Embed Size (px)
Citation preview

Introduction to Robot Design:
Gui Cavalcanti5/12/2011
Locomotion and Manipulation
Overview
• Locomotion– Types of
locomotion– Stability– Locomotion
design–Models– Types of control– Gaits
• Manipulation– Compliance– Forward
kinematics– Inverse
kinematics
Types of Locomotion
• Air– Planes– Helicopters– Ornithopters
• Ground–Wheels– Tracks– Legs
• Water– Propellers– Fins– Buoyancy Control
• Space– Rockets– Inertial
Orientation
Stability
What makes a hot air balloon stable?
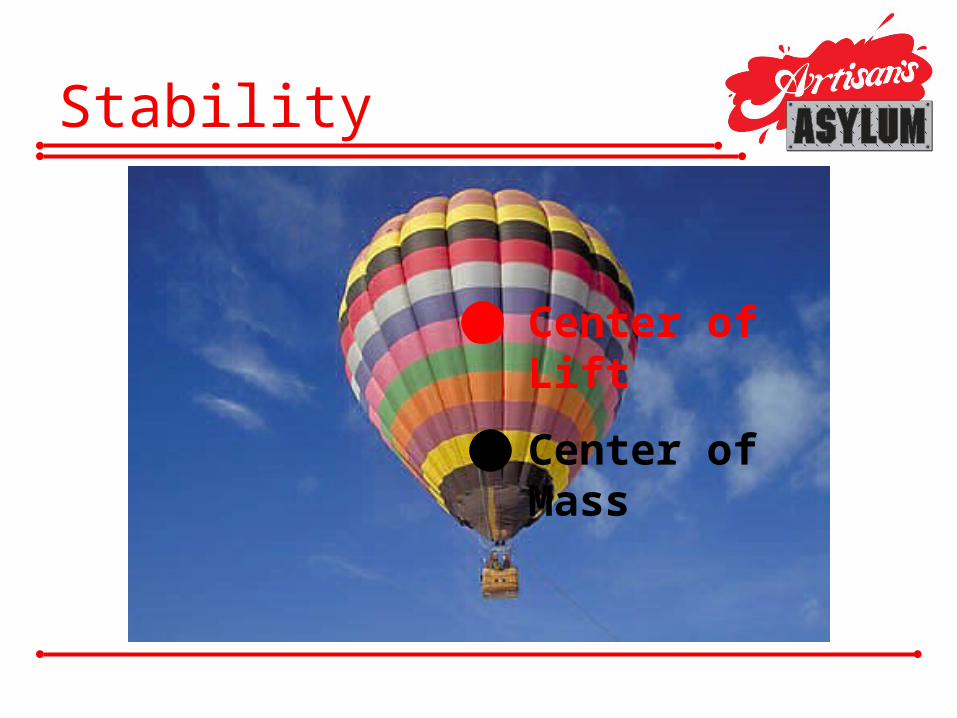
Stability
Center of Lift
Center of Mass
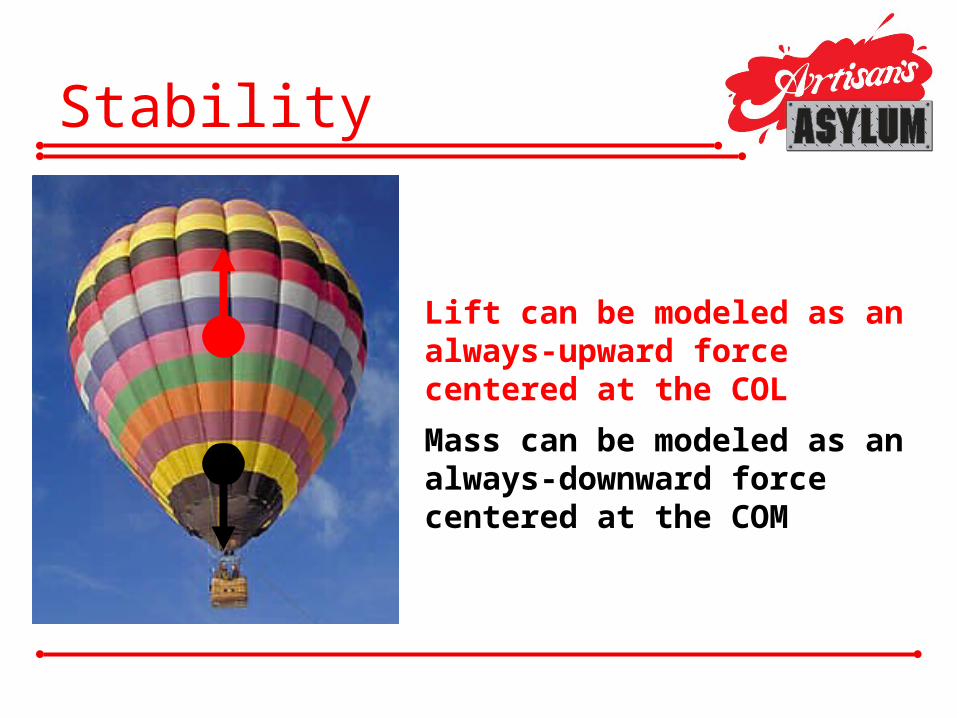
Stability
Lift can be modeled as an always-upward force centered at the COL
Mass can be modeled as an always-downward force centered at the COM

Passive Stability

Air Locomotion
Air Locomotion• Planes
– Wings are shaped to use forward velocity to generate lift– Control surfaces on wings control orientation changes
• Helicopters– Spinning wings (the rotor) are shaped to use rotational
velocity to generate lift independent of forward velocity– Many configurations of additional rotors and control of
existing rotor blade orientation provide orientation changes
• Ornithopters– Flapping, passively-compliant wings deform into airfoils
to produce forward velocity and lift at each wingstroke– Shaped tails or differences in wing amplitude control
orientation changes
Planes• Design space:
– Many existing, robust easy-to-modify RC plane kits to choose from.
– Designing one from scratch is still a guess-and-try science
– Bare minimum for robot control: Attitude sensing, inertial measurement, flap control
• Existing robots:– Global Hawk, Reaper,
Predator
Predator UAV
Global Hawk
RC Plane Kit
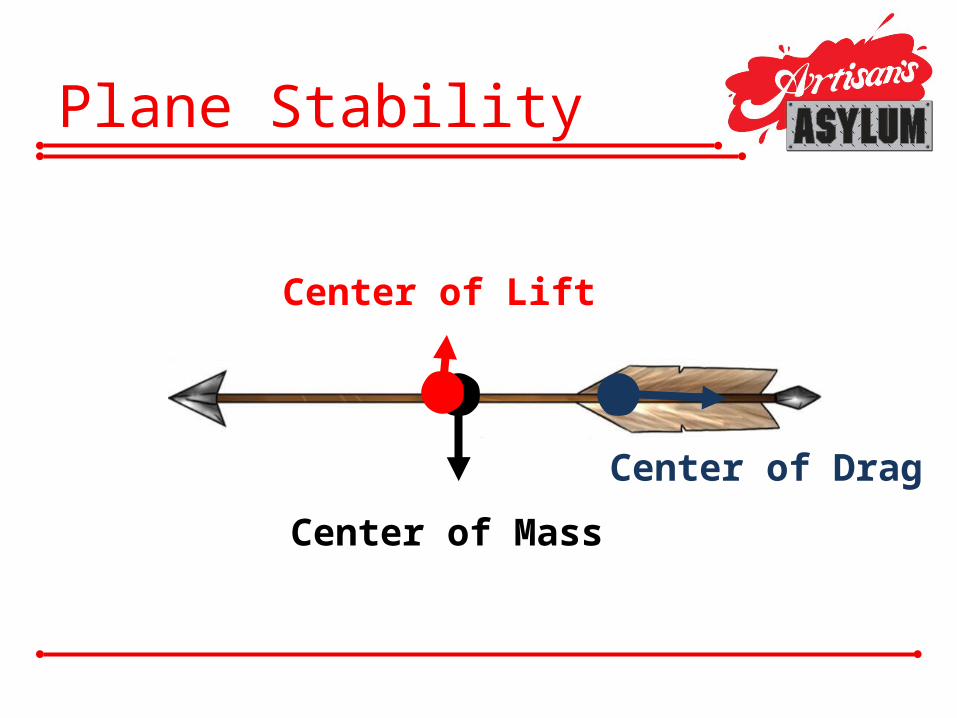
Plane Stability
Center of Lift
Center of Mass
Center of Drag

Plane Instability
Plane Instability
• Center of Drag close to or in front of Center of Lift– Plane always wants to flip end over end– Innate tendency makes the plane
incredibly maneuverable– Only computerized control can keep it
level– All new fighter planes are robot planes
Helicopters• Design space:
– Many existing RC helicopter kits, VERY DIFFICULT to make autonomous. Quadrotors are the way to go.
– Designing a classic helicopter from scratch is incredibly difficult, quadrotor much less so
– Bare minimum for robot control: Attitude sensing, inertial measurement, fine motor control
• Existing robots:– Firescout, Draganflyer,
Parrot AR.Drone
Parrot AR.Drone
Fire Scout
Draganflyer III

Helicopter Stability
Helicopter Stability
• It seems stable, but…– Huge amount of lift is required to keep a
mass in the air–When that lift is redirected, mass both:• Drops• Moves sideways very quickly
– Helicopters need to constantly vary throttle to stay level while maneuvering
Ornithopters
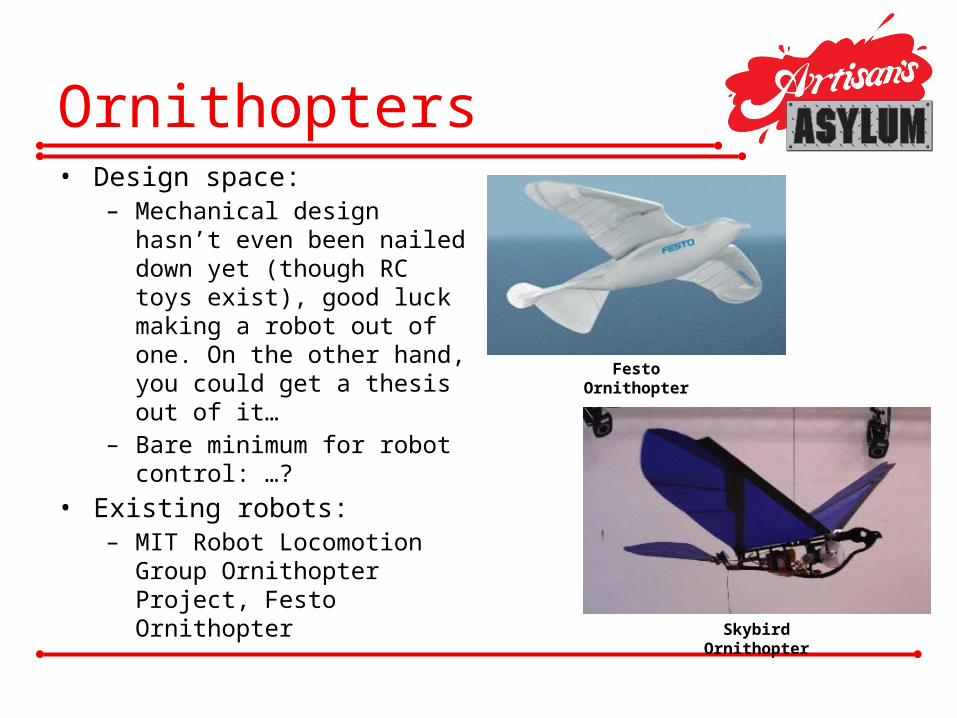
• Design space:– Mechanical design hasn’t
even been nailed down yet (though RC toys exist), good luck making a robot out of one. On the other hand, you could get a thesis out of it…
– Bare minimum for robot control: …?
• Existing robots:– MIT Robot Locomotion
Group Ornithopter Project, Festo Ornithopter
Festo Ornithopter
Skybird Ornithopter

Ground Locomotion
Ground Locomotion• Wheels
– One or more wheels are used to roll over terrain. Multiple wheels, body configurations and suspension used to cover broken terrain.
– Turning wheels in place or spinning wheels in opposite directions used to control orientation
• Tracks– Tracks composed of multiple links wrapped around pulleys and
form one continuous mobile surface
– Spinning tracks in opposite directions used to control orientation
• Legs– One or more legs are used to step over terrain. Multiple legs
and control styles are used to cover broken terrain.
– Stepping in an appropriate pattern used to control orientation
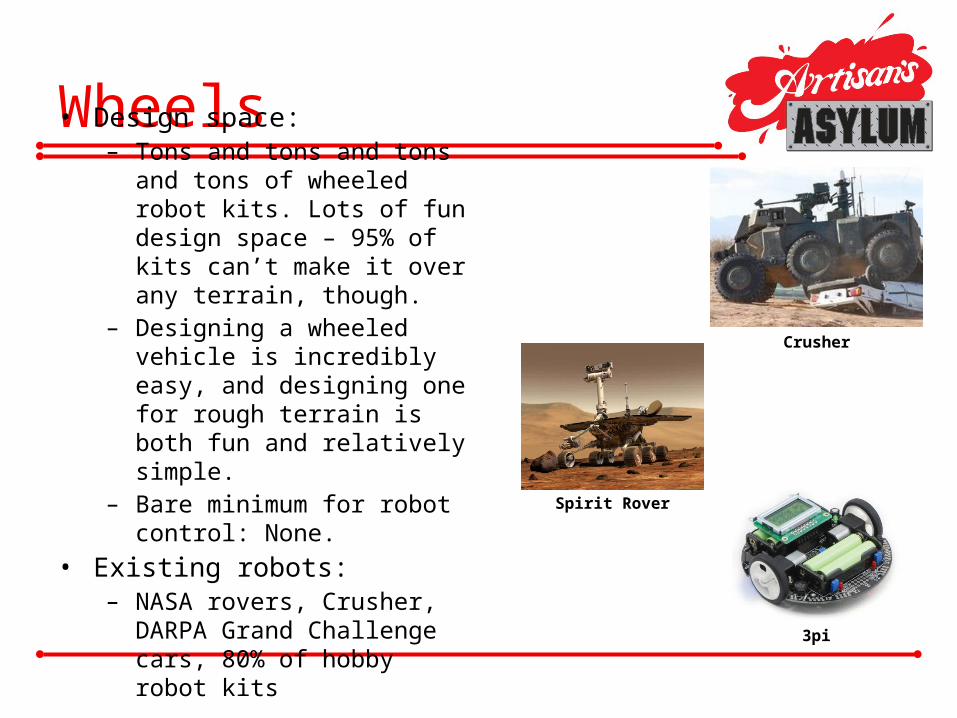
Wheels• Design space:
– Tons and tons and tons and tons of wheeled robot kits. Lots of fun design space – 95% of kits can’t make it over any terrain, though.
– Designing a wheeled vehicle is incredibly easy, and designing one for rough terrain is both fun and relatively simple.
– Bare minimum for robot control: None.
• Existing robots:– NASA rovers, Crusher,
DARPA Grand Challenge cars, 80% of hobby robot kits
Crusher
Spirit Rover
3pi
Design Exercise!
• How do you design a wheeled vehicle to traverse a bump as large as its wheels?
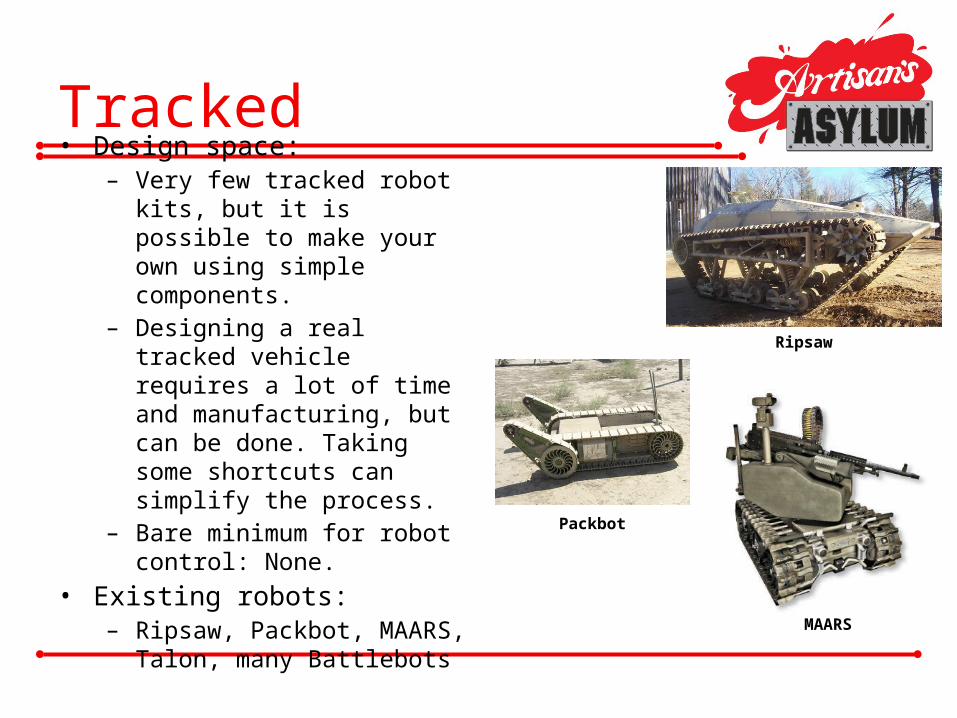
Tracked• Design space:
– Very few tracked robot kits, but it is possible to make your own using simple components.
– Designing a real tracked vehicle requires a lot of time and manufacturing, but can be done. Taking some shortcuts can simplify the process.
– Bare minimum for robot control: None.
• Existing robots:– Ripsaw, Packbot, MAARS,
Talon, many Battlebots
Ripsaw
Packbot
MAARS
Design Exercise!
• What happens to a tracked vehicle trying to traverse the same bump from the previous question?
Design Question?
• Why would you pick tracks over wheels, or vice versa?

Ripsaw

Packbot
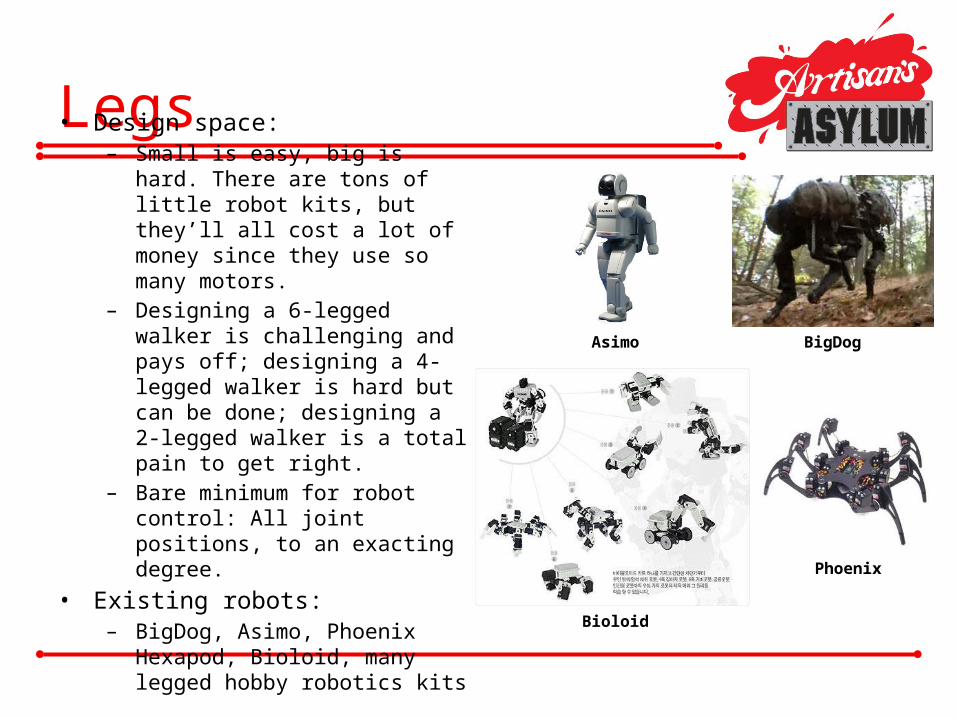
Legs• Design space:
– Small is easy, big is hard. There are tons of little robot kits, but they’ll all cost a lot of money since they use so many motors.
– Designing a 6-legged walker is challenging and pays off; designing a 4-legged walker is hard but can be done; designing a 2-legged walker is a total pain to get right.
– Bare minimum for robot control: All joint positions, to an exacting degree.
• Existing robots:– BigDog, Asimo, Phoenix
Hexapod, Bioloid, many legged hobby robotics kits
BigDogAsimo
Phoenix
Bioloid
Legged Locomotion Topics
• Polygon of Support and Center of Pressure
• Dynamic and Static Balance– Force control and position control
• Spring-Loaded Inverted Pendulum (SLIP)
• Gaits
Polygon of Support/Center of Pressure
• Polygon of Support:– The stable shape defined by the outer
edges of a body’s contact with the ground
• Center of Pressure:– The center of force from the ground,
pushing up on a body
Dynamic Balance/Static Balance• Static Balance:– Keeping your center of mass projected
onto your polygon of support, and your center of pressure as aligned with your center of mass projection as possible.
• Dynamic Balance:– Relying on multiple footfalls or a
dynamically changing center of pressure to maintain balance.
Force Control/Position Control• Position control:– Control of trajectories and exact
positions at all times, with forces and velocities resulting from desired positions
• Force control:– Control of force at all times, with
positions and velocities resulting from desired forces
• What do we do as human beings?
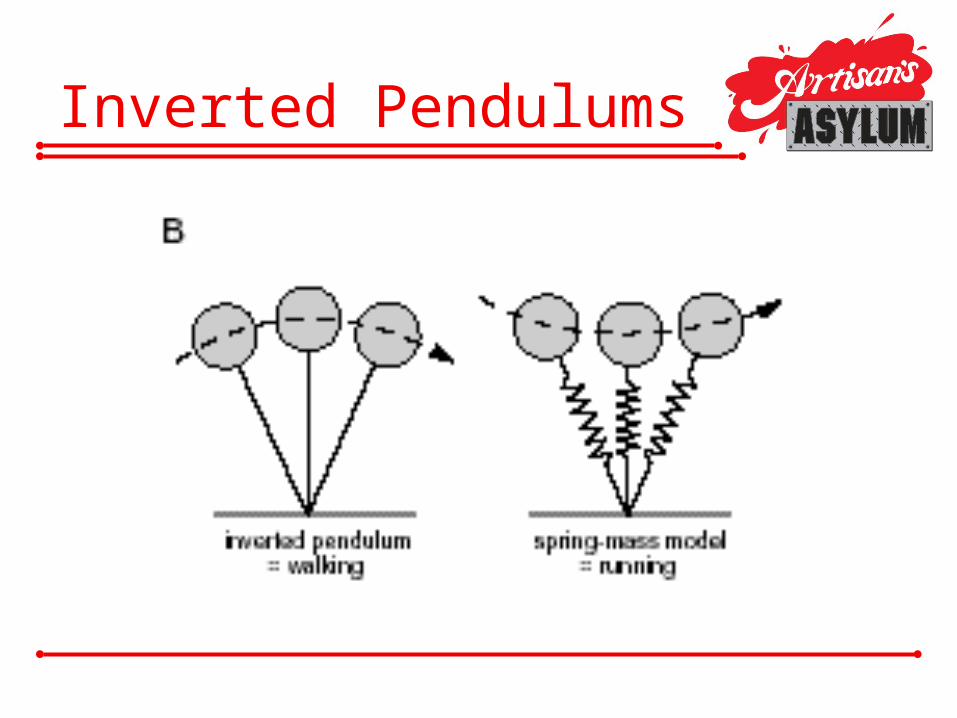
Inverted Pendulums
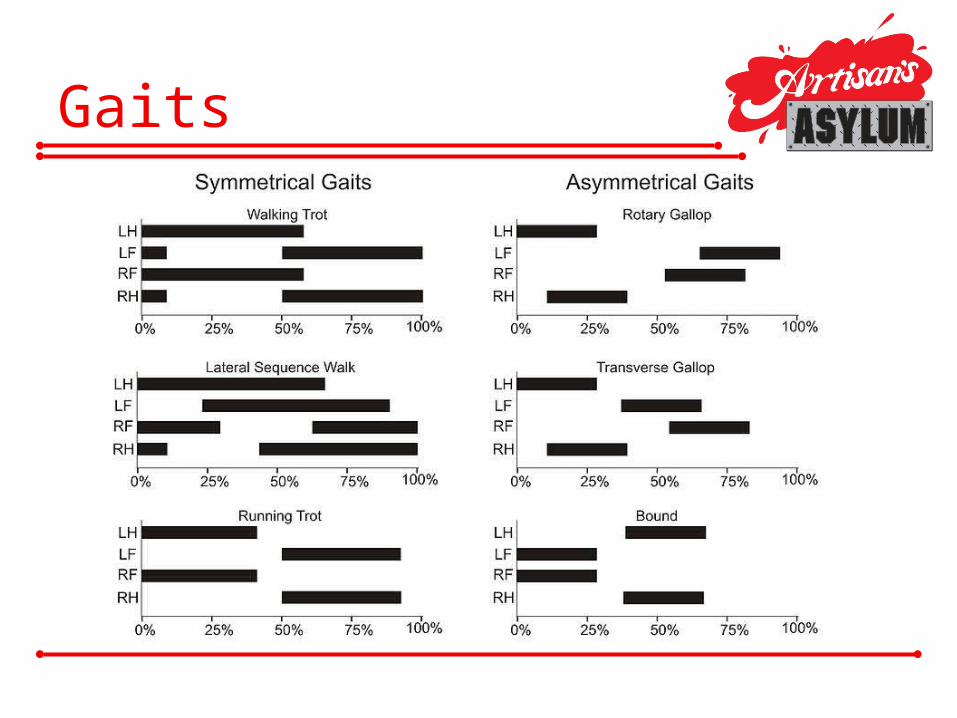
Gaits
• Gait:–What legs you put down in what order
Gaits
Design Challenge!• Design a gait for a four-legged animal and
execute it.
• Design a gait for a six-legged animal and execute it.
• Fastest team to run the length of the building outside wins.
• Rules:
– Team must stay a cohesive, connected whole throughout the entire run
– Footfall patterns must be repeated throughout the run. No changing gaits on the fly!
– Teams get three attempts per animal type


























![Locomotion [2014]](https://img.pdfslide.us/doc/110x75/5564e3eed8b42ad3488b4e94/locomotion-2014.jpg)