Embed Size (px)
Citation preview

Inverse Problem of Finding an Unknown Parameter for One-
and Two-dimensional Parabolic Heat Equations
Mohamed Elmajdoub
Problem Report submitted to the Statler College of Engineering and Mineral Resources
at West Virginia University
in partial fulfillment of the requirements for the degree of
Master of Science in Chemical Engineering
Charter D. Stinespring, Ph.D., Chair
Fernando V. Lima, Ph.D.
Yong Yang, Ph.D.
Department of Chemical Engineering
Morgantown, West Virginia 2015
Keywords: Inverse problem, control parameter, non-classical boundary conditions, Temperature overspecification
Copyright 2015, Mohamed Elmajdoub

ABSTRACT
Inverse Problem of Finding an Unknown Parameter for One- and Two-dimensional Parabolic Heat Equations
Mohamed Elmajdoub
In many transient heat transfer problems, accurately measuring thermal properties has
proven to be an important and difficult field of study. It is possible to find the temperature distribution u as well as the control parameter p that simultaneously satisfy the governing partial differential equation. The analysis of simultaneously recovering the heat source control parameter and the solution of the parabolic partial differential equation is referred to as an inverse partial differential equation (IPDE).
In this problem report, inverse problems of finding an unknown time-dependent parameter in one- and two-dimensional Cartesian coordinates are considered. The Crank–Nicolson finite difference method and the predictor–corrector method are used to estimate the time-dependent control parameter and the parabolic solution. The second part of the problem report is devoted to numerical solutions of one- and two-dimensional inverse parabolic heat equation in cylindrical coordinates.
The computational models created in this work are validated with an exact solution for Cartesian problems, real experimental data for one-dimensional cylindrical problem, and MATLAB PDE toolbox solution for two-dimensional cylindrical problems. Numerical simulations demonstrated that one- dimensional Cartesian computational model is accurate, stable and less time expensive than the two- dimensional Cartesian computational model. However, in the real application of the scheme, the results obtained for one-dimensional cylindrical problem are accurate for “short times,” acceptable for “moderate times,” and accurate again for “large times.” In general, the model produces reliable results and the simulated temperature measurements were consistent with the experimental data. In the two-dimensional cylindrical computational model, the direct problem solution is the foundation of the inverse problem. The direct problem is solved by MATLAB PDE toolbox and the overspecified boundary condition E(t) which is one solution of the direct, has been chosen at the midpoint of the of r and z coordinates. The model produce acceptable results at points near the boundary where z is within interval of 0 < z < 0.2 or 0.8 < z < 1, but the solution diverges until it reaches its maximum at the midpoint of z.

iii
ACKNOWLEDGEMENTS
The completion of this work could not have been possible without the help, contributions,
encouragement, and support of so many people. I would first like to thank my Prof. Charter
Stinespring for his standing beside me during my stressful time, and given me hope to move
ahead. But also for his encouragement and friendly guidance during the course of this work. His
valuable advice, great guidance, and contributions in writing this work are always gratefully
acknowledged.
Committee members, Dr. Fernando Lima and Dr. Yong Yang have provided a great
guidance and helpful suggestion and informative discussion. My thanks go to all Chemical
Engineering staff and colleagues who helped me throughout my program. Furthermore, I would
also like to thank Dr. Hamid Bidmus for providing his experimental data from his study.
Last, but not least, I wish to express my appreciation to my wife, Einas, for her patience,
her understanding, and her never-ending support. Finally, I sincerely thank my parents, brothers
and sisters for the constant encouragement they have given me. Apologies in advance to all
others whom I may forget to mention here.

iv
TABLE OF CONTENTS
Title Page ......................................................................................................................................... i
Abstract .......................................................................................................................................... ii
Acknowledgements ....................................................................................................................... iii
Table of Contents ........................................................................................................................... iv
List of Tables ................................................................................................................................. vi
List of Figures ............................................................................................................................... vii
Nomenclature ............................................................................................................................... viii
Chapter 1 : Introduction ...................................................................................................................1
1.1 Objectives of the Study ............................................................................................... 2
1.2 Scope of this Work ...................................................................................................... 3
Chapter 2 : Literature Review .........................................................................................................4
2.1 Direct and Inverse Problem ........................................................................................ 4
2.2 Overview of Previous Work ....................................................................................... 5
2.2.1 1D Parabolic Inverse Problem ......................................................................6
2.2.2 2D Parabolic Inverse Problem ......................................................................8
2.3 Application of Control Parameter Inverse Problem .................................................. 10
Chapter 3 : The Numerical Technique ..........................................................................................12
3.1 The Crank–Nicolson Finite Difference Method ....................................................... 12
3.2 1D Inverse Problem with Point Overspecification ................................................... 13
3.3 The Prediction-Correcting Mechanism for 1D Problem ........................................... 14
3.4 2D Inverse Problem with Point Overspecification ................................................... 18
3.5 The Prediction-Correcting Mechanism for 2D Problem ........................................... 20
3.6 Application of Inverse Problem to Cylindrical Coordinates ..................................... 23

v
3.6.1 1D Cylindrical Coordinate Batch Vessel with Wall Cooling .....................23
3.6.2 2D Cylindrical Coordinates Using PDE Toolbox .......................................26
Chapter 4 : Model Validation And Discussions ...........................................................................28
4.1 Model Numerical Test in 1D Cartesian Coordinates ................................................ 29
4.2 Model Numerical Test in 2D Cartesian Coordinates ................................................ 32
4.3 Model Numerical Test in 1D Cylindrical Coordinates ............................................. 36
4.4 Model Numerical Test in 2D Cylindrical Coordinates ............................................. 42
Chapter 5 : Conclusions and Future Work ....................................................................................47
5.1 Conclusions ............................................................................................................... 47
5.2 Future Work .............................................................................................................. 50
References .....................................................................................................................................51
Appendix A ...................................................................................................................................55
Appendix B ...................................................................................................................................60

vi
LIST OF TABLES
3.1 Radial location of thermocouples in the batch vessel .......................................................... 24
4.1 Sample results of u(x,t) for the first model ......................................................................... 30
4.2 The RMSE, MAE and CPT time for both u(x,t) and p(t) ..................................................... 32
4.3 Sample results of u(x,y,t) at t = T the second model ........................................................... 34
4.4 The RMSE, MAE and CPT time for both u(x,y,t) and p(t) ................................................... 34
4.5 Sample results of u(r,t) for TC2 and TC6 only ..................................................................... 38
4.6 The RMSE, MAE and CPT time for both u(r,t) and p(t) ...................................................... 39
4.7 Sample results of u(r,z,t) at t = T the fourth model ............................................................. 44
4.8 The RMSE, MAE and CPT time for u(r,z,t) ......................................................................... 44
B.1 The output results of u(x,t) for the first model, h= k =1/100, s =100 and T =1 ..................... 60
B.2 the output results of p(t) for first model, h= k =1/100, s =100 and T =1 ............................... 61
B.3 the output results of u(x,y,t) for the second model, h= 1/50, k =1/100, ................................ 62
B.4 the output results of p(t) for the second model, h= k =1/100, s =25 and T =1 ....................... 63
B.5 the output results of u(r,t) or (TC 2) for the third model, h= k =1/100 .................................. 64
B.6 the output results of u(r,t) or (TC 3) for the third model, h= k =1/100 ..................................... 65 B.7 the output results of u(r,t) or (TC 4) for the third model, h= k =1/100 .................................. 66
B.8 the output results of u(r,t) or (TC 5) for the third model, h= k =1/100 .................................. 67
B.9 the output results of u(r,t) or (TC 6) for the third model, h= k =1/100 .................................. 68
B.10 the output results of p(t) for the third model, h= k =1/100, ................................................ 69
B.11 the output results of u(r,z,t) for the fourth model, h= 1/100, k =1/100 ................................ 70
B.12 the lists output results of p(t) for fourth model, h= k =1/100, s =100 and T =1 .................. 71

vii
LIST OF FIGURES
3.1 The Crank–Nicolson computational molecule for 1D ......................................................... 14
3.2 Flow chart of the numerical routine written in MATLAB code for 1D Cartesian .............. 17
3.3 The Crank–Nicolson computational molecule for 2D ......................................................... 19
3.4 Flow chart of the numerical routine written in MATLAB code for 2D Cartesian .............. 22
3.5 Batch vessel for deposition with cooled vessel wall ........................................................... 24
3.6 Flow chart of the numerical routine written in MATLAB code for 1D cylindrical ........... 25
3.7 Flow chart of PDE Toolbox routine written in MATLAB for 2D cylindrical .................... 27
4.1 Surface plot of the numerical solution u(x,t) for the first model ........................................ 29
4.2 The numerical solution p(t) for the first model .................................................................... 30
4.3 ADE and PE of u(x,t) at t = T ............................................................................................... 31
4.4 ADE and PE of p(t) at all x ................................................................................................. 32
4.5 Surface plot of the numerical solution u(x,y,t) for the second model at y =0.5 .................. 33
4.6 The numerical solution p(t) for the second model ............................................................... 33
4.7 ADE and PE of u(x,y,t) for the second model ...................................................................... 35
4.8 ADE and PE of p(t) at all x and y ........................................................................................ 36
4.9 Surface plot of the numerical solution u(r, t) for the third model ........................................ 37
4.10 The numerical solution p(t) for the third model ................................................................. 38
4.11 The numerical solution u(r, t) for the TC2. ........................................................................ 39
4.12 The numerical solution u(r, t) for the TC6. ........................................................................ 40
4.13 ADE and PE of u(r, t) for the TC2...................................................................................... 40
4.14 ADE and PE of u(r, t) for the TC6...................................................................................... 41
4.15 Surface plot of the numerical solution u(r,z, t) for the fourth model.. ................................ 43
4.16 The numerical solution p(t) for the fourth model. .............................................................. 43
4.17 Comparison between the Crank-Nicolson and PDE toolbox solutions. ............................. 45
4.18 ADE and PE of u(r,z,t) for the fourth model. ..................................................................... 46

viii
NOMENCLATURE
f Heat source term
a Thermal coefficient
C Heat capacity term
p control parameter
u Parabolic solution
g Boundary condition
E Overspecification boundary condition
x0 Overspecification boundary condition coordinate in x-axis
y0 Overspecification boundary condition coordinate in y-axis
t Time
T Final time
h Step size in x direction
O Truncation error
k Step size in t direction
N Mesh grid in the t direction
l Iteration number
M Mesh grid in the x direction
uxx Second derivative of u with respect to x
uyy Second derivative of u with respect to y
p0 Initial guess of p
R Tridiagonal matrix coefficient
b Known system of equations coefficient
q Heat source
Greek Symbols
ρ Density
α Thermal conductivity
ϕxx Second derivative of the initial condition with respect to x
ϕyy Second derivative of the initial condition with respect to y
Ω Domain
Δ Amount of change
ϕ Initial condition

1
CHAPTER 1
INTRODUCTION
Over the past years, heat transfer parabolic inverse problems and numerical techniques
(finite difference methods) used to solve them have been increasing. In fact, this has been one of
the fastest growing areas in various application fields. The study of inverse problems plays an
important role today in applied mathematics and physics. This kind of problem also arises in
many other important applications areas such as mathematical models for population dynamics,
quasistatic theory of thermoelasticity, medical science, electrochemistry, control theory,
biochemistry, and certain biological processes [1]. For instance, it is challenging to perform
accurate measurement of the time-dependent blood perfusion through a certain region of tissue
under investigation [2]. Thus, models are often developed and tuned using experimental data to
identify the time-dependent perfusion from the inverse problem to overcome this difficulty.
Additional measurements are of course necessary to render a unique solution such as heat flux,
interior temperature, or mass measurements [3].
Several physical phenomena are modeled by a parabolic inverse problem with non-
classical boundary conditions. Such a boundary condition may appear as a temperature at a given
point x0 in the spatial domain at time t; in which case, the boundary condition is called point
overspecification boundary condition [4]. If the governing partial differential equation is used to
describe a heat transfer process where a source parameter exists, then the integral boundary
condition can be interpreted as a weighted thermal energy contained in a portion of the spatial
domain [5].
While many solutions for direct problems with standard boundary conditions have been
used, such as finite difference, finite element, finite volume, and boundary element methods,

2
there has been less research into the numerical approximation of inverse parabolic partial
differential equations (IPDEs) with overspecified boundary data. Finite difference methods are
known as the first techniques for solving IPDEs. Even though these methods are very effective
for solving various kinds of PDEs, some finite difference methods are known as unstable and are
restricted by the stability criteria. However, implicit schemes, such as the Crank–Nicolson, are
considered unconditionally stable based on the von Neumann stability analysis. Moreover, the
Crank–Nicolson has second order accuracy, which means less truncation error associated with
this method [6].
Few investigations are known in the literature that involve the inverse problem in
cylindrical coordinate systems. Additionally, after an extensive of the research, there is no
known validation for the existing computational models based on real experimental data or
validation data against other numerical methods such as the finite element method. Therefore,
the overall focus of this problem report was to model a parabolic inverse problem and validate
the results with an exact solution for selected examples. In addition, the computational model
created in this work was tested on cylindrical coordinate system.
1.1 Objective of the Study
The objectives of this study were, first, to solve a PDE as an inverse problem with use of
unconditionally stable and second-order accuracy scheme such as the Crank–Nicolson method.
Second, developing an advanced MATLAB computational code for approximation solutions of
one-dimensional (1D) and two-dimensional (2D) problem with heat source involved. To achieve
these goals, the following steps were pursued:

3
(1) Use an implicit finite difference scheme for 1D and 2D of heat equation with heat source
term involved. The Crank–Nicholson method is used for this purpose. In addition, use
non-classical boundary conditions: point overspecifcation conditions.
(2) Develop MATLAB code for both 1D and 2D problems.
(3) Validate the results with the analytical solution (Cartesian problems).
(4) Apply the developed code to cylindrical geometry.
(5) Validate the results with an experimental data and PDE toolbox (cylindrical problems).
1.2 Scope of this Work
In this problem report, Chapter 2 reviews the previous work on the development and
application of a different numerical scheme for solving the PDE and simultaneously determines
of two ingredients as an inverse problem. Chapter 3 describes the use of the Crank–Nicolson
finite difference method. In this chapter, the predictor-corrector method that is used to predict the
time-dependent heat source parameter is investigated.
Chapter 4 presents the numerical experiments and results of the Crank–Nicholson method
for 1D and 2D problems with non-classical boundary conditions. In addition, the Cartesian
problems MATLAB codes will used for cylindrical problems with necessary adjustments on the
boundary conditions of cylindrical geometry. All results and graphs are shown in this chapter.
Chapter 5 summarizes the conclusions and suggestions for future work. Some derivations
are appended in Appendix A. Appendix B lists all output results of the code to illustrate the
numerical results. The accompanying CD-ROM contains the source codes for 1D and 2D solver
for four models.

4
CHAPTER 2
LITERATURE REVIEW
Many mathematicians and engineers have been interested in solving parabolic inverse
problems. Consequently, several finite difference schemes for solutions to this type of problem
have been established. With the development of high-speed personal computers, it has become
more convenient to use numerical techniques to solve heat transfer inverse problems. This is
especially true for problems with non-classical boundary conditions. This literature review is
intended to provide a general background of some inverse problems, and in particular the
parabolic heat equation inverse problem for determination of the time-dependent heat source
control parameter in 1D and 2D inverse problems. For references regarding specific techniques,
readers should look at cited references to identify further relevant studies.
2.1 Direct and Inverse Problem
A complete mathematical description of a physical system allows the outcome of some
measurements to be predicted. The estimation of the measurement results is referred to either as
the modelization problem, the simulation problem, the forward problem, or the direct problem
[7]. There are many well-known methods to solve direct problems. For instance, the PDEs
describing the physical phenomena of heat conduction can be solved using exact and numerical
methods. The exact methods include the classical examples of separation of variables and
Laplace transforms. Furthermore, direct problems are considered well-posed problems and more
typical when modeling a physical system where the model parameters and material properties are
known. Hadamard suggested that a problem is well-posed if and only if the following properties
hold [8]:

5
A solution exists, at least one solution exists (existence);
The solution is unique, at most one solution exists (uniqueness);
The solution depends continuously on the data (stability); that is to say, do not
produce a wildly different result for very small change in the input data.
The inverse problem consists of using the actual result of some measurements to infer the
values of the parameters that characterize the system. According to many references in the recent
literature, it is commonly thought that most inverse problems are considered ill-posed [9, 10, 11].
Problem is said to be ill-posed if it fails to meet the properties provided by Hadamard. The ill-
posed problems contain errors. This means that a small error of measured data may result in an
unstable prediction, which results in estimates rather than actual results for a target property that
needs to be estimated. This maks the solution extremely sensitive to measurement errors.
2.2 Overview of Previous Work
Much research has been conducted on finding a control parameter in a one-dimensional
(1D) parabolic inverse using various numerical methods such as second-order explicit finite-
difference (FTCS), the second-order implicit finite-difference (BTCS) procedure, Crandall’s
formula, the Saulyev's first and second schemes, etc. the explicit schemes are very easy to
implement for this type of problems, but it will be restricted by the stability criteria and the step
size might be not good enough to archive good accuracy. In contrast, the implicit schemes are
difficult to implement, but they are often unconditionally stable where the step size can be
chosen without any limitation.

6
2.2.1 1D Parabolic Inverse Problem
There are many examples of inverse problem of identifying different ingredients of the
parabolic PDE, such as identifying unknown source term f(x,t,) [14, 15, 16], unknown thermal
coefficient a(t) [17, 18], and unknown capacity term C(u) [19]. This review is intended to limit
to models with an estimation of control parameter p(t). Some of them are discussed below
),(),()(),()(),()( txftxutptx
x
uta
xtx
t
uuC
,10 x ,0 Tt
(2.1)
subjected to the given initial and boundary condition,
)()0,( xxu ,10 x
(2.2)
)(),0( 1 tgtu ,0 Tt
)(),1( 2 tgtu ,0 Tt
with overspecification at a point in the spatial domain,
(2.3)
)(),( 0 tEtxu ,0 Tt (2.4)
or integral overspecification over a portion of the spatial domain,
),(),()(
0
tEdxtxuts
,0 Tt ,1)(0 ts
(2.5)
Where C(u), a(t), f, g0, g1, ϕ , and E are known functions, while u and p are unknown solutions.
The problem (2.1)–(2.4) can model certain types of physical problems where (2.1) can be
used to describe a heat transfer process with a source parameter present. As an example, (2.4)
represents the temperature measured by an actual sensor at a given point x0 in a spatial domain at
time t. Thus the purpose of solving this inverse problem is to identify the source parameter that
will produce at each time t a desired temperature at that point [4, 20].

7
Cannon and his co-workers paid a lot of attention to the numerical treatment of this
problem. They demonstrated the existence and uniqueness of a smooth global solution pair (u, p)
which depends continuously upon the data under some certain assumptions [21]. Cannon and Lin
extended the investigation to quasilinear parabolic equations [22]. However, because of the
restriction of the method they used, only local solutions were obtained. Later, they presented a
new approach to demonstrate the existence of the global solution of (2.1) by transforming the
nonlinear equation. They also studied using a backward Euler scheme via a transformation of (u,
p) to (v, r) to eliminate the term p(t)u which led to transfer the semi-linear PDE to a linear PDE.
In addition, they investigation of the convergence of u with the convergence order of
and of p with the convergence order of ( / ) when [23]. A numerical scheme for a
similar problem, in which the upper limit of the integration s(t) is a function of time, has been
studied by Cannon and Matheson and they have also discussed the convergence as well [21].
Recently, Dehghan has done extensive research on inverse problem parameter
estimations and presented several numerical methods for the inverse problems similar to (2.1)–
(2.5) in 1D and 2D problems. He introduced the (1,3) and (1,5) FTCS, the (3,1) BTCS)
procedure, (3,3) Crandall’s formula, and the (2,2) Saulyev's first and second kind formula. His
algorithms were tested on two problems and were seen to produce good results and suggest
convergence to exact solution when h goes to zero [6, 24, 25]. A more general and complex
numerical treatment of the control parameter estimation has been developed by the same author
[26]. He introduced the θ-method or weighted finite difference formula, which was based on the
modified equivalent PDE as described by Warming and Hyett [27].
Methods based on the meshless property of multiquadric (MQ) quasi-interpolation, and
moving least-square (MLS) approximation are found to be an alternative to the traditional mesh

8
dependent techniques such as FTCS, BTCS, Crandall, and Saulyev etc. Min and Zong-Min
proposed the MQ quasi-interpolation method for solving 1D parabolic equation with both point
overspecified data and integral overspecification. In their scheme, the spatial derivatives of the
equations were approximated by the derivatives of MQ quasi-interpolation, while a simple
forward difference to the dependent variable derivatives. They also introduced a polynomial as
an effective technique in MQ quasi-interpolation schemes. Later in their paper, it was noticed
that with the introduced polynomial, some terms of the parabolic equation disappeared, and their
roles are represented implicitly by the polynomial [28].
Cheng presented a technique based on the moving MLS approximation for finding the
solution of problem (2.1)-(2.4). He used MLS approximation for discretization of both time and
space variables. Several numerical examples were introduced in this paper showing that the
methods are convergent with good accuracy. The author mentioned that meshless methods allow
to solve problems with non-regular geometry as compared to other numerical methods based on
meshes in which the regularity of the geometry is necessary [29].
2.2.2 2D Parabolic Inverse Problem
The 1D parabolic control parameter inverse problem with one demission in space x, can
be extended to 2D inverse problem as follows:
),,(),,()(),,(),,()(),,()(
2
2
2
2
tyxftyxutptyxy
utyx
x
utatyx
t
uuC
,10 x ,10 y ,0 Tt
(2.6)
subjected to the given initial and boundary condition,
),,()0,,( yxyxu ,1,0 yx (2.7)

9
),(),,0( 1 tgtyu ,10 t
)(),,1( 2 tgtyu ,10 t
),(),0,( 1 thtxu ,10 t
)(),1,( 2 thtxu ,10 t
with an additional overspecification condition,
(2.8)
)(),,( 00 tEtyxu ,0 Tt
(2.9)
or integral overspecification over a portion of the spatial domain,
),(),,(0 0
tEdydxtyxua b
,0 Tt ,1,0 ba (2.10)
Several numerical methods have been developed to deal with problems similar to (2.6)-
(2.9) that may not have analytical solutions, or situations during which such solutions become
difficult to obtain.
The theoretical discussion is fully addressed in early work by Wang. He investigated the
solvability of parameter estimation p(t) by introducing two different non-classical boundary
conditions. He also introduced a pair of transformations that led to transfer the semi-linear PDE
to a linear PDE in order to overcome the difficulty of p(t) estimation, and to eliminate the term
p(t)u, which is implicitly composed in r(t) function. A tridiagonal system was produced as result
of using a finite difference approach. Wang mentioned that the point overspecifcation is much
slower than energy overspecification. This is due to the fact that the iteration process was quite
oscillatory. However, the numerical experiments show satisfactory results in comparison to the
exact solution for selected problems [30].

10
Various numerical methods such as the Sinc-Collocation Method [31], the (1, 5) fully
explicit scheme, the Noye–Hayman (5, 5) fully implicit method, the (3, 9) ADI method [32],
were applied to compute the control parameter in the 2D inverse problem. However, each
method mentioned above has some sort of advantage and disadvantage. For instance, explicit
methods are considered simple to implement, but due to their stability requirement, the time
increment will be restricted by the stability criteria. On other hand, implicit methods are
considered stable, these techniques use an extensive amount of computation time compared to
the explicit methods for the same selection of values s and h. For more detail on these
methods, we refer the reader to the above sources and the references therein.
2.3 Application of Control Parameter Inverse Problem
Many physical situations might be modeled by (2.1)-(2.3) with (2.4) or (2.5). Problems of
these types can also arise from laser material treatments. HÖmberg and Yamamoto investigated
the controllability on a curve for a semi-linear parabolic equation of a laser heat treatment under
observed temperature. Therefore, they proposed the heat equation similar to (2.1)-(2.4) in order
to evaluate the temperature u and the laser power p(t). They also showed that their theory
confirms the application of PID-control to their experiment and provided numerical simulations
for a PID control of laser hardening. Moreover, they tested their approach on an industrial case
study which was presented confirming the practical applicability of using inverse problem
modeling [33].
Furthermore, application of control parameter inverse problem can also arise in the
medical field. For instance, it is important to maintain an accurate estimation of both the
temperature and the blood perfusion of tissue under investigation, and this task could be

11
performed before or during a surgical intervention as well as in other termo-regulatory tests.
Therefore, these types of tests could disturb the tissue to be measured, and allow for the
possibility of infection [3]. Previously, the blood perfusion was assumed a constant, and has
already been investigated for both numerical and analytical analyses. However, the blood
perfusion coefficient is the function of time in all the regions of the body, and for this reason
treating this physical phenomena as an inverse problem will lead to more accurate estimations.
Trucu et al has investigated the identification of the time-dependent perfusion coefficient in the
transient bio-heat conduction equation. They succeeded in developing a general numerical
method that would estimate both the temperature and the blood perfusion for different types of
boundary conditions and measurements [2].

12
CHAPTER 3
THE NUMERICAL TECHNIQUE
Now consider the numerical solution of the inverse problems (2.1) – (2.4) for 1D and
(2.6) – (2.9) for 2D. The approximation for the function of u(x,t) and u(x,y,t) is attempted in 1D
and 2D respectively. In addition, the time-dependent function p(t) for both problems will be
evaluated based on prediction-correction method that has been described in detail elsewhere [5,
6]. The overestimation boundary is necessary for these problems. Therefore, those models will
examine point overspecification boundary condition as an additional boundary condition. This
Chapter provide insights details of the algorithm procedure and application of the Crank–
Nicolson method for solving this type of problems.
3.1 Crank–Nicolson Finite Difference Method
The explicit methods are considered to be a computationally simple and easier to
program but, due to the stability requirement, the time increment will be restricted by the
stability criteria. Alternatively, the Crank–Nicolson scheme is considered implicit and stable. It
can be proven that the Crank-Nicolson method is stable and converges for all values of
[Δt/(Δx)2]. In addition, it has second order accuracy and its truncation error is of the order of
[(Δx)2 + (Δt)2] [34]. However, the Crank–Nicolson scheme involves additional computation. If N
represents the internal grid points over a region, then this method involves the solution of N
simultaneous algebraic equations for each time step. The Crank–Nicholson scheme has been
chosen as the computational scheme in this work, due to properties of the stability and the
accuracy of the scheme. Todays’ computers are much powerful so computational time will be
minimized significantly.

13
3.2 1D Inverse Problem with Point Overspecification
The following section considers the numerical solution of the inverse problem (2.1) –
(2.4). Suppose the approximation of u(x,t) and p(t) at the nth level, n = 0, 1, …, are defined, the
computation procedure starts by assigning an appropriate initial guess to p(t) for the (n+1)st
level. If the solution satisfies the overspecified boundary conditions (2.4) within a prescribed
tolerance , then the corresponding values of u(x,t) and p(t) will be accepted and move to the next
time increment level. Otherwise, p(t) will be continuously updated as a new guess. Thus the
computation will be repeated with the new guess p(t +l), l = 1,2, …, where l is the iteration
number.
The working domain is defined by [0, 1] × [0, T]. If by representing the number of mesh
grid in the x direction as M and in the t direction as N, the step size would be h = 1/M, and k =
T/N, respectively. The grid points (xi , tn) are defined by
, 0,1,2,… . , , (3.1)
, 0,1,2, … , , (3.2)
Applying the implicit Crank–Nicolson scheme to (2.1), the following finite difference working
formula results:
][
2
1)(
1 12
1 ni
ni
ni
ni uu
huu
k
))((4
1 11 ni
ni
nn uupp
)(2
1 1 ni
ni ff , ,10 Mi 10 Nn
(3.3)
Where,
)1
21
( i
ui
ui
ui
u
The computational molecule of the Crank–Nicolson computational molecule for 1D is
given in figure 3.1.

14
Figure 3.1 The Crank–Nicolson computational molecule for 1D.
An (M-1) x (M-1) linear system of equations is obtained by rewriting the resulting system
into matrix form. All details concerning the derivations of R and b1 to bM-1 are appended in
appendix A.
)(1 nUBnAU
(3.4)
1
2
2
1
11
12
12
11
100
110
0011
001
M
M
nM
nM
n
n
b
b
b
b
u
u
u
u
R
R
R
R
1,2,… , 2 (3.5)
3.3 The Prediction-Correcting Mechanism for 1D Problem
Up to this point, it can be noticed that B vector is a function of un only. Thus, every term
in the right hand side of (3.5) should be known. The A matrix has one term p(t) which is
unknown and that needs to be given as an initial guess to start the computation. Therefore, the

15
prediction-correction mechanism for p(t) is demonstrated in this section. Notice that, if u(x,t) and
p(t) are a solution for (2.1) – (2.4), then,
nxx
n
xx
E
txftxuEtp
or
txftEtptxutE
),(),()()(
),,()()(),()(
00
00
(3.6)
(3.7)
A few assumptions need to be addressed before preceding to the next equation. It was
assumed that f = f(x, t, u, ux, q) is a smooth function with respect to all of its variables, and f ≥ 0.
The compatibility condition is satisfied on ∂Ω x 0 by the data and ϕ(x0) = E (0) > 0 [5]. Thus,
the finite difference form of (3.7) can be rewritten as,
n
nk
nk
nk
nk
nn
E
fuuuhEp
)2)(1()( 11
2)(
(3.8)
Then po and u(x,t) at n = 0 level given by the initial condition provides a starting point for
the computations. Substituting the compatibility conditions into (3.7), results
)(
),()()0(
0
00)0(
x
txfxEp xx
(3.9)
Notice that the step size is very small. Therefore, this will lead to to assume that pn+1 is
not far from pn. Thus, it is reasonable to choose of the initial guess for pn+1 = pn, n = 0, 1, 2…, N
[6]. The pn and pn+1 can be substituted into (3.5) which will make the linear system ready to
solve. The above equations have a coefficient matrix that is tridiagonal; therefore, Thomas
algorithm can be used for block tridiagonal matrices to get the solutions [35].
The results that obtained are ui n+1, i = 1, 2,…M-1, corresponding to pn+1(0). If pn+1(l)
represents the lth guess for p(t) at n+1 level, then ui n+1(l) represents the corresponding values

16
obtained by using pn+1(l), n = 1,2,…, N-1, l = 0,1,2,… . As result, the (3.8) can be used to
construct pn+1(l+1) as follows
1
1)(11
)(1)(11
21)1(1 )2)(1()(
n
nk
lnk
lnk
lnk
nln
E
fuuuhEp ,.......1,0l (3.10)
Then pn+1(l) will be adjusted continuously until it converges at a prescribed tolerance.
Then the corresponding values ui n+1(l) i = 1,2,…,M-1, and pn+1(l) as ui n+1, i = 1,2,…,M-1 and pn+1
are accepted. This completes computations from level n to n+1. The following chapter presents a
numerical example to show how this algorithm works and to validate it with the exact solution
for a selected problem. In addition, this algorithm will be tested on cylindrical coordinate system
by using experimental data provided by Bidmus [36].The numerical routine based on MATLAB
(R2014a) code, as one described in the flow chart of figure 3.2 and the pertinent details of each
block of the flowchart are provided below.

17
Figure 3.2 Flow chart of the numerical routine written in MATLAB code for 1D Cartesian.
M N T L x0 h k s
k0 BC1 BC2 IC f E
Total number of h ( x increment ) Total number of k ( t increment ) Total Time of t Total length of x Overspecification grid point x increment t increment Stability condition the step size at given x0 Boundary condition at x = 0 Boundary condition at x = 1 Initial condition at t = 0 Heat source E function in Eq. 2.9
Start
Inputs: M, N, T, L, x0
Yes
No
Calculate; R, b1, bM-1, bi. (See Appx. A)
For the linear system Eq. (3.5)
Solve the linear system Eq. (3.5) using Thomas algorithm, un+1
| p(l+1)-p(l)|≤ h3
Calculate: h, k, s, k0
BC1, BC2, IC, f, E
Initial guess:
p0 = p(n+1, l) using Eq. (3.9)
Calculate; p (n+1, l+1) using Eq. (3.10)
Save, un+1 and p(n+1, l+1)
Post the results
End
Update p(n+1,m) = p(n+1, m+1)

18
3.4 2D Inverse Problem with Point Overspecification
The purpose of solving 2D inverse problem numerically is to recover the source
parameter that will produce a desired temperature at each time t at a specific location (x0, y0). In
this section, the Crank–Nicolson is used for computing the numerical values of u(x,y,t) and p(t)
simultaneously. The procedure that was mentioned in [30], will be followed to solve the 2D
model equation (2.6) – (2.9).
The first step is to divide the working domain to [0, 1]2 × [0, T] into M2 × N mesh with
step size h = Δx = Δy = 1/M and time step size k = Δt = T/N. The grid points (xi, yi, tn) are
defined by
, 0,1,2,… . , , (3.11)
, 0,1,2,… , , (3.12)
The direct application of Crank–Nicolson scheme to 2D problem (2.6) leads to the
following finite difference working formula:
][
2
1)(
1,
1,2,
1,
nji
nji
nji
nji uu
huu
k ))((
4
1,
1,
1 nji
nji
nn uupp
)(2
1,
1,
nji
nji ff ,1,0 Mji 10 Nn
Where,
),
41,1,,1,1
(, ji
uji
uji
uji
uji
uji
u
Equation (3.13) also can be rewritten as:
jibn
jiun
jiun
jiun
jiun
jiRu
,)1
1,1
1,1,1
1,1
(1,
(3.13)
(3.14)

19
Figure 3.4 shows the computational molecule of the Crank–Nicolson computational
molecule for 2D problem.
Figure 3.3 The Crank–Nicolson computational molecule for 2D.
To begin, the resulting system of equations described by (3.14) can be written into matrix
form. This results an (M-1) × (M-1) linear system of equations, and contain unknowns
1,....,2,1,,1, Mjinu ji . All details concerning the derivations of R and b1 to bM-1 are
appended in appendix A.
)(1 nUBnAU (3.15)
1,1
1,2
2,1
1,2
1,2
1,1
11,1
11,2
12,1
11,2
11,2
11,1
10010......0
110010...
0110010
00110010
10011001
01001100
...100110
...010011
0......01001
MM
MM
M
nMM
nMM
n
nM
n
n
b
b
b
b
b
b
u
u
u
u
u
u
R
R
R
R
R
R
R
R
R
(3.16)

20
The linear system of equations is difficult to solve for this problem. The coefficients
matrix A produced by (3.15) are usually a large and sparse matrix with (1-M)2, which cannot be
handled easily. However, the successive over-relaxation (SOR) method will be used to solve the
system of equations. For more details about this method, readers are referred to.
3.5 The Prediction-Correcting Mechanism for 2D Problem
The predictor-corrector method is quite similar to what have done for 1D problem in
section (3.3). The prediction-correction mechanism for p(t) is demonstrated and how to use it
with the linear system (3.16). If u(x,,y t) and p(t) are a solution for (2.6) – (2.9), then
nyyxx
n
yyxx
E
tyxftyxutyxuEtp
or
tyxftEtptyxutyxutE
),,()],,(),,([)()(
),,,()()(),,(),,()(
000000
000000
(3.17)
(3.18)
Again, the assumptions that have been introduced in section (3.3) hold for this problem.
Thus, the finite difference form of (3.17) can be rewritten as:
n
nk
nlk
nn
E
fuhEp
,
2)( )1()(
(3.19)
If the compatibility conditions substituted into (3.17), it results
),(
),,()],(),([)0(
00
000000)0(
yx
tyxfyxyxEp yyxx
(3.20)
Both po and u(x,y,t) at n = 0 level is given by the initial condition provide a starting point
of the computations. For practical computation, however, the step size is very small. Therefore,

21
this will lead to assume that pn+1 is close to pn. Thus, it is reasonable to choose the initial guess
for pn+1 = pn, n = 0, 1, 2…, N. Substitute pn and pn+1 into (3.15), it will make the linear system
ready to solve. The SOR method described earlier will be used to solve the system of equations.
The results obtained are ui,j n+1, i,j = 1, 2,…M-1, corresponding to pn+1(0). If pn+1(l) represents the
lth guess for p(t) at n+1 level, then ui,j n+1(l) represents the corresponding values obtained by
using pn+1(l), n = 1,2,…, N-1, l = 0,1,2,…. As result, the (3.19) can be used to construct pn+1(m+1)
as follows
,.......1,0
)1()(1
1,
)(1,
21)1(1 0000
lE
fuhEp n
nji
lnji
nln
(3.21)
Where,
),
41,1,,1,1
(, 000000000000 ji
uji
uji
uji
uji
uji
u
The algorithm will adjust pn+1(m) continuously until it converges and satisfies the
prescribed tolerance. Then the corresponding values ui,j n+1(m) i,j = 1,2,…,M-1, and pn+1(m) as ui,j
n+1, i,j = 1,2,…,M-1 and pn+1 are accepted respectively. Now, the computaions are completed
from level n to n+1. The results of the 2D algorithm are discussed with the exact solution for a
selected problem in the chapter 4. Moreover, this algorithm is tested on a cylindrical coordinates
system by using solution data generated by the PDE Toolbox (R2014a). The numerical routine
based on MATLAB (R2014a) code, as one described in the flow chart of figure 3.2 is
summarizes the algorithm. The pertinent details of each block of the flow chart are provided
below.

22
Figure 3.4 Flow chart of the numerical routine written in MATLAB code for 2D Cartesian.
M N T L x0
y0 h k s
k0 BC1 BC2 BC3 BC4 IC f E
Total number of h ( x increment ) Total number of k ( t increment ) Total Time of t Total length of x Overspecification grid point in x direction Overspecification grid point in y direction x increment t increment Stability condition The step size at given x0 Boundary condition at x = 0 Boundary condition at x = 1 Boundary condition at y = 0 Boundary condition at y = 1 Initial condition at t = 0 Heat source E function in Eq. 2.9
Start
Inputs: M, N, T, L, x0, y0
Yes
No
Calculate; R, bi,J. (See Appx. A)
For the linear system Eq. (3.15)
Solve the linear system Eq. (3.15) using SOR method, un+1
| p(l+1)-p(l)|≤ h3
Calculate: h, k, s, i0, j0
BC1, BC2, BC3, BC4, IC, f, E
Initial guess:
p0 = p(n+1, l) using Eq. (3.20)
Calculate; p (n+1, l+1) using Eq. (3.21)
Save, un+1 and p(n+1, l+1)
Post the results
End
Update p(n+1,m) = p(n+1, m+1)

23
3.6 Application of Inverse Problem to Cylindrical Coordinates
In this section, the inverse problem for a generalized heat equation in cylindrical
coordinates is considered. The main goal in this section is an extension of the 1D inverse
problem model in Cartesian coordinates in section (3.2), to 1D inverse problem in cylindrical
coordinates. This can be done by adjusting the boundary conditions so that the model output
results can satisfy and mimic the real experimental data of a selected cylindrical problem. Recall
that the simplest form of the 1D heat equation in cylindrical coordinate (r, t) is
),(),()(),(1
),( trftrutptrr
ur
rrtr
t
u
, ,10 r ,0 Tt
(3.22)
subjected to the given initial and boundary condition,
)()0,( rru ,10 r
(3.23)
)(),0( 1 tgtu ,0 Tt
)(),1( 2 tgtu ,0 Tt
with overspecification at a point in the spatial domain,
(3.24)
)(),( 0 tEtru ,0 Tt (3.25)
3.6.1 1D Cylindrical Coordinate “Batch Vessel with Wall cooling” [36]
Bidmus’ experiment “Batch Vessel with Wall cooling” is a good example to validate the
1D inverse problem in cylindrical coordinates. This experiment was used to investigate the wax
deposition that occur under static cooling conditions. It consisted of a cylindrical vessel made of
copper, with a 4 inch inside diameter and 6 inches in height. In addition, there were two
temperature-regulated baths for maintaining the temperatures of the wax-solvent mixture and the
coolant. The hot medium was a wax-solvent mixture, and the cold surface was the vessel wall.
Therefore, thermal energy was radially dispersed outward to the cold vessel wall. In order to

24
measure the temperature history during the experiment, 7 pre-calibrated thermocouples were
used inside the cylindrical vessel at different radial locations [36].
Figure 3.5 shows the schematic for the vessel for deposition with static cooling. The
thermocouples are labeled TC l to TC7 based on their distances from the surface (or the vessel
wall). In addition, the Fractional radial distance of the thermocouples are listed in table 3.1.
Table 3.1 Radial location of thermocouples in the batch vessel [36].
Figure 3.5 Batch vessel for deposition with cooled vessel wall [36].
Fractional radial distance
Thermocouple number distances from vessel wall distances from vessel center
TCl 0.125 0.875 TC2 0.188 0.812 TC3 0.250 0.750 TC4 0.313 0.687 TC5 0.375 0.625 TC6 0.750 0.250 TC7 1.000 0.000

25
Figure 3.6 Flow chart of the numerical routine written in MATLAB code for 1D cylindrical.
Start
Inputs: M, N, T, L, x0
Yes
No
Calculate; R, b1, bM-1, bi. (See Appx. A)
For the linear system Eq. (3.5)
Solve the linear system Eq. (3.5) using Thomas algorithm, un+1
| p(l+1)-p(l)|≤ h3
Calculate: h, k, s, k0
BC1, BC2, IC, f, E
Initial guess:
p0 = p(n+1, l) using Eq. (3.9)
Calculate; p (n+1, l+1) using Eq. (3.10)
Save, un+1 and p(n+1, l+1)
Post the results
End
Denormalized Data TC1-TC7, [Co]
Compare to Bidmus’s Exp. Data
Data Preparation
Update p(n+1,m) = p(n+1, m+1)
Load the Bidmus’s Exp. Data
TC1-TC7, [Co]
Normalize the data, 0-1.
Use scaledata M-file.
Choose TC5 = E(t) as Overspecification B.C
Find a fitting function for E(t)
Use createFit_Tc5 M-file

26
3.6.2 2D Cylindrical Coordinates Using PDE Toolbox
The PDE Toolbox is a tool for the study and solution of PDEs in two space dimensions
and time. The PDE toolbox solver uses an algorithm based on the Finite Element Method for
problems defined on bounded domains in the plane. In addition, PDE toolbox is capable of
solving the direct heat transfer PDE in a cylindrical system as a function of time. Thus, the main
goal of using the PDE toolbox is to generate data, in which can be used with the 2D inverse
problem model.
Recall that the heat equation PDE in a cylindrical coordinate system (r,z,t) is
rqTtrpz
Tkr
zr
Tkr
rt
TCr
)()()( in Ω
(3.26)
where ρ, C, and k are the density, specific heat, and thermal conductivity of the material,
respectively, T is the temperature, p is the control parameter as function of time only, and q is the
heat generated in the cylindrical.
The PDE toolbox accepts the equations in a Cartesian system. Thus, to solve the
parabolic equation a cylindrical system, the PDE needs to be expressed in a Cartesian form so
that PDE Toolbox solver can recognize.
futpuct
ud
)()( in Ω
(3.27)
The equation (3.26) can be converted to a form that supports the PDE Toolbox after
multiplying by r, defining r as y, and z as x. Thus, rewriting (3.26) equation gives:
yfutypuyt
uy
)()( in Ω
(3.28)
The main steps for solving the direct problem (3.28) using the PDE toolbox are
mentioned in detail, and appended in appendix A. Figure 3.7 shows a block diagram of the PDE

27
Toolbox code, and summarize all steps need to be done in order to generate the data that later
will be used to solve the 2D inverse problem.
Figure 3.7 Flow chart of PDE Toolbox routine written in MATLAB for 2D cylindrical.
Pass the E(t) to 2D Inverse Problem Model, Fig. 3.4
Save the PDE Toolbox Solution
Choose (xo, yo) on The Rectangular Grid Solution
Save The Solution at (xo, yo)
Interpolate to Rectangular Grid Solution
Save the Best Fitting Model, E(t) as Overspecification B.C
Call the Fitting Toolbox
Triangular-Rectangular Grid Interpolation Code
Fitting Code
PDE Toolbox Code
Start
The PDE Toolbox
Define a 2-D Geometry
Define Boundary Conditions
Define PDE Coefficients
Generate Mesh
Define Initial Values & Total Time
Solve the PDE
Post Results
End

28
CHAPTER 4
MODEL VALIDATIONS AND DISCUSSIONS
In this Chapter, four numerical tests based on the Crank-Nicolson method are provided.
A selection of sample results of the numerical experiments with those models are given in the
form of some figures and tables. For interested readers, the complete results data are also
provided in Appendix B.
In this computational model, such a scheme would be evaluated based on some error
criteria. The root mean squared error (RMSE), the absolute error difference (AED), the
percentage error (PE), and the maximum absolute error (MAE) are used for both u and p in order
to assess the effectiveness of each model and its ability to make precise predictions. The RMSE
calculated by
I
UnUaRMSE
I
i jiji
1
2,, )(
the AED calculated by
(4.1)
jiji UnUaAED ,,
also, the PE is defined by
(4.2)
100
)(
,
,,
ji
jiji
Ua
UnUaPE
(4.3)
where Uai,j is the analytical solution at node i and time j, Uni,j is the numerical solution at node i
and time j, and I is the number of inner nodes (not including the boundary nodes).
The MAE is defined as the maximum value of the AED between the exact solutions and
numerical solutions at all inner nodes.

29
4.1 Model Numerical Test in 1D Cartesian Coordinates
In this section the solution to the 1D inverse problem is solved on the interval Ω = [0, 1].
The following example illustrates the result obtained in sections 3.2 and 3.3
)sin)(cosexp(])1([)( 222 xxttutpuu xxt
With boundary conditions
(4.4)
),exp(
),exp(2
2
21
tg
tg
initial condition
(4.5)
,sincos)( xxx
and overspecified condition
(4.6)
)exp(2)( 2ttE
(4.7)
The exact solution for u(x,t) and p(t) are:
2
2
1)(
),sin)(cosexp(),(
ttp
xxttxu
(4.8)
The parabolic solution u(x, t) is shown in figure 4.1, and the figure 4.2 shows the
numerical solution of p(t) to the first example.
Figure 4.1 Surface plot of the numerical solution u(x,t) for the first model.
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1-1
0
1
xt
un(x
,t)
-0.5
0
0.5
1

30
Figure 4.2 The numerical solution p(t) for the first model.
The sample results obtained for at the final time T = 1.0, computed for step size h= k
=1/100, and s = 100 using the Crank-Nicolson methods, are listed in table 4.1.
Table. 4.1 Sample results of u(x,t) for first model.
x u Ex. u Theo. AED PE
0.0 0.367879 0.367879 0.000000 0.000000 0.1 0.463555 0.463624 0.000069 0.014898 0.2 0.513855 0.513974 0.000119 0.023199 0.3 0.513855 0.514003 0.000149 0.028922 0.4 0.463555 0.463713 0.000157 0.033966 0.5 0.367879 0.368027 0.000148 0.040194 0.6 0.236193 0.236317 0.000124 0.052416 0.7 0.081387 0.081477 0.000091 0.111360 0.8 -0.081387 -0.081332 0.000055 0.067106 0.9 -0.236193 -0.236171 0.000022 0.009452 1.0 -0.367879 -0.367879 0.000000 0.000000
As it is illustrated in table 4.2, the RMSE and MAE indicate the discrepancy between the
exact and numerical values. The lower the RMSE and MAE, the more accurate the prediction.
These results show that the 1D inverse problem model is able to produce a good prediction. The

31
far right column of table 4.2 represents the computational process time (CPT) utilized in
determining the numerical solution.
Table 4.2 The RMSE, MAE and CPT time for both u(x,t) and p(t)
RMSE of u MAE of u RMSE of p MAE of p CPT[seconds]
0.000046 0.000157 0.0280020 0.003240 0.797731
Figure 4.3 displays the ADE on the left y-axis and PE on the right y-axis for the
numerical solution u(x,t) at the final time T. As it is observed, the mismatch between the exact
and the numerical starts at zero and then increases for the interval of, 0 < x < 0.4. The absolute
difference error decreases for x > 0.4 until it reach zero again. This is due to the fact that at x = 0
and x = 1, the same boundary conditions are used for solving the exact and numerical problems.
The percentage error for this test is found to be within the range -0.42 to 0.47.
Figure 4.3 AED and PE of u(x,t) at t = T.
Figure 4.4 represents the AED on the left y-axis and PE on the right y-axis for the
numerical solution p(t) for all values of x.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5
2
2.5x 10
-4
x
AD
E o
f u
-0.5
-0.3
-0.1
0.1
0.3
0.5
PE
of
u

32
Figure 4.4 ADE and PE of p(t) at all x.
4.2 Model Numerical Test in 2D Cartesian Coordinates
The 2D inverse problem is solved on the interval Ω = [0, 1] × [0, 1]. In order to illustrate
the result obtained in sections 3.4 and 3.5, consider the following example
)2(
4sin)exp()5
16
5()( yxttutpuuu xxxxt
With boundary conditions
(4.9)
,4
sin)exp(
,4
sin)exp(
0,
,0
xtg
ytg
x
y
),2(4
sin)exp(
),21(4
sin)exp(
1,
,1
xtg
ytg
x
y
initial condition
(4.10)
),2(
4sin),( yxyx
and overspecified condition
(4.11)
)2.0,4.0(),(),2.0sin()exp()( 00 yxttE
(4.12)
The exact solution for u(x,t) and p(t) are:
,51)(
),2(4
sin)exp(),,(
ttp
yxttyxu
(4.13)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5
2
2.5
3
3.5
x 10-3
t
AD
E o
f p
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
PE
of
p

33
The algorithm obtained in sections 3.4 and 3.5 for the 2D inverse problem is
implemented. Figure 4.5 shows the output u(x,y,t) produced by the Crank-Nicolson scheme with
a step size h= 1/50, k =1/100, and s = 25. The parabolic solution obtained for , at y = 0.5
and at final time t = T.
Figure 4.5 Surface plot of the numerical solution u(x,y,t) for the second model.
The numerical solution of p(t) is plotted graphically in figure 4.6. As it is shown, this is a
linear equation between the p(t) and time t which confirms the exact solution of p(t) in (4.13).
Figure 4.6 the numerical solution p(t) for the second model.
00.2
0.40.6
0.81
0
0.2
0.4
0.6
0.8
10.5
1
1.5
2
2.5
3
tx
u(x,
y,t)
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 11
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
t
p(t)
p(t)

34
The sample results obtained for , at the final time T = 1.0, computed for a step size h=
1/50, k =1/100, and s = 25 using the Crank-Nicolson methods, are listed in table 4.3.
Table 4.3 Sample results of u(x,y,t) at t = T the second model
x y u Ex. u Theo. AED PE
0.0 0.0 0.000000 0.000000 0.000000 NaN 0.1 0.1 0.634570 0.634328 0.000242 0.038122 0.2 0.2 1.234074 1.233271 0.000804 0.065117 0.3 0.3 1.765383 1.763930 0.001453 0.082318 0.4 0.4 2.199136 2.197145 0.001992 0.090561 0.5 0.5 2.511365 2.509095 0.002270 0.090383 0.6 0.6 2.684815 2.682608 0.002207 0.082199 0.7 0.7 2.709902 2.708100 0.001802 0.066490 0.8 0.8 2.585240 2.584097 0.001143 0.044210 0.9 0.9 2.317716 2.317295 0.000421 0.018174 1.0 1.0 1.922116 1.922116 0.000000 0.000000
Table 4.4 shows the RMSE and MAE for both u(x,y,t) and p(t) of the second model.
Although the second model can be able to produce a good prediction based on the lower values
of RMSE and MAE, the first model is more accurate in estimating the numerical solution. This is
due to the fact that the local truncation error associated with the approximation of u in 1D model
((Δx)2 + (Δt)2), is less than 2D model ((Δx)2 + (Δy)2 + (Δt)2). The far right column of table 4.4
represents the CPT utilized in determining the numerical solution.
Table 4.4 The RMSE, MAE and CPT time for both u(x,y,t) and p(t)
RMSE of u MAE of u RMSE of p MAE of p CPT [seconds]
0.000370 0.00229 0.055328 0.013215 6.738269

35
The plots (a), (b), and (c) in figure 4.7 show AED and PE for a selected y coordinates. As
it is shown, both AED and PE are zero at the boundaries where x = 0 and x = 1. This is a natural
result due to use the same boundary conditions in both exact and numerical solutions. However,
the maximum absolute error that can be defined by the peak point on the blue curve is increased
on figure 4.7 (b) at y = 0.5, then decreased on figure 4.7 (c) at y = 0.8. This is due to the
numerical error occurs most often at points far from the boundary (y = 0.5).
Figure 4.7 The ADE and PE of u(x,y,t) for the second model.
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2
2.5x 10
-3
(a) ADE and PE for u(x,y,t). y = 0.2 and t = T
x
AD
E o
f u
0
0.02
0.04
0.06
0.08
0.1
PE
of u
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2
2.5x 10
-3
(b) ADE and PE for u(x,y,t). y = 0.5 and t = Tx
AD
E o
f u
0
0.02
0.04
0.06
0.08
0.1
PE
ofu
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2
2.5x 10
-3
(c) ADE and PE for u(x,y,t). y = 0.8 and t = T
x
AD
E o
f u
0
0.02
0.04
0.06
0.08
0.1
PE
of u

36
Figure 4.8 represents the ADE on the left y-axis and PE on the right y-axis for the
numerical solution p(t) for all values of x. Notice that the error grows as the time increases due to
accumulation of the error during the numerical computations.
Figure 4.8 The ADE and PE of p(t) at all x, and y.
4.3 Model Numerical Test in 1D Cylindrical Coordinates
For the purpose of examining the 1D cylindrical model validity, the numerical techniques
outlined in section 3.4 are now applied to solve a specific problem of Bidmus’ experiment. This
problem is solved on the interval Ω = [0, 1] × [0, 1] for r, and z. The axisymmetric heat equation
is given by
),(),()(),(1
),( trftrutptrr
ur
rrtr
t
u
, ,10 r ,0 Tt
(4.14)
subjected to the given initial and boundary condition,
06.1)0,( ru ,10 r (4.15)
7),0( TCtu ,0 Tt
1),1( TCtu ,0 Tt
(4.16)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.003
0.006
0.009
0.012
0.015
t
AD
E o
f p
0
0.06
0.12
0.18
0.24
0.3
PE
of
p

37
with overspecified boundary condition at a point in the spatial domain,
5),()( 0 TCtrutE ,0 Tt (4.17)
1),( trf ,0 Tt (4.18)
where TC1, TC5, and TC7 are the temperatures measured by the thermocouples in Bidmus’
experiment as function of time t. The r0 is the coordinate location of TC5. Note that the initial
condition u(0, t) and the heat source f(r,t) are chosen after many trials of different values of those
parameters to observe a good matching between the model results and Bidmus’ experimental
data.
Figure 4.9 is the surface plot produced by the output of the Crank-Nicolson scheme with
a step size h= 1/100, k =1/100, and s = 100.
Figure 4.9 Surface plot of the numerical solution u(r, t) for the third model.
All the solution values of p(t) obtained by the predictor-corrector formula introduced in
section (3.3), can be represented graphically as below:
00.2
0.40.6
0.81
0
0.2
0.4
0.6
0.8
120
30
40
50
60
rt
u(r
,t)
30
35
40
45
50
55

38
Figure 4.10 The numerical solution p(t) for the third model.
Table 4.5 presents sample results obtained through the application of the proposed
algorithm for . The step size is h= 1/100 and k =1/100 in r and z directions, respectively. The
Stability condition s =k/h2= 25. For interested readers, the results data of TC3, TC4, and TC5 are
also provided in appendix B.
Table 4.5 Sample results of u(r,t) for TC2 and TC6 only.
TC2 TC6
t u Exp. u Theo. AED PE t u Exp. u Theo. AED PE 0.0 55.470 55.470 0.000 0.000 0.0 55.470 55.470 0.000 0.000 0.1 31.261 31.249 0.012 0.038 0.1 34.308 34.237 0.071 0.207 0.2 29.642 29.749 0.107 0.362 0.2 33.178 32.751 0.427 1.288 0.3 28.953 29.048 0.095 0.328 0.3 31.733 31.266 0.467 1.471 0.4 28.558 28.637 0.080 0.279 0.4 30.553 30.169 0.384 1.257 0.5 28.279 28.340 0.061 0.215 0.5 29.644 29.285 0.358 1.209 0.6 28.073 28.117 0.044 0.157 0.6 28.983 28.632 0.351 1.211 0.7 27.926 27.957 0.031 0.110 0.7 28.497 28.201 0.295 1.036 0.8 27.828 27.848 0.019 0.070 0.8 28.126 27.947 0.179 0.638 0.9 27.769 27.778 0.009 0.034 0.9 27.873 27.808 0.064 0.231 1.0 27.735 27.735 0.000 0.000 1.0 27.735 27.735 0.000 0.000
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-400
-300
-200
-100
0
100
200
t
p(t
)

39
Table 4.6 shows the RMSE, MAE for u(r, t) of the 1D inverse cylindrical model. Note
that for this particular problem, the p(t) function was unknown in the Bidmus’ experiment.
Therefore, one goal of solving this problem is to find this unknown control parameter. The 1D
inverse cylindrical model was able to produce a good prediction based on the lower values of
RMSE and MAE. The CPT utilized in determining the numerical solution is also provided in the
far right column as shown below.
Table 4.6 The RMSE, MAE and CPT time for u(r, t).
RMSE of u MAE of u CPT Time [seconds]
0.054880 1.201260 1.786
Figure 4.11 and 4.12 show the validation results for a selected data of TC2 and TC6,
respectively. Both figures show an excellent agreement between the experimental and simulation
data. It is also worth to note that all Bidmus’ data were normalized between values 0 and 1.
Then, after the model completed the simulation, all output results were denormalized back.
Figure 4.11 The numerical solution u(r, t) for the TC2.

40
Figure 4.12 The numerical solution u(r, t) for the TC6.
Figure 4.13 represents the ADE and PE of the numerical solution for TC2 at r = 0.812
from the center. The model produced a higher error at small values of t. This is likely to be due
to the initial guess. However, as the time progresses, the error becomes small until reaches zero
at t =1. This is likely due to the initial guess is updated during the computation presses.
Figure 4.13 ADE and PE of u(r, t) for the TC2.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
t
AD
E
0
0.5
1
1.5
2
PE
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 125
30
35
40
45
50
55
60g p [ ]
t
Tc6
& T
Theo.,[C
]
Exact solutionTheoretical solution

41
Figure 4.14 represents the ADE and PE of the numerical solution for TC6 at r = 0.25
from the center. This figure also shows good results for TC6, and both ADE and PE become
almost steady at interval of, 0.2 < t > 1. It was observed, in both cases (TC2 and TC6), that the
ADE and PE of the numerical solution are higher at t = 0. This is due to the fact the boundary
conditions for this particular problem have been kept the same without any adjustment, but the
initial condition and the heat source were adjusted in order to produce a reasonable results. The
goal was to use the Cartesian problem model to solve the cylindrical inverse problem with
adjusting the boundary condition, initial condition, or the heat source parameter in order to
mimic an acceptable results.
Figure 4.14 ADE and PE of u(r, t) for the TC6.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5g ( g )
t
AD
E
0
1
2
3
PE

42
4.4 Model Numerical Test in 2D Cylindrical Coordinates
For the purpose of illustrating the algorithm obtained in section 3.6.2, consider the
following example where the axisymmetric the 2D cylindrical coordinates problem is given by
),,(),,()(),,(),,(
1),,(
2
2
tzrftzrutptzrz
utzr
r
ur
rrtzr
t
u
,1,0 zr ,0 Tt
(4.19)
subjected to the given initial and boundary condition,
)()0,,( zrezru ,1,0 zr
)2(),,0( tzetzu ,10 z ,0 Tt
)21(),,1( tzetzu ,10 z ,0 Tt
)2(),0,( tretru ,10 r ,0 Tt
)21(),1,( tretru ,10 r ,0 Tt
and heat source parameter
(4.20)
(4.21)
)(),,( tetzrf ,1,0 zr ,0 Tt
The overspecified at a point in the spatial domain,
(4.22)
)()()( dtbt ceaetE ,1,0 zr ,0 Tt (4.23)
where a, b, c, d are overspecified boundary condition coefficients, and they are equal to 3.032,
1.843, -0.3288, and -15.4, respectively. Note that the first step of this algorithm is to begin with
solving (4.19) as direct problem using the PDE toolbox to generate data. Thus, these data can be
used with the 2D cylindrical coordinate model.
Figure 4.15 is the surface plot produced by the output of u(r,z,t) using the Crank-
Nicolson scheme with a step size h= 1/100, k =1/100, and s = 100.

43
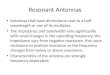
Figure 4.15 Surface plot of the numerical solution u(r,z, t) for the fourth model.
The solution values of p(t) produced by the predictor-corrector method in section (3.20),
is represented graphically in figure 4.16.
Figure 4.16 The numerical solution p(t) for the fourth model.
The sample results obtained through the application of the proposed algorithm for , at
the final time T = 1.0 is listed in table 4.7. The results is computed for a step size h= 1/100, k
=1/100, and s = 100.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1.5
-1
-0.5
0
0.5
1
1.5
t
p(t
)
00.2
0.40.6
0.81
00.2
0.40.6
0.810
20
40
60
rz
u(r,
z,t)
10
15
20
25
30
35
40
45
50

44
Table 4.7 Sample results of u(r,z,t) at t = T the fourth model
r z u PDE. u Theo. AED PE
0.0 0.0 7.389056 7.389056 0.000000 0.000000 0.1 0.1 9.112613 9.608045 0.495433 5.156434 0.2 0.2 11.193541 11.471296 0.277755 2.421305 0.3 0.3 13.647678 13.516619 0.131059 0.969614 0.4 0.4 16.570601 16.006276 0.564325 3.525649 0.5 0.5 20.103046 19.175509 0.927537 4.837095 0.6 0.6 24.426071 23.276005 1.150066 4.940992 0.7 0.7 29.761952 28.589850 1.172102 4.099712 0.8 0.8 36.375206 35.429187 0.946018 2.670167 0.9 0.9 44.565190 44.092981 0.472210 1.070940 1.0 1.0 54.598150 54.598150 0.000000 0.000000
The RMSE and MAE for u(r,z,t) are listed in table 4.8. The 2D model of the cylindrical
coordinates produces a larger error than that produced by the 2D model of the Cartesian
coordinates. In addition, the time for computation and the memory usage are higher as well.
Table 4.8 The RMSE, MAE and CPT time for u(r,z,t)
RMSE of u MAE of u CPT [seconds]
0.414698 1.790475 19.859638
Figure 4.17 uses a selected data at three different r coordinates and the final time t =T, to
show visually the validation results and compare the Crank-Nicolson solution with the PDE
toolbox solution. The model produce quite acceptable result at points near the boundary where z
can be within interval of 0 < z < 0.2 or 0.8 < z < 1, but higher mismatch at the middle as shown.

45
Figure 4.17 Comparison between the Crank-Nicolson and PDE toolbox solutions.
The plots (a), (b), and (c) in figure 4.18 represent AED and PE for a selected r
coordinates. As it is shown, both AED and PE are zero at the boundaries where z = 0 and x = 1.
This is expected result due to use the same boundary conditions in both PDE toolbox and the
Crank-Nicolson scheme. However, the MAE is increased on figure 4.18 (b) at r = 0.5, and then
increased on Figure 4.18 (c) at r = 0.8 as well. For this particular problem, both AED and PE
errors dominated by increasing the step number increasing in the r direction. This is due to the
truncation error introduced by applying the Crank–Nicolson finite difference scheme where it is
directly proportional to the spatial step size.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 15
10
15
20
25
30
35
40
45
z
u
CN u at r = 0.2
PDE u at r = 0.2
CN u at r = 0.5
PDE u at r = 0.5
CN u at r = 0.8
PDE u at r = 0.8

46
Figure 4.18 ADE and PE of u(r,z,t) for the fourth model.

47
CHAPTER 5
CONCLUSIONS AND FUTURE WORK
In this chapter, some concluding remarks are given about the work in the problem report.
Following this there is a discussion about some potential extensions for this future work.
5.1 Conclusions
This problem report describes numerical methods for inverse heat problems and estimates
the time-dependent heat source control parameter for one- and two-dimensional problems in both
Cartesian and cylindrical coordinates. Four computational models were studied in this work. In
the first two models, the numerical results were simulated through the exact solutions of selected
example. In the third model, the raw experimental data were employed for validation of the
outcome results. The fourth model was validated using the PDE toolbox generated data. In all
four models, the Crank-Nicolson finite difference method was applied to solve the inverse heat
conduction problems and the predictor-corrector method was used to recover the time-dependent
heat source control parameter p(t).
The first model was for 1D inverse problem in Cartesian coordinate with overspecified
boundary condition where what may appear as a temperature at a given point x0 in the spatial
domain at time t. The numerical results for the predicted parabolic solution u(x, t) and the time-
dependent heat source control parameter p(t) demonstrated excellent agreement between the
exact solution and simulation data. The Crank–Nicolson scheme is considered implicit and
unconditionally stable. Therefore, the step size was chosen to be a relatively small of 0.01 in
both x and t direction. This showed significant improvement when compared with several
numerical tests where a larger step size was used. Moreover, the approximation result for the
time-dependent heat source control parameter p(t) demonstrated accurate results and provided a

48
high degree of accuracy with only a few iterations (only 6 iterations were needed to converge to
a prescribed tolerance ).
For the second model, the 2D inverse problem in Cartesian coordinate with overspecified
boundary condition at a given point x0, y0 in the spatial domain was considered. The results
showed a very consistent and accurate numerical solution for the estimated u(x,y, t) and the time-
dependent heat source control parameter p(t). The root mean squared error (RMSE), the absolute
error difference (AED), the percentage error (PE), and the maximum absolute error (MAE) were
also estimated for this model. Those lower error criteria indicate that the 2D inverse problem
model is able to produce a good prediction. However, if the step size is too small, the numerical
results observed would be more accurate, but the computational process time (CPT) utilized in
determining the numerical solution as well as the memory usage would be high. In contrast, if
the step size is very large, the solutions observed might be inaccurate or considerable mismatch
may occur. Therefore, the step sizes are chosen to be 0.02 in x and y direction, and 0.01 in t
direction.
In the third model, the 1D inverse problem in cylindrical coordinate with overspecified
boundary condition at a given point r0 in the spatial domain was considered. The experimental
data were obtained from Bidmus who used a cylindrical vessel made of copper with 4 inch inside
diameter and 6 inch height. This vessel contains wax-solvent mixture that was heated by an
external by a temperature-regulated bath. There was also a temperature-regulated bath for
maintaining the temperatures of the coolant in the outer surface. The numerical treatment was
done using the Crank-Nicolson to estimate the temperature history of seven thermocouples
inserted inside the cylindrical vessel at different radial locations. It is important to note that the
numerical result for this model was obtained by taking only TC5 temperature measurements

49
which was located at the center of the cylindrical vessel as the overspecified boundary condition.
The results obtained for a selected data (TC2 and TC6) were accurate for “short times,”
acceptable for “moderate times,” and accurate again for “large times.” In general, the model
produces reliable results and temperature measurements that were very similar to Bidmus’
experimental data. Since there is no experimental data for the time-dependent heat source control
parameter p(t) in Bidmus’ experiment, there was no verification and accuracy check to the
approximated result of p(t). However, it was interesting to estimate a parameter that has been
previously overlooked when considering a fundamental heat equation like (3.21), yet this proves
that the time-dependent heat source control parameter p(t) does exist and this function can be
used to control the heat source for future experiments.
In the fourth model, the 2D inverse problem in a circular cylindrical rod with an
overspecified boundary condition at a given point r0 and z0 in the spatial domain was considered.
Since the exact solution for this model was not available to verify the approximation result for
the verification purpose and accuracy check, the numerical result from this model was compared
to results obtained from PDE toolbox. The numerical results were somewhat difficult to compare
to the estimated parabolic solutions with the PDE toolbox results. This difficulty was due
several factors. The first one was the complexity of the governing equation which requires
making simplifying assumptions for its solution. The 2D inverse problem model in Cartesian
coordinate was used with the necessary adjustments in the boundary conditions and heat source
parameter in order to mimic the PDE toolbox solutions. The second factor that the PDE toolbox
solver uses an algorithm based on the finite element method. This is considered as a numerical
technique that has its own error. The third factor results from the truncation error introduced by
applying the Crank–Nicholson finite difference scheme where it is directly proportional to the

50
spatial step size ((Δx)2 + (Δy)2 + (Δt)2). The numerical solution was also subjected to error due to
computing by retaining only a finite number of digits. This error is called round-off error [37].
Thus those factors contributed significantly to the divergence of the Crank–Nicolson
approximation results until it reaches its maximum value at points near the middle where z was
around 0.5.
5.2 Future work
Future work could be conducted to follow up on this study. All four inverse problem
models investigated here involve only one point overspecifed boundary condtion. It would be
interesting to recover the source control parameter with two points overspecifed boundary
condition. An extension of the work may be focused on modeling the 2D inverse problem in
cylindrical coordinate by using other explicit methods such as the Saulyev's first and second
schemes, which are known relatively easy to program. Although some challenges may still exist,
it is worth the attempt. The extension of 2D models in Cartesian coordinates to 3D model would
be much complicated, but this can be done in the same manner as the extension of 2D from 1D
model. It would be additionally interesting to validate those models with new experimental data
and move them to the application stage, instead of only testing them against the exact solutions.
Also worthy of further detailed investigation of using the convection term (Vz ) in the heat transfer
PDE for 2D cylindrical problem. This is mostly concerned with fluid transportation through
cylindrical tubes, such as flow lines or pipelines. In addition, it will be useful study to the wax
deposition where always posed a production problem in the petroleum industry.

51
REFERENCES
[1] M. Dehghan, “Numerical techniques for a parabolic equation subject to an overspecified
boundary condition,” Applied Mathematics and Computation, 132 (2002): 299–313.
[2] D. Trucu, D.B. Ingham, D. Lesnic, “Inverse time-dependent perfusion coefficient
identification,” Journal of Physics: Conference Series, 124 (2008): 1-28.
[3] T. Loulou, E. Scott, “An inverse heat conduction problem with heat flux measurements,”
International Journal for Numerical Methods in Engineering, 67 (2006): 1587–1616.
[4] M. Dehghan, F. Shakeri, “Method of lines solutions of the parabolic inverse problem
with an overspecification at a point.” Numerical Algorithms, 50 (2009): 417–437.
[5] J .R. Cannon, Y. Lin, S. Wang, “Determination of source parameter in parabolic
equations,” Meccanica, 27 (1992): 85–94.
[6] M. Dehghan, “Parameter determination in a partial differential equation from the
overspecified data,” Mathematical and Computer Modelling, 41 (2005): 197–213.
[7] A. Tarantola, Inverse problem theory and methods for model parameter estimation,
Society for Industrial and Applied Mathematics, (2005).
[8] V. Maz'ya, T. O. Shaposhnikova, Life and Work of Jacques Hadamard, American
Mathematical Society, (1998).
[9] V. Isakov, Inverse Problems for Partial Differential Equations, 127 Vol. New York:
Springer, (2006).
[10] L. Yang, M. Dehghan, J.N. Yu, G.W. Luo, “Inverse problem of time-dependent heat
sources numerical reconstruction,” Mathematics and Computers in Simulation, 81
(2011): 1656–1672.

52
[11] R. Soujoudi, “Estimation of surface temperature, surface heat flux and heat transfer
coefficient in the platform of inverse heat conduction problems,” M.S thesis,
Department of Mechanical Engineering. Construction and Environmental Engineering,
University of Texas at San Antonio, San Antonio: (2013).
[14] M. Dehghan, “Numerical solution of a parabolic equation subject to specification of
energy,” Applied Mathematics and Computation, 149 (2004): 31– 45.
[15] J. Martín-Vaquero, J. Vigo-Aguiar. “A note on efficient techniques for the second-order
parabolic equation subject to non-local conditions,” Applied Numerical Mathematics,
59(2009):1258-64.
[16] M. Dehghan, “On the numerical solution of the diffusion equation with a nonlocal
boundary condition,” Mathematical Problems in Engineering, 2003 (2003): 81-92.
[17] M. Dehghan, M. Tatari, “Solution of a Parabolic Equation with a Time-Dependent
Coefficient and an Extra Measurement using the Decomposition Procedure of
Adomian," Physica Scripta, 72 (2005): 425-431.
[18] D. Lesnic, S. A. Yousefi, M. Ivanchov, "Determination of a Time-Dependent Diffusivity
from Nonlocal Conditions," Journal of Applied Mathematics and Computing, 41(2013):
301-320.
[19] J. R. J .R. Cannon, P. DuChatea, K. Steubr, “Trace Type Functional Defferential
Equations and the Identification of Hydraulic Properties of Porous Media,” Transport in
Porous Media, 6 (1991): 745-758.
[20] J.R. Cannon, Y. Lin, “An inverse problem of finding a parameter in a semi-linear heat
equation,” Journal of Mathematical Analysis and Applications, 145 (1990): 470–484.

53
[21] J.R. Cannon, L. Yanping, S. Wang, "Determination of a Control Parameter in a
Parabolic Partial Differential Equation." The ANZIAM Journal, 33 (1991): 149-63.
[22] J.R. Cannon, Y. Lin, "Determination of a Parameter p(t) in some Quasi-Linear Parabolic
Differential Equations," Inverse Problems, 4 (1988): 35-45.
[23] J.R. Cannon, Y.L. Lin, S. Xu, “Numerical procedures for the determination of an
unknown coefficient in semi-linear parabolic differential equations,” Inverse Problems,
10 (1994): 227–243.
[24] M. Dehghan, "Finding a Control Parameter in One-Dimensional Parabolic Equations,"
Applied Mathematics and Computation, 135 (2003): 491-503.
[25] M. Tatari, M. Dehghan, "Identifying a Control Function in Parabolic Partial Differential
Equations from Overspecified Boundary Data," Computers and Mathematics with
Applications, 53 (2007): 1933-42.
[26] M. Dehghan,"Numerical Solution of One-Dimensional Parabolic Inverse Problem,"
Applied Mathematics and Computation, 136 (2003): 333-44.
[27] R.F. Warming, B.J. Hyett, “The modified equation approach to the stability and
accuracy analysis of finite-difference methods,” Journal of Computational Physics, 14
(1974) 159–179.
[28] M. Li-Min, W. Zong-Min, "Identifying the Temperature Distribution in a Parabolic
Equation with Overspecified Data using a Multiquadric Quasi-Interpolation Method."
Chinese Physics B, 19 (2010): 1-6.
[29] R. Cheng, "Determination of a Control Parameter in a One-Dimensional Parabolic
Equation using the Moving Least-Square Approximation." International Journal of
Computer Mathematics, 85 (2008): 1363-73.

54
[30] S. Wang, “Numerical solutions of two inverse problems for identifying control
parameters in 2-dimensional parabolic partial differential equations,” Modern
Developments in Numerical Simulation of Flow and Heat Transfer HTP, 194 (1992):
11–16.
[31] A. Shidfar, R. Zolfaghari, "Determination of an Unknown Function in a Parabolic
Inverse Problem by Sinc‐collocation Method," Numerical Methods for Partial
Differential Equations, 27 (2011): 1584-1598.
[32] M. Dehghan," Determination of a control parameter in the two-dimensional diffusion
equation," Applied Numerical Mathematics, 37 (2001): 489-502.
[33] D. Homberg, M. Yamamoto, “On an inverse problem related to laser material
treatments,” Inverse Problems, 22 (2006): 1855 – 1867.
[34] K. V. Wong, Intermediate Heat Transfer. Florence, Boca Raton: C R C Press LLC:
(2003).
[35] P. Ahuja, Introduction To Numerical Methods In Chemical Engineering, , PHI, New
Delhi: (2003).
[36] H. O. Bidmus, "Investigation of Solids Deposition from Wax-Solvent Mixtures Under
Static, Sheared, and 'Cold Flow' Cooling Conditions," PhD Thesis, University of
Calgary, Calgary, Canada: (2009).
[37] R. S. Esfandiari, “Numerical Methods for Engineers and Scientists using MATLAB,” Boca
Raton: CRC Press, Taylor & Francis Group: (2013).

55
APPENDIX A
A.1 1D Problem Derivations
If we normalize the equation (2.1), and set c(u) and a(t) = 1, then the following Equations
will results:
),(),()(),(),(2
2
txftxutptxx
utx
t
u
,10 x ,0 Tt
(A.1)
subjected to the given initial,
)()0,( xxu ,10 x (A.2)
and boundary conditions,
)(),0( 1 tgtu ,0 Tt
)(),1( 2 tgtu ,0 Tt
with overspecification at a point in the spatial domain,
(A.3)
(A.4)
)(),( 0 tEtxu ,0 Tt (A.5)
The Crank–Nicholson method for 1D is an average of explicit and implicit method. Thus the
difference approximation for , , , , can be expressed as follow:
)(2
1 1 ni
ni uuu
(A.6)
)(
1 1 ni
ni uu
kt
u
(A.7)
)1
21
(2
1)1
1121
1(
2
1222
2ni
uni
uni
uh
ni
uni
uni
uhx
u
(A.8)

56
2,,2,1 Mi
)(2
1 1 ni
ni ppp
)(2
1 1 ni
ni fff
(A.9)
(A.10)
Substituting the above into the PDE (A.1) results in,
][
2
1)(
1 12
1 ni
ni
ni
ni uu
huu
k
))((4
1 11 ni
ni
nn uupp
)(2
1 1 ni
ni ff ,10 Mi 10 Nn
(A.11)
Where,
)1
21
( i
ui
ui
ui
u
Multiplying through by h2 to eliminate the denominators, and collecting all the
terms involving the unknown un+1’s on the left hand side and the known un’s on
the right hand side results in:
),(2
)1(2 122
nn pph
k
hR
(A.12)
),()()(
2)1(2 1
11
21
1121
122
1nnnnnnnn ffhgguupp
h
k
hb
(A.13)
),()()(
2)1(2 1
11
22
1221
122
1n
Mn
Mnnn
MnM
nnM ffhgguupp
h
k
hb
(A.14)
),()(
2)1(2 12
111
22n
in
ini
ni
ni
nni ffhuuupp
h
k
hb
(A.15)

57
A.2 Thomas Algorithm
Consider the following tridiagonal set of linear algebraic of equations:
)(1 nUBnAU
(3.16)
1
2
2
1
11
12
12
11
100
110
0011
001
M
M
nM
nM
n
n
b
b
b
b
u
u
u
u
R
R
R
R
1,2,… , 2 (3.17)
The matrix A contains elements on the diagonal (R, i = 1 to M-1), sub- diagonal (1),
super- diagonal (1), and thus is called the tridiagonal matrix. The algorithm for solving this
system of equation as follow:
1,...3,2,)-(
=
1,...3,2,1
=
=
=
i
1-ii
1-ii
11
1
Mib
MiR
R
b
R
i
(A.18)
(A.19)
(A.20)
(A.21)
The algorithm for the solution of the tridiagonal set of linear equations is given below:
I. Calculate βi and γi for i = 1 to M. II. Calculate uM = γM.
III. Calculate ui = γi – ui+1/ βi.

58
A.3 2D Problem Derivations
Here, all physical constants have been normalized in Eq. (2.6), and set C(u) and a(t) = 1, then the following Equations will results:
),,(),,()(),,(),,(),,(
2
2
2
2
tyxftyxutptyxy
utyx
x
utyx
t
u
,1,0 yx ,0 Tt
(A.22)
subjected to the given initial,
),()0,,( yxyxu ,1,0 yx (A.23)
and boundary conditions,
),(),,0( 1 tgtyu ,10 t
)(),,1( 2 tgtyu ,10 t
),(),0,( 1 thtxu ,10 t
)(),1,( 2 thtxu ,10 t
with overspecification at a point in the spatial domain,
(A.24)
(A.25)
(A.26)
(A.27)
)(),,( 00 tEtyxu ,0 Tt (A.28)
The Crank–Nicolson method for 2D is an average of explicit and implicit method. Thus the
difference approximation for , , , , , can be expressed as follow:
)(2
1,
1,
nji
nji uuu
(A.29)
)(
1,
1,
nji
nji uu
kt
u
(A.30)
)
,1,2
,1(
2
1)1
,11
,21
,1(
2
1222
2n
jiun
jiun
jiu
hn
jiun
jiun
jiu
hx
u
(A.31)

59
)1,,
21,
(2
1)1
1,1
,21
1,(
2
1222
2n
jiun
jiun
jiu
hn
jiun
jiun
jiu
hy
u
(A.32)
)(2
1 1 ni
ni ppp
)(2
1 1 ni
ni fff
Substituting the above into the PDE (A.22) results in,
][2
1)(
1,
1,2,
1,
nji
nji
nji
nji uu
huu
k ))((
4
1,
1,
1 nji
nji
nn uupp
)(2
1,
1,
nji
nji ff ,1,0 Mji 10 Nn
Where,
),
41,1,,1,1
(, ji
uji
uji
uji
uji
uji
u
Equation (A.34 ) also can be rewritten as
jibn
jiun
jiun
jiun
jiun
jiRu
,)1
1,1
1,1,1
1,1
(1,
(A.33)
(A.34)
(A.35)
(A.36)
(A.37)
Multiplying through by h2 to eliminate the denominators, and collecting all the terms involving
the unknown un+1’s on the left hand side and the known un’s on the right hand side results in:
Where, ),(2
24 122
nn pph
k
hR (A.38)
njiji u
k
hb ,
2
, )2( nji
u,
+ )(2
12
nn pph
njiu , + ),( 1
11
2 nM
nM ffh 1,1 Mji
(A.39)

60
APPENDIX B
MATLAB CODES OUTPUTS
Table. B.1 the output results of u(x,t) for the first model, h= k =1/100, s =100 and T =1.
x u Ex. u Theo. ADE PE x u Ex. u Theo. ADE PE 0.00 0.367879 0.367879 0.000000 0.000000 0.51 0.356143 0.356289 0.000146 0.041004 0.01 0.379253 0.379261 0.000008 0.002021 0.52 0.344054 0.344198 0.000144 0.041870 0.02 0.390253 0.390268 0.000015 0.003888 0.53 0.331626 0.331768 0.000142 0.042803 0.03 0.400867 0.400890 0.000023 0.005618 0.54 0.318871 0.319011 0.000140 0.043812 0.04 0.411086 0.411116 0.000030 0.007224 0.55 0.305801 0.305939 0.000137 0.044910 0.05 0.420899 0.420936 0.000037 0.008721 0.56 0.292430 0.292564 0.000135 0.046113 0.06 0.430297 0.430341 0.000044 0.010119 0.57 0.278769 0.278902 0.000132 0.047439 0.07 0.439270 0.439320 0.000050 0.011427 0.58 0.264834 0.264963 0.000130 0.048911 0.08 0.447810 0.447866 0.000057 0.012655 0.59 0.250637 0.250764 0.000127 0.050558 0.09 0.455907 0.455970 0.000063 0.013810 0.60 0.236193 0.236317 0.000124 0.052416 0.10 0.463555 0.463624 0.000069 0.014898 0.61 0.221516 0.221637 0.000121 0.054533 0.11 0.470745 0.470820 0.000075 0.015926 0.62 0.206620 0.206738 0.000118 0.056968 0.12 0.477471 0.477552 0.000081 0.016900 0.63 0.191521 0.191635 0.000115 0.059804 0.13 0.483726 0.483812 0.000086 0.017823 0.64 0.176232 0.176343 0.000111 0.063151 0.14 0.489503 0.489594 0.000092 0.018700 0.65 0.160769 0.160877 0.000108 0.067164 0.15 0.494797 0.494893 0.000097 0.019535 0.66 0.145148 0.145253 0.000105 0.072069 0.16 0.499602 0.499704 0.000102 0.020332 0.67 0.129383 0.129485 0.000101 0.078201 0.17 0.503915 0.504021 0.000106 0.021094 0.68 0.113491 0.113589 0.000098 0.086088 0.18 0.507731 0.507841 0.000111 0.021824 0.69 0.097487 0.097581 0.000094 0.096613 0.19 0.511045 0.511160 0.000115 0.022525 0.70 0.081387 0.081477 0.000091 0.111360 0.20 0.513855 0.513974 0.000119 0.023199 0.71 0.065206 0.065293 0.000087 0.133500 0.21 0.516158 0.516281 0.000123 0.023849 0.72 0.048961 0.049044 0.000083 0.170435 0.22 0.517951 0.518078 0.000127 0.024476 0.73 0.032667 0.032747 0.000080 0.244362 0.23 0.519233 0.519364 0.000130 0.025084 0.74 0.016342 0.016418 0.000076 0.466281 0.24 0.520003 0.520137 0.000133 0.025673 0.75 0.000000 0.000073 0.000073 NaN 0.25 0.520260 0.520397 0.000137 0.026245 0.76 -0.016342 -0.016273 0.000069 0.421876 0.26 0.520003 0.520143 0.000139 0.026804 0.77 -0.032667 -0.032602 0.000065 0.199976 0.27 0.519233 0.519375 0.000142 0.027349 0.78 -0.048961 -0.048899 0.000062 0.126080 0.28 0.517951 0.518096 0.000144 0.027882 0.79 -0.065206 -0.065148 0.000058 0.089190 0.29 0.516158 0.516304 0.000147 0.028406 0.80 -0.081387 -0.081332 0.000055 0.067106 0.30 0.513855 0.514003 0.000149 0.028922 0.81 -0.097487 -0.097436 0.000051 0.052428 0.31 0.511045 0.511195 0.000150 0.029431 0.82 -0.113491 -0.113444 0.000048 0.041986 0.32 0.507731 0.507883 0.000152 0.029935 0.83 -0.129383 -0.129339 0.000044 0.034193 0.33 0.503915 0.504069 0.000153 0.030435 0.84 -0.145148 -0.145107 0.000041 0.028170 0.34 0.499602 0.499757 0.000155 0.030933 0.85 -0.160769 -0.160732 0.000038 0.023387 0.35 0.494797 0.494952 0.000156 0.031431 0.86 -0.176232 -0.176197 0.000034 0.019508 0.36 0.489503 0.489659 0.000156 0.031929 0.87 -0.191521 -0.191489 0.000031 0.016309 0.37 0.483726 0.483882 0.000157 0.032430 0.88 -0.206620 -0.206592 0.000028 0.013636 0.38 0.477471 0.477628 0.000157 0.032935 0.89 -0.221516 -0.221491 0.000025 0.011377 0.39 0.470745 0.470903 0.000157 0.033446 0.90 -0.236193 -0.236171 0.000022 0.009452 0.40 0.463555 0.463713 0.000157 0.033966 0.91 -0.250637 -0.250618 0.000020 0.007799 0.41 0.455907 0.456065 0.000157 0.034496 0.92 -0.264834 -0.264817 0.000017 0.006372 0.42 0.447810 0.447967 0.000157 0.035038 0.93 -0.278769 -0.278755 0.000014 0.005135 0.43 0.439270 0.439426 0.000156 0.035596 0.94 -0.292430 -0.292418 0.000012 0.004061 0.44 0.430297 0.430453 0.000156 0.036171 0.95 -0.305801 -0.305792 0.000010 0.003125 0.45 0.420899 0.421054 0.000155 0.036767 0.96 -0.318871 -0.318864 0.000007 0.002310 0.46 0.411086 0.411240 0.000154 0.037387 0.97 -0.331626 -0.331621 0.000005 0.001601 0.47 0.400867 0.401020 0.000152 0.038035 0.98 -0.344054 -0.344051 0.000003 0.000986 0.48 0.390253 0.390404 0.000151 0.038716 0.99 -0.356143 -0.356141 0.000002 0.000456 0.49 0.379253 0.379403 0.000150 0.039433 1.00 -0.367879 -0.367879 0.000000 0.000000 0.50 0.367879 0.368027 0.000148 0.040194

61
Table. B.2 the output results of p(t) for first model, h= k =1/100, s =100 and T =1.
t p Ex. p Theo. AED PE Itr. #
t p Ex. p Theo. AED PE
Itr. #
0.00 1.000000 1.000000 0.000000 0.000000 0 0.51 1.260100 1.259793 0.000307 0.024346 6 0.01 1.000100 0.999347 0.000753 0.075317 5 0.52 1.270400 1.270116 0.000284 0.022384 6 0.02 1.000400 0.999678 0.000722 0.072146 5 0.53 1.280900 1.280639 0.000261 0.020379 6 0.03 1.000900 1.000177 0.000723 0.072263 5 0.54 1.291600 1.291363 0.000237 0.018332 6 0.04 1.001600 1.000866 0.000734 0.073284 5 0.55 1.302500 1.302288 0.000212 0.016241 6 0.05 1.002500 1.001770 0.000730 0.072787 5 0.56 1.313600 1.313415 0.000185 0.014104 6 0.06 1.003600 1.002867 0.000733 0.073064 5 0.57 1.324900 1.324742 0.000158 0.011922 6 0.07 1.004900 1.004167 0.000733 0.072896 5 0.58 1.336400 1.336270 0.000130 0.009693 6 0.08 1.006400 1.005669 0.000731 0.072675 5 0.59 1.348100 1.348000 0.000100 0.007416 6 0.09 1.008100 1.007369 0.000731 0.072531 5 0.60 1.360000 1.359931 0.000069 0.005089 6 0.10 1.010000 1.009272 0.000728 0.072118 5 0.61 1.372100 1.372063 0.000037 0.002711 6 0.11 1.012100 1.011373 0.000727 0.071855 5 0.62 1.384400 1.384396 0.000004 0.000281 6 0.12 1.014400 1.013676 0.000724 0.071362 5 0.63 1.396900 1.396931 0.000031 0.002204 6 0.13 1.016900 1.016178 0.000722 0.070957 5 0.64 1.409600 1.409667 0.000067 0.004744 6 0.14 1.019600 1.018882 0.000718 0.070408 5 0.65 1.422500 1.422604 0.000104 0.007343 6 0.15 1.022500 1.021786 0.000714 0.069875 5 0.66 1.435600 1.435744 0.000144 0.010000 6 0.16 1.025600 1.024890 0.000710 0.069268 5 0.67 1.448900 1.449084 0.000184 0.012720 6 0.17 1.028900 1.028194 0.000706 0.068628 5 0.68 1.462400 1.462627 0.000227 0.015504 6 0.18 1.032400 1.031698 0.000702 0.067955 5 0.69 1.476100 1.476371 0.000271 0.018354 6 0.19 1.036100 1.035404 0.000696 0.067218 6 0.70 1.490000 1.490317 0.000317 0.021273 6 0.20 1.040000 1.039309 0.000691 0.066462 6 0.71 1.504100 1.504465 0.000365 0.024264 6 0.21 1.044100 1.043415 0.000685 0.065640 6 0.72 1.518400 1.518815 0.000415 0.027329 6 0.22 1.048400 1.047721 0.000679 0.064810 6 0.73 1.532900 1.533367 0.000467 0.030471 6 0.23 1.052900 1.052227 0.000673 0.063913 6 0.74 1.547600 1.548121 0.000521 0.033694 6 0.24 1.057600 1.056934 0.000666 0.063006 6 0.75 1.562500 1.563078 0.000578 0.037001 6 0.25 1.062500 1.061841 0.000659 0.062038 6 0.76 1.577600 1.578237 0.000637 0.040395 6 0.26 1.067600 1.066948 0.000652 0.061053 6 0.77 1.592900 1.593599 0.000699 0.043880 6 0.27 1.072900 1.072256 0.000644 0.060016 6 0.78 1.608400 1.609163 0.000763 0.047460 6 0.28 1.078400 1.077764 0.000636 0.058955 6 0.79 1.624100 1.624931 0.000831 0.051140 6 0.29 1.084100 1.083473 0.000627 0.057848 6 0.80 1.640000 1.640901 0.000901 0.054923 6 0.30 1.090000 1.089382 0.000618 0.056711 6 0.81 1.656100 1.657074 0.000974 0.058815 6 0.31 1.096100 1.095491 0.000609 0.055534 6 0.82 1.672400 1.673451 0.001051 0.062820 6 0.32 1.102400 1.101801 0.000599 0.054323 6 0.83 1.688900 1.690031 0.001131 0.066944 6 0.33 1.108900 1.108311 0.000589 0.053075 6 0.84 1.705600 1.706814 0.001214 0.071191 6 0.34 1.115600 1.115022 0.000578 0.051791 6 0.85 1.722500 1.723802 0.001302 0.075569 6 0.35 1.122500 1.121933 0.000567 0.050472 6 0.86 1.739600 1.740993 0.001393 0.080083 6 0.36 1.129600 1.129045 0.000555 0.049115 6 0.87 1.756900 1.758389 0.001489 0.084739 6 0.37 1.136900 1.136357 0.000543 0.047725 6 0.88 1.774400 1.775989 0.001589 0.089545 6 0.38 1.144400 1.143870 0.000530 0.046295 6 0.89 1.792100 1.793794 0.001694 0.094508 6 0.39 1.152100 1.151583 0.000517 0.044833 6 0.90 1.810000 1.811803 0.001803 0.099635 6 0.40 1.160000 1.159497 0.000503 0.043331 6 0.91 1.828100 1.830018 0.001918 0.104935 6 0.41 1.168100 1.167612 0.000488 0.041795 6 0.92 1.846400 1.848439 0.002039 0.110417 6 0.42 1.176400 1.175927 0.000473 0.040220 6 0.93 1.864900 1.867065 0.002165 0.116088 6 0.43 1.184900 1.184443 0.000457 0.038610 6 0.94 1.883600 1.885897 0.002297 0.121960 6 0.44 1.193600 1.193159 0.000441 0.036961 6 0.95 1.902500 1.904936 0.002436 0.128042 6 0.45 1.202500 1.202076 0.000424 0.035276 6 0.96 1.921600 1.924182 0.002582 0.134345 6 0.46 1.211600 1.211193 0.000407 0.033551 6 0.97 1.940900 1.943634 0.002734 0.140881 6 0.47 1.220900 1.220512 0.000388 0.031790 6 0.98 1.960400 1.963295 0.002895 0.147661 6 0.48 1.230400 1.230031 0.000369 0.029988 6 0.99 1.980100 1.983163 0.003063 0.154698 6 0.49 1.240100 1.239751 0.000349 0.028148 6 1.00 2.000000 2.003240 0.003240 0.162007 6 0.50 1.250000 1.249672 0.000328 0.026267 6

62
Table. B.3 the output results of u(x,y,t) for the second model, h= 1/50, k =1/100, s = 25 and T =1.
x y u Ex. u Theo. AED PE 0.00 0.00 0.000000 0.000000 0.000000 NaN 0.02 0.02 0.128049 0.128038 0.000011 0.008601 0.04 0.04 0.255813 0.255770 0.000043 0.016697 0.06 0.06 0.383009 0.382916 0.000093 0.024305 0.08 0.08 0.509355 0.509195 0.000160 0.031442 0.10 0.10 0.634570 0.634328 0.000242 0.038122 0.12 0.12 0.758376 0.758040 0.000336 0.044360 0.14 0.14 0.880499 0.880057 0.000442 0.050167 0.16 0.16 1.000666 1.000110 0.000556 0.055556 0.18 0.18 1.118612 1.117935 0.000677 0.060536 0.20 0.20 1.234074 1.233271 0.000804 0.065117 0.22 0.22 1.346796 1.345863 0.000933 0.069308 0.24 0.24 1.456528 1.455463 0.001065 0.073117 0.26 0.26 1.563026 1.561830 0.001197 0.076551 0.28 0.28 1.666054 1.664728 0.001326 0.079616 0.30 0.30 1.765383 1.763930 0.001453 0.082318 0.32 0.32 1.860792 1.859217 0.001575 0.084663 0.34 0.34 1.952070 1.950378 0.001692 0.086655 0.36 0.36 2.039013 2.037213 0.001800 0.088300 0.38 0.38 2.121430 2.119529 0.001901 0.089600 0.40 0.40 2.199136 2.197145 0.001992 0.090561 0.42 0.42 2.271960 2.269888 0.002072 0.091185 0.44 0.44 2.339739 2.337599 0.002140 0.091476 0.46 0.46 2.402324 2.400127 0.002197 0.091437 0.48 0.48 2.459575 2.457335 0.002240 0.091072 0.50 0.50 2.511365 2.509095 0.002270 0.090383 0.52 0.52 2.557579 2.555293 0.002286 0.089373 0.54 0.54 2.598115 2.595827 0.002288 0.088047 0.56 0.56 2.632882 2.630607 0.002275 0.086407 0.58 0.58 2.661804 2.659556 0.002248 0.084456 0.60 0.60 2.684815 2.682608 0.002207 0.082199 0.62 0.62 2.701866 2.699714 0.002152 0.079640 0.64 0.64 2.712918 2.710835 0.002083 0.076783 0.66 0.66 2.717946 2.715945 0.002001 0.073635 0.68 0.68 2.716941 2.715033 0.001907 0.070201 0.70 0.70 2.709902 2.708100 0.001802 0.066490 0.72 0.72 2.696847 2.695162 0.001686 0.062512 0.74 0.74 2.677805 2.676244 0.001561 0.058278 0.76 0.76 2.652817 2.651389 0.001427 0.053803 0.78 0.78 2.621939 2.620651 0.001288 0.049106 0.80 0.80 2.585240 2.584097 0.001143 0.044210 0.82 0.82 2.542801 2.541805 0.000995 0.039145 0.84 0.84 2.494716 2.493869 0.000847 0.033949 0.86 0.86 2.441092 2.440392 0.000700 0.028675 0.88 0.88 2.382049 2.381491 0.000557 0.023387 0.90 0.90 2.317716 2.317295 0.000421 0.018174 0.92 0.92 2.248238 2.247942 0.000296 0.013158 0.94 0.94 2.173768 2.173583 0.000185 0.008505 0.96 0.96 2.094472 2.094379 0.000093 0.004456 0.98 0.98 2.010526 2.010498 0.000028 0.001385 1.00 1.00 1.922116 1.922116 0.000000 0.000000

63
Table. B.4 the output results of p(t) for the second model, h= k =1/100, s =25 and T =1.
t p Ex. p Theo. AED PE Itr. #
t p Ex. p Theo. AED PE
Itr. #
0.00 1.000000 1.000000 0.000000 0.000000 0 0.51 3.550000 3.548235 0.001765 0.049720 5 0.01 1.050000 1.049783 0.000217 0.020640 5 0.52 3.600000 3.598174 0.001826 0.050731 5 0.02 1.100000 1.099770 0.000230 0.020886 5 0.53 3.650000 3.648111 0.001889 0.051761 5 0.03 1.150000 1.149749 0.000251 0.021796 5 0.54 3.700000 3.698045 0.001955 0.052851 5 0.04 1.200000 1.199731 0.000269 0.022411 5 0.55 3.750000 3.747976 0.002024 0.053965 5 0.05 1.250000 1.249713 0.000287 0.022975 5 0.56 3.800000 3.797905 0.002095 0.055145 5 0.06 1.300000 1.299692 0.000308 0.023657 5 0.57 3.850000 3.847831 0.002169 0.056350 5 0.07 1.350000 1.349673 0.000327 0.024187 5 0.58 3.900000 3.897753 0.002247 0.057624 5 0.08 1.400000 1.399652 0.000348 0.024824 5 0.59 3.950000 3.947672 0.002328 0.058935 5 0.09 1.450000 1.449633 0.000367 0.025322 5 0.60 4.000000 3.997588 0.002412 0.060311 5 0.10 1.500000 1.499611 0.000389 0.025909 5 0.61 4.050000 4.047500 0.002500 0.061737 5 0.11 1.550000 1.549591 0.000409 0.026375 5 0.62 4.100000 4.097408 0.002592 0.063227 5 0.12 1.600000 1.599569 0.000431 0.026914 5 0.63 4.150000 4.147312 0.002688 0.064778 5 0.13 1.650000 1.649549 0.000451 0.027355 5 0.64 4.200000 4.197211 0.002789 0.066395 5 0.14 1.700000 1.699526 0.000474 0.027863 5 0.65 4.250000 4.247106 0.002894 0.068084 5 0.15 1.750000 1.749505 0.000495 0.028285 5 0.66 4.300000 4.296997 0.003003 0.069843 5 0.16 1.800000 1.799482 0.000518 0.028767 5 0.67 4.350000 4.346882 0.003118 0.071681 5 0.17 1.850000 1.849460 0.000540 0.029188 5 0.68 4.400000 4.396762 0.003238 0.073598 5 0.18 1.900000 1.899437 0.000563 0.029645 5 0.69 4.450000 4.446636 0.003364 0.075602 5 0.19 1.950000 1.949414 0.000586 0.030071 5 0.70 4.500000 4.496504 0.003496 0.077692 5 0.20 2.000000 1.999390 0.000610 0.030517 5 0.71 4.550000 4.546365 0.003635 0.079879 5 0.21 2.050000 2.049366 0.000634 0.030943 5 0.72 4.600000 4.596220 0.003780 0.082163 5 0.22 2.100000 2.099341 0.000659 0.031395 5 0.73 4.650000 4.646068 0.003932 0.084553 5 0.23 2.150000 2.149316 0.000684 0.031821 5 0.74 4.700000 4.695909 0.004091 0.087050 5 0.24 2.200000 2.199290 0.000710 0.032282 5 0.75 4.750000 4.745741 0.004259 0.089665 5 0.25 2.250000 2.249264 0.000736 0.032716 5 0.76 4.800000 4.795565 0.004435 0.092400 5 0.26 2.300000 2.299237 0.000763 0.033190 5 0.77 4.850000 4.845380 0.004620 0.095266 5 0.27 2.350000 2.349209 0.000791 0.033639 5 0.78 4.900000 4.895185 0.004815 0.098264 5 0.28 2.400000 2.399181 0.000819 0.034126 5 0.79 4.950000 4.944980 0.005020 0.101408 5 0.29 2.450000 2.449152 0.000848 0.034598 5 0.80 5.000000 4.994765 0.005235 0.104701 5 0.30 2.500000 2.499123 0.000877 0.035099 5 0.81 5.050000 5.044538 0.005462 0.108154 5 0.31 2.550000 2.549092 0.000908 0.035599 5 0.82 5.100000 5.094300 0.005700 0.111774 5 0.32 2.600000 2.599061 0.000939 0.036120 5 0.83 5.150000 5.144048 0.005952 0.115573 5 0.33 2.650000 2.649029 0.000971 0.036647 5 0.84 5.200000 5.193783 0.006217 0.119558 5 0.34 2.700000 2.698996 0.001004 0.037196 5 0.85 5.250000 5.243503 0.006497 0.123744 5 0.35 2.750000 2.748962 0.001038 0.037753 5 0.86 5.300000 5.293209 0.006791 0.128137 5 0.36 2.800000 2.798927 0.001073 0.038334 5 0.87 5.350000 5.342898 0.007102 0.132756 5 0.37 2.850000 2.848891 0.001109 0.038924 5 0.88 5.400000 5.392569 0.007431 0.137606 5 0.38 2.900000 2.898853 0.001147 0.039543 5 0.89 5.450000 5.442222 0.007778 0.142708 5 0.39 2.950000 2.948815 0.001185 0.040170 5 0.90 5.500000 5.491856 0.008144 0.148071 5 0.40 3.000000 2.998775 0.001225 0.040829 5 0.91 5.550000 5.541469 0.008531 0.153716 5 0.41 3.050000 3.048734 0.001266 0.041498 5 0.92 5.600000 5.591059 0.008941 0.159655 5 0.42 3.100000 3.098692 0.001308 0.042203 5 0.93 5.650000 5.640626 0.009374 0.165909 5 0.43 3.150000 3.148648 0.001352 0.042918 5 0.94 5.700000 5.690168 0.009832 0.172495 5 0.44 3.200000 3.198602 0.001398 0.043673 5 0.95 5.750000 5.739682 0.010318 0.179436 5 0.45 3.250000 3.248556 0.001444 0.044439 5 0.96 5.800000 5.789169 0.010831 0.186749 5 0.46 3.300000 3.298507 0.001493 0.045250 5 0.97 5.850000 5.838624 0.011376 0.194462 5 0.47 3.350000 3.348457 0.001543 0.046073 5 0.98 5.900000 5.888047 0.011953 0.202597 5 0.48 3.400000 3.398404 0.001596 0.046944 5 0.99 5.950000 5.937435 0.012565 0.211182 5 0.49 3.450000 3.448350 0.001650 0.047829 5 1.00 6.000000 5.986785 0.013215 0.220245 5 0.50 3.500000 3.498293 0.001707 0.048767 5

64
Table. B.5 the output results of u(r,t) or (TC 2) for the third model, h= k =1/100, s =100 and T =1.
Normalized Data Denormalized Data
t u Exp. u Theo. AED PE t u Exp. u Theo. AED PE 0.00 1.004937 1.060000 0.055063 5.479209 0.00 55.470000 55.470000 0.000000 0.000000 0.01 0.517178 0.520440 0.003262 0.630726 0.01 41.992976 41.323459 0.669517 1.594355 0.02 0.345183 0.345758 0.000575 0.166587 0.02 37.240682 36.743541 0.497140 1.334939 0.03 0.283517 0.279355 0.004161 1.467807 0.03 35.536804 35.002541 0.534263 1.503409 0.04 0.246136 0.240813 0.005322 2.162378 0.04 34.503939 33.992014 0.511925 1.483671 0.05 0.215704 0.212022 0.003681 1.706640 0.05 33.663095 33.237162 0.425934 1.265284 0.06 0.190407 0.189820 0.000587 0.308316 0.06 32.964129 32.655036 0.309092 0.937663 0.07 0.169815 0.172138 0.002323 1.367837 0.07 32.395159 32.191431 0.203728 0.628884 0.08 0.153228 0.157883 0.004655 3.038119 0.08 31.936850 31.817694 0.119156 0.373100 0.09 0.139803 0.146117 0.006313 4.515733 0.09 31.565932 31.509197 0.056736 0.179737 0.10 0.128750 0.136183 0.007433 5.773332 0.10 31.260529 31.248765 0.011765 0.037635 0.11 0.119429 0.127611 0.008182 6.850996 0.11 31.002972 31.024002 0.021030 0.067833 0.12 0.111374 0.120046 0.008672 7.786236 0.12 30.780411 30.825655 0.045243 0.146988 0.13 0.104271 0.113273 0.009001 8.632685 0.13 30.584160 30.648072 0.063912 0.208971 0.14 0.097916 0.107112 0.009196 9.391269 0.14 30.408563 30.486538 0.077975 0.256424 0.15 0.092175 0.101475 0.009300 10.089174 0.15 30.249941 30.338751 0.088811 0.293589 0.16 0.086958 0.096268 0.009310 10.706226 0.16 30.105790 30.202234 0.096444 0.320350 0.17 0.082198 0.091459 0.009260 11.265601 0.17 29.974279 30.076138 0.101859 0.339820 0.18 0.077844 0.086990 0.009146 11.748927 0.18 29.853959 29.958968 0.105009 0.351742 0.19 0.073850 0.082849 0.008999 12.185171 0.19 29.743612 29.850403 0.106792 0.359041 0.20 0.070179 0.078995 0.008816 12.561629 0.20 29.642175 29.749348 0.107173 0.361556 0.21 0.066796 0.075420 0.008623 12.909898 0.21 29.548709 29.655616 0.106907 0.361799 0.22 0.063672 0.072089 0.008417 13.219319 0.22 29.462372 29.568280 0.105908 0.359467 0.23 0.060778 0.068994 0.008217 13.519261 0.23 29.382413 29.487156 0.104743 0.356481 0.24 0.058090 0.066106 0.008015 13.798118 0.24 29.308157 29.411415 0.103258 0.352319 0.25 0.055587 0.063414 0.007827 14.080510 0.25 29.239003 29.340856 0.101853 0.348346 0.26 0.053250 0.060893 0.007643 14.353056 0.26 29.174413 29.274742 0.100329 0.343892 0.27 0.051060 0.058533 0.007473 14.635283 0.27 29.113909 29.212866 0.098958 0.339899 0.28 0.049003 0.056310 0.007308 14.912649 0.28 29.057062 29.154594 0.097531 0.335655 0.29 0.047064 0.054218 0.007154 15.200418 0.29 29.003495 29.099735 0.096239 0.331820 0.30 0.045232 0.052235 0.007004 15.484042 0.30 28.952872 29.047760 0.094888 0.327732 0.31 0.043495 0.050357 0.006862 15.775693 0.31 28.904894 28.998510 0.093616 0.323876 0.32 0.041845 0.048566 0.006721 16.061912 0.32 28.859299 28.951560 0.092261 0.319691 0.33 0.040273 0.046859 0.006586 16.352806 0.33 28.815855 28.906786 0.090931 0.315557 0.34 0.038771 0.045221 0.006450 16.636757 0.34 28.774358 28.863856 0.089498 0.311034 0.35 0.037333 0.043651 0.006318 16.922499 0.35 28.734627 28.822680 0.088053 0.306435

65
Table. B.6 the output results of u(r,t) or (TC 3) for the third model , h= k =1/100, s =100 and T =1.
Normalized Data Denormalized Data
t u Exp. u Theo. AED PE t u Exp. u Theo. AED PE 0.00 1.011662 1.060000 0.048338 4.778088 0.00 55.470000 55.470000 0.000000 0.000000 0.01 0.537693 0.518106 0.019587 3.642846 0.01 42.457196 41.255937 1.201260 2.829343 0.02 0.350078 0.340552 0.009526 2.721140 0.02 37.306205 36.598620 0.707585 1.896696 0.03 0.285615 0.277662 0.007953 2.784494 0.03 35.536372 34.948997 0.587375 1.652885 0.04 0.257790 0.247833 0.009957 3.862369 0.04 34.772453 34.166590 0.605863 1.742364 0.05 0.238437 0.226960 0.011476 4.813160 0.05 34.241098 33.619079 0.622019 1.816585 0.06 0.221383 0.210253 0.011130 5.027450 0.06 33.772897 33.180849 0.592048 1.753027 0.07 0.205707 0.196141 0.009567 4.650573 0.07 33.342522 32.810678 0.531843 1.595090 0.08 0.191317 0.183945 0.007372 3.853278 0.08 32.947422 32.490768 0.456654 1.386009 0.09 0.178184 0.173255 0.004928 2.765862 0.09 32.586853 32.210380 0.376473 1.155290 0.10 0.166260 0.163711 0.002549 1.533095 0.10 32.259500 31.960041 0.299459 0.928281 0.11 0.155477 0.155074 0.000403 0.259077 0.11 31.963452 31.733492 0.229960 0.719446 0.12 0.145749 0.147146 0.001396 0.958104 0.12 31.696375 31.525523 0.170852 0.539027 0.13 0.136983 0.139799 0.002816 2.055770 0.13 31.455683 31.332805 0.122879 0.390641 0.14 0.129079 0.132942 0.003863 2.992467 0.14 31.238686 31.152940 0.085747 0.274489 0.15 0.121941 0.126516 0.004575 3.751535 0.15 31.042716 30.984387 0.058329 0.187899 0.16 0.115476 0.120485 0.005009 4.337799 0.16 30.865217 30.826202 0.039016 0.126406 0.17 0.109597 0.114822 0.005225 4.767356 0.17 30.703819 30.677663 0.026156 0.085189 0.18 0.104227 0.109512 0.005285 5.070779 0.18 30.556374 30.538374 0.018000 0.058907 0.19 0.099295 0.104536 0.005241 5.277995 0.19 30.420981 30.407859 0.013123 0.043137 0.20 0.094743 0.099884 0.005141 5.425845 0.20 30.295990 30.285814 0.010176 0.033588 0.21 0.090518 0.095535 0.005017 5.542950 0.21 30.179990 30.171756 0.008234 0.027284 0.22 0.086577 0.091477 0.004900 5.659858 0.22 30.071794 30.065311 0.006483 0.021558 0.23 0.082884 0.087688 0.004804 5.795883 0.23 29.970415 29.965929 0.004485 0.014966 0.24 0.079410 0.084151 0.004741 5.970158 0.24 29.875038 29.873156 0.001882 0.006301 0.25 0.076131 0.080844 0.004713 6.190833 0.25 29.784996 29.786401 0.001405 0.004717 0.26 0.073026 0.077747 0.004722 6.465701 0.26 29.699745 29.705175 0.005430 0.018284 0.27 0.070079 0.074840 0.004761 6.793540 0.27 29.618837 29.628904 0.010068 0.033991 0.28 0.067277 0.072103 0.004826 7.173455 0.28 29.541904 29.557114 0.015210 0.051488 0.29 0.064608 0.069517 0.004909 7.598064 0.29 29.468640 29.489293 0.020653 0.070085 0.30 0.062064 0.067067 0.005003 8.061126 0.30 29.398787 29.425023 0.026237 0.089244 0.31 0.059636 0.064736 0.005100 8.552310 0.31 29.332122 29.363881 0.031760 0.108276 0.32 0.057317 0.062511 0.005195 9.063013 0.32 29.268451 29.305526 0.037075 0.126673 0.33 0.055100 0.060380 0.005280 9.582509 0.33 29.207599 29.249628 0.042029 0.143897 0.34 0.052981 0.058333 0.005352 10.102029 0.34 29.149408 29.195925 0.046517 0.159581 0.35 0.050953 0.056360 0.005407 10.612146 0.35 29.093733 29.144178 0.050445 0.173387

66
Table. B.7 the output results of u(r,t) or (TC 4) for the third model, h= k =1/100, s =100 and T =1.
Normalized Data Denormalized Data
t u Exp. u Theo. AED PE t u Exp. u Theo. AED PE 0.00 1.003257 1.060000 0.056743 5.655873 0.00 55.470000 55.470000 0.000000 0.000000 0.01 0.516712 0.517156 0.000444 0.085848 0.01 41.985245 41.228751 0.756494 1.801808 0.02 0.345297 0.337509 0.007788 2.255462 0.02 37.234405 36.515797 0.718608 1.929958 0.03 0.281910 0.275046 0.006864 2.434801 0.03 35.477607 34.877108 0.600499 1.692614 0.04 0.259282 0.250435 0.008847 3.412132 0.04 34.850478 34.231460 0.619017 1.776209 0.05 0.247898 0.236485 0.011412 4.603688 0.05 34.534949 33.865489 0.669460 1.938500 0.06 0.237799 0.225657 0.012141 5.105642 0.06 34.255051 33.581428 0.673622 1.966491 0.07 0.227744 0.215954 0.011790 5.176674 0.07 33.976383 33.326874 0.649510 1.911650 0.08 0.217748 0.206794 0.010954 5.030670 0.08 33.699351 33.086559 0.612792 1.818410 0.09 0.207891 0.198035 0.009856 4.741094 0.09 33.426152 32.856759 0.569393 1.703434 0.10 0.198244 0.189601 0.008643 4.359813 0.10 33.158774 32.635497 0.523278 1.578097 0.11 0.188868 0.181457 0.007411 3.923725 0.11 32.898926 32.421864 0.477063 1.450086 0.12 0.179815 0.173585 0.006230 3.464650 0.12 32.648026 32.215344 0.432682 1.325293 0.13 0.171126 0.165977 0.005149 3.008874 0.13 32.407197 32.015742 0.391455 1.207926 0.14 0.162830 0.158639 0.004191 2.573978 0.14 32.177279 31.823235 0.354044 1.100293 0.15 0.154949 0.151583 0.003366 2.172359 0.15 31.958838 31.638113 0.320725 1.003556 0.16 0.147493 0.144824 0.002668 1.809143 0.16 31.752190 31.460810 0.291380 0.917669 0.17 0.140465 0.138379 0.002087 1.485533 0.17 31.557422 31.291709 0.265713 0.841999 0.18 0.133862 0.132258 0.001605 1.198761 0.18 31.374421 31.131130 0.243291 0.775444 0.19 0.127674 0.126469 0.001205 0.943844 0.19 31.202905 30.979262 0.223642 0.716736 0.20 0.121884 0.121013 0.000871 0.714839 0.20 31.042451 30.836138 0.206313 0.664617 0.21 0.116475 0.115887 0.000588 0.505064 0.21 30.892528 30.701650 0.190878 0.617879 0.22 0.111424 0.111079 0.000344 0.308869 0.22 30.752522 30.575529 0.176993 0.575541 0.23 0.106706 0.106577 0.000129 0.120780 0.23 30.621766 30.457407 0.164360 0.536741 0.24 0.102296 0.102361 0.000064 0.062740 0.24 30.499561 30.346796 0.152765 0.500877 0.25 0.098170 0.098410 0.000240 0.244749 0.25 30.385199 30.243163 0.142035 0.467449 0.26 0.094301 0.094703 0.000402 0.426332 0.26 30.277979 30.145916 0.132063 0.436167 0.27 0.090666 0.091218 0.000551 0.608240 0.27 30.177224 30.054465 0.122759 0.406794 0.28 0.087241 0.087930 0.000689 0.789732 0.28 30.082289 29.968210 0.114079 0.379224 0.29 0.084004 0.084819 0.000815 0.970069 0.29 29.992573 29.886591 0.105982 0.353362 0.30 0.080935 0.081864 0.000929 1.147664 0.30 29.907522 29.809074 0.098448 0.329175 0.31 0.078016 0.079047 0.001031 1.321241 0.31 29.826633 29.735181 0.091452 0.306613 0.32 0.075232 0.076352 0.001120 1.489237 0.32 29.749454 29.664476 0.084978 0.285646 0.33 0.072566 0.073764 0.001198 1.650553 0.33 29.675586 29.596585 0.079002 0.266217 0.34 0.070008 0.071271 0.001263 1.804173 0.34 29.604681 29.531181 0.073499 0.248270 0.35 0.067546 0.068863 0.001317 1.949534 0.35 29.536436 29.467993 0.068443 0.231723

67
Table. B.8 the output results of u(r,t) or (TC 5) for the third model, h= k =1/100, s =100 and T =1.
Normalized Data Denormalized Data
t u Exp. u Theo. AED PE t u Exp. u Theo. AED PE 0.00 1.013008 1.060000 0.046992 4.638816 0.00 55.470000 55.470000 0.000000 0.000000 0.01 0.514252 0.516880 0.002628 0.510998 0.01 41.776086 41.220930 0.555156 1.328885 0.02 0.338693 0.336327 0.002366 0.698452 0.02 36.955911 36.484027 0.471884 1.276884 0.03 0.278213 0.273373 0.004839 1.739375 0.03 35.295361 34.832400 0.462961 1.311675 0.04 0.256274 0.250549 0.005725 2.233925 0.04 34.693020 34.233596 0.459424 1.324254 0.05 0.246257 0.240373 0.005883 2.389038 0.05 34.417974 33.966627 0.451347 1.311370 0.06 0.239420 0.233598 0.005821 2.431436 0.06 34.230255 33.788875 0.441380 1.289444 0.07 0.233082 0.227376 0.005705 2.447712 0.07 34.056240 33.625643 0.430597 1.264369 0.08 0.226508 0.220934 0.005574 2.460980 0.08 33.875763 33.456623 0.419141 1.237288 0.09 0.219561 0.214130 0.005432 2.473821 0.09 33.685028 33.278111 0.406916 1.208003 0.10 0.212278 0.207005 0.005272 2.483738 0.10 33.485042 33.091191 0.393851 1.176199 0.11 0.204743 0.199648 0.005095 2.488446 0.11 33.278164 32.898167 0.379997 1.141882 0.12 0.197054 0.192155 0.004900 2.486387 0.12 33.067067 32.701580 0.365487 1.105291 0.13 0.189308 0.184620 0.004689 2.476799 0.13 32.854398 32.503894 0.350504 1.066841 0.14 0.181596 0.177129 0.004466 2.459413 0.14 32.642630 32.307380 0.335250 1.027031 0.15 0.173996 0.169761 0.004235 2.434209 0.15 32.433981 32.114060 0.319921 0.986375 0.16 0.166580 0.162580 0.004000 2.401359 0.16 32.230358 31.925661 0.304697 0.945372 0.17 0.159404 0.155640 0.003764 2.361105 0.17 32.033326 31.743592 0.289733 0.904475 0.18 0.152511 0.148983 0.003529 2.313780 0.18 31.844093 31.568935 0.275158 0.864079 0.19 0.145934 0.142637 0.003298 2.259787 0.19 31.663517 31.402446 0.261071 0.824518 0.20 0.139692 0.136619 0.003073 2.199584 0.20 31.492124 31.244579 0.247545 0.786053 0.21 0.133792 0.130938 0.002855 2.133717 0.21 31.330140 31.095513 0.234627 0.748887 0.22 0.128234 0.125589 0.002645 2.062766 0.22 31.177531 30.955186 0.222345 0.713157 0.23 0.123008 0.120563 0.002445 1.987387 0.23 31.034045 30.823340 0.210705 0.678949 0.24 0.118099 0.115845 0.002254 1.908239 0.24 30.899265 30.699563 0.199702 0.646300 0.25 0.113488 0.111415 0.002072 1.826029 0.25 30.772649 30.583332 0.189317 0.615211 0.26 0.109151 0.107250 0.001901 1.741437 0.26 30.653577 30.474054 0.179524 0.585653 0.27 0.105065 0.103326 0.001739 1.655155 0.27 30.541386 30.371095 0.170291 0.557575 0.28 0.101205 0.099618 0.001587 1.567832 0.28 30.435406 30.273821 0.161585 0.530911 0.29 0.097547 0.096103 0.001444 1.480098 0.29 30.334982 30.181611 0.153371 0.505591 0.30 0.094069 0.092759 0.001310 1.392531 0.30 30.239498 30.093883 0.145615 0.481538 0.31 0.090751 0.089566 0.001185 1.305674 0.31 30.148386 30.010102 0.138284 0.458678 0.32 0.087573 0.086505 0.001068 1.220019 0.32 30.061139 29.929790 0.131349 0.436940 0.33 0.084520 0.083560 0.000960 1.136015 0.33 29.977312 29.852529 0.124783 0.416257 0.34 0.081577 0.080718 0.000860 1.054065 0.34 29.896523 29.777962 0.118560 0.396569 0.35 0.078734 0.077967 0.000767 0.974524 0.35 29.818450 29.705789 0.112660 0.377821

68
Table. B.9 the output results of u(r,t) or (TC 6) for the third model, h= k =1/100, s =100 and T =1.
Normalized Data Denormalized Data
t u Exp. u Theo. AED PE t u Exp. u Theo. AED PE 0.00 0.997600 1.060000 0.062400 6.255005 0.00 55.470000 55.470000 0.000000 0.000000 0.01 0.503579 0.516704 0.013126 2.606474 0.01 41.694202 41.216005 0.478197 1.146914 0.02 0.331800 0.335276 0.003476 1.047584 0.02 36.904153 36.456022 0.448131 1.214311 0.03 0.273343 0.270881 0.002462 0.900770 0.03 35.274075 34.766539 0.507536 1.438836 0.04 0.253848 0.248196 0.005652 2.226633 0.04 34.730457 34.171370 0.559087 1.609789 0.05 0.247344 0.242014 0.005329 2.154632 0.05 34.549074 34.009184 0.539889 1.562674 0.06 0.244917 0.242833 0.002084 0.850975 0.06 34.481417 34.030669 0.450748 1.307221 0.07 0.243557 0.245970 0.002413 0.990714 0.07 34.443483 34.112966 0.330517 0.959594 0.08 0.242253 0.249003 0.006750 2.786364 0.08 34.407127 34.192548 0.214579 0.623646 0.09 0.240667 0.250728 0.010061 4.180308 0.09 34.362904 34.237797 0.125107 0.364076 0.10 0.238685 0.250683 0.011998 5.026731 0.10 34.307626 34.236618 0.071008 0.206974 0.11 0.236270 0.248851 0.012580 5.324601 0.11 34.240291 34.188545 0.051747 0.151128 0.12 0.233418 0.245434 0.012016 5.147650 0.12 34.160770 34.098906 0.061865 0.181099 0.13 0.230142 0.240735 0.010594 4.603208 0.13 34.069396 33.975635 0.093761 0.275205 0.14 0.226463 0.235071 0.008608 3.800917 0.14 33.966819 33.827013 0.139806 0.411597 0.15 0.222415 0.228731 0.006316 2.839879 0.15 33.853940 33.660692 0.193248 0.570829 0.16 0.218037 0.221966 0.003929 1.801963 0.16 33.731863 33.483198 0.248665 0.737181 0.17 0.213374 0.214976 0.001602 0.750834 0.17 33.601840 33.299815 0.302025 0.898833 0.18 0.208475 0.207919 0.000555 0.266391 0.18 33.465218 33.114669 0.350549 1.047503 0.19 0.203388 0.200913 0.002476 1.217275 0.19 33.323385 32.930837 0.392547 1.177994 0.20 0.198164 0.194040 0.004124 2.081091 0.20 33.177712 32.750537 0.427176 1.287538 0.21 0.192850 0.187359 0.005490 2.846927 0.21 33.029512 32.575253 0.454259 1.375313 0.22 0.187488 0.180905 0.006583 3.511289 0.22 32.879992 32.405899 0.474093 1.441888 0.23 0.182117 0.174693 0.007424 4.076593 0.23 32.730228 32.242928 0.487300 1.488838 0.24 0.176771 0.168728 0.008042 4.549492 0.24 32.581143 32.086445 0.494698 1.518358 0.25 0.171476 0.163006 0.008470 4.939643 0.25 32.433499 31.936299 0.497201 1.532985 0.26 0.166254 0.157512 0.008743 5.258608 0.26 32.287896 31.792160 0.495737 1.535364 0.27 0.161122 0.152230 0.008892 5.518838 0.27 32.144783 31.653589 0.491194 1.528068 0.28 0.156090 0.147141 0.008949 5.733024 0.28 32.004470 31.520087 0.484383 1.513485 0.29 0.151166 0.142227 0.008939 5.913345 0.29 31.867151 31.391143 0.476008 1.493725 0.30 0.146352 0.137467 0.008885 6.071199 0.30 31.732925 31.266261 0.466664 1.470599 0.31 0.141650 0.132844 0.008806 6.216753 0.31 31.601816 31.144985 0.456832 1.445587 0.32 0.137060 0.128344 0.008716 6.358969 0.32 31.473800 31.026912 0.446888 1.419873 0.33 0.132577 0.123953 0.008625 6.505428 0.33 31.348817 30.911703 0.437114 1.394357 0.34 0.128202 0.119660 0.008541 6.662543 0.34 31.226794 30.799079 0.427715 1.369705 0.35 0.123929 0.115458 0.008471 6.835566 0.35 31.107651 30.688824 0.418827 1.346380

69
Table. B.10 the output results of p(t) for the third model, h= k =1/100, s =100 and T =1.
t p Exp. Itr. #
t p Exp. Itr. #
0.00 -83.000000 0 0.51 -22.541684 7 0.01 -57.363883 7 0.52 -23.543265 7 0.02 -32.473073 7 0.53 -24.602127 7 0.03 -16.520442 7 0.54 -25.722294 7 0.04 -8.619395 7 0.55 -26.907887 7 0.05 -4.726605 7 0.56 -28.163458 7 0.06 -3.042024 7 0.57 -29.493870 7 0.07 -2.474628 7 0.58 -30.904306 7 0.08 -2.468406 5 0.59 -32.400459 7 0.09 -2.765710 6 0.60 -33.988251 7 0.10 -3.198969 6 0.61 -35.674310 7 0.11 -3.690454 6 0.62 -37.465430 7 0.12 -4.191797 6 0.63 -39.369286 7 0.13 -4.679178 6 0.64 -41.393691 7 0.14 -5.142863 6 0.65 -43.547503 7 0.15 -5.577417 6 0.66 -45.839720 7 0.16 -5.983357 6 0.67 -48.280539 7 0.17 -6.361566 6 0.68 -50.880335 7 0.18 -6.714223 6 0.69 -53.650826 7 0.19 -7.044775 6 0.70 -56.603985 7 0.20 -7.355412 6 0.71 -59.753270 7 0.21 -7.650908 6 0.72 -63.112507 7 0.22 -7.933521 6 0.73 -66.697154 7 0.23 -8.208583 6 0.74 -70.523200 7 0.24 -8.478487 6 0.75 -74.608417 7 0.25 -8.748387 6 0.76 -78.971317 7 0.26 -9.020646 6 0.77 -83.632374 7 0.27 -9.299642 6 0.78 -88.613060 7 0.28 -9.587497 6 0.79 -93.937017 7 0.29 -9.887502 6 0.80 -99.629203 7 0.30 -10.201447 6 0.81 -105.716997 7 0.31 -10.531544 6 0.82 -112.229480 7 0.32 -10.879307 6 0.83 -119.198454 7 0.33 -11.246091 6 0.84 -126.657891 7 0.34 -11.633282 6 0.85 -134.644847 7 0.35 -12.041689 6 0.86 -143.199111 7 0.36 -12.472727 6 0.87 -152.363999 7 0.37 -12.926964 6 0.88 -162.186228 7 0.38 -13.405960 6 0.89 -172.716593 7 0.39 -13.910282 6 0.90 -184.010078 7 0.40 -14.441710 6 0.91 -196.126426 7 0.41 -15.000983 6 0.92 -209.130508 7 0.42 -15.590132 6 0.93 -223.092792 7 0.43 -16.210187 6 0.94 -238.089997 7 0.44 -16.863445 6 0.95 -254.205465 6 0.45 -17.551305 6 0.96 -271.530134 6 0.46 -18.276342 6 0.97 -290.162830 6 0.47 -19.040385 6 0.98 -310.211578 6 0.48 -19.846307 6 0.99 -331.793852 6 0.49 -20.696421 6 1.00 -355.038240 6 0.50 -21.593928 6

70
Table. B.11 the output results of u(r,z,t) for the fourth model, h= 1/100, k =1/100, s =100 and T =1.
r z u PDE u Theo. AED PE r z u Exp. u Theo. AED PE
0.00 0.00 7.389056 7.389056 0.000000 0.000000 0.51 0.51 20.496435 19.539262 0.957173 4.898715 0.01 0.01 7.540862 7.674973 0.134111 1.747385 0.52 0.52 20.897898 19.912614 0.985284 4.948038 0.02 0.02 7.698813 7.938104 0.239291 3.014460 0.53 0.53 21.307644 20.295732 1.011912 4.985838 0.03 0.03 7.861714 8.178859 0.317145 3.877621 0.54 0.54 21.725884 20.688970 1.036914 5.011916 0.04 0.04 8.029035 8.404588 0.375552 4.468419 0.55 0.55 22.152833 21.092550 1.060284 5.026816 0.05 0.05 8.200449 8.619647 0.419199 4.863295 0.56 0.56 22.588712 21.506797 1.081916 5.030576 0.06 0.06 8.375719 8.826926 0.451208 5.111720 0.57 0.57 23.033745 21.931978 1.101767 5.023566 0.07 0.07 8.554676 9.028275 0.473599 5.245736 0.58 0.58 23.488160 22.368382 1.119778 5.006076 0.08 0.08 8.737197 9.224921 0.487724 5.287023 0.59 0.59 23.952189 22.816311 1.135878 4.978361 0.09 0.09 8.923196 9.417893 0.494697 5.252737 0.60 0.60 24.426071 23.276005 1.150066 4.940992 0.10 0.10 9.112613 9.608045 0.495433 5.156434 0.61 0.61 24.910045 23.747750 1.162295 4.894339 0.11 0.11 9.305410 9.796017 0.490607 5.008230 0.62 0.62 25.404358 24.231937 1.172421 4.838330 0.12 0.12 9.501566 9.982366 0.480800 4.816492 0.63 0.63 25.909260 24.728950 1.180311 4.772991 0.13 0.13 9.701078 10.167664 0.466586 4.588918 0.64 0.64 26.425005 25.238945 1.186060 4.699325 0.14 0.14 9.903952 10.352384 0.448432 4.331680 0.65 0.65 26.951851 25.762255 1.189596 4.617594 0.15 0.15 10.110207 10.536998 0.426791 4.050405 0.66 0.66 27.490061 26.299226 1.190835 4.528025 0.16 0.16 10.319874 10.721910 0.402036 3.749665 0.67 0.67 28.039903 26.850220 1.189683 4.430814 0.17 0.17 10.532990 10.907437 0.374447 3.432950 0.68 0.68 28.601648 27.415442 1.186206 4.326780 0.18 0.18 10.749603 11.093977 0.344375 3.104158 0.69 0.69 29.175571 27.995323 1.180248 4.215876 0.19 0.19 10.969766 11.281827 0.312062 2.766057 0.70 0.70 29.761952 28.589850 1.172102 4.099712 0.20 0.20 11.193541 11.471296 0.277755 2.421305 0.71 0.71 30.361074 29.199951 1.161123 3.976457 0.21 0.21 11.420995 11.662706 0.241711 2.072509 0.72 0.72 30.973227 29.825293 1.147933 3.848858 0.22 0.22 11.652204 11.856385 0.204181 1.722115 0.73 0.73 31.598700 30.466589 1.132111 3.715909 0.23 0.23 11.887246 12.052520 0.165273 1.371277 0.74 0.74 32.237789 31.124223 1.113566 3.577811 0.24 0.24 12.126207 12.251391 0.125184 1.021796 0.75 0.75 32.890793 31.798790 1.092003 3.434103 0.25 0.25 12.369177 12.453270 0.084092 0.675264 0.76 0.76 33.558014 32.490019 1.067995 3.287149 0.26 0.26 12.616252 12.658482 0.042230 0.333610 0.77 0.77 34.239757 33.198179 1.041578 3.137457 0.27 0.27 12.867533 12.867122 0.000410 0.003189 0.78 0.78 34.936330 33.923719 1.012611 2.984964 0.28 0.28 13.123123 13.079552 0.043571 0.333126 0.79 0.79 35.648042 34.667376 0.980666 2.828786 0.29 0.29 13.383134 13.295968 0.087165 0.655577 0.80 0.80 36.375206 35.429187 0.946018 2.670167 0.30 0.30 13.647678 13.516619 0.131059 0.969614 0.81 0.81 37.118135 36.209154 0.908981 2.510361 0.31 0.31 13.916875 13.741687 0.175188 1.274862 0.82 0.82 37.877143 37.007445 0.869698 2.350062 0.32 0.32 14.190846 13.971464 0.219382 1.570218 0.83 0.83 38.652544 37.825218 0.827325 2.187232 0.33 0.33 14.469720 14.206180 0.263540 1.855106 0.84 0.84 39.444651 38.661603 0.783048 2.025388 0.34 0.34 14.753626 14.446041 0.307585 2.129199 0.85 0.85 40.253775 39.517872 0.735904 1.862204 0.35 0.35 15.042701 14.691255 0.351446 2.392211 0.86 0.86 41.080225 40.393222 0.687003 1.700787 0.36 0.36 15.337082 14.942108 0.394974 2.643364 0.87 0.87 41.924301 41.288469 0.635832 1.539976 0.37 0.37 15.636914 15.198812 0.438102 2.882474 0.88 0.88 42.786300 42.203462 0.582838 1.381018 0.38 0.38 15.942343 15.461576 0.480766 3.109426 0.89 0.89 43.666506 43.138221 0.528284 1.224631 0.39 0.39 16.253520 15.730667 0.522853 3.323783 0.90 0.90 44.565190 44.092981 0.472210 1.070940 0.40 0.40 16.570601 16.006276 0.564325 3.525649 0.91 0.91 45.482607 45.067301 0.415306 0.921524 0.41 0.41 16.893744 16.288672 0.605072 3.714680 0.92 0.92 46.418984 46.061237 0.357747 0.776677 0.42 0.42 17.223113 16.578055 0.645058 3.891033 0.93 0.93 47.374519 47.074015 0.300504 0.638365 0.43 0.43 17.558874 16.874735 0.684138 4.054216 0.94 0.94 48.349366 48.105707 0.243659 0.506507 0.44 0.44 17.901198 17.178917 0.722281 4.204462 0.95 0.95 49.343619 49.155009 0.188610 0.383704 0.45 0.45 18.250260 17.490853 0.759407 4.341740 0.96 0.96 50.357289 50.221009 0.136280 0.271361 0.46 0.46 18.606240 17.810803 0.795437 4.466035 0.97 0.97 51.390245 51.302076 0.088169 0.171862 0.47 0.47 18.969319 18.138997 0.830323 4.577557 0.98 0.98 52.442102 52.395498 0.046605 0.088948 0.48 0.48 19.339686 18.475696 0.863989 4.676356 0.99 0.99 53.512047 53.497179 0.014867 0.027791 0.49 0.49 19.717530 18.821126 0.896403 4.762751 1.00 1.00 54.598150 54.598150 0.000000 0.000000 0.50 0.50 20.103046 19.175509 0.927537 4.837095

71
Table. B.12 the lists output results of p(t) for fourth model, h= k =1/100, s =100 and T =1.
t p Itr. # t p Itr. # 0.00 -0.214134 4 0.51 -1.134739 4 0.01 -0.251490 4 0.52 -1.132031 4 0.02 -0.300329 4 0.53 -1.128967 4 0.03 -0.343955 4 0.54 -1.125570 4 0.04 -0.388990 4 0.55 -1.121859 4 0.05 -0.433300 4 0.56 -1.117856 4 0.06 -0.476426 4 0.57 -1.113577 4 0.07 -0.519227 4 0.58 -1.109043 4 0.08 -0.560360 4 0.59 -1.104268 4 0.09 -0.600513 4 0.60 -1.099270 4 0.10 -0.639101 4 0.61 -1.094064 4 0.11 -0.676216 4 0.62 -1.088665 4 0.12 -0.711806 4 0.63 -1.083085 4 0.13 -0.745721 4 0.64 -1.077340 4 0.14 -0.778081 4 0.65 -1.071440 4 0.15 -0.808736 4 0.66 -1.065399 4 0.16 -0.837805 4 0.67 -1.059228 4 0.17 -0.865218 4 0.68 -1.052936 4 0.18 -0.891049 4 0.69 -1.046535 4 0.19 -0.915302 4 0.70 -1.040035 4 0.20 -0.938016 4 0.71 -1.033444 4 0.21 -0.959239 4 0.72 -1.026772 4 0.22 -0.979000 4 0.73 -1.020027 4 0.23 -0.997360 4 0.74 -1.013217 4 0.24 -1.014351 4 0.75 -1.006349 4 0.25 -1.030036 4 0.76 -0.999432 4 0.26 -1.044453 4 0.77 -0.992471 4 0.27 -1.057661 4 0.78 -0.985474 4 0.28 -1.069703 4 0.79 -0.978447 4 0.29 -1.080634 4 0.80 -0.971396 4 0.30 -1.090499 4 0.81 -0.964327 4 0.31 -1.099349 4 0.82 -0.957246 4 0.32 -1.107230 4 0.83 -0.950157 4 0.33 -1.114186 4 0.84 -0.943065 4 0.34 -1.120265 4 0.85 -0.935976 4 0.35 -1.125508 4 0.86 -0.928895 4 0.36 -1.129959 4 0.87 -0.921824 4 0.37 -1.133655 4 0.88 -0.914770 4 0.38 -1.136639 4 0.89 -0.907736 4 0.39 -1.138945 4 0.90 -0.900726 4 0.40 -1.140611 4 0.91 -0.893744 4 0.41 -1.141671 4 0.92 -0.886793 4 0.42 -1.142159 4 0.93 -0.879878 4 0.43 -1.142106 3 0.94 -0.873000 4 0.44 -1.141542 4 0.95 -0.866165 4 0.45 -1.140496 4 0.96 -0.859374 4 0.46 -1.138996 4 0.97 -0.852632 4 0.47 -1.137069 4 0.98 -0.845940 4 0.48 -0.214134 4 0.99 -0.839303 4 0.49 -0.251490 4 1.00 -1.134739 4 0.50 -0.300329 4