Embed Size (px)
Citation preview

Introduction to Mathematical Biology –Undergraduate Course MATH 3350
Instructors: Ching-Shan Chou and Avner Friedman

Monday Wednesday Fridayweek 1 Chemostat model Matlab Tutorial Matlab Tutorialweek 2 Chemostat model Matlab – Solving ODEs Matlab – Solving ODEsweek 3 Linear differential
equationsPhase portrait (linear) Matlab – Solving
systems of ODEsweek 4 Phase portrait
(nonlinear)Chemostat Systems Matlab – Solving
systems of ODEsweek 5 Predator-pray Model Matlab Matlabweek 6 Competing population Multiple species
population modelMatlab
week 7 Study a research paper(TBD)
Study a research paper(TBD)
Study a research paper(TBD)
week 8 Spread of disease Spread of disease Matlab – Solving steadystate of ODEs
week 9 Neuronal signals Neuronal oscillations Matlab – Simulatingneuronal dynamics
week 10 Bifurcation theory Bifurcation theory Matlab – Simulatingbifurcation diagrams
week 11 Enzyme dynamics Enzyme dynamics Matlab – Simulatingenzyme dynamics
week 12 Cancer model Cancer model Matlab – Simulatingcancer models
week 13 Study a research paper(TBD)
Study a research paper(TBD)
Study a research paper(TBD)
week 14 Project Project Project
Table 2. Course Schedule
Homework: Students should submit the homework separately for the theoret-ical and numerical part to Dr. Friedman and Dr. Chou. Homework assignedthroughout the week (Mon, Wed, Fri) will be collected on the following Monday.Late Homework will not be accepted.
Grading: (1) Theoretical homework 40%, (2) Numeircal homework 40%, (2)Final Project 20%. The letter grade will be with an approximately 90(A)-80(B)-70(C)-60(D) scale.

Contents
Chapter 1. Bacterial Growth in Chemostat 5What is a chemostat? 7Modeling the chemostat 7Numerical Simulations 10
Chapter 2. Linear Differential Equations 13Numerical Simulations 15
Chapter 3. Phase Portrait 17Numerical Simulations 19
Chapter 4. The Chemostat Model Revisited 23Numerical Simulations 25
Chapter 5. Predator-Prey Models 27Numerical Simulations 28
Chapter 6. Two Competing Populations 30Numerical Simulations 31
Chapter 7. Multiple Species 33Numerical Simulations 36
Chapter 8. Spread of Disease 39HIV 42Numerical Simulations 43
Chapter 9. Transmission of Signals by Neurons 46Numerical Simulations 48
Chapter 10. Neuronal Oscillations 52Numerical Simulations 53
Chapter 11. Bifurcation Theory 54Numerical Simulations 59
Chapter 12. Enzyme Dynamics 61
Chapter 13. Cancer 66Numerical Simulations 69
Chapter 14. T Cell Differentiation 71Numerical Simulations 72
3

CONTENTS 4
Chapter 15. Tuberculosis 73

CHAPTER 1
Bacterial Growth in Chemostat
The density N of bacteria is defined as the number of bacteria per unit volume.If the bacteria grow at a fixed rate r, then
N(t+ ∆t)−N(t) = rN(t)∆t,
orN(t+ ∆t)−N(t)
∆t= rN(t),
and, taking ∆t→ 0, we get
(1.1)dN
dt= rN.
The explicit formula for the growth of N is then
N(t) = N(0) ert.
The doubling time T is defined by N(T ) = 2N(0), and it is given by
2 = erT , or T=ln2 /r.
If a colony of bacteria, or other microoganism, is dying at rate s, then its densityM satisfies
(1.2)dM
dt= −sM,
andM(t) = M(0)e−st.
The population density is halved at time T , called the half-life, given by
T =ln 2
s.
When bacteria are confined to a bounded chamber, they cannot grow expo-nentially forever, according to (1.1). There is going to be a carrying capacityB of the medium which the bacterial density cannot exceed. This is modeled byreplacing the exponential growth (1.1) by the logistic growth
(1.3)dN
dt= rN(1− N
B).
The solution of (1.3) with an initial condition
N(0) = N0
is given by
(1.4) N(t) =B
1 + ( BN0− 1)e−rt
.
5

1. BACTERIAL GROWTH IN CHEMOSTAT 6
Indded, to derive (1.3), we rewrite (1.1) in the formdN
N(1− NB )
= rdt,
or(
1
N+
1
B
1
1− NB
)dN = rdt,
and integrate to obtain
lnN − ln1
1− NB
= rt+ const.
ThenN
1− NB
= Cert,
yielding
N(t) =Cert
1 + CB e
rt=
B
1 + BC e−rt .
Substituting t = 0, N(0) = N0, we getB
C=
B
N0− 1.
Equation (1.1) is a special differential equation. Later on we shall encounteroften differential equations that model biological processes.
Consider a general differential equation
(1.5)dx
dt= f(x)
where f(x) is a continuous function together with its first derivative. We wish tosolve (1.5) with an initial condition
(1.6) x(0) = x0.
Theorem. 1.1. There exists a unique solution of (1.5), (1.6) for some interval0 ≤ t ≤ t1.
The soution can actually be continued for all t > 0 as long as f(x(t)) remainsbounded. Similarly, the solution can be continued to all t < 0 as long as x(t)remains bounded. One often refers to a solution of (1.5), x(t) for 0 ≤ t < ∞, as atrajectory.
If x0 is a point such that f(x0) = 0, then the unique solution of (1.5), (1.6)is clearly x(t) ≡ x0. Such a point x0 is called an equilibrium point, a steadystate or a stationary point. By Taylor’s formula,
f(x) = f(x0) + f ′(x0)(x− x0) + (x− x0)ε(x− x0)
where ε(x − x0) → 0 if x → x0. Suppose x0 is an equilibrium point such thatf ′(x0) < 0. Setting y = x− x0, we then have
dy
dt= f ′(x0)y + yε(y).
If |y| is small enough so that |ε(y)| < | 12f′(x0)|, then, for y > 0,
dy
dx< f ′(x0)y +
1
2|f ′(x0)|y = f ′(x0)y − 1
2f ′(x0)y =
1
2f ′(x0)y,

MODELING THE CHEMOSTAT 7
so thatdy
dt< 0 if y > 0.
Hence y = y(t) is decreasing toward y = 0. Similarly
dy
dt> 0 if y < 0,
so that y = y(t) is increasing toward y = 0.Hence the solution x(t), starting near x0, moves toward x0 as t increases; in
fact, x(t)→ x0 as t→∞. We therefore call x0 a stable equilibrium. Similarly, if
f ′(x0) > 0
then solutions initiating near x0 move away from x0, as long as they are within asmall distance from x0. We call such a point x0 an unstable equilibrium.
From (1.4), we see that N = B is actually a global stable point of (1.3) in thesense that no matter what N0 is, N(t)→ B as t→∞.
What is a chemostat?
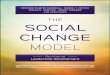
The chemostat, or bioreactor, is a continuous stirred-tank reactor (CSTR) usedfor continuous production of microbial biomass. It consists of a fresh water andnutrient reservoir connected to a growth chamber, or reactor, with microorganism.The mixture of fresh water and nutrient is pumped continuously from the reservoirto the reactor chamber, providing feed to the microorganism, and the mixture ofculture and fluid in the growth chamber is continuously pumped out and collected.The medium culture is continuously stirred. Stirring ensures that the contents ofthe chamber is well mixed so that the culture production is uniform and steady. Ifthe steering speed is too high, it would damage the cells in culture, but if it is toolow it could prevent the reactor from reaching steady state operation. Figure 1.1is a conceptual diagram of a chemostat.
Chemostats are used to grow, harvest, and maintain desired cells in a controlledmanner. The cells grow and replicate in the presence of suitable environment withmedium supplying the essential nutrient growth. Cells grown in this manner arecollected and used for many different applications.
These application include:Pharmaceutical: for example in analyzing how bacteria respond to different
antibiotics, or in production of insulin (by the bacteria) for diabetics.Food industry: for production of fermented food such as cheese.Manufacturing: for fermenting sugar to produce ethanol.
Modeling the chemostat
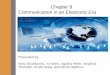
Figure 1.2 shows a schematics of a chemostat with a stock of nutrient C0
pumped into the chamber of the bacterial culture. We assume that the chemo-stat chamber is well stirred so that the nutrient concentration is constant at eachtime t. We then model the bacterial growth by the logistic equation (1.3), wherer depends on the constant nutrient concentration C0. If we denote by s the rateof the bacterial outflow from the chamber, then the balance between growth andoutflow is given by
(1.7)dN
dt= rN(1− N
B)− sN.

MODELING THE CHEMOSTAT 8
Figure 1.1. Stirred bioreactor operated as a chemostat, with acontinuous inflow (the feed) and outflow (the effluent). The rateof medium flow is controlled to keep the culture volume constant.
C0
Flow of nurient
Out!ow of bacteria
and nutrient
Bacterial
Culture Chamber
Figure 1.2. The chemostat device.
We shall denote by [X] the dimension of any quantity X. For example,
[N ] =numbervolume
, [B] =numbervolume
,
[r] =1
time, [s] =
1
time.
There are two equilibrium points to (1.7), namely, N = 0, and N = (1− sr )B. Note
that if s < r, then N = 0 is an unstable equilibrium, whereas N = (1 − sr )B is
a stable equilibrium. If s > r, then N = 0 is a stable equilibrium, whereas theequilibrium point N = (1− s
r )B is not biologically relevant since it is negative.Consider the case s < r and N(0) < (1 − s
r )B. Since (1 − sr )B is a stable
equilibrium, if N(0) is near (1− sr )B, it will remain smaller than (1− s
r )B and willconverge to it as t→∞. We can actually solve N(t) explicitly: writing
1
rN(1− NB )− sN
=1
r − s(
1
N+
r/B
(r − s)− rN/B)

MODELING THE CHEMOSTAT 9
we have1
r − s
[dN
N+
r/B
(r − s)− rN/BdN
]= dt.
By integration1
r − s[lnN − ln((r − s)− rN/B)] = t+ const,
orN
(r − s)− rN/B= ce(r−s)t (cis constant).
Hence(1
ce−(r−s)t +
r
B)N = r − s,
or
(1.8) N(t) =r − s
rB + 1
c e−(r−s)t .
We see that N(t)→ (1− sr )B as t→∞, whenever N(0) < (1− s
r )B. Note that theformula (1.8) is valid also when N(0) > (1− s
r )B and that c is determined by
N(0) =r − srB + 1
c
, or1
c=r − sN(0)
− r
B.
Problem. 1.1. Consider the equationdx
dt= xα, x(0) = 1
where 0 < α <∞. Show that (i) if α > 1 then the solution exists for 0 < t < 1α−1
and x(t) → ∞ as t → 1α−1 . (ii) if α < 1 then the solution exists for all t > 0 and
x(t)→∞ as t→∞.
Problem. 1.2. Consider the equationdx
dt= (x− a)(x− 2), a < 2.
Note that x = a is a stable equilibrium and x = 2 is an unstable equilibrium. Solvethe solution explicitly in the form t = t(x) when x(0) < a, and show that x(t)→ aas t→∞.
Problem. 1.3. Consider the equationdx
dt= x(x− a)(2− x) 0 < a < 2.
(1) Verify that x = 0 and x = 2 are stable equilibrium points, and x = a isan unstable equilibrium.
(2) Solve the equation explicitly in the form t = g(x), when x(0) > 2, anddeduce that x(t)→ 2 as t→∞.

NUMERICAL SIMULATIONS 10
Problem. 1.4. Consider the chemostats device in steady state with r and Bfixed. How would you choose the outflow rate s in order to maximize the bacterialoutput?
Numerical Simulations
In this chapter, we will introduce some basics of MATLAB and how to solvean ODE problem with MATLAB.
Baiscs of MATLAB – scalar calculations. MATLAB recognizes the usualarithmatic operation: + (addtion), - (subtraction), * (multiplication), / (division),^ (power). One can type in the command window after prompt sign (>>), andpress enter.
>> (5*2+3.5) / 5ans =2.7000Adding a semicolon will supress the answer. One can also store the result into
the variable that the user assigned, for example:>> x = (5*2+3.5) / 5x =2.7000MATLAB will take all the characters after the percentage sign (%) as comments
and those will not be executed, for example:>> x = (5*2+3.5) / 5^2 % store the result in variable z, and show the
result on the screen.If the operation is too long, one can use (...) to extend the command to the
next line, for example:>> z = 10*sin(pi/3)*...>> sin(pi^2/4)
Basics of MATLAB – vector and matrix operations. In the previousexamples, variables in MATLAB are used to store scalars. Actually, MATLABcan store vectors and matrices in variables and do the operations. Keep in mindthat MATLAB is a vector oriented program; if possible, design your codes in termsof vector-matrix operations. The following is an example to assign vectors in avariable:
>> s = [1 3 5 2]; % note the use of [], and the spaces between thenumbers
>> t = 2*s + 1t =3 7 11 5In the above example, MATLAB uses [] to establish a row vector [1 3 5 2] and
stores it in the variable s, and do operation on it to make a new row vector [3 7 115] and stores it in the variable t. MATLAB can also extract one element of part ofthe vector/matrix to do operations:
>> t(3) = 2t =3 7 2 5>> t(2:4) - 1ans =

NUMERICAL SIMULATIONS 11
6 1 -1Similarly to making vectors, users can make a m × n matrix, by adding a
semicolon ; after the end of each row>> A = [1 2 3 4; 5 6 7 8; 9 10 11 12]>> A(2,3) = 5 % change the (2,3) entry of A to 5>> B = A(2,1:3) % take the second row, the first to third column, store
as a new matrix B>> A =[A B’] % transpose B, make it as the last column vector and merge
with A>> A(:,2) = [] % delete the second row of A (: represents all the
rows, [] is an empty vector>> A = [A; 4 3 2 1] % adding the fourth row in the matrix A
Numerical algorithms of solving ODE. Most of the time, the solution ofan ODE problem does not have a closed-form solution. In this case, one looks fornumerical solutions that approximate the real solution. Since numerical solutionsare just approximations, it is important to understand the accuracy of the numericalmethod and robustness of it.
Suppose a scalar ODE isdy
dt= f(y, t) y(0) = y0, t ≥ 0.
Let t0 be some time point with t0 ≥ 0, then by integrating the ODE, one gets
y(t) = y(t0) +
ˆ t
t0
f(x, τ)dτ ≈ y(t0) + (t− t0)f(y(t0), t0).
As long as t is sufficiently close to t0, this provids a good approximation. Defind has the step size, we then diefine the numerical solution by
Yn+1 = Yn + hf(Y (tn), tn).
This is call Euler Method, named after Leonhard Euler (1707-1783). The error ofthis scheme is O(h), which can be formally derived from Taylor expansion. Gener-ally, a numerical scheme is called kth order accurate if the error is O(hk), where h isthe discretization size. Therefore, Euler method is first order accurate. Nowadays,there are many high order accurate schemes to solve ODE, but Euler method isstill a classical one as one first learn numerical methods. In the MATLAB, we havesome options of using Runge-Kutta methods to solve ODE systems, which will beintroduced in the following.
Using MATLAB to solve ODE. When solving ODE with MATLAB, weneed to represent f(y, t) as a “FUNCTION” in MATLAB, with the input t and y,and output dy. If we call teh FUNCTION file as “odefile.m”, the format of ODEis as follows: [t,y]=solver(’odefile’,[t0,t1],y0), where [t0, t1] is the timeinterval of interest, and y0 is the initial conditions. The options for the solver canbe found be look up “help” in MATLAB. For example:
>>[t,y]=ode45(’odefile’,[1,3],2)The above solves ODE with the prescibed f(y, t) in odefile.m, within the time
range [0, 1] and initial data y(1) = 2. Let us find out what is in that file:>> type odefile.mfunction dy = odefile(t,y)dy = y^2 + t;

NUMERICAL SIMULATIONS 12
Problem. 1.5. Try the following command to generate a vector x.
>> x = 0:0.01:2What is x , explain what you see in MATLAB. Then use the command>> y = sin(x)to generate another vector y, what is y?Using the above commands to plot the figure of f(x) = 2 sinx2 for 0 ≤ x ≤ 3,
with x incremented by 0.05 in the discretization.
Problem. 1.6. Write a code to solve the ODEdN
dt= N
(1− N
2
), 0 ≤ t ≤ 5,
with initial conditionN(0) = 0.5. Plot the numerical solution and the exact solutionon the same figure with different makers and different colors (refer to the numericalsection of Chapter 2 and Problem 1.5 for plotting).
Problem. 1.7. Solve the equation in Problem 1.4 with a = 1 numerically inthe form x = x(t) when (i) x(0) = 1
2 , (ii) x(0) = 32 .

CHAPTER 2
Linear Differential Equations
Consider a second order differential equation
(2.1) ad2x
dt2+ b
dx
dt+ cx = 0
where a, b, c are real constants and a 6= 0. The general solution is
x(t) = c1eλ1t + c2e
λ2t, c1, c2 are constants,
where λ1, λ2 are the solutions of the quadratic equation
aλ2 + bλ+ c = 0,
namely,
(2.2) λ1,2 =1
2a(−b±
√b2 − 4ac)
provided λ1 6= λ2. If λ1 = λ2 = − b2a , then the general solution is
x(t) = c1eλ1t + c2te
λ1t.
We can use the general solution to solve Eq. (2.1) subject to initial conditions
x(0) = α, x′(0) = β
(Verify that the solution is unique!).If b2 − 4ac is negative, then λ1 and λ2 are complex numbers,
(2.3) λ1,2 =1
2a(−b± i
√4ac− b2) = µ± iν
andeλ1,2t = eµt(cos νt± i sin νt).
Then the general solution can be written in the form
x(t) = c1eµt cos νt+ c2e
µt sin νt.
Consider next a 2× 2 linear system
(2.4)dx1
dt = a11x1 + a12x2dx2
dt = a21x1 + a22x2
We try to solve it in the form
x1 = v1eλt, x2 = v2e
λt.
Then
a11v1 + a12v2 = v1λ
a21v1 + a22v2 = v2λ.
13

2. LINEAR DIFFERENTIAL EQUATIONS 14
We can rewrite this system in matrix form
(2.5)(a11 − λ a12
a21 a22 − λ
)(v1
v2
)=
(00
),
or (A− λI)v = 0 where
A =
(a11 a12
a21 a22
), I =
(1 00 1
), v =
(v1
v2
).
A nonzero solution v exists if and only if λ satisfies the characteristic equation
(2.6) det(A− λI) = 0.
A solution λ of (2.6) is called an eigenvalue of A and a corresponding v is calledeigenvector. Eq. (2.6) can be written explicitly as
(2.7) λ2 − λ(a11 + a22) + (a11a22 − a12a21) = 0.
If the two eigenvalues λ1, λ2 are different, then the general solution of Eq. (2.4)is
(2.8) x(t) = c1w1eλ1t + c2w2e
λ2t,
where w1 and w2 are the eigenvectors corresponding to λ1 and λ2, respectively.By writing the roots λ1, λ2 of (2.7) in the form (2.2) or (2.3), we get that
Reλ1 < 0 and Reλ2 < 0 if and only if
(2.9) trace of A ≡ a11 + a22 < 0,determinant of A≡a11a22 − a12a21 > 0.
If λ1 = λ2, then there are two linearly independent eigenvectors satisfying (2.5),w1 and w2, and the general solution of Eq. (2.4) is
x(t) = c1w1eλ1t + c2w2te
λ1t.
In order to solve an inhomogeneous linear equation
(2.10) ad2x
dt2+ b
dx
dt+ cx = f(t)
with a given function f(t), we first find a special solution x(t) and, then, the generalsolution is a sum of x(t) and the general solution of the homogeneous equation. Thesame procedure applies to inhomogeneous linear systems.
Problem. 2.1. Find the general solution of x′′ + x′ − x = t2.
Problem. 2.2. Find the solution of x′′−4x′+3x = e−t with x(0) = 18 , x′(0) =
14 .
Problem. 2.3. Find the general solution ofdx1
dt= −2x1 + 7x2
dx2
dt= 2x1 + 3x2.

NUMERICAL SIMULATIONS 15
Problem. 2.4. Find the general solution ofdx1
dt= x1 − 2x2
dx2
dt= 2x1 + x2.
Numerical Simulations
Solving a second order ODE. To simulate a second order ODE with MAT-LAB, one can first convert it to a first order ODE system and use the usual ODEsolver. For example, to solve the equation
x′′ + bx′ + cx = f(t),
let y1 = x, y2 = x′, then the original ODE is equivalent to the systemdy1
dt= y2
dy2
dt= −cy1 − by2 + f(t)
that is,d
dt
(y1
y2
)=
(0 1−c −b
)(y1
y2
)+
(0f(t)
).
One can just use the ODE solver that we learned in Chapter 1 to solve this system.For example, to solve a ODE system
d
dt
(x1
x2
)=
(1 22 3
)(x1
x2
)+
(0t2
), 0 ≤ t ≤ 1,
with initial condition(x1(0)x2(0)
)=
(23
). In MATLAB, in the main script file,
one can typex_ini = [2,3]’;[t,x] = ode45(’odefile’, [0,1], x_ini);While in odefile.m, one hasfunction dx = odefile(t,x)A = [1,2; 2,3];dx = A*x + [0, t^2]’;
Plotting figures. Suppose x = [x1, x2, x3, · · · , xn] is a vector representingsampling points on x−axis and y = [y1, y2, y3, · · · , yn] represents the correspondingfunction values of components of x (note that x and y must be of the same length),then to plot x versus y, one uses
>> plot(x,y)To label the axis, we can use>> xlabel(’x’), ylabel(’y’)One can also specify the color and marker by addtng an option in the “plot”
function>> plot(x,y,’r o’) % this marks those point values by red circlesIf we would like to overlay two curves, x versus y and x versus z, where z =
[z1, z2, z3, · · · , zn], we can use>> plot(x,y,’r’,x,z,’b’) % mark the first y(x) function in red and
the second z(x) in blue.

NUMERICAL SIMULATIONS 16
or>> plot(x,y,’r’), hold on>> plot(x,z,’b’)The “hold on” command holds the first figure data and the second will be
plotted on top of the first one. Without this command, the previous data in thefigure will be overwritten.
Problem. 2.5. (a) Rewrite Problem 2.2 into first order systems. (b) Take theinitial condition to be x(0) = 1, x′(0) = 0, and the time interval 0 ≤ t ≤ 3. UseMATLAB to solve the system you get in (a), and plot the two variables on thesame figure.
Problem. 2.6. Solve y′′ − 5y′ = 0, y(0) = 1, y′(0) = 2, first explicitly, andthen numerically. Compare the two graphs of y(t) for 0 ≤ t ≤ 3.
Problem. 2.7. Solvedx1
dt= x1 − x2
dx2
dt= x1 + x2
with x1(0) = 1, x2(0) = 5, first explicitly and then numerically and compute thetwo graphs of x1(t) for 0 ≤ t ≤ 2.

CHAPTER 3
Phase Portrait
Set x = (x1, x2). The proint x = 0 is called an equilibrium point of (2.4),since the solution x(t) with x(0) = 0 is x(t) ≡ 0. We define the phase space forEqs. (2.4) as the (x1, x2)-space, and we want to draw the portrait of the trajectoriesin this space near x = 0, at least qualitatively. This can be done with the aid ofthe form (2.8) of the general solution. The protrait will depend on the eigenvaluesλ1, λ2 as follows.
Figures 3.1(B) and 3.1(E) show that when both eigenvalues have negative realparts, all the trajectories converge to x = 0; we say that x = 0 is a stableequilibrium. On the other hand, when at least one of the eigenvalues has positivereal part, there are always trajectories that go away from x = 0 even if they startinitially near x = 0; we say that x = 0 is an unstable equilibrium.
Recall (eq. (2.9)) that x = 0 is stable if and only if
a11 + a22 < 0,
a11a22 − a12a21 > 0.
x1
x2
x1
x2
x1
x2
x1
x2
x1
x2
x1
x2
(A) (B) (C)
(D) (E) (F)
Unstable Node Stable Node Saddle Point
Unstable Spiral Stable Spiral Center
(λ1>0, λ
2>0) (λ
1<0, λ
2<0) (λ
1>0, λ
2<0)
(λ1=α+iβ, α>0) (λ
1=α+iβ, α<0) (λ
1=iβ)
Figure 3.1. Phase portrait
17

3. PHASE PORTRAIT 18
The system (2.4) is linear. A general system of two differential equations hasthe form
(3.1)dx1
dt= f1(x1, x2),
dx2
dt= f2(x1, x2)
where f1(x1, x2), f2(x1, x2) are any given functions, not necessarily linear in x1, x2.A point (a, b) such that
f1(a, b) = 0, f2(a, b) = 0
is called an equilibrium point, a stationary point or a steady point of thesystem (3.1). The x1-nullcline of (3.1) is the curve consisting of points satisfyingthe equation
f1(x1, x2) = 0.
Similarly, the x2-nullcline is the curve defined by
f2(x1, x2) = 0.
The equilibrium points of the system (3.1) are the points where the two nullclinesintersect. To get an idea how trajectories behave near a stationary point (a, b), welinearize the system.
We setX1 = x1 − a, X2 = x2 − b.
Then, by Taylor’s formula,
fi(x1, x2) = fi(a+X1, b+X2) = fi(a, b) +∂fi∂x1
X1 +∂fi∂x2
X2 + small terms,
where∂fi∂x1
=∂fi∂x1
(a, b),∂fi∂x2
=∂fi∂x2
(a, b).
If we define
aij =∂fi∂xj
(a, b)
then the system (3.1) near (a, b) has the form
dXi
dt= ai1X1 + ai2X2 + small terms (i = 1, 2)
when X1, X2 are near 0. Hence the trajectories of (3.1) are expected to behaveapproximately like the trajectories of
(3.2)dXi
dt= ai1X1 + ai2X2, i = 1, 2.
Accordingly, the equilibriun point (a, b) of (3.1) is said to be stable if theequilibrium point x = 0 of (3.2) is stable, that is, if the real parts of eigenvalues ofthe matrix A = (aij) are negative.
We conclude that the equilibrium point (a, b) of the system (3.1) is stable ifand only if the following inequalities hold at (a, b):
(3.3)∂f1∂x1
+ ∂f2∂x2
< 0,∂f1∂x1
∂f2∂x2− ∂f1
∂x2
∂f2∂x1
> 0.
i.e., trace of(∂fi∂xj
)< 0 and determinant of
(∂fi∂xj
)> 0 .

NUMERICAL SIMULATIONS 19
Problem. 3.1. The systemdx
dt= x2 − y2
dy
dt= x(1− y)
has two nonzero equilibrium points (1, 1), (−1, 1). Find the eigenvalues of the Jaco-bian matrix for each of these points, and determine the behavior of the trajectoriesin terms of the classification described in the graphs in Fig. 3.1.
Problem. 3.2. Do the same for the systemdx
dt= x− xy2,
dy
dt= y + xy2 + 1
with its steady points (0,−1), (−2, 1).
Numerical Simulations
Plotting a phase diagram. A system of first order ordinary differential equationhas the general form
(3.4)
x′
1 = F1(t, x1, x2, ..., xn)
x′
2 = F2(t, x1, x2, ..., xn)...
x′
n = Fn(t, x1, x2, ..., xn)
(1) Highr order equations can be converted to system of first order equations; forexample,
u′′(t) + 16u
′(t) + 192u(t) = 0
can be converted to {x′
1 = x2
x′
2 = −16x2 − 192x1
by letting x1 = u and x2 = u′.(2) If it is a linear system, the general form can be written as
(3.5)
x′
1 = a11(t)x1 + a12(t)x2 + ...+ a1n(t)xn + b1(t)
x′
2 = a21(t)x1 + a22(t)x2 + ...+ a2n(t)xn + b2(t)...
x′
n = an1(t)x1 + an2(t)x2 + ...+ ann(t)xn + bn(t)
The system can be written as
x′ = A(t)x+ b(t)
where
x =
x1(t)x2(t)...
xn(t)
, b(t) =
b1(t)b2(t)...
bn(t)
, A(t) =
a11(t) a12(t) · · · a1n(t)a21(t) a22(t) · · · a2n(t)
...an1(t) an2(t) · · · ann(t)

NUMERICAL SIMULATIONS 20
Figure 3.2
(3) When A is a constant matrix and b = 0, the solution can be easily carriedout via eigenvalue and eigenfunction computation.
Example 1:
(3.6) x′
=
(1 14 1
)x
x = c1
(12
)e3t + c2
(1−2
)e−t
The origin is a saddle point and is unstable (Figure 3.2).In MATLAB, this is a simple one-line command to compute eigenvalue and
eigenvector.>> A=[1 1;4 1];>> [V,D]=eig(A)V =0.4472 -0.44720.8944 0.8944D =3.0000 0 0 -1.0000Example 2:
x′
=
(−3
√2√
2 −2
)x
x = c1
(1√2
)e−t + c2
(−√
21
)e−4t
The original is a stable node (Figure 3.3).
Example 3:
x′
=
(− 1
2 1−1 − 1
2
)x
x = c1
(cos(t)− sin(t)
)e−t/2 + c2
(sin(t)cos(t)
)e−t/2

NUMERICAL SIMULATIONS 21
Figure 3.3
Figure 3.4
The origin is a spiral point and is asymptotically stable (Figrue 3.4).Example 4:
x′
=
(1 −11 3
)x
x = c1
(1−1
)e2t + c2
[(1−1
)te2t +
(0−1
)e2t
]The origin is an improper mode, and is unstable (Figure 3.5).
Problem. 3.3. Give a 2 by 2 linear system that the origin is (a) unstable node,real eigenvalues and λ1 > 0, λ2 > 0 (b) stable node, real eigenvalues and λ1 < 0,λ2 < 0 (c) saddle point, real eigenvalues and λ1λ2 < 0 (d) unstable spiral, complexeigenvalues λ = α+ iβ and α > 0 (e) stable spiral, complex eigenvalues λ = α+ iβ

NUMERICAL SIMULATIONS 22
Figure 3.5
and α < 0 (f) center, λ = α + iβ and α = 0. For all the above systems, plot thedirectional fields for −3 ≤ x ≤ 3,−3 ≤ y ≤ 3.
Problem. 3.4. Solve numerically
x = xy − y, y = xy + x
with x(0) = 1, y(0) = 1, for 0 ≤ t ≤ 3.
Problem. 3.5. Solve numerically
x = x− xy2, y = y + xy2 + 1
with x(0) = 1, y(0) = 1, for 0 ≤ t ≤ 3.
Problem. 3.6. Solve numerically
x = −xy, y = (1− x)(1 + y)
with x(0) = 2, y(0) = 0, for 0 ≤ t ≤ 4.

CHAPTER 4
The Chemostat Model Revisited
In the model (1.6) of the bacterial growth in a chemostat we assumed thatthe nutrient concentration C in the chamber of the bacterial culture is constant,and we have therefore taken the growth rate r to be a constant. However, Cis actually time-dependent, and the growth rate of bacteria will depend on C. Inorder to develop a mathematical model of the chemostat we introduce the followingnotation:
V = volume of the bacterial chamber,C(t) = concentration of nutrients in the chamber,
r = rate of inflow and outflow,x = concentration of the bacteria in the chamber.
We assume thatmass of the bacteria formedmass of the nutrients used
= const. = γ;
γ is the yield constant. By conservation of nutrient mass
rate of change=input-washout-consumption.
Based on experimental evidence we take the rate of bacterial growth to bem0C
a+ Cx,
which m0 and a are constants, and the rate of nutrient consumption to bem0C
a+ C
x
γ,
since mass 1/γ of the bacteria is formed from consumption of mass 1 of nutrients.Then
(V C)′(t) = C0r − C(t)r − m0C
a+ C
x
γ.
Dividing both sides by V and setting D = r/V (the dilution rate), we get
(4.1) C ′ = (C0 − C)D − mC
a+ C
x
γ
where m = m0/V . The bacterial growth is given by
(4.2) x′ = x
(mC
a+ C−D
).
Note that the units of C0, C, a, x are mass/volume (e.g. gm/cm3), and the unitsof m and D are 1/time (e.g. 1/sec); γ is a dimensionless parameter.
By scaling
23

4. THE CHEMOSTAT MODEL REVISITED 24
C =C
C0, x =
x
γC0, t = Dt
we can simplify the system (4.1) and (4.2). After dropping the bars over C and x,we then obtain (with new constants m = m
D , a = aC0
):
(4.3)C ′ = 1− C − mCx
a+C
x′ = x(mCa+C − 1
)Problem. 4.1. The steady states of (4.3) are (C1, x1) = (1, 0) and (C2, x2) =
(λ, 1− λ) where λ = am−1 , provided m > 1, λ < 1. Prove
(i) (C1, x1) is stable if ma+1 < 1.
(ii) (C2, x2) is stable.
To biologically interpret the mathematical results of Problem 4.1 we return tothe original parameters, and consider for example the role of the dilution D. Setting
D0 =m0/V
a/C0 + 1.
We havem
a+ 1=
(m0/V ) /D
a/C0 + 1=D0
D.
If D > D0 then m/ (a+ 1) < 1, so that (C1, x1) = (1, 0) is stable, and in steadystate the chemostat does not produce any bacteria, that is, if D > D0 then there isa washout. On the other hand, if D < D0 then m/ (a+ 1) > 1, so that m > 1 andλ < 1; hence, in steady state the chemostat yields bacteria at the (scaled) amount1 − λ, and one can adjust the parameter D, or other parameters of the model, toobtain the desired amount of bacteria per nutrient.
Since t = Dt, we havedx
dt=dx
dt
dt
dt= D
dx
dt
for the effluent x. Hence in steady state when the bacterial yields is 1 − λ in unittime t, the actual bacterial yield per unit time (when D < D0) is
D (1− λ) = D
(1− a
m− 1
)= D
(1− aV D
C0(m0 − V D)
)≡ f(D).
Hence, to maximize the bacterial harvest one should take the dilution rate D suchthat f(D) becomes maximum in hte interval 0 < D < D0.
Problem. 4.2. Prove that the maximum of f(D) is attained at the smaller ofthe two positive solutions of the quadratic equation
αD2 + βD +m20 = 0,
where α = V (M + V ), β = −2m0(M + V ),M = aV/C0.

NUMERICAL SIMULATIONS 25
Problem. 4.3. Consider another model of a chemostat, given bydN
dt= CN −N,
dC
dt= −CN − C + β, (β > 1).
There are two equilibrium points: (0, β) and (β−1, 1). Show that (0, β) is unstableand (β − 1, 1) is stable.
Numerical Simulations
Revisiting Euler method for solving ODE – consistency and conver-gence. Suppose the system of ODEs we would like to solve is
(4.4)dx
dt= f(x, t), t ≥ t0, x(t0) = x0
where f is a Lipschitz function in x and t and the initial condition x0 is a givenvalue in R. Note that even now we consider a single equation where x is a scalar,the discussion in the following can be easily generalized to systems in which x andf represent vectors. There are various ways to derive Euler method, here we giveone derivation based on linear interpolation.
Integrating Eq. (4.4) from t1 to t1 + h, with t1 > t0, one abtains
x(t1 + h) = x(t1) +
ˆ t1+h
t1
f(x(τ), τ)dτ.
If we approximate the integral by hf(x(t1), t1), which would be a good approxima-tion given h sufficiently small, then
x(t1 + h) ≈ x(t1) + hf(x(t1), t1).
Thus, we have the forward Euler method by denoting Xj as the numerical solutionat time tn, j = 1, · · · , N , where tn are equi-distanced grid points with t0 < t1 <· · · < tN and h = tn+1 − tn,(4.5) Xn+1 = Xn + hf(Xn, tn).
This type of scheme is call explicit scheme because the solution Xn+1 is explicitlydefined in function of Xn. In other words, knowing Xn, one can explicitly computeXn+1. Furthermore, it is called a single step method because it requires onlysolution at one time step in order to compute the solution at the following timestep.
In order to understand how good the numerical solution is, we define localtruncation error to measure how closely the difference operator approximatesthe differential operator, for Euler method:
dn =x(tn+1)− x(tn)
h− f(x(tn), tn) =
h
2x′′(tn) +O(h2).
where tn is some point in the interval [tn, tn+1]. If a method has the local truncationerror O(hp), we say that the method is pth order accurate.
However, the real goal is not consistency but convergence. Assume Nh isbounded independent of N . The method is said to be convergent of order p ifthe global error en, where en = Xn − x(tn), e0 = 0, satisfies
en = O(hp), n = 1, 2, · · · , N.

NUMERICAL SIMULATIONS 26
Problem. 4.4. Consider the scalar problem
y′ = −5ty2 +5
t− 1
t2, y(1) = 1.
(a) Verify that y(t) = 1t is a solution to the problem. (b) Use forward Euler method
until t = 10. Compute the error between the numerical solution and exact solutionusing h = 0.002, 0.004, 0.008, 0.016. From the errors, what can you say about theorder of the scheme?

CHAPTER 5
Predator-Prey Models
We denote by x the density of a prey, that is, the number of prey animals perunit area on land (or volume in sea) and by y the density of predators. We denoteby a the net growth rate in x (birth minus natrual death), and by c the net deathrate of predators. The growth of predators is assumed to depend only on the preyas food. Predation occurs when predator comes into close contact with prey, andwe take this encounter to occur at an average rate b. Hence
(5.1)dx
dt= ax− bxy.
In terms of dimensions,
[a] =1
time, [b] =
1
density of predator1
time.
The growth of predators is proportional to bxy, so that
(5.2)dy
dt= −cy + dxy.
The system (5.1), (5.2) has two equilibrium points. The first one is (0, 0);this corresponds to a situation where both species die. This equilibrium point isunstable.
Problem. 5.1. Show that the equilibrium point is ( cd ,ab ); hence the popula-
tions (x(t), y(t)) vary periodically, and they never become extinct.
Eqs. (5.1), (5.2) are examples of what is known as Lotka-Volterra equations.One can introduce various variants into these equations. For example, if the preypopulation is quite conjested, we may want to use the logistic growth, and write
(5.3)dx
dt= ax(1− x
B)− bxy.
More general models of predator-prey are written in the form
dx
dt= xf(x, y),
dy
dt= yg(x, y)
where x is the prey and y is the predator, ∂f/∂y < 0, ∂g/∂x > 0, and ∂f/∂x < 0for large x, ∂g/∂y < 0 for large y. The first two inequalities mean that the preypopulation is depleted by the predator and the predator population is increased byfeeding on the prey. The last two inequalities represent natural death due to thelogistic growth model. In the following example x = m, y = b.
When micobacteria tuberculosis (Mtb) are inhaled, they enter the lung wherethey are endocytosed by macrophages. The bacteria grow in these cells and causethem to die. We denote the density of bacteria in the lung by b and the density of
27

NUMERICAL SIMULATIONS 28
macrophages by m. The bacteria undergo logistic growth with carrying capacitywhich is limited by the density of macrophages,
(5.4)db
dt= rb(1− b
m+ 1).
The macrophages also grow logistically, but they are killed by the bacteria atrate γ,
(5.5)dm
dt= sm(1− m
M)− γbm.
Problem. 5.2. (a) Show that the system (5.4), (5.5) has a steady state (b, m)with b > 0, m > 0 if and only if γ < s, and that it is stable.
Consider a predator-prey model where the prey is subject to the Allee effect,
(5.6)dx
dt= rx(x− α)(1− x)− xy, (0 < α < 1),
that is, if the population x decreases to the level x = α, then thereafter x(t) willcontinue to decrease, and x(t) will go to zero as t→∞. The predator y satisfies
(5.7)dy
dt= xy − δy.
Problem. 5.3. The system (5.6)-(5.7) has two equilibrium points: (0, 0) and(x, y) = (δ, r(δ−α)(1− δ)), if α < δ < 1. Show that (0, 0) is stable, and that (x, y)is stable if δ > 1+α
2 .
Numerical Simulations
The following algorithms code (5.1)-(5.2). These codes also demonstrate howto implement nonlinear systems (see fun_predator_prey.m). Also note that inmodel_predator_prey.m, when we plot both x and y variables, we use “subplot”command. The “subplot” allows one to plot more than one subfigures in one plot.Its argument (m,n, k) stands for total number of rows, total number column andthe place of the subfigurem respectively. You can type
>> help subplotto see how to use it.
Problem. 5.4. Plot the time evolution of model of equations (5.1)-(5.2) witha = 5, b = 2, c = 9, d = 1 starting from (10, 5), for time from 0 to 5.
Problem. 5.5. Draw the phase portrait for (5.1), (5.2) with a = 5, b = 2, c =9, d = 1 starting from several points near (9, 3/2).
Problem. 5.6. The only nonzero steady point of (5.2), (5.3) is ( cd ,ab −
acbdB ); it
is biologically meaningful only if 1− cdB > 0, and it is a stable spiral. Draw several
trajectories when a = b = c = d,B = 2.
Problem. 5.7. Draw the phase diagram for (5.2), (5.3) in case a = b = c =d,B = 1
2 .

NUMERICAL SIMULATIONS 29
Algorithm 1 model_predator_prey.m% This code simulates model (5.1)-(5.2).close all,clear all,% define global parametersglobal a b c d% starting and final timet0 = 0; tfinal = 5;% paramtersa = 5; b = 2; c = 9; d = 1;% initial conditionsv0 = [10,5];[t,v] = ode45(’fun_predator_prey’,[t0,tfinal],v0);subplot(1,2,1)plot(t,v(:,1)) % plot the evolution of xxlabel t, ylabel xsubplot(1,2,2)plot(t,v(:,2)) % plot the evolution of yxlabel t, ylabel y
Algorithm 2 fun_predator_prey.m% This is the function file called by model_predator_prey.mfunction dy = ffun_predator_prey(t,v)global a b c ddy = zeros(2,1);dy(1) = a*v(1) - b*v(1)*v(2);dy(2) = -c*v(2) + d*v(1)*v(2);
Problem. 5.8. Change the codes (adding one more global parameter B, andchange dy(1) in fun_predator_prey.m) to implement (5.2)-(5.3). Plot the timeevolutionwith a = 5, b = 5, c = 5, d = 5, B = 0.5 starting from (2, 3), for time from0 to 5.

CHAPTER 6
Two Competing Populations
The Lotka-Volterra equations for the predator-prey model can be applied topopulations of animals, vegetations, microorganisms, etc. In this chapter, we con-sider a situation where instead of one population feeding on the other, each popula-tion is competing with each other by partially depleting (or killing) their competitor.A Lotka-Volterra model for this situation is given by
dx
dt= r1x(1− x
k1)− b1xy,(6.1)
dy
dt= r2y(1− y
k2)− b2xy.(6.2)
This system has equilibrium points
(6.3) (0, 0), (k1, 0), (0, k2).
Note that the equilibrium point (k1, 0) means that the second population becomesextinct. Similarly, (0, k2) corresponds to a situation where the first populationbecomes extinct.
In order to determine whether there exist additional equilibrium points, wemust solve the equations
r1(1− x
k1)− b1y = 0,
r2(1− y
k2)− b2x = 0.
The solution is given by
(6.4) (β1k2 − k1
β1β2 − 1,β2k1 − k2
β1β2 − 1) where βi =
kibiri
, (i = 1, 2).
This steady point is of biological relevance only if the two components arepositive, which occurs only when either
k1 >r2
b2, k2 >
r1
b1or
k1 <r2
b2, k2 <
r1
b1.
Problem. 6.1. Determine whether the equilibrium points in (6.3) are stable.
Problem. 6.2 Show that the point defined in (6.4) is the unique equilibriumpoint (x, y) of (6.1) with x 6= 0, y 6= 0. Is it stable?
30

NUMERICAL SIMULATIONS 31
Consider two populations of animals, x and y, grazing in the same region.Assuming logistic growth, the carrying capacity of each population is limited bythe availability of food, which depends on x and y. This situation is modeled bythe equations
dx
dt= λ1x(1− x
K − x− y)− x,(6.5)
dy
dt= λ2y(1− y
K − x− y)− y,(6.6)
where λ1 > 1, λ2 > 1,K > 0.
Problem. 6.3. Show that the point
x =K
λ1 + λ2 − 1, y =
λ2 − 1
λ1 − 1x
is a steady state of (6.5) and (6.6), and determine whether it is stable.
Another competition model is given by the equations
dx
dt= λx(1− x+ αy
K)− x,(6.7)
dy
dt= λy(1− βx+ y
K)− y,(6.8)
where λ > 1 and α, β,K are positive constants.
Problem. 6.4. Prove that the system (6.7), (6.8) has a steady state (x, y) ifα < 1, β < 1 or if α > 1, β > 1, and the steady state with α < 1, β < 1 is stable.
Numerical Simulations
Backward Euler Method. While forward Euler method allows one to com-pute the numerical solution explicitly, backward Euler method is an implicit methodin which one may have to solve a system of nonlinear equations. Given the equation
dx
dt= f(x, t), t ≥ t0, x(t0) = x0,
if we denote Xj as the numerical solution at time tn, j = 1, · · · , N , where tn areequi-distanced grid points with t0 < t1 < · · · < tN and h = tn+1− tn, the backwardEuler Method is
(6.9) Xn+1 = Xn + hf(Xn+1, tn+1).
Note that the difference between forward Euler and backward Euler is that we areusing unknown Xn+1 in function f of Eq. (6.9). To solve Eq. (6.9), one needs tosolve
Xn+1 − hf(Xn+1, tn+1) = Xn,
which may require a nonlinear solver to solve this system. Recall that in the forwardEuler method (4.5), Xn+1 is directly computed from the right-hand-side using Xn.

NUMERICAL SIMULATIONS 32
Why would we want to use an implicit method which involves time consumingnonlinear solvers? The reason is “stability”. Consider the test equation y′ = λy,the backward Euler for that equation is
Xn+1 = Xn + hλXn+1,
therefore(1− hλ)Xn+1 = Xn,
andXn+1 =
Xn
1− hλ.
Because we assume λ < 0, we have |Xn+1| < |Xn| regardless of the choice of h. Inother word, this scheme is stable for every h! We call this scheme “unconditionallystable”. This scheme is very useful if one requires a very small time step h to obtaina stable numerical solution with explicit scheme. In that case, solving nonlinearsystems will pay off by gaining stability.
Problem. 6.5. Considerdy
dt= −10y, y(0) = 1, 0 ≤ t ≤ 3.
(i) Impliment backward Euler method, use h = 0.01, 0.05, 0.1, 0.2. Compare thosesolutions with the exact solution. (ii) Use h = 0.21 in forward Euler and backwardEuler methods, and compare both numerical solutions with exact solutions in onefigure. (iii) Use h = 0.3 in forward Euler and backward Euler methods, what doyou see. Plot your numerical solutions if possible.
Problem. 6.6. Implement the backward Euler method fordy
dt= −y + t, y(0) = 1, 0 ≤ t ≤ 1.
Compare your numerical solution with the exact solution (you need to derive your-self).
In MATLAB, there are also implicit methods that would efficiently and robustlycalculate stiff problems. The widely used function is called “ode15s”. Consider astiff problem
d
dt
[x1
x2
]=
[−1 −11 −5000
] [x1
x2
](6.10)
with initial conditions [x1
x2
]=
[11
].
Problem. 6.7. (a) Solve (6.10) with the initial condition with “ode45” inmatlab. Compute the CPU time with “tic” and “toc”. (b) Repeat (a) with “ode15s”.

CHAPTER 7
Multiple Species
In biology we frequently have more than two species. For example, if we intro-duce two competing propulations of lions (x) and hyenas (y) as predators, and apopulation of zebras (z) as prey, we then have a model with three equations
dx
dt= r1x(1− x
k1)− b1xy + β1xz
dy
dt= r2y(1− y
k2)− b2xy + β2yz(7.1)
dz
dt= az(1− z
B)− γ1xz − γ2yz.
In this chapter, we develop a theory for a system of differential equations thatwill be used to study models with many species. We write the system either as
(7.2)dxidt
= fi(x1, x2, · · · , xn), i = 1, 2, · · · , n
or, in vector notation,
(7.3)dx
dt= f(x)
where x = (x1, · · · , xn), f = (f1, · · · , fn).A point x0 = (x01, · · · , x0n) such that f(x0) = 0 is called an equilibrium
point, a stationary point or a steady point, of the system (7.2). The uniquetrajectory x(t) with x(0) = x0 is then x(t) ≡ x0, for all t ≥ 0.
Writing
fi(x) = fi(x0) +
n∑j=1
(xj − xj0)
[∂fi∂xj
+ εj(|x− x0|)]
where εj(s)→ 0 if s→ 0, we see that the linear system of differential equations
(7.4)dxidt
=
n∑j=1
aij(xj − xj0), (aij =∂fi(x0)
∂xj)
is a good approximation to (7.2) near x = x0. As in the analysis in Chapters 2 and3, we wish to determine under what conditions all solutions of (7.4) converge to x0
as t→∞, and in this case we call x0 a stable equilibrium point.We try to find solutions of (7.4) in the form veλt where v = (v1, v2, · · · , vn).
Then λ and v must satisfy the equations
(7.5)n∑j=1
(aij − λδij)vj = 0, j = 1, · · · , n
33

7. MULTIPLE SPECIES 34
or, in matrix form,
(7.6) (J − λI)v = 0
where I is the unit matrix, with elements δij = 0 if i 6= j, δii = 1, and the matrixJ is given by
J =
∂f1∂x1
∂f1∂x2
· · · ∂f1∂xn
...∂fn∂x1
∂fn∂x2
· · · ∂fn∂xn
where ∂fi
∂xjis computed at x0; we also write J = ( ∂fi∂xj
). The matrix J is called theJacobian matrix.
The system (7.5) has a solution v 6= 0 if and only if λ satisfies the equation
(7.7) det(aij − λδij) = 0.
This polynomial equation is called the characteristic equation, and the solu-tions λ are called eigenvalues. A solution v of (7.6) is called an eigenvectorcorresponding to λ.
Equation (7.7) is a polynomial equation of order n,
(7.8) λn + a1λn−1 + · · ·+ an−1λ+ an = 0.
It is well known that such an equation has n solutions, which may be real orimaginary. If all the eigenvalues λ1, λ2, · · · , λn are different from one another, thenthe general solution of the linear system (7.4) is
x(t) =
n∑j=1
cjvjeλjt,
where vj are eigenvectors corresponding to λj , and the cj are arbitrary constants.If λ1 = λ2 then we need to replace c2v2e
λ2t by c2tv2eλ1t where v2 is an eigen-
vector which is linearly independent of v1; if λ1 = λ2 = λ3, then we replace c3v3
by c3t2v3, where v3 is linearly independent of v1 and v2, etc.We conclude that if the real parts of all the eigenvalues are negative, then
x(t) → 0 as t → ∞. Since the linear system is a good approximation to the fullsystem (7.2) near the point x0, we have the following result:
Theorem. 7.1. If Reλj < 0 for each eigenvalue of the Jacobian matrix at x0,then the point x0 is a stable equilibrium point for (7.2).
That means that any trajectory x(t), with x(0) near x0, converges to x0 ast→∞.
The next question is under what conditions on the coefficients a1, a2, · · · , an isit true that Reλj < 0 for all j. The answer is provided by the well known criteriaof Routh-Hurwitz, which can be stated in terms of the following matrices:
A1 = (a1), A2 =
(a1 1a3 a2
), A3 =
a1 1 0a3 a2 a1
a5 a4 a3
,

7. MULTIPLE SPECIES 35
Aj =
a1 1 0 0 · · · 0a3 a2 a1 1 · · · 0a5 a4 a3 a2 · · · 0...
...a2j−1 a2j−2 a2j−3 a2j−4 · · · aj
, 4 ≤ j ≤ n,
where the (l,m) term in the matrix Aj is defined as follows:
a2l−m if 0 < 2l −m ≤ n1 if 2l −m = 0
0 if 2l −m < 0 or 2l −m > n.
Theorem. 7.2. (Routh-Hurwitz) All the zeros of (7.8) have negative real partsif and only if
(7.9) detAj > 0, for j = 1, 2, · · · , n.
Problem. 7.1. Prove that the Routh-Hurwitz criteria is satified (i) for n = 3,if a1 > 0, a3 > 0 and a1a2 > a3; (ii) for n = 4, if a1 > 0, a3 > 0, a4 > 0 anda1a2a3 > a2
3 + a21a4.
Problem. 7.2. Consider the model of one predator x and two prey species yand z:
dx
dt= β1xy + β2xz − λx
dy
dt= r1y − γ1xy
dz
dt= r2z(1− z)− γ2xz.
Check that the only steady point (x, y, z) with x > 0, y > 0, z > 0 is given by
x =r1
γ1, z = 1− γ2
r2x, β1y = λ− β2z
provided γ2x < r2 and β2z < λ. Use the Routh-Hurwitz theorem to prove that(x, y, z) is stable.
Problem. 7.3. Find the equilibrium points (x, y, z) of the system (7.1) anddetermine their stability in case (i) x = 0, y > 0, z > 0; (ii) x > 0, y > 0, z > 0 andb1 = b2 = 0.
Problem. 7.4. Consider a model of one prey (x) and two predators (yi):
dx
dt= ax(1− x
A)−
2∑j=1
bxyj
dyidt
= −ciyi + dixyi, i = 1, 2.

NUMERICAL SIMULATIONS 36
where c1d1< c2
d2< A. There are four equilibrium points:
(0, 0, 0), (A, 0, 0), (c1d1,a
b(1− c1
Ad1), 0), (
c2d2, 0,
a
b(1− c2
Ad2)).
Determine which of these points are stable.
Numerical Simulations
In previous chapters, we discussed how to solve an ordinary diffrentail equationsdx
dt= f(x)
by using Euler’s method or using subroutine ode45 in MATLAB. We also introducedhow to plot phase diagram near steady states. Here, we will introduce how to solvefor the stationary solution of the ODE, i.e., the solution of the steady state equation
f(x) = 0.
If f(x) is linear or is of a simple function form, it may be solved analytically;however, if it is nonlinear or if the system is large, solving by hand is not feasible,and thus one needs to use root-finding algorithms. Two of the best known rootfinding algorithms are the bisection method and Newton’s method, name after theeminent 18th century mathematician and scientist Issac Newton. The bisectionmethod is a “gradient free” approach and usually takes longer to converge but it ismore robust. Newton method uses gradient (slope in one dimension) informationand is more efficient.; however, it may fail when the initial estimate is too far awayfrom the root. To explain the basic ideas, we will use scalar equation f(x) = 0, butthe generalization to f(x) = 0 is straightforward.
Bisection Method. The idea of the bisection method comes from the inter-mediate value theorem: continuous function f must have at least one root in theinterval (a, b) if f(a) and f(b) have opposite signs. The method repeatly bisects aninterval then selects, for further processing, a subinterval in which a root must lie.Suppose that we have two initial points a0 = a and b0 = b such that f(a)f(b) < 0.The method divides the interval into two by computing the midpoint c = a+b
2 ofthe interval. If c is a root, then the algorithm terminates. Otherwise, the algorithmchecks whether f(a)f(c) or f(c)f(b) is negative. If f(a)f(c) < 0, the root mustlie in the interval (a, c) and the method sets a as a1 and c as b1. Repeating thisprocess, we can construct a sequence of intervals [an, bn] such that
|bn − an| =|b0 − a0|
2n.
Since the root must lie in these subintervals, the best estimate for the location ofthe root is the midpoint of the smallest subinterval found. In that case, the absoluteerror after n steps is at most
(7.10)|b− a|2n+1
.
If either endpoint of the interval is used, then the maximum absolute error is
(7.11)|b− a|
2n.
If we use (7.11) to determine the number of step such that the error is smaller thanthe given tolerance ε, the number of iterations needs to satisfy

NUMERICAL SIMULATIONS 37
n > log2
|b− a|ε
.
Newton’s Method. Instead of using only the value of the function f , New-ton’s method uses also the derivative of the function. Given the initial guess x0,Newton’s method generates a sequence of approximations of the root by
(7.12) xn+1 = xn −f(xn)
f ′(xn).
until a sufficiently accurate value is reached. This idea originates from the linearapproximation near the root,
f(xn+1) ≈ f(xn) + (xn+1 − xn)f ′(xn) ≈ 0.
If the function f is continuously differentiable and its derivative does not vanish atthe root α and if f has a second derivative in some interval containing α, then theconvergence is quadratic. To prove this, we use the Taylor expansion near α,
0 = f(α) = f(xn) + f ′(xn)(α− xn) +R1
whereR1 =
1
2f ′′(ξn)(α− xn)2
and ξn is in between xn and α. Thus
(7.13) α = xn −f(xn)
f ′(xn)− f ′′(ξn)
2f ′(xn)(α− xn)2.
Setting en = α− xn, and subtracting (7.12) from (7.13), we have
en+1 = − f ′′(ξn)
2f ′(xn)e2n.
Taking absolute value of both sides gives
|en+1| =f ′′(ξn)
2|f ′(xn)|e2n.
SetM = sup
x∈I
1
2
∣∣∣∣f ′′(ξn)
f ′(xn)
∣∣∣∣ , I = [α− r, α+ r] for somer > 0.
The necessary condition of convergence for the initial point x0 is M |e| < 1. Thusthe rate of convergence is quadratic if f ′(x) 6= 0 for x ∈ I, f ′′(x) is bounded forx ∈ I, and x0 sufficiently close to the root α, so that |x0−α| < r. This requirementdoes not explicitly tell us how to choose x0 since we do not know the root α beforethe computation.
Newton’s method can be easily extended to solve the general nonlinear systems.Instead of dividing in (7.12) by f ′(xn), one has to left multiply by the inverse ofn× n Jacobian matrix Jf (xn), i.e.,
(7.14) Xn+1 = Xn − [f ′(Xn)]−1
f(Xn).
For numerical purposes it is more common to rewrite (7.14) in the form
f ′(Xn) (Xn+1 −Xn) = f(Xn).
One can first solve the linear system
f ′(Xn)(X)
= f(Xn)

NUMERICAL SIMULATIONS 38
for X and then the approximation at next step is obtained by
Xn+1 = X +Xn.
Problem. 7.5. Implement Newton’s method to solve x5 = 213. Use initialguess 2. What is the root you find? How many iterations do you need to reach thetolerance 10−12. Plot the convergence history.

CHAPTER 8
Spread of Disease
Epidemiology is the study of patterns, causes, and effects of health and diseaseconditions in a population. It provides critical support for public health by iden-tifying risk factors for disease and targets for preventive medicine. Epidemiologyhas helped develop methodology used in clinical research and public health studies.Major areas of epidemiological study include disease etiology, disease break, diseasesurveillance, and comparison of treatment effects such as in clinical trials.
Epidemiologists used gather data and a broad range of biomedical and psy-chosocial theories to generate theory, test hypotheses, and make educated, informedassertions as to which relationships are causal and in which way. For example, manyepidemiological studies are aimed at revealing unbiased relationships between expo-sure to smoking, biological agents, stress, or chemicals to mortality and morbidity.In the identification of causal relationship between these exposures and outcomeepidemiologists use statistical and mathematical tools.
In this chapter we focus on epidemiology of infectious diseases. The adjectivesepidemic and endemic are used to distinguish between a disease spread by aninfective agent (epidemic) and a disease which resides in a population (endemic).For example, there are occasional spreads of the cholera epidemic in some coun-tries, while malaria in endemic is southern Africa. In order to understand whichepidemic will die out and which will become endemic, we need to determine severalparameters associated with the disease:
C = the number of contacts the infectious person makes per unit time;P = the probability of transmission per contact with the infectious person;D = the duration that the infected person is infectious to others.
The number of expected secondary infections resulting from a single infection caseis, roughly,
R0 = C · P ·D.We conclude that if R0 < 1 then the infection will die out, whereas if R0 > 1 thenthe disease will spread in the population, probably becoming endemic.
Data collected from many sources provide estimate for R0. For example, forMeasles R0 is in the range of 12− 18, and for Mumps R0 is in the range of 4− 7.
The quantities C,P,D may be calculated from statistical data, but they do notgive us insight into the actual evolution, or spread, of the disease. In order to gaininsight into the spread of a disease caused by an infective agent, we need to build amechanistic model. Such a mathematical model, described by differential equations,can project how an infectious disease will progress, and what will be the outcomewith or without intervention. Mathematical models make some assumptions anduse parameters such as C,P,D above, in order to calculate the effect of possibleinterventions, like mass vaccination programs.
39

8. SPREAD OF DISEASE 40
In what follows we shall develop several generic mechanistic models for infec-tious diseases. We note that R0 as defined above is rarely observed in the field. Soinstead we shall calculate R0 from the mathematical model; this is then a differentnumber from the one defined above, and the better the model’s simulations fit withdata the more useful R0 will be.
We begin with a simple model of a disease in a population of size N . We dividethe population into three classes: susceptible S, infected I, and recovered R. Let
β = infection rate,µ = death rate, the same for all individuals,ν = recovery rate,γ = rate by which recovered individuals have lost
their immunity and became susceptible to the disease.
Then we have the following diagram:
where A is the growth of susceptible. If all newborns are healthy, then, not only Sand R, but also I contribute to the growth term A. We view each of the populationsS, I, R, N as representing a number of individuals (or a number density, that is,the number of individuals per unit area). The dimension of γ, µ, ν is 1/time, thedimension of β is 1/(individual · time), and the dimension of A is individual/time.Based on the above diagram, we set up the following system of differential equations:
dS
dt= A− βSI + γR− µS
dI
dt= βSI − νI − µI(8.1)
dR
dt= νI − γR− µR
To examine more carefully the meaning of A, we introduce a differential equa-tion for N(t), which is abtained by adding all the equations in (8.1),
dN
dt= A− µN.
Given initial population density N0, we find that
N(t) = N0e−µt +
A
µ(1− e−µt).
Hence N(t)→ A/µ as t→∞. Thus A/µ is equal to the asymptotic density of thepopulation (as t→∞).

8. SPREAD OF DISEASE 41
The system (8.1) is called the SIR model. The SIR model has an equilibriumpoint which is disease free, namely
(S0, I0, R0) = (A
µ, 0, 0);
we call it the disease free equilibrium (DFE). The Jacobian matrix at the DFEis −µ −βAµ γ
0 βAµ − (ν + µ) 0
0 ν −µ− γ
.
The characteristic polynomial is
(µ+ λ)(βA
µ− (ν + µ)− λ)(µ+ γ + λ).
and the eigenvalues are λ1 = −µ, λ2 = −µ− γ, λ3 = βAµ − (ν + µ). Hence the DFEis stable if
(8.2) βA
µ< ν + µ.
When (8.2) holds, any new small infection will die out with time. On the otherhand if
(8.3) βA
µ> ν + µ,
the DFE is unstable; there are arbitrarily small infections that will not disappearin the population. Furthermore, there is an equilibrium point (S, I, R) with I > 0,namely
(8.4) βS = ν + µ, R =ν
γ + µI,
β
µI =
(βAµ − (ν + µ))
ν + µ− γνγ+µ
.
Problem. 8.1. Prove that if (8.3) holds then the equilibrium point (S, I, R)is stable. [Hint: You need to use the Routh-Hurwitz theorem.]
An important concept in epidemiology is the basic reproduction number:In a healthy population introduce one infection and compute the expected
infection among the susceptibles caused by this single infection We call it the ex-pected secondary infection, or basic reproduction number, and denote it byR0.Then intuitively it is clear that DFE is stable if R0 < 1 (the secondary infectionwill be smaller than the initial infection) whereas if R0 > 1 then the DFE will beunstable.
Consider, for example, the SIR model (8.1). The DFE is (A/µ, 0, 0). Oneinfection evolves according to
dI
dt= −νI − µI, I(0) = 1,
so that I(t) = e−(ν+µ)t at time t, with total life-time infectionˆ ∞0
I(t)dt =1
ν + µ.
The secondary infection is then
R0 = βA
µ· 1
ν + µ.

HIV 42
As already computed in (8.2), (8.3), the DFE is stable if R0 < 1 and unstable ifR0 > 1.
A stable equilibrium point with I > 0 is call endemic; it represents a diseasethat will never disappear.
When a susceptible is exposed to an infected individual, he/she may or maynot become immediately sick. With this in mind, we may extend the SIR modelby introducing a new class E, of exposed individuals. The new model, called theSEIR model, consists of the following equations:
dS
dt= A− βSI + γR− µS,
dE
dt= βSI − κE − µE,(8.5)
dI
dt= κE − νI − µI,
dR
dt= νI − γR− µR.
Here κ is the rate by which the exposed become infected, and β is the rate ofinfection of susceptibles by infected individuals. The DFE for the SEIR model is(Aµ , 0, 0, 0).
Problem. 8.2. Show that the DFE of (8.5) is stable if
βA
µ<
(ν + µ)(κ+ µ)
κ.
Problem. 8.3. Prove that if the DFE is not stable, then there exists anotherequilibrium point.
In the SIR model we have taken the infection term to be βSI. Another possi-bility is to take the infection term to be βSI
N , where IN is the relative proportion of
the infected individuals, namely, the frequency or prevalence of the infection.
Problem. 8.4. Show that when βSI is replaced by βSIN in (8.1), the DFE
(Aµ , 0, 0) is stable if β < ν + µ.
Problem. 8.5. If in the previous problem (8.2) is replaced by β > ν +µ, thenthe DFE is not stable, and there exists another equilibrium point.
HIV
In humans infected with HIV, the HIV virus enters the CD4+ T cells andhijack the machinery of the cells in order to multiply within these cells. As aninfected T cell dies, an increased number of virus emerge to invade and infect newCD4+ T cells. This process eventually lead to significant depletion of the CD4+
T cells, from over 700 in cm3 of blood to 200 in cm3. This state of the disease ischaracterized as AIDS; the immune system is too weak to sustain life for too long.In order to determine whether an initial infection with HIV will develop into AIDSwe introduce a simple model which includes the CD4+ T cells, denoted by T , the

NUMERICAL SIMULATIONS 43
infected CD4+ T cells, denoted by T ∗, and the HIV virus, denoted by V . Theirnumber densities satisfy the following system of equations:
(8.6)
dTdt = A− βTV − µT,
dT∗
dt = βTV − µ∗T ∗,dVdt = γT ∗ − λV.
Here β is the infection rate of healthy T cells by external virus, µ and µ∗are thedeath rates of T and T ∗, respectively, and γT ∗ is the number of virus particle thatemerge upon death of infected CD4+ T cells.
In this model the DFE is (Aµ , 0, 0), and we can compute the basic reproductionnumber R0 as follows:
One virion has the life time of 1λ (since dV
dt = −λV , V (t) = e−λt,´∞
0V (t)dt =
1λ ) and it infects A/µ T cells at rate β, which each infected T ∗ with life time 1/µ∗
gives rise to γ virus particles. Hence
R0 =1
λβA
µ
1
µ∗γ =
βAγ
λµµ∗.
Problem. 8.6. Prove that R0 < 1 if and only if all the eigenvalues of theJacobian matrix of (8.6) about (A/µ, 0, 0) have negative real part.
Numerical Simulations
Finding the roots using MATLAB. There are several built-in functions inmatlab that can be used to solve f(x) = 0:
>> x = fzero(fun,x0)which attempts to find a zero of fun near x0, if x0 is a scalar and fun is a functionhandle. For example,>> x = fzero(@cos,[1 2])x = 1.5708
Another matlab function is>> x = fsolve(fun,x0)
starts at x0 and tries to solve the equations described in fun. For example, solve
2x1 − x2 = e−x1 ,−x1 + 2x2 = e−x2 ,
with the initial guess [x1, x2] = [−5,−5]. First, write a file that computes F, thevalues of the equations at x.
function F = myfun(x)F = [2*x(1) - x(2) - exp(-x(1)); -x(1) + 2*x(2) - exp(-x(2))];
Save this function file as myfun.m somewhere on your MATLAB path. Next, setup the initial point and options and call fsolve:
x0 = [-5; -5]; % Make a starting guess at the solutionoptions=optimset(’Display’,’iter’); % Option to display output[x,fval] = fsolve(@myfun,x0,options) % Call solver
After several iterations, fsolve finds an answer as shown in Table (1).
fsolve completed because the vector of function values is near zero as measuredby the default value of the function tolerance, and the problem appears regular asmeasured by the gradient.
x =

NUMERICAL SIMULATIONS 44
Table 1. output for fsolve
Figure 8.1. (a) contour plot (b) vector field plot
0.56710.5671fval =1.0e-006 *-0.4059-0.4059.
Another two MATLAB functions which are useful to study the phase protraits are“contour” and “quiver”. For example, the contour plot of the function
z = xe(−x2−y2)
over the range −2 ≤ x ≤ 2,−2 ≤ y ≤ 3 can be done by[X,Y] = meshgrid(-2:.2:2,-2:.2:3);Z = X.*exp(-X.^2-Y.^2);[C,h] = contour(X,Y,Z,[-1:0.1:1]); clabel(C,h)
Now we can add the vector field plot by using quiver[DX,DY] = gradient(Z,.2,.2);hold on; quiver(X,Y,DX,DY)
From the vector field, we can easier tell the stability properties of a steady state.
Problem. 8.6. Use “fsolve” to solvex3
1 + x2 = 1,x3
2 − x1 = −1.

NUMERICAL SIMULATIONS 45
Indicate your initial condition and how many steps it requires to reach the toleranceof error to be within 10−6.
Problem. 8.7 Plot the nullclines and directional field of
z = e(−2x2−y2) sinx
in the range of −2 ≤ x ≤ 2,−2 ≤ y ≤ 3.

CHAPTER 9
Transmission of Signals by Neurons
A neuron is a cell that enables transmission of signals. It receives signals astiny electric pulses from many dentrites branches. The electric pulses arrive at onelocation near the cell body, called soma, which houses the nucleus of the neuron.If the combined signal exceeds a certain threshold, then it triggers the initiationof a wave of electrical oscillation that travels along the membrane (also called theplasma membrane) of a relatively long axon, as shown schematically in Fig. 9.1.The electrical wave arrives at the terminal edge of the axon, where it transmitsthe signal to dendritic branches of other neurons, to muscle cells, or to glands. Insummary, the task of a neuron is to receive, conduct, and transmit signals; neuronsreceive signals from the sense organs inward, and after the signals are processedin the brain, or in the spinal cord, a response by other neurons is sent onward foraction by muscle cells and glands.
In this chapter we focus on the travelling electric signal along the axon; it iscalled the action potential. If the plasma membrane were an ordinary conductor,then the electric pulse of the action potential would weaken substantially upon thearrival at the terminal end, and animal activities would slow down to near paralysis.That this is not the case is due to the special voltage-gated channels distributedalong the plasma membrane, and to unequal concentrations of ions species insideand outside the neurons, as we shall proceed to explain.
Within every cell, as well on the outside, there are sodium ions Na+ andpotassium ions K+. The concentration of sodium is larger outside than inside thecell, and the concentration of potassium is larger inside than outside the cell. Hencewhen a sodium channel on the plasma membrane of the axon opens, sodium flowsinto the cell thereby increasing the electric potential (i.e., the positive charge) insidethe axon. Similarly, when a potassium channel opens, potassium ions flow outsidethe axon, thereby decreasing the electric potential, inside the axon.
The difference between the electric potential inside and outside the plasmamembrane is usually called the voltage of the axon. When a neuron is at rest, theelectric potential inside the plasma membrane is smaller compared to the electricpotential outside the membrane. The difference between these potentials is called
Figure 9.1. A neuron. The arrows indicate direction of signal conduction.
46

9. TRANSMISSION OF SIGNALS BY NEURONS 47
Figure 9.2. Profile of dv/dt as a function of v.
the resting potential: it is negative. The sodium and potassium gates mentionedabove open or close in response to the level of the voltage; this accounts for theirname, voltage-gated channels.
When positive charge enters the neuron through the dentritic branches, if thecombined charge exceeds a threshold level, then the neuron fires: the sodium chan-nels begin to open, sodium ions flow into the axon, and the electric potential isfurther increased. This positive feedback continues to increase the voltage until thevoltage reaches a high enough level at which time the open sodium channels beginto slowly shut down, and the voltage begins to drop. A similar role is played bythe potassium; but potassion channels open a little bit after the sodium channels.
Hodgkin and Huxley measured the action potential along axons, and in theearly 1950’s developed a mathematical model whose predictions fit exceedingly wellwith their measurements. They were awarded the Nobel prize for this work.
Subsequently Fitzhugh andNagumo introduced a simpler mathematical modelwith only one type of channels. Their model is capable of producing qualitatively,the travelling wave behavior of the action potential. Here we shall describe theFitzhugh-Nagumo model with voltage-gated sodium channels.
By scaling the voltage v we setv = 0, the resting potential,v = a, the threshold above which the neuron fires,v = 1, the voltage level at which the sodium channels have completely closed.We are going to develop a differential equation for v = v(t). To do that we need
to describe dv/dt as a function of v. Since v = 0 is a stable point (small signals donot make the neuron fire), dv(0)/dt < 0. When the sodium channels begin to openthe voltage increases, so dv/dt > 0 and v continues to increase as the neuron firesat v = a, hence dv(a)/dt > 0. Eventually the voltage v decreases until the sodiumchannels close at x = 1, so that dv(1)/dt < 0. The simplest expression for dv/dt asa function f(v) of v is illustrated in Fig. 9.2.
A formula that is consistent with the profile of Fig. 9.2 is given by
(9.1)dv
dt= −v(v − a)(v − 1) ≡ f(v).
What is missing in (9.1), however, is the part of the process which accounts forclosing of the sodium channels. We introduce a channel blocking mechanism by a

NUMERICAL SIMULATIONS 48
0 0.2 0.4 0.6 0.8 1 1.2 1.4−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
v
wP
I = 0.1
I = 0
Figure 9.3. The two nullclines intersect at (0, 0) when I = 0 andat P when I = 0.1.
variable w, which acts to diminish v, and we replace (9.1) by
(9.2)dv
dt= −v(v − a)(v − 1)− w ≡ f(v)− w.
We assume that dw/dt increases linearly in v and that w degrades linearly:
(9.3)dw
dt= ε(v − γw).
Here γ and ε are positive constants, but ε is very small since the channels open andclose very slowly.
So far we have not incorporated into the model the applied current I comingfrom the cell body. We incorporate it by adding I to the right-hand-side of (9.2):
(9.4)dv
dt= −v(v − a)(v − 1)− w + I ≡ f(v)− w + I.
Consider a situation where the v−nullcline and w−nullcline of (9.4) and (9.3)intersect only at (0, 0) when I = 0, but as I is increased they intersect at a pointwhere f ′(v) > 0, as shown in Fig. 9.3. This situation occurs, for example, ifa = 0.3, γ = 0.3, I = 0.1.
In the next chapter we shall show how, in this situation, if ε is sufficientlysmall, the action potential, under such applied current I, will oscillate in a periodicfashion.
Numerical Simulations
In Fig. 9.4, we plot the function f(v) in Eq. (9.1), and the solutions of thatODE with different initial conditions. The codes are provided in Algorithm 3 and4.
Algorithms 5 and 6 solve Fitzhugh-Nagumo model with three different initialconditions (0.4, 0), (0.5, 0) and (0.6, 0). In the left panel of Fig. 9.5, we drawthese three solutions of Fitzhugh-Nagumo model in v − w plane. Notice that thenullclines interest at one equalibrium point (0, 0). We see that three trajectories

NUMERICAL SIMULATIONS 49
−0.2 0 0.2 0.4 0.6 0.8 1 1.2−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
v
dv / d
t
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
t
v
Figure 9.4. Left: the figure of dvdt = −v(v−1)(v−a) versus v witha = 0.6. Right: the solutions of Eq. (9.1) with initial conditionsfrom 0.1 to 1.1 with increment 0.1.
Algorithm 3 model_potential.mglobal a a = 0.6;%% plot the profile of the dv/dtv = -0.2:0.01:1.1;t = 0;dvdt = potential_eqn(t,v);figure(1); plot(v,dvdt)xlabel(’v’), ylabel(’dv / dt’)options = odeset(’RelTol’,1e-4,’AbsTol’,[1e-4]);% simulate Eq. 9.1t0 = 0; tfinal = 10;v_ini = 0.1:0.1:1.1;nn = length(v_ini);for ind = 1:nny_ini = v_ini(ind);[T,y] = ode45(@potential_eqn,[t0 tfinal],y_ini,options);figure(2); hold on; plot(T,y);xlabel(’t’); ylabel(’v’)end
Algorithm 4 potential_eqn.mfunction dv = potential_eqn(t,v)
global adv = -v.*(v-a).*(v-1);
converge to the equalibrium point. In the right panle of Fig. 9.5, the solutions of(v(t), w(t)) are drawed versus time t.

NUMERICAL SIMULATIONS 50
0 0.2 0.4 0.6 0.8 1
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
v
w
0 10 20 30 40 50 60 70 80 90 100−0.2
0
0.2
0.4
0.6
0.8
1
1.2
time
[v,w
]
v
w
Figure 9.5. Fitzhugh-Nagumo model. Left: the solutions ofFitzhugh-Nagumo model with three different initial conditions (0.4,0), (0.5, 0) and (0.6, 0) in v − w plane. Right: the solutions of(v(t), w(t)) with these three initial conditions versus time t.
Algorithm 5 model_Fitzhugh-Nagumo% This is the main function to solve% the Fitzhugh-Nagumo modelglobal a epsi gammaa = 0.3; epsi = 0.01; gamma = 2.5;options = odeset(’RelTol’,1e-4,’AbsTol’,[1e-4 1e-4]);t0 = 0; tfinal = 100;v_ini = [0.4 0.5 0.6];w_ini = [0.0 0.0 0.0];for ind = 1:3y_ini = [v_ini(ind) w_ini(ind)];[T,y] = ode45(@FitzhughNagumo_eqn,[t0 tfinal],y_ini,options);% plot N2 versus N1 figure(1);hold on; plot(y(:,1),y(:,2));xlabel(’v’), ylabel(’w’)axis equal; box onfigure(2); hold on; plot(T,y(:,1),T,y(:,2))legend(’v’,’w’), xlabel(’time’), ylabel(’[v,w]’)end% plot the nullclinev = -0.1:0.01:1.05;w1 = -v.*(v-a).*(v-1);figure(1);hold on;plot(v,w1,’k’)w2 = v/gamma;figure(1); hold on;plot(v,w2,’k’)

NUMERICAL SIMULATIONS 51
Algorithm 6 Fitzhugh-Nagumo_eqn.mfunction dy = FitzhughNagumo_eqn(t,y)global a epsi gammady = zeros(2,1);dy(1) = -y(1)*(y(1)-a)*(y(1)-1)-y(2);dy(2) = epsi*(y(1)-gamma*y(2));

CHAPTER 10
Neuronal Oscillations
Biological processes often involve several time scales. One example is the actionpotential modeled by (9.3), (9.4), where the blocking signal w responds very slowlyto the voltage increase. Consider, more generally, the following system with twotime scales,
dx
dt= f(x, y),(10.1)
dy
dt= εg(x, y),(10.2)
where ε is a small positive parameter; the variable y changes at a smaller scale thanthe variable x. We shall explore conditions under which such a system supportsperiodic oscillations as those observed experimentally when neurons fire.
We assume that the x-nullcline is a cubic and the y-nullcline is a monotonefunction. We also assume that the two nullclines intersect at a single point Q onthe monotone increasing branch of the x-nullcline, as illustrated in Fig. 10.1. Weshall explain, without a rigorous mathematical proof, how the system (10.1)-(10.2)gives rise to a periodic solution with a trajectory that lies in the vicinity of thecurve ABCDA.
We first observe that if ε = 0 then dy/dt = 0 so that y(t) = constant. Takingε = 0 as an approximation is justified in case f(x, y) stays away from zero in Eq.(10.1), for then dy/dt is relatively negligible compared to dx/dt. Thus, a trajectory(x(t), y(t)) starting at (x0, y0) where f(x0, y0) 6= 0 will approximately satisfy y(t) =y0 as long as (f(x(t), y0) remains away from zero. In particular, a trajectory startingnear and below B will travel horizontally, with speed dx/dt = f > 0, until it reachesthe x-nullcline near C. Similarly, a trajectory starting near and above D will travel
Figure 10.1. The x- and y-nullclines of the system (10.1)-(10.2)
52

NUMERICAL SIMULATIONS 53
approximately horizontally, with dx/dt = f < 0, until it reaches the x-nullclinenear A.
To see how a trajectory evolves once it is located on the x-nullcline, one in-troduces the slow time scale τ , defined as τ = εt. Then, Eqs. (10.1), (10.2)become
(10.3) εdx
dτ= f(x, y),
dy
dτ= g(x, y).
Since g < 0 above the y-nullcline, g is negative along the arc AB and thus itpulls y further downward toward B as well as at B. Since B is the point at whichthe x-nullcline turns upward, the trajectory departs from the x-nullcline, and then,as explained above, it proceeds along a curve close to the horizontal line BC. Ina similar way, using the slow time scale, one can see that trajectory will moveapproximately along the x-nullcline form C to D (since dy/dτ = g > 0 on CD)and then, approximately back to A along y = constant. The motion along thex-nullcline takes place in the slow time scale (slow motion), whereas the horizontalmotion takes place on the original (fast) time scale as indicated by the doublearrows in Fig. 10.1.
In the above discussion we have tacitly assumed that a trajectory (x(t), y(t))starting at A will remain on the arc AB of the x-nullcline, or at least very closeto it, as y(t) changes. This is indeed the case because ∂f(x, y)/∂x < 0 along thearc AB and hence (x, y) is a stable equilibrium point for the differential equationdx/dτ = 1
ε f(x, y), with y fixed.We now apply the above considerations to the system (9.3), (9.4). For any
0 < a < 1, if γ is sufficiently small then the w-nullcline intersects the v-nullclineon the arc where f ′(v) > 0, provided the applied current is large enough; see Fig.11.3. Hence, if the applied current is above a certain threshold, then the actionpotential can develope periodic oscillations provided ε is sufficiently small.
Problem. 10.1. Consider the Fitzhugh-Nagumo systemdvdt = f(v)− w + I,dwdt = ε(v − γw)
where f(v) = −v(v − a)(v − 1), 0 < a < 1, and I is such that the two nullclinesintersect at a point Q where f ′(v) > 0 (as in Fig. 10.1). Show that Q is unstable ifε is sufficiently small.
Biologically this result means that neuronal oscillations cannot converge to asteady state.
Numerical Simulations
Problem. 10.2. Let a = 0.3, γ = 0.3, I = 0.1 be such that the nullclines of(9.3), (9.4) intersect at a single point P = (v∗, w∗) lying on the monotone increasingarc of the v-nullcline. Compute the solution of (9.3), (9.4) initiating at (v0, w0) nearP (but (v0, w0) 6= P ) when ε = 1, ε = 1
10 , ε = 1100 .
Problem. 10.3. Do the same computations as in Problem 10.1 when the initialpoint (v0, w0) lies on the v-nullcline; w0 = f(v0) + I,with v0 = 0.2.

CHAPTER 11
Bifurcation Theory
Bifurcation theory is concerned with the question of how the behavior of a sys-tem which depends on a parameter p changes with the parameter. It focuses on anycritical value, p = pcr, where the behavior of the system undergoes radical change;such values are called bifurcation points. Consider for example the case of a cellwhich grows and replicates. During the cell cycle, there occur several critical timeswhen the cell moves from one phase to another. The first such time occurs at thecheck point R1 when the cell commits to begin replicating its DNA. The biologicalprocess about R1 can be described by a network of signaling proteins whose dy-namics is triggered by a cyclin dependent kinase, Cdk. When the concentration pof this kinase exceeds some critical level pcr, the protein network allows the cell topass the check point R1, and to start replicating its DNA.
Many biological processes exhibit periodic oscillations when stimulated at thresh-old level. This occurs, for example, in neuronal oscillations, in calcium waves thatactivate muscle contraction, and in cardiac rhythms. The level of simulation canbe viewed as a bifurcation parameter. Mathematical theory was developed in orderto explain the phenomenon associated with such periodic oscillations. The systemhas a stable equilibrium if the bifurcation parameter p is smaller (or larger) thana critical value pcr, and as p cross pcr it gives rise to a family of periodic solution;this type of bifurcation is called Hopf bifurcation, and in this chapter we explainwhat conditions give rise to Hopf bifurcation.
Biological switching from stability to instability, or vice versa, are quite commonin biology, and they are sometimes associated with a hysteresis phenomenon. Thisis the case when a system can be in two states: high activation with parameterp < p2 and low activation with parameter p > p1 , where p1 < p2. As p is increasesand crosses the higher bifurcation point p2 the system changes from high activationto low activation. If p is then decreased, the system remains in low activationuntil p crosses the lower critical value p1, at which time the system bounces backto the high activation state. Thus for p1 < p < p2 the system can be in eitherstate, depending on its recent history. Mathematical models of hysteresis may helpunderstand how more complex systems with hysteretic components work.
We consider bifurcation theory for a system of differential equations with pa-rameter p,
(11.1)dx
dt= f(x, p).
Bifurcation point can arise in different ways. For example, suppose a steady stateof Equation (11.1), which depends on p, is stable for p < pc but loses stability at pc.Then a qualitative change has occurred in the phase portrait of the system (11.1),and p = pc is a bifurcation point.
54

11. BIFURCATION THEORY 55
Figure 11.1. (a) Saddle-point bifurcation diagram; (b) transcrit-ical bifurcation diagram.
Surprisingly enough there are just four major types of bifurcations; the firstthree already occur in one-dimensional systems, while the fourth needs at least twodimensions. The first three types of bifurcations and their representative differentialequations are as follows:
dx
dt= p+ x2 (saddle-point bifurcation),(11.2)
dx
dt= px− x2 (transcritical bifurcation),(11.3)
dx
dt= px− x3 (pitchfork bifurcation),(11.4)
In the case of Eq. (11.2), there are two steady states for p < 0, namely, xs± =±√−p; xs− is stable and xs+ is unstable. The solid curve in Fig. 11.1(a) describes
the stable branch of steady states, and the dotted curve describes the branch ofunstable steady states. At p = 0, the stable and unstable branches of steady statescoalesce; this bifurcation at p = 0 is called a saddle-point bifurcation. Fig. 11.1gives examples of bifurcation diagrams. The parameter p is referred to as thebifurcation parameter.
In the case of Eq. (11.3), x = 0 is a steady state for all p; it is stable if p < 0and unstable if p > 0. Another branch of steady states is given by xs = p; a steadystate in this branch is stable for p > 0 and unstable for p < 0. This transcriticalbifurcation diagram is shown in Fig. 11.1(b); the diagram is characterized byan exchange of stability of the branches of steady states at the bifurcation point(p = 0).
In the case of Eq. (11.4), for p < 0 the only steady state is xs = 0; but forp > 0, there are two more steady states, namely xs± = ±√p. The steady statexs = 0 is stable if p < 0 and unstable if p > 0. The steady states xs± = ±√p (forp > 0) are both stable. The diagram of this pitchfork bifurcation is shown inFig. 11.2(a). A similar pitchfork bifurcation for the equation
(11.5)dx
dt= px+ x3

11. BIFURCATION THEORY 56
Figure 11.2. Pitchfork bifurcation. Solid curves represent stablesteady states, while dotted curves are unstable steady states.
is shown in 11.2(b); in this case the two branches xs± = ±√−p are unstable, and
xs = 0 is stable if p < 0 and unstable if p > 0. The bifurcation in Fig. 11.2(a) is saidto be supercritical since the bifurcating branches appear for values of p larger thanthe bifurcation point pc = 0. The bifurcation in Fig. 11.2(b) is called subcriticalsince the two bifurcating branches occur for p smaller than the bifurcation pointpc = 0.
Problem. 11.1. Establish the stability and instability of the bifurcation branchesgiven by Eqs. (11.2)-(11.4) and depicted in Figs. 11.1 and 11.2.
Many biological processes are oscillatory in nature, for example, the beating ofthe heart, spiking fo neurons in the brain, circadian rhythms arising from cycles ofday and night, and the cell-division cycle. The existence and characteristics of theseoscillations depend on the parameters of the system, and it is important to knowwhen or how these oscillations arise. The Hopf bifurcation refers to the bifurcationof periodic solutions as a parameter is varied.
The Hopf bifurcation refers to the bifurcation fo period solutions from asteady state solution as a parameter is varied.
Consider the system
(11.6)dx
dt= f(x, y, p),
dy
dt= g(x, y, p).
Assume that for all p in some interval there exists a steady state (xs(p), ys(p)), andthat the two eigenvalues of the Jacobian matrix (evaluated at the steady state) arecomplex numbers λ1(p) = α(p) + iβ(p) and λ2(p) = α(p)− iβ(p). Assume also that
α(p0) = 0, β(p0) 6= 0 anddα
dp(p0) 6= 0.
Theorem. 11.1. Under the above conditions one of the following three casesmust occur:
(1) there is an interval p0 < p < c1 such that for any p in this interval thereexists a unique periodic orbit containing (xs(p0), ys(p0)) in its interior andhaving a diameter proportional to |p− p0|1/2;

11. BIFURCATION THEORY 57
Figure 11.3. Supercritical Hopf bifurcation at p = 0.
(2) there is an interval c2 < p < p0 such that for any p in this interval thereexists a unique periodic orbit as in case (1);
(3) for p = p0 there exist infinitely many orbits surrounding (xs(p0), ys(p0))with diameters decreasing to zero.
Case (1) is called a supercritical Hopf bifurcation and case (2) is called a sub-critical Hopf bifurcation; these cases are generic. Case (3) is rather infrequent.Fig. 11.3 illustrates a supercritical Hopf bifurcation.
We illustrate the statement of Theorem 11.1. in a special case where all thesteady points (xs(p), ys(p)) coincide with the origin. The system we consider isgiven by
(11.7)dx1
dt = px1 − µx2 − ax1(x21 + x2
2),dx2
dt = µx1 + px2 − ax2(x21 + x2
2),
where µ, a are positive constants. The point x = 0 is a steady state for all p.The eigenvalues λ(p) = α(p) ± iβ(p) of the Jacobian matrix at x = 0 are givenby λ = p ± iµ, so that α(p) = p, β(p) = µ and α(0) = 0, β(0) = µ > 0, anddα(0)/dp = 1 > 0. Thus the Hopf bifurcation occurs at p = 0. The steady pointx = 0 is stable if p < 0 and unstable if p > 0. For any p > 0 there exists a periodicsolution
x1(t) =
√p
acosµt, x2(t) =
√p
asinµt,
with period 2π/µ. The trajectory is a circle of radius√p/a, i.e., it is propotional
to p1/2, as asserted in Theorem 11.1. The Hopf bifurcation is supercritical, sincethe periodic solutions occor for p > 0.
So far we have assumed that a > 0. The case a < 0 can be analyzed in a similarway. Consider next the case a = 0. Then the eigenvalues of the linear system atp = 0 are ±iµ. This is the case of a center shown in Fig. 11.1(F); for p = 0, thereare infinitely many periodic solutions, as asserted in case (3) of Theorem 11.1.

11. BIFURCATION THEORY 58
Problem. 11.2. Consider a solution of (11.7) with initial condition such thatx2
1(0) + x22(0) > p
a . Set R(t) = x21(t) + x2
2(t) and show that
dR
dt= pR− aR2.
Deduce that R(t) > pa for all t > 0,
1
2pln
ρ
|ρ− p/a|= t+ constant.
and R(t)→ pa as t→∞.
The last conclusion of Problem 11.2 shows that the periodic solution with radius√p/a is stable from the outside. The next problem shows that the periodic solution
is not stable from the inside.
Problem. 11.3. If in Problem 11.2 we take
x21(0) + x2
2(0) <p
a,
then x21(t) + x2
2(t)→ 0 as t→∞.
Problem. 11.4. Consider the following predator-prey model:
dx
dt= x2(1− x)− xy
dy
dt= 4xy − 4py
where 0 < p < 1. Show that it has an equilibrium point (p, p(1− p)) and the Hopfbifurcation occurs at p = 1
2 . The above system may be viewed as a predator-preymodle with x being the prey.
The Hopf bifurcation occurs in many biological processes. We give here anotherexample of a predator-prey model, where the prey u has a logistic growth:
(11.8)dudt = u(1− 1
2u)− uv,dvdt = −v(1− pv) + 2uv,
where 0 < p < 1. The term pv accounts for the fact that as v decreases (by death)there will be more resources available for the live predators, resulting in increasedlongevity.
Problem. 11.5. Show that in the model (11.8)
(u, v) = (2− 6
4− p,
3
1− p)
is a steady point which is stable if 0 < p < 14 and unstable if 1
4 < p < 1, and thatHopf bifurcation occurs at p = 1
4 .

NUMERICAL SIMULATIONS 59
p
x
−5 −4 −3 −2 −1 0 1 2 3 4 5−5
−4
−3
−2
−1
0
1
2
3
4
5
p
x
−5 −4 −3 −2 −1 0 1 2 3 4 5−5
−4
−3
−2
−1
0
1
2
3
4
5
p
x
−5 −4 −3 −2 −1 0 1 2 3 4 5−5
−4
−3
−2
−1
0
1
2
3
4
5
Figure 11.4. Bifurcation diagram for saddle point bifurcation.(a) Red curves are the steady states; (b) green circles are non-steady-state points; (c) solutions converge to stable steady states(blue circles).
Numerical Simulations
To plot the bifurcation diagram, one needs to scan through the parameter spaceand solve the ODEs for those parameters. If we would like to plot the bifurcationdiagram for
dx
dt= f(x, p),
the first step is to plot the the nullcline on the x-p plane (f(x, p) = 0), whichcorreponds to the steady states xs under different p. On the nullcline, part of thecurve corresponds to stable steady state, and part of that corresponds to unstablesteady state (of course, it is possible that only one of them exist). Let us considerthe example
dx
dt= x2 + p.
First we would like to plot the curve of x2 + p = 0 on x-p plane. In MATLAB,define the right-hand-side function in a script file:
function y = saddlefun(p,x)y = p + x.^2;Note that p and x could be matrices (so is y) in order to accomodate the
discretized mesh grid matrix of x-p space. To plot the bifurcation diagram, wecreate bifur.m, a function file (see Algorithm 1)., with inputs the name of thefunction (e.g. ’saddlefun’) and the range of x and p to plot. In bifru.m, we firstdiscretize x-p plane in 101 by 101 mesh grid (use the command ’meshgird’). Thenwe try to fplot the zeros of x2 + p by using the ’contour command, as shown inFig. Next, for each p, we need to start with an initial condition x0 which is NOT asteady state and see at what steady state it ends up. To achieve that, we avoid thenullclines (by using |f(xi, pj)| > 0.1×mean|f(xi, pj)|), use the rest of the points asintial conditions and solve the ODE. The solution will get away from the unstablesteady state (branch) and be attracted to stable steady state (branch) (Fig.).
Problem. 11.4. Plot the bifrcation diagram fordx
dt= px− x3.
with range −5 ≤ p ≤ 5,−5 ≤ x ≤ 5.

NUMERICAL SIMULATIONS 60
Algorithm 7 bifur.m% BIFUR Draws bifurcation diagrams% BIFUR(FCN,XRANGE,PRANGE) draws the% bifurcation diagram % for the function FCN over the specified x and p ranges.% FCN is a handle to a user-defined function that takes as% arguments a variable x and a parameter p. XRANGE is a% row vector of the form [XMIN XMAX]. PRANGE is a row vector % of the form[PMIN PMAX].%% Example:% bifur(@saddlefun,[-5 5],[-5 5]);%% where saddlefun is a user-defined function of the form%% function y=saddlefun(x,p)% y=p+x.^2;%function bifur(fcn,xrange,prange)nn = 100; % number of points plotted in each rangep1 = [prange(1):(prange(2)-prange(1))/nn:prange(2)]; % sample points in px1 = [xrange(1):(xrange(2)-xrange(1))/nn:xrange(2)]; % sample points in x[p,x] = meshgrid(p1,x1); % generate grid points in [p,x]fval = feval(fcn,x,p); % evaluate the points valuefigure(1);[c,h] = contour(p,x,fval,[0,0],’r’); % plot the zero contour linexlabel(’p’), ylabel(’x’) x = x(:); p = p(:);ind = find(abs(fval)>0.05*mean(abs(fval(:))));x = x(ind); p = p(ind);if 1figure(1); hold on; plot(p,x,’go’) % draw the initial pointsendfor iter = 1:1000x = x + 0.05*feval(fcn,x,p); % solve odeend hold on; plot(p(:),x(:),’bo’)

CHAPTER 12
Enzyme Dynamics
Cells are the basic units of life. A cell consists of a concentrated aqueoussolution of molecules contained in a membrane, called plasma membrane. A cellis capable of replicating itself by growing and dividing. Cells that have a nucleusare called eukaryotes, and cells that do not have a nucleus are call prokaryotes.Bacteria are prokaryotes, while yeast and amoebas, as well as most cells in our body,are eukaryotes. The Deoxyribonucleic acid (DNA) are very long polymericmolecules, consisting of two strands of chains, having double helix configuration,with repeated nucleotide units A, C, G, and T. The DNA is packed in chromosomes,within the nucleus in eukaryotes. In humans, the number of chromosomes is 46,except in sperm and egg cells where the number is 23.
The DNA is the genetic code of the cell; it codes for proteins. Proteins liemostly in the cytoplasm of the cells, that is, outside the nucleus; some proteinsare attached to the plasma membrane, while some can be found in the nucleus.Proteins are polymers of amino acids whose number typically ranges from hundredsto thousands; there are 20 different amino acids from which all proteins are made.Each protein assumes 3-dimensional configuration, called conformation. Proteinsperform specific tasks by changing their conformation.
Two proteins, A and B, may combine to form a new protein C. We expressthis process by writing
A+B −→ C.
Biological processes within a cell involves many such reactions. Some of thesereactions are very slow, other are very fast, and in some cases the reaction ratemay start slow, then speed up until it reaches a maximal level. In this chapter weconsider the question: How to determine the speed of biochemical reactions amongproteins. In order to address this question we shall develop some mathematicalmodels.
We begin with a simple case. Suppose we have two proteins, A and B, or moregenerally, two molecules A and B. We assume that A and B, when coming incontact, undergo a reaction, at some rate k1, that make them form a new moleculeC. We express this reaction by writing
A+Bk1−→ C;
k1 is called the rate coefficient. The respective concentrations of three moleculesare denoted by [A], [B], and [C]. The law of mass action states that the reactionrate d[C]
dt , or v1, of the above reaction is given by
v1 = k1[A][B],
61

12. ENZYME DYNAMICS 62
that is,
(12.1)d[C]
dt= k1[A][B]
Note that the above reaction implies thatd[A]
at= −k1[A][B],
d[B]
at= −k1[A][B].
If the reaction is reversible with rate coefficient k−1, then
A+Bk1
k−1
C
andd[C]
dt= k1[A][B]− k−1[C],
d[A]
dt=d[B]
dt= −k1[A][B] + k−1[C].
Metabolism in a cell is the sum of physical and chemical processes by whichmaterial substances are produced, maintained or destroyed, and by which energy ismade available. Enzymes are proteins that act as catalysts in speeding up chemicalreactions within a cell. They play critical roles in many metabolic processes withinthe cell. An enzyme, say E, can take a molecule S and convert it to a molecule P inone millionth of a second. The original molecule S is referred to as the substrate,and P is called the product. The enzyme-catalyzed conversion of a substrate Sinto a product P is written in the form
(12.2) SE−→ P.
The profile [S] −→ [P ] can take different forms, depending on the underlying biology.Two typical profiles are shown in Figure 12.1.
d[P
]/dt
(A) [S]
d[P
]/dt
(B) [S]
Figure 12.1. Two different profiles of the enzymatic conversionof S −→ P .
Figures 12.1(A) and 12.1(B) have been shown to hold in different experiments,but it would be useful to derive them by mathematical analysis based on knownproperties of enzymes. We begin with the derivation of a formula that yields theprofile of Figure 12.1(A).

12. ENZYME DYNAMICS 63
In what follows we show how such a profile can be derived from the law of massaction. We write, schematically,
S + Ek1
k−1
C
where C is the complex SE,C
k2−→ E + P.
By the law of mass actiond[C]
dt= k1[S][E]− (k−1 + k2)[C],(12.3)
d[E]
dt= −k1[S][E] + (k−1 + k2)[C],(12.4)
d[S]
dt= −k1[S][E] + k−1[C],(12.5)
d[P ]
dt= k2[C].(12.6)
Notice thatd
dt([E] + [C]) = 0
so that [E] + [C] = const = e0; e0 is the total concentration of the enzyme in bothE and the complex C. Note that d[C]
dt + d[S]dt + d[P ]
dt = 0, so equation (12.5) dependson equations (12.4) and (12.6) and may therefore be dropped.
We focus on equation (12.3) and note that in the enzymatic process the complexC changes very fast. Hence d[C]/dt is approximately zero, so that
k1[S][E]− (k−1 + k2)[C] = 0.
Substituting [E] = e0 − [C] we get
k1[S](e0 − [C]) = (k−1 + k2)[C]
or[C] =
k1e0[S]
(k−1 + k2) + k1[S]=
e0[S]
kM + [S]
where KM = k−1+k2k1
.Then
(12.7)d[P ]
dt= k2[C] = k2e0c =
Vmax[S]
KM + [S]
where Vmax = k2e0.we have thus derived the Michaelis-Menten formula
(12.8)d[P ]
dt=
Vmax[S]
KM + [S]
where Vmax and KM are constants; note thatd[P ]
dt→ Vmax as [S]→∞.
The assumption we made in the derivation of (12.8) that d[C]/dt is very smallis quite reasonable and, indeed, the Michaelis-Menten formula is widely used indescribing enzymatic processes.

12. ENZYME DYNAMICS 64
But what about Figure 12.1(B)? Such a profile is based on a different enzymaticprocess, for example when an enzyme E can bound first with one substrate S andthen with another substrate S. Furthermore, in such a case, as is well establishedexperimentally, the speed by which the enzyme bounds with the second substrateis much faster. We model such processes as follows:
(12.9)
S + Ek1
k−1
C1, (C1 = SE)
C1k2
→ E + P
S + C1
k3
k−3
C2 (C2 = SC1 = S2E)
C2k4
→ C1 + P
so thatd[P ]
dt= k2[C1] + k4[C2].
Note that [E] + [C1] + [C2] = const. = e0. Assuming the steady state approxi-mations
d[C1]
dt=d[C2]
dt= 0
one can show that
(12.10)d[P ]
dt=
(k2K2 + k4[S])e0[S]
K1K2 +K2[S] + [S]2,
where
K1 =k−1 + k2
k1, K2 =
k−3 + k4
k3.
Steps 1 and 3 in equations (12.9) represent sequential binding of two substratemolecules to the enzyme. We assume that previously enzyme-bound substratemolecule significantly increases the rate of binding of a second substrate molecule,so that k3 >> k1. In the extreme case of k1 → 0, k3 → ∞, with k1k3 a finitepositive constant, we get K1 →∞, K2 → 0, K1K2 → KH > 0, so that
(12.11)d[P ]
dt=
Vmax[S]2
KH + [S]2
where Vmax and KH are constants. Formula (12.11) is called the Hill kinetics; itdisplays a profile similar to Figure 12.1(B).
Some enzymes can bound with three or more substrates. In this case it isoften the case that when enzyme has already bounded with m substrates S, ithas a greater affinity to bound with the next substrate S. Under this biologicalassumption, one can derive the Hill kinetics of order n,
(12.12)d[P ]
dt=
Vmax[S]n
KH + [S]n.

12. ENZYME DYNAMICS 65
Problem. 12.1. Consider the chemical reacitons
Ak−→ B + C, B + C
k−→ A
with [A] + [C] = 3 at time t = 0. Show that y = [B] satisfies y(t) = y0e−3kt.
Problem. 12.2. Derive Equation (12.10) under the steady state approxima-tions d[C1]/dt = 0, d[C2]/dt = 0.

CHAPTER 13
Cancer
An abnormally new growth of tissue that grows more rapidly than normal cellsand has no physiological function is called neoplasm or tumor. Such growthcompetes with normal cells for space and nutrients. When this new growth islocalized, it is called benign tumor, while if it spreads to other parts of the bodyit is calledmalignant tumor or cancer, although sometimes people use the wordstumor and cancer interchangeably.
When tumor in a tissue has reached a size of several millimeters, it may nolonger grow because of limited diffusion of nutrients from the vascular system.Such a tumor is called avascular. Tumor cells will try to induce the formation ofnew blood vessels (angiogenesis) and their movement toward the tumor. Theydo so by secreting tumor endothelial growth factor (VEGF) and, if successful,the tumor becomes vascular. A vascular tumor continues to grow and may invadethe lymphatic or blood vessels. Transported by the flow in these vessels, cancercells may spread into other locations in the body, resulting in metastasis, that is,the formation of new cancer colonies. Most cancer deaths are due to metastasizedcancer.
Cancer is a disease of tissue growth failure, and it is the result of normalcells transforming into cancer cells because of mutations in genes that regulate cellgrowth and differentiation. In the context of cancer, these genes are classified intooncogenes and tumor suppressor genes. Oncogenes are genes which promotecell growth and reproduction. Tumor suppressor genes are genes which inhibit celldivision and survival. Malignant transformation occurs when oncogenes becomeoverexpressed over normal oncogenes, or tumor suppressor genes become underex-pressed, or disabled. Typically many genes are required to transform a normal cellinto a cancer cell.
It is commonly believed that most mutations leading to cancer are due toexternal conditions, such as smoking, dietary factors, environmental pollutants,exposure to radiation, and certain infections. But some mutations are hereditary.
There are more than one hundred known types of human cancer, broadly cat-egorized according to the tissue of origin. Carcinomas begin with epithelial cells;sarcomas arise from connective tissues, muscles and vasculature; leukemias andlymphomas are cancers of the hematopoietic (blood) and immune system, re-spectively; gliomas are cancers of the central nervous system, including the brain;retinoblastomas are those of the eyes.
Cancer is a complex disease involving several scales of space and time. Thespatial scales include the molecular scale within a single cancer cell and the macro-scopic scale of cell populations growing in a tissue. The temporal scales are the celllifecycle and the months or years it takes for cancer to become noticeable. Therehave been many mathematical models that try to capture some aspects of cancer
66

13. CANCER 67
growth. Here we consider a simple model. We begin with a model of a heathytissue.
In a healthy tissue, cells receive nutrients (oxygen, glucose) from the bloodcirculatory system. A simple model that describes the proliferation of cells withdensity x in relation to the supply of nutrients with concentration c is given by theequations:
dx
dt= µ(c− c)x,(13.1)
dc
dt= −γcx+ δ.(13.2)
Here c is a minimal level of nutrient concentration which cells require in order togrow and replicate, µ is the rate of growth (if c > c) or shrinkage (if c < c), γ isthe rate of nutrient consumption by cells, and δ is a source of nutrients from thecirculatory system.
The system (13.1), (13.2) has a unique equilibrium point, c = c, x = δ/γc.
Problem. 13.1. Prove that (c, δ/γc) is a stable equilibrium point.
We next consider a solid tumor of spherical shape whose radius r = R(t) varieswith time t. As R(t) increases, the cells in the core will lose access to nutrients.To overcome this shortage of nutrients, the tumor cells secrete growth factorsthat induce capillary blood vessels to grow toward the tumor (a process calledangiogenesis) and thus provide it with additional nutrients. How slow or fast thetumor will grow depends on how effective the growth factors are. There are curretlya number of drugs for cancer treatment aimed at blocking these growth factors.
A simple model of cancer cells x and growth factors γ was suggested byGumpertz:dx
dt= γx,(13.3)
dγ
dt= −αγ,(13.4)
Problem. 13.2. Prove that the solution of (13.3)-(13.4) satisfies theGumpertzequation
(13.5)dx
dt= −αx ln
x
K, (0 < x < K)
where K is given by
lnx(0)
K= −γ(0)
α.
The constant K is called the carrying capacity and α is the growth rate.The constantK depends on the density of the blood vessels which provides nutrientsto the tumor. We can refine the model (13.5) by taking K to be a function of theconcentration of the blood capillaries, which we shall denote by y. We take K = y,so that
(13.6)dx
dt= −αx ln
x
y,
and model the concentration y by the equation
(13.7)dy
dt= A− 2µy + δxy.

13. CANCER 68
Here A−2µy represents the natural growth and degradation of capillaries, andδxy represents the formation of new capillaries from existing capillaries, inducedby growth factors secreted by the the tumor cells.
Problem. 13.3. The system (13.6)-(13.7) has steady states
x = y = Z± where Z± =1
δ{µ±
√µ2 − δA},
provided δA < µ2. Prove that the steady state x = y = Z− is stable, and that thesteady state x = y = Z+ is unstable if µ− α >
√µ2 − δA.
The biological interpretation is that (i) if δA > µ2, the tumor receives sufficientnutrients so it grows indefinitely (no steady states); (ii) if δA < µ2, there will be asteady state (benign tumor) provided the tumor growth rate, α, is small enough.
We now turn to cancer treatment, and consider virotherapy. The treatmentconsists of injecting viruses into the tumor in order to kill the tumor cells. Theseviruses, called oncolytic viruses, are genetically altered so that they infect cancercells but not healthy cells. After entering a cancer cell, a virus begins to quicklyreplicate, and when the cancer cell dies, a large number of virus particles burst outand proceed to infect other cancer cells.
To model this process we introduce the following variables:x = number density of cancer cells,y = number density of infected cancer cells,n = number density of dead cells,v = number density of virus particles which are not contained in cancer cells.Virotherapy is modeled by the following equations:
(13.8)
dxdt = λx− βxv,dydt = βxv − δy,dndt = δy − µn,dvdt = bδy − γv.
whereλ = proliferation rate of cancer cells,β = rate of infection of cancer cells by viruses,δ = death rate of infected cancer cells,µ = removal rate of debris of dead cells,
and, finally, b is the replication number of a virus at the time of death of the infectedcancer cell. Adding Eqs. (13.8), we get
(13.9)d
dt(x+ y + n) = λx− µn.
We assume that the tumor is spherical with radius R(t) and that the cells arecontinuously moving around in a way that keeps their distribution constant withinthe sphere. Hence
(13.10) x(t) + y(t) + n(t) = θ(t)
where θ(t) is the total cell density. By (13.9), the increase in the number of cells inthe growing sphere is given by
d
dt(4π
3R3(t)θ(t)) = (λx(t)− µn(t))
4π
3R3(t).

NUMERICAL SIMULATIONS 69
We assume that θ(t) is approximately a constant θ0. Then, after using also(13.10) we get
(13.11) θ03
R
dR
dt= (λ+ µ)x+ µy − µθ0
where x and y satisfy the first two equations of (13.8) and v satisfies the lastequation of (13.8).
Viral therapy as described above was not initially successful because it failedto address the effect of the immune system. Immune cells recognize the infectedcancer cells and destroy them before the virus particles get a chance to replicateto their full potential. To make virotherapy more effective the immune systemmust therefore be suppressed. In Problem 9.5 we extend the model (13.6)-(13.11)to include the density of the immune cells, z, and the chemotherapy P whichsuppresses the immune system.
Problem. 13.4. Show that the system for (x, y, v) in (13.8) has a steady point(x, y, v) with x > 0, and determine whether it is stable.
Numerical Simulations
To simulate the model (13.6)-(13.11), we provide the following codes which uses’ode45’ to solve the ODEs.
Algorithm 8 model_cancer.m% This code simulates model (13.6)-(13.11).close all,clear all,% define global parametersglobal lambda delta mu theta_0 beta gamma b% starting and final timet0 = 0; tfinal = 20;% paramterslambda = 2 * 10^-2; delta = 1/18; mu = 1/48; theta_0 = 10^6; beta = 7 *10^-8; gamma = 2.5 * 10^-2;b = 100;% initial conditionsv0 = [8*10^5, 10^5, theta_0-8*10^5-10^5, 10^9, 2];[t,v] = ode45(’fun_cancer’,[t0,tfinal],v0);plot(t,v(:,5)) % Plot the evolution of the radius of tumor
Problem. 13.5. Take λ = 2 × 10−2/h, δ = (1/18)/h, µ = (1/48)/h, θ0 = 106
cells/mm3, β = 7 × 10−8 mm3/(h·virus), γ = 2.5 × 10−2/h. Compute R(t) for0 ≤ t ≤ 20h, with initial conditions x0 = 8 × 105 cells/mm3, y0 = 105 cells/mm3,v0 = 109 virus/mm3, R(0) = 2 mm when b = 50, 100, 200, 500.
Problem. 13.6. Consider the systemdx
dt= λx− βxv, dy
dt= βxv − kyz − δy,

NUMERICAL SIMULATIONS 70
Algorithm 9 fun_cancer.m% This is the function file called by model_cancer.mfunction dy = fun_cancer(t,v)global lambda delta mu theta_0 beta gamma bdy(1) = lambda*v(1) - beta*v(1)*v(4);dy(2) = beta*v(1)*v(4) - delta*v(2);dy(3) = delta*v(2) - mu*v(3);dy(4) = b*delta*v(2) - gamma*v(4);dy(5) = v(5)/(3*theta_0)*((lambda+mu)*v(1)+mu*v(2)-mu*theta_0);dy = [dy(1);dy(2);dy(3);dy(4);dy(5)];
dn
dt= kyz + δy − µn, dz
dt= syz − ωz2 − P (t)z,
dv
dt= bδy − k0vz − γv
where z = number density of immunity cells, P (t) = immune suppressor drug,x + y + n + z = θ0, k = rate of immune cell killing infected cell, k0 = take-uprate of virus by immune cells, s = stimulation rate of immune cells by infectedcells, ω = clearing rate of immune cells. We take P (t) = 8 × 10−2/h, k = 2 ×10−8 mm3/(h·immune cell), k0 = 10−8 mm3/(h·immune cell), s = 5.6 × 10−7
mm3/(h·infected cell), ω =2×10−7 mm3/(h·immune cell) and all other parametersas in Problem 13.3, z0 = 6 × 104 cells/mm3, and all other initial conditions asin Problem 9.3. (i) Compute R(t) for 0 ≤ t ≤ 20h, when b = 50, 100, 200, 500and compare the results with those of Problem 9.3. (ii) Do the same when thechemotherapy dose is increased to P (t) = 16× 10−2/h.

CHAPTER 14
T Cell Differentiation
Lymphocytes are white blood cells that play important roles in the immunesystem, the body defense against pathogens. T cells and B cells are two majortypes of lymphocytes. B cells produce antibodies against pathogens, such as bacte-ria, marking them for destruction by other lymphocytes, while T cells are involvedin autoimmunity, that is, eliminating body cells that are infected by pathogens. Thcells are the most numerious among the T cells; they are identified by the pres-ence of surface antigen (proteins) called CD4, and hence they are referred to asCD4+ T cells. As cells mature, they aquire recognizable phenotype and function, aprocess called cell differentiation. In the case of Th lymphocytes, the differenti-aition is into either Th1 or Th2 lymphocytes. Th1 cells are pro-inflammatory: theyproduce IFNγ needed to combat intracellular pathogens, and Th2 cells produce cy-tokines that activate B cells to produce antibodies against extracellular pathogens.Whether a precusor Th cell become Th1 or Th2 depends on ’polarizing’ signal.There are two important transcription factor in the Th cell: T-bet and GATA-3.The level of these transcription factors determine whether the cell will differentiateinto Th1 or Th2: if T-bet is large and GATA-3 is low, then the Th cell will differ-entiate into the pro-inflammatory Th1 cell; in the reverse case, it will differentiateinto a Th2 cell. The level of these transcription factors is determined by externalsignals.
Figure 14 represents the interaction between T-bet (x1) and GATA-3 (x2),where external signals Si upregulate xi; x2 inhibits x1 and the signal from S1 tox1. Likewise, x1 inhibits x2 and the signal from S2 to x2. Finally, x1 and x2 aregrowing in autocatalytic way, that is, they induce growth factors that make themgrow. Below we convert Figure 14 into two specific differential equations.
Figure 14.1. Diagram of interaction network between T-bet andGATA-3.
71

NUMERICAL SIMULATIONS 72
dx1
dt= −a1x1 + (b1
x61
1 + x61
+ c1S1
1 + S1)
1
1 + x2/γ1+ µ1,(14.1)
dx2
dt= −a2x2 + (b2
x62
1 + x62
+ c2S2
1 + S2)
1
1 + x1/γ2+ µ2.(14.2)
Problem. 14.1. Consider the case where a1 = a2, b1 = b2, c1 = c2, γ1 =γ2, µ1 = µ2, and S1 > S2. Show that if b1 = b2 = 0 and (x1, x2) is a stationarypoint, then x1 > x2. Try to prove this also in the case b1 = b2 6= 0.
Numerical Simulations
Compute the solution of (14.1) and (14.2) in case ai = bi = ci = 5, (i =1, 2), γ1 = 1, γ2 = 2, µ1 = 0.5, µ2 = 0.05 in the following cases:
(i) S1 = 0.05, S2 = 0.025.(ii) S1 = 1.2, S2 = 0.025.Verify that in case (i) the solution (x1(t), x2(t)) converges to one stable point,
and in case (ii) it converges to either one of two stable points depending on theinitial condition – look into the paper Friedman-Kao-Shih JDE.

CHAPTER 15
Tuberculosis
Roughly one-third of the world’s population is infected with tuberculosis (TB).However, most infections do not cause the TB disease, and 90-95% of infectionsremain asymptomatic. Apporximately 13 millions people are chronic active casesworldwide, and the annual rate is about 1.5 million. The disease is caused byMycobacterium tuberculosis, a bacterium that divides every 16-20 hours, which isextremely slow campared to other bacteria.
When the bacteria enter the lung, they are taken up by macrophages. The bac-teria then multiply inside the macrophages. Eventually the infected macrophagesdie, and the increased number of bacteria are released, and can then be taken up byuninfected macrophages. This process is partially blocked by T cells which arriveto the lung by a cue from the macrophages: the T cells attack and kill bacteriathat are inside macrophages. Nowadays the TB disease is treated by antibiotics.
In order to model the progression of tuberculosis, in introduce the followingvariables:
M = healthy macrophages,Mi = infected macrophages,B0 = bacteria external to macrophages,Bi = bacteria inside macrophages,T = T cells.
We take β to be the infection rate of macrophage by bacteria
M +B0β→ Mi +Bi,
λ the growth rate of Bi, µi the death rate of Mi, α the activation rate of T cells bymacrophages, δ the killing rate of Bi by T , µT the death rate of T cells.
We assume that when T cells kill 10 bacteria inside a macrophage, the macrophagebecomes healthy. We also assume that when a macrophage from Mi dies, 20 bac-teria are released.
We then have the following system of equations:
(15.1)
dMdt = −βMB0 + δTMi,dMi
dt = βMB0 − µiMi − δTMi,dB0
dt = −βMB0 + 20µiMi,dBi
dt = µMB0 + λBi − 20µiBi − 10δTBi,dTdt = α(M +Mi)− µTT.
Problem. 15.1. Take all parameters in (15.1), , expcet β, to be equal to 1,and initial values M = 1, B0 = 1 and Mi = Bi = T = 0. Compute the profile ofB0 +Bi for 0 ≤ t ≤ 100 for β = 1/10, 10, 100.
73

15. TUBERCULOSIS 74
Problem. 15.2. Take all the parametrs in (15.1) to be equal to 1, and initialvalues M = 1, Mi = Bi = T = 0,M0 > 0. Compute the profile of B0 + Bi forM0 = 1/10, 10, 100 for 0 ≤ t ≤ 100.