Embed Size (px)
Citation preview

Introduction to 3+1 and BSSN
formalism
Yuichiro Sekiguchi (YITP)
July 28-August 3, 2011 1 APCTP International school on NR and GW

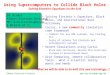
Overview of numerical relativity
Setting ‘realistic’ or ‘physically motivated’
initial conditions
Locating BH (solving AH finder )
Extracting GWs
Solving Einstein’s equations
Solving source filed equations
Solving gauge conditions
Main loop
BH excision
Solving the constraint equations
GR-HD GR-MHD GR-Rad(M)HD Microphysics • EOS
• weak processes
July 28-August 3, 2011 2 APCTP International school on NR and GW

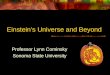
Scope of this lecture
Setting ‘realistic’ or ‘physically motivated’
initial conditions
Locating BH (solving AH finder )
Extracting GWs
Solving Einstein’s equations
Solving source filed equations
Solving gauge conditions
Main loop
BH excision
Solving the constraint equations
July 28-August 3, 2011 3 APCTP International school on NR and GW
GR-HD GR-MHD GR-Rad(M)HD Microphysics • EOS
• weak processes

The Goal
July 28-August 3, 2011 APCTP International school on NR and GW 4
The main goal that we are aiming at:
“To Derive Einstein’s equations in BSSN formalism”

Notation and Convention
July 28-August 3, 2011 APCTP International school on NR and GW 5
The signature of the metric: ( - + + + )
(We will use the abstract index notation)
e.g. Wald (1984); see also Penrose, R. and Rindler, W. Spinors and spacetime vol.1,
Cambridge Univ. Press (1987)
Geometrical unit c=G=1
symmetric and anti-symmetric notations
)(())(()
nnnn aaaaaaaa Tn
TTn
T ...]...[...)...( )sgn(!
1 ,
!
111
)(2
1 ),(
2
1][)( baababbaabab TTTTTT -+

Overview of numerical relativity
Setting ‘realistic’ or ‘physically motivated’
initial conditions
Locating BH (solving AH finder )
Extracting GWs
Solving Einstein’s equations
Solving source filed equations
Solving gauge conditions
Main loop
BH excision
Solving the constraint equations
GR-HD GR-MHD GR-Rad(M)HD Microphysics • EOS
• weak processes
July 28-August 3, 2011 6 APCTP International school on NR and GW

Solving Einstein’s equations on computers
July 28-August 3, 2011 APCTP International school on NR and GW 7
Einstein’s equations in full covariant form are a set of coupled partial differential equations The solution, metric g
ab, is not a dynamical object and
represents the full geometry of the spacetime just as the metric of a two-sphere does
To reveal the dynamical nature of Einstein’s equations, we must break the 4D covariance and exploit the special nature of time
One method is 3+1 decomposition in which spacetime manifold and its geometry (graviational fields) are divided into a sequence of ‘instants’ of time
Then, Einstein’s equations are posed as a Cauchy problem which can be solved numerically on computers

3+1 decomposition of spacetime manifold
Let us start to introduce foliation or slicing in the spacetime manifold M
Foliation {S } of M is a family of slices (spacelike hypersurfaces) which do not intersect each other and fill the whole of M
In a globally hyperbolic spacetime,
each S is a Cauchy surface which is
parameterized by a global time
function, t , as St
Foliation is characterized by the gradient one-form
July 28-August 3, 2011 8 APCTP International school on NR and GW
0 , ][ baaa t
taa

The lapse function
July 28-August 3, 2011 APCTP International school on NR and GW 9
The norm of a is related to a function called “lapse function”, a(xa) , as :
As we shall see later, the lapse function characterize the proper time between the slices
Also let us introduce the normalized one-form :
the negative sign is introduced so that the direction of n
corresponds to the direction to which t increases
na is the unit normal vector to S
2
1
a- ttgg ba
ab
ba
ab
1 , -- ba
ab
aa nngn a

The spatial metric of S : gab
July 28-August 3, 2011 APCTP International school on NR and GW 10
The spatial metric gab induced by gab onto S is defined by
Using this ‘induced’ metric, a tensor on M is decomposed
into two parts: components tangent and normal to S
The tangent-projection operator is defined as
The normal-projection operator is
Then, projection of a tensor into S is defined by
It is easy to check
baab
cd
bdacab
baabab
nnggg
nng
+
+
gg
g
b
aa
b
a
b nn+
a
b
a
ba
ba
b nn --
s
rs
s
r
rs
rdd
ccb
d
b
d
a
c
a
cbbaa
TT ......
......
1
11
1
1
11
1 ......
abcd
d
b
c
aab gg g

Covariant derivative associated with gab
July 28-August 3, 2011 APCTP International school on NR and GW 11
Covariant derivative acting on spatial tensors is defined by
The covariant derivative must satisfy the following conditions
It is a linear operator : (obviously holds from linearity of ∇)
Torsion free : DaDb f = DbDa f , (easy to check by direct calculation)
Compatible with the metric : Dc gab=0 , (easy to check also)
Leibnitz’s rule holds :
s
rs
s
r
r
s
r
s
r
ddcc
f
b
d
b
d
a
c
a
c
f
e
bbaa
ebbaa
e
T
TTD
......
......
......
1
11
1
1
1
1
1
1
1
......
0for
)(
)()(
)( )(
+
+++
+++
+
d
d
c
dc
d
d
adca
c
c
bd
d
ccb
dc
d
b
a
d
adca
c
c
b
d
c
d
cd
b
acb
c
d
c
d
db
a
c
b
d
cd
b
acb
c
d
db
ac
c
b
b
ac
c
a
wvvDwwDv
vwwvvDwwDv
vwwv
vwwvwvwvD

Intrinsic and extrinsic curvature for S
July 28-August 3, 2011 APCTP International school on NR and GW 12
The Riemann tensor for the slice S is defined by
An other curvature tensor, the extrinsic curvature for S is
defined by
extrinsic curvature provides information on how much the normal direction changes and hence, how S is curved
the antisymmetric part vanish due to Frobenius’s theorem : “For unit normal na to a slice ”
d
abcdcabba RvvDDDD )( -
S- tonormalunit : , )(
a
baab nnK
Sbx
bb xx +
)( ba xn)(
bba xxn +
parallel transported b
aba xKn -
0][ cba nn
][][ )(3 0 cbcba
a nnnn -

The other expressions of Kab
July 28-August 3, 2011 APCTP International school on NR and GW 13
First, note that
where ab is the acceleration of nb which is purely spatial
Because the extrinsic curvature is symmetric, we have
where L n is the Lie derivative with respect to n
Also, we simply have
Thus the extrinsic curvature is related to the “velocity” of the spatial metric gab
baabbaba
dc
d
b
d
b
c
a
c
adc
d
b
c
aba
anKann
nnn
---
++
))((
0)( b
ba
a
ba
ba
b
b nnnnnnan
abnbaabnbabaab nngannK g )()(2
1)(
2
1LL -+---
abnbaab gnK )(2
1L--

3+1 decomposition of 4D Riemann tensor
July 28-August 3, 2011 APCTP International school on NR and GW 14
Geometry of a slice S is described by gab and Kab gab and Kab represent the “instantaneous” gravitational fields in S
In order that the foliation {S} to “fits” the spacetime manifold, gab and Kab must satisfy certain conditions known as Gauss, Codazzi, and Ricci relations
They are related to 3+1 decomposition of Einstein’s equations
These equations are obtained by taking the projections of the 4D Riemann tensor
db
abcd
d
abcdabcd
nnR
nRR
4
4
4 , ,
abKabgabcdR
abcdR4abg

Gauss relation: spatial projection to S
July 28-August 3, 2011 APCTP International school on NR and GW 15
Let us calculate the spatial Riemann tensor
where we used (also note that n vanishes if n is uncontracted)
Then we obtain the Gauss relation
The contracted Gauss relations are
cd
d
ab
dd
baccba
d
bacd
d
cadbcba
cbacba
wnKwKKw
www
wwDD
--
++
))(( ))((
)(
)()()()( baab
dd
a
d
abba
dd
ba
d
ba anKnanKnnnnn +-+-+
bcadbdacabcdabcd
d
d
abcd
d
bacd
d
abcd
d
abccabba
KKKKRR
wKKwKKwRwRwDDDD
-+
+--
4
4 )(
b
cabacac
db
abcdac KKKKRnnRR -++ 44
ab
ab
ba
ab KKKRnnRR -++ 244 2

Codazzi relation : mixed projection to S and n
July 28-August 3, 2011 APCTP International school on NR and GW 16
Next, let us consider the “mixed” projection
where the right hand side is calculated as
Then we obtain the Codazzi relation
The contracted Codazzi relation is
)( 4
cabcbad
d
abc nnnR -
abcbca
bacbcacbbcacba
KaKD
naKDanKn
+-
----
)(
bcaacbd
d
abc KDKDnR - 4
b
aba
b
ab KDKDnR -4

Gauss and Codazzi relations
July 28-August 3, 2011 APCTP International school on NR and GW 17
Note that the Gauss and Codazzi relations depend only on the spatial metric gab, the extrinsic curvature Kab, and their spatial derivatives
This implies that the Gauss-Codazzi relations represent integrability conditions that gab and Kab must satisfy for any slice to be embedded in the spacetime manifold
The Gauss-Codazzi relations are directly associated with the constraint equations of Einstein’s equation

Ricci relation (1)
July 28-August 3, 2011 APCTP International school on NR and GW 18
Let us start from the following equation
The Lie derivative of Kac is
Then we obtain the Ricci relation
acacb
b
ca
b
abc
cb
b
aacacb
b
ca
b
a
b
abc
cb
b
aacacb
b
ca
b
abc
caacbcbbca
b
cabcba
bdb
abcd
aaKnaDKK
annaaKnaanKK
annaaKnanK
anKanKn
nnnnnR
+++-
++++--
++++
+++-
-
])([
][
)]()([
)( 4
b
acb
b
cabacb
bb
acb
b
cabacb
b
acn KKKKKnnKnKKnK --++ )( L
acca
b
cabacn
db
abcd aaaDKKKnnR +++
4 L

Ricci relation (2)
July 28-August 3, 2011 APCTP International school on NR and GW 19
Note that the Lie derivative of Kab
is purely spatial, as
Thus the Ricci relation is
0 +-++ c
bc
a
ab
c
abc
ac
bac
a
abc
ca
abn
a aKaKnKnnKnKnnKn L
acca
b
cabacn
db
abcd aaaDKKKnnR +++
4 L

Ricci relation (3)
July 28-August 3, 2011 APCTP International school on NR and GW 20
The acceleration ab is related to the lapse function a, as
where we have used the fact that is closed one-form
Then the Ricci relation can be written as
Furthermore, using the contracted Gauss relation
we obtain
aaa
aaa
ln lnln
)(22 ][][
bc
c
bcb
c
bccb
c
bc
c
bc
c
bc
c
b
Dnn
nnnnnna
+
---
aa
aaa
ca
b
cabacn
aaca
b
cabacn
db
abcd
DDKKK
DDDDKKKnnR
1
lnlnln
4
++
+++
L
L
b
cabacac
db
abcdac KKKKRnnRR -++ 44
b
cabacaccaacnac KKKKRDDKR 21
4 -++-- aa
L

“Evolution vector” and a na
July 28-August 3, 2011 APCTP International school on NR and GW 21
What is the natural “evolution” vector ?
As stated before, the foliation is characterized by the closed one-
form
Dual vectors ta to will be the evolution vector : ata =1
One simple candidate is ta=ana
Note that na is not the natural evolution vector because
This means that the Lie derivative with respect to na of a tensor
tangent to S is NOT a tensor tangent to S
On the other hand, and any tensor field tangent to S is Lie transported by ana to a tensor field tangent to S
0
))( )(
+-++-
b
a
a
b
a
b
a
bb
a
c
cc
b
a
c
a
c
c
b
a
bc
ca
bn
an
anKKnnnnnnL
0 a
bnaL

The shift vector
July 28-August 3, 2011 APCTP International school on NR and GW 22
We have a degree of freedom to add any spatial vector, called “shift vector”, b a to ana because ab a = 0
Therefore the general evolution vector is : ta=ana+b a
This freedom in the definition of the evolution time vector
stems from the general covariance of Einstein’s equations
It is convenient to rewrite the Ricci relation in terms of the Lie derivative of the evolution time vector, as
where we have used
b
cabacaccaactac KKKKRDDKR 21
)(1
4 -++--- aaa
bLL
ababnab
c
abc
c
bacabc
c
ababnabt KKKnKnKKnKKK )()( bbba aaaa LLLLLL +++++

3+1 decomposition of Einstein’s equations (1) - Decomposition of Tab
July 28-August 3, 2011 APCTP International school on NR and GW 23
Now we proceed 3+1 decomposition of Einstein’s equations
using the Gauss, Codazzi, and Ricci relations
To do it, let us decompose the stress-energy tensor as
where are the energy
density, momentum density/momentum flux, and stress tensor of the source field measured by the Eulerian observer
the trace is
We shall also use Einstein’s equations in the form of
abababab TRgRG 82
1 44 -
abbabaab SnPnEnT ++ )(2
ababab
b
aabba TSTnPTnnE - and ),( ,
EST -
- TgTR ababab
2
184

3+1 decomposition of Einstein’s equations (2) - Hamiltonian constraint
July 28-August 3, 2011 APCTP International school on NR and GW 24
We first project Einstein’s equation into the direction perpendicular to S to obtain
For the left-hand-side, we use the contracted Gauss relation
We finally obtain the Hamiltonian constraint
This is a single elliptic equation which must be satisfied everywhere on the slice
ERnnR ba
ab 82
1 44 +
ab
ab
ba
ab KKKRnnRR -++ 244 2
EKKKR ab
ab 162 -+

3+1 decomposition of Einstein’s equations (3) - Momentum constraint
July 28-August 3, 2011 APCTP International school on NR and GW 25
Similary, “mixed” projection of Einstein’s equations gives
Using the contracted Codazzi relation
We reach the momentum constraint
includes 3 elliptic equations
a
b
ab PnR 84 -
b
aba
b
ab KDKDnR -4
aa
b
ab PKDKD 8-

3+1 decomposition of Einstein’s equations (4) - Evolution equations
July 28-August 3, 2011 APCTP International school on NR and GW 26
The evolution part of Einstein’s equations is given by the full projection onto S of Einstein’s equations : Using a version of the Ricci relation
We obtain the evolution equation for Kab
The evolution equation for gab is given by an expression of Kab
--
++--+ )(
2
18)(
2
1)(
2
128 )(
4 ESSESnnESPnSR ababbaabbaabab gg
b
cabacaccaactac KKKKRDDKR 21
)(1
4 -++--- aaa
bLL
----++-- )(
2
18]2)( ESSKKKKRDDK abab
c
bacababbaabt gaaabLL
ababt K 2)( agb --LL

Summary of 3+1 decomposition
July 28-August 3, 2011 APCTP International school on NR and GW 27
Einstein’s equations are 3+1 decomposed as follows
3+1 decomposition of the stress-energy tensor
ba
ab
ba
ab nnTnnG 8
b
ab
b
ab nTnG 8
abab TG 8
EKKKR ab
ab 162 -+
aa
b
ab PKDKD 8-
( ))(24
]2)(
ESS
KKKKRDDK
abab
c
bacababbaabt
---
-++--
ga
aabLL
ababt K 2)( agb --LL
abbabaab SnPnEnT ++ )(2 ababab
b
aabba TSTnPTnnE - ),( ,
)( baab nK -
Gauss rel.
Codazzi rel.
Ricci rel.
Hamiltonian constraint
Momentum constraint
Evolution Eq. of Kab
Evolution Eq. of gab Definition of Kab

e
[ ]
4 4 ( )
0 * 0
ab a a a
b
ab
a bc a
F n J
F F
+
J
*
ab a b b a abc
c
ab a b b a abc
c
F n E n E B
F n B n B E
- +
- -
0, , 0a a a
a a aE n B n J n
(4 )ab a
a b an F n J
(4 )ab a
bF J
* 0ab
a bn F
* 0ab
b F
e4a
aD E
0a
aD B
( ) ( ) 4a abc a a
t b cE D B J KEb a a a - - +L
( ) ( )a abc a
t b cB D E KBb a a - - +L
Gauss’s law, No monopole no time derivatives of E, B
Constraint equations
Normal projection
Spatial projection
Faraday’s law, Ampere’s law
Evolution equations
Similarity with the Maxwell’s equations
July 28-August 3, 2011 28 APCTP International school on NR and GW

Evolution of constraints
July 28-August 3, 2011 APCTP International school on NR and GW 29
It can be shown that the “evolution” equations for the Hamiltonian (CH) and Momentum (CM) constraints becomes
Where Fij is the spatial projection : the evolution equation
The evolution equations for the constraints show that the constraints are “preserved” or “satisfied” , if They are satisfied initially (CH = CM = 0)
The evolution equation is solved correctly (Fab=0)
( )
( ) aaaaa
aaaa
b
b
i
H
ki
M
j
M
i
j
ij
j
i
Mt
ij
ij
Hk
k
M
k
MkHt
DHFCFDKCCKFDC
FKFCKDCCDC
)2()(2)(
)2()(
-+-+++--
+-+---
L
L
-- abababab TgTRF
2
18 4

Coordinate-basis vectors
July 28-August 3, 2011 APCTP International school on NR and GW 30
Let us choose the coordinate basis vectors
First, we choose the evolution timelike vector t a as the
time-basis vector :
The spatial basis vectors are chosen such that
The spatial basis vectors are Lie transported along t a :
( e i )a remains purely spatial because
( em )a constitute the commutable coordinate basis
Then
We define the dual basis vectors by
aa et )( 0
0)( a
ia e
0] ,[)()()( - a
i
a
b
b
i
a
ib
ba
it etteeteL
0)(2))( (
))(()())(())((
][ +
-
a
iab
ba
i
b
abab
b
a
iat
a
ita
a
iat
a
iat
etett
eeee LLLL
tt L
a
aa e )()( :)( mmm

Components of geometrical quantities (1)
July 28-August 3, 2011 APCTP International school on NR and GW 31
Now we have set the coordinate basis we proceed to calculate the components of geometrical quantities
Because the evolution time vector is the time-coordinate basis we have
From the property of the spatial basis, we have
Then, 0th contravariant components of spatial tensors vanish
From the definition of the time vector and normalization condition of na, we obtain
The normalization of na gives
] 0 0 0 1 [ )()( 0 m
m
m teett aaa
ii
a
iai nen )(0 ,0 a m
m
ijij
i
KK
0
0 0 ,
0
0 0 ], 0 [ mmm
ggbb
] [ iaaa nnt baaba
m -- -+
] 0 0 0 [ 1 am -- nnn a
a

Components of geometrical quantities (2)
July 28-August 3, 2011 APCTP International school on NR and GW 32
From the definition of spatial metric, we have
We here note that from the spatial component of the following equation, we have
This means that the indices of spatial tensors can be lowered and raised by the spatial metric
Then, from the inverse of gab, we obtain
-
--
--
--
jiiji
i
baabab gnngbbagba
baamg
2
ijijbaabab gnng gg -
i
jkj
ikngnngg ggg mm
mm
m ++ )(
))(( ,
22
2
dtdxdtdxdtdsg jjii
ij
iji
i
k
kbbga
gb
bbbam +++-
-
+

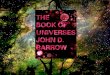
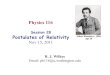
An intuitive interpretation
July 28-August 3, 2011 APCTP International school on NR and GW 33
an
ana
dtib
idx
at dtdx iib+
))(( 22 dtdxdtdxdtds jjii
ij bbga +++-
tS
dtt+S
The lapse function measures proper time between two adjacent slices
The shift vector gives relation of the spatial origin between slices

Conformal decomposition
July 28-August 3, 2011 APCTP International school on NR and GW 34
The importance of the conformal decomposition in the time evolution problem was first noted by York (PRL 26, 1656 (1971); PRL
28, 1082 (1972)) He showed that the two degrees of freedom of the gravitational
field are carried by the conformal equivalence classes of 3-metric, which are related each other by the conformal transformation :
In the initial data problems, the conformal decomposition is a powerful tool to solve the constraint equations, as studied by York and O’Murchadha (J. Math. Phys. 14, 456 (1973); PRD 10, 428 (1974)) (see for reviews , e.g., Cook, G.B., Living Rev. Rel. 3, 5 (2000); Pfeiffer, H. P. gr-qc/0412002)
In the following, we shall derive conformal decomposition of Einstein’s equations
ijij gg ~4

“Conformal” decomposition of Ricci tensor (1)
July 28-August 3, 2011 APCTP International school on NR and GW 35
The covariant derivative associated with the conformal metric is characterized by
The two covariant derivatives are related by (e.g. Wald )
where Cijk is a tensor defined by difference of Christoffel symbols
By a straightforward calculation, we can show (e.g Wald )
0~~abcD g
i
l
l
kj
l
j
i
kl
i
j
i
jk TCTCTDTD -+~
)ln~~lnln(2
)~~~
(2
1~
g
gggg
k
iji
k
jj
k
i
ijliljlji
klij
kij
kij
k
DDD
DDDC
-+
-+-
jl
kj
k
il
k
ij
l
lk
k
kji
k
ijk
j
ij
jl
kj
k
il
k
ij
l
lk
k
kji
k
ijk
j
jiij
j
jiij
j
ij
vCCCCCDCDvR
vCCCCCDCDvDDDDvDDDDvR
)~~
(~
)~~
()~~~~
()(
-+-+
-+-+--

“Conformal” decomposition of Ricci tensor (2)
July 28-August 3, 2011 APCTP International school on NR and GW 36
Thus the Ricci tensor is decomposed into two parts, one which is the Ricci tensor associated with the conformal metric and one which contains the conformal factor
More explicitly one can show (see e.g. Wald (1984))
Then, the Ricci scalar is decomposed as
g
g
ijij
k
kijji
k
kijjiijij
RR
DDDD
DDDDRR
+
-+
--
~
)ln~
)(ln~
(~4)ln~
)(ln~
(4
ln~~~2ln
~~2
~
k
k
k
k
k
k
DDR
DDDDRR~~
8~
))]ln~
)(ln~
(ln~~
(8~
[
--
-
-
+-

Conformal decomposition of extrinsic curvature
July 28-August 3, 2011 APCTP International school on NR and GW 37
The first step is to decompose Kij into trace (K) and traceless (Aij) parts as
Then, we perform the conformal decomposition of the traceless part as
Under these conformal decompositions of the spatial metric and the extrinsic curvature, let us consider the conformal decomposition of Einstein’s equation
KAKKAK ijijij
ijijij gg3
1 ,
3
1++
ijkl
jlikij
ijij AAAAA~
, ~ - gg

“Conformal” decomposition of the evolution equations (0) – an additional constraint
July 28-August 3, 2011 APCTP International school on NR and GW 38
In the following, with BSSN reformulation in mind, we set the determinant of the conformal metric to be unity:
with this setting, the conformal factor becomes
In the BSSN formulation, the conformal factor is defined by = ln so that = lng/12
In the case that we do not impose the above condition to the
background conformal metric, the equations derived in the following are modified slightly (for this, see Gourgoulhon, E.,
gr-qc/0703035)
1~det~ ijgg
g ln12
1ln

“Conformal” decomposition of the evolution equations (1) : the conformal factor
July 28-August 3, 2011 APCTP International school on NR and GW 39
Let us start from the evolution equation of the spatial metric g
ij :
Taking the trace of this equation, we have
Now we use an identity for any matrix A :
By setting gij = exp A and taking the Lie derivative, we obtain
Now we can derive the evolution equation for the conformal factor :
ababnabt K 2)( agg ab -- LLL
Kabn
ab 2agg a -L
]tr exp[]det[exp AA
ijn
ij
ijnijn gggggg aaa LLL ))(lntr ( )](lntr exp[
K
K
t
nnijn
ij
a
aggg
b
aaa
6
1ln)(
2ln12ln
--
-
LL
LLL

July 28-August 3, 2011 APCTP International school on NR and GW 40
Again, we start from the evolution equation for gij :
Substituting the decomposition of gij and Kij, we obtain
Now, we shall use the evolution equation for the conformal factor, and finally, we get
“Conformal” decomposition of the evolution equations (2) : the conformal metric
ababnabt K 2)( agg ab -- LLL
+--+-
+--+-
KA
KA
ijijtijijt
ijijtijijt
gagg
gagg
bb
bb
~
3
1~2ln)(~4~)(
~
3
1~2)(~4~)( 43
LLLL
LLLL
ijijt A~
2~)( agb --LL

July 28-August 3, 2011 APCTP International school on NR and GW 41
For the later purpose, let us derive the evolution equation for the inverse of the conformal metric
It is easily obtained from the evolution equation for the conformal metric, as
“Conformal” decomposition of the evolution equations (3) : the inverse conformal metric
ijij
t
ijjl
tkl
j
kt
ik
ij
klt
jlik
A
A
A
~2~)(
~2]~)(~)[(~
~2~)(~~
ag
aggg
aggg
b
bb
b
-
----
--
LL
LLLL
LL

July 28-August 3, 2011 APCTP International school on NR and GW 42
We start from the evolution equation for Kij :
We first simply take the trace of this equation
Here, let make use of the evolution equation for the inverse of the spatial metric,
then we obtain
Finally, using the Hamiltonian constraint, we obtain
“Conformal” decomposition of the evolution equations (4a) : the trace of the extrinsic curvature
)2)((4]2 ijij
k
jikijijjiijn SESKKKKRDDK --+-++- gaaaaL
)2)(3(4]22 SESKKKRDDKK ij
ij
i
i
ij
nijn --+-++-- aaagaa LL
abab
t K 2)( agb -LL
)3(4]2 ESKRDDK i
in -+++- aaaaL
)](4)( SEKKDDK ij
ij
i
it +++-- aabLL
EKKKR ab
ab 162 -+

July 28-August 3, 2011 APCTP International school on NR and GW 43
For convenience, let us express the right-hand-side in terms of the conformal quantities, as well as give a suggestion how to evaluate the derivative term :
“Conformal” decomposition of the evolution equations (4b) : the trace of the extrinsic curvature
( ) ( ) ( )agagagg
a j
jk
kj
jk
k
k
k
k
k DDDD -- ~1 2
22
3
1~~
3
1KAAKAAKK ij
ij
ij
ij
ij
ij ++

July 28-August 3, 2011 APCTP International school on NR and GW 44
We start from the Lie derivative of Kij :
Substituting the following equations into this yields
where TF denotes the trace free part : Tij
TF = Tij - (1/3)gij(trT)
The terms that involve K in the right-hand-side can be written as
“Conformal” decomposition of the evolution equations (5a) : the traceless part of the extrinsic curvature
)2)((4]2 ijij
k
jikijijjiijn SESKKKKRDDK --+-++- gaaaaL
ijnnijijnijn KKAK gg aaaa LLLL3
1
3
1++
)3(4]2 ESKRDDK i
in -+++- aaaaL ijijn K 2aga -L
--+-+- ij
k
jikij
TF
ijijjiijn KKKKKSRDDA gaaaa2TFTF
3
12
3
5)8()( L
---- k
jikij
k
jikijij
k
jikij AAAKAAKAKKKKK~~
2~
3
1 2
3
1
3
12
3
5 2 g

July 28-August 3, 2011 APCTP International school on NR and GW 45
We further proceed to decompose the left-hand-side :
Combining all of the result, we finally reach
We here note that the second-order covariant derivative of the lapse function may be calculated as
NOTE: there is the same 2nd order derivative in Rij
“Conformal” decomposition of the evolution equations (5b) : the traceless part of the extrinsic curvature
-+ ijijnnijijnijn AKAAAA
~
3
2~ln
~4
~ 44 a aaaa LLLL
k
jikij
TF
ijijjiijt AAAKSRDDA~~
2~
)8()(~
)(
TFTF4 -+-+-- - aaabLL
aggaaa
aaaa
lk
kl
ijjik
k
ijji
k
k
ijjijiji CDDDD
---
-
ln~~ln22~
~
)(

Let us turn now to consider the conformal decomposition of the constraint equations
Hamiltonian constraint
Momentum constraint
“Conformal” decomposition of the constraint
equations
July 28-August 3, 2011 APCTP International school on NR and GW 46
EKKKR ab
ab 162 -+
k
k DDRR~~
8~ -- -
3/~~ 2KAAKK ij
ij
ij
ij +
aaab
b PKDKD 8-
ln~~
6~~
ln~
10~
~
3/
j
ijij
j
j
ijij
ikj
jk
kji
jk
ij
j
ij
j
iij
j
ij
j
DAAD
DAAD
ACACADAD
KDADKD
+
+
++
+
-
0212
1~~~~~ 2
+-
+
-
EKAARDD ij
ij
i
i
ii
j
ijij
j PKDDAAD
-+ 8
~ln
~~6
~~

Summary of conformal decomposition
July 28-August 3, 2011 APCTP International school on NR and GW 47
With the conformal decomposition defined by
The 3+1 decomposition (ADM formulation) of Einstein’s equations becomes
0212
1~~~~~ 2
+-
+
-
EKAARDD ij
ij
i
i
ii
j
ijij
j PKDDAAD
-+ 8
~ln
~~6
~~
k
jikij
TF
ijijjiijt AAAKSRDDA~~
2~
)8()(~
)(
TFTF4 -+-+-- - aaabLL
)](4)( SEKKDDK ij
ij
i
it +++-- aabLL
ijijt A~
2~)( agb --LL
Kt ab6
1ln)( --LL
Constraint equations
Evolution equations
ijij gg ~4 KAK ijijij g3
14 + 1~det~ ijgg

Lie derivatives of tensor density
July 28-August 3, 2011 APCTP International school on NR and GW 48
A tensor density of weight w is a object which is a tensor times gw/2 :
One should be careful because the Lie derivative of a tensor density is different from that of a tensor, as
ij
w
ij T2/gT
k
k
aa
bbw
aa
bb
k
k
aa
bb
c
b
r
i
aa
bcb
a
c
s
i
aca
bb
aa
bbc
caa
bb
s
r
s
r
s
ri
s
r
is
r
s
r
s
r
w
w
b
bbbb
b
b
+
+
--
...
...0
...
...
...
...
1
...
.. ..
1
.. ..
...
...
...
...
...
1
1
1
1
1
1
1
1
1
1
1
1
1
1
TT
TTTTT
L
L
k
k
wi
j
k
j
i
k
i
k
k
j
i
jk
k
k
k
wi
j
k
j
i
k
i
k
k
jk
kwi
j
i
jk
k
k
k
wi
j
k
j
i
k
i
k
k
jk
kwi
j
i
jk
k
ij
ijwi
j
k
j
i
k
i
k
k
j
w
k
ki
j
i
j
w
k
k
wi
j
k
j
i
k
i
k
k
j
i
jk
kwi
j
wi
j
wT
wTwT
DwTwT
wTTT
wTTTTT
bgbbb
bgggbbgbgb
bgbbgbgb
ggggbbgbgb
ggbbbgg
b
bbb
++-
++--
++--
++--
++-
--
-
-
-
TTT
TTT
TTT
TT
T
)(
)2/()(
)2/()(
2/12/12/)1(
2/12/)1(
2/2/
2/2/
L
LLL

Lie derivatives in conformal decomposition
July 28-August 3, 2011 APCTP International school on NR and GW 49
The weight factor of the conformal factor = g1/12 is 1/6
Thus the weight factor of the conformal metric and the conformal extrinsic curvature is -2/3, so that
Note that the Lie derivative along t a is equivalent to the
partial derivative along the time direction
Thus ( ) k
kk
k
tt bbb ---6
1lnln)( LL
( ) k
kij
k
ijk
k
jikijk
k
tijt bgbgbggbgb +---- ~
3
2~~~~)( LL
( ) k
kij
k
ijk
k
jikijk
k
tijt AAAAA bbbbb +----~
3
2~~~~)( LL

Evolution of constraints
July 28-August 3, 2011 APCTP International school on NR and GW 50
It can be shown that the “evolution” equations for the Hamiltonian (CH) and Momentum (CM) constraints becomes
Where Fij is the spatial projection of the evolution equation
The evolution equations for the constraints show that the constraints are “preserved” or “satisfied” , if They are satisfied initially (CH = CM = 0)
The evolution equation is solved correctly (Fab=0)
( )
( ) aaaaa
aaaa
b
b
i
H
ki
M
j
M
i
j
ij
j
i
Mt
ij
ij
Hk
k
M
k
MkHt
DHFCFDKCCKFDC
FKFCKDCCDC
)2()(2)(
)2()(
-+-+++--
+-+---
L
L
-- abababab TgTRF
2
18 4

Numerical-relativity simulations based on
the 3+1 decomposition is unstable !!
July 28-August 3, 2011 APCTP International school on NR and GW 51
It is known that simulations based on the 3+1 decomposition (ADM formulation), unfortunately crash in a rather short time
This crucial limitation may be captured in terms of notions of hyperbolicity (e.g. see textbook by Alcubierre (2008) ) Consider the following first-order system The system is called
Strongly Hyperbolic ,if a matrix representation of A has real eigenvalues and complete set of eigenvectors
Weakly Hyperbolic , if A has real eigenvalues but not a complete set of eigenvectors
The key property of strongly and weakly hyperbolic systems : Strongly hyperbolic system is well-posed, and hence, the solution
for the finite-time evolution is bounded
Weakly hyperbolic system is ill-posed and the solution can be unbounded
0+ UAU i
i
t

Numerical-relativity simulations based on
the 3+1 decomposition is unstable !!
July 28-August 3, 2011 APCTP International school on NR and GW 52
It is known that the ADM formulation is only weakly hyperbolic ( Alcubierre (2008) )
Consequently, the ADM formulation is ill-posed and the numerical solution can be unbounded, leading to termination of the simulation
We need formulations for the Einstein’s equation which is (at least) strongly hyperbolic
Let us consider Maxwell’s equations in flat spacetime to capture what we should do to obtain a more stable system
kj
ijkit
i
kj
ijkit
i
i
e
i
i
EB
jBE
B
E
-
-
4
0
4kj
ijki
k
AB
AA
,
m )(
--
--
iiit
iij
j
j
j
iit
e
i
i
DEA
jADDADDE
E
4
4
Note the similarity of these equations to those in the ADM formulation

Consideration in Maxwell’s equations
July 28-August 3, 2011 APCTP International school on NR and GW 53
First of all, let us note the similarity of the Maxwell’s equations with the ADM equations (for simplicity in vacuum)
Second, the Maxwell’s equations are ‘almost’ wave equation
Recall that in the Coulomb gauge DjAj=0, the longitudinal part
(associated with divergence part) of the electric field E does not
obey a wave equation but is described by a Poisson equation
(see a standard textbook, e.g., Jakson)
--
-
iiit
ij
j
j
j
iit
i
i
DEA
ADDADDE
E eq.)t (constrain 0
( )
ijijn
ijlk
kl
ilkj
kl
kjil
kl
ijijn
K
RK
ag
gggggga
a
a
a
2
22
eqs.)t (constrain
-
+-+
+-
L
L wave-like part
“mixed-derivative” part
-+- tij
j
iik
k
it DADDADDA2

Reformulating Maxwell’s equations (1) - Introducing auxiliary variables
July 28-August 3, 2011 APCTP International school on NR and GW 54
A simple but viable approach is to introduce independent auxiliary variables to the system
Let us introduce a new independent variable defined by
The evolution equation for this is
Then, the Maxwell’s equations for the vector potential become a wave equation in the form :
k
k ADF
-- k
ki
i
k
k
tt DDEDADF
FDDADDA itiik
k
it ++- 2

July 28-August 3, 2011 APCTP International school on NR and GW 55
A second approach is to impose a good gauge condition
In the Lorenz gauge, the Maxwell’s equations in the flat spacetime are wave equations
Alternatively, by introducing a source function, one may “generalize” the Coulomb gauge condition so that Poisson-like equations do not appear
Recall again, that in the Coulomb gauge DjAj=0, the longitudinal
part (associated with divergence part) of the electric field E is
described by a Poisson-type equation
Reformulating Maxwell’s equations (2) - Imposing a better gauge
0 m
m A
)( mxHAD k
k

July 28-August 3, 2011 APCTP International school on NR and GW 56
A third approach is to use the constraint equations
To see this, let us back to the example considered in “introducing auxiliary variables”
The constraint equation can be used to rewrite the evolution equation for the auxiliary variable
Seen as the first-order system, the hyperbolic properties of the two system is different: the hyperbolicity could be changed !
It is important and sometimes even crucial to use the constraint equations to change the hyperbolic properties of the system
Reformulating Maxwell’s equations (3) - Using the constraint equations
--
--
--
k
ki
i
t
iiit
iik
k
iit
e
i
i
DDEDF
DEA
jADDFDE
ED
4
4
--
--
--
k
ket
iiit
iik
k
iit
e
i
i
DDF
DEA
jADDFDE
ED
4
4
4

Reformulating Einstein’s equations
July 28-August 3, 2011 APCTP International school on NR and GW 57
The lessons learned from the Maxwell’s equations are Introducing new, independent variables
BSSN ( Shibata & Nakamura PRD 52, 5428 (1995);
Baumgarte & Shapiro PRD 59, 024007 (1999) )
see also Nakamura et al. Prog. Theor. Phys. Suppl. 90, 1 (1987)
Kidder-Scheel-Teukolsky ( Kidder et al. PRD 64, 064017 (2001) )
Bona-Masso ( Bona et al. PRD 56, 3405 (1997) )
Nagy-Ortiz-Reula ( Nagy et al. PRD 70, 044012 (2004) )
Choosing a better gauge Generalized harmonic gauge ( Pretorius, CQG 22, 425 (2005) )
Z4 formalism ( Bona et al. PRD 67, 104005 (2003) )
Using the constraint equations to improve the hyperbolicity adjusted ADM/BSSN ( Shinkai & Yoneda, gr-qc/0209111 )
BSSN outperforms ( Alcubierre (2008) ) ! Exact reason is not clear

BSSN formalism (1)
July 28-August 3, 2011 APCTP International school on NR and GW 58
Let first analyze the conformal Ricci tensor
By noting that the conformal Ricci tensor is
If we divide the conformal metric formally as , we have
Thus we can eliminate the “mixed derivative” terms by introducing new auxiliary variable ( Shibata & Nakamura (1995) )
g~ln~
2 i
k
ik
( ) ) with terms(~~~~
2
1
~~~~~~~
gggggg +---
-+-
ikljjkliijlk
kl
l
kj
k
il
l
kl
k
ij
k
ikj
k
ijkijR
ijijij f+ g~
ijW
( ) ) with terms(~ ffW ki
k
jkj
k
iij
k
kij ++- ggg
ij
j
ijk
jk
iF gg ~~
( ) ) with terms(~ ffFFW ijjiij
k
kij ++- g

BSSN formalism (2)
July 28-August 3, 2011 APCTP International school on NR and GW 59
Baumgarte and Shapiro introduced the slightly different auxiliary variables
In this case, the mixed-second-derivative terms are encompassed as
In linear regime, SN and BS are equivalent
ij
j
i g~-
( ) ) with terms(~~~~
2
1~ gggggg +--- k
ijk
k
jikijlk
kl
ijR

BSSN formalism (3)
July 28-August 3, 2011 APCTP International school on NR and GW 60
Finally let us consider the evolution equation for the auxiliary variables (giving only a rough sketch of derivation) Let us start from the momentum constraint equation
Substituting the evolution equation for the conformal extrinsic curvature
We obtain the evolution equations for Fi and i, respectively
It can be seen from the above sketch of derivation, the evolution equation for i is slightly simpler
ii
j
ijij
j PKDDAAD
-+ 8
~ln
~~6
~~
ijij
t A~
2~)( agb -LL
iik
jk
ijij
jk
k PKDDAAD
-+ gg 8
~ln
~~~6)
~~(~
ijijt A~
2~)( agb --LL

BSSN formalism (4)
July 28-August 3, 2011 APCTP International school on NR and GW 61
The explicit forms of the evolution equations are
( )
-++)(+-+
-+-++--
l
lij
l
ijl
l
jilkijl
l
kkij
jk
ij
j
ijki
jkjk
kijijk
jk
iik
k
t
A
KAAAAfPF
bgbgbggba
ggaab
~
3
2~~)~(~
2
3
2ln
~6~~
2
1~~~216
( )
i
kj
jkk
kj
ijj
j
ii
j
ji
j
j
j
ij
j
ij
j
ijjki
jk
ii
k
k
t AKAAP
bgbgbbb
agaab
+++-+
-
-++--
~~
3
1
3
2
~2~
3
2ln
~6
~~216

BSSN formalism : summary (1)
July 28-August 3, 2011 APCTP International school on NR and GW 62
0212
1~~~~~ 2
+-
+
-
EKAARDD ij
ij
i
i
ii
j
ijij
j PKDDAAD
-+ 8
~ln
~~6
~~
( ) k
kij
k
ijk
k
jik
k
jikij
TF
ijijjiijk
k
t
AAA
AAAKSRDDA
bbb
aaab
-++
-+-+-- -
~
3
2~~
~~2
~)8()(
~
TFTF4
( ) )](4 SEKKDDK ij
ij
i
ik
k
t +++-- aab
( ) k
kij
k
ijk
k
jikijijk
k
t A bgbgbgagb -++-- ~
3
2~~~2~
( ) k
kk
k
t K bab +--6
1
6
1ln
Hamiltonian
constraint is used

July 28-August 3, 2011 APCTP International school on NR and GW 63
Momentum
constraint is used
( )
-++)(+-+
-+-++--
l
lij
l
ijl
l
jilkijl
l
kkij
jk
ij
j
ijki
jkjk
kijijk
jk
iik
k
t
A
KAAAAfPF
bgbgbggba
ggaab
~
3
2~~)~(~
2
3
2ln
~6~~
2
1~~~216
( )
i
kj
jkk
kj
ijj
j
ii
j
ji
j
j
j
ij
j
ij
j
ijjki
jk
ii
k
k
t AKAAP
bgbgbbb
agaab
+++-+
-
-++--
~~
3
1
3
2
~2~
3
2ln
~6
~~216
BSSN formalism : summary (2)

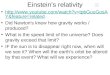
Overview of numerical relativity
Setting ‘realistic’ or ‘physically motivated’
initial conditions
Locating BH (solving AH finder )
Extracting GWs
Solving Einstein’s equations
Solving source filed equations
Solving gauge conditions
Main loop
BH excision
Solving the constraint equations
GR-HD GR-MHD GR-Rad(M)HD Microphysics • EOS
• weak processes
July 28-August 3, 2011 64 APCTP International school on NR and GW

Gauge conditions
July 28-August 3, 2011 APCTP International school on NR and GW 65
Associated directly with the general covariance in general relativity, there are degrees of freedom in choosing coordinates (gauge freedom) Slicing condition is a prescription of choosing the lapse function
Shift condition is that of choosing the shift vector
Einstein’s equations say nothing about how the gauge conditions should be imposed
As we have seen in the reformulation of the ADM system, choosing “good” gauge conditions are very important to achieve stable and robust numerical simulations An improper slicing conditions in a stellar-collapse problem will
lead to appearance of (coordinate and physical) singularities
Also, the shift vector is important in resolving the frame dragging
effect in simulations of e.g. compact binary merger

Preliminary – decomposition of covariant derivative of na –
July 28-August 3, 2011 APCTP International school on NR and GW 66
The covariant derivative of a timelike unit vector za can be decomposed as
Where, the deformation of the
congruence of the timelike vector
is characterized by these tensors
For the unit normal vector to S, na we have
The expansion is –K
The shear is –Aab
The twist vanishes
baabababba zhz -++3
1
ion)(accelerat ,
)(expansion ,
(shear) ,
(twist) ,
metric) (induced ,
TF
)(
][
a
c
ca
c
c
baab
baab
baabab
zz
z
z
z
zzgh
+
baababba anKAn --- g3
1

Geodesic slicing a=1, bi=0
July 28-August 3, 2011 APCTP International school on NR and GW 67
In the geodesic slicing, the evolution equation of the trace of the extrinsic curvature is
For normal matter (which satisfies the strong energy condition),
the right-hand-side is positive
Thus the expansion of time coordinate ( -K ) decreases monotonically in time
In terms of the volume element g1/2 , this means that the volume element goes to zero, as
This behavior results in a coordinate singularity
As can be seen in this example, how to impose a slicing condition is closely related to the trace of the extrinsic curvature
)+(+ SEKKK ij
ijt 34
KDK k
kijt
ij
t -+- 2
1ln baggg

Maximal slicing
July 28-August 3, 2011 APCTP International school on NR and GW 68
Because the decrease in time of the volume element results in a coordinate singularity, let us maximize the volume element
We take the volume of a 3D-domain S : and consider a variation along the time vector
At the boundary of S, we set a=1, b i=0
Thus if K=0 on a slice, the volume is extremal (maximal)
We shall demand that this maximal slicing condition holds for all slices and set
The maximal slicing has a strong singularity avoidance property (E.g. Estabrook & Wahlquist PRD 7, 2814 (1973); Smarr & York, PRD 17, 1945/2529 (1978) )
However this is a elliptic equation and is computationally expensive
S
xdSV 3][ gaaa nt ba +
-+-SS
i
it xdKKxdSV 33 )(][ gabggaL
)](4)(0 SEKKDDK ij
ij
i
it +++-- aabLL

(K-driver)/(approximate maximal) condition
July 28-August 3, 2011 APCTP International school on NR and GW 69
As a generalization of the maximal slicing condition, let us consider the following condition with a positive constant c
This (elliptic) condition drives K back to zero even when K
deviates from zero due to some error or insufficient convergence
Balakrishna et al. ( CQG 13, L135 (1996) ) and Shibata ( Prog. Theor.
Phys. 101, 251 (1999) ) converted this equation into a parabolic one by adding a “time” derivative of the lapse :
If a certain degree of the “convergence” is achieved and the lapse
relaxes to a “stationary state”, it suggests
This condition is called K-driver or approximate maximal slicing condition
cKKt -
cKKDSEKKDD i
iij
ij
i
i +-++- baaa )](4
cKKt -
( ) tcKKtt , a +-

Harmonic slicing
July 28-August 3, 2011 APCTP International school on NR and GW 70
The harmonic gauge condition have played an important role in theoretical developments (Choquet-Bruhat’s textbook)
Existence and uniqueness of the solution of the Cauchy problem of
Einstein’s equations (somewhat similar to Lorenz gauge in EM)
The harmonic slicing condition is defined by
Note that
The harmonic slicing condition can be written as
This is an evolution equation
It is known that the harmonic slicing condition has some singularity avoidance property, although weaker than that of the maximal slicing ( e.g. Cook & Scheel PRD 56, 4775 (1997), Alcubierre’s textbook )
0 ac
c x
( ) 0 0 - mm ggtc
c
ga- g
( ) Kk
kt
-- aab

Generalized harmonic slicing
July 28-August 3, 2011 APCTP International school on NR and GW 71
Bona et al. ( PRL 75, 600 (1995) ) generalized the harmonic slicing condition to
This family of slicing includes the geodesic slicing ( f=0 ), the
harmonic slicing ( f=1 ), and formally the maximal slicing ( f= )
The choice f(a)=2/a , which is called 1+log slicing , has stronger singularity avoidance properties than the harmonic slicing ( Anninos et al. PRD 52, 2059 (1995) )
The 1+log slicing has been widely used and has proven to be a
successful and robust slicing condition
( ) Kfk
kt )( aaab --

Minimal distortion (shift) condition
July 28-August 3, 2011 APCTP International school on NR and GW 72
Smarr and York (PRD 17, 1945/2529 (1978)) proposed a well motivated shift condition called the minimal distortion condition
As seen in the preliminary, the “distortion” part of the congruence is contained in the shear tensor
They define a distortion functional by and take a variation in terms of the shift
here the distortion tensor is defined by
The resulting shift condition is Beautiful and physical but vector elliptic equations (computationally
expensive)
TF
)(
TFTF ~
2
1 baababtab nK -S gL
SS 3dxI ab
ab g
0Sab
aD
+
+++ ab
ab
b
ab
ab
bb
ab
c
ca
ac
c PKDDAADRDDDD gaaabbb 1622

-Freezing and
approximate minimal condition
July 28-August 3, 2011 APCTP International school on NR and GW 73
With some calculations, one can show that the minimal distortion condition is written as The conformal factor is coupled !
Modifications of the minimal distortion condition are proposed by Nakamura et al. (Prog. Theor. Phys. Suppl. 128, 183 (1997)) and Shibata (Prog. Theor. Phys. 101, 1199 (1999))
E.g., Nakamura et al. proposed instead to solve the decoupled pseudo-
minimal distortion condition :
Alcubierre and Brugmann (PRD 63, 104006 (2001)) proposed an approximate minimal distortion condition called Gamma-Freezing :
Anyway, these conditions are elliptic-type !
0)~(~
ijt
jD g
0)~(~
ijt
jD g
0)~(~
i
t
ij
tjD g

-Driver condition
July 28-August 3, 2011 APCTP International school on NR and GW 74
Alcubierre and Brugmann (PRD 63, 104006 (2001)) converted the -freezing elliptic condition into a parabolic one by adding a time derivative of the shift (somewhat similar to the K-driver)
Alcubierre et al. (PRD 67, 084023 (2003)) and others (Lindblom & Scheel
PRD 67, 124005 (2003); Bona et al. PRD 72, 104009 (2005)) extended the -freezing condition to hyperbolic conditions
There are several alternative conditions
Shibata (ApJ 595, 992 (2003)) proposed a hyperbolic shift condition
To date, the above two families of shift conditions are known to be robust
i
tt k b
ii
t
i
t
ii
t
BB
kB
b
-
( ) simulationin used step- time: ,~stepstep tFtF iti
iji
t + gb

Overview of numerical relativity
Setting ‘realistic’ or ‘physically motivated’
initial conditions
Locating BH (solving AH finder )
Extracting GWs
Solving Einstein’s equations
Solving source filed equations
Solving gauge conditions
Main loop
BH excision
Solving the constraint equations
GR-HD GR-MHD GR-Rad(M)HD Microphysics • EOS
• weak processes
July 28-August 3, 2011 75 APCTP International school on NR and GW

3+1 decomposition of - Energy Conservation Equation (1)
July 28-August 3, 2011 APCTP International school on NR and GW 76
First, substitute the 3+1 decomposition of Tab to obtain
Then, let us project it onto normal direction to S.
Noting that Pa, Kab, and ab is purely spatial, we obtain
Because naSab=0, we have
Similarly,
The divergence term of Pa is
0 ab
aT
b
abaab
bb
baba
b
aab
b
a
b
a
b
aa
b
a
b
b
b
ab
SKPPnPnKPKEnEaEnn
SnPnPnEnT
+-++--+
+++
)(0
0++-+- b
ab
a
ab
baa
ab
b SnPnnPKEEn
ab
aba
b
a
b
b
a
a
b
b
a
b
ab
a KSanKSnSSn +- )(
b
b
a
b
b
aab
ba aPnnPPnn --
a
a
a
a
a
b
b
a
b
a
a
b
b
a
a
a aPPPnnPPD -+ )(

July 28-August 3, 2011 APCTP International school on NR and GW 77
Combining altogether, we reach the energy conservation equation
where we have used
The last equation will be used to derive the conservative forms
of the energy equation
3+1 decomposition of - Energy Conservation Equation (2)
0 ab
aT
0)()(
02])(
02
+--+-+
+--+-
--++
aaabba
aab
b
bab
ab
k
k
kk
kt
b
bab
ab
b
bk
k
t
ab
abb
bb
bb
b
DPSKKDEEPDE
DPSKKEPDED
SKKEaPPDEn
EDEEEn k
k
ttnb
b )() baa b -- --L(LL
aln bb Da

July 28-August 3, 2011 APCTP International school on NR and GW 78
To this turn, let us project the equation onto S to obtain
The spacetime-divergence term of Sbc can be replaced by
the spatial-divergence by
The projection term with the covariant derivative of Pc is
Note that (an)-Lie derivative of any spatial tensor is spatial, and
so that
3+1 decomposition of - Momentum Conservation Equation (1)
0 ab
aT
0+-+- b
cb
c
aacb
bc
aba
b
a SKPPnKPEa
d
d
c
b
eb
e
c
b
ed
d
b
d
b
e
c
b
ed
e
c
d
b
b
cb aSSSnnSSD -+ )(
))(()( 11 d
cdcn
c
acb
bc
acb
bc
a nPPPnPn aaaa a - --L
)+(-+ a
b
a
bb
aa
bb
aa
b anKnnnn aaaaa )(
b
abancb
bc
a PKPPn + -
aa L

July 28-August 3, 2011 APCTP International school on NR and GW 79
Combining altogether, we obtain the momentum conservation equation :
Where we have expressed the Lie derivative by spatial covariant derivative
The last equation will be used in conservative reformulation
NOTE: In York (1979), because he used Pa instead of Pa, a extra
term appear in the equation.
3+1 decomposition of - Momentum Conservation Equation (2)
0 ab
aT
0)()(
0)()(
0][)(
0][)(
+--+-+
++-++-
++-+-
+-++-
ababba
aaabab
aaa
a
b
b
a
c
aca
c
cc
cc
acat
ab
b
aa
c
c
b
abac
c
t
ab
b
aa
b
abat
aab
b
a
b
abat
EDDPPKDPSDP
EDDSPKDSDPD
EDDSKPSDP
EaKPaSSDP
L
LL

July 28-August 3, 2011 APCTP International school on NR and GW 80
Now we will show the energy and momentum conservation equations can be recast to conservative form
First, by taking the trace of evolution eq. of gab, we get
Second, note that for any rank-(1,1) spatial tensor,
3+1 decomposition of - Conservative Formulation (1)
0 ab
aT
0)()(
0)()(
+--+-+
+--+-+
ababba
aaabba
a
c
aca
c
ca
cc
acat
b
bab
ab
c
c
cc
ct
EDDPPKDPSDP
DPSKEKDEPDE
gg
ggababbgg tijt
ija
aabbaabt
ab KDKDD ----1
2
1 2)(
( ) k
j
j
ik
k
ik
k
j
j
ik
j
ij
k
ik
k
j
j
ik
j
i
k
jk
k
ik
k
ik
TT
TTTTTTTD
1
)ln(
-
-+-+
gg
g

July 28-August 3, 2011 APCTP International school on NR and GW 81
Using the equations derived the above, we can finally reach the conservative forms of the energy and momentum equations
For the perfect fluid, for instance, these equations may be solved by high resolution shock capturing schemes
3+1 decomposition of - Conservative Formulation (2)
0 ab
aT
( ) ( )( ) ( ) )()(
)()(
k
jj
k
k
iji
k
iki
kk
ikit
k
kij
ij
kk
kt
PSEDDPPSP
DPSKEPE
baabgbagg
aagbagg
-+--+
--+

Overview of numerical relativity
Setting ‘realistic’ or ‘physically motivated’
initial conditions
Locating BH (solving AH finder )
Extracting GWs
Solving Einstein’s equations
Solving source filed equations
Solving gauge conditions
Main loop
BH excision
Solving the constraint equations
GR-HD GR-MHD GR-Rad(M)HD Microphysics • EOS
• weak processes
July 28-August 3, 2011 82 APCTP International school on NR and GW

Locating the apparent horizon (1)
July 28-August 3, 2011 APCTP International school on NR and GW 83
Apparent horizon (e.g. Wald (1984)): the apparent horizon is the boundary of the (total) trapped region
Trapped region: the trapped region is collections of points where the
expansion of the null geodesics is negative or zero
Thus, to locate the apparent horizon, we must calculate the expansion of the null geodesics and determine the points where the expansion vanishes
Recall that the expansion is related to the trace of the extrinsic curvature : K expansion
So that let us first define the extrinsic curvature of a null surface N generated by an outgoing null vector on a slice S:

Locating the apparent horizon (2)
July 28-August 3, 2011 APCTP International school on NR and GW 84
Let S to be an intersection of the slice S and the null surface N We denote the unit normal of S in S, as sa
Then the outgoing ( ka ) and ingoing ( la ) null vectors on S are
Using ka and la , the metric on S induced by gab is given by Thus we can define the projection operator to S :
( ) ( )aaaaaa snlsnk -+2
1 ,
2
1
babaab
abbaabab
ssnng
lklkg
-+
++
b
a
b
aa
b
a
b ssnnP -+

Locating the apparent horizon (3)
July 28-August 3, 2011 APCTP International school on NR and GW 85
Using the projection operator, the extrinsic curvature for N is defined by
Because ka is the outgoing null vector on S, the 2D-surface S
is the apparent horizon if tr[k] = kaa = k = 0
This condition can be written in terms of sa as
This is a single equation for the three unknown “functions” sk !
However, the condition that S is closed 2-sphere and that sa is a unit normal vector bring two additional relation to sk
For detail, see ( e.g. Bowen, J. M. & York, J. W., PRD 21, 2047 (1980);
Gundlach, C. PRD 57, 863 (1998) )
)( dc
d
b
c
aab kPP -k
0+- ji
ij
k
k ssKKsD

Energy and Momentums
July 28-August 3, 2011 APCTP International school on NR and GW 86

Canonical formulation (1)
July 28-August 3, 2011 APCTP International school on NR and GW 87
The Lagrangian density of gravitational field in General Relativity is (e.g. Wald (1984))
Because the 4D Ricci scalar is written as
Noting that the extrinsic curvature is
The conjugate momentum ab is defined by
RgG
4-L
) termsDivergence ( )(
)(2
2
44
+-+
-
KKKR
nnRnnGR
ab
ab
ba
ab
ba
ab
ga
)(2
1 a
b
b
aabab DDK bbga
--
)( abab
ab
Gab KK ggg
-
L

Canonical Formulation (2)
July 28-August 3, 2011 APCTP International school on NR and GW 88
Now we obtain the Hamiltonian density as
The Hamiltonian is defined by
The constraint equations are derived by taking the variations with
respect to the lapse and the shift, respectively, as
where we have dropped the surface term
( ) ( ) termsDivergence 22
1 +
-
-+-
-
- ab
abab
ab
Gab
ab
G
DR gbgg
ag
g LH
3dxH GG H
( ) constraint Momentum : 0
constraintn Hamiltonia : 02
1
2/1
-+-
-
--
ab
a
b
M
ab
abH
DC
RC
g
gg

Canonical Formulation (3)
July 28-August 3, 2011 APCTP International school on NR and GW 89
The evolution equations are derived by taking the variations with respect to the canonical variables (e.g. Wald (1984)) :
again, we here dropped the divergence terms
( ) ( ) abb
c
acabc
c
c
c
abba
abb
c
ac
cd
cdababGab
abbaababab
Gab
ADDDDDD
RRH
BDH
-+-+
--
-+
--
+
-
-
--
-
2
2
12
2
1
2
1
2
1
22
12
)(2/1
2/122/1
)(
2/1
bbggagag
aggaggagg
bgag
g
ab

Energy for Asymptotically Flat spacetime (1)
July 28-August 3, 2011 APCTP International school on NR and GW 90
Let us consider the energy of gravitational field in the asymptotically flat spacetime Although there is no unique definition of ‘local’ gravitational
energy in General Relativity, we can consider the total energy in the asymptotically flat spacetime
Asymptotically flat spacetime represent ideally isolated spacetime, and hence, there will be the conserved energy
A simple consideration based on the Hamiltonian density,
may lead to a conclusion that the energy of any spacetime is zero when the constraint equations are satisfied !
This “contradiction” stems from the wrong treatment of the divergence (surface) terms (which we have dropped)
( ) termsDivergence 2 +- b
MbHG CC bagH

Energy for Asymptotically Flat spacetime (2)
July 28-August 3, 2011 APCTP International school on NR and GW 91
The boundary conditions to be imposed are not fixed ones Q|boundary = 0 where Q denotes relevant geometrical variables, but the “asymptotic flatness” :
Keeping the divergence terms, the variation of the Hamiltonian now becomes (Regge & Teitelboim, Ann. Phys 88. 286 (1974))
where we have assumed that the constraint equations and the evolution equations are satisfied, dl is the volume element of the
boundary sphere and Mijkl is defined as
)( ),( ),( ),(1 2111 ---- -+ rOrOrOrO ij
ijij
i gba
-+-
--
ljk
jkljlkkl
k
lijkijk
ijkl
G
d
dDDMH
gbbb
gaga
)2(2
)()(
klijjkiljlikijklM ggggggg 22
1-+

Energy for Asymptotically Flat spacetime (3)
July 28-August 3, 2011 APCTP International school on NR and GW 92
Under the boundary conditions of the asymptotic flatness, the non-zero contribution of the surface terms is,
Thus, we define the Hamiltonian of the asymptotically flat spacetime as
Then, the energy of the gravitational fields is not zero but E[gij]
The overall factor is determined by the requirement that the energy of an asymptotically flat spacetime is M
( ) --- lijkikj
klij
lijk
ijkl ddDM gggggg )(
( ) -
+
lijkikj
klij
ijG
ijGGG
dE
EHH
ggggg
g
g
16
1][
][16
tasympt.fla
jiji
ij dxdxr
xMxdt
r
Mds
++
--
3
2222
1

Momentums for Asymptotically Flat spacetime (1)
July 28-August 3, 2011 APCTP International school on NR and GW 93
The action for the region V (t1<t<t2) is
Taking the variation, we obtain (Regge & Teitelboim, Ann. Phys 88. 286 (1974))
When there is a Killing vector a , the action is invariant under the Lie transport by a
Making use of , we obtain
Note that the second term in the integrand vanished thanks to the
momentum constraint
- Gij
ijt
tVGG xddtdxS HL g 34 2
1
EOMby vanishingterms32
1 + ij
ijt
tG xd
dt
ddtS g
)( ijjiijij DD gg +-- L
( ) 02232
1
+- ij
jij
ij
i
t
tG DDxd
dt
ddtS

July 28-August 3, 2011 APCTP International school on NR and GW 94
Finally the variation of the action is reduced to
Because the Killing vector approaches at the boundary (spacelike
infinity) to a constant translation vector field ta , we have
This equation means that PGk represent the total linear momentum
Similarly, the generator of the rotational Lie transport approaches ijk j j xk (j is a constant vector field, is the totally anti-symetric tensor) , we may define the total angular momentum by
Momentums for Asymptotically Flat spacetime (2)
( ) 022
1
-
t
tk
kl
lG dS
-- kl
lij
k
G
k
G
k
Gk dPtPtP
gt8
1][ ,0)()( 12
- kjl
ijklij
G
k
G
k
G
k
k xdLtLtL
gj8
1][ ,0)()( 12

To summarize, we define the energy, the linear momentum, and the angular momentum in the asymptotically flat spacetime by
A number of examples of the actual calculation will be found in a textbook (Baumgarte & Shapiro (2010))
Energy and Momentums : summary
July 28-August 3, 2011 APCTP International school on NR and GW 95
( ) - lijkikj
klij
ijG dE ggggg
g
16
1][
- kl
lij
k
G dP
g8
1][
kjl
ijklij
G
k xdL
g8
1][

Overview of numerical relativity
Setting ‘realistic’ or ‘physically motivated’
initial conditions
Locating BH (solving AH finder )
Extracting GWs
Solving Einstein’s equations
Solving source filed equations
Solving gauge conditions
Main loop
BH excision
Solving the constraint equations
GR-HD GR-MHD GR-Rad(M)HD Microphysics • EOS
• weak processes
July 28-August 3, 2011 96 APCTP International school on NR and GW

References
July 28-August 3, 2011 APCTP International school on NR and GW 97
General Reference on General Relativity
Wald R. M., General Relativiy, Chicago University Press (1984)
The classics on the basis of Numerical Relativity
Arnowitt R., Deser S., & Misner C. W., The Dynamics of General Relativity,
in Gravitation, ed. L. Witten, Wiley (1962), (Gen. Rel. Grav. 40, 1997 (2008))
York J. W., Kinematics and dynamics of general relativity,
in Sources of Gravitational Radiation, ed. L. Smarr,
Cambridge University Press (1979)

References
July 28-August 3, 2011 APCTP International school on NR and GW 98
Recent Textbooks on Numerical Relativity
Baumgarte T. & Shapiro S. L., Numerical Relativity.
Cambridge University Press (2010)
Results of Numerical Relativity Simulations
Alcubierre M., Intrduction to 3+1 Numerical Relativity,
Oxford University Press (2008)
Boundary Conditions
Gourgoulhon E., 3+1 Formalism and Bases of Numerical Relativity,
to be published in Lecture Notes in Physics, (gr-qc/0703035)
Einstein’s equations as the Cauchy Problem
Choquet-Bruhat Y., General Relativity and Einstein Equations,
Oxford University Press (2009)

References
July 28-August 3, 2011 APCTP International school on NR and GW 99
Locating the Horizons
Thornburg, J. , Event and Apparent Horizon Finders for 3+1 Numerical
Relativity, Living Rev. Relativ. 10, 3 (2007)
ADM mass, and Some useful calculations
Poisson E. , A Relativist’s Toolkit, Cambridge University Press (2004)
Initial Data Problems
Cook, G. B. , Initial Data for Numerical Relativity,
Living Rev. Relativ. 3, 5 (2000)
Pfeiffer, H. P. , Initial value problem in numerical relativity, gr-qc/0412002

References
July 28-August 3, 2011 APCTP International school on NR and GW 100
General Relativistic Numerical Hydrodynamics
Font, J. A. , Numerical Hydrodynamics and Magnetohydrodynamics in General
Relativity, Living Rev. Relativ. 11, 7 (2008)
Marti, J. M. & Muller, E. , Numerical Hydrodynamics in Special Relativity,
Living Rev. Relativ. 6, 7(2003)
Toro, E. F. , Riemann Solvers and Numerical Methods for Fluid Dynamics:
A Practical Introduction , Springer (2009)
Extracting Gravitational Waves
Reisswig, C., Ott, C. D., Sperhake, & U. & Schnetter, E. ,
Gravitational wave extraction in simulations of rotating stellar core collapse,
Phys. Rev. D 83, 064008 (2011)