Embed Size (px)
Citation preview

Philadelphia University
Engineering Faculty Mechanical Engineering Department
Eng. Laith Batarseh
Mechanical Vibrations Forced Vibration Systems

Harmonically Excited Vibration
Physical system
Equation of motion:
This equation is none – homogenous ODE
The solution of this equation involves the solution of the homogenous part (discussed in the Ch.2) and a particular solution
tFkxxcxm ...

Harmonically Excited Vibration
Homogenous part of mathematical model represents a
free vibration damped system:
As seen form the previous discussion for this type of
vibration, the amplitude will eventually dies out.
For steady state study of forced vibration, the particular
solution is the only solution remains in the seen.
0...
kxxcxm

Un-damped Forced Vibration System
Un-damped system:
Because the main cause of forced vibration in rotating
machinery is the unbalance, the most convenient and simple
form of forcing vibration F(t) = Fo cos(ωt). So, the governing
equation become:
The homogenous solution ( Free vibration):
x(t) = C1cos(ωnt) + C2sin(ωnt)
to find the particular solution, assume: xp(t) = Xcos(ωt)…Eq.2
where: X is constant that donates the maximum amplitude of
xp(t).
tFkxxm ..
1.cos..
EqtFkxxm o

Un-damped Forced Vibration System
Substitution of Eq.2 into Eq.1 to find X:
where: δst = Fo/k denotes the deflection of mass (m) under the
force Fo and it is called static deflection.
The general solution now become:
using the I.Cs:
22
1
n
sto
mk
FX
tmk
FtCtCtx o
nn
cossincos221
n
oo
ooo
xCxtx
mk
FxCxtx
.
.0
.
0
2
21

Un-damped Forced Vibration System
Substitution C1 and C2 in the general solution:
The ratio between maximum amplitude and the static
deflection (X/δst) can be expressed as:
As you can see, there are three possible cases:
When 0<r<1
When r>1
When r = 1. this case is called resonance and the amplitude of
vibration approaches the infinity.
tmk
Ft
xt
mk
Fxtx o
n
n
o
no
o
cossin
.
cos22
2
2
1111 rX
nst
Frequency ratio Magnification factor

Resonance
All cases:
At resonance
Particular solution

Un-damped Forced Vibration System
Total response:
A and ϕ can be determined as in the previous analysis of free
vibration:
1 cos1
cos
1 cos1
cos
2
2
rfortr
tAtx
rfortr
tAtx
stn
stn
22
2
2
2
2
1
.
n
ooo
x
mk
FxCCA
2
1
1
21
.
tantan
mkFx
x
C
C
oo
no
Homogenous solution

Un-damped Forced Vibration System
Example 3.1: Plate Supporting a Pump:
A reciprocating pump, weighing 68 kg, is mounted at the middle of a steel
plate of thickness 1 cm, width 50 cm, and length 250 cm. clamped along
two edges as shown in Fig. During operation of the pump, the plate is
subjected to a harmonic force, F(t) = 220 cos(62.832t) N. if E=200 Gpa,
Find the amplitude of vibration of the plate.

Un-damped Forced Vibration System
Example 3.1: solution
The plate can be modeled as fixed – fixed beam has the
following stiffness:
The maximum amplitude (X) is found as:
mNx
xxkSo
mxxxbhIBut
l
EIk
/ 82.400,10210250
10667.4110200192 ,
10667.41101105012
1
12
1
192
32
99
493223
3
mm
mk
FX o 32487.1
832.626882.400,102
2202
-ve means that the
response is out of
phase with
excitation

Damped Forced Vibration System
Damped system:
To find the particular solution, assume: xp(t) = Xcos(ωt – ϕ).
Substitute the assumed solution into the governing equation
and rearrange the terms:
Use the trigonometric relations
Therefore:
Solve for X and ϕ:
tFkxxcxm o cos...
tFtctmkX o cossincos2
sincoscossinsin
sinsincoscoscos
ttt
ttt
0cossin
sincos
2
2
cmkX
FcmkX o
222 cmk
FX o
2
1tan
mk
c

Damped Forced Vibration System
Divide this equation by k and make the
following substations:
You will eventually get:
222 cmk
FX o
m
kn
cc
c
k
Fost
n
r
2
1
222 1
2tan and
21
1
r
r
rr
X
st
Also called
amplitude ratio (M)

Damped Forced Vibration System
Graphical representation for X and ϕ.

Damped Forced Vibration System
Notes on the graphical representation for X.
For ζ = 0 , the system is reduced to become un-damped.
for any amount of (ζ) ; ζ > 0 , the amplitude of vibration
decreases (i.e. reduction in the magnification factor M). This is
correct for any value of r.
For the case of r = 0, the magnification factor equal 1.
The amplitude of the forced vibration approaches zero when the
frequency ration approaches the infinity (i.e. M→0 when r → ∞)

Damped Forced Vibration System
Notes on the graphical representation for ϕ.
For ζ = 0 , the phase angle is zero for 0<r<1 and 180o for r>1.
For any amount of (ζ) ; ζ > 0 and 0<r<1 , 0o<ϕ<90o.
For ζ > 0 and r>1 , 90o<ϕ<180o.
For (ζ) ; ζ > 0 and r=1 , ϕ= 90o.
For (ζ) ; ζ > 0 and r>>1 , ϕ approaches 180o.
Damped Forced Vibration System
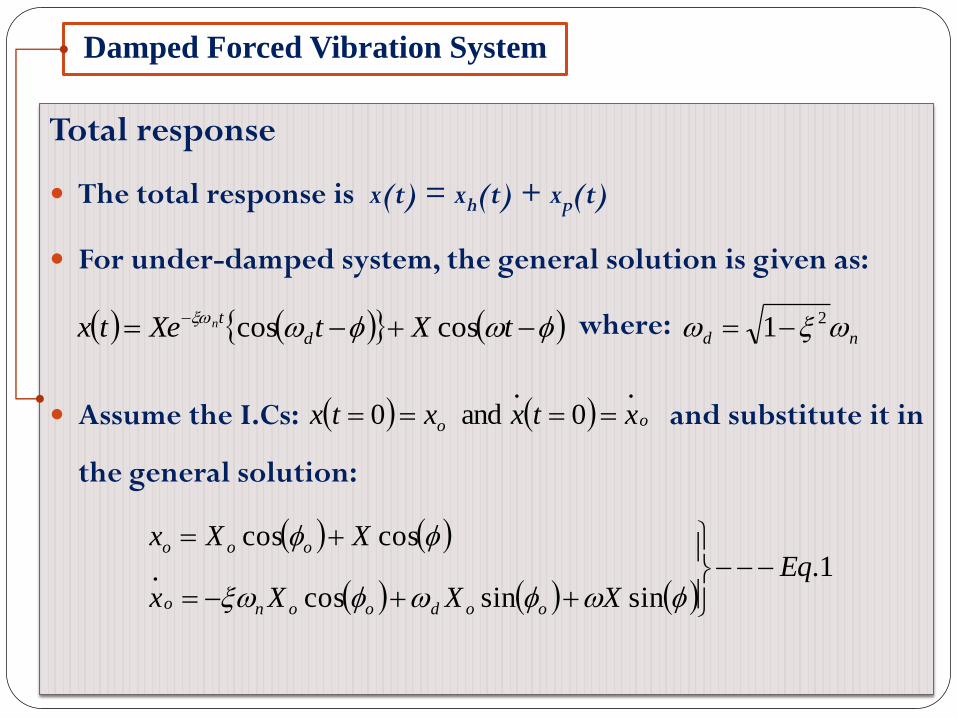
Total response
The total response is x(t) = xh(t) + xp(t)
For under-damped system, the general solution is given as:
where:
Assume the I.Cs: and substitute it in
the general solution:
tXtXetx d
tn coscos nd 21
oo xtxxtx.
0.
and 0
1.
sinsincos.
coscosEq
XXXx
XXx
oodoono
ooo

Damped Forced Vibration System
Total response
Solve the Eq.1 to find Xo and ϕo:
cos
sincos.
tan
sincos.1
cos
2
2
2
Xx
XXxx
XXxxXxX
od
oonoon
o
oonoon
d
oo

Damped Forced Vibration System
Example 3.2:
Find the total response of a single-degree-of-freedom system with m
= 10 kg, c = 20 N-s/m, k=4000 N/m, xo = 0.01m and = 0 under
the following conditions:
a. An external force F(t) = Focos(ωt) acts on the system with Fo = 100 N
and ω = 10 rad/sec
b. Free vibration condition : F(t) = 0
Solution
a. From the given data
ox.
sradm
kn /20
10
4000
05.0
20102
20
2
nm
c
sradd
d
nd
/975.19
2005.01
1
2
2
5.020
10
n
r

Damped Forced Vibration System
Example 3.2:
Solution
Using I.Cs to find Xo and ϕo
mk
Fost 025.0
4000
100
m
rr
X st 3326.0
21222
o
r
r814.3
1
2tan
2
1
o
od
oonoon
o
oonoon
d
oo
Xx
XXxx
XXxxXxX
587.5cos
sincos.
tan
0233.0sincos.1
cos
2
2
2

Damped Forced Vibration System
Example 3.2:
Solution
b. For free vibration:
Substitute the values of X and ϕ into the general solution :
o
no
ono
n
nooono
x
xx
xxxxX
866.21
.
tan
010012.01
.2
.
2
1
2
222
tXetx n
tn 21cos
tetx t 975.19cos010012.0

Base excitation
Example 3.2:
Solution
b. For free vibration:
Substitute the values of X and ϕ into the general solution :
o
no
ono
n
nooono
x
xx
xxxxX
866.21
.
tan
010012.01
.2
.
2
1
2
222
tXetx n
tn 21cos
tetx t 975.19cos010012.0

Forced Vibration System under Base Excitation
Physical system:
Mathematical model: 0....
yxkyxcxm
The forcing function for the base excitation

Forced Vibration System under Base Excitation
Substitute the forcing function into the math. Model:
The particular solution: xp(t) = Xcos(ωt – ϕ).
k
c
ckYA
Where
tAtYctkYkxxcxm
1
22
tan
:
sincossin...
This is harmonic
excitation force
22
31
22
31
222
2
222
22
141
2tantan
21
21
r
r
cmkk
mc
rr
r
cmk
ck
Y
X
Displacement
transmissibility

Forced Vibration System under Base Excitation
Graphical representation for X and ϕ.

Forced Vibration System due to Unbalance
Assume the following general case:
The centrifugal force equal meω2
The vertical component (meω2
sin(ωt) is the effective one because
the direction of motion is vertical.
the vertical component can be
moved to the center of rotation due
to vector definition.
The equation of motion can derived
as:
The derived equation of monition is
a harmonic excited vibrating
system which discussed before.
tmekxxcxm sin...
2

Forced Vibration System General Periodic force
In some cases, the external force F(t) is periodic with period:
τ=2π/ω.
Periodic force can expanded in Fourier series as:
Where:
The order of the expansion is (j)
As the number of terms increases, as the accuracy of
expanding increases.
11
sincos2 j
j
j
jo tjbtja
atF
0
0
.sin2
.cos2
dttjtFb
dttjtFa
j
j