Embed Size (px)
Citation preview

ROSE-HULMAN INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering
ME 123 Computer Applications I
Introduction to Working Model Page 1 of 15
Introduction to Working Model
Welcome to Working Model! What is Working Model? It's an advanced 2-dimensional motion simulation package with sophisticated editing capabilities. It allows you to build and analyze dynamic mechanical systems, quickly and easily on your computer. Working Model gives you a tool to test, redesign, and retest a design, before ever having to build a hard physical model or prototype. How does it work? Working Model shows you a graphical workspace which allows you to select and create five general types of model objects which can be combined to create a wide variety of different systems with different mechanical parts. These five general types of object include:
Working Model
Object ID
Description
Body[#] Mass Object: Used to identity object that has mass and shape, such as circles, polygons, squares, and rectangles.
Point[#] Point Object: Used to identify isolated points or endpoints of a constraint, such as a joint, the end of a rope or rod, or a trace point.
Constraint[#] Constraint Object: Used to identify object that holds other objects together. These include joints, springs, ropes, slots, pulleys, etc.
Output[#] Output Object: Used to identify meters and graphic display devices which can show values for force, position, velocity, acceleration, time, angle, etc.
Input[#] Input Object: Used to let the user change parameters easily. These take control forms such as sliders, text boxes, and buttons.
The # in the Object ID represents an integer value that is generated by Working Model which is unique to each object created. By creating, defining, and combining these objects as individual parts of a system, you can create an infinite variety of different dynamic models. All the motion you see generated in Working Model can be traced back to Newton’s laws of motion. Working Model uses the dynamics principles:
Newton's 2nd Law: Kinematic Equations:
F = ma and T = Iα v = ds/dt a = dv/dt ω = dθ/dt α= dω/dt There are also some relationships set up for different types of friction and use of experimental results to help model collisions and inelastic behavior.

ROSE-HULMAN INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering
ME 123 Computer Applications I
Introduction to Working Model Page 2 of 15
Using these principles, equations representing the objects of a system are generated. In addition, geometric constraints are added which restrict how the system can move or to enforce the shape the objects must maintain. The geometry is checked to determine if intersections occur between different shapes. If an intersection or penetration between two objects is restricted by their definition, then the forces needed to stop this penetration are calculated and applied to the respective objects. The accelerations and velocities that result from these collision forces are calculated and applied to the objects. All the calculations which determine the subsequent motion is performed using numerical methods. Working Model has the ability to use two different differential equation simulation techniques:
Euler Method: A fast and simple simulator with uniform time steps. Kutta Merson: A more accurate simulator which may use variable time steps.
Regardless of which numerical technique is used, the general principles are the same.
1) The conditions of the system are known at the start of the problem. 2) Then very little time steps, ∆t, are taken and the dynamics model equations are integrated, to find the
condition of the system after this small time step. 3) The resulting motion is evaluated to determine if any of the constraints will be violated by this motion. If
so, some action may need to be taken to enforce the constraints. 4) The process repeats itself, building on the results of the previous time step, until the entire motion of the
system can be animated one step at a time. By displaying the entire sequence of steps, the graphic system appears to move on the screen. This gives a graphic simulation of the model. What do we want you to be able to do in these few lectures? Learn how to create and run simulations of simple systems. The specific skills with Working Model include:
1) Learn how to create mass objects and specify their properties, geometry and appearance. 2) Learn how to constrain the mass objects with respect to the background and with respect to other mass
objects. 3) Learn how to apply constant and variable forces or moments to the system. 4) Learn how to measure and display the dynamics properties of the objects during a simulation of the system. 5) Learn how to create controls to set parameters or properties of the system objects. 6) Learn how to adjust the effects of gravity, friction, and other environmental (world) interactions of the
model. 7) Learn how to link the model with data from Excel or Matlab.
Tutorial 1: Understanding the Working Model workspace: What you will do during Tutorial 1:
a) Tour of the workspace of Working Model. b) Learn how to set up the environment of Working Model. b) Creating a simple projectile motion simulation. c) Run the simulation. d) Measure and display the output from the simulation. e) Create controls for input to the simulation.

ROSE-HULMAN INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering
ME 123 Computer Applications I
Introduction to Working Model Page 3 of 15
Exploring the Workspace The Menu Bar has access to all Working Model commands.

ROSE-HULMAN INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering
ME 123 Computer Applications I
Introduction to Working Model Page 4 of 15
Toolbars are used to quickly access the most commonly used commands. The following toolbars and commands are available in Working Model.
Standard Toolbar: New Open a new, blank Working Model document with the current default settings. Open Open a previously created Working Model document. File Save the current Working Model Document Cut Remove selection from document and place them in the Clipboard
Copy Copy selection from document and place them in the Clipboard Paste Paste the contents of Clipboard into the current document. Print Print the current document. Help Access Working Model's help feature.
Edit Toolbar: Arrow Tool Mode to select and drag objects on the screen Rotate Tool Mode to rotate objects about the mass center Text Tool Mode to enter text directly into the simulation workspace Zoom In Mode to double magnification of screen image centered on mouse click
Zoom Out Mode to half magnification of screen image centered on mouse click
Run Control Toolbar: Run Start a simulation Stop Stop a simulation Reset Reset the simulation back to the start position

ROSE-HULMAN INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering
ME 123 Computer Applications I
Introduction to Working Model Page 5 of 15
Body Toolbar:
Circle Used to create circular mass objects. Square Used to create square mass objects Polygon Used to create irregularly shaped mass objects by defining each point with a
click. Double click to signal the last point. Curved Polygon Used to create irregularly shaped mass objects with a curved perimeter.
Rectangle Used to create rectangular mass objects. Anchor Used to lock the motion of mass objects. Motion can be at rest when locked to
the background, or locked onto a property’s formula.
Join/Split Toolbar: Join Used to joint two elements. Elements that may be joined are points, square
point, and slot elements. To join 2 elements, select the first element, hold Shift down and select the 2nd element, select Join Button.
Split Used to temporarily separate a joint into its component parts. A dashed line will indicate the original joint, and may be reconnected using Join.
Point Toolbar: Point Element Used to create a point. Points may be used to provide a location to read
measurements or may be used to make joints. Square Point Element Used to create a square point element. Can be joined with a slot to form a
keyed slot or with another square point element to form a rigid joint. Horizontal Slot
Element Used to create a horizontal slot element.
Vertical Slot Element Used to create a vertical slot element. Curved Slot Element Used to create a curved slot element with a series of smoothly interpolated
control points. Double click to signify last point. Closed Curve Slot
Element Used to create a slot consisting of a smooth, closed curve. Click to define each point. Double click to signify last point.
Joint Toolbar: Pin Joint Used to create a pin joint between two overlapping objects at the location of
the pin, or between one object and the background. Rigid Joint Used to create a rigid joint between two overlapping objects at the location of
the pin, or between one object and the background. Horizontal Slot Joint Used to create a horizontal pinned slot joint, by creating a point on one mass
and a slot on the second object or background. Horizontal Keyed Slot
Joint Used to create a horizontal keyed slot joint, by creating a point on one mass object and a slot on the second object or background.
Vertical Slot Joint Used to create a vertical pinned slot joint, by creating a point on one mass and a slot on the second object or background.
Vertical Keyed Slot Joint
Used to create a vertical keyed slot joint, by creating a point on one mass object and a slot on the second object or background.
Curved Slot Joint Used to create a curved slot joint, by creating a point on one mass object and a slot on the second object or background.
Closed Curved Slot Joint
Used to create a curved closed slot joint, by creating a point on one mass object and a closed slot on the second object or background.

ROSE-HULMAN INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering
ME 123 Computer Applications I
Introduction to Working Model Page 6 of 15
Construction Toolbar:
Rotational Spring Used to create an object that produces twisting force upon deformation. Attach to two objects or to one object and background.
Spring Used to create an object that resists compression and stretching. May be attached to two objects, or one object and background
Rotational Damper Used to create an object that produces twisting force proportional to ang. velocity. Attach to two objects or to one object and background.
Damper Used to create an object that exerts force proportional to velocity. May be attached to two objects or to one object and background.
Gear Used to connect two rotational objects to act as a pair of rotational gears. Spring Damper Used to create a combination spring-damper. May be attached to two objects
or to one object and the background. Torque Use to apply a twisting force to an object. Can be positioned at any point on an
object. Force Used to apply a force to an object. Can be positioned at any point. Direction
may be fixed with respect to background or mass object. Motor Used to exert a twisting force between two masses or between one object and
the background. Actuator Use to create a constraint that exerts a force, torque, rotation, velocity, or
acceleration between its end points. Rope Used to create a slack connection that prevents separation between two objects
or object and background by more than a given distance. Separator Used to create an object which prevents moving closer than a specified
distance. Pulley Used to create a rope system with several pulley. Click to define each pulley;
double Click to signal end of pulley system. Rod Used to create a massless, inflexible link between two mass objects, or
between one object and the background. To manipulate objects in Working Model: Objects are manipulated in Working Model primarily using a mouse. The following are the types of selection used for different commands.
Terms: Meaning: Point: Pointing is simply moving the pointer on to an object on the screen.
To point, move the mouse until the pointer touches the item you want. Click
Clicking begins an action at the pointer’s location. To click quickly press and release the mouse button without moving the mouse
Double-click Double clicking is usually a way to display the contents of an icon or document, or to start an application program. To double-click, click the mouse button twice in rapid succession without moving the mouse
Shift-click Shift clicking is a variation of clicking to you use to select multiple icons or objects that are not near each other, or to select only some of the items in a group. To Shift-click, press the Shift key on the keyboard and click on each object that you want to select. Each object becomes highlighted when you click on it.
Hold down Holding down a mouse button keeps the icon highlighted, or continues to show the items on a menu so you can view them. To hold down, press the mouse button without releasing or moving the mouse.
Drag Dragging allows you to move an item on the screen as you move the mouse. You also drag to move an icon or a window and to select a group of icons. To drag, press and hold down the mouse button while you move the mouse. The object remains highlighted when you release the button.

ROSE-HULMAN INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering
ME 123 Computer Applications I
Introduction to Working Model Page 7 of 15
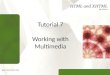
Example 1: Projectile Motion We want to create a simulation of a projectile being shot off a ledge with known initial velocity, V, and angle, θ By working through the steps of creating this model you will learn how to:
• set up simulation environment and select unit system • create the objects that make up the model • run the simulation • fix stationary objects • specify properties, appearance, and geometry of objects • change the viewing area of the simulation • change the accuracy of the simulation calculations • create meters for measure output quantities • create controls to specify input parameters • use playback to examine the simulation in detail • save the simulation model
Step 1: Start up Working Model by clicking on the
Start All Programs WorkingModel .....then wait for the application to start up.
Step 2: Turn on additional background features. From the Menu bar, click on
View... Workspace...
Then make sure these Navigation options are checked: Coordinates Rulers Grid Lines X Y Axes
Also, on the Menu bar click on View... Put a check mark on the Grid Snap option.
V θ h = 10 ft V = 50 ft/s θ = 53.3° R = ?

ROSE-HULMAN INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering
ME 123 Computer Applications I
Introduction to Working Model Page 8 of 15
To save these selections and have them become the default setting select from the Menu bar click on
World... Preferences... Save Current Setting
Now the next time you open up a new document in Working Model, the Coordinates, Rulers, Grid Lines, XY Axes, and the Snap feature will automatically be turned on. Step 3: Before creating our objects, let’s pick a system of units to work with. On the Menu bar select
View... Numbers and Units .
In the Numbers and Units dialog box, click on More Options English (slugs) for Unit Systems Feet for Distance units
Step 4: Now we are going to create several circular mass objects. To create a circle:
Single Click on the Circle Button: Then anywhere within the workspace, click... point (move mouse)... and click
This will define a circle by defining two points on its circumference. After creating the circle, the circle feature will be automatically turned off, and the Arrow tool pointer will be active again. (The arrow tool is used for selection) Try creating a circle again, but this time Double click on the circle button. Notice that this time when you create circles, the circle feature stays on, until you select a different object button or the Arrow tool button. Go ahead and create at least 6 more circles of varying size. After creating these clicks on the Arrow Selection Button to turn off Circle feature. Move the pointer (should be an arrow) to one of the circles and click on the circle. (It should be highlighted with four small black boxes surrounding it). Delete it at this time. You can select several items successively, by holding down the Shift key and continuing to select additional objects. Click on 3 of the circles, selecting one at a time while holding down the Shift key. Delete these three circles all at the same time.
Rule for use of Tool Buttons: Single Click to make a single object. Double Click to make a number of successive objects.

ROSE-HULMAN INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering
ME 123 Computer Applications I
Introduction to Working Model Page 9 of 15
One other way to select more than one object at the same time is to enclose a number of objects in a selection box. To create a selection box, click on a background point in the workspace and drag the pointer across and down to form a box that encloses a number of objects. All objects that are fully enclosed inside the box when you click at the opposite corner will be selected. Now use a selection box to select all of the remaining circles and delete them. Now that we’ve deleted all circles, go back and create about a 2 foot diameter circle near the coordinate of (x,y) = (15,10). Step 5: In this step we will create two rectangular mass objects. Since we will be making two rectangular objects Double click on the Rectangle Object button. Using the coordinates shown on the rulers and grid (and also in the coordinate displays) draw:
Rectangle A with corners at (x,y) = (-5,0) and (0,10) Rectangle B with corners at (x,y) = (-5,0) and (30,-1)
When done, click on the Arrow Tool Button to release the rectangle tool. This should give you a system that looks like the one shown below:

ROSE-HULMAN INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering
ME 123 Computer Applications I
Introduction to Working Model Page 10 of 15
Step 6: Working Model provides us with the means to specify many characteristics associated with a mass object. These characteristics include:
Properties: Quantities associated with a body’s motion and dynamic behavior such as position, velocity, acceleration, material, mass, friction coefficients, and elastic constant.
Appearance: Quantities associated with bodies screen appearance such as color, label, outline type, pattern, and
tracking status. Geometry: Quantities associated with the shape of the mass object, such as diameter, width, height, or the
vertices of any points defining a polygonal shape. To change the characteristics of an object you need to open the appropriate dialog box which controls those characteristics. There is a different dialog box for each of these three categories. To open the respective dialog boxes for Properties, Appearance, and Geometry, select
Menu... Window... Properties or Appearance or Geometry
Using any of the three dialog boxes shown, on the scroll list, make Body[1]-Circle the active object. Your screen should look like the figure below:

ROSE-HULMAN INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering
ME 123 Computer Applications I
Introduction to Working Model Page 11 of 15
Make the following changes for the circle in each of the dialog boxes shown. Close the dialog boxes when you are done. Select the ball, and you will see a vector showing the initial velocity of the ball. Step 7: Before we can run our simulation, we need to anchor the platform and linear base to the background. If we didn’t do this …. well, let’s just demonstrate what would happen by actually running the simulation before our model is complete. Start the simulation by Clicking the Run Button.... Notice how our objects fall away as if gravity is pulling everything down. Hit the Stop and Reset Button to reset the model. To stabilize the base, add an anchor to both of the rectangular mass objects. Click on Anchor and place the point (the top part of the anchor) on top of each of the rectangles, and click. This will anchor the rectangular mass objects to the background. After stabilizing the base, Run the simulation again. This time the base should stay put. After running the simulation, Stop and Reset the simulation. Step 8: Zooming In and Out. When you ran the simulation in Step 7, the ball quickly flew out of the screen picture. Since we would like to see just where it passes through y = 0, it would be to our advantage to be able to have a larger view of this model. Zoom In and Zoom Out can allow us to change the size of the viewing area by a factor of 2. When Zoom In is selected each click on the workspace will Zoom In by a factor of 2. If Zoom Out is selected, each click on the workspace will Zoom Out by a factor of 2. Select Zoom Out and click near the middle of your model twice. Your viewing area will have increased by 4 times. Run the model again and see if you can determine the approximate x value where the projectile crosses the x axis.
Geometery: Radius = 0.500 ft
Properties: x = 0.0 y = 10.5 Vx = 30 Vy = 40 material : Steel
Appearance: Fill: red Frame: blue Name: form Circle to Ball Set up checks by - Track center of mass - Show - Show name
Ball crosses the x-axis near _____________________ ft.

ROSE-HULMAN INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering
ME 123 Computer Applications I
Introduction to Working Model Page 12 of 15
Step 9: Extending the floor. In Step 8, the ball should have crossed the x-axis between 80 and 85 ft out. To see it bounce off the floor, we will need to extend rectangle B out at least that distance. Open up the geometry dialog box and change the width of Rectangle[3] to 150 ft Open up the properties dialog box and change the x position of Rectangle[3] to 70 ft. Now Run the simulation. What funny thing happened? _______________________________________________________________ ________________________________________________________________________________________ Can you think of a reason why this happened? __________________________________________________ ________________________________________________________________________________________ Step 10: Increasing the accuracy of the model: While Working Model tries to pick the proper size of time step and the amount of precision needed to ensure that bodies don’t interfere with or penetrate other surfaces, sometimes it will need some help. In this case the ball passed right through the floor. Most likely decreasing the time step or decreasing the Overlap error will improve the model’s simulation. Select
Menu.... World ... Accuracy...
To bring up the Simulation Accuracy dialog Box. To decrease the time step, select Custom and set the Integration Step as Fixed at 0.020 sec Also set the Overlap Error to 0.1 ft. Save these settings by clicking OK. Now Run the simulation. This time the ball doesn’t fall through the floor but it does take longer to run. That’s the price you pay for smaller time steps and additional computation.

ROSE-HULMAN INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering
ME 123 Computer Applications I
Introduction to Working Model Page 13 of 15
Step 11: Add meters to show the time of travel, position, and velocity of the ball Since we are going to be tracking the position of the ball, let’s first click on the ball to make it our current selected object. We will now create three meters. for Time Meter for Position meter for Velocity meter .from Menu bar.... .... Menu bar.... ... Menu bar Measure... Measure... Measure... Time Position... Velocity... All All The Time meter will be a measure of time of travel. The Position of Ball1 meter shows x position, y position, and rotation of the ball. We are not interested in the rotation of the ball here so click on the rot button to turn it off. The Velocity of Ball1 meter shows x velocity, Vx, y velocity, Vy, velocity magnitude, |V|, and the rotational velocity, Vo. Click on both the |V| and Vo to turn off these two meter readings. Drag the meters to the positions shown in the workspace as seen on the figure at right: Once again, Run the simulation. While the simulation is running, try clicking on the arrow in the upper left of the control boxes. Notice how the style of the display changes. Three different types of display are available and clicking the white arrow cycles through the different output styles. These include: Numerical Meters Bar Graphs X-Y Plots Step 12: Use of the Tape Player Controls. Using the tape player controls at the bottom of the screen, we can run the simulation forward and backward, as well as stepping through the simulation one step at a time. We can even click and drag the tape position marker to quickly move through the simulation. Play with the tape player controls and figure out how to step back to the point where the ball first hits the floor. What was the x position at this first impact? _________________ ft At what time did the first impact occur? ____________________ sec What was the maximum height of the first bounce? ___________ ft

ROSE-HULMAN INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering
ME 123 Computer Applications I
Introduction to Working Model Page 14 of 15
Step 13: Adding Input Controls to our simulation. If we want to change the initial conditions of the ball (Vxo = 30 ft/s and Vyo = 40 ft/s) we can always open up the Properties Dialog Box and type in new values. Another option is to add controls to the workspace that give us direct control of these values. We would like to add two slide controls that specify the total velocity and direction of the ball. Click on
Menu Define.... New Control.... Generic Control
Repeat these steps and create a second Generic Control. Open up the Property Dialog Box of each New Generic Control.
Set the first control to the range of 0 to 100 Set the second control to the range of 0 to 90 and the number of snaps to 90.
Open up the Appearance Dialog Box of each New Generic Control
Set the name of the first control from Generic Control to Initial Velocity Set the name of the second control from Generic Control to Initial Angle
To make these controls active we need to link them to the quantities they will be used to set. We want them to set the initial x and y velocities of the ball, so we will have to change the properties of Body[1]- Ball. To do so, Double click on the ball to open up the Properties Dialog Box. Since the quantities, x velocity and y velocity are found by Vx = V cos(θ) and Vy = V sin(θ) we will need to type in an appropriate formula to express these. These can be expressed in terms of the control variable from the slider controls.
For Vx type in the following: Input[9]*cos(Input[10]*3.1459/180) For Vy type in the following: Input[9]*sin(Input[10]*3.1459/180)
Note: If for some reason your inputs for Initial Velocity and Initial Angle are other than Input[9] and Input[10] then you need to use the numbers given to your Input Objects. What purpose did the 3.1459/180 serve? ___________________________ Close the Properties Dialog Box, and test your set of controls. For the first run, use values similar to what they were before, so set the slider to values such as Initial Velocity = 50 ft/s and Initial Angle = 53 degrees. If everything was done correctly, this will give you a plot very similar to your original trajectory.

ROSE-HULMAN INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering
ME 123 Computer Applications I
Introduction to Working Model Page 15 of 15
Step 14: Documentation As with other programs, Working Models simulations should also have documentation that describes what the programs does, how to use it and what the output is. I would also like you to include your name and the date you created it. Text is easily added to the simulations by use of the Text button. Click on the Text button, click on a location within the workspace where you will be adding your documentation. Also add units beside the magnitudes shown for the slider controls. That completes the construction of our projectile motion simulation, so save your simulation file...using the Save button or using Menu... Save