Embed Size (px)
Citation preview

Dipartimento di ingegneria dell’Informazione – Università di ParmaDottorato di Ricerca in Tecnologie dell’Informazione
a.a. 2005/2006
Introduction to Dynamic Path Inversion
Aurelio PIAZZIDII, Università di Parma
25 January 2006

A. Piazzi Introduction to Dynamic Path Inversion
2
Outline• Introduction• The problem and differential flatness• A selection of solved problems• Geometric continuity of Cartesian paths

A. Piazzi Introduction to Dynamic Path Inversion
3
Introduction
In the previuos lesson we have posed and solved (forlinear and scalar systems) the
stable dynamic input-output signal inversion problem
Σ( )y t( )u t
For multivariable systems the signal inversion problem is:
Given a desired bounded ( ) pdy t ∈ find a
bounded ( ) pdu t ∈ such that ( )( ), ( )d du t y t ∈ B .

A. Piazzi Introduction to Dynamic Path Inversion
4
Introduction
For multivariable systems the inversion problem can alsobe posed as a
stable dynamic input-output path inversion problem
The idea is to consider the output signal y(t) a function(curve) parameterization of a path Γ in the output space Rp. For a given time interval [0, t1] Γ = y([0, t1]).
1y2y
3yΓ

A. Piazzi Introduction to Dynamic Path Inversion
5
The problem and differential flatness
Dynamic Input-Output Path Inversion Problem:
Given a path pΓ ⊂ and a traveling time 1 0t > find initial conditions and input ( )u t for which the system output ( )y t safisfies ( )1[0, ]y t = Γ
This problem is quite general and especially relevantfor the motion control of nonholonomic wheleedvehicles.

A. Piazzi Introduction to Dynamic Path Inversion
6
The problem and differential flatness
The path inversion problem has a strong connection with differential flatness (Fliess et al. 1993).
A system with m (scalar) inputs is said to be (differentially) flat if there exist m outputs yF1 , . . . , yFmfor which the system variables (the states and the inputs) can be algebraically expressed as functions of the yFi’s and their derivatives (till a finite order).
1The vector ( , , ) is called fthe lat outp . utF F Fmy y y= …

A. Piazzi Introduction to Dynamic Path Inversion
7
The problem and differential flatness
1
Consider the nonlinear system in state-space form:( , )
, ,( , )
is differentially flat if there exists a vector-valued function ( )for which defining
[ , , ] ,
m n p
TF F Fm
x f x uu x y
y g x uh
y y y
y
Σ
=⎧∈ ∈ ∈⎨ =⎩
Σ ⋅
= …
( )1
1
1
1 1
1 1
111 1
, , , , , , ,
there exist functions ( ) and ( ) satisfying:( , , , , , , ),
( , , , , , , ).
m
m
m
F m m
F F Fm Fm
F F Fm Fm
h x Du D u Du D u
A Bx A y D y y D y
u B y D y y D y
ββ
αα
αα ++
=
⋅ ⋅
=
=
… … …
… … …… … …

A. Piazzi Introduction to Dynamic Path Inversion
8
The problem and differential flatness
The dynamic path inversion problem is (relatively) easy to solve when the system is differentially flat and the actual output is flat (y = yF ).
( )1
:Given the path choose a velocity planning on itto find the trajectory ( ) for which [0, ] .Then, determine the initial conditions (0) and theinput signal ( ) by applying
y t y tx
u t
Γ
= Γ
Conceptual solution
the functions ( ) and ( ).A B⋅ ⋅
Proving that y is flat may be not trivial…

A. Piazzi Introduction to Dynamic Path Inversion
9
A selection of solved problems
Solved path inversion problems:
1) car-like vehicle (Nelson 1989, Rouchon et al. 1993, Reuter1998, ARGO Project: Guarino, Piazzi, Bertozzi, Broggi, Fascioli, 1999, 2002 )
cossin
tan
x vy v
vl
θθ
θ δ
⎧⎪ =⎪
=⎨⎪⎪ =⎩
±
µ
x
y
l

A. Piazzi Introduction to Dynamic Path Inversion
10
A selection of solved problems
δ
θ
P
Q
d
Γ
l
wz
τν
Consolini, Piazzi, Tosques 2001, 2003

A. Piazzi Introduction to Dynamic Path Inversion
11
A selection of solved problems
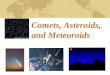
2) Unicycle mobile robot (solution with smooth velocities, Guarino, Piazzi, Romano 2004 TR)
cossin
x vy v
θθ
θ ω
=⎧⎪ =⎨⎪ =⎩
x
yθ

A. Piazzi Introduction to Dynamic Path Inversion
12
A selection of solved problems
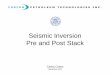
3) Wheeled omnidirectional robot (Guarino, Piazzi, Romano 2002): an holonomous model.
x
yθ1
3
2

A. Piazzi Introduction to Dynamic Path Inversion
13
A selection of solved problems
4) General n-trailer system (Rouchon et al. 1993, Altafini 2002, …)
5) VTOL model (Consolini, Tosques 2004 CDC): a nonminimum-phase system.
6) Chaplygin-like nonholonomic systems (Tosques, Consolini 2003 ECC).
7)….
The general dynamic path inversion is an open research problem

A. Piazzi Introduction to Dynamic Path Inversion
14
A selection of solved problems
The solution to the path inversion problem is an input signal thatcan be used as a feedforward control.
In preview of a practical application how to complement thisfeedforward with a feedback action?
1. Path-error feedback correction (classic approach to pathfollowing: various schemes can be devised)
2. Iterative steering (Lucibello, Oriolo 1996 CDC, Automatica 2001). Originally it was proposed as a novel approach tostabilization of nonlinear systems.
3. Path-error feedback correction plus Iterative steering.

A. Piazzi Introduction to Dynamic Path Inversion
15
A selection of solved problems
Iterative Iterative steeringsteering conceptconcept appliedapplied toto the the pathpath followingfollowing problemproblem
idial desired path
replanned path
actual path
Iterative steering requires a supervisor architecture…

A. Piazzi Introduction to Dynamic Path Inversion
16
Geometric continuity of Cartesian paths
Relevant issues for the path inversion problemRelevant issues for the path inversion problem
Apart differential flatness other issues are:• Nonholonomy• Minimum-phase/Nonminimum-phase• Geometric continuity of paths

A. Piazzi Introduction to Dynamic Path Inversion
17
Geometric continuity of Cartesian paths
A curve on the Cartesian plane can be described by
the map p(u), u ∈ [u0, u1] :
y
x
1u
0u
20 1: [ , ]
(u) ( )
(u)
u u
u uαβ
→
⎡ ⎤→ = ⎢ ⎥
⎣ ⎦
p
p
( )0 1
0 1
The associated to the curve ( ) is the image of [ , ] according to ( ) :
[ , ] .
uu u u
u u
path pp
p

A. Piazzi Introduction to Dynamic Path Inversion
18
Geometric continuity of Cartesian paths
def.
( )0 1
0 1
0 1
A curve ( ), [ , ] is if1. ( ) [ , ]2. ( ) 0 [ , ]
u u u uP u u
u u u
∈
⋅ ∈
⋅ ≠ ∀ ∈
p regularpp
( )0 1
0 1
[ , ] is the set of piecewise-continuous functions over the domain [ , ].P u u
u u
A regular curve has a well-defined( ) ( )( )
uτ p uunit tangent vectorp u

A. Piazzi Introduction to Dynamic Path Inversion
19
Geometric continuity of Cartesian paths
The arc length function is
0
0 1 1
1 1
:[ , ] [0, ]
( ) ( )
( ) is the total curve length
u
u
f u u s
u f u s d
s f u
ξ ξ
→
→ ≡ = ∫ p
( )0 1
1
Given a regular curve ( ), ( ) [ , ] and it is bijective.
Hence, there exists the inverse :
u f C u u
f −
⋅ ∈p
11 0 1
1
:[0, ] [ , ]
( )
f s u u
s u f s
−
−
→
→ =

A. Piazzi Introduction to Dynamic Path Inversion
20
Geometric continuity of Cartesian paths
Attached to every point of a regular curve p(u) there is the orthonormal moving frame {τ(u), ν(u) } congruent to the axes of the {x, y }-plane.
x
yτν
osculating circle
( )0 1If ( ) [ , ] thenthe of ( ) is well-definedaccording to the Frenet
curvature
(
formula
( ) ( ), ( )
1 is the radius of the osculating circle( )
) cc
c
P u uu
d u u k u
k
k uds
u
τ ν
⋅ ∈
= ∈
pp

A. Piazzi Introduction to Dynamic Path Inversion
21
Geometric continuity of Cartesian paths
( )
0 1
3/ 22 2
The curvature function is :[ , ] , ( )
( )( ( ) ( ) (
( )) )
( )
c c
c
k u u u k u
u u u u
uk
uu α β α β
α β
→ →
−=
+
( )1
1
The curvature as a function of the arc length is:[0, ] ,
(
)
( ))
(
cs
s s s
k f s
κ
κ
κ−
→ →
=
( )0
( ) ( ) ( )u
cu
k u f u dκ κ ξ ξ⎛ ⎞
= = ⎜ ⎟⎜ ⎟⎝ ⎠∫ p

A. Piazzi Introduction to Dynamic Path Inversion
22
Geometric continuity of Cartesian paths
( )
( )
1
00 1
1. A curve ( ) has
and we say ( ) is a -curve if1. ( ) is regular;2. the unit tangent vector
-curves first order
is continuous alon
geometric continuity
g the curve: ( ) [ , ]
u
u Gu
G
C u uτ ⋅ ∈
def p
pp
( )
( )
2
1
0 1
2. A curve ( ) has
and we say ( ) is a -curve if1. ( ) is a -curve;2. ( ) [ , ] ;
3. the curvature is continuous along the cur
-curves second order g
ve
eometric continuity
: (c
u
u Gu G
P u
G
u
k
⋅ ∈
⋅
def p
ppp
( )( )
00 1
01
) [ , ]
or ( ) [0, ] .
C u u
C sκ
∈
⋅ ∈

A. Piazzi Introduction to Dynamic Path Inversion
23
Geometric continuity of Cartesian paths
( ) 0
1 2
00 1
- and -curves were introduced in computer graphics by (1983).
A curve ( ) [ , ] can be defined as a .-curve
G G
u C u u G∈
Barsky and Beattyp
Generalization to Gk-curves (Piazzi, Romano, Guarino 2003 ECC)
( )
( )
1
0 1
. A curve ( ) has
and we say ( ) is a -curve if1. ( ) is a -curve;2. ( ) [ , ] ;3. the ( 2)-nd order derivative wit
-curves; 2 -th order geometric
continuity
h respect
k
k
k
k
G u
u Gu G
D P u u
k
k
k
−
⋅ ∈
−
≥def p
pp
p
( )2 01
to the arc length of the curvature is continuous along the curve: ( ) [0, ] .kD C sκ− ⋅ ∈

A. Piazzi Introduction to Dynamic Path Inversion
24
Geometric continuity of Cartesian paths
( ).
A set of points of a Cartesian plane is a -path, i.e., a path with , if
-paths;
there e
0
- xith o sts rder geo a -curvewhose image is the given path
metric cont.
inuity
k
k
k
G k
kG
G
≥def
( )
2
0 1 0 1
Formally: is a -path if there existsa -curve ( ), [ , ] such that [ , ] .
k
k
GG u u u u u u
Γ ⊂
∈ = Γp p

A. Piazzi Introduction to Dynamic Path Inversion
25
References
• M. Fliess, J. Levine, Ph. Martin, P. Rouchon, “Flatness and defect of nonlinear systems: introductory theory and examples”, Int. J. Control, Vol. 61, No. 6, pp. 1327-1361, 1995.
• P. Rouchon, M. Fliess, J. Levine, Ph. Martin, , “Flatness, motion planning and trailer systems”, Proc. Conf. Decision and Control, pp. 2700-2705, 1993.
• P. Lucibello, G. Oriolo, “Stabilization via iterative state steering with application to chained-form systems”, Proc. Decision and Control, Vol. 3, pp. 2614-2619, 1996.
• P. Lucibello, G. Oriolo, “Robust stabilization via iterative state steering with an application to chained-form systems”, Automatica, Vol. 37, pp. 71-79, 2001.
• W.L. Nelson, “Continuous Steering-Function Control of robot carts”, Transactions on Industrial Electronics, Vol. 36, No. 3, pp. 330-337, 1989.
• J. Reuter, “Mobile robot trajectories with continuously diffirentiable curvature: an optimal control approach”, Proc.Int. Conf. Intelligent Robots and Systems, Victoria B.C. (Canada), October 1998.
• C. Altafini, “Following a Path of Varying Curvature as an Output Regulation Problem”, Transactions on Automatic Control, Vol. 47, No. 9, pp. 1551-1556, September 2002.
• A. Broggi, M. Bertozzi, A. Fascioli, C. Guarino Lo Bianco, and A. Piazzi, “The ARGO autonomous vehicle’s vision and control systems”, Int. J. of Intelligent Control and Systems, Vol. 3, No. 4, pp. 409-441, 1999.
• A. Piazzi, C. Guarino Lo Bianco, M. Bertozzi, A. Fascioli, and A. Broggi, “Quintic G^2-splines for the iterative steering of vision-based autonomous vehicles”, IEEE Transactions on Intelligent Transportation Systems, Vol. 3, No. 1, pp. 27-36, March 2002.
• L. Consolini, A. Piazzi, M. Tosques, “Path following of car-like vehicles using dynamic inversion”, Int. J. Control, Vol. 76, No. 17, pp. 1724–1738, November 2003.
• C. Guarino Lo Bianco, A. Piazzi, M. Romano, “Smooth motion generation for unicycle mobile robots via dynamic path inversion”, IEEE Transactions on Robotics, Vol. 20, No. 5, pp. 884—891, October 2004.
• C. Guarino Lo Bianco, A. Piazzi, M. Romano, “Smooth control of a wheeled omnidirectional robot”, Proc .IFAC 2004 Intelligent Autonomous Vehicles Conference, Lisboa, Portogal, 5-7 July 2004.
• L. Consolini, M. Tosques, “A controlled invariance problem for the VTOL aircraft with bounded internal dynamics”, Proc. Conf. Decision Control, December 2004.
• M. Tosques, L. Consolini, “A path-following problem for a class of non-linear uncertain system”, Proc. European Control Conf., September 2003.
• B.A. Barsky, J.C. Beatty, “Local control of bias and tension in beta-spline”, Computer Graphics, Vol. 17, No. 3, pp. 193–218, 1983.• A. Piazzi, M. Romano, C. Guarino Lo Bianco, “G3- splines for the path planning of wheeled mobile robots”, Proc. European Control Conf.,
September 2003.