Embed Size (px)
Citation preview

The Pennsylvania State University
The Graduate School
College of Engineering
INVESTIGATION OF NOISE FROM ELECTRIC, LOW-TIP-SPEED
AIRCRAFT PROPELLERS
A Thesis in
Aerospace Engineering
by
Bolor-Erdene Zolbayar
© 2018 Bolor-Erdene Zolbayar
Submitted in Partial Fulfillment
of the Requirements
for the Degree of
Master of Science
August 2018

The thesis of Bolor-Erdene Zolbayar was reviewed and approvedú by the following:
Kenneth S. Brentner
Professor of Aerospace Engineering
Thesis Advisor
Sven Schmitz
Associate Professor of Aerospace Engineering
Jack W. Langelaan
Associate Professor of Aerospace Engineering
Director of Graduate Programs
úSignatures are on file in the Graduate School.
ii

Abstract
This thesis focuses on propeller noise considerations that would be appropriate for a6-9 passenger low-tip-speed, electric propeller-driven aircraft. A baseline aircraft andpropeller are used for reference, but all the propellers evaluated in this work havebeen designed for appropriate tip speeds considered. Electric motors are lighter thanconventional combustion engines. They also can operate at low-tip-speed more e�ectivelythan conventional internal combustion engines. These characteristics allow aircraft tohave multiple low-tip-speed propellers, which can result in a reduction in propeller noise.In this research, the noise of isolated propellers designed for low Mtip=0.3 and 0.4 wasinvestigated and compared with noise of a baseline propeller designed for Mtip=0.7 forthe same thrust and forward aircraft speed.
The design and analysis code CROTOR is used to design all the propellers in thiswork. The lower tip speed reduces the noise considerably, but the individual noise sourcestend to not scale with tip Mach number in the same way. With steady axisymmetricinflow at the level flight condition, the maximum propeller noise is always found in thepropeller plane. To study the relationship between propeller noise and tip speed, isolated3 and 6-bladed propellers are designed for various tip speeds. (Mtip = 0.3, 0.4, 0.5, 0.6,and 0.7). For steady level flight cases, the noise in the propeller plane is found to be thehighest and is found to have a linear relationship with blade tip speed.
Unsteady loading is implemented as an approximation to the loading propellerexperiences when it operates at an angle of attack. The e�ect of unsteady loading isshown to change the directivity of the noise distribution substantially in the plane ofthe propeller and to impact the ultimate noise reduction achievable through tip speedreduction, especially for low-tip-speed designs. In particular, along with the propeller axisof rotation, the noise levels do not change significantly with tip speed, while in the planeof the propeller, the noise reduction with reduced tip Mach number is promising. However,with higher angles of attack, the noise below the propeller increases substantially, and itsdirectivity rotates approximately by the angle of attack –.
Increasing the number of blades can result in significant noise reduction in theplane of rotation (up to 25 dB), but practical limits on the number of blades shouldbe investigated. Distributed electric propulsion system makes it feasible to use several
iii

smaller propellers. So, configurations with 1, 2, 4, and 6-propellers designed in CROTORcode were considered. In the plane of rotation, the noise directivity becomes increasinglycomplex with an increasing number of propellers and the noise directivity can be shapedinto "loud" and "quiet" directions.
These results are aimed to give some direction that could be helpful to design engineersand to demonstrate how current design and analysis tools can be used in a fast andsimple manner to obtain propeller noise predictions.
iv

Contents
List of Figures vii
List of Tables x
List of Symbols xi
Acknowledgments xiv
Chapter 1
Introduction 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Thesis Objective . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Chapter 2
Aeroacoustic Theory 6
2.1 Ffowcs Williams and Hawkings Equation (FW-H) . . . . . . . . . . . . . . 72.2 Farassat’s Formulation 1A . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3 Propeller Noise Sources . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3.1 Harmonic Noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.3.2 Broadband Noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Chapter 3
Noise Prediction Approach 13
3.1 CROTOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.1.1 Blade Element Method and Minimum Induced Loss . . . . . . . . 143.1.2 Blade Loading Calculation . . . . . . . . . . . . . . . . . . . . . . 17
3.2 PSU-WOPWOP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.3 Propeller Design Strategy . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
v

Chapter 4
Results and Discussion 23
4.1 Prediction Set-up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234.2 E�ect of Key Parameters on Single Propeller Noise . . . . . . . . . . . . . 26
4.2.1 Significance of Unsteady Loading . . . . . . . . . . . . . . . . . . . 304.2.2 E�ect of Tip Speed . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.2.3 E�ect of Number of Blades . . . . . . . . . . . . . . . . . . . . . . 384.2.4 E�ect of Lift Coe�cient on Noise . . . . . . . . . . . . . . . . . . . 434.2.5 E�ect of Hub Radius on Noise . . . . . . . . . . . . . . . . . . . . 44
4.3 E�ect of Multiple Propellers . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Chapter 5
Concluding Remarks 50
5.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.2 Recommendations for Future Work . . . . . . . . . . . . . . . . . . . . . . 51
References 53
vi

List of Figures
1.1 Modern and future electric propeller driven aircraft and eVTOL passengerair vehicles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.1 Illustration for advanced and retarded time [11,27]. . . . . . . . . . . . . . 10
3.1 Key steps in noise prediction . . . . . . . . . . . . . . . . . . . . . . . . . 143.2 Dividing propeller blade radially into small segments with width of dr and
radius of r [11] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.3 Airfoil segment at a cross section of propeller blade, showing relationships
between velocity vectors and lift and drag [11] . . . . . . . . . . . . . . . . 153.4 Unsteady loading implementation [16] . . . . . . . . . . . . . . . . . . . . 183.5 Unsteady loading calculation process in noise prediction . . . . . . . . . . 183.6 Propellers at various tip speeds (Mtip=0.3, 0.4 and 0.7) optimally designed
in CRotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.7 Configurations with various number of propellers that have same overall
performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.8 Schematics of the 4, 5 and 6-bladed propellers designed for Mtip = 0.4 . . 22
4.1 Baseline aircraft with its propeller designed in CROTOR. . . . . . . . . . 234.2 Baseline propeller designed in CROTOR. . . . . . . . . . . . . . . . . . . 244.3 Orientation of single propeller . . . . . . . . . . . . . . . . . . . . . . . . . 254.4 Location of observers on X-Z plane . . . . . . . . . . . . . . . . . . . . . . 254.5 Overall sound pressure level (OASPL,dB) polar directivity in the X-Z
plane of a 3-bladed propeller operating at Mtip=0.7 . . . . . . . . . . . . . 264.6 Overall sound pressure level (OASPL, dB) polar directivity in the X-Z
plane of a 3-bladed propeller operating at Mtip=0.7 and acoustic pressuretime history (Pa) plotted at 30 deg increments below the propeller . . . . 27
4.7 Acoustic pressure time history plotted for one revolution for each blade ofthe baseline propeller at elevation angle of 180 deg . . . . . . . . . . . . . 28
4.8 Comparison of steady and unsteady cases by overall sound pressure level(OASPL, dB) on same plot . . . . . . . . . . . . . . . . . . . . . . . . . . 31
vii

4.9 Comparison of steady and unsteady cases by overall sound pressure level(OASPL, dB) polar directivity in the X-Z plane of a 3-bladed propelleroperating at Mtip = 0.7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.10 Overall sound pressure level (OASPL, dB) polar directivity in the X-Zplane of a 3-bladed propeller operating at Mtip=0.7 and acoustic pressuretime history (Pa) plotted at 30 deg increments below the propeller . . . . 32
4.11 Comparison of acoustic pressure time history in the direction of polarangle 180 deg between steady and unsteady cases . . . . . . . . . . . . . . 33
4.12 Propellers at various tip speeds (Mtip=0.3, 0.4 and 0.7) optimally designedin CROTOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.13 Overall sound pressure level (OASPL, dB) directivity on the X-Z plane forthree tip Mach numbers (0.3, 0.4, 0.7) and two propeller angles of attack(0. and 10 deg). The observer distance is 30 m from the propeller axis. . . 34
4.14 Thickness, loading, and total overall sound pressure level (OASPL, dB)directivity on the X-Z plane for three tip Mach numbers (0.3, 0.4, 0.7)and two propeller angles of attack (0. and 10 deg). The observer distanceis 30 m from the propeller axis. . . . . . . . . . . . . . . . . . . . . . . . . 36
4.15 The noise level at an observer point on the top of propeller (30 m awayfrom propeller hub) in the plane of rotation of 3-bladed and 6-bladedpropellers designed for Mtip = 0.3, 0.4, 0.5, 0.6, and 0.7 . . . . . . . . . . 37
4.16 Schematics of the 4, 5 and 6-bladed propellers designed for Mtip = 0.4 . . 384.17 Comparison of overall sound pressure level (OASPL, dB) directivity in the
X-Z plane for 4, 6, and 8-bladed propellers operating at Mtip = 0.4 andat two di�erent propeller angle of attacks (0 and 10 deg). The observerdistance is 30 m from the propeller axis. . . . . . . . . . . . . . . . . . . . 40
4.18 Acoustic pressure time history of noise components at observer point onthe top of propeller (30 m away from propeller hub) for 4, 6, and 8-bladedpropellers at –=0 and 10deg. . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.19 Acoustic pressure amplitude ratio between single blades and all blades atobserver point on the top of propeller (30 m away from propeller hub) for4, 6, and 8-bladed propellers at – = 0 deg . . . . . . . . . . . . . . . . . . 42
4.20 Overall sound pressure level (OASPL, dB) at observer point on the top ofpropeller (30 m away from propeller hub) for 4, 6, and 8-bladed propellersat – = 0 deg . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.21 Comparison of overall sound pressure level (OASPL, dB) directivity ofnoise components in the X-Z plane for 6-bladed propellers designed for Cl
of 0.5, 0.7, and 0.9 operating at Mtip = 0.4 and at two di�erent propellerangle of attacks (0 and 10 deg). The observer points are 30 m away fromthe propeller hub. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
viii

4.22 Comparison of overall sound pressure level (OASPL, dB) directivity ofthickness, loading, and total noise in the X-Z plane for 6-bladed propellersdesigned for hub radius of 0.05, 0.1, and 0.15 m operating at Mtip =0.4 and at two di�erent propeller angle of attacks (0 and 10 deg). Theobserver points are 30 m away from the propeller hub. . . . . . . . . . . . 45
4.23 Configurations with various number of propellers that have same overallperformance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.24 Overall sound pressure level (OASPL, dB) polar directivity plots in theY-Z for 4 di�erent multi-propeller configurations, 0 deg propeller angle ofattack. Note: This is the front view, with the polar angle 0 deg on theport wing of the aircraft, 90 deg above, 180 deg on the starboard wing,and 270 deg below the aircraft. The observer distance is 30 m from thecenterline of the aircraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.25 Multi-propeller overall sound pressure level (OASPL, dB) polar directivityin Y-Z plane (front view) for two di�erent propeller angles of attack (0and 10 deg). The observer distance is 30 m from the centerline of theaircraft. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.26 Multi-propeller overall sound pressure level (OASPL, dB) polar directivityin X-Z plane (side view) for three di�erent propeller angles of attack (0and 10 deg). The observer distance is 30 m from the centerline of theaircraft. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
ix

List of Tables
4.1 Input parameters of CROTOR design and analysis code for a baselinepropeller of Tecnam P2012 operating at Mtip=0.7 . . . . . . . . . . . . . . 24
4.2 Input parameters of CROTOR for a propeller operating at Mtip = 0.3 case. 354.3 Input parameters of CROTOR for a propeller operating at Mtip = 0.4 case. 354.4 Input parameters of CROTOR for 4, 6, and 8-bladed propellers operating
at Mtip = 0.4 case. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.5 Input parameters of CROTOR for 1-propeller configuration operating at
Mtip=0.4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.6 Input parameters of CROTOR for 4-propeller configuration operating at
Mtip=0.4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.7 Input parameters of CROTOR for 6-propeller configuration operating at
Mtip=0.4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
x

List of Symbols
· Source time
Ab Total blade area
⇤2 Wave operator
c Speed of sound
Cd Coe�cient of drag
Cl Coe�cient of lift
CT Coe�cient of thrust
E Total energy in the spectrum
f = 0 Function that describes source surface
Nb Number of blades
pÕ Acoustic pressure
r Distance between observer and source time
R Propeller blade radius
t/c Thickness to chord ratio
T Propeller thrust
Tij Lighthill stess tensor
U Freestream velocity
Vtip Propeller tip speed
xi
W/A Disk loading
–f Amplification factor
fl Density of medium
dS Element of acoustic data surface
li Local force intensity that acts on the fluid
Pij Compressive stress tensor
pref Reference pressure, 2 ◊ 10≠5Pa
S Spectrum of the normalized pressure fluctuations
t Observer time
ui Component of local fluid velocity
vn Local normal velocity of source surface
x Observer position vector
y Source position vector
Mtip Rotational tip speed Mach number
Abbreviations
UAV Unmanned air vehicle
LEAPtech Leading edge asynchronous propeller technology
BVI Blade-Vortex Interaction
NASA National Aeronautics and Space Administration
DEP Distributed electric propulsion
OASPL Overall sound pressure level
MIL Minimum induced loss
BEM Blade element method
ETHACS Economical thin haul aviation concepts
SPL Sound pressure level
xii

VTOL Vertical take-o� and landing
Subscripts
0 Undisturbed medium
1/3 1/3-octave band
L Loading noise component
n Outward normal vector to the surface
r Radiation direction
ret Retarded time, · = t ≠ r/c
T Thickness noise component
xiii

Acknowledgments
First I would like to thank my adviser, Dr. Kenneth S. Brentner, for helping me everystep of the way and guiding me over the past two years. I also would like to thank mylabmates, Kalki Sharma, Mrunali Botre, Thomas Jaworski, Ajay Singh, and MarianoScaramal for their help and friendship. Lastly, I would like to thank my family for theirlove and support.
This work has been partially supported by the Georgia Institute of Technology aspart of their NASA LEARN project entitled "Economical Thin-Haul Aviation Concepts(ETHACS)" and partially by Penn State. Any opinions expressed within this thesis aresolely those of the authors.
xiv

Dedication
This thesis is dedicated to the memory of my beloved grandmother, Altantsetseg Dambi-inyam.
xv
Chapter 1 |Introduction
1.1 Motivation
Aircraft noise is a key environmental concern in communities and important factor
for health and psychological wellness of flight crew and passengers. Scientists have
determined that stress due to aircraft noise may cause cardiovascular e�ects, sleep
disturbance, conscious and premature awakening, and long-term health problems [1].
Furthermore, aircraft noise may cause negative emotions and cognitive impairment in
children and impact their learning ability [1]. Environmental agencies in Europe suggest
that aircraft noise, a significant part of the environmental noise, is more harmful to
people’s health than passive smoking [2]. Since 1999, the World Health Organization has
recommended aircraft noise in the nighttime should not exceed 45 dB because it increases
the risk of heart attacks, strokes, and dementia [3]. For all these reasons, investigating
the noise from electric, low-tip-speed propellers, has become a subject of intense interest.
In recent years, there has been enormous interest in small electric propeller-driven air-
craft, VTOL (Verical take-o� and landing) passenger vehicles, and small UAVs (Unmanned
air vehicles)/drones. Within a few years, researchers from NASA Langley Research Cen-
ter and Armstrong Flight Research Center plan to fly their DEP (Distributed Electric
Propulsion Driven) X-plane, replacing wings and engines of a Tecnam P2006 with their
improved version of LEAPTech wing technology [4]. The goal of the LEAPTech project
is to help a substantial part of the aircraft industry to make a transition to electrical
1

Figure 1.1. Modern and future electric propeller driven aircraft and eVTOL passenger airvehicles
propulsion within ten years. Furthermore, many potential vehicles have been made or
proposed for the 2-6 passenger vehicle market with a targeted range of less than 200
miles as shown in Fig. 1.1. In 2016, Uber has expressed a strong desire to use small
electric VTOL vehicles as part of their future infrastructure; therefore, creating new
markets [5]. They proposed to launch air taxi networks in Dubai and Dallas as soon as
2020. Furthermore, Uber foresees flight to be a daily part of urban transportation, and
they want to o�er pricing for their electric VTOL aircraft service that is comparable to an
UberX ride. Most large aerospace corporations are investing in the development of small
electric VTOL air vehicles and aircraft to stay competitive in the market; for example,
A3, the Silicon Valley Research and Development outpost of Airbus, has recently tested
its Vahana electric VTOL air vehicle in its first flight [6]. They foresee the future of
transportation as an electric VTOL air vehicle and distributed electric propulsion (DEP)
driven aircraft.
Once these vehicles become a daily part of transportation and a necessity in our lives,
there will be a significant increase in noise emitted to the communities. Thus, low-tip-
speed electric propellers are required, which potentially promise to decrease propeller
noise. Investigating noise from electric, low-tip-speed propellers is an essential task. All
these proposed designs will benefit from significant improvements in battery technology
and electric motor design. Modern electric motors that are expected to have smaller
size and lower weight than conventional combustion engines might allow the vehicles to
2

have multiple low tip-speed propellers. This distributed electric propulsion system can be
used to augment wing lift at low speeds, provide VTOL capability, simplify or eliminate
mechanical controls, and provide low maintenance and redundancy (and hence, safety).
This research work started as an acoustic analysis of Georgia Tech’s project "Eco-
nomical Thin-Haul Aviation Concepts" (ETHACS), which was part of the Leading Edge
Aeronautics Research for NASA (LEARN) program. The goal of the project was to
design 6-9 passenger economically e�cient DEP driven aircraft, which provides low-cost
transportation between small airports [7]. The Tecnam P2012 Traveller aircraft was
chosen as a baseline aircraft for comparison with advanced concepts developed in the
project. The Tecnam P2012 is a twin-engine aircraft with a modern, unswept propeller
design. It carries 6-9 passengers and 1-2 pilots. The aircraft is equipped with 2 Lycoming
TEO-540-C1A engines which each provide 375 hp. The Tecnam P2012 can reach a
maximum cruise speed of 190 kts (100 m/s) and has a maximum takeo� weight of 8000 lb.
One of the most important advantages of using an existing aircraft design as a baseline
aircraft is that data from the baseline aircraft with conventional combustion engines
can be compared to data generated by the exact same model with electric propulsion.
The research focus was based on only the level flight condition with size and operating
condition of the Tecnam P2012 propeller.
Furthermore, a propeller of similar size has been designed with Mtip = 0.7 as a
baseline, and the noise is compared to propellers designed for Mtip = 0.4 and 0.3 values,
for propellers that are expected to be more representative of electric, low tip-speed, low-
noise propellers. To ensure the performance of various tip speed propeller configurations,
the CROTOR code was used to design the propellers used in this work. The design
philosophy used for the comparisons will be explained in more detail in the upcoming
sections. The CROTOR code was also used to provide blade loading for steady and
unsteady loading noise predictions presented in this work.
For conventional aircraft, propellers with thin blades (thickness/chord ratio about
6%) and small camber, the propeller e�ciency only shows a substantial decline for Mtip
> 0.9. However, to keep the noise down to an acceptable level, tip speed must decrease to
have a considerable noise reduction. In fact, the component noise sources do not all vary
3

with Mtip in the same way. Therefore, in this research, the acoustic fields of propellers at
various tip Mach numbers are compared to di�erent configurations that can nominally
perform the same mission, which will be shown in the following chapters.
1.2 Thesis Objective
The focus of this thesis is to investigate noise from low-tip-speed, electric propellers that
can provide guidance to design engineers on how to make low noise electric propellers. To
investigate the propeller noise, the research focuses on the noise distribution of a baseline
single propeller operating with steady inflow at the level flight condition of the baseline
aircraft. To perform that simulation in the noise prediction code PSU-WOPWOP, the
propeller is designed, and its loading and geometry are calculated in CROTOR. Since a
propeller operating with steady inflow is rarely the case in real life, an unsteady loading
calculation methodology is created, and the unsteady loading calculation is performed by
using CROTOR at multiple azimuth (or time) steps. After that, the e�ect of tip speed
is investigated. To do that, low-tip-speed propellers at the same operating condition
are designed in CROTOR and the acoustic results predicted by PSU-WOPWOP are
compared. Then, the e�ect of number of blades, propeller lift coe�cient, and propeller hub
radius are investigated with low-tip-speed designs at the same operating condition. After
all the predictions and analysis, the e�ect of multiple propellers on noise is investigated
because the future eVTOL and DEP aircraft are expected to have multiple propellers.
The following tasks were included in this thesis:
1. Design the baseline propeller of Tecnam P2012 in CROTOR and perform an acoustic
analysis in PSU-WOPWOP.
2. Design low-tip-speed Mtip=0.4 and 0.3 propellers and compare their noise with baseline
propeller noise.
3. Introduce unsteady loading calculation methodology into the acoustic predictions and
compare noise predictions of steady and unsteady inflow cases.
4. Choose important parameters for noise of single single and multiple propellers in
appropriate operating conditions and investigate their significance.
4

5. Design various low-tip-speed single and multiple propeller configurations by changing
the important parameters in appropriate conditions for comparisons and perform an
acoustic analysis on the e�ect of those parameters on the noise.
1.3 Contributions
In general, this research makes three primary contributions based on the tasks above.
1. The change in tip speed due to unsteady inflow was formulated and a quasisteady
approximation that enables the use of CROTOR for unsteady loading computation -
even though it does not compute unsteady loads on its own - was developed. Then, this
unsteady loading was used in PSU-WOPWOP to predict the noise.
2. Low-tip-speed propellers were designed using operating conditions and geometry
representative of the baseline propeller. Noise of various low-tip-speed aircraft propellers
computed with the PSU-WOPWOP noise prediction tool was investigated.
3. The e�ect of critical parameters of propeller noise, including unsteadiness, tip speed,
number of blades per propeller, lift coe�cient, hub radius, and number propellers were
investigated.
5

Chapter 2 |Aeroacoustic Theory
Aeroacoustics is a comparatively new branch of acoustics that studies noise generated
by turbulent fluid motion or aerodynamic forces interacting with surfaces. In short, it
is a study of aerodynamically generated sound. Since the noise is really a propagation
of pressure, it is governed by the conservation laws of fluid mechanics, which includes
conservation of mass, momentum, and energy.
In history, the development of aeroacoustics is driven by research and study of aircraft.
The first theory of aeroacoustics is based on the famous work of Sir James Lighthill and
his "acoustic analogy" in 1952 [8]. The acoustics analogy is directly derived from the
compressible Navier-Stokes equations. Lighthill rearranged the Navier-Stokes momentum
equation into an inhomogeneous wave equation. Although viscous terms are included
in his original analysis, they are usually neglected because they play a negligible role in
noise generation.
In 1969, Ffowcs Williams and Hawkings published "Sound Generation by Turbulence
and Surfaces in Arbitrary Motion," which is an extension of Lighthill’s acoustic analogy
to moving surfaces [9]. The equation they developed is an exact rearrangement of the
continuity and Navier-Stokes equations using generalized functions. They generalized the
"acoustic analogy" and included moving surfaces. With their method, predicting noise
generated by blades of aircraft propellers or helicopter rotors became more feasible.
6

2.1 Ffowcs Williams and Hawkings Equation (FW-H)
The equation of Ffowcs Williams and Hawkings (FW-H) is an exact reformulation of
the Navier-Stokes and continuity equations. Based on their mathematical structure, the
three terms on right side of the Eqn. 2.1, respectively, represent monopole, dipole, and
quadruple terms.
⇤2p
Õ(x, t) = ˆ
ˆt{[fl0Un + fl(un ≠ Un)]”(f)}
≠ ˆ
ˆxi{[Pijnj + flui(un ≠ Un)]”(f)}
+¯2
ˆxiˆxj[TijH(f)]
(2.1)
where x is the observer position and pÕ is the acoustic pressure. The mathematical
notation ⇤2 represents the wave operator and equals to [(1/c
2)( ¯2/ˆt
2)] ≠ O2, where O
2
is the Laplacian, (c - the speed of sound), fl0 represents the density of undisturbed air, n
is a unit normal vector to the surface defined by f = 0. The tensor Pij is the compressive
stress tensor, un and Un represent the component of fluid velocity normal to the surface
and the local normal velocity of the source surface, respectively. The function f implicitly
defines the integration surface; and f has the value.
f < 0 within the surface
f = 0 on the surface
f > 0 outside the surface
(2.2)
Thickness noise and loading noise in Eqn. 2.1 are represented by the monopole and
dipole sources, respectively. The value Dirac delta function, ”(f), is 0 for points not on
the surface. For that reason, thickness and loading noises are restricted to the blade
surfaces. The third component, the quadrupole term, on the other hand, has nonzero
values only outside the surface due to its Heaviside function H(f).
7

H(f) =
Y__]
__[
0 when f<0
1 when f>0(2.3)
Each source term has its physical meaning. The thickness noise due to the monopole
source is generated when blade surface displaces the fluid. The loading noise due to dipole
source is a result of distributed aerodynamic forces on the blade. The quadrupole source
term is responsible for non-linearities due to variation in local sound speed and finite
velocity of fluid near the blade surface. The quadrupole source is the double divergence
of the Lighthill stress tensor, Tij , which is defined as
Tij = fluiuj ≠ Pij ≠ c2(fl ≠ fl0) (2.4)
2.2 Farassat’s Formulation 1A
The advantages of the FW-H equation over CFD methods can be shown using an integral
formulation of the FW-H equation. The importance of the FW-H equation is that it is an
inhomogeneous wave equation for external flow problem embedded in unbounded space;
therefore, the free space Green’s function can be used to find an integral representation
of the solution. Almost all of the rotor noise prediction codes have used integration
formulations developed by Farassat.
In short, Farassat’s Formulation 1A [10] is an integral representation of the solution to
the FW-H equation, (valid for blade surfaces moving at subsonic speeds). The formulation
neglects the quadrupole source term and accounts for the monopole and dipole sources of
the FW-H equation. Elimination of the time derivative of the first integral in Formulation
1 of Farassat speeds up the noise calculation and make it more accurate. Formulation 1A
can be written as
pÕ(x, t) = p
ÕT (x, t) + p
ÕL(x, t) (2.5)
8

where the thickness noise is defined by
4fipÕT (x, t) =
⁄
f=0
Cfl0( .
vn + v .n)
r|1 ≠ Mr|2
D
ret
dS
+⁄
f=0
Cfl0vn(r
.M r + c(Mr ≠ M
2))r2|1 ≠ Mr|3
D
ret
dS
(2.6)
and the loading noise can be written as
4fipÕL(x, t) =1
c
⁄
f=0
C .lr
r|1 ≠ Mr|2
D
ret
dS
+⁄
f=0
5lr ≠ lM
r2|1 ≠ Mr|26
ret
dS
+ 1c
⁄
f=0
Clr(r
.M r + c(Mr ≠ M
2))r2|1 ≠ Mr|3
D
ret
dS
(2.7)
where f = 0 defines the blade surface; the distance between the observer position x and
the source position y is represented by r = |x ≠ y|; vn = v · n is the surface velocity
(f = 0) in the direction normal to itself where n is a unit normal vector to the f = 0
surface; M and Mr represent the Mach number and Mach number component in the
radiation direction of the source surface f=0, respectively; (in the radiation direction
of the surface f = 0); the unit vector pointing to the observer location from the source
location defines the radiation direction. The term lr represents the loading component in
radial direction on surface. While the terms with r≠2 factor are defined as the near-field
terms, the terms with r≠1 factor are defined as the far-field terms because the far-field
terms have a much larger strength than the near-field terms when r is significantly high.
The Doppler amplification factor is represented by 1/(|1 ≠ Mr|).
In Eqns. 2.5, 2.6 and 2.7, the sound at an observer point x and time t is calculated
by integrating over a range of source positions y and time · . The "ret" subscript in
Eqns. 2.6 and 2.7 indicates that the integrands in these equations are evaluated at the
retarded time. This integral formulation is known as a retarded time formulation and
the relationship between the source time, · , and the observer time, t, can be considered
from two viewpoints.
For the first viewpoint (advanced time approach), if the time when the source emits
9

Source Location
Observer Locationr
(x,t)
(y, )
Sonic velocity = c
ω
Figure 2.1. Illustration for advanced and retarded time [11,27].
the sound wave is (·) [18]. Then, by simple calculation, the time when the sound wave
approaches to the observer will be
t = · + r
c(2.8)
where r = |x ≠ y|.
For the second viewpoint (retarded time approach), if the time when sound wave
approaches to the observer be (t) [18]. Then, by simple calculation, the time when the
source emitted the sound wave will be
· = t ≠ r
c(2.9)
The relationship between the source time and observer time is critical in understanding
the sound generation process central to Farassat’s formulation 1A.
2.3 Propeller Noise Sources
There are two types of propeller noise: 1) harmonic noise generated by the propeller,
which repeats at each revolution, and 2) broadband noise, which is caused by unsteady
loading fluctuations due to turbulence ingestion or turbulence in the propeller blade’s
boundary layer.
10

2.3.1 Harmonic Noise
Harmonic noise can be further subdivided into steady and unsteady components, where
steady noise is related to the steady loading on blades (steady in the blade reference
frame) and thickness noise; whereas the unsteady harmonic noise is a result of unsteady
loading on blades and unsteady blade motion (for thickness noise). The primary source
of harmonic noise is directly dependent on operating condition of a propeller and its
rotational speed. Steady loading on the blade surface occurs when the propeller is
operating in a completely clean and axisymmetric steady inflow. The force components of
steady (constant) lift and drag of the blade in the direction of an observer point change
as the propeller rotates, resulting in an unsteady pressure fluctuation that is felt at the
observer location. However, in the real world, most propellers operate in a non-uniform
inflow due to angle of attack of the propeller, some other inflow distortion, or under the
influence of various unsteady aerodynamics mechanisms - all of which lead to increased
noise beyond the "steady" harmonic noise. In this work, a simple quasisteady model of
the unsteady loading for a propeller operating at an angle of attack is used as a surrogate
of more general unsteady loading.
2.3.2 Broadband Noise
Broadband noise is caused by the interaction between a blade and turbulent flow. In other
words, the randomly fluctuating force on the propeller due to turbulent flow generates the
noise. Propeller broadband noise may be comparatively smaller than the harmonic noise,
but it is more di�cult to predict by first principles, and empirical methods are not as
reliable outside of their normal area of application. For these reasons, the broadband noise
is ignored in this thesis, but it could be quite important for small UAV propellers and
low-tip-speed propellers. Nevertheless, if the unsteady loading is found to be significant,
broadband noise is a form of unsteady loading; therefore, the unsteady loading noise
results given here may give some insight into the importance of broadband noise in the
cases considered.
11

2.4 Summary
A brief history and background of aeroacoustics was presented. Then, the equation
of Ffowcs Williams and Hawkings was explained. It is an exact reformulation of the
Navier-Stokes and continuity equations into an inhomogeneous wave equation. With
Ffowcs Williams and Hawkings equation, predicting noise generated by propeller or rotor
blades became more practical. After that, Farassat’s Formulation 1A was explained. It
is an integral representation of the FW-H equation. Most of the rotor noise prediction
codes uses the integration formulation developed by Farassat. Finally, two main propeller
noise sources are explained: harmonic and broadband noise. This thesis focuses on
harmonic noise which consists of loading and thickness noise. This theoretical background
information will be helpful to understand the noise prediction results.
12

Chapter 3 |Noise Prediction Approach
In this section, the noise prediction process will be described, with some of the unique
details given more attention. The PSU-WOPWOP acoustics prediction tool [17–19] uses
the Ffowcs Williams-Hawkings (FW-H) equation [9] and applies Farassat’s Formulation
1A [10] for integration to predict acoustic pressure. A chordwise compact approximation
[17–19] (an option in PSU-WOPWOP) is used in this thesis’ noise prediction process.
This approximation enables the direct use of propeller blade section loading from other
analysis tools to be used for the loading noise prediction. The full surface geometry of
the propeller is used for the thickness noise predictions. To prepare the input data for
PSU-WOPWOP, the blade surface geometry of propeller is generated using four airfoil
sections of the baseline propeller blade and its blade loading is calculated in the design
and analysis tool CROTOR [12]. The CROTOR code takes an input of number of blades,
blade radius, hub radius, hub wake displacement body radius, airspeed, thrust, rotational
speed, and blade lift coe�cient of the propeller. To prepare the output data of CROTOR
in a format of PSU-WOPWOP input, Thomas Jaworski and Ryan Mcconnell wrote an
interface code. The interface code is also used for unsteady loading calculation. The
interface code uses the CROTOR to generate approximate quasi-steady loading for the
propeller. The code divides the propeller disk into 30 equally spaced azimuth stations
and calculates a tip speed at each station considering the unsteady inflow with an angle of
attack of –. Then, the CROTOR is run at each station to calculate the blade loading at
each location. At last, the output data of the interface code is input into PSU-WOPWOP,
13

which outputs acoustic pressure time history and OASPL at observer points. The overall
key steps for the noise prediction in summed up in Fig. 3.1
Figure 3.1. Key steps in noise prediction
In the following sections, the noise prediction approach and its tools are explained in
detail.
3.1 CROTOR
CROTOR is a code that designs and analyzes ducted and free-tip propellers [12]. The
CROTOR uses minimum induced loss (MIL) and blade element method (BEM) and
generates a propeller design within a short time. The concepts of blade element method
and the minimum induced loss are explained briefly in the following sections.
3.1.1 Blade Element Method and Minimum Induced Loss
The fundamentals of the blade element method is explained in this section. In the process
of BEM, the propeller blade is divided into equally spaced small segments along its span
14

in which each segment will have a geometric shape as a function of airfoil, radius, chord,
and blade angle as shown in Fig. 3.2. Then, aerodynamic forces on each of these small
segments are determined. After that, the forces and moments created by the entire
propeller are found by integrating the aerodynamic forces on each small segment along
the entire propeller blade over one rotor revolution.
Figure 3.2. Dividing propeller blade radially into small segments with width of dr and radius ofr [11]
An airfoil segment at a cross section of propeller blade is shown in Fig. 3.3 where VŒ
is the inflow velocity and �r is rotational speed. The segment lift and drag are dL and
dD, respectively. The geometric blade angle is —, and airfoil angle of attack is –.
Figure 3.3. Airfoil segment at a cross section of propeller blade, showing relationships betweenvelocity vectors and lift and drag [11]
V =Ò
V 2a + V
2t =
ÒV 2
Œ + (�r)2 (3.1)
15

With rotational speed and inflow velocity, the total velocity can be found by Eqn. 3.1.
After that, the angle of attack at each section is calculated using the blade angle and
relative wind angle at section as shown in Eqn. 3.2.
„ = arctan(Va
Vt) = arctan(VŒ
�r)
– = — ≠ „
(3.2)
Then, lift and drag at each segment are calculated based on total velocity. With that
information, by simple 2D airfoil analysis, the relationship between lift, drag, and moment
coe�cients can be found. In the next step, local thrust and torque can be represented by
relative wind angle and local lift and drag coe�cients.
dL = 12ClflV
2cdr
dD = 12CdflV
2cdr
dT = dL cos(„) ≠ dD sin(„) = 12flV
2c(Cl cos(„) ≠ Cd sin(„))dr
dQ = (dL sin(„) + dD cos(„))r = 12flV
2c(Cl sin(„) + Cd cos(„))dr
T = B
ÿdT
Q = B
ÿdQ
(3.3)
At the end, total thrust and torque can be found by integrating local thrust torque over
the small sections divided along the blade span as shown in Eqn. 3.3 [11].
Applying the minimum induced loss method for BEM enables to take into account
the finite span e�ect on circulation distribution and viscous drag in performance analysis
[13–15]. BEM is a very simple method because it does not consider that the circulation is
zero at the blade tip and the blade sections a�ect each other. For that reason, CROTOR
uses the minimum induced loss method in BEM in an iterative way. This method of
CROTOR is known as an excellent method of analyzing rotor performance in a quick
and accurate way. For minimum induced loss condition, propeller blade of minimum
induced loss can be seen as a rotating version of minimum induced wing (elliptically
loaded) [13–15]. In that condition, the blade has constant lift to drag ratio radially.
16

Therefore, finding distribution of circulation requires overall lift coe�cient, which is
asked in the input of CROTOR propeller blade design selection. During the design
iteration, CROTOR finds the distribution circulation that agrees with the given overall
lift coe�cient. The MIL of CROTOR is an iterative numerical method, which requires a
valid starting condition for convergence. For blade section analysis, chord, twist angle,
lift and drag coe�cients, airspeed, and rotational speed at each blade section have to be
known.
3.1.2 Blade Loading Calculation
To make an acoustic prediction, the PSU-WOPWOP [17–19] code requires an input of
geometry, loading, and operating condition of propeller blades. The computation of
propeller blade loading was performed with the CROTOR propeller design tool [12]. In
fact, the blades were first designed with CROTOR - to ensure they were reasonable blade
designs for the operating condition - and then the spanwise loading was dimensionalized
and converted into a format required by PSU-WOPWOP. The CROTOR extensions
to XROTOR provide a blade lofting capability that was used to generate the propeller
blade surface geometry needed by PSU-WOPWOP for thickness noise prediction. For
the unsteady loading calculations (propeller at angle of attack or yaw angle), CROTOR
was also used in a simple manner to produce approximate quasi-steady loading for the
propeller. In a steady case, the propeller tip speed around the azimuth is constant.
When introducing an angle of attack, the tip speed varies around the azimuth, as
described by
Vtip = �R + VF sin – sin  (3.4)
where R is propeller radius, � is angular velocity, VF is forward speed, – is propeller
angle of attack, and  is azimuth angle. To model an unsteady flow, the propeller is
analyzed at some fixed number of equally spaced azimuth stations. Each azimuth station
is prescribed a tip speed calculated using Eqn. 3.4 and then CROTOR is run with the
di�erent tip speeds. CROTOR calculates chord length, section Cl and Cd, and twist,
at each spanwise station along the blade (30 span stations used in this paper), which
17

Figure 3.4. Unsteady loading implementation [16]
are used to calculate section lift and drag forces. Next the section lift and drag forces
are used to calculate in-plane and out-of-plane loading forces at each spanwise position
and these loading forces are used in PSU-WOPWOP as periodic loading to predict the
loading noise of the propeller operating at relatively small angles of attack (or yaw). The
unsteady loading calculation process is described in Fig. 3.5
Figure 3.5. Unsteady loading calculation process in noise prediction
18

3.2 PSU-WOPWOP
The PSU-WOPWOP program [17–19] is a robust aeroacoustic prediction tool. The
PSU-WOPWOP program, which is a numerical implementation of Farassat’s Formulation
1A [10] of the Ffowcs Williams-Hawkings equation [9], is used for the prediction of the
harmonic noise generated by the propeller. Formulation 1A, as implemented in PSU-
WOPWOP, is valid in the acoustic near and far fields for arbitrary geometry and subsonic
source motion (the FW-H quadrupole source has been neglected) for stationary and
moving observers. A chordwise compact approximation (an option in PSU-WOPWOP)
has been used in this work, which assumes the propeller is acoustically compact in the
thickness and chordwise directions, but not in the spanwise direction. This approximation
is typically very accurate and enables the direct use of propeller blade section loading
from other analysis tools to be used for the loading noise prediction. For thickness noise
predictions, the full surface geometry of propeller blades is used.
Users input aeromechanical data of aircraft or any other simulated object into PSU-
WOPWOP and it calculates the noise at specified observer locations. Basically, there are
three main steps required to make predictions in PSU-WOPWOP. First, PSU-WOPWOP
requires a geometry data, which has physical location time history of each node for the
noise source. Second, it requires loading data, which has a time history of the load applied
to each node by the fluid. Third, it must have a flight condition setup, orientation, and
movement of the helicopter rotor or aircraft propeller.
The core of the PSU-WOPWOP code is an object called a "patch" that stores loading
and surface geometry for a single surface. A collection of patches together describe
the acoustic integration surface for the problem. Observer points are responsible for
post-processing and storing the acoustic pressure time histories calculated by the patches.
The observer locations can be represented in many ways ranging from a single stationary
point to a plane and spherical surface surrounding the aircraft or helicopter. In this
research, observer points along an arc of spherical surface are mostly used (observer
points on a circle).
Once the contributions from all patches are summed up for a specific observer point,
19

and the integration is done, post-processing is accomplished. It can be as simple as writing
an acoustic pressure time history or as complex as applying Fast Fourier Transform (FFT)
and calculating the Overall Sound Pressure Level (OASPL). In this research, OASPL
and acoustic pressure time history are mostly used for acoustic analysis.
3.3 Propeller Design Strategy
The Tecnam P2012 Traveller aircraft was used as the inspiration for the baseline propeller
in this study. The P2012 aircraft has two 3-bladed propellers, each with a radius of
approximately 1.05m. For this study, one of the key features is to consider propellers
with di�erent tip Mach numbers, ranging from Mtip = 0.3 to 0.7.
Figure 3.6. Propellers at various tip speeds (Mtip=0.3, 0.4 and 0.7) optimally designed inCRotor
To investigate the e�ect of the tip speed, comparisons between single propellers
designed to operate at Mtip = 0.3, 0.4, and 0.7 are made because one propeller normally
would not be expected to operate e�ciently, even with variable pitch, over such a wide
range of tip speeds. The most important requirement to have reasonable comparison in
acoustic results for all these designs will be that the forward speed, radius, and thrust
are held constant at 51.44 m/s, 1.05 m, and 2800 N, respectively. So, the solidity (chord
distribution and number of blades) and twist distribution vary in these designs to meet
the performance requirements. The propellers designed in CROTOR are shown in Fig.
3.6.
Another key feature of aircraft noise can be the number of propellers. For that reason,
this research will consider the noise from di�erent numbers of propellers ranging from a
single propeller to six propellers (in each configuration the propellers are colinear in a line
20

parallel with the wing). The di�erent configurations with various number of propellers
are shown in Fig. 3.7.
Figure 3.7. Configurations with various number of propellers that have same overall performance
The design philosophy of all these di�erent comparisons is that the noise of di�erent
configurations needs to be compared in a manner that does not change the performance
in an adverse way or is an "unfair" comparison. To address these issues the ability of
CROTOR to design appropriate propellers for the various operating conditions has been
used. All the comparisons in this research will consider a single flight speed of 51.44 m/s
(100 kts). The total thrust and total swept area (for all propellers) are held constant at
5600 N and 6.92 m2, respectively, to have the same performance for each configuration.
As the propeller tip speed is varied, the propeller is redesigned to ensure it is able to
provide nominally the same thrust (5600N total thrust) at the new tip speed. This
typically will involve changing the solidity (blade chord distribution, number of blades,
or both) and potentially the twist distribution.
If the number of propellers on the aircraft is changed, then the total thrust and
total swept area (sum of all the propellers in each case) are held fixed. As the number
of propellers changes, this also implies that the radius of the propellers change, so an
additional constraint is imposed that the tip Mach number is held fixed as well, which
21

means the rotation speed is not the same for propellers of di�erent radii (i.e., when a
di�erent number of propellers are used on the aircraft). These choices ensure that the
forward speed and total thrust of all propellers are fixed for all cases; Mtip changes only
when desired; and the radius of the propellers vary when the number of propellers used
on the aircraft vary. One other point of notation: While it is standard to refer to the
propeller tip Mach number as the velocity of the tip divided by the local speed of sound,
here the notation is that the rotational velocity divided by the undisturbed medium
speed of sound is referred to as Mtip.
Finally, another important feature of aircraft propellers (number of blades per pro-
peller) in noise is analyzed. In this study, propellers with 4, 6, and 8 blades designed
for Mtip=0.4 are compared. To have a reasonable comparison, thrust, swept area, and
forward speed are held constant. As shown in Fig. 3.8, the blade chord is decreased as
the number of blade is increased.
Figure 3.8. Schematics of the 4, 5 and 6-bladed propellers designed for Mtip = 0.4
22

Chapter 4 |Results and Discussion
4.1 Prediction Set-up
The baseline aircraft for this research is an Italian Tecnam P2012 aircraft. It carries
6-9 passengers and 1-2 pilots. It is a modern twin propeller aircraft equipped with 2
Lycoming TEO-540-C1A engines that provide 750 hp in total. The Tecnam P2012 can
reach maximum cruise speed of 190kts (100 m/s) and has a maximum takeo� weight of
8000 lb.
Figure 4.1. Baseline aircraft with its propeller designed in CROTOR.
23
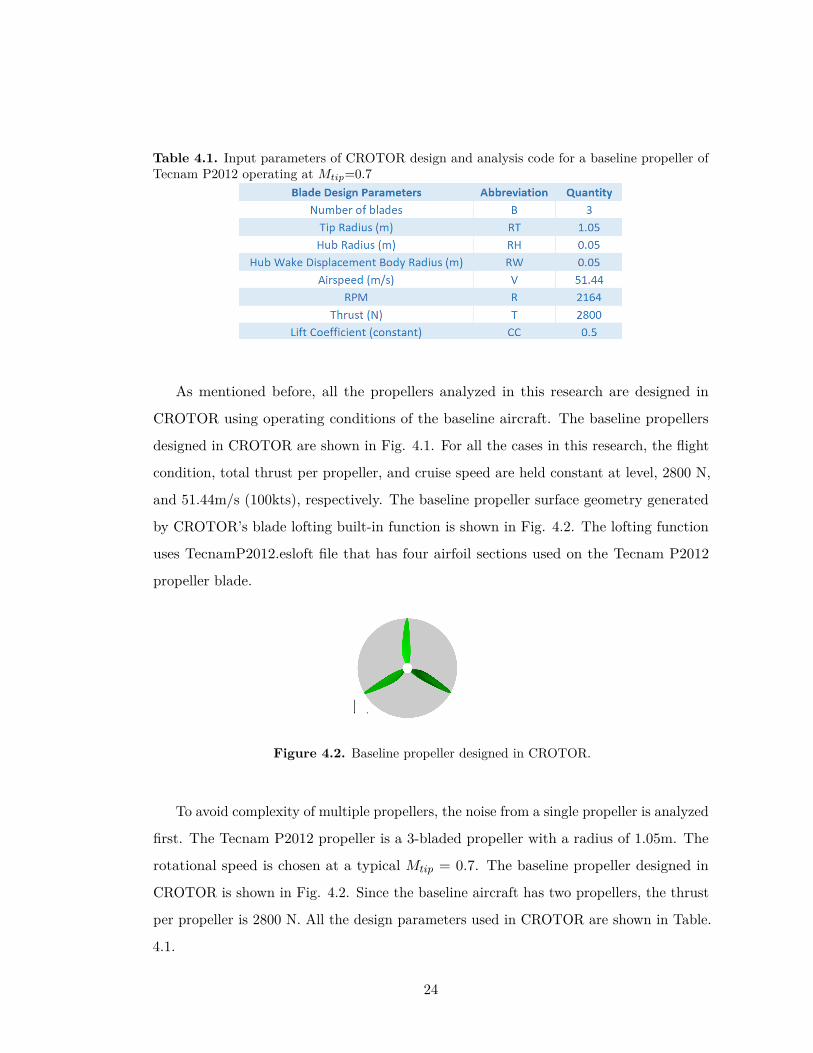
Table 4.1. Input parameters of CROTOR design and analysis code for a baseline propeller ofTecnam P2012 operating at Mtip=0.7
As mentioned before, all the propellers analyzed in this research are designed in
CROTOR using operating conditions of the baseline aircraft. The baseline propellers
designed in CROTOR are shown in Fig. 4.1. For all the cases in this research, the flight
condition, total thrust per propeller, and cruise speed are held constant at level, 2800 N,
and 51.44m/s (100kts), respectively. The baseline propeller surface geometry generated
by CROTOR’s blade lofting built-in function is shown in Fig. 4.2. The lofting function
uses TecnamP2012.esloft file that has four airfoil sections used on the Tecnam P2012
propeller blade.
Figure 4.2. Baseline propeller designed in CROTOR.
To avoid complexity of multiple propellers, the noise from a single propeller is analyzed
first. The Tecnam P2012 propeller is a 3-bladed propeller with a radius of 1.05m. The
rotational speed is chosen at a typical Mtip = 0.7. The baseline propeller designed in
CROTOR is shown in Fig. 4.2. Since the baseline aircraft has two propellers, the thrust
per propeller is 2800 N. All the design parameters used in CROTOR are shown in Table.
4.1.
24

Figure 4.3. Orientation of single propeller
Orientation of the single propeller flying in the -X direction is shown in the Fig. 4.3
where the axis of rotation of the propeller is along the X axis. All the results will be
explained using this orientation in the following sections. The Y-Z plane represents the
plane of rotation of the propeller, and the X-Z plane contains the axis of rotation of
the propeller. In most results, the overall sound pressure level (OASPL) directivity is
presented as a polar plot in the X-Z and Y-Z planes.
Figure 4.4. Location of observers on X-Z plane
To predict the noise in the X-Z plane, 181 observer points are placed on the circle
25

with a 30 m radius centered at the propeller hub, as shown in Fig. 4.4. The propeller is
flying in the -X direction. Each observer on the circle is separated by 2 degrees. This
circular setup is also used to analyze noise distribution in the Y-Z plane. The importance
of this circular setup is that changes in noise due to distance will not a�ect the prediction
because each observer point is 30 m away from the propeller hub. Both the OASPL and
acoustic pressure time history can be studied at the observer locations on the circle in
the X-Z plane.
4.2 E�ect of Key Parameters on Single Propeller Noise
In this section, the impact of changing key parameters of a single propeller on the noise
is investigated. The overall sound pressure level (OASPL) distribution for the baseline,
3-bladed propeller operating with Mtip = 0.7 in axisymmetric 100 kt flight is shown as a
polar plot in the X-Z plane in Fig. 4.5.
Figure 4.5. Overall sound pressure level (OASPL,dB) polar directivity in the X-Z plane of a3-bladed propeller operating at Mtip=0.7
The OASPL levels for the thickness, loading, and total components are plotted as
a function of observer angle in red, blue, and black colors, respectively. Observers are
positioned 30 m from the center of the propeller hub as mentioned in the description
26

of Fig. 4.4. In Fig. 4.5, the polar angle is 0 deg downstream of the propeller and 180
deg upstream, while 90 deg and 270 deg are in the propeller plane. The maximum
OASPL level is found to be approximately 97 dB in the direction of 75 deg and 285 deg,
respectively. In Fig. 4.5, the loading noise is found to be a dominant contributor to
the total OASPL. However, at polar angles around 120 deg and 240 deg, the thickness
noise contributes more than the loading to the total OASPL. The noise in the direction
of 0 deg and 180 deg (on the propeller axis directly downstream and upstream of the
propeller, respectively) is found to be the lowest because this is a steady flight condition
and the propeller inflow and loading are perfectly axisymmetric with respect to the axis
of rotation. This behavior will be compared to the case of unsteady loading, where the
loading is not axisymmetric, in the next section.
Figure 4.6. Overall sound pressure level (OASPL, dB) polar directivity in the X-Z plane of a3-bladed propeller operating at Mtip=0.7 and acoustic pressure time history (Pa) plotted at 30deg increments below the propeller
To investigate the noise more thoroughly, the acoustic pressure time history is shown
27

in Fig. 4.6. The acoustic pressure time histories are shown at elevation angles 30 degrees
apart on the bottom half of the X-Z plane in the figure. One propeller rotation period
is shown in the figure, which is why three blade pulses (for a 3-bladed propeller) are
seen. The acoustic pressure amplitudes are found to be negligible on the propeller axis
(0 deg and 180 deg). As the elevation angle increases from the axis of rotation (180
deg) to the plane of rotation of the propeller (270 deg), the acoustic pressure amplitude
keeps increasing. In fact, acoustic pressure amplitude is largest in the direction of 270
deg. That is not a desirable characteristic because the highest noise is being produced
right below the aircraft, which could a�ect the community the most during flyover. The
acoustic pressure amplitude along the propeller axis (0 deg and 180 deg) is negligible
even though the noise from individual blades is not zero. The reason why noise is so low
on the propeller axis when it is operating in steady inflow can be explained in Fig. 4.7.
Figure 4.7. Acoustic pressure time history plotted for one revolution for each blade of thebaseline propeller at elevation angle of 180 deg
As shown in Fig. 4.7, the acoustic pressure signals from all 3 blades are completely
28

identical because the inflow is steady and axisymmetric. The signal from each blade is
separated by a phase angle of 120 degrees from the other blades. Upon closer examination,
the total acoustic pressure amplitude on the propeller axis actually has three small peaks.
Because the signal from each blade looks similar to sine wave, a simple math expression
(see Eqn. 4.1) can help to explain why the total acoustic pressure signal becomes negligible.
f = sin(x) + sin(x + 120o) + sin(x + 240o)
= sin(x) + sin(60o ≠ x) ≠ sin(60o + x)
= sin(x) + 2 sin (60o ≠ x) ≠ (60o + x)2 cos (60o ≠ x) + (60o + x)
2= sin(x) + 2 sin(≠x) cos(60o)
= sin(x) ≠ sin(x) = 0
(4.1)
In Eqn. 4.1, the sum of the three sine waves is identically zero. This is approximately
the same as the sum of the noise from the three propeller blades. Now, let’s consider this
in a general case with an n-bladed propeller below;
if n = 2k + 1 and a = 360o
n :
f = sin(0) + sin(a) + sin(2a) + ... + sin((n ≠ 1)a)
= sin(a) + sin(2a) + sin(3a) + ... + sin(2ka)
= (sin(a) + sin(2ka)) + (sin(2a) + sin((2k ≠ 1)a)) + ... + (sin(k) + sin(k + 1))
= 2 sin((2k + 1)a2 ) cos((2k ≠ 1)a
2 ) + .. + 2 sin((2k + 1)a2 ) cos(a
2))
= 2 sin((2k + 1)a2 )[cos((2k ≠ 1)a
2 ) + cos((2k ≠ 3)a2 ) + ... + cos(a
2)]
sin((2k + 1)a2 ) = sin(na
2 ) = sin(360o
2 ) = 0
(4.2)
The same proof can be done for the case when n = 2k and it is clear that the noise from
an n-bladed propeller will be negligible along the propeller axis in axisymmetric flow.
In the remainder of the research, the e�ect of unsteady loading, tip Mach number,
number of blades, number of propellers, blade lift coe�cient and propeller’s hub radius
29

will be examined to determine the impact on the noise.
4.2.1 Significance of Unsteady Loading
The primary source of the harmonic noise of the propeller is dependent upon its tip
speed and operating condition. When a propeller operates entirely in steady, clean inflow
aligned with the propeller axis, the propeller blade loading is steady (time independent)
in the blade frame of reference. However, this is rarely the case in typical operation
where the propeller inflow is not completely axisymmetric. In unsteady conditions, the
propeller operates with time-varying inflow; therefore, the angle of attack and velocity
vary both in time and along the span. Such unsteady loading can result in a significant
increase in the noise generated because additional source terms appear in the governing
equations (e.g., the FW-H equation). For example, Gri�th and Revell [20] found that
noise predictions for a low-noise, low-tip-speed propeller were strongly dependent upon
a complete accounting for unsteady loading. The noise was significantly more accurate
when all the sources of unsteady loading were included in the noise predictions. The
unsteady loading calculation is explained in [20].
In this work, when introducing an angle of attack, the tip speed varies around the
azimuth angle of the propeller disk. To model an unsteady flow, the propeller was
analyzed at 30 equally spaced azimuth stations. Each azimuth station  is prescribed a
tip speed calculated using �R+VF sin – sin Â. Then CROTOR is run 30 times with the
di�erent tip speeds at each azimuth station. These loading calculations are input into
PSU-WOPWOP and the OASPL distribution as polar plots in X-Z plane of steady and
unsteady cases are compared in Fig. 4.8. The e�ect of unsteady inflow is represented for
10 deg of angle of attack.
In Fig. 4.8, on the top part of the propeller, the noise in the steady case is substantially
larger than that in the unsteady case. However, the noise is increased significantly - as
much as 6 dB - on the bottom half of the propeller in the unsteady case. The reason that
the noise on the bottom side of the propeller is much larger than that on the top side
of the propeller is that as the propeller rotates downward, the maximum velocity of the
tip is higher due to the angle of attack (�R+VF sin – - at  = 270 deg) than when the
30

Figure 4.8. Comparison of steady and unsteady cases by overall sound pressure level (OASPL,dB) on same plot
blade moves upward, where the angle of attack reduces the velocity (�R-VF sin – - at Â
= 270 deg). This change in velocity as the propeller travels downward or upward results
in a change in Doppler amplification that results in the significant noise di�erence above
and below the propeller. Moreover, it is clear that understanding the e�ect of unsteady
loading more in depth is crucial because it could dramatically increase the noise level
in communities below the flight path. To analyze more in depth, thickness and loading
noise components are plotted with their total in Fig. 4.9.
Figure 4.9. Comparison of steady and unsteady cases by overall sound pressure level (OASPL,dB) polar directivity in the X-Z plane of a 3-bladed propeller operating at Mtip = 0.7
31

As expected, the change in unsteady loading is responsible for the change in total
OASPL. On the other hand, no significant change in thickness noise is observed because
thickness noise is not a function of blade loading. In fact, there is a small shift in the
thickness noise directivity due to the –=10 deg rotation of the propeller. To take a closer
look at the contribution of the unsteady loading, analysis of acoustic pressure time history
is necessary.
Figure 4.10. Overall sound pressure level (OASPL, dB) polar directivity in the X-Z plane of a3-bladed propeller operating at Mtip=0.7 and acoustic pressure time history (Pa) plotted at 30deg increments below the propeller
The acoustic pressure time history has been plotted for the unsteady case at observer
positions below the rotor in Fig. 4.10. Similar to Fig. 4.6, all the acoustic pressure time
history plots have 3 peaks. Also, the acoustic pressure amplitudes are smallest along the
propeller axis. Their magnitudes get larger as they get closer to the propeller’s plane
of rotation. The fact that the pressure amplitudes in the range between 180 and 270
degrees are larger than those in the range between 270 and 360 degrees matches with the
32

OASPL distribution. The reason is that the bottom side with higher noise is tilted to
the front by the – = 10 deg, while the top side with lower noise is tilted to the back by
the angle of attack –.
Figure 4.11. Comparison of acoustic pressure time history in the direction of polar angle 180deg between steady and unsteady cases
As mentioned, with axisymmetric steady inflow, noise is negligible on the propeller
axis because the total noise has perfect cancellation in summation between signals from
each blade. On the other hand, unsteady inflow is not axisymmetric, and there is no
longer perfect cancellation in the summation. The noise is no longer negligible in the
direction of 180 deg for the unsteady case. This is shown in Fig. 4.11.
4.2.2 E�ect of Tip Speed
Blade-tip Mach number is perhaps the most important variable for propeller noise. As
the tip Mach number increases, the noise of the propeller increases rapidly. Typical
general aviation propellers often operate with a rotational blade-tip Mach number (�R/c)
near Mtip = 0.7 or higher. Less consideration has been given to lower tip Mach numbers;
however, many of the proposed electric VTOL vehicles have tip Mach numbers of
approximately Mtip = 0.4 for reduced noise.
To investigate the e�ect of the tip speed, comparisons between single propellers
33

Figure 4.12. Propellers at various tip speeds (Mtip=0.3, 0.4 and 0.7) optimally designed inCROTOR
Figure 4.13. Overall sound pressure level (OASPL, dB) directivity on the X-Z plane for threetip Mach numbers (0.3, 0.4, 0.7) and two propeller angles of attack (0. and 10 deg). The observerdistance is 30 m from the propeller axis.
designed to operate at Mtip = 0.3, 0.4, and 0.7 are compared. The front views of the three
di�erent propellers are shown in Fig. 4.12 along with some key operational parameters.
Recall that the forward speed, radius, and thrust for a single propeller is held fixed at
51.44 m/s, 1.05 m, and 2800 N for all three tip speeds, so the solidity (chord distribution
and number of blades) vary in these designs to meet the performance requirements. The
design parameters for propellers with Mtip = 0.3 and 0.4 are shown in Table. 4.2 and
Table. 4.3, respectively. The plan-form views of the propellers are shown in Fig. 4.12.
Figure 4.13 shows the OASPL polar directivity in the X-Z plane for two propeller
angle of attacks (0 and 10 deg, respectively), representing steady and unsteady inflows,
for each of the three tip Mach numbers (0.3, 0.4, and 0.7). The peak OASPL directly
34

Table 4.2. Input parameters of CROTOR for a propeller operating at Mtip = 0.3 case.
Table 4.3. Input parameters of CROTOR for a propeller operating at Mtip = 0.4 case.
under the propeller (270 deg) decreases from approximately 90 dB for Mtip = 0.7 to 60
dB for Mtip = 0.4 in both steady and unsteady flight conditions.
The main di�erence between steady and unsteady cases is that the maximum noise on
the bottom of the propeller increases by 3-6dB depending on its tip speed. It is certain
that the penalty of unsteady loading is much higher in lower-tip-speed designs. On the
other hand, the noise on the top of the propeller tends to decrease for all tip speed cases,
except for the Mtip = 0.3. For the lowest tip speed case, the noise is increased in all
directions in the unsteady case. The significance of unsteady loading is high for low-tip-
speed propellers. To analyze this more fully, loading and thickness noise components are
plotted in Fig. 4.14.
For the propeller designed for high tip speed (Mtip = 0.7), the thickness noise is as
important as loading noise in the total noise. The significance of thickness noise becomes
smaller for lower tip speed; i.e., Mtip = 0.4. In fact, for lowest-tip-speed propeller design,
thickness noise is not very important compared to those of higher-tip-speed designs,
35

Figure 4.14. Thickness, loading, and total overall sound pressure level (OASPL, dB) directivityon the X-Z plane for three tip Mach numbers (0.3, 0.4, 0.7) and two propeller angles of attack (0.and 10 deg). The observer distance is 30 m from the propeller axis.
which shows that thickness noise changes much more rapidly than the loading noise as tip
speed changes. For the unsteady loading Mtip = 0.3 case, the loading noise completely
characterizes the total noise. Also, the noise is increased in unsteady loading cases for all
designs. To conclude, the significance of unsteady loading is substantial for low-tip-speed
propeller designs. Although the decrease in noise with decreasing tip speed is noticed to
36

be substantial in these results, Hicks and Hubbard [21] found that broadband noise may
contribute a significant part in total noise at low tip speed, especially at Mtip less than
0.5. For that reason, two valuable results can be added in this research. First, it may be
important to model the vortex noise of the propeller and add it to these results. Second,
it may be useful to investigate propeller noise of cases with Mtip of 0.5 and 0.6.
To investigate more about the e�ect of tip speed, 3-bladed and 6-bladed propellers
for various tip speeds (Mtip = 0.3, 0.4, 0.5, 0.6, and 0.7) are designed in CROTOR.
Figure 4.15. The noise level at an observer point on the top of propeller (30 m away frompropeller hub) in the plane of rotation of 3-bladed and 6-bladed propellers designed for Mtip =0.3, 0.4, 0.5, 0.6, and 0.7
Their noise levels at an observer point in the plane of rotation (30 m away from
the propeller hub) are shown in Fig. 4.15. For 6-bladed propellers marked as blue in
Fig. 4.15, the OASPL increases linearly with Mtip representing a simple equation of
OASPL(dB)=70Mtip+40. According to a paper of Hicks and Hubbard of 1947, "The
sound pressure level in dB for a given propeller varies in an approximately linear manner
with the tip speed of the propeller for the range of test Mach numbers" [21]. Although
the propeller designs and their operating conditions are di�erent, this statement agrees
that the tip speed is a very important factor for propeller noise; therefore, the propeller
noise could have a linear relationship with the tip speed. The 3-bladed propellers are
37

also designed for Mtip = 0.3, 0.4, 0.5, 0.6, and 0.7. The 3-bladed propellers designed for
Mtip = 0.3 and 0.4 cases have very large chord blades. The noise of 3-bladed propellers
does not have a perfect linear relationship with the tip speed because thickness noise for
low-tip-speed design is significantly higher for propellers with large chords (the points
except the point at Mtip=0.4 are not perfectly centered on the orange line). As shown,
the 6-bladed designs are at least 10 dB less noisy than the 3-bladed designs. In the next
section, e�ect of number of blades will be investigated.
4.2.3 E�ect of Number of Blades
Figure 4.16. Schematics of the 4, 5 and 6-bladed propellers designed for Mtip = 0.4
An initial investigation into the impact of how many blades are used on a propeller
at low tip speed was performed for Mtip = 0.4. In Fig. 4.16, three di�erent propellers
were designed in CROTOR to operate at 100 kts and produced the same thrust for this
tip speed: 4-bladed, 6-bladed, and 8-bladed, respectively. These propellers use the airfoil
sections with the same design lift coe�cient, and constant solidity, so the main change is
that the chord is smaller for each blade as the number of blades increases. The design
parameters of 4, 6, and 8-bladed propellers input in CROTOR are shown in Table 4.4.
The plan-form view of the propellers are shown in Fig. 4.16.
The OASPL directivity for each of the three propellers is also shown in Fig. 4.17 for
the two di�erent propeller angles of attack (0 and 10 deg). The OASPL levels in the
propeller plane decrease as the number of blades is increased. Increasing from 4 to 8
blades resulted in as much as a 27 dB reduction in the propeller plane for the steady case,
but little less (as much as a 25dB) at 10 deg propeller angle of attack. Along the axis of
the propeller, there is not a consistent reduction with increasing number of blades.
38

Table 4.4. Input parameters of CROTOR for 4, 6, and 8-bladed propellers operating at Mtip =0.4 case.
As shown in Fig. 4.17, the noise tends to decrease as the number of blades increases
in steady cases. However, this relationship is not as clear for the unsteady case. For the
cases with unsteady loading, the 6-bladed propeller has the smallest noise levels of less
than 40 dB along the propeller axis, while the 8-bladed propeller has larger noise as high
as 45 dB in general along the propeller axis. For the 8-bladed propeller at Mtip = 0.4, the
loading noise is the dominant source of noise as shown in Fig. 4.17. On the other hand,
the thickness noise contributes substantially for propeller designs with 4 and 6-blades. In
the work of Hicks and Hubbard [21], they conclude that an appreciable sound-pressure
level reduction could be seen by changing the number of blades of a propeller from two
to seven for comparable operating conditions, which agrees with the trend of results in
this research.
To analyze these results in more depth, acoustic pressure time history of loading,
thickness, and total noise components are plotted in Fig. 4.18. The Y axis defines the
acoustic pressure in Pascals and the X axis defines the one complete revolution of the
propeller in seconds. In each plot, the black solid signal represents the total signal after
summation of signals from each blade in di�erent color (i.e., red, green, pink, and blue
for the 4-bladed propeller). The rows represent di�erent propeller designs, while the
columns represent the noise components (total, loading, and thickness). All plots of 4,
6, 8-bladed propellers have 4, 6, and 8 peaks, respectively, each representing di�erent
blades. As shown, the chord decreases as the number of blades increases. Thus, smaller
chords result in reduction in thickness noise because the volume displaced by each blade
39

Figure 4.17. Comparison of overall sound pressure level (OASPL, dB) directivity in the X-Zplane for 4, 6, and 8-bladed propellers operating at Mtip = 0.4 and at two di�erent propellerangle of attacks (0 and 10 deg). The observer distance is 30 m from the propeller axis.
decreases. As a result, the total amplitude decreases as the number of blades increases
because the thickness noise contributes a significant part of total noise. In fact, the
acoustic pressure amplitude of thickness noise of the 4-bladed propeller is expected to
be the highest because its chord is the thickest. For all propeller designs in the steady
case, the acoustic pressure amplitude of the loading noise is always higher than that of
40

Figure 4.18. Acoustic pressure time history of noise components at observer point on the top ofpropeller (30 m away from propeller hub) for 4, 6, and 8-bladed propellers at –=0 and 10deg.41

thickness noise, which agrees with the OASPL distribution shown in Fig. 4.18.
On the other hand, the acoustic pressure amplitude of loading noise is less or equal
than that of thickness noise in the unsteady cases as shown in Fig. 4.18, which is also
validated by the OASPL distribution in Fig. 4.17. For both cases of –=0 and 10 deg, the
acoustic pressure amplitudes of the loading noise component decreases as the number of
blade increases because the loading per blade goes down when total thrust is fixed.
When the acoustic pressure signal from a single blade is close to a sinusoidal shape
(similar to acoustic pressure signal from a single blade at observer point 30 m away from
the propeller hub on propeller axis), the total acoustic pressure signal turns out to be
negligible as described in Eqn. 4.2. However, for total acoustic pressure time history
of the 4-bladed propeller in Fig. 4.18, the shape of the acoustic pressure signal from a
single blade is not similar to the sinusoidal shape. Therefore, the total acoustic pressure
amplitude is approximately 0.6 Pa.
Figure 4.19. Acoustic pressure amplitude ratio between single blades and all blades at observerpoint on the top of propeller (30 m away from propeller hub) for 4, 6, and 8-bladed propellers at– = 0 deg
The total acoustic pressure amplitude, which is a summation of acoustic pressure
signals from all the blades, decreases if one keeps adding identical pressure signals of
the single blade such that the phasing between neighbor signals are exactly the same.
42

To realize that, the acoustic pressure amplitude ratio between the single blade and
summation of all blades are compared for all cases on the left plot of Fig. 4.19. As
shown in Fig. 4.19, as the number of blades increases, the acoustic pressure amplitude
ratio between a single blade and the summation of all blades increases. In Fig. 4.20, the
OASPL is plotted as a function of the number of blades. The OASPL decreases linearly
with the increasing number of blades.
Figure 4.20. Overall sound pressure level (OASPL, dB) at observer point on the top of propeller(30 m away from propeller hub) for 4, 6, and 8-bladed propellers at – = 0 deg
4.2.4 E�ect of Lift Coe�cient on Noise
The CROTOR code [12] uses a minimum induced loss and blade element theory and
creates detailed designs within a short time. The design procedure produces a blade
geometry as a function of chord and blade angle distribution along the propeller blade
radius. Chord length is directly dependent on lift coe�cient. High lift coe�cient Cl
results in narrow chord while low lift coe�cient Cl results in wide chord. A minimum
induced loss propeller blade is a version of a minimum induced wing. It requires a
spanwise constant induced lift over drag ratio. Finding circulation distribution of the
design requires an overall lift coe�cient Cl. In this iterative process of finding the
distribution, CROTOR determines the circulation that matches with this given overall
lift coe�cient. Keeping the thrust, swept area, and forward speed constant, and lowering
43

Figure 4.21. Comparison of overall sound pressure level (OASPL, dB) directivity of noisecomponents in the X-Z plane for 6-bladed propellers designed for Cl of 0.5, 0.7, and 0.9 operatingat Mtip = 0.4 and at two di�erent propeller angle of attacks (0 and 10 deg). The observer pointsare 30 m away from the propeller hub.
the overall lift coe�cient in CROTOR results in increased blade chord, while increasing
the lift coe�cient results in decreased blade chord. As shown in Fig. 4.21, there is not
a significant change in loading noise. However, thickness noise for the Cl = 0.5 case is
the highest, while that of Cl = 0.9 case is the lowest. This trend is simply because the
thickness noise is a function of propeller blade geometry, and blades with larger chord also
have larger thickness (thickness to chord ratio is fixed), so the thickness noise increases
with lower Cl.
4.2.5 E�ect of Hub Radius on Noise
The propeller hub creates a necessary reaction force for blade loads. Some load components
including air loads are transmitted by the hub to the propeller shaft. Not all structural
loads (such as centrifugal) and air loads are considered in the CROTOR design procedure
because there are only two parameters needed for the design: hub radius and hub wake
44

displacement body radius. However, the hub losses due to the hub wake displacement
body is considered in the various propeller designs in CROTOR. As shown in Fig. 4.22,
the e�ect of hub for the propeller design on the noise is negligible for both steady and
unsteady cases.
Figure 4.22. Comparison of overall sound pressure level (OASPL, dB) directivity of thickness,loading, and total noise in the X-Z plane for 6-bladed propellers designed for hub radius of 0.05,0.1, and 0.15 m operating at Mtip = 0.4 and at two di�erent propeller angle of attacks (0 and 10deg). The observer points are 30 m away from the propeller hub.
4.3 E�ect of Multiple Propellers
Distributed electric propulsion creates an opportunity to increase the number of propellers
taking advantage of the lower weight and smaller size of electric motors. In fact, more
propellers provide redundancy and improved safety. Based on that advantage, one, two,
four, and six propeller configurations were designed to operate at Mtip = 0.4. The
propeller configurations were chosen to be symmetric (the same number of propellers on
each wing), the total swept area (6.93 m2) and total thrust of all the propellers (5600 N)
were held fixed, regardless of the number of propellers, and the tip speed was maintained
45

because this is a key parameter for the noise. Due to these combined requirements, as the
number of propellers was increased, the size of the individual propellers was decreased
and the rotational speed was increased to maintain the tip speed. All the propellers were
six-bladed propellers in this comparison, designed in CROTOR. The input parameters of
1, 4, and 6-propeller configurations for the CROTOR are shown in Table. 4.5, 4.6, and
4.7.
Figure 4.23. Configurations with various number of propellers that have same overall performance
The four multi-propeller configurations are shown from the front in Fig. 4.23. The
most obvious impact of multiple propellers on the noise directivity is the introduction of
interference patterns where the noise from an adjacent propeller can add or cancel the
noise from the other propellers. This can be seen in Fig. 4.24, which shows the overall
sound pressure level directivity in the Y-Z plane (propeller plane) for the 0 deg propeller
angle of attack case. Notice that for one propeller (upper left), the level is the same in
every direction because the acoustic signal is axisymmetric. However, for the 2, 4 and 6
propeller configurations, the OASPL directivity is more complex in the Y-Z plane - and
the complexity tends to increase with the number of propellers. In particular, notice that
for 2 and 6 propellers the OASPL level is more directed in the Z direction (90 and 270
deg), while for the 4 propeller case the OASPL directivity is more along the Y direction
46
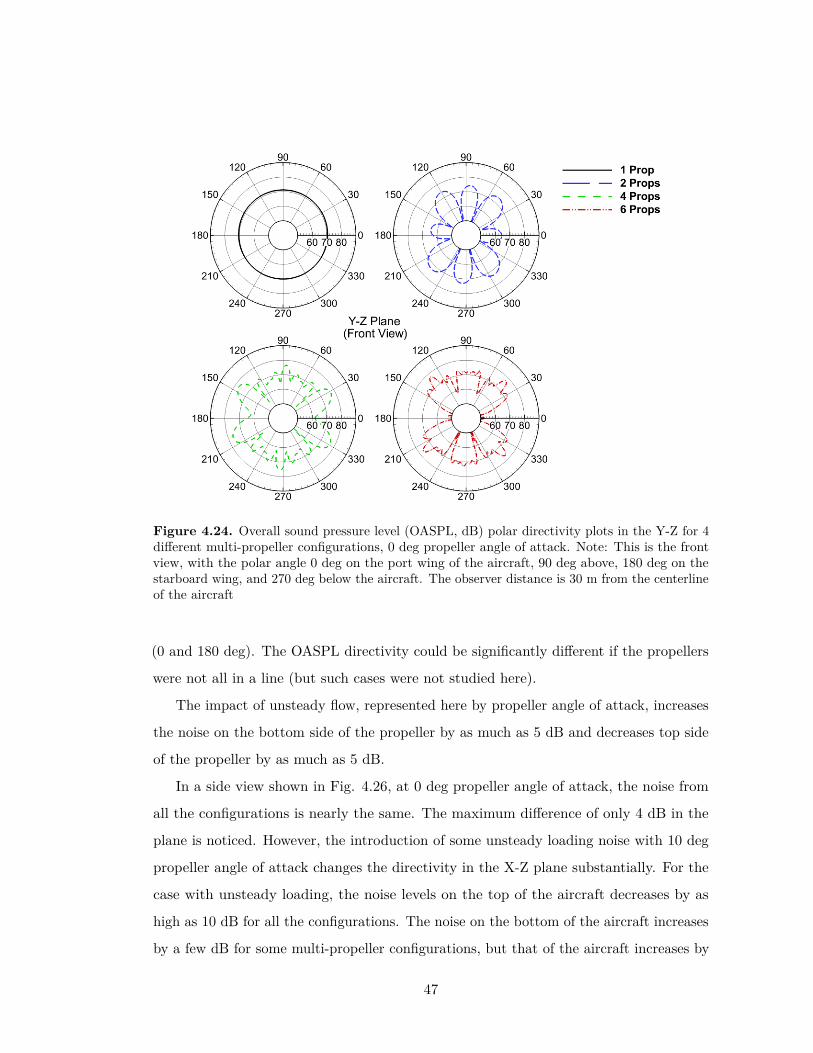
Figure 4.24. Overall sound pressure level (OASPL, dB) polar directivity plots in the Y-Z for 4di�erent multi-propeller configurations, 0 deg propeller angle of attack. Note: This is the frontview, with the polar angle 0 deg on the port wing of the aircraft, 90 deg above, 180 deg on thestarboard wing, and 270 deg below the aircraft. The observer distance is 30 m from the centerlineof the aircraft
(0 and 180 deg). The OASPL directivity could be significantly di�erent if the propellers
were not all in a line (but such cases were not studied here).
The impact of unsteady flow, represented here by propeller angle of attack, increases
the noise on the bottom side of the propeller by as much as 5 dB and decreases top side
of the propeller by as much as 5 dB.
In a side view shown in Fig. 4.26, at 0 deg propeller angle of attack, the noise from
all the configurations is nearly the same. The maximum di�erence of only 4 dB in the
plane is noticed. However, the introduction of some unsteady loading noise with 10 deg
propeller angle of attack changes the directivity in the X-Z plane substantially. For the
case with unsteady loading, the noise levels on the top of the aircraft decreases by as
high as 10 dB for all the configurations. The noise on the bottom of the aircraft increases
by a few dB for some multi-propeller configurations, but that of the aircraft increases by
47

Figure 4.25. Multi-propeller overall sound pressure level (OASPL, dB) polar directivity inY-Z plane (front view) for two di�erent propeller angles of attack (0 and 10 deg). The observerdistance is 30 m from the centerline of the aircraft.
Figure 4.26. Multi-propeller overall sound pressure level (OASPL, dB) polar directivity in X-Zplane (side view) for three di�erent propeller angles of attack (0 and 10 deg). The observerdistance is 30 m from the centerline of the aircraft.
as high as 5 dB for the single-propeller configuration.
48

Table 4.5. Input parameters of CROTOR for 1-propeller configuration operating at Mtip=0.4
Table 4.6. Input parameters of CROTOR for 4-propeller configuration operating at Mtip=0.4
Table 4.7. Input parameters of CROTOR for 6-propeller configuration operating at Mtip=0.4
49

Chapter 5 |Concluding Remarks
5.1 Conclusions
The noise of a single propeller of similar size and capability as that used by the Tecnam
P2012, but designed by CROTOR at Mtip = 0.7, has been compared to the noise of
single propellers designed to operate at lower tip speeds (also designed by CROTOR).
For all the comparisons, the propeller/aircraft forward speed was fixed and the thrust
was held constant (either the same per propeller when comparing isolated propellers or
total thrust fixed for multi-propeller configurations).
In general, the noise is reduced dramatically by reducing the tip speed, but this noise
reduction below the propeller at a high angle of attack is diminished by a significant
amount due to an increase in noise associated with unsteady loading (modeled as a
propeller at an angle of attack in this work).
The unsteady loading is even more important at lower tip speeds because the thickness
noise tends to decrease more rapidly with tip Mach number than the loading noise. The
contribution of thickness noise of a propeller designed for Mtip = 0.3 is minimal where
the total noise distribution is almost the same as the loading noise distribution. Due to
the unsteady loading at high angle of attack of 10 deg, the noise distribution below the
propeller always tends to increase by as high as 6 dB and shifts its directivity by the angle
of attack. Since the propeller noise on the bottom is radiating towards the communities,
the e�ect of unsteady loading should be investigated more in depth. Although the noise
50

of propellers designed at Mtip = 0.3 are lower than that of propellers designed at Mtip =
0.4 and 0.7 in general, low tip speed designs could have higher noise at some elevation
angles due to unsteady loading. Interestingly, the noise in plane of 6-bladed propellers
has a linear relationship with tip speed. (Mtip = 0.3 ≠ 0.7)
Increasing the number of blades, for a fixed propeller thrust, tends to decrease
the OASPL levels, but the rate of decrease with increase in number of blades is more
pronounced in the propeller plane.
For multi-propeller configurations operating at Mtip = 0.4 rotational tip-Mach number,
the directivity pattern in the plane of the propellers becomes more complex when more
propellers are used and the direction in which the noise is maximum can be impacted by
the number of propellers.
5.2 Recommendations for Future Work
In this section, recommendations are made on how to continue with this research and
what subjects can be investigated more in depth to make the study more robust. This
project was intended to investigate noise of electric, low-tip-speed propellers.
In 1974, Gri�th and Revell [20] found that noise predictions for a low tip speed
propeller were strongly dependent upon a complete accounting of unsteady loading and
broadband noise (angle of attack, yaw, and inflow disturbance, etc.) The noise was
significantly more accurate when the unsteady loading and broadband was included in
the noise predictions. In this research, CROTOR was used to produce approximate
quasi-steady loading for the propeller to calculate the unsteady loading calculation, and
the noise reduction in propeller noise was done by reducing tip-speed for both steady
and unsteady inflow cases. However, to make the prediction more accurate, broadband
noise should be included in the prediction process. The propeller noise prediction is never
complete without considering the broadband noise although its significance may be less
than the unsteady loading noise as shown in Gri�th and Revell’s work [20].
It was also concluded in this thesis that increasing the number of blades results in a
reduction in propeller noise. Having propellers with higher number of blades might not
51

always result in a reduction in noise because broadband noise, which is not considered
in this research, may contribute a significant part of total noise for propellers with high
number of blades, especially for low-tip-speed propellers. This should be investigated
more thoroughly for low-tip-speed propellers, especially at di�erent sizes (UAV scale vs
manned aircraft scale).
It was seen that multiple propeller configurations, such as the 6-propeller configuration,
generate less noise than a conventional two propeller configuration for a steady inflow
case. In the steady inflow case, the noise of 6-propeller configurations is still less than
2-propeller configuration in some directions. However, considering broadband noise in
the total noise may result in di�erent conclusions because interaction between propellers
can be very complicated, especially for high number of propeller configurations.
Finally, the noise cancellation techniques applying destructive interference on acoustic
pressure signals from the propellers are recommended to be investigated. In some cases,
the destructive interference between thickness and loading noise signals can be seen in
propeller noise. For that reason, the phasing angle, rotational direction, and spacing of
the propellers are important parameters in propeller noise that could allow designers to
alleviate the propeller noise.
52

References
[1] Swift, Hales, “Potential Health E�ects of Aircraft Noise,” Final Report 19, PurdueUniversity, July 2010.
[2] Berglund, B., Lindvall, T., Schwela, D.H. “Community Noise,” Archives of the Centrefor Sensory Research, Vol. 2, Issue 1, Stockholm University and Karolinska Institute,1995.
[3] Danzon et al. “Night Noise Guidelines For Europe,” World Health Organizations,2009.
[4] Ackerman, E., “NASA’s LEAPTech X-plane Will Fly with 18 Electric Motorsand Tiny Wings” Last retrieved March 19, 2015, https://spectrum.ieee.org/tech-talk/aerospace/aviation/nasas-newest-xplane-will-fly-with-18-electric-motors.
[5] Uber, “Uber Elevate: Fast-Forwarding to a Future of On-Demand Urban Air Trans-portation,” Uber, 2016 https://www.uber.com/elevate.pdf.
[6] Stewart, J.,“Airbus’ Vahana Makes Its First Flight,” Retrieved fromhttps://www.wired.com/story/airbus-vahana-first-flight-faa-certification-flying-cars/ February 2018.
[7] German, B.,“Economical Thin-Haul Aviation Operation Study,” Annual Report,School of Aerospace Engineering, Georgia Tech, 2016.
[8] Lighthill, M. J. “On sound generated aerodynamically. I: General Theory,” Proc RSoc A 1952;211:564-87.
[9] Ffowcs Williams, J.E., Hawkings, D.L., “Sound generated by turbulence and surfacesin arbitrary motion,” Philos. Trans. R. Soc. A 1969; 264(1151):321-42
[10] Farassat, F. and Succi, G. P., “The Prediction of Helicopter Discrete FrequencyNoise,” Vertica, 7(4):309-320, 1983.
[11] Leishman, J. G., “Principles of Helicopter Aerodynamics,” Cambridge UniversityPress, 2010.
[12] Carter, P., “CROTOR - XROTOR on Steroids” Last retrieved December 13, 2017,http://www.esotec.org/sw/crotor.html.
53

[13] Larrabee, E. E., French, S. E., “Minimum induced loss windmills and propellers,”Journal of Wind Engineering and Industrial Aerodynamics, Volume 15, Issues 1-3,December 1983, Pages 317-327.
[14] Kuijk, J., J., A. V., “Analysis of Swirl Recovery Vanes,” MS thesis. TechnischeUniversiteit Delft, Netherlands, 2015.
[15] Larrabee, E. E., “Five Years Experience with Minimum Induced Loss Propellers,”Journal Article, SAE International, Vol. 93, Section 1: 840002–840220 (1984), pp.1130-1137, Netherlands, 2015.
[16] Brentner, K. S., “Challenges of Extremely Quiet Propulsion,” Presentation, Sustain-able Aviation Symposium, San-Francisco, California, 2018.
[17] Brés, G. A., Brentner, K. S., Perez, G., and Jones, H. E., “Maneuvering rotorcraftnoise prediction,” Journal of Sound and Vibration, 275(3-5):719-738, August 2004.
[18] Brés, G. A., “Modeling the noise of arbitrary maneuvering rotorcraft: Analysisand implementation of the PSU-WOPWOP noise prediction code,” M.S. thesis,Department of Aerospace Engineering, The Pennsylvania State University, June2002.
[19] Perez, G., “Investigation of the influence of maneuver on rotorcraft noise,” M.S.thesis, Department of Aerospace Engineering, The Pennsylvania State University,June 2002.
[20] Gri�th, E. D. Revell, J., “Low Noise Propeller Technology Demonstration,” ReportAD-779 773 (AFAPL-TR-73-115), Lockheed California Company, 1974.
[21] Hicks, C. W. Hubbard, H. H, “Comparison of Sound Emission from Two-Blade,Four-Blade, AND Seven-Blade Propellers,” NACA-Technical Note, Washington, 1947.
[22] Torenbeek, Egbert, “Synthesis of Subsonic Airplane Design: An introduction to thepreliminary design of subsonic general aviation and transport aircraft, with emphasison layout, aerodynamic design, propulsion and performance,” Springer Netherlands,1982.
[23] Hreinsson, G. S., “Aircraft Noise,” Virginia Polytechnic Institute and State University,Blacksburg, VA, December 1993.
[24] Chen, H., Brentner, K. S., Lopes, L. V., and Horn, J. F., “A Study of RotorcraftNoise Prediction in Maneuvering Flight,” Proceedings of 42nd AIAA AerospaceSciences Meeting and Exhibit, Reno, NV, January 5-8 2004.
[25] Chen, H., Brentner, K., L.V., L., and Horn, J., “An Initial Analysis of TransientNoise in Rotorcraft Maneuvering Flight,” International Journal of Aeroacoustics,Vol. 5, No. 1, 2006, pp. 1-30.
[26] Munch, C. L., “Prediction of V/STOL Noise for Applications to Community NoiseExposure,” Technical Report TSC-OST-73-19, DOT, May 1973
54

[27] Kalki, S., “Incorporating acoustic assessment into the design and analysis of rotor-craft,” M.S. thesis, Department of Aerospace Engineering, The Pennsylvania StateUniversity, December 2016.
[28] Brooks, T. F., Burley, C. L., “Rotor Broadband Noise Prediction with Comparisonto Model Data,” Journal of the American Helicopter Society, 49:1 (January 2004).
[29] Shirey, J. S., Brentner, K. S., and Chen, H., “A Validation of the PSU-WOPWOPRotor Noise Prediction System,” 45th Aerospace Sciences Meeting and Exhibit,Reno, Nevada, January 8-11, 2007.
[30] Brentner, K. S., Farassat, F., “Modeling aerodynamically generated sound of heli-copter rotors,” Progress in Aerospace Sciences 2003;39:83-120.
[31] Wachspress, D. A., Brentner, K. S., and Page, J. A., “Real-Time Noise Predictionof V/STOL Aircraft in Maneuvering Flight,” CDI Report No. 05-14 under NASAContract NNL05AB01P, July 2005.
[32] Brentner, K. S., Zolbayar, B., and Jaworski, F., J.,“Investigation of Noise FromElectric, Low-Tip-Speed Aircraft Propellers,” AHS Specialists’ Conference, SanFrancisco, CA, January, 2018.
55





























