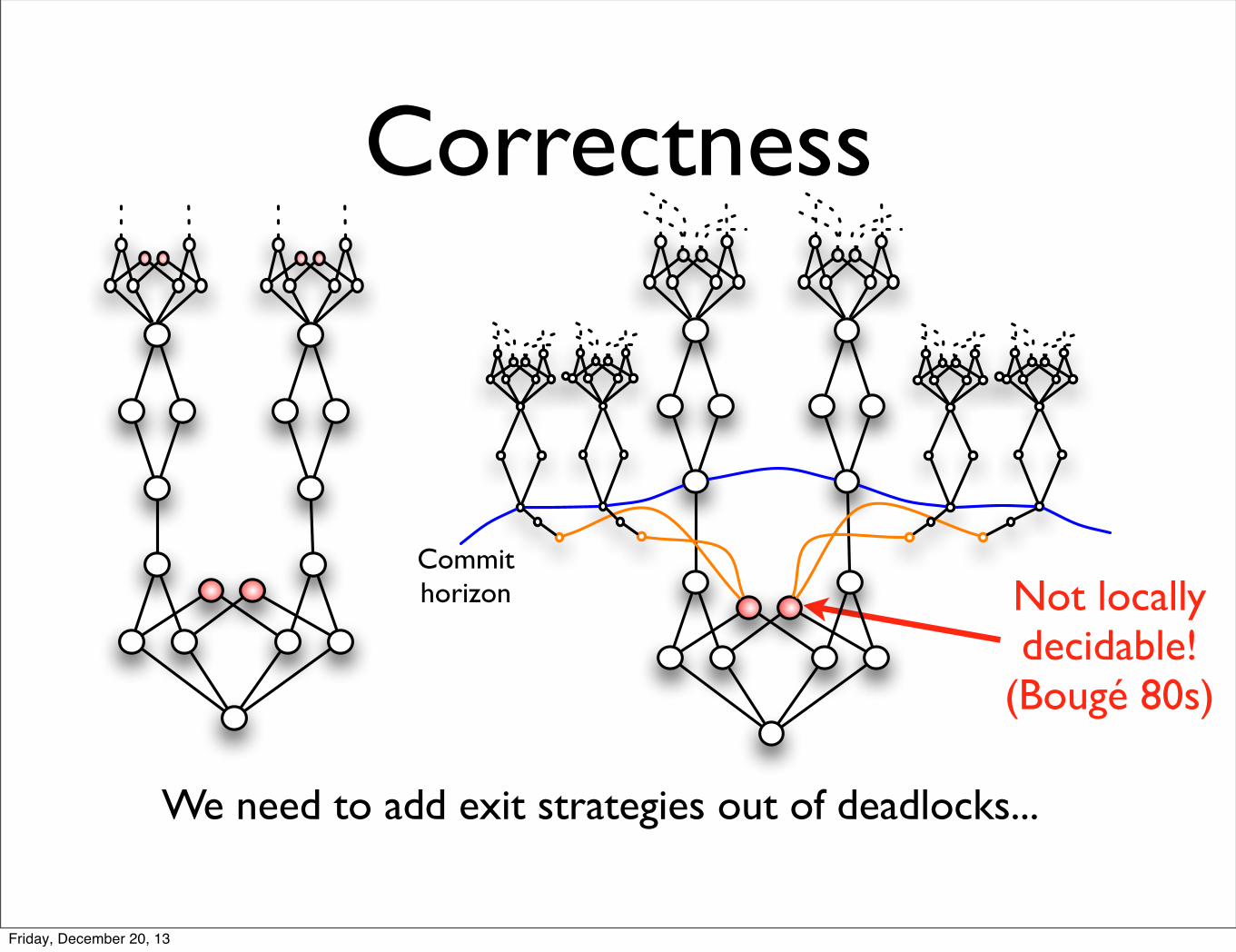
Correctness
We need to add exit strategies out of deadlocks...
Friday, December 20, 13
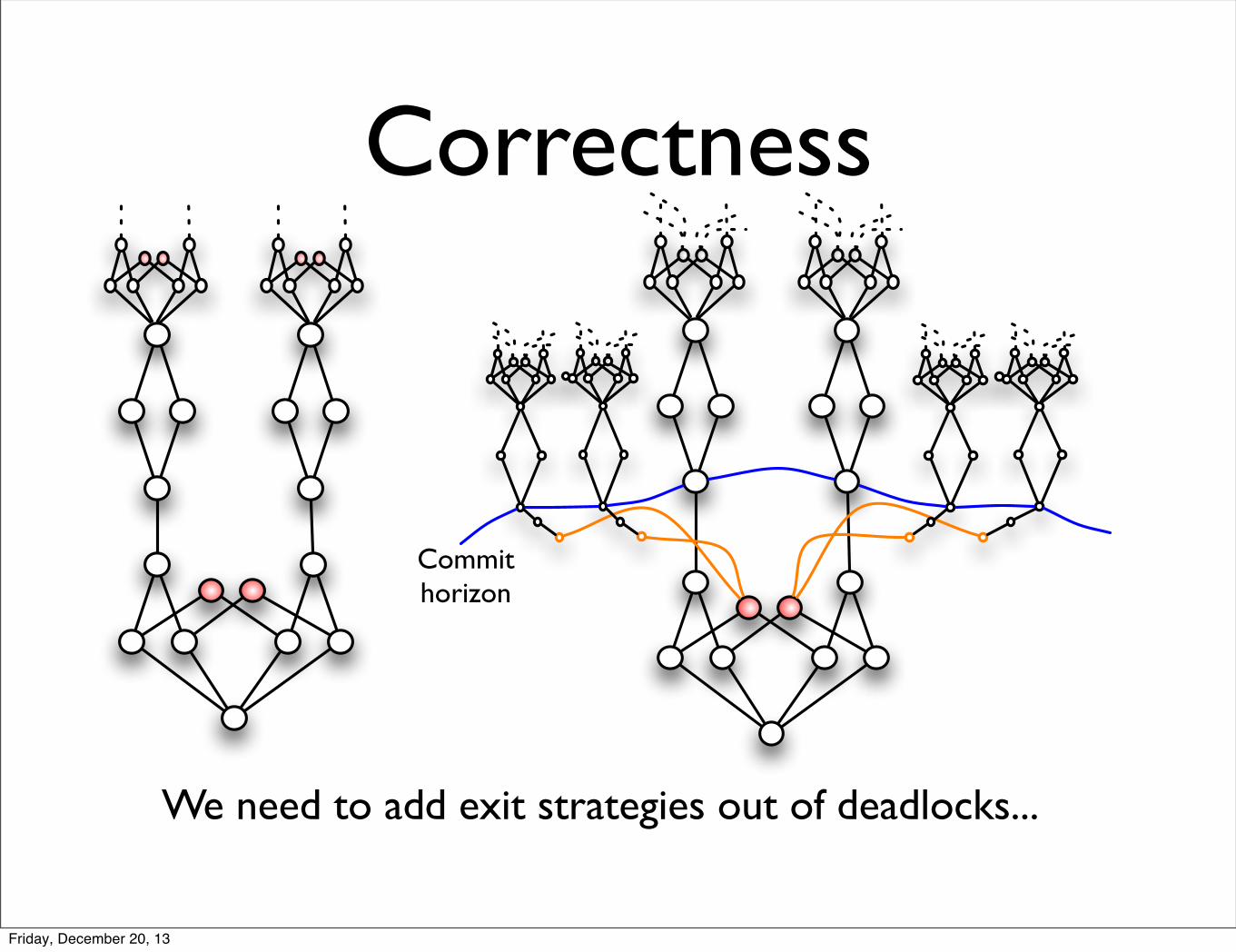
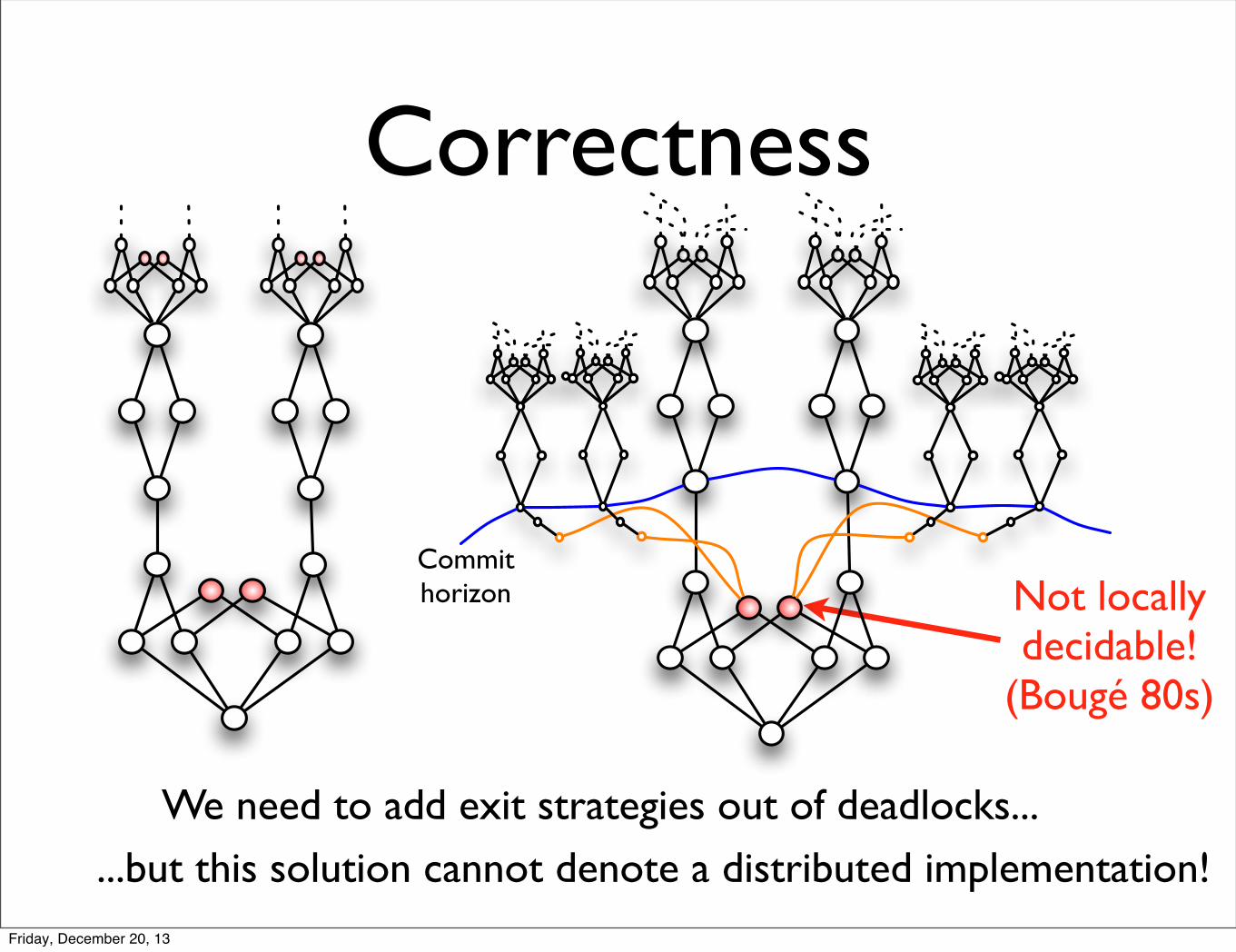
Correctness
We need to add exit strategies out of deadlocks...
Commithorizon
Friday, December 20, 13
Correctness
Not locallydecidable!
(Bougé 80s)
We need to add exit strategies out of deadlocks...
Commithorizon
Friday, December 20, 13
Correctness
Not locallydecidable!
(Bougé 80s)
We need to add exit strategies out of deadlocks......but this solution cannot denote a distributed implementation!
Commithorizon
Friday, December 20, 13
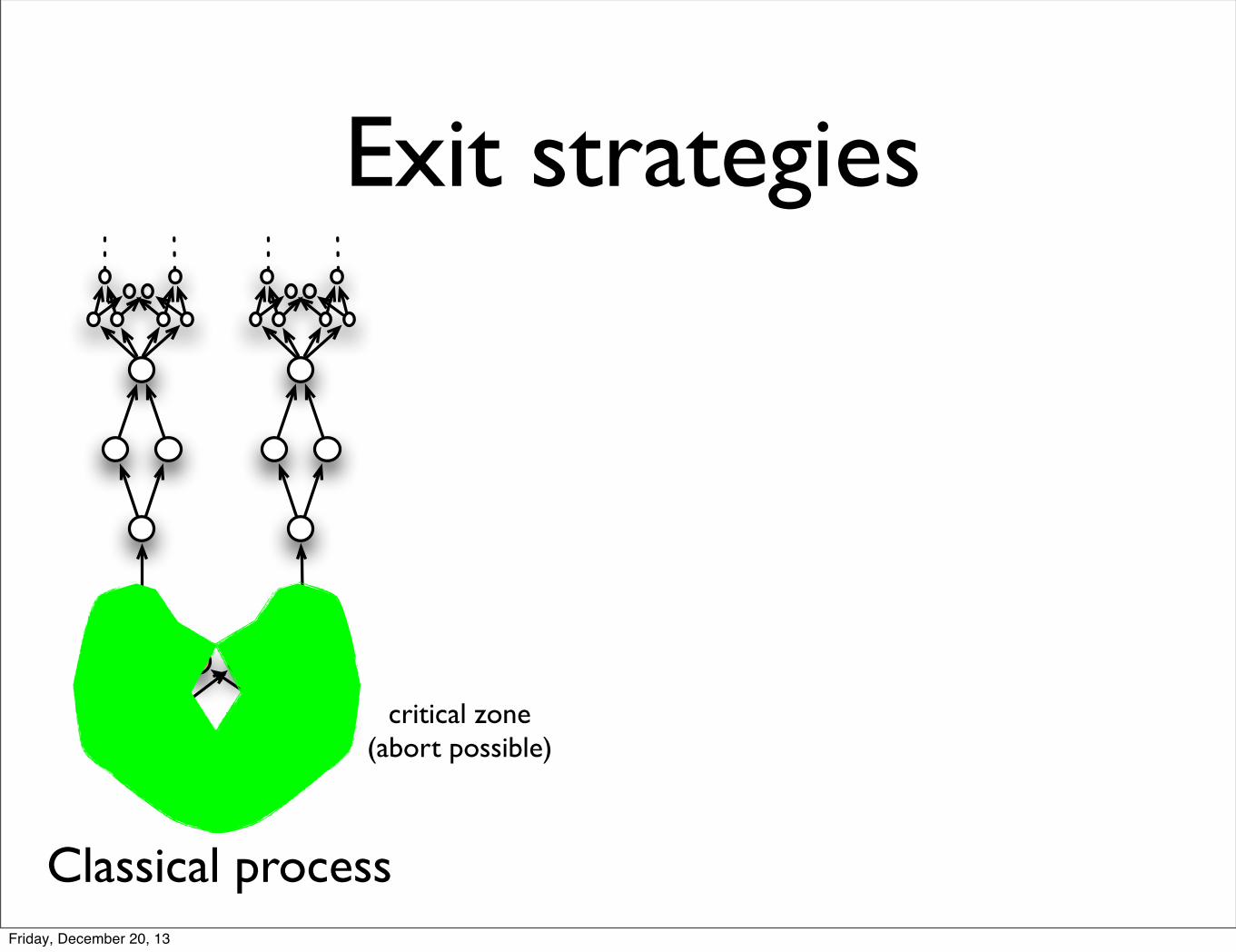
Exit strategies
Classical process
critical zone(abort possible)
Friday, December 20, 13
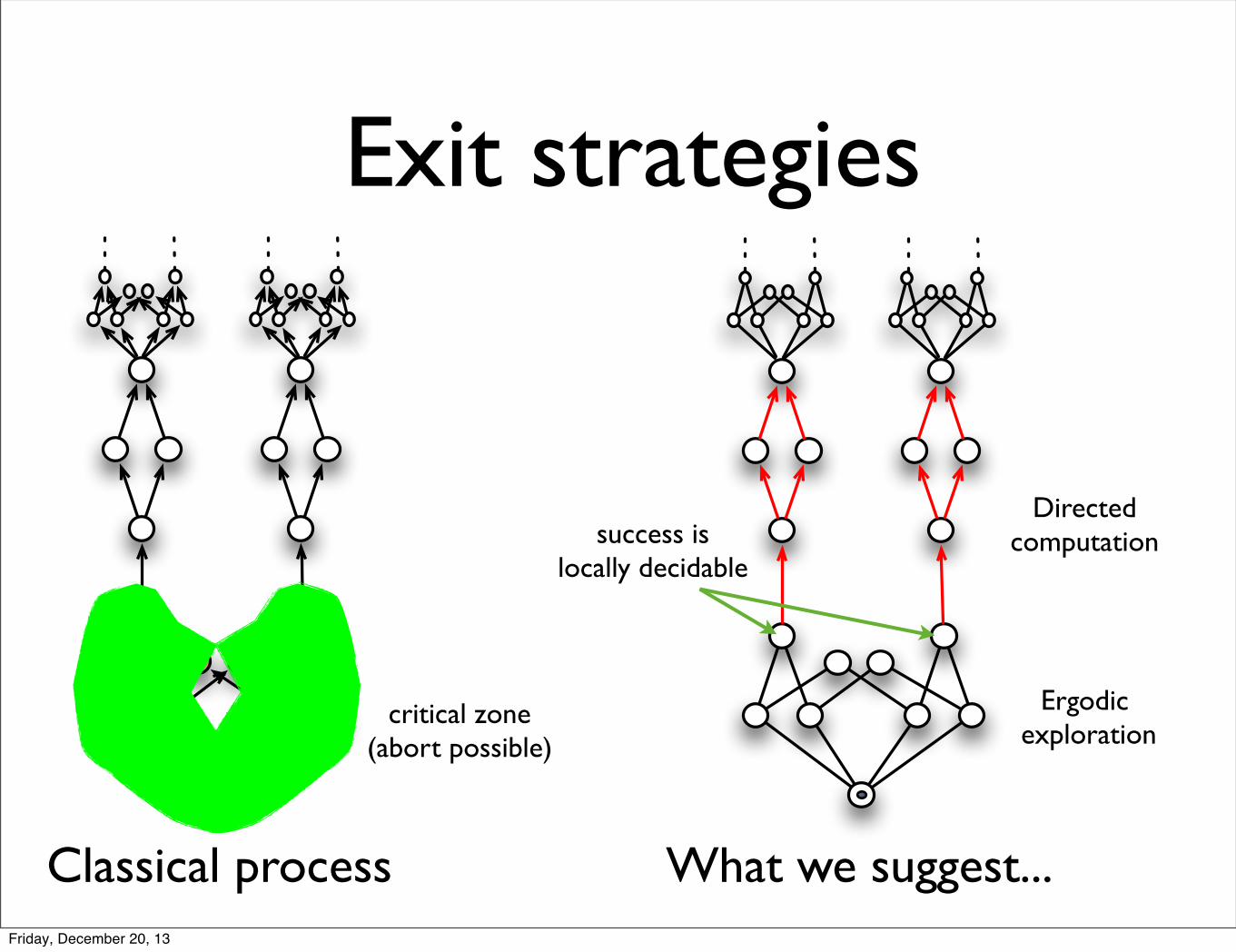
Exit strategies
Classical process What we suggest...
critical zone(abort possible)
Ergodic exploration
success is locally decidable
Directedcomputation
Friday, December 20, 13
Negative events
a2, b1a1, b2
a1, b1 a2, b2
a2 b2
a1b1
a1
;
b1
b2
classicalresidual
;
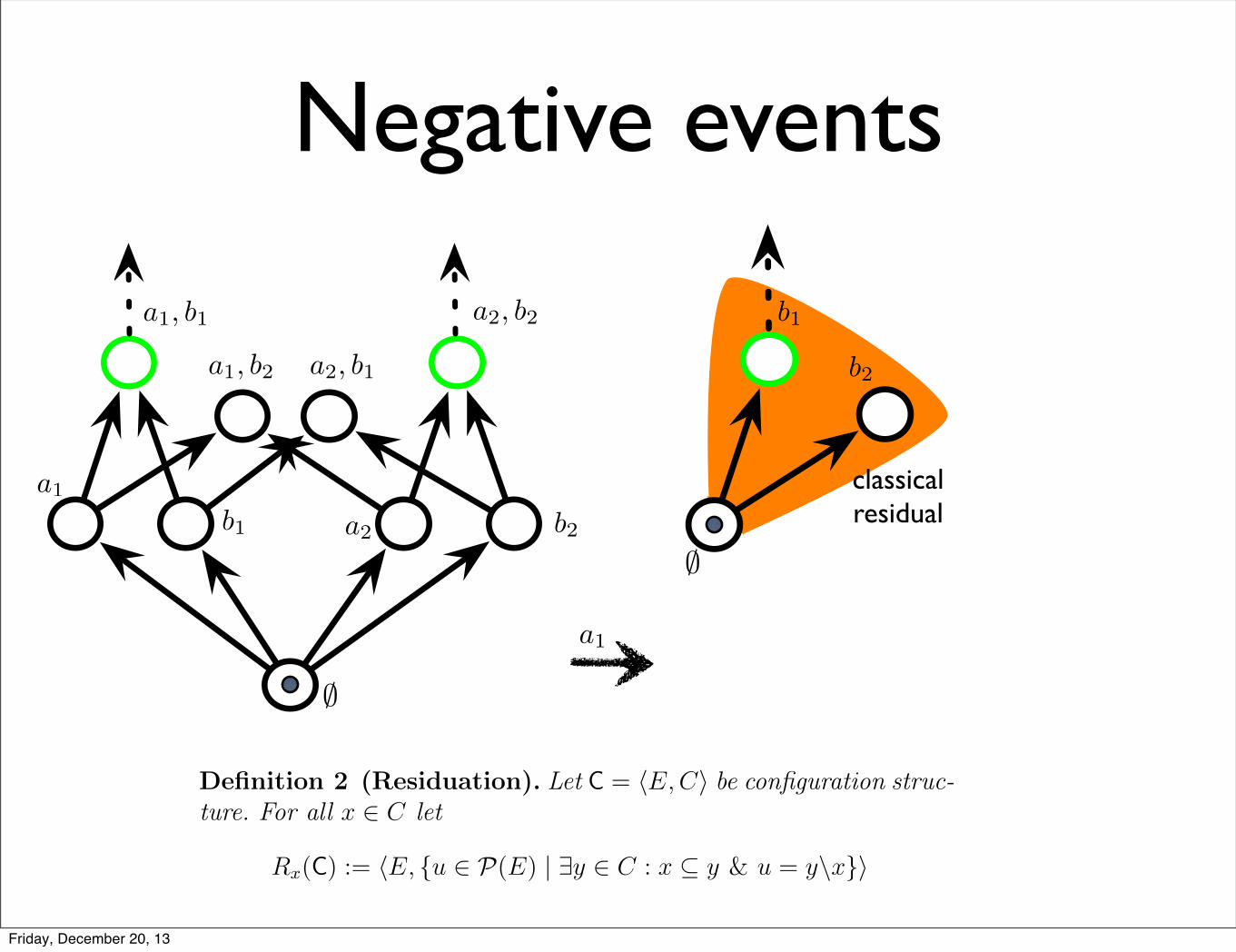
Definition 1 (Stable configuration structures). Let C = hE,Cibe a configuration structure. Say that C is stable if it is:
– rooted: ; 2 C
– connected: 8x 2 C : x 6= ; ) 9e 2 x : x \ {e} 2 C
– closed under bounded union: 8x, y, z 2 C : x[y ✓ z ) x[y 2 C
– closed under bounded intersection: 8x, y, z 2 C : x [ y ✓ z )x \ y 2 C
We can now define a simple residuation operation, adapted fromRef. [5].
Definition 2 (Residuation). Let C = hE,Ci be configuration struc-
ture. For all x 2 C let
R
x
(C) := hE, {u 2 P(E) | 9y 2 C : x ✓ y & u = y\x}i
An alternative definition isRx
(C) := hE, "x\xi with "x := {y 2 C | x ✓ y}.
Property 2. Let C = hE,Ci be a configuration structure:
8x 2 C : C is stable ) R
x
(C) is stable (2)
R;(C) = C (3)
8x 2 C, 8y 2 R
x
(C) : x [ y 2 C & R
y
(Rx
(C)) = R
x[y(C) (4)
3 Signed configuration structures
We extend here the constructs introduced in the previous section todeal with reversible computations. x 2 MZ(E) is a signed configu-
rations (over events in E), represented as a multiset of events withvalues in {�1, 0, 1}. We will use the notation x = {�e, e0, e00} to de-note a multiset containing �1 occurrence of e and one occurrence ofe
0 and e
00. For such multisets we use µx
: E ! {�1, 0, 1} to denote themultiplicity of an event in x. Let � : MZ(E) ⇥MZ(E) ! MZ(E)denote the multiset union and : MZ(E) ⇥MZ(E) ! MZ(E)denote the multiset subtraction, where for all e 2 E:
µ
M0�M1(e) = µ
M0(e) + µ
M1(e)µ
M0 M1(e) = µ
M0(e)� µ
M1(e)
Friday, December 20, 13
Negative events
a2, b1a1, b2
a1, b1 a2, b2
a2 b2
a1b1
a1
;
b1
b2
classicalresidual
;
Let |.| : MZ(E) ! P(E) denote the support of a signed configura-tion x and let x, y be two signed configurations. Say that x v y if|x| ✓ |y| and for all e 2 x, µ
x
(e) = µ
y
(e). For instance ; v {�e}and ; v {e} but {�e} 6v {e}. Also {�e, e0} v {�e, e0,�e00}. For allsigned configuration x we also use �x to denote the signed configu-ration such that µ
x
(e) := �µ�x
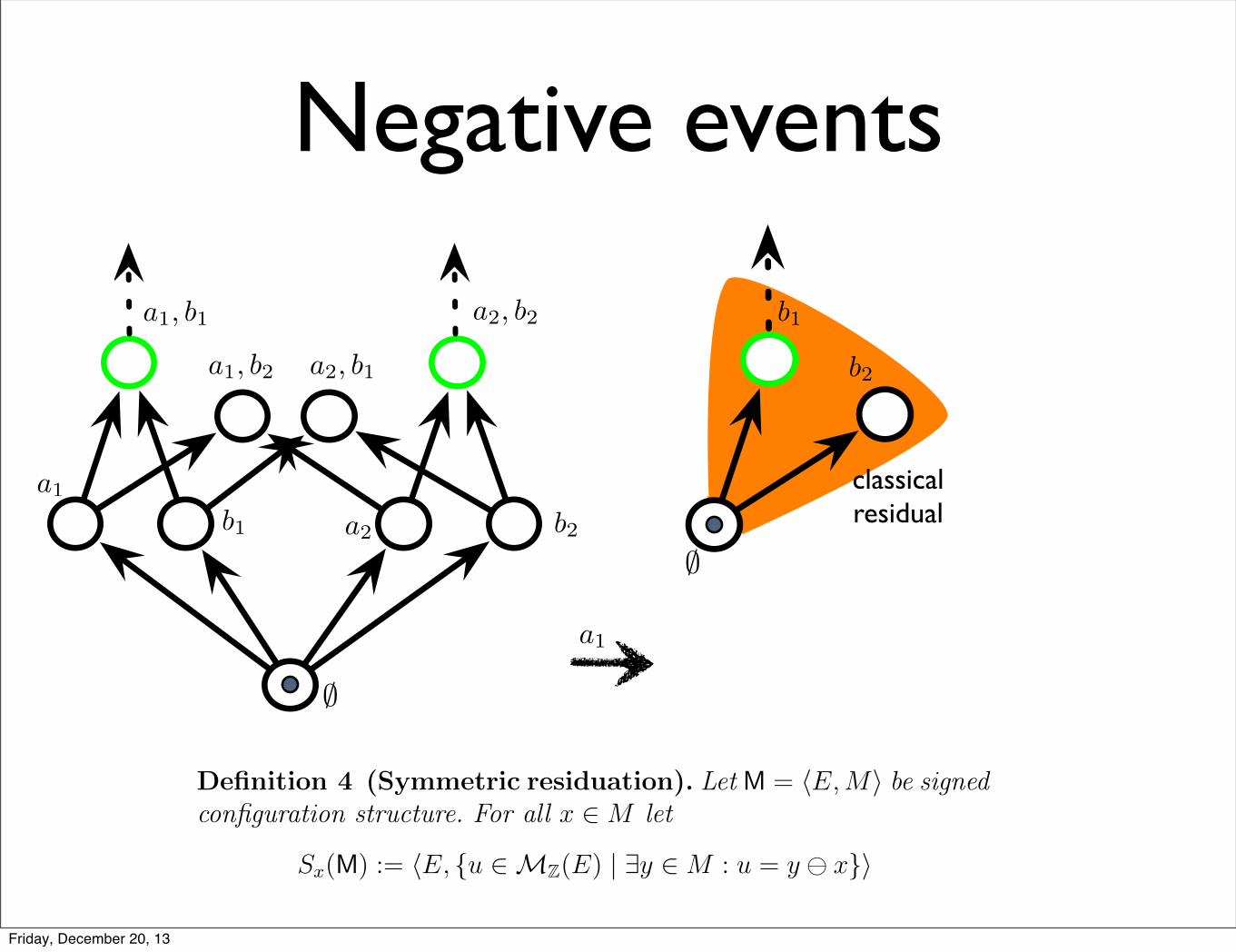
(e).A signed configuration structure is a pair M = hE,Mi where E
is a set of events and M is a set of signed configurations partiallyordered by v.
Definition 3 (Stable signed configuration structures). Let M =hE,Mi be a signed configuration structure. Say that M is stable if it
is:
– rooted: ; 2M
– connected: 8x 2 M : x 6= ; ) 9y 2 M : |x y| = {e} for some
e 2 E.
– closed under bounded sum: 8x, y, z 2M : (x[y) v z ) x[y 2M
– closed under bounded intersection: 8x, y, z 2 M : (x [ y) v z )(x \ y) 2M
where \ and [ denote respectively the multiset intersection and union
operations.
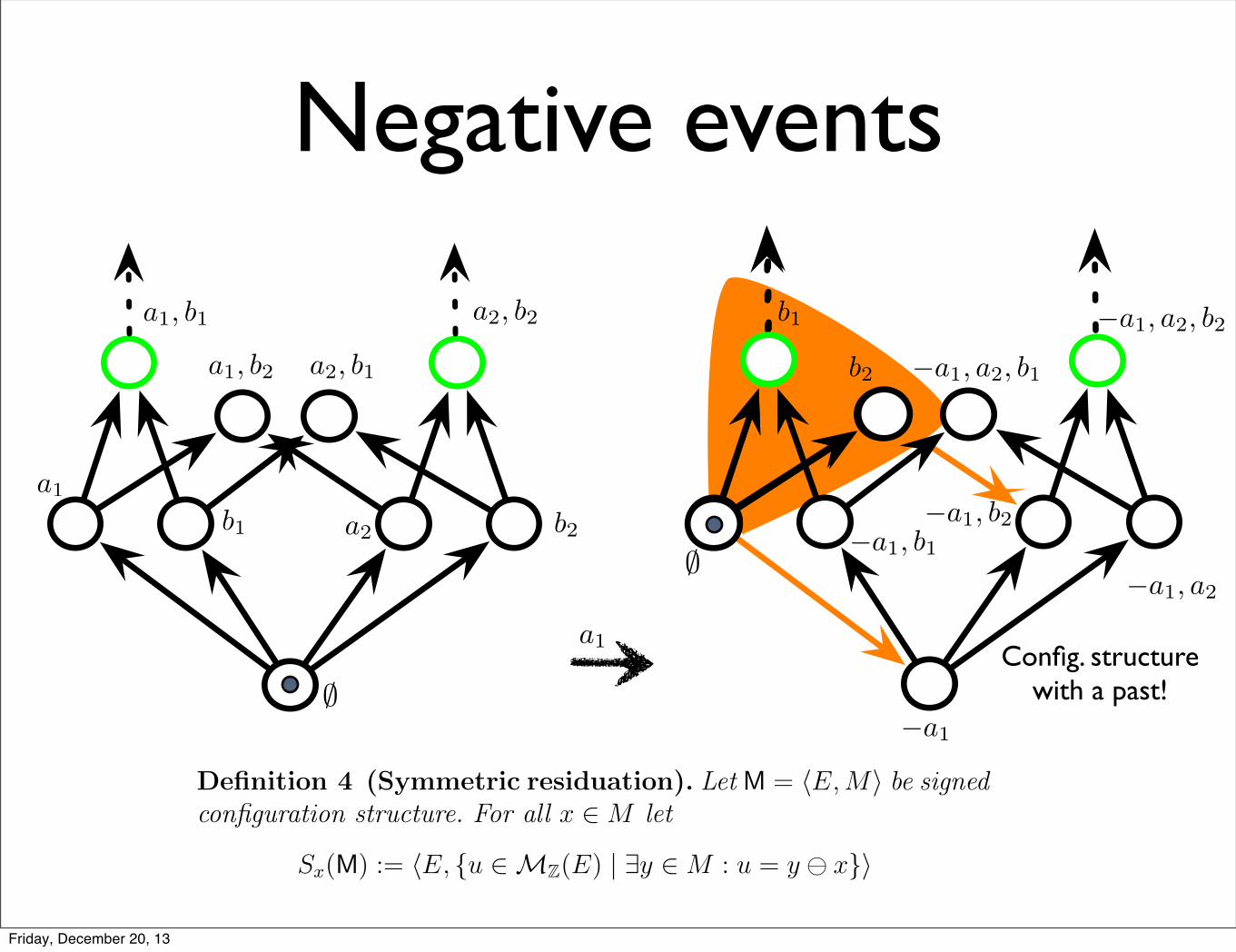
The notion of past of a computation in a signed configurationstructure is derived from the notion of symmetric residuation:
Definition 4 (Symmetric residuation). Let M = hE,Mi be signedconfiguration structure. For all x 2M let
S
x
(M) := hE, {u 2MZ(E) | 9y 2M : u = y x}i
Note that the condition x ✓ y has been dropped and that x y isalways defined for all signed configurations x, y.
Property 3. Let M = hE,Mi be a signed configuration structure:
8x 2 C : M is stable ) S
x
(M) is stable (5)
S;(M) = M (6)
8x 2M : �x 2 S
x
(M) (7)
8x 2M : y 2 S
x
(M)) x� y 2 M & S
y
(Sx
(M)) = S
x�y
(M) (8)
Friday, December 20, 13
Negative events
a2, b1a1, b2
a1, b1 a2, b2
a2 b2
a1b1
a1
;
b1
b2
�a1
�a1, b1
�a1, a2
�a1, a2, b1
�a1, a2, b2
�a1, b2
Config. structure with a past!;
Let |.| : MZ(E) ! P(E) denote the support of a signed configura-tion x and let x, y be two signed configurations. Say that x v y if|x| ✓ |y| and for all e 2 x, µ
x
(e) = µ
y
(e). For instance ; v {�e}and ; v {e} but {�e} 6v {e}. Also {�e, e0} v {�e, e0,�e00}. For allsigned configuration x we also use �x to denote the signed configu-ration such that µ
x
(e) := �µ�x
(e).A signed configuration structure is a pair M = hE,Mi where E
is a set of events and M is a set of signed configurations partiallyordered by v.
Definition 3 (Stable signed configuration structures). Let M =hE,Mi be a signed configuration structure. Say that M is stable if it
is:
– rooted: ; 2M
– connected: 8x 2 M : x 6= ; ) 9y 2 M : |x y| = {e} for some
e 2 E.
– closed under bounded sum: 8x, y, z 2M : (x[y) v z ) x[y 2M
– closed under bounded intersection: 8x, y, z 2 M : (x [ y) v z )(x \ y) 2M
where \ and [ denote respectively the multiset intersection and union
operations.
The notion of past of a computation in a signed configurationstructure is derived from the notion of symmetric residuation:
Definition 4 (Symmetric residuation). Let M = hE,Mi be signedconfiguration structure. For all x 2M let
S
x
(M) := hE, {u 2MZ(E) | 9y 2M : u = y x}i
Note that the condition x ✓ y has been dropped and that x y isalways defined for all signed configurations x, y.
Property 3. Let M = hE,Mi be a signed configuration structure:
8x 2 C : M is stable ) S
x
(M) is stable (5)
S;(M) = M (6)
8x 2M : �x 2 S
x
(M) (7)
8x 2M : y 2 S
x
(M)) x� y 2 M & S
y
(Sx
(M)) = S
x�y
(M) (8)
Friday, December 20, 13
Properties
Let |.| : MZ(E) ⇧ P(E) denote the support of a signed configura-tion x and let x, y be two signed configurations. Say that x � y if|x| ⌅ |y| and for all e ⌥ x, µx(e) = µy(e). For instance ↵ � {�e}and ↵ � {e} but {�e} �� {e}. Also {�e, e⇤} � {�e, e⇤,�e⇤⇤}. For allsigned configuration x we also use �x to denote the signed configu-ration such that µx(e) := �µ�x(e).
A signed configuration structure is a pair M = ✓E,M◆ where Eis a set of events and M is a set of signed configurations partiallyordered by �.
Definition 3 (Stable signed configuration structures). Let M =✓E,M◆ be a signed configuration structure. Say that M is stable if itis:
– rooted: ↵ ⌥ M– connected: x ⌥ M : x �= ↵ ⌃ ⌦y ⌥ M : |x ⇤ y| = {e} for some
e ⌥ E.– closed under bounded sum: x, y, z ⌥ M : (x�y) � z ⌃ x�y ⌥ M– closed under bounded intersection: x, y, z ⌥ M : (x � y) � z ⌃
(x ✏ y) ⌥ M
where ✏ and � denote respectively the multiset intersection and unionoperations.
The notion of past of a computation in a signed configurationstructure is derived from the notion of symmetric residuation:
Definition 4 (Symmetric residuation). Let M = ✓E,M◆ be signedconfiguration structure. For all x ⌥ M let
Sx(M) := ✓E, {u ⌥ MZ(E) | ⌦y ⌥ M : u = y ⇤ x}◆
Note that the condition x ⌅ y has been dropped and that x ⇤ y isalways defined for all signed configurations x, y.
Property 3. Let M = ✓E,M◆ be a signed configuration structure:
x ⌥ C : M is stable ⌃ Sx(M) is stable (5)
S⌅(M) = M (6)
x ⌥ M : �x ⌥ Sx(M) (7)
x ⌥ M : y ⌥ Sx(M) ⌃ x⇥ y ⌥ M & Sy(Sx(M)) = Sx⇥y(M) (8)
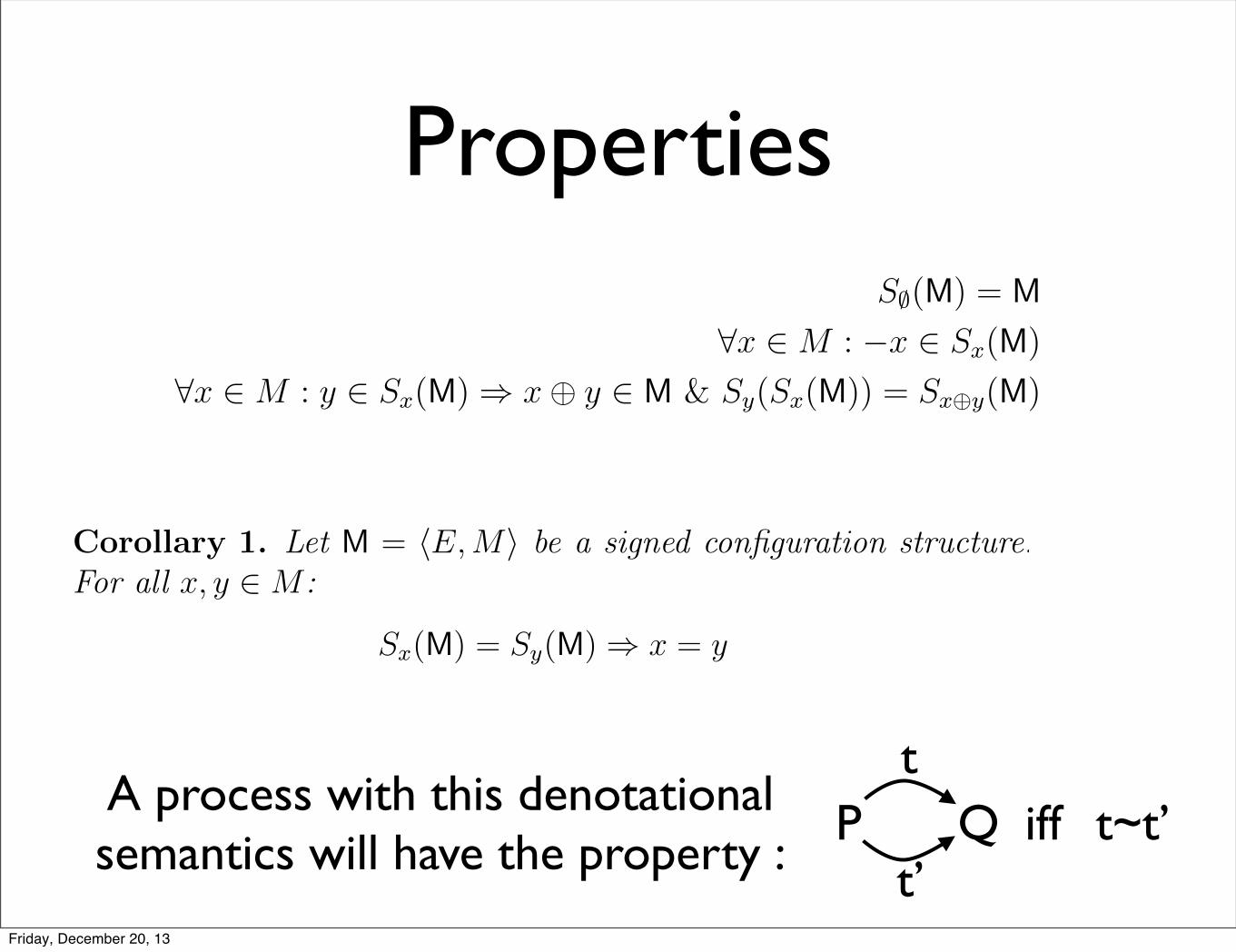
Corollary 1. Let M = ⌃E,M⌥ be a signed configuration structure.For all x, y ⇤ M :
Sx(M) = Sy(M) ⇥ x = y
Proof. By Prop.7 we have S�y(Sx(M)) = M. Furthermore, by Prop. 8we have S�y⇥x(M) = M and S�y⇥x(M) = S⇤(M) by Prop 6. Hencex = y.
As with classical configuration structures, (symmetric) residu-ation preserves stability of (signed) configurations (Prop. 5). Alsothe residual of M after the empty configuration is just the restric-tion of M to its reachable configurations (Prop. 6). Proposition 7is reminiscent to a classical property of reversible systems statingthat if a computation x can be performed from M then its reversecomputation may occur from Sx(M). This is stated as a loop lemmain the reversible process algebra literature [1, 2, 4, 3]. Note that animportant di�erence here is that loop lemmas hold for computationtraces whereas we shall see that a signed configuration x capturesan equivalence class of traces, namely the equivalence up-to permu-tation and collapse of opposite transitions. Eventually Proposition 8states that the residuation operation defines morphisms of the cat-egory of computation, whose objects are signed configuration struc-ture. By proposition 7, these morphisms are also isos (a concrete wayto build the category of fractions?).
4 Prime event structures
A stable configuration structure C is equivalent to a prime eventstructure E = ⌃E,<,#⌥ in which every e ⇤ E is a complete primeof C and ex < ey if x � y and ex#ey if x ⇧ y ⌅⇤ C. In turn the leftclosed configurations of E denote the domain of configurations C.
It is natural to look at the counterpart of signed configurationin PES terminology. We will see that (stable) signed configurationsstructures denotes +/- PES which are a particular case of labelled(prime) event structure. The residuation operation naturally trans-ports to +/- PES.
Definition 5 (+/- PES). A +/- PES is a tuple E = ⌃E,<,#, �⌥where:
A process with this denotational semantics will have the property :
P Qt
t’iff t~t’
Friday, December 20, 13
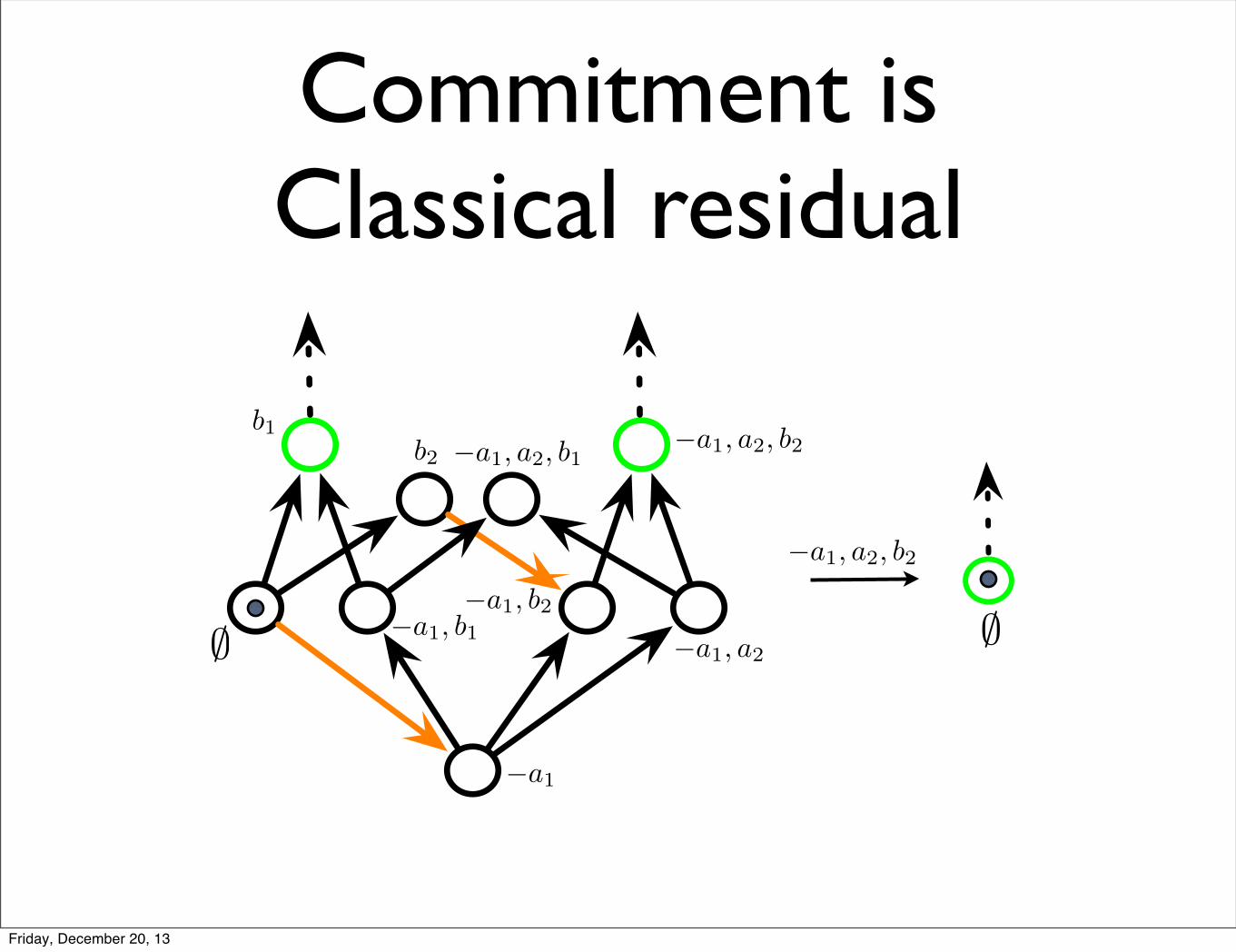
Commitment is Classical residual
�a1
;
b1b2
�a1, b1 �a1, a2
�a1, a2, b1�a1, a2, b2
�a1, b2;
�a1, a2, b2
Friday, December 20, 13
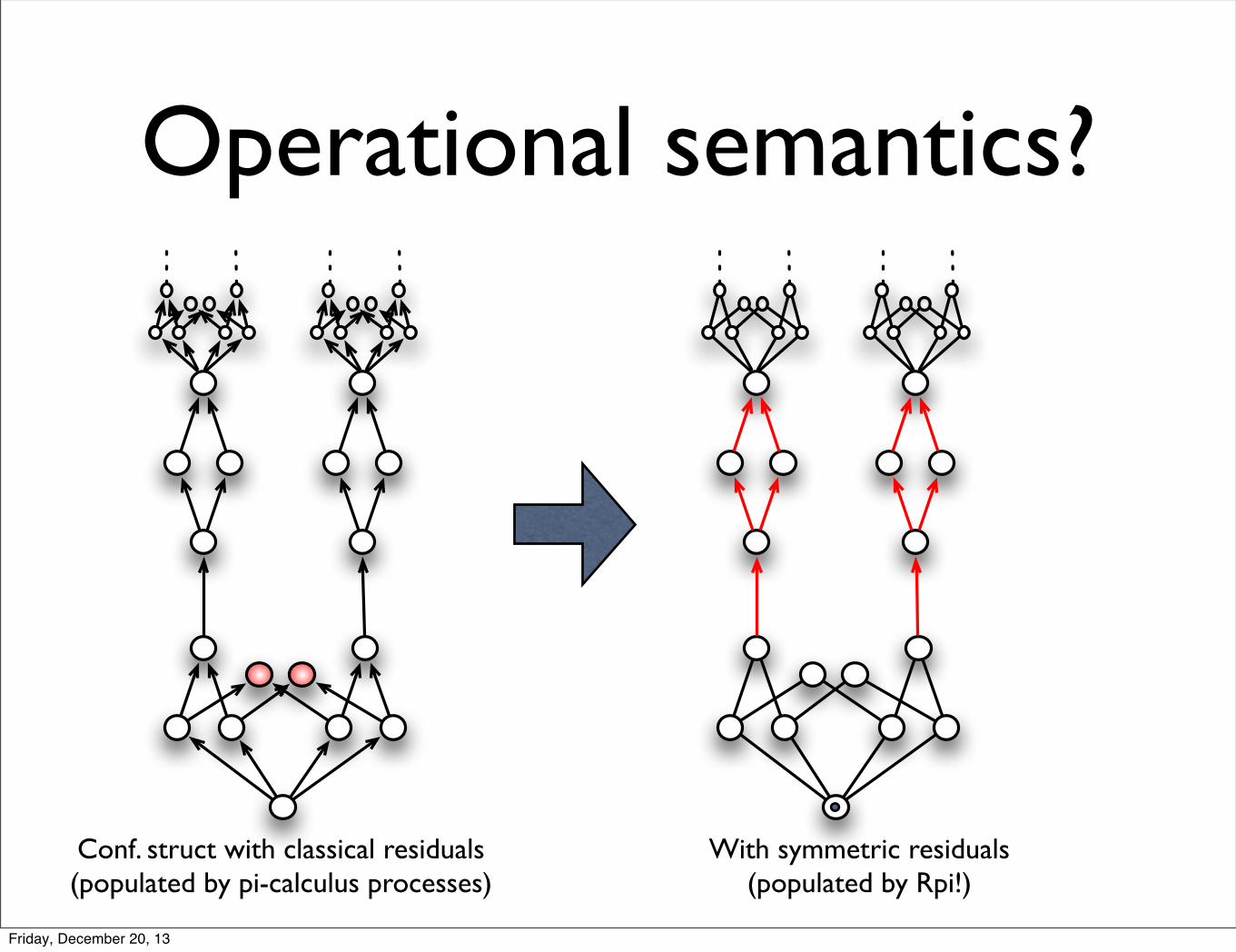
Operational semantics?
Conf. struct with classical residuals(populated by pi-calculus processes)
With symmetric residuals (populated by Rpi!)
Friday, December 20, 13
A digression on event structures...
• Stable conf. structures are isomorphic to Prime Event structures
• Symmetric residual preserves stability
• This entails a notion of symmetric residual for PES with negative events
Friday, December 20, 13
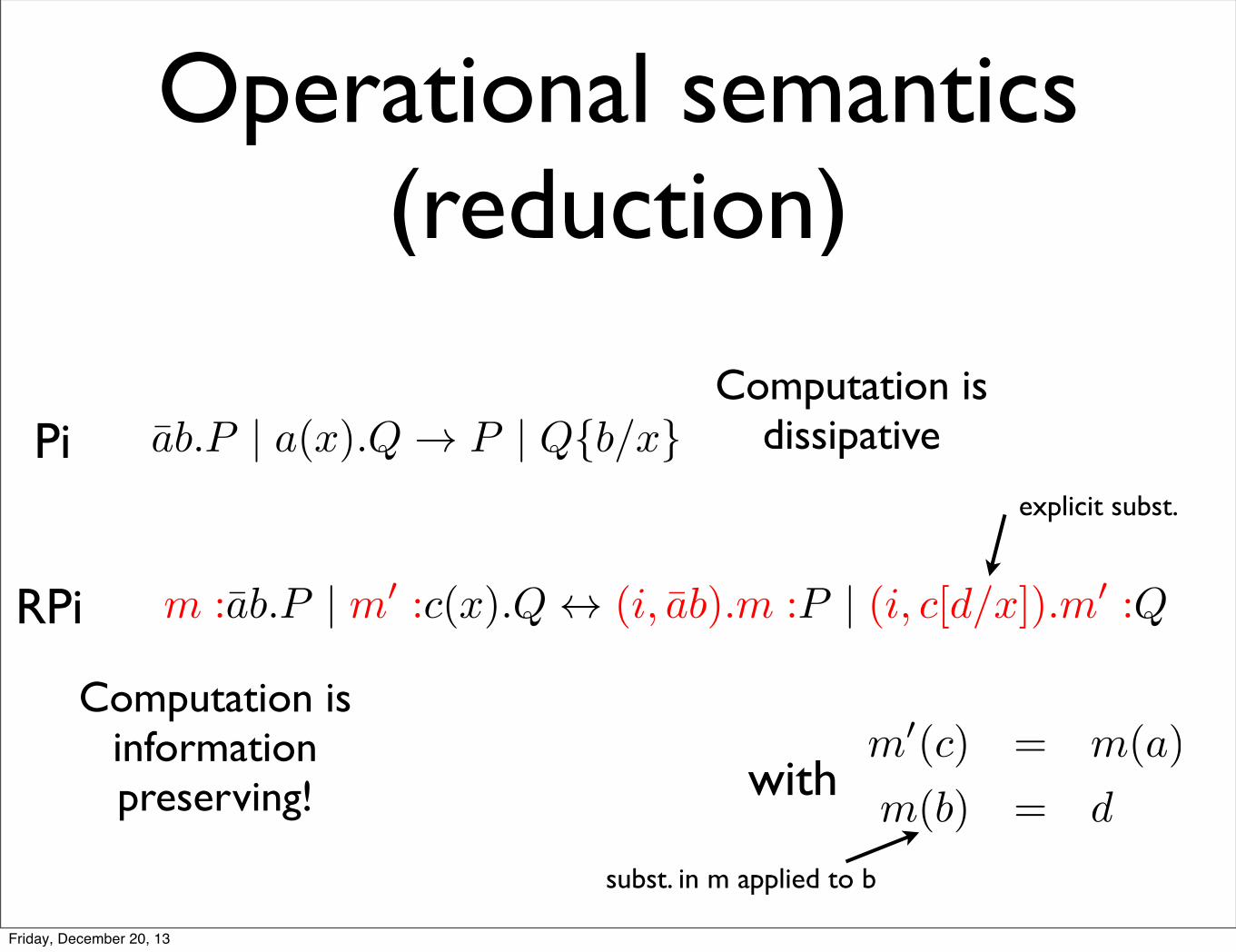
Operational semantics(reduction)
ab.P | a(x).Q ! P | Q{b/x}PiComputation is
dissipative
Friday, December 20, 13
Operational semantics(reduction)
ab.P | a(x).Q ! P | Q{b/x}Pi
m0(c) = m(a)
m(b) = dwith
explicit subst.
m :ab.P | m0 :c(x).Q $ (i, ab).m :P | (i, c[d/x]).m0 :Q
subst. in m applied to b
RPi
Computation is information preserving!
Computation is dissipative
Friday, December 20, 13
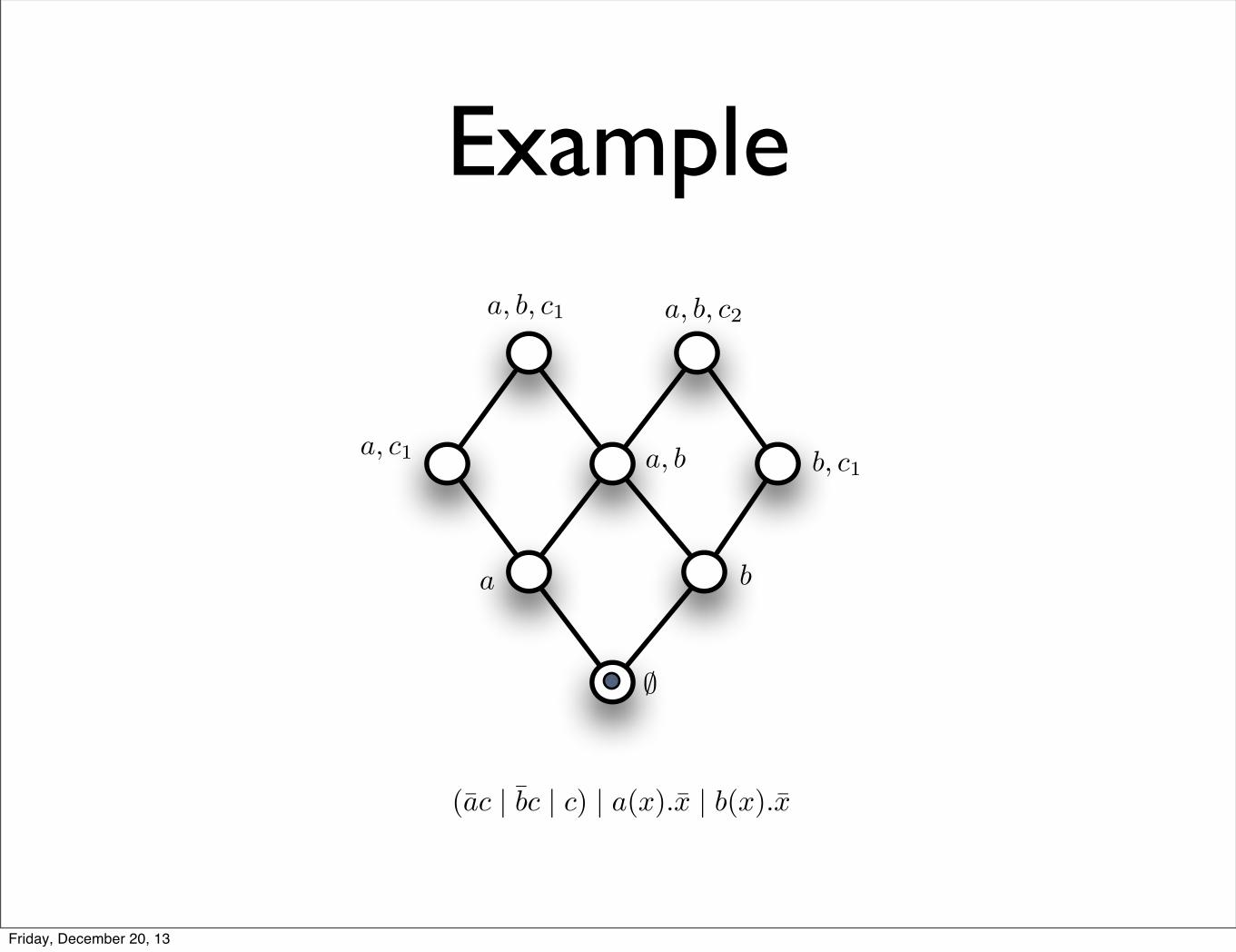
Example
(ac | bc | c) | a(x).x | b(x).x
;
a b
a, c1 b, c1a, b
a, b, c1 a, b, c2
Friday, December 20, 13
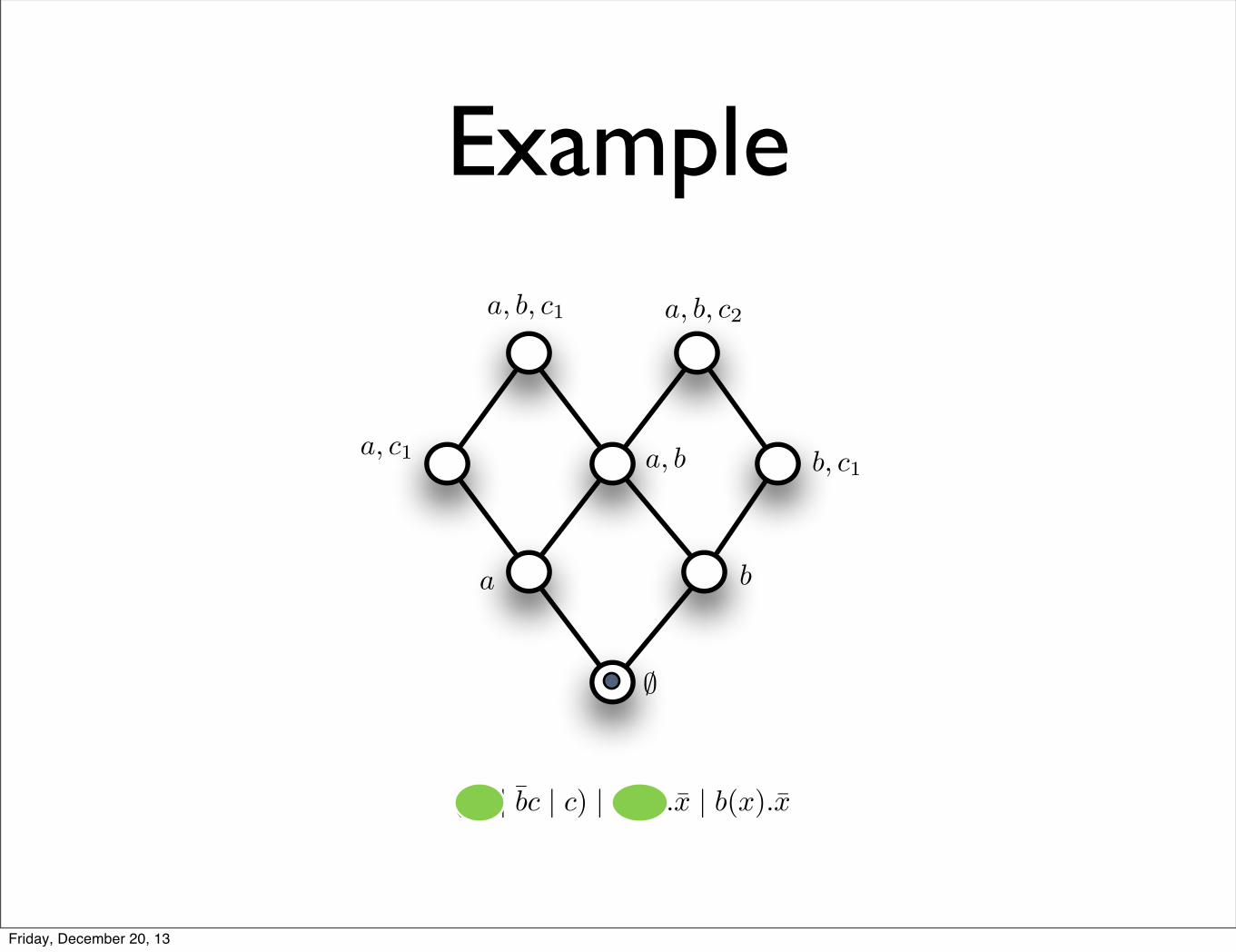
Example
(ac | bc | c) | a(x).x | b(x).x
;
a b
a, c1 b, c1a, b
a, b, c1 a, b, c2
Friday, December 20, 13
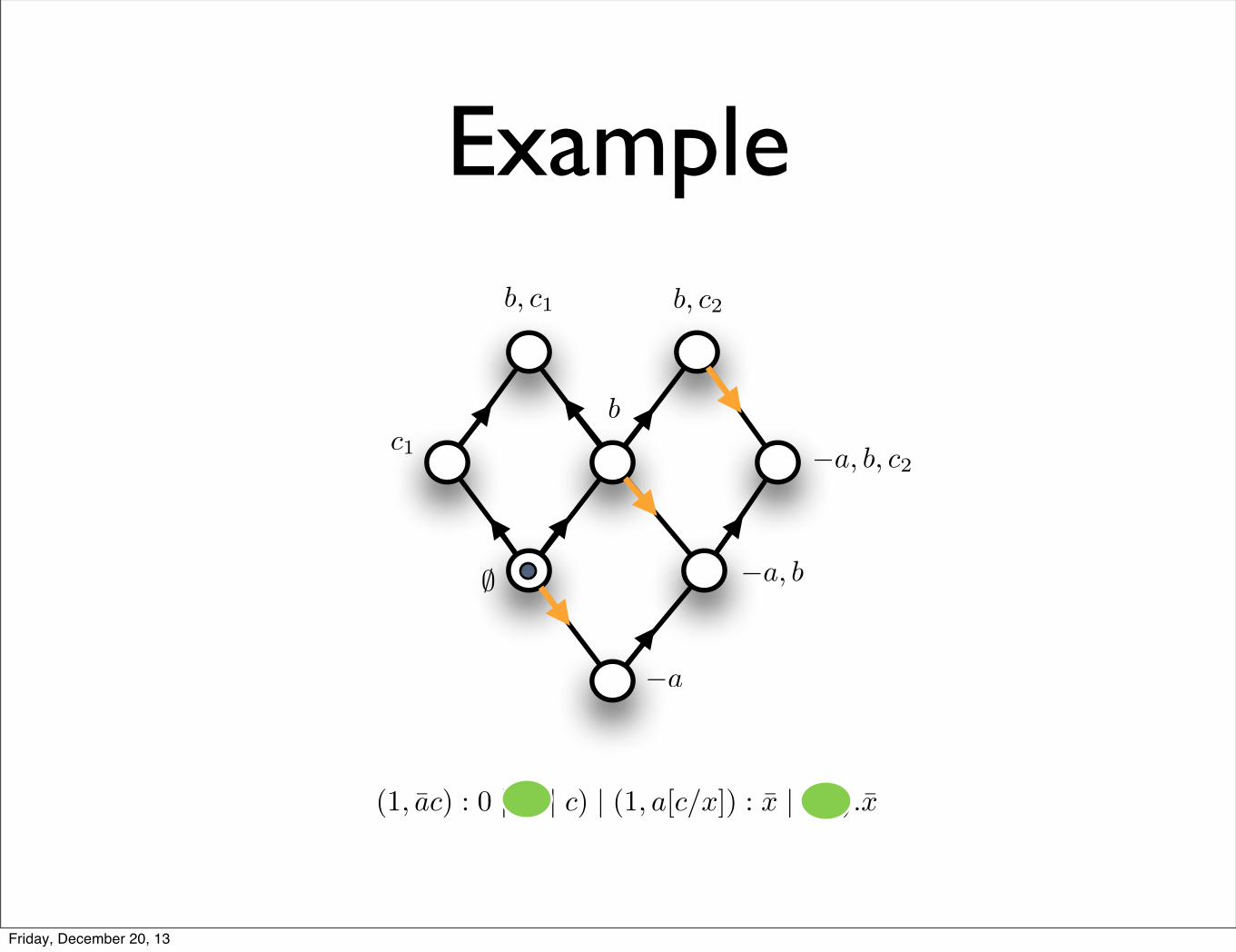
Example
(1, ac) : 0 | bc | c) | (1, a[c/x]) : x | b(x).x
;
�a
c1
b, c1
b
�a, b
�a, b, c2
b, c2
Friday, December 20, 13
Example
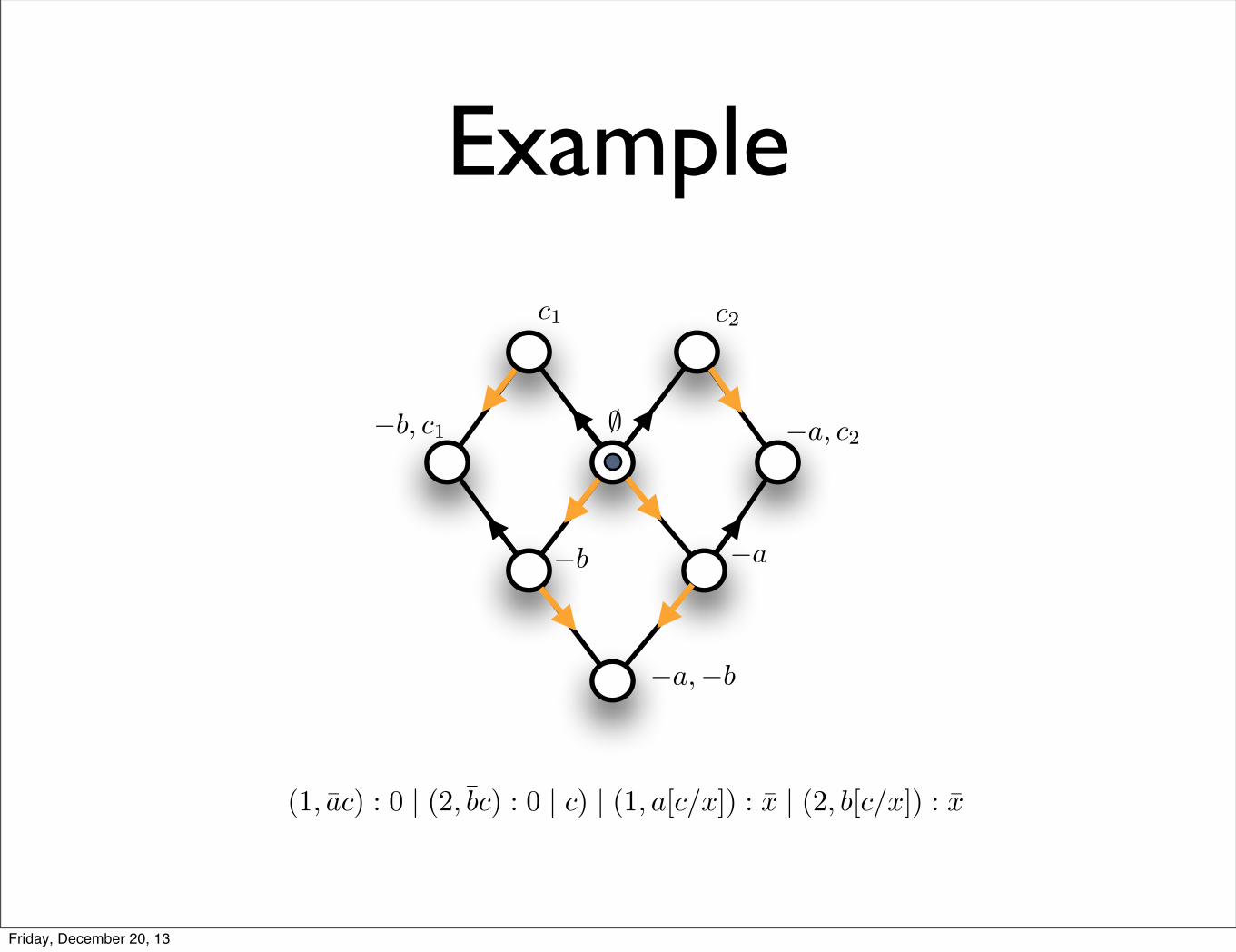
(1, ac) : 0 | (2, bc) : 0 | c) | (1, a[c/x]) : x | (2, b[c/x]) : x
;
�b
c1 c2
�b, c1 �a, c2
�a
�a,�b
Friday, December 20, 13
What about compositional
semantics?
Friday, December 20, 13
The classical LTSab.P | a(x).Q ! P | Q{b/x}
Friday, December 20, 13
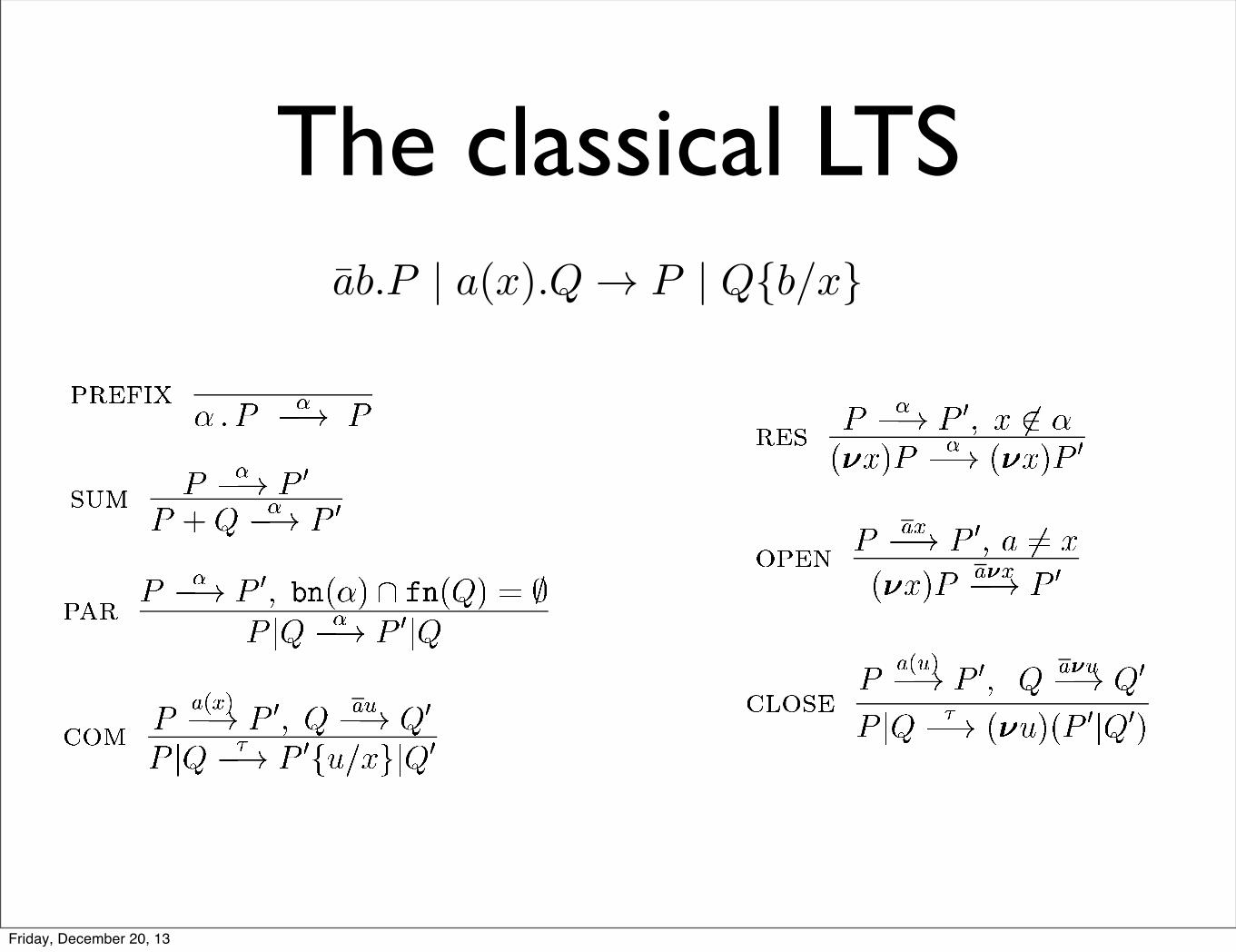
The classical LTSab.P | a(x).Q ! P | Q{b/x}
Friday, December 20, 13
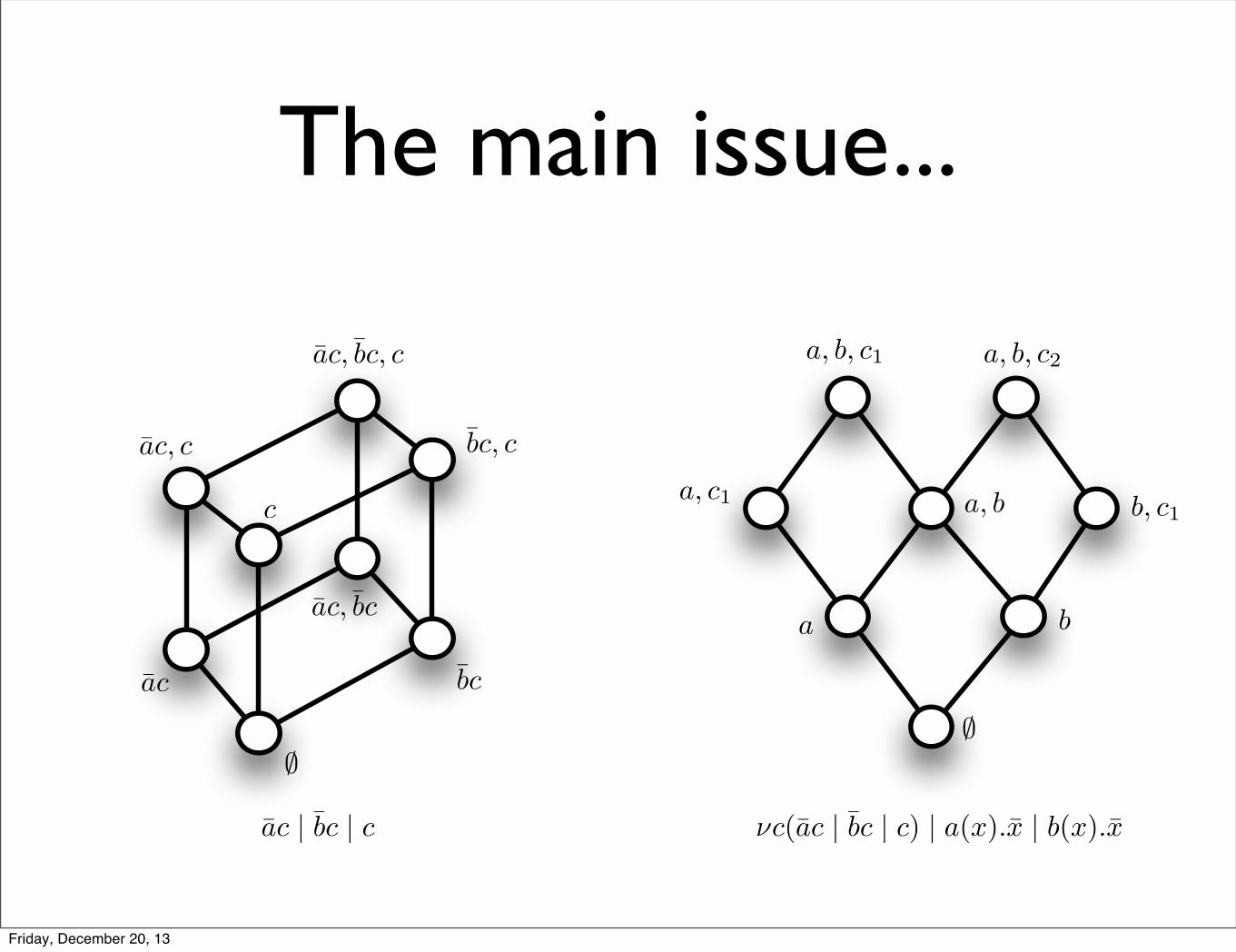
The main issue...
;
a b
a, c1 b, c1a, b
a, b, c1 a, b, c2
⌫c(ac | bc | c) | a(x).x | b(x).x
;
ac bc
c
ac, c bc, c
ac, bc
ac, bc, c
ac | bc | c
Friday, December 20, 13
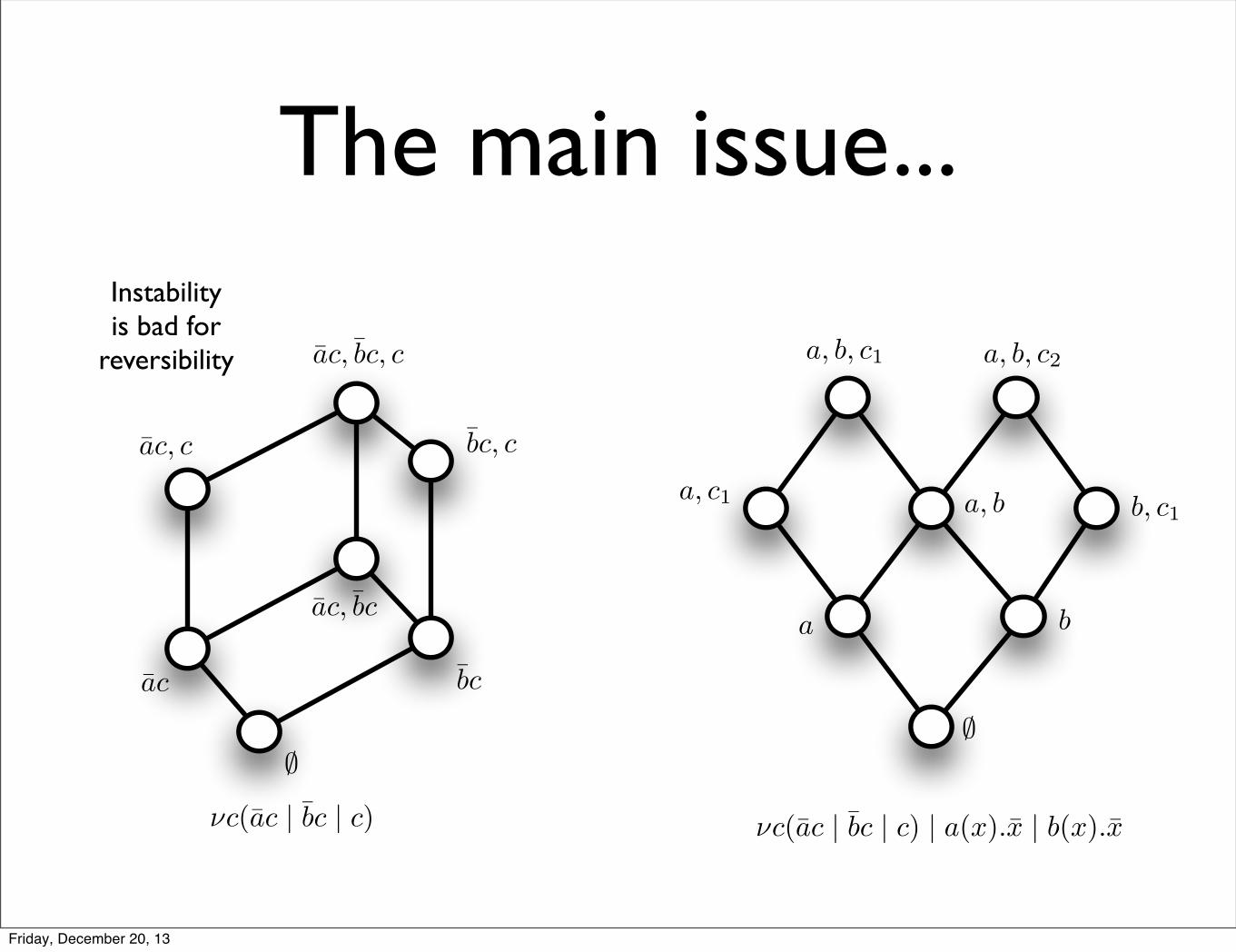
The main issue...
;
a b
a, c1 b, c1a, b
a, b, c1 a, b, c2
⌫c(ac | bc | c) | a(x).x | b(x).x
;
ac bc
ac, c bc, c
ac, bc
ac, bc, c
⌫c(ac | bc | c)
Instabilityis bad for
reversibility
Friday, December 20, 13
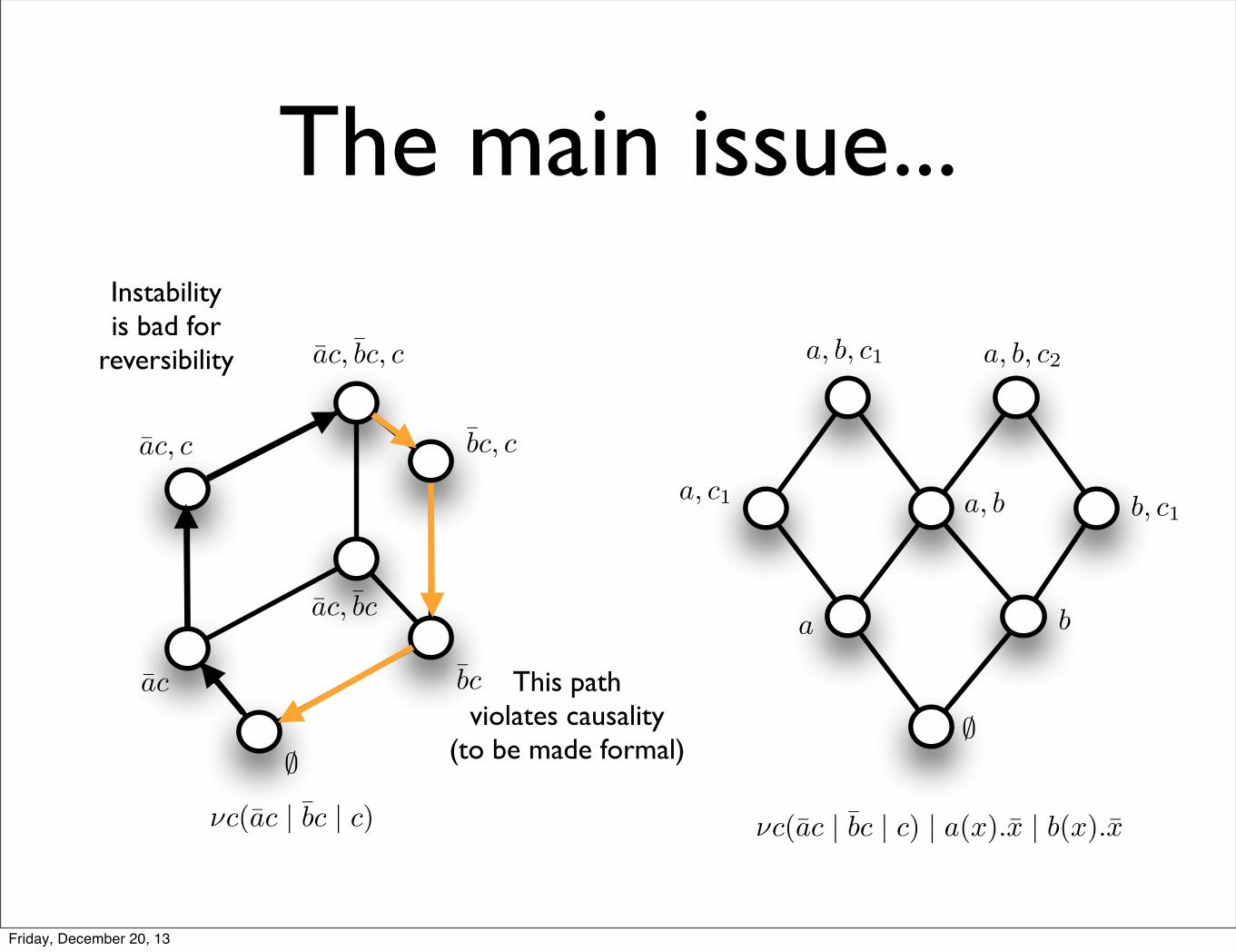
The main issue...
;
a b
a, c1 b, c1a, b
a, b, c1 a, b, c2
⌫c(ac | bc | c) | a(x).x | b(x).x
;
ac bc
ac, c bc, c
ac, bc
ac, bc, c
⌫c(ac | bc | c)
Instabilityis bad for
reversibility
This pathviolates causality
(to be made formal)
Friday, December 20, 13
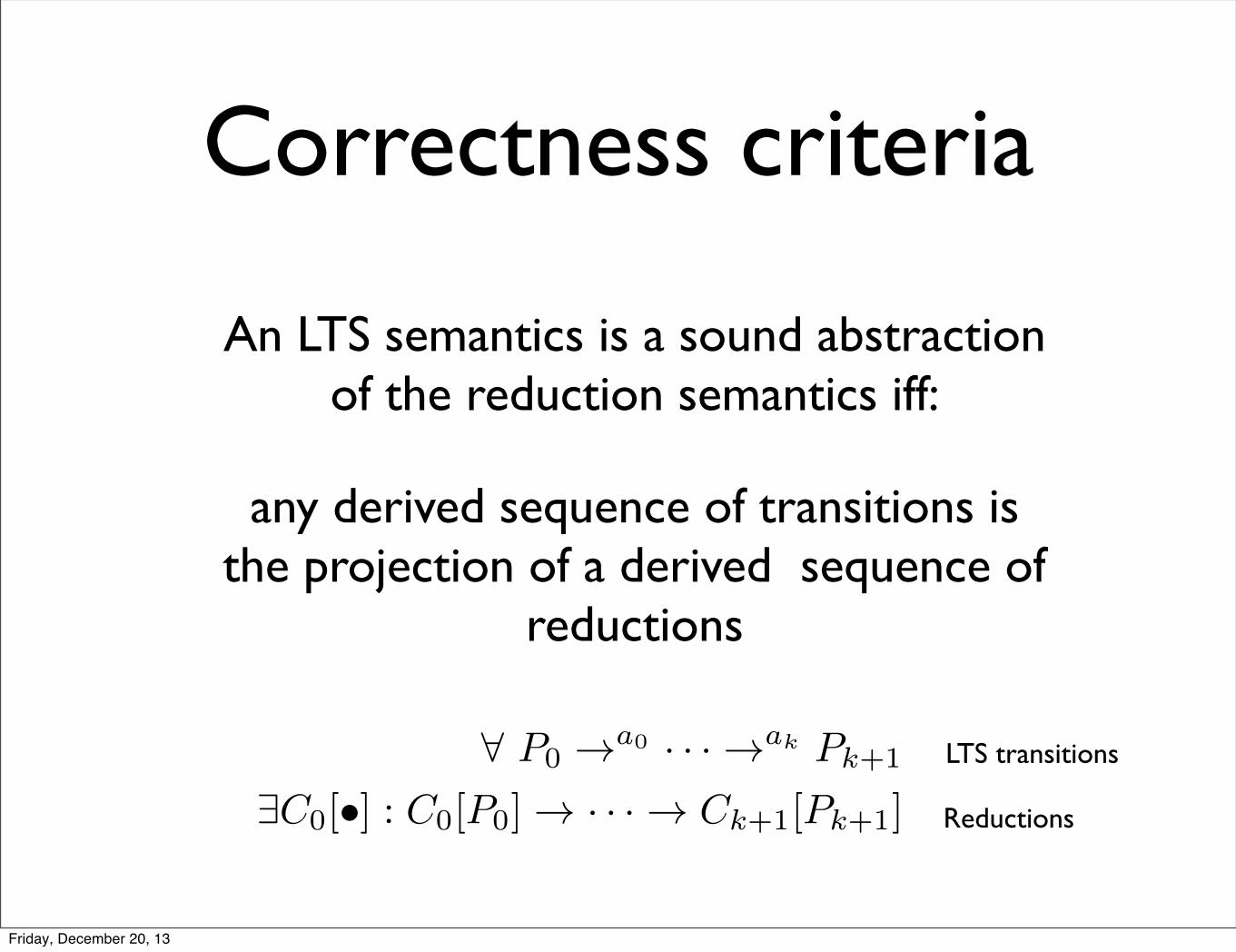
Correctness criteria
An LTS semantics is a sound abstraction of the reduction semantics iff:
any derived sequence of transitions is the projection of a derived sequence of
reductions
8 P0 !a0 · · · !ak Pk+1
9C0[•] : C0[P0] ! · · · ! Ck+1[Pk+1]
LTS transitions
Reductions
Friday, December 20, 13
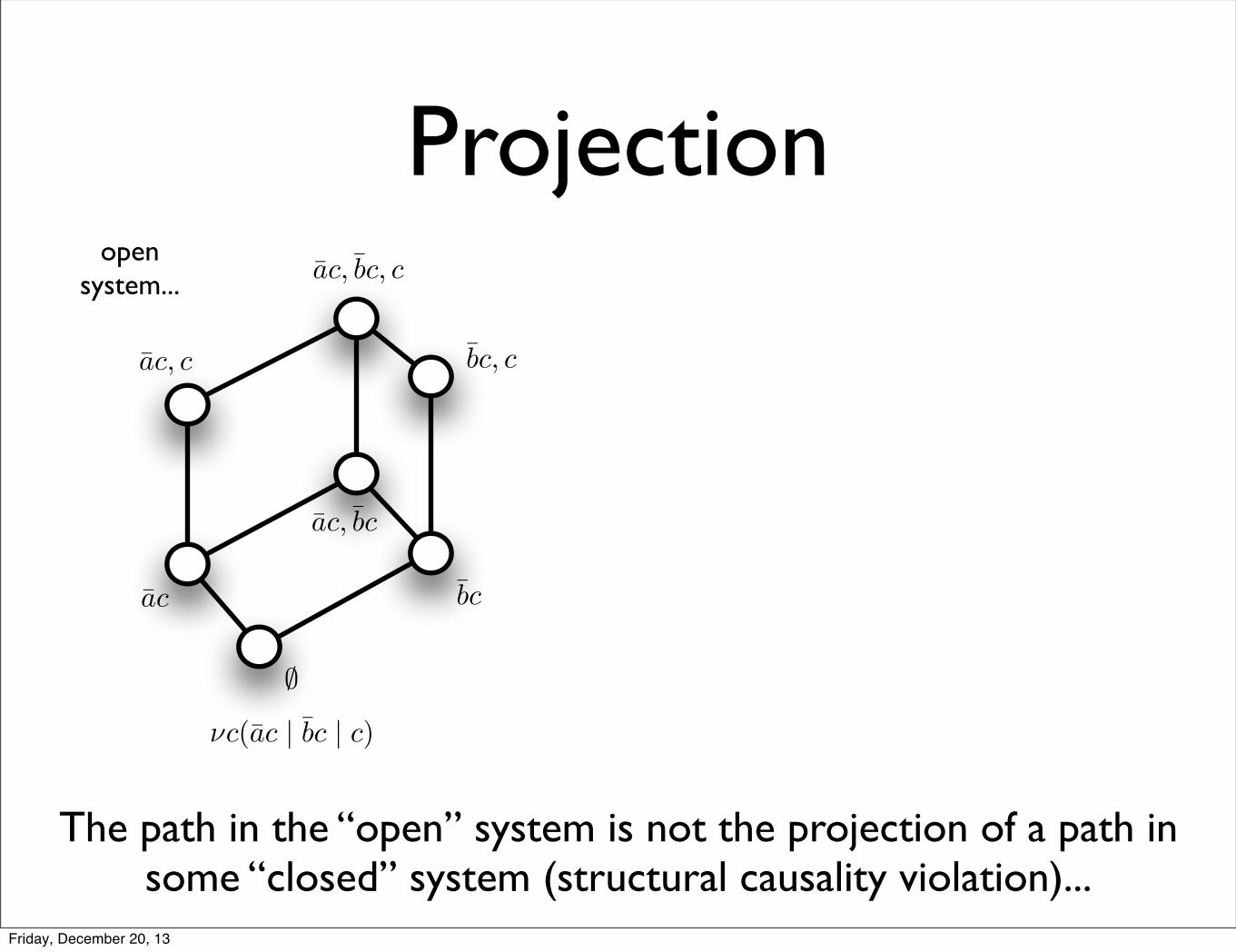
Projection
;
ac bc
ac, c bc, c
ac, bc
ac, bc, c
⌫c(ac | bc | c)
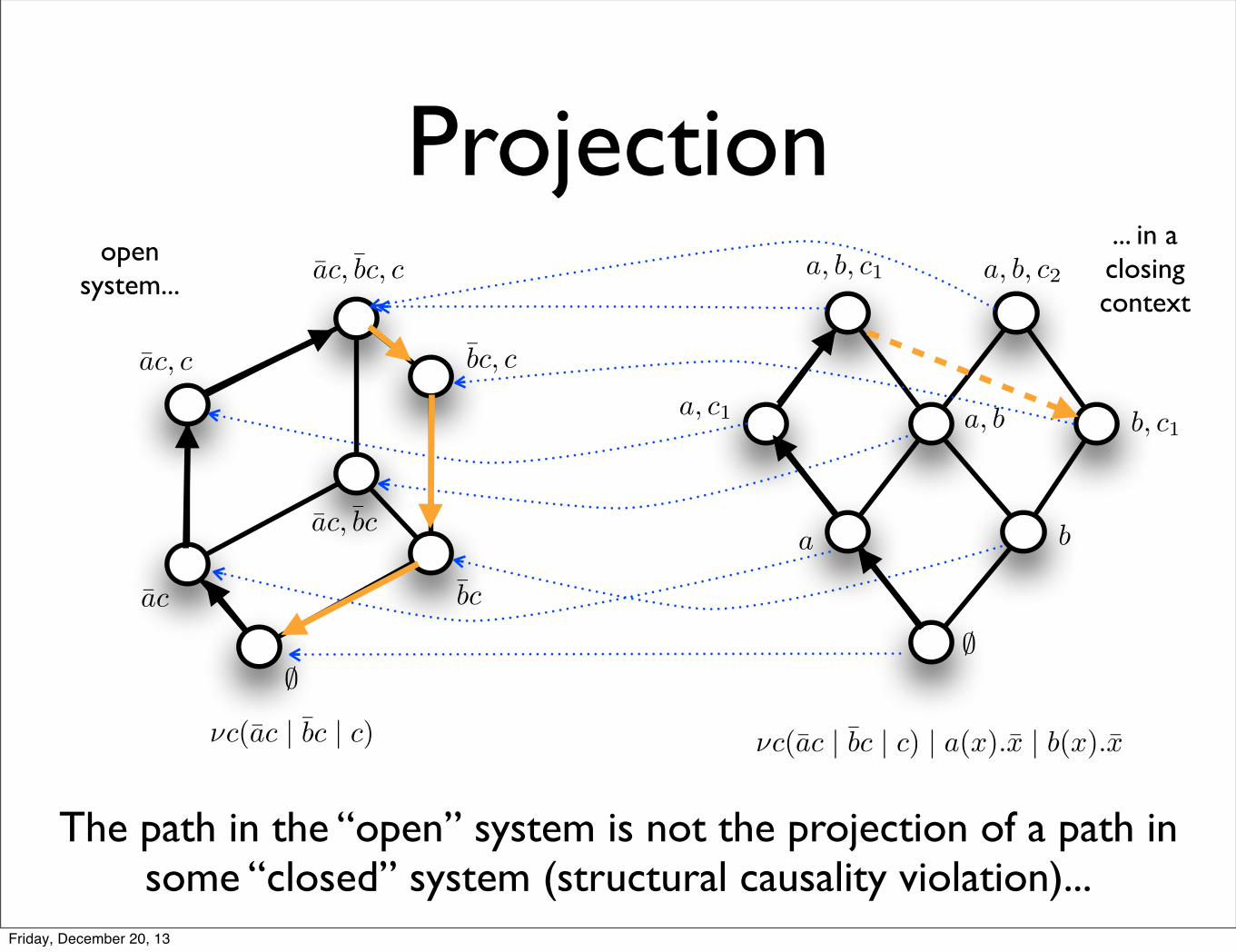
The path in the “open” system is not the projection of a path in some “closed” system (structural causality violation)...
opensystem...
Friday, December 20, 13
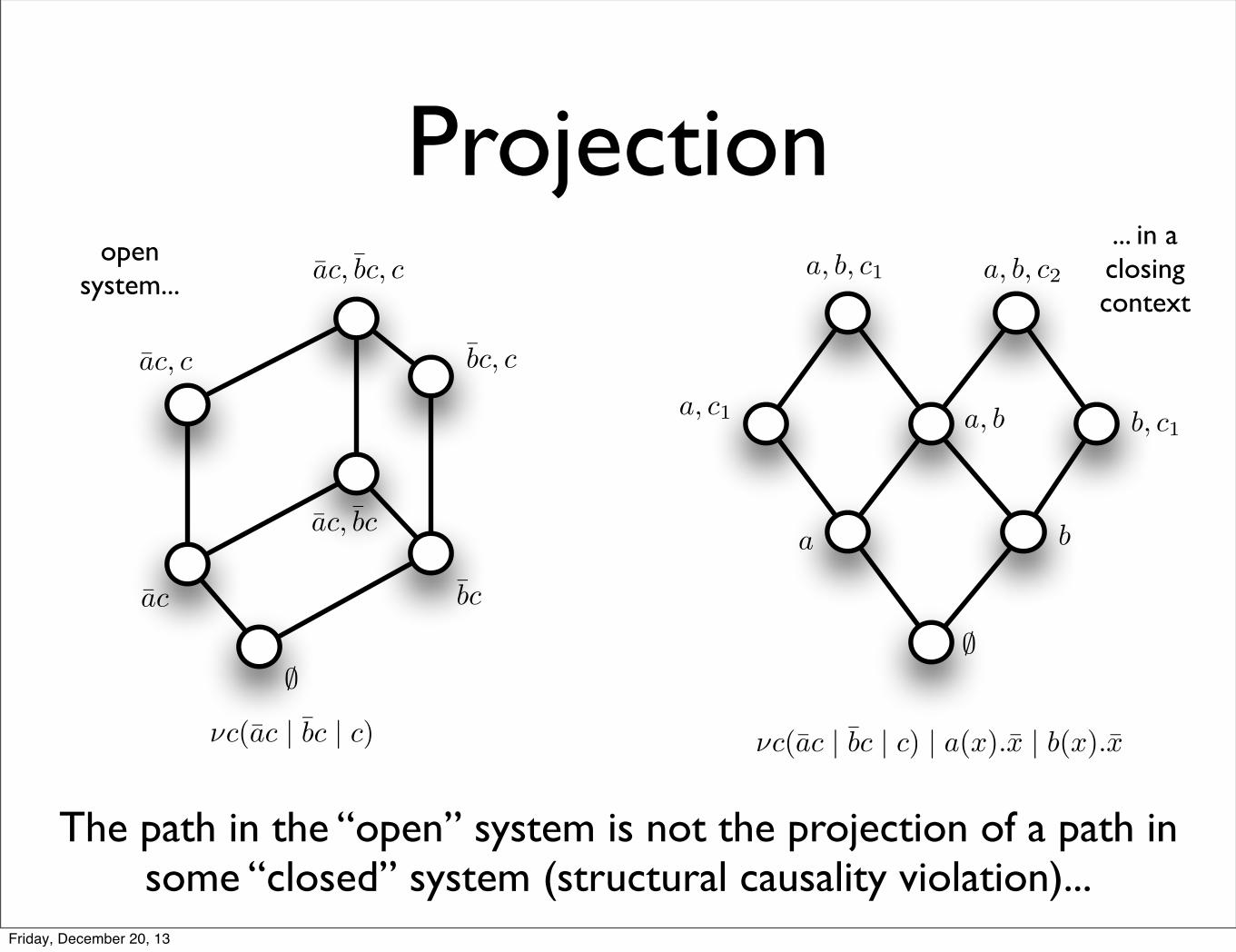
Projection
;
a b
a, c1 b, c1a, b
a, b, c1 a, b, c2
⌫c(ac | bc | c) | a(x).x | b(x).x
;
ac bc
ac, c bc, c
ac, bc
ac, bc, c
⌫c(ac | bc | c)
The path in the “open” system is not the projection of a path in some “closed” system (structural causality violation)...
opensystem...
... in a closing context
Friday, December 20, 13
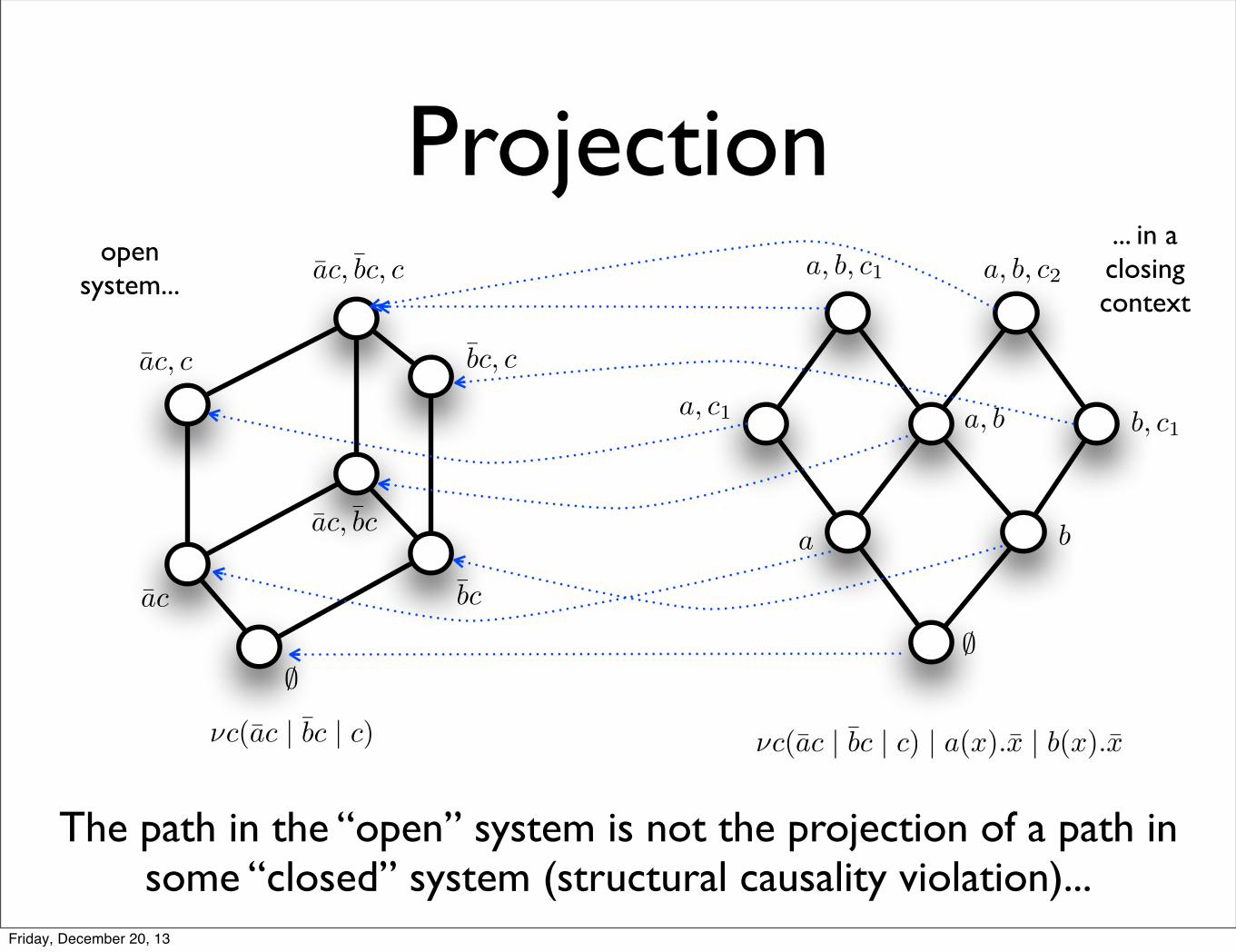
Projection
;
a b
a, c1 b, c1a, b
a, b, c1 a, b, c2
⌫c(ac | bc | c) | a(x).x | b(x).x
;
ac bc
ac, c bc, c
ac, bc
ac, bc, c
⌫c(ac | bc | c)
The path in the “open” system is not the projection of a path in some “closed” system (structural causality violation)...
opensystem...
... in a closing context
Friday, December 20, 13
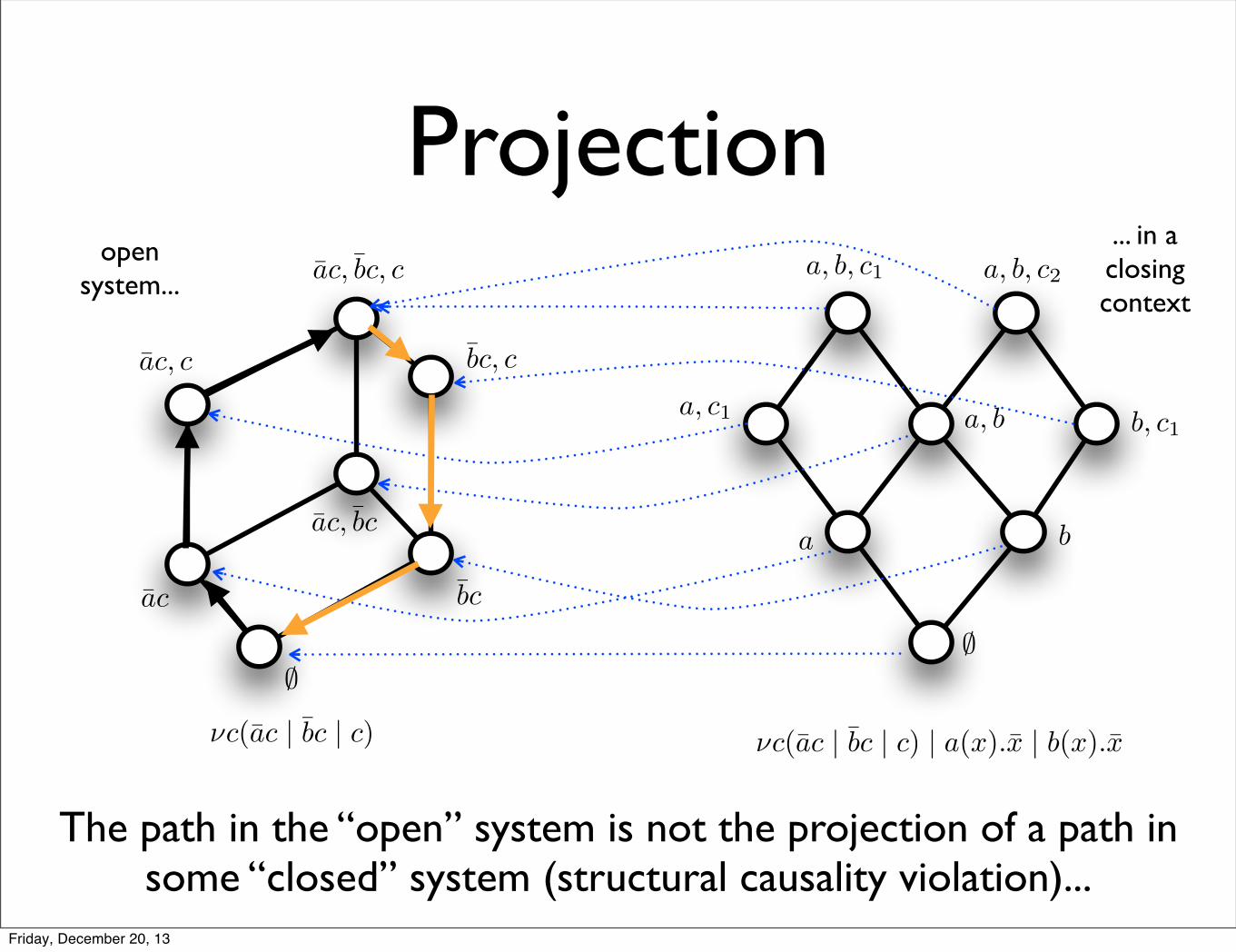
Projection
;
a b
a, c1 b, c1a, b
a, b, c1 a, b, c2
⌫c(ac | bc | c) | a(x).x | b(x).x
;
ac bc
ac, c bc, c
ac, bc
ac, bc, c
⌫c(ac | bc | c)
The path in the “open” system is not the projection of a path in some “closed” system (structural causality violation)...
opensystem...
... in a closing context
Friday, December 20, 13
Projection
;
a b
a, c1 b, c1a, b
a, b, c1 a, b, c2
⌫c(ac | bc | c) | a(x).x | b(x).x
;
ac bc
ac, c bc, c
ac, bc
ac, bc, c
⌫c(ac | bc | c)
The path in the “open” system is not the projection of a path in some “closed” system (structural causality violation)...
opensystem...
... in a closing context
Friday, December 20, 13
What we need to do
;
ac bc
ac, c bc, c
ac, bc
ac, bc, c
⌫c(ac | bc | c)
c
ac | bc | c
;
ac bc
ac, c bc, c
ac, bc
ac, bc, c
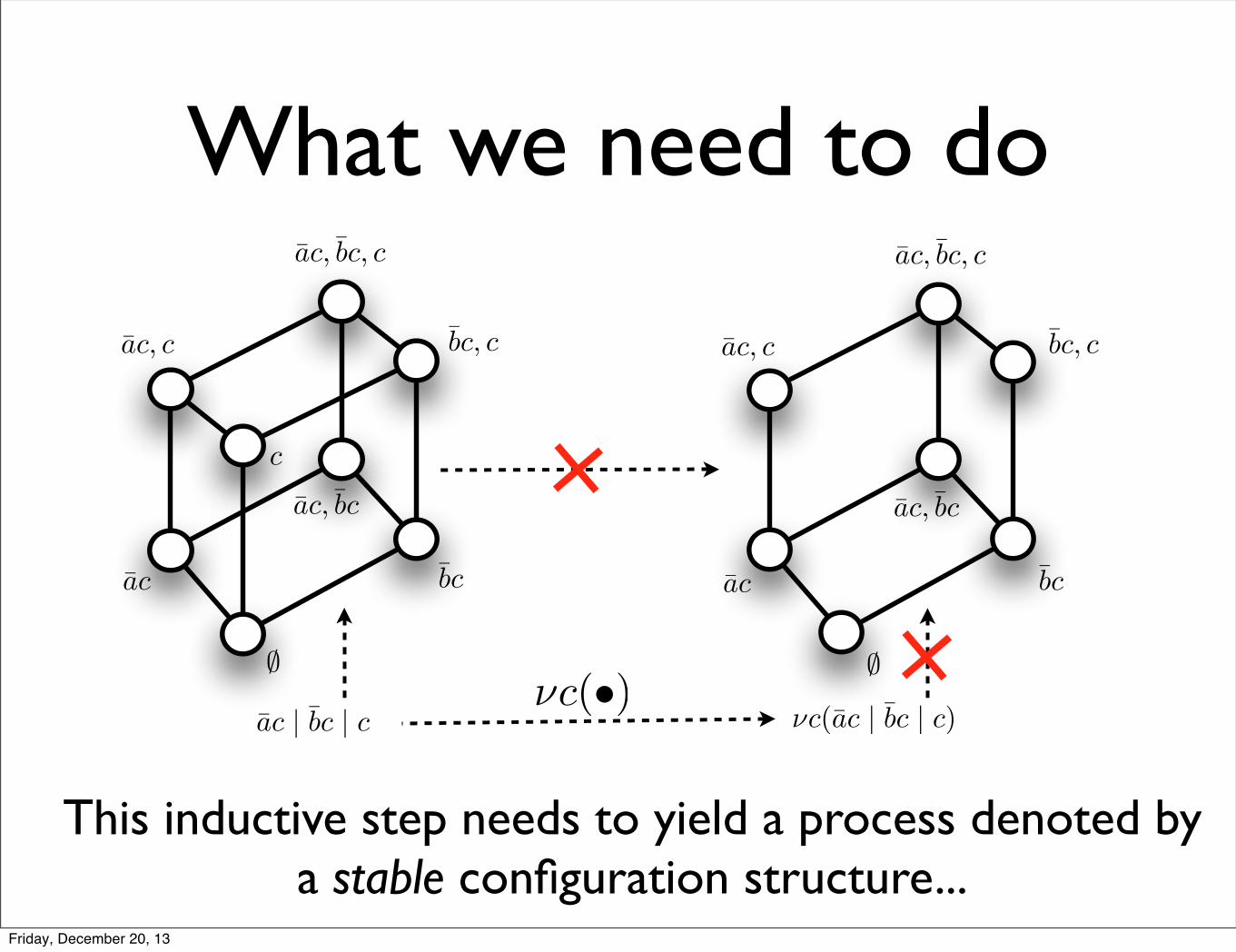
This inductive step needs to yield a process denoted by a stable configuration structure...
⌫c(•)
Friday, December 20, 13
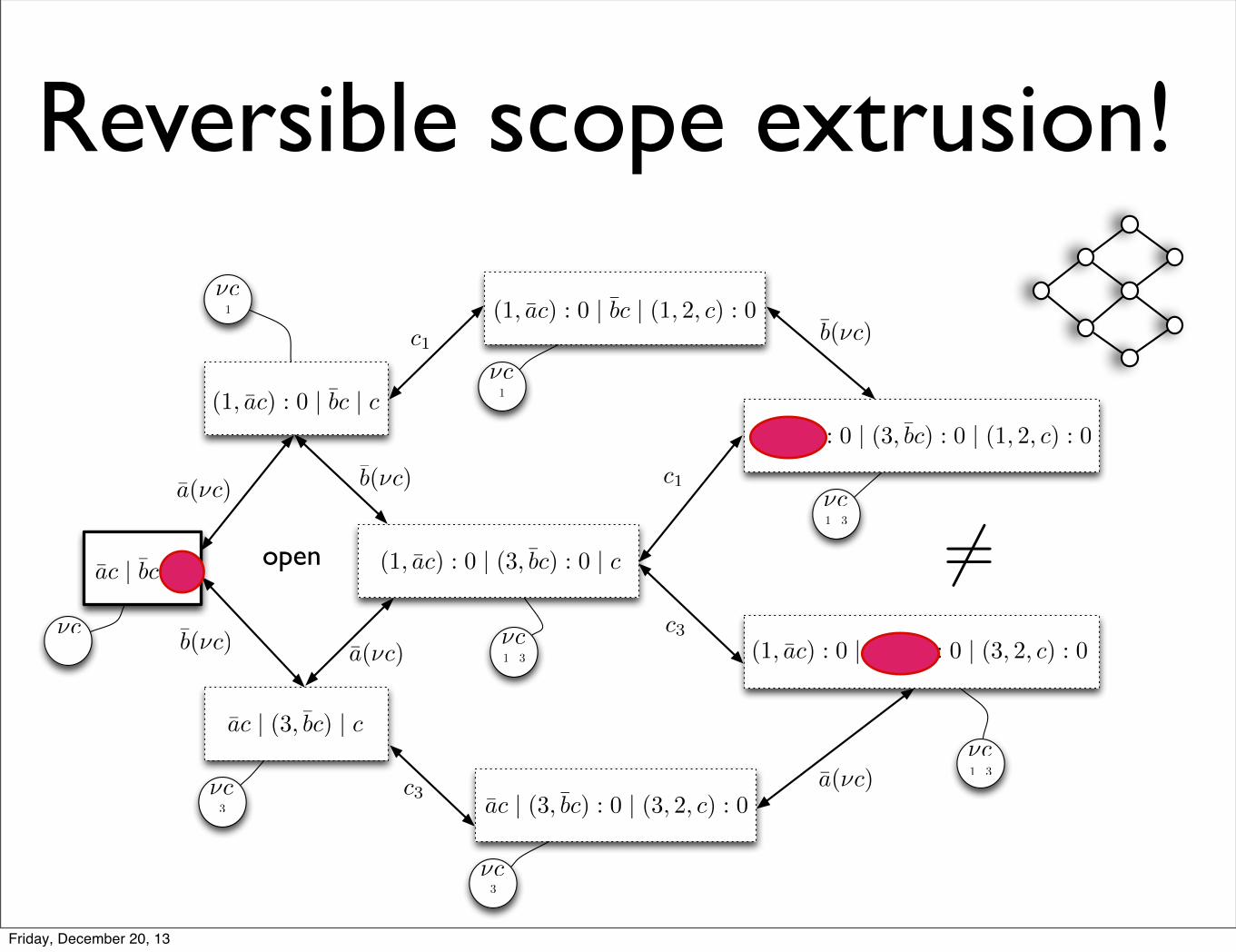
Reversible scope extrusion!
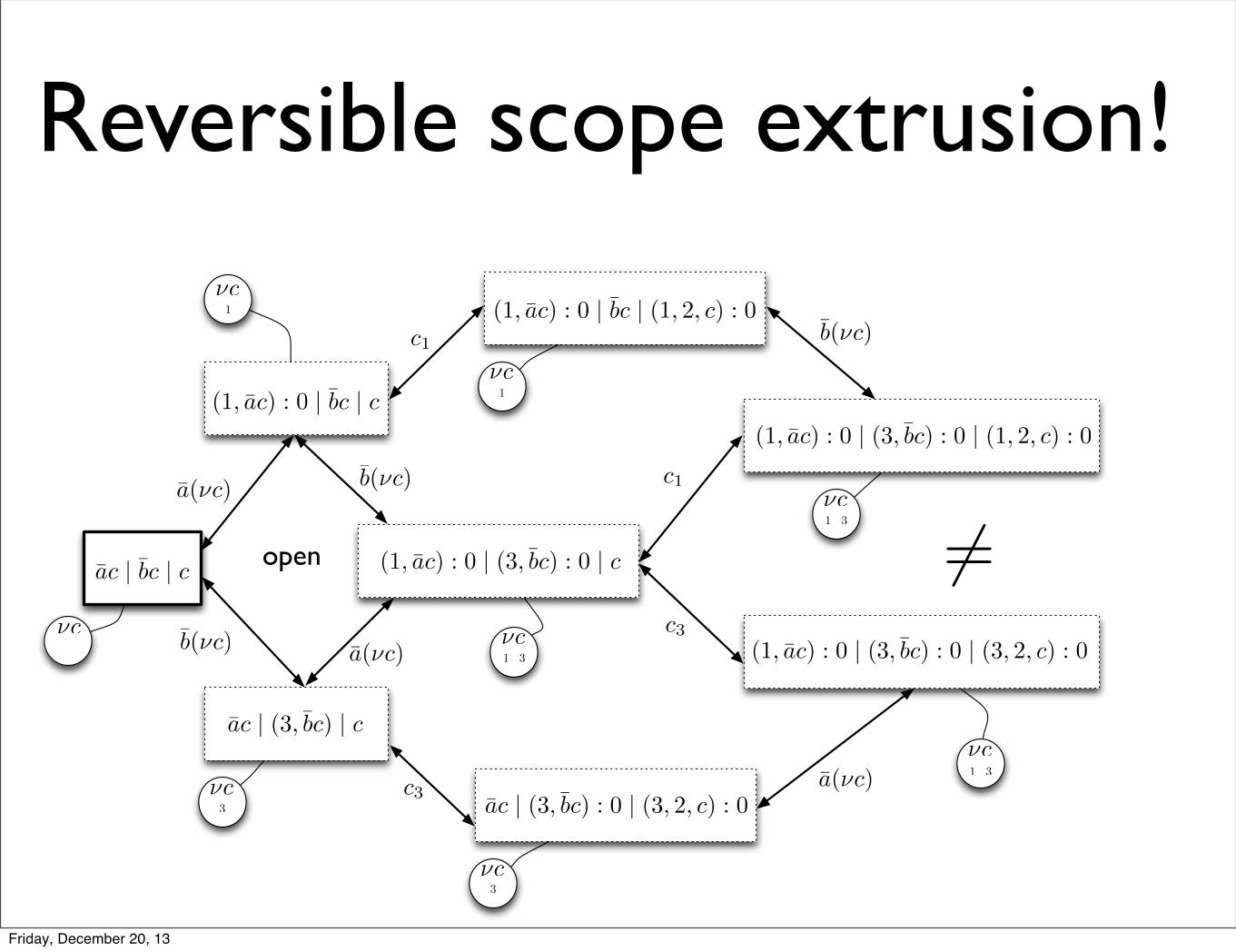
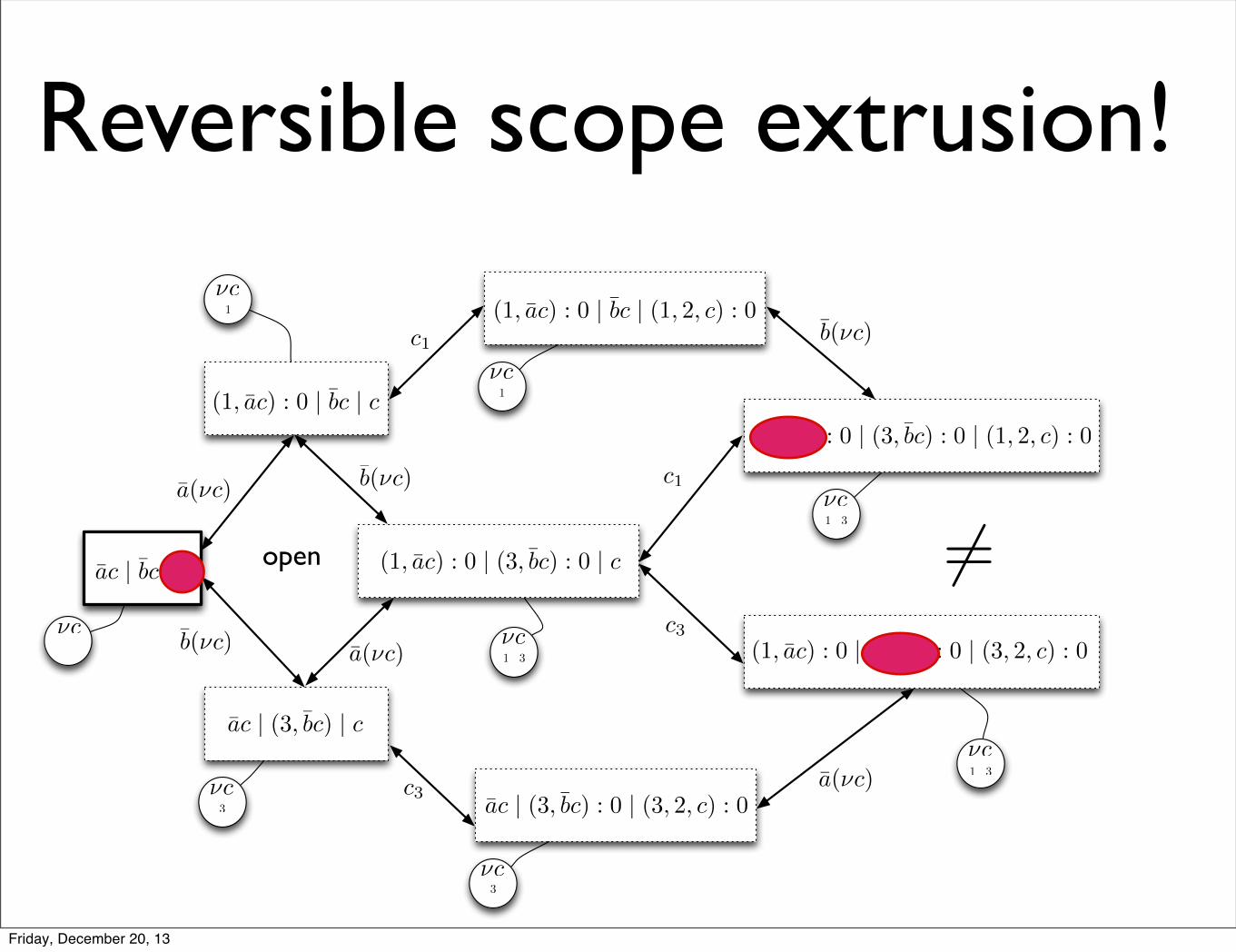
open 6=ac | bc | c
⌫c
⌫c
(1, ac) : 0 | bc | c
1
⌫c1
⌫c1
(1, ac) : 0 | (3, bc) : 0 | c
3
⌫c
ac | (3, bc) | c
3
(1, ac) : 0 | bc | (1, 2, c) : 0
⌫c
ac | (3, bc) : 0 | (3, 2, c) : 0
⌫c
⌫c1 3
1 3
(1, ac) : 0 | (3, bc) : 0 | (1, 2, c) : 0
(1, ac) : 0 | (3, bc) : 0 | (3, 2, c) : 0
a(⌫c)
b(⌫c)
b(⌫c)
a(⌫c)
c1
3
c3
b(⌫c)
c1
c3
a(⌫c)
Friday, December 20, 13
Reversible scope extrusion!
open 6=ac | bc | c
⌫c
⌫c
(1, ac) : 0 | bc | c
1
⌫c1
⌫c1
(1, ac) : 0 | (3, bc) : 0 | c
3
⌫c
ac | (3, bc) | c
3
(1, ac) : 0 | bc | (1, 2, c) : 0
⌫c
ac | (3, bc) : 0 | (3, 2, c) : 0
⌫c
⌫c1 3
1 3
(1, ac) : 0 | (3, bc) : 0 | (1, 2, c) : 0
(1, ac) : 0 | (3, bc) : 0 | (3, 2, c) : 0
a(⌫c)
b(⌫c)
b(⌫c)
a(⌫c)
c1
3
c3
b(⌫c)
c1
c3
a(⌫c)
Friday, December 20, 13
Reversible scope extrusion!
open 6=ac | bc | c
⌫c
⌫c
(1, ac) : 0 | bc | c
1
⌫c1
⌫c1
(1, ac) : 0 | (3, bc) : 0 | c
3
⌫c
ac | (3, bc) | c
3
(1, ac) : 0 | bc | (1, 2, c) : 0
⌫c
ac | (3, bc) : 0 | (3, 2, c) : 0
⌫c
⌫c1 3
1 3
(1, ac) : 0 | (3, bc) : 0 | (1, 2, c) : 0
(1, ac) : 0 | (3, bc) : 0 | (3, 2, c) : 0
a(⌫c)
b(⌫c)
b(⌫c)
a(⌫c)
c1
3
c3
b(⌫c)
c1
c3
a(⌫c)
Friday, December 20, 13
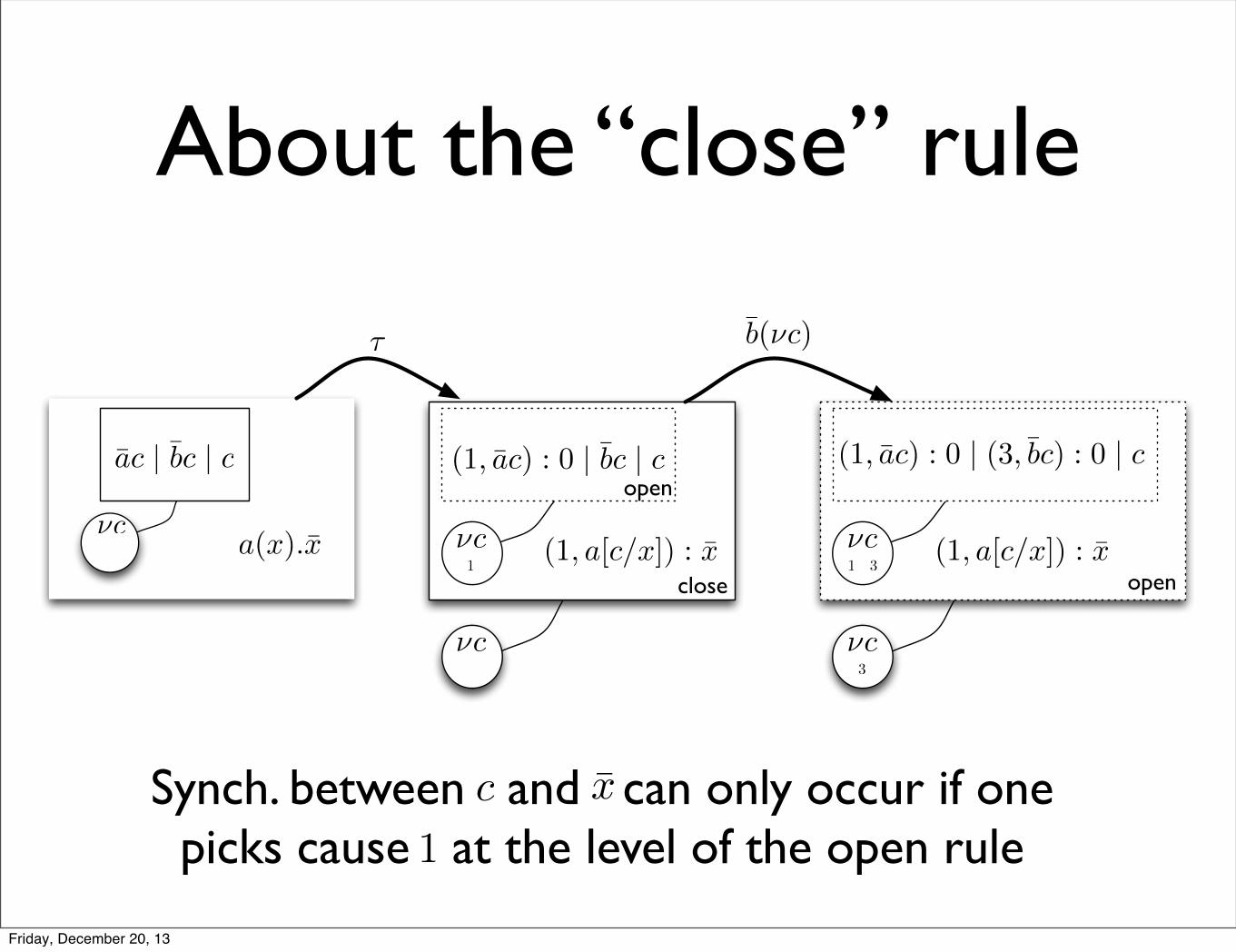
About the “close” rule
ac | bc | c
a(x).x
(1, ac) : 0 | bc | c
�c1
(1, a[c/x]) : x
�c
�c1
(1, a[c/x]) : x
�c
(1, ac) : 0 | (3, bc) : 0 | c
3
3
⌧ b(�c)
Synch. between and can only occur if one picks cause at the level of the open rule
c x
1
open
close open
⌫c
Friday, December 20, 13
The Reversible LTS...B. Dynamics
1) Transitions and transition labels: The label ⇤ of atransition t : R
��⇤ S is a quadruple of the form (i, j, k) : ⇥where i ⇧ I � {⇥} is the identifier of t, j ⇧ I is theinstantiator of i and k ⇧ I is the contextual cause of i.The labels ⇥ are built on the following grammar:
⇥ ::= � | ��
� ::= b(c) | b⌦a↵ | b(�a�)
where b(�a�) corresponds to the bound output of the ⌅calculus, whenever � = ⌃, and otherwise corresponds toa free output, decorated with a set of event identifiers.
For all label ⇥ of the form � or ��, we write subj (⇥) = bif � ⇧ {b(c), b⌦a↵, b(�a�)} for some a. We also writebn(⇥) = {a} whenever � = b⌦�a� ⇤=⌅↵ for some b. Atransition is positive whenever its label is of the form �,and negative if the label is of the form ��. It is derivableif it can be obtained form the LTS presented in the nextsection.
As we already hinted at, R⌅ substitutions are not executeddirectly but simply logged in event labels. As a consequence,processes need to search in their memories for the publicname of a channel in order to check that a synchronizationis possible. Such operation is performed only on demand,when a process is trying to reduce its prefix (see IN+ andOUT+ axioms in Section II-B2).
Definition 2.3 (Public label): For all process of the formm � ⌅.P let m[⌅] be the public label of ⌅. It is defined bylexicographical induction on the pair (⌅,m):
⇧[a] = am[b(c)] = m[b](c)m[b⌦a↵] = m[b]⌦m[a]↵(⌦i, k, b[c/a]↵.m)[a] = c(⌦i, k, b[ /a]↵.m)[a] = a(⌦⌅↵.m)[a] = m[a](e.m)[a] = m[a] otherwise
2) The labelled transition system (LTS): The labelledtransition system of R⌅ can be divided into positive andnegative rules. The negative ones are derived from thepositive ones by inversion (see Definition 2.4). The positive
rules are:
IN+i /⇧ m j = instm(b)
m � b(c).P(i,j,�):m[b(c)]���������⌅ ↵i, ⇥, b[⌥/c]�.m � P
OUT+i /⇧ m j = instm(b)
m � b↵a�.P (i,j,�):m[b⇤a⌅]���������⌅ ↵i, ⇥, b↵a��.m � P
OPEN+R
(i,j,k):������⌅ R⇥ � = b↵a� ⌦ � = b↵�a�⇥�
�a�R(i,j,k):b⇤⌫a�⌅���������⌅ �a�+iR
⇥
CAUSE REF+R
(i,j,k):������⌅ R⇥ a ⇧ subj(�)
�a�R(i,j,k⇥):�������⌅ �a�R
⇥[k⇥/k]@i
k = k⇥or
⌥k⇥ ⇧ � k ⇥R k⇥
COM+
R(i,j,k):b⇤a⌅�������⌅ R⇥ S
(i,j⇥,k⇥):b(c)��������⌅ S⇥
R � S(i,�,�):⌅�����⌅ R⇥ � S⇥
[a/c]@i
k =� j⇥
k⇥ =� j
CLOSE+
R(i,j,k):b⇤⌫a�⌅���������⌅ R⇥ S
(i,j⇥,k⇥):b(c)��������⌅ S⇥
R � S(i,�,�):⌅�����⌅ �a�(R
⇥ � S⇥[a/c]@i)
k =� j⇥
k⇥ =� j
with a ⌃⇧ fn(S) whenever � = �
PAR+R
(i,j,k):������⌅ R⇥
R � S(i,j,k):������⌅ R⇥ � S
bn(�) fn(S) = �, i /⇧ S
MEM+R ⇤m S
⇤�⌅ S⇥ ⇤m R⇥
R⇤�⌅ R⇥
NEW+R
⇤�⌅ R⇥
⇤a�R⇤�⌅ ⇤a�R
⇥a /⇧ ⇥
with for all i, j ⇧ I , i =⇥ j if ⇥ ⇧ {i, j} or i = j.
Note that the complete positive LTS contains also thesymmetrical rules for the COM+, CLOSE+ and PAR+ ruleswith respect to the � operator. For lack of space, we do notwrite them explicitly.
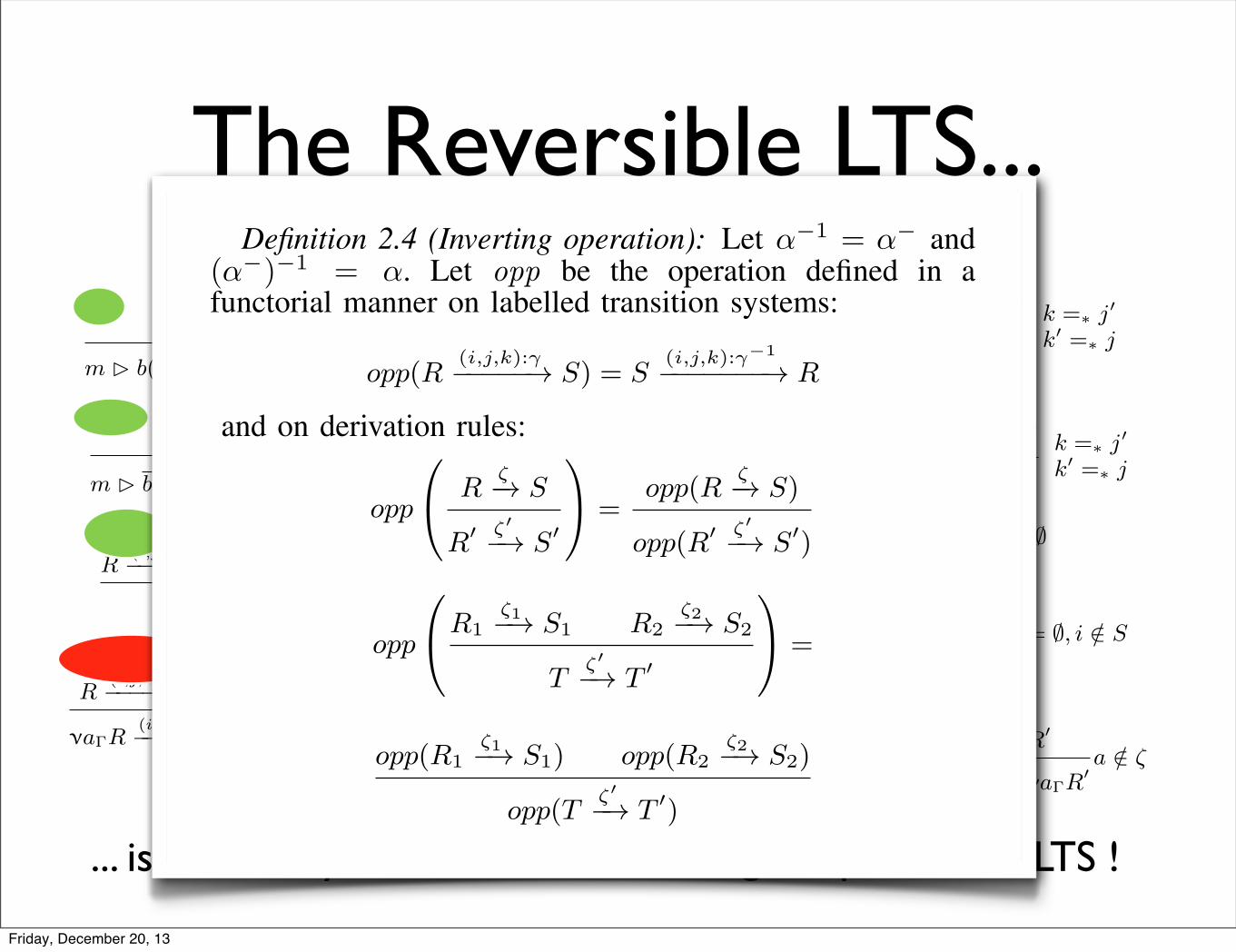
The backward rules are derived according to the followingdefinition:
Definition 2.4 (Inverting operation): Let ��1 = �� and(��)�1 = �. Let opp be the operation defined in afunctorial manner on labeled transition systems as:
opp(R(i,j,k):⇥�����⌅ S) = S
(i,j,k):⇥�1
�������⌅ R
B. Dynamics
1) Transitions and transition labels: The label ⇤ of atransition t : R
��⇤ S is a quadruple of the form (i, j, k) : ⇥where i ⇧ I � {⇥} is the identifier of t, j ⇧ I is theinstantiator of i and k ⇧ I is the contextual cause of i.The labels ⇥ are built on the following grammar:
⇥ ::= � | ��
� ::= b(c) | b⌦a↵ | b(�a�)
where b(�a�) corresponds to the bound output of the ⌅calculus, whenever � = ⌃, and otherwise corresponds toa free output, decorated with a set of event identifiers.
For all label ⇥ of the form � or ��, we write subj (⇥) = bif � ⇧ {b(c), b⌦a↵, b(�a�)} for some a. We also writebn(⇥) = {a} whenever � = b⌦�a� ⇤=⌅↵ for some b. Atransition is positive whenever its label is of the form �,and negative if the label is of the form ��. It is derivableif it can be obtained form the LTS presented in the nextsection.
As we already hinted at, R⌅ substitutions are not executeddirectly but simply logged in event labels. As a consequence,processes need to search in their memories for the publicname of a channel in order to check that a synchronizationis possible. Such operation is performed only on demand,when a process is trying to reduce its prefix (see IN+ andOUT+ axioms in Section II-B2).
Definition 2.3 (Public label): For all process of the formm � ⌅.P let m[⌅] be the public label of ⌅. It is defined bylexicographical induction on the pair (⌅,m):
⇧[a] = am[b(c)] = m[b](c)m[b⌦a↵] = m[b]⌦m[a]↵(⌦i, k, b[c/a]↵.m)[a] = c(⌦i, k, b[ /a]↵.m)[a] = a(⌦⌅↵.m)[a] = m[a](e.m)[a] = m[a] otherwise
2) The labelled transition system (LTS): The labelledtransition system of R⌅ can be divided into positive andnegative rules. The negative ones are derived from thepositive ones by inversion (see Definition 2.4). The positive
rules are:
IN+i /⇧ m j = instm(b)
m � b(c).P(i,j,�):m[b(c)]���������⌅ ↵i, ⇥, b[⌥/c]�.m � P
OUT+i /⇧ m j = instm(b)
m � b↵a�.P (i,j,�):m[b⇤a⌅]���������⌅ ↵i, ⇥, b↵a��.m � P
OPEN+R
(i,j,k):������⌅ R⇥ � = b↵a� ⌦ � = b↵�a�⇥�
�a�R(i,j,k):b⇤⌫a�⌅���������⌅ �a�+iR
⇥
CAUSE REF+R
(i,j,k):������⌅ R⇥ a ⇧ subj(�)
�a�R(i,j,k⇥):�������⌅ �a�R
⇥[k⇥/k]@i
k = k⇥or
⌥k⇥ ⇧ � k ⇥R k⇥
COM+
R(i,j,k):b⇤a⌅�������⌅ R⇥ S
(i,j⇥,k⇥):b(c)��������⌅ S⇥
R � S(i,�,�):⌅�����⌅ R⇥ � S⇥
[a/c]@i
k =� j⇥
k⇥ =� j
CLOSE+
R(i,j,k):b⇤⌫a�⌅���������⌅ R⇥ S
(i,j⇥,k⇥):b(c)��������⌅ S⇥
R � S(i,�,�):⌅�����⌅ �a�(R
⇥ � S⇥[a/c]@i)
k =� j⇥
k⇥ =� j
with a ⌃⇧ fn(S) whenever � = �
PAR+R
(i,j,k):������⌅ R⇥
R � S(i,j,k):������⌅ R⇥ � S
bn(�) fn(S) = �, i /⇧ S
MEM+R ⇤m S
⇤�⌅ S⇥ ⇤m R⇥
R⇤�⌅ R⇥
NEW+R
⇤�⌅ R⇥
⇤a�R⇤�⌅ ⇤a�R
⇥a /⇧ ⇥
with for all i, j ⇧ I , i =⇥ j if ⇥ ⇧ {i, j} or i = j.
Note that the complete positive LTS contains also thesymmetrical rules for the COM+, CLOSE+ and PAR+ ruleswith respect to the � operator. For lack of space, we do notwrite them explicitly.
The backward rules are derived according to the followingdefinition:
Definition 2.4 (Inverting operation): Let ��1 = �� and(��)�1 = �. Let opp be the operation defined in afunctorial manner on labeled transition systems as:
opp(R(i,j,k):⇥�����⌅ S) = S
(i,j,k):⇥�1
�������⌅ R
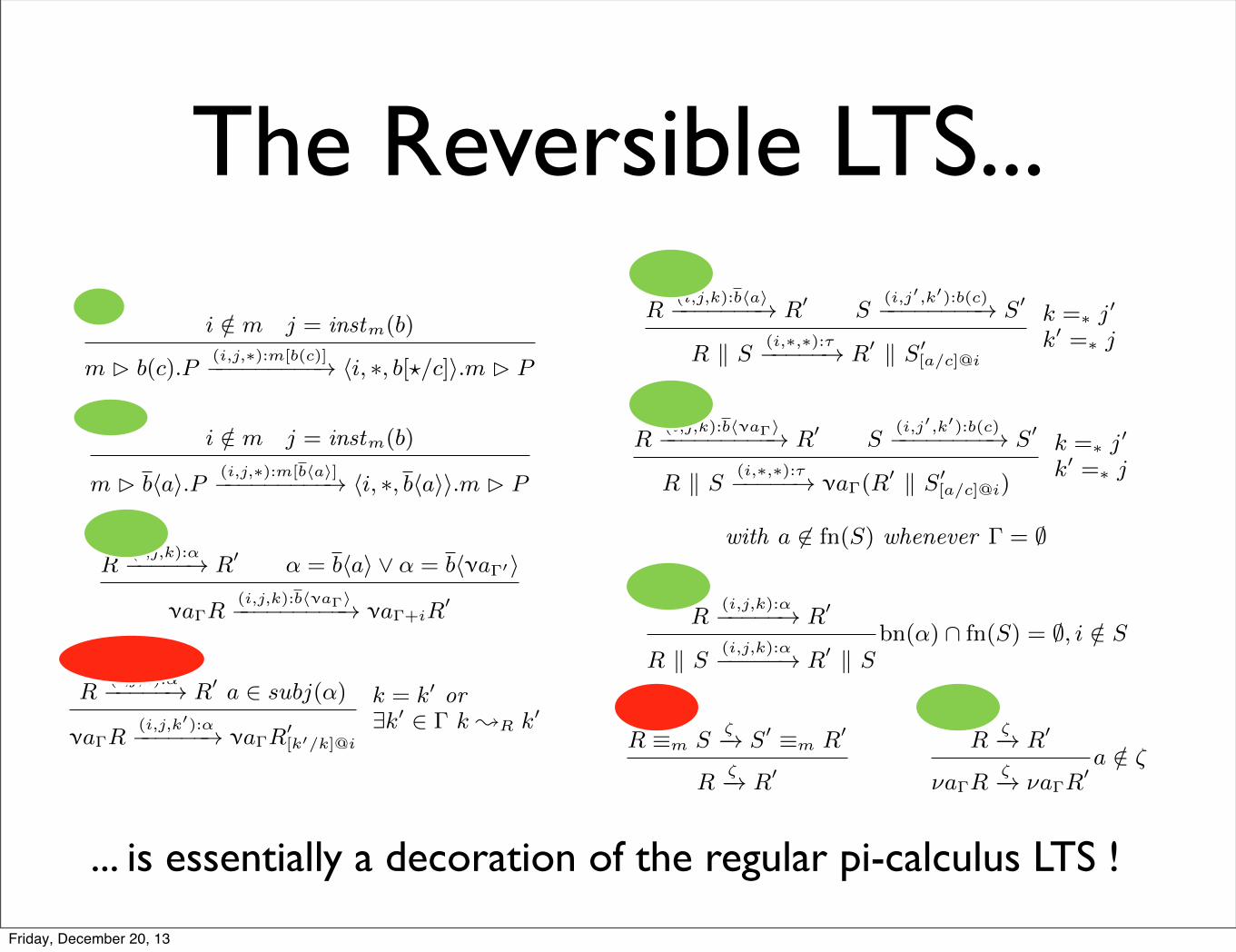
... is essentially a decoration of the regular pi-calculus LTS !
Friday, December 20, 13
The Reversible LTS...B. Dynamics
1) Transitions and transition labels: The label ⇤ of atransition t : R
��⇤ S is a quadruple of the form (i, j, k) : ⇥where i ⇧ I � {⇥} is the identifier of t, j ⇧ I is theinstantiator of i and k ⇧ I is the contextual cause of i.The labels ⇥ are built on the following grammar:
⇥ ::= � | ��
� ::= b(c) | b⌦a↵ | b(�a�)
where b(�a�) corresponds to the bound output of the ⌅calculus, whenever � = ⌃, and otherwise corresponds toa free output, decorated with a set of event identifiers.
For all label ⇥ of the form � or ��, we write subj (⇥) = bif � ⇧ {b(c), b⌦a↵, b(�a�)} for some a. We also writebn(⇥) = {a} whenever � = b⌦�a� ⇤=⌅↵ for some b. Atransition is positive whenever its label is of the form �,and negative if the label is of the form ��. It is derivableif it can be obtained form the LTS presented in the nextsection.
As we already hinted at, R⌅ substitutions are not executeddirectly but simply logged in event labels. As a consequence,processes need to search in their memories for the publicname of a channel in order to check that a synchronizationis possible. Such operation is performed only on demand,when a process is trying to reduce its prefix (see IN+ andOUT+ axioms in Section II-B2).
Definition 2.3 (Public label): For all process of the formm � ⌅.P let m[⌅] be the public label of ⌅. It is defined bylexicographical induction on the pair (⌅,m):
⇧[a] = am[b(c)] = m[b](c)m[b⌦a↵] = m[b]⌦m[a]↵(⌦i, k, b[c/a]↵.m)[a] = c(⌦i, k, b[ /a]↵.m)[a] = a(⌦⌅↵.m)[a] = m[a](e.m)[a] = m[a] otherwise
2) The labelled transition system (LTS): The labelledtransition system of R⌅ can be divided into positive andnegative rules. The negative ones are derived from thepositive ones by inversion (see Definition 2.4). The positive
rules are:
IN+i /⇧ m j = instm(b)
m � b(c).P(i,j,�):m[b(c)]���������⌅ ↵i, ⇥, b[⌥/c]�.m � P
OUT+i /⇧ m j = instm(b)
m � b↵a�.P (i,j,�):m[b⇤a⌅]���������⌅ ↵i, ⇥, b↵a��.m � P
OPEN+R
(i,j,k):������⌅ R⇥ � = b↵a� ⌦ � = b↵�a�⇥�
�a�R(i,j,k):b⇤⌫a�⌅���������⌅ �a�+iR
⇥
CAUSE REF+R
(i,j,k):������⌅ R⇥ a ⇧ subj(�)
�a�R(i,j,k⇥):�������⌅ �a�R
⇥[k⇥/k]@i
k = k⇥or
⌥k⇥ ⇧ � k ⇥R k⇥
COM+
R(i,j,k):b⇤a⌅�������⌅ R⇥ S
(i,j⇥,k⇥):b(c)��������⌅ S⇥
R � S(i,�,�):⌅�����⌅ R⇥ � S⇥
[a/c]@i
k =� j⇥
k⇥ =� j
CLOSE+
R(i,j,k):b⇤⌫a�⌅���������⌅ R⇥ S
(i,j⇥,k⇥):b(c)��������⌅ S⇥
R � S(i,�,�):⌅�����⌅ �a�(R
⇥ � S⇥[a/c]@i)
k =� j⇥
k⇥ =� j
with a ⌃⇧ fn(S) whenever � = �
PAR+R
(i,j,k):������⌅ R⇥
R � S(i,j,k):������⌅ R⇥ � S
bn(�) fn(S) = �, i /⇧ S
MEM+R ⇤m S
⇤�⌅ S⇥ ⇤m R⇥
R⇤�⌅ R⇥
NEW+R
⇤�⌅ R⇥
⇤a�R⇤�⌅ ⇤a�R
⇥a /⇧ ⇥
with for all i, j ⇧ I , i =⇥ j if ⇥ ⇧ {i, j} or i = j.
Note that the complete positive LTS contains also thesymmetrical rules for the COM+, CLOSE+ and PAR+ ruleswith respect to the � operator. For lack of space, we do notwrite them explicitly.
The backward rules are derived according to the followingdefinition:
Definition 2.4 (Inverting operation): Let ��1 = �� and(��)�1 = �. Let opp be the operation defined in afunctorial manner on labeled transition systems as:
opp(R(i,j,k):⇥�����⌅ S) = S
(i,j,k):⇥�1
�������⌅ R
B. Dynamics
1) Transitions and transition labels: The label ⇤ of atransition t : R
��⇤ S is a quadruple of the form (i, j, k) : ⇥where i ⇧ I � {⇥} is the identifier of t, j ⇧ I is theinstantiator of i and k ⇧ I is the contextual cause of i.The labels ⇥ are built on the following grammar:
⇥ ::= � | ��
� ::= b(c) | b⌦a↵ | b(�a�)
where b(�a�) corresponds to the bound output of the ⌅calculus, whenever � = ⌃, and otherwise corresponds toa free output, decorated with a set of event identifiers.
For all label ⇥ of the form � or ��, we write subj (⇥) = bif � ⇧ {b(c), b⌦a↵, b(�a�)} for some a. We also writebn(⇥) = {a} whenever � = b⌦�a� ⇤=⌅↵ for some b. Atransition is positive whenever its label is of the form �,and negative if the label is of the form ��. It is derivableif it can be obtained form the LTS presented in the nextsection.
As we already hinted at, R⌅ substitutions are not executeddirectly but simply logged in event labels. As a consequence,processes need to search in their memories for the publicname of a channel in order to check that a synchronizationis possible. Such operation is performed only on demand,when a process is trying to reduce its prefix (see IN+ andOUT+ axioms in Section II-B2).
Definition 2.3 (Public label): For all process of the formm � ⌅.P let m[⌅] be the public label of ⌅. It is defined bylexicographical induction on the pair (⌅,m):
⇧[a] = am[b(c)] = m[b](c)m[b⌦a↵] = m[b]⌦m[a]↵(⌦i, k, b[c/a]↵.m)[a] = c(⌦i, k, b[ /a]↵.m)[a] = a(⌦⌅↵.m)[a] = m[a](e.m)[a] = m[a] otherwise
2) The labelled transition system (LTS): The labelledtransition system of R⌅ can be divided into positive andnegative rules. The negative ones are derived from thepositive ones by inversion (see Definition 2.4). The positive
rules are:
IN+i /⇧ m j = instm(b)
m � b(c).P(i,j,�):m[b(c)]���������⌅ ↵i, ⇥, b[⌥/c]�.m � P
OUT+i /⇧ m j = instm(b)
m � b↵a�.P (i,j,�):m[b⇤a⌅]���������⌅ ↵i, ⇥, b↵a��.m � P
OPEN+R
(i,j,k):������⌅ R⇥ � = b↵a� ⌦ � = b↵�a�⇥�
�a�R(i,j,k):b⇤⌫a�⌅���������⌅ �a�+iR
⇥
CAUSE REF+R
(i,j,k):������⌅ R⇥ a ⇧ subj(�)
�a�R(i,j,k⇥):�������⌅ �a�R
⇥[k⇥/k]@i
k = k⇥or
⌥k⇥ ⇧ � k ⇥R k⇥
COM+
R(i,j,k):b⇤a⌅�������⌅ R⇥ S
(i,j⇥,k⇥):b(c)��������⌅ S⇥
R � S(i,�,�):⌅�����⌅ R⇥ � S⇥
[a/c]@i
k =� j⇥
k⇥ =� j
CLOSE+
R(i,j,k):b⇤⌫a�⌅���������⌅ R⇥ S
(i,j⇥,k⇥):b(c)��������⌅ S⇥
R � S(i,�,�):⌅�����⌅ �a�(R
⇥ � S⇥[a/c]@i)
k =� j⇥
k⇥ =� j
with a ⌃⇧ fn(S) whenever � = �
PAR+R
(i,j,k):������⌅ R⇥
R � S(i,j,k):������⌅ R⇥ � S
bn(�) fn(S) = �, i /⇧ S
MEM+R ⇤m S
⇤�⌅ S⇥ ⇤m R⇥
R⇤�⌅ R⇥
NEW+R
⇤�⌅ R⇥
⇤a�R⇤�⌅ ⇤a�R
⇥a /⇧ ⇥
with for all i, j ⇧ I , i =⇥ j if ⇥ ⇧ {i, j} or i = j.
Note that the complete positive LTS contains also thesymmetrical rules for the COM+, CLOSE+ and PAR+ ruleswith respect to the � operator. For lack of space, we do notwrite them explicitly.
The backward rules are derived according to the followingdefinition:
Definition 2.4 (Inverting operation): Let ��1 = �� and(��)�1 = �. Let opp be the operation defined in afunctorial manner on labeled transition systems as:
opp(R(i,j,k):⇥�����⌅ S) = S
(i,j,k):⇥�1
�������⌅ R
... is essentially a decoration of the regular pi-calculus LTS !
id(e) = id(e′), in which case (e, e′) forms a synchronisationpair.
B. Dynamics
1) Transitions and transition labels: The label ζ of atransition t : R
ζ−→ S is a quadruple of the form (i, j, k) : γwhere i ∈ I − {∗} is the identifier of t, j ∈ I is theinstantiator of i and k ∈ I is the contextual cause of i.The labels γ are built on the following grammar:
γ ::= α | α−α ::= b(c) | b〈a〉 | b(νaΓ)
where b(νaΓ) corresponds to the bound output of the π-calculus, whenever Γ = ∅, and otherwise corresponds to afree output, decorated with a set of event identifiers.
For all labels γ of the form α or α−, we write subj (γ) = bif α ∈ {b(c), b〈a〉, b(νaΓ)} for some a. We also writebn(γ) = {a} whenever α = b〈νaΓ#=∅〉 for some b. Atransition is positive whenever its label is of the form α,and negative if the label is of the form α−. It is derivableif it can be obtained from the LTS presented in the nextsection.
As we already hinted at, Rπ substitutions are not executeddirectly but simply logged in event labels. As a consequence,processes need to search in their memories for the publicname of a channel in order to check that a synchronisationis possible. Such operation is performed only on demand,when a process is trying to reduce its prefix (see IN+ andOUT+ axioms in Section II-B2).
Definition 2.3 (Public label): For all process of the formm ! π.P let m[π] be the public label of π. It is defined bylexicographical induction on the pair (π,m):
ε[a] = am[b(c)] = m[b](c)m[b〈a〉] = m[b]〈m[a]〉(〈i, k, b[c/a]〉.m)[a] = c(〈i, k, b[&/a]〉.m)[a] = a(〈↑〉.m)[a] = m[a](e.m)[a] = m[a] otherwise
2) The labelled transition system (LTS): The labelledtransition system of Rπ can be divided into positive andnegative rules. The negative ones are derived from thepositive ones by inversion (see Definition 2.4). The positiverules are presented in Table I, where for i, j ∈ I , i =∗ jmeans ∗ ∈ {i, j} or i = j.
Note that the complete positive LTS contains also thesymmetrical rules for the COM+, CLOSE+ and PAR+ ruleswith respect to the ‖ operator. For lack of space, we do notwrite them explicitly.
The backward rules are derived according to the followingdefinition:
IN+i /∈ m j = instm(b)
m ! b(c).P(i,j,∗):m[b(c)]−−−−−−−−−→ 〈i, ∗, b[!/c]〉.m ! P
OUT+i /∈ m j = instm(b)
m ! b〈a〉.P (i,j,∗):m[b〈a〉]−−−−−−−−−→ 〈i, ∗, b〈a〉〉.m ! P
OPEN+R
(i,j,k):α−−−−−→ R′ α = b〈a〉 ∨ α = b〈νaΓ′〉
νaΓR(i,j,k):b〈νaΓ〉−−−−−−−−−→ νaΓ+iR
′
CAUSE REF+R
(i,j,k):α−−−−−→ R′ a ∈ subj(α)
νaΓR(i,j,k′):α−−−−−−→ νaΓR
′[k′/k]@i
k = k′ or∃k′ ∈ Γ k "R k′
COM+
R(i,j,k):b〈a〉−−−−−−−→ R′ S
(i,j′,k′):b(c)−−−−−−−−→ S′
R ‖ S(i,∗,∗):τ−−−−−→ R′ ‖ S′[a/c]@i
k =∗ j′
k′ =∗ j
CLOSE+
R(i,j,k):b〈νaΓ〉−−−−−−−−−→ R′ S
(i,j′,k′):b(c)−−−−−−−−→ S′
R ‖ S(i,∗,∗):τ−−−−−→ νaΓ(R
′ ‖ S′[a/c]@i)
k =∗ j′
k′ =∗ j
with a *∈ fn(S) whenever Γ = ∅
PAR+R
(i,j,k):α−−−−−→ R′
R ‖ S(i,j,k):α−−−−−→ R′ ‖ S
bn(α) ∩ fn(S) = ∅, i /∈ S
MEM+R ≡m S
ζ−→ S′ ≡m R′
Rζ−→ R′
NEW+R
ζ−→ R′
νaΓRζ−→ νaΓR
′a /∈ ζ
Table ITHE POSITIVE RULES OF THE LTS
Definition 2.4 (Inverting operation): Let α−1 = α− and(α−)−1 = α. Let opp be the operation defined in afunctorial manner on labelled transition systems:
opp(R(i,j,k):γ−−−−−→ S) = S
(i,j,k):γ−1
−−−−−−−→ R
and on derivation rules:
opp
Rζ−→ S
R′ζ′−→ S′
=opp(R
ζ−→ S)
opp(R′ζ′−→ S′)
opp
R1ζ1−→ S1 R2
ζ2−→ S2
Tζ′−→ T ′
=
opp(R1ζ1−→ S1) opp(R2
ζ2−→ S2)
opp(Tζ′−→ T ′)
391Friday, December 20, 13
What we have seen (1/2)
Friday, December 20, 13
What we have seen (1/2)
P1
P2
eata1 b1
a2
b1
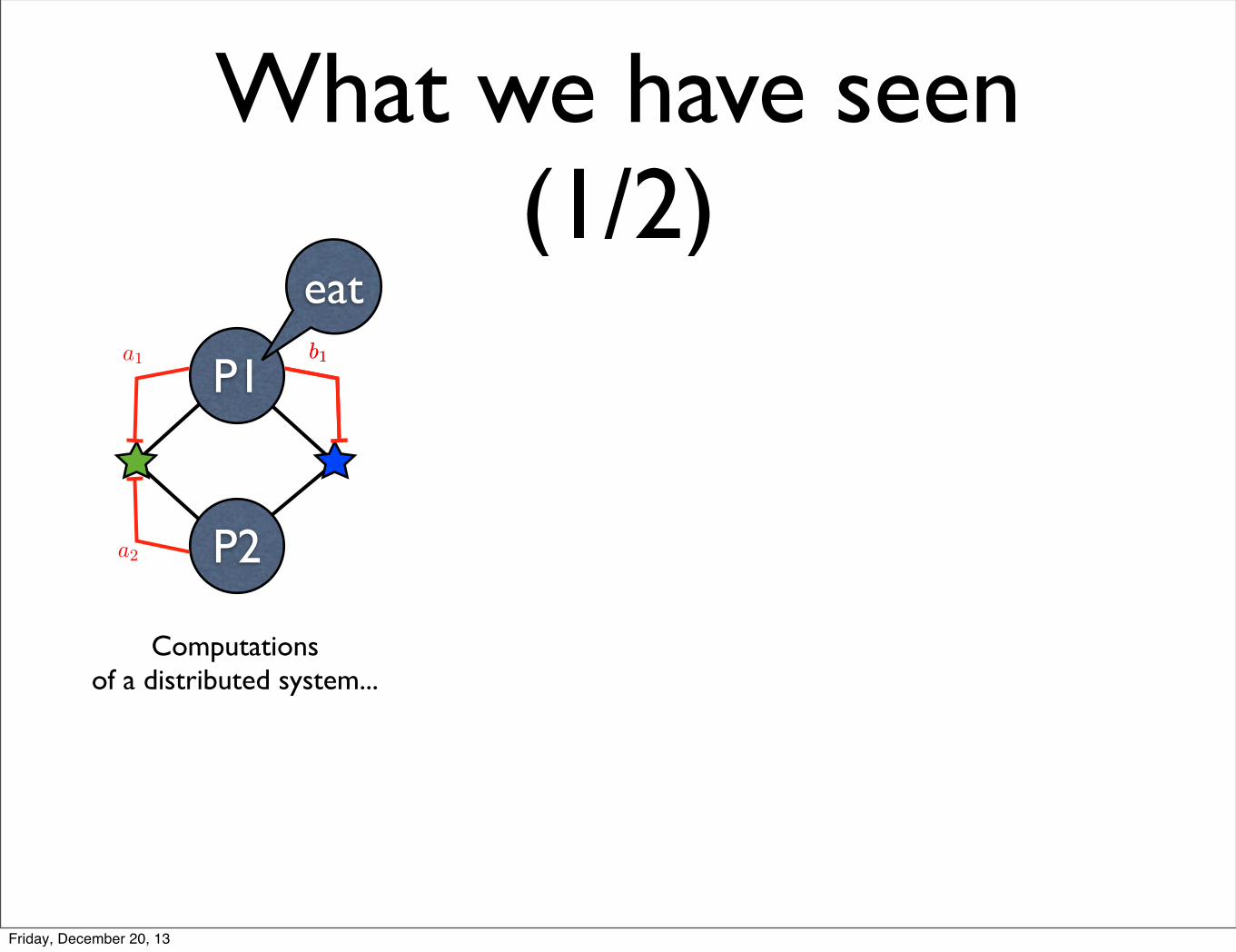
Computationsof a distributed system...
Friday, December 20, 13
What we have seen (1/2)
P1
P2
eata1 b1
a2
b1
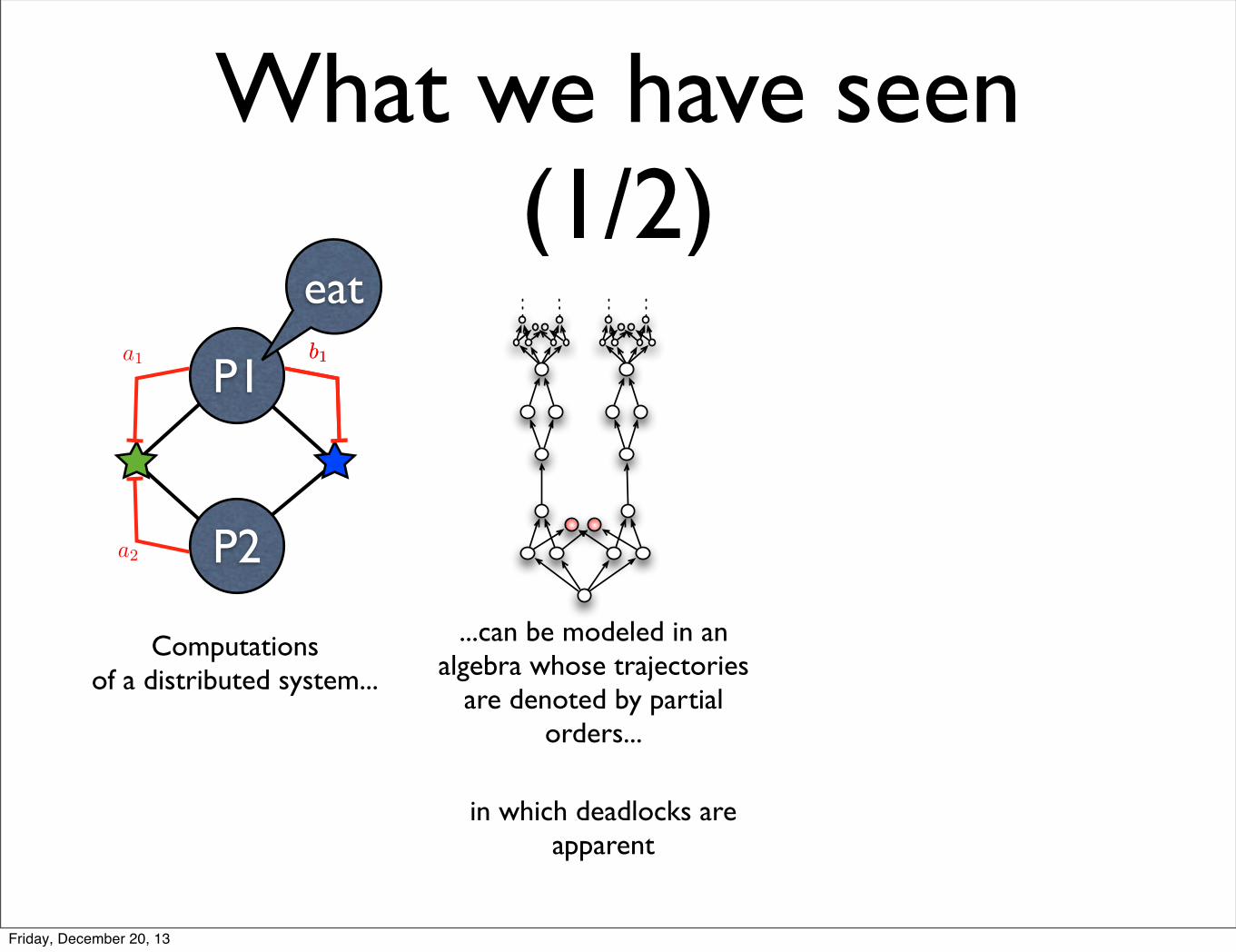
Computationsof a distributed system...
...can be modeled in an algebra whose trajectories
are denoted by partial orders...
in which deadlocks are apparent
Friday, December 20, 13
What we have seen (1/2)
P1
P2
eata1 b1
a2
b1
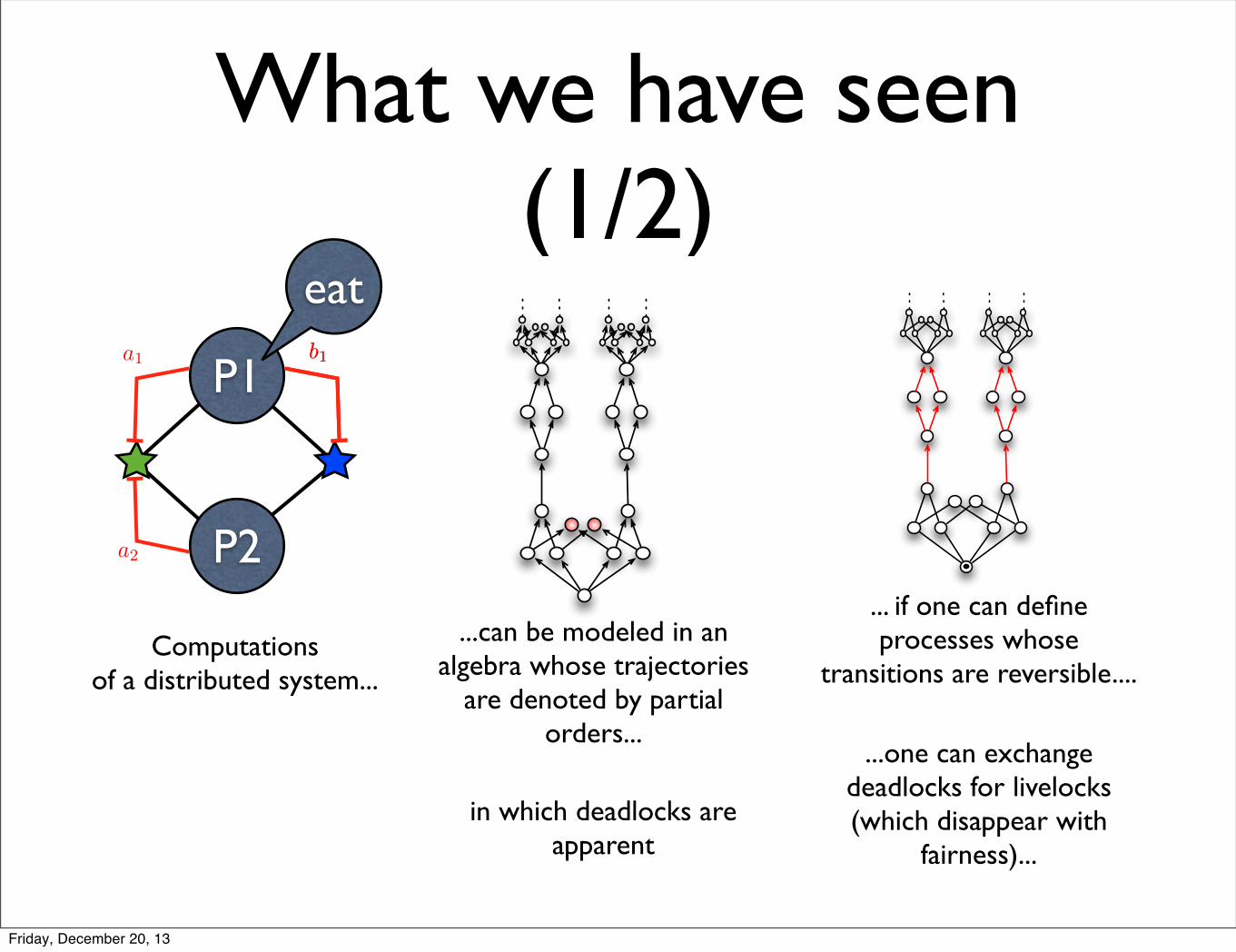
Computationsof a distributed system...
...can be modeled in an algebra whose trajectories
are denoted by partial orders...
in which deadlocks are apparent
... if one can define processes whose
transitions are reversible....
...one can exchange deadlocks for livelocks (which disappear with
fairness)...
Friday, December 20, 13
What we have seen (2/2)
Friday, December 20, 13
What we have seen (2/2)
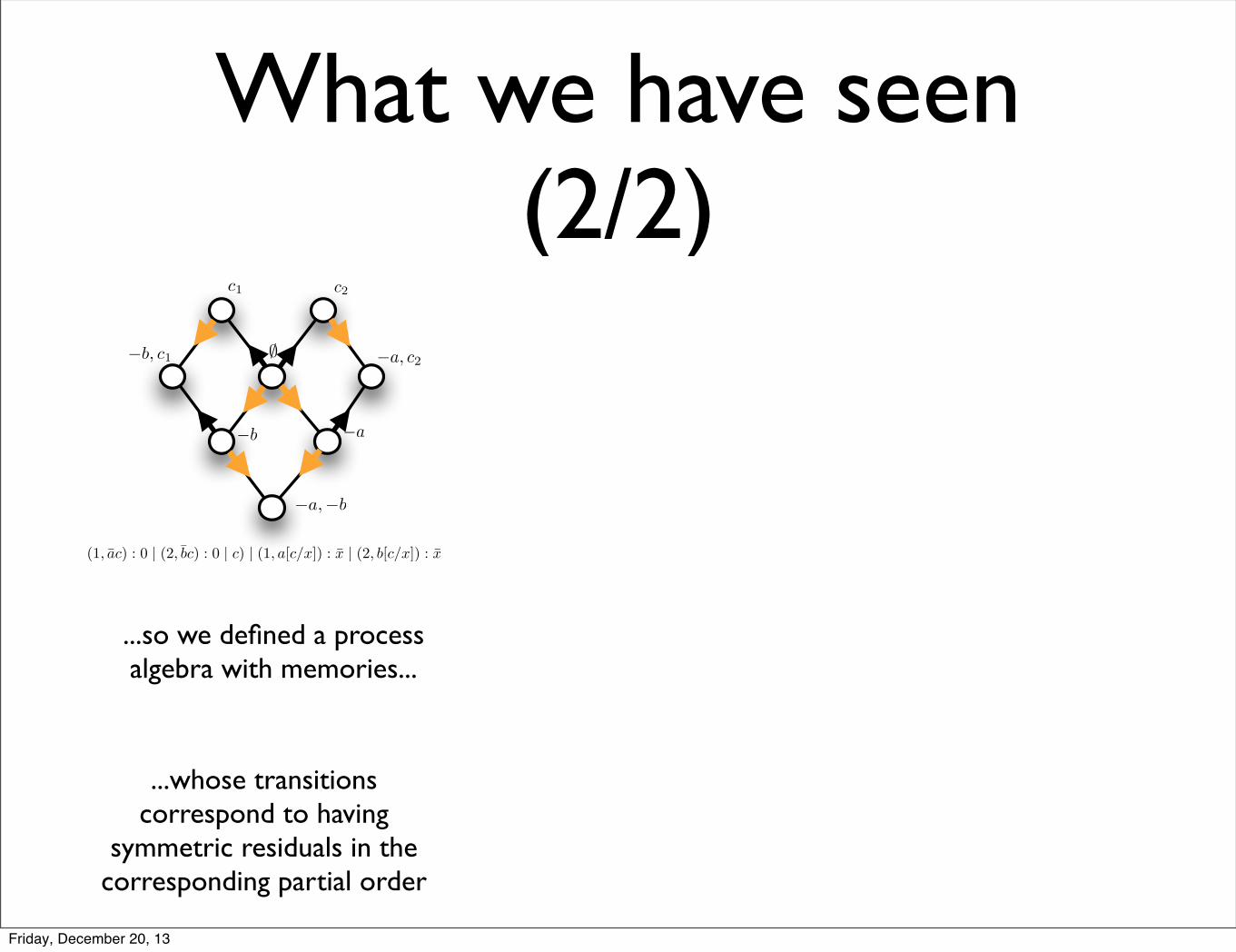
;
�b
c1 c2
�b, c1 �a, c2
�a
�a,�b
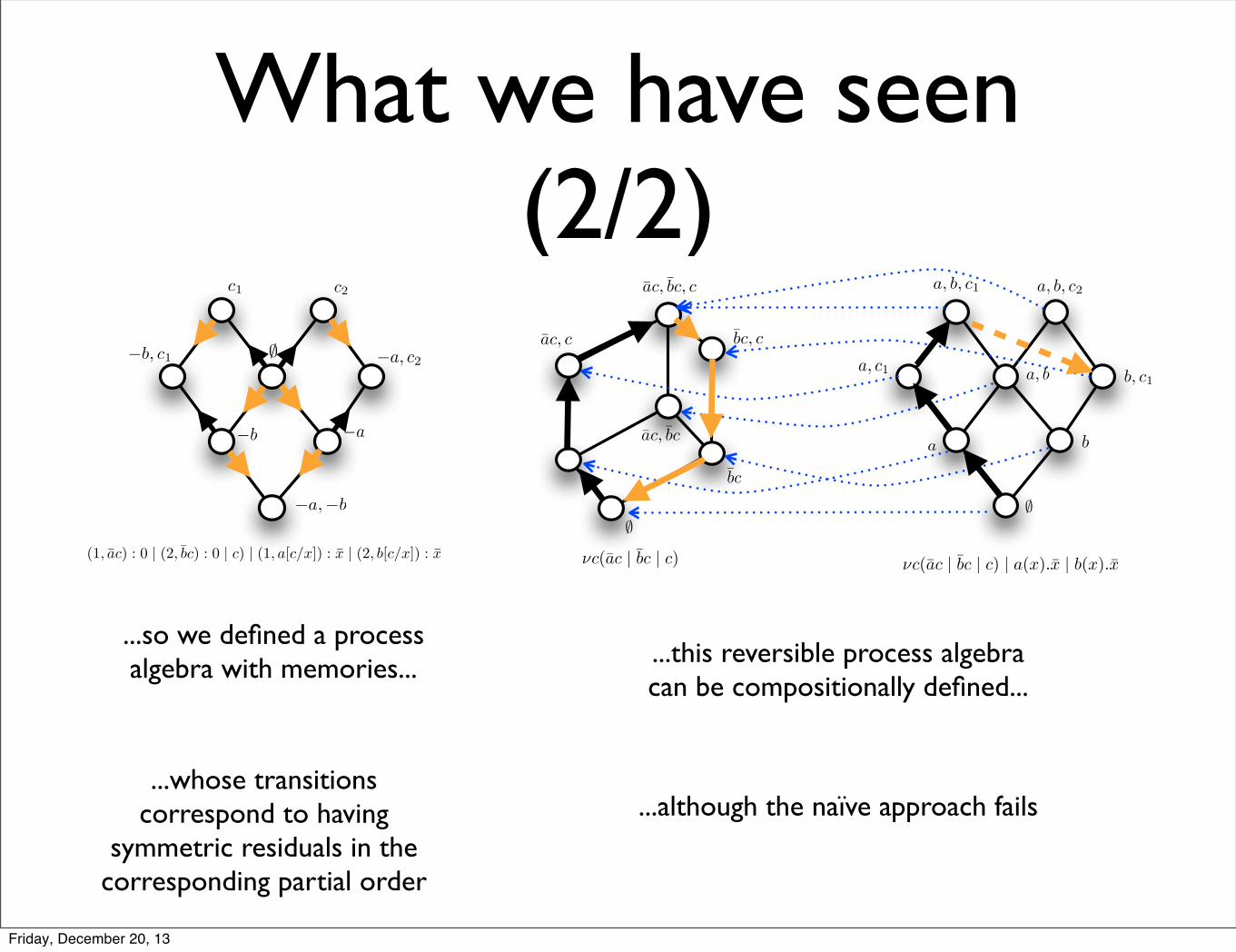
...so we defined a process algebra with memories...
(1, ac) : 0 | (2, bc) : 0 | c) | (1, a[c/x]) : x | (2, b[c/x]) : x
...whose transitions correspond to having
symmetric residuals in the corresponding partial order
Friday, December 20, 13
What we have seen (2/2)
;
�b
c1 c2
�b, c1 �a, c2
�a
�a,�b
...so we defined a process algebra with memories...
(1, ac) : 0 | (2, bc) : 0 | c) | (1, a[c/x]) : x | (2, b[c/x]) : x
...whose transitions correspond to having
symmetric residuals in the corresponding partial order
;
a b
a, c1 b, c1a, b
a, b, c1 a, b, c2
⌫c(ac | bc | c) | a(x).x | b(x).x
;
bc
ac, c bc, c
ac, bc
ac, bc, c
⌫c(ac | bc | c)
...this reversible process algebra can be compositionally defined...
...although the naïve approach fails
Friday, December 20, 13
The REVER project
• Denotational semantics for the pi-calculus
• Reversible abstract machine
• Corresponding bisimulation
• Proof technique (transactional theorem)
• and we are hiring post-docs...
Friday, December 20, 13
Friday, December 20, 13





























