-
EXPLICIT POLYNOMIAL PRESERVING TRACE LIFTINGS
ON A TRIANGLE
MARK AINSWORTH AND LESZEK DEMKOWICZ
Abstract. We give an explicit formula for a right inverse of the
traceoperator from the Sobolev space H1(T ) on a triangle T to the
trace space
H1/2(∂T ) on the boundary. The lifting preserves polynomials in
thesense that if the boundary data are piecewise polynomial of
degree N ,then the lifting is a polynomial of total degree at most
N and the liftingis shown to be uniformly stable independently of
the polynomial order.Moreover, the same operator is shown to
provide a uniformly stablelifting from L2(∂T ) to H
1/2(T ). Finally, the lifting is used to constructa uniformly
bounded right inverse for the normal trace operator fromthe space
H(div; T ) to H−1/2(∂T ) which also preserves
polynomials.Applications to the analysis of high order numerical
methods for partialdifferential equations are indicated.
1. Introduction
Let T denote a triangle and let F ∈ H1/2(∂T ) be given boundary
data.We say that EF is a stable, polynomial preserving trace
lifting of F pro-vided that the trace of EF on the boundary ∂T
coincides with F ; if F isa polynomial of degree N , then EF is a
polynomial of total degree at mostN ; and, there exists a positive
constant C (independent of F ) such that
‖EF‖H1(T ) ≤ C‖F‖H1/2(∂T ). Here, H1(T ) and H1/2(∂T ) denote
the usualSobolev spaces [1, 21].
The existence of polynomial trace liftings is of fundamental
importancein the design and analysis of high order numerical
methods for partial differ-ential equations. The paper of Babuška
and Suri [4] is ostensibly concernedwith the convergence analysis
of high order finite element methods for secondorder elliptic
problems, but contains a key result establishing the existenceof
polynomial extensions which plays a vital role in the analysis and
ap-propriate treatment of the non-homogeneous essential boundary
data. A
function F defined on the real line may be extended to a
function F̃ de-fined on the upper half plane in a bounded fashion
using a convolution, oraveraging, type operator
F 7→ F̃ : (x, y) → 12
∫
R
χI(s) F (x + sy) ds =1
2y
∫ x+y
x−yF (s) ds (1)
1991 Mathematics Subject Classification. 46E35, 47B35 (65N55,
65N35).Key words and phrases. Trace lifting. Polynomial extension.
Polynomial lifting. Do-
main decomposition. p-version finite element method. Spectral
element method.Partial support of M.A. from the Leverhulme Trust
through a Leverhulme Trust Fel-
lowship and the Institute for Computational Engineering and
Sciences at the University ofTexas at Austin is gratefully
acknowledged. The work of the second author was supportedby Air
Force Contract F49620-98-1-0255 .
1
-
2 MARK AINSWORTH AND LESZEK DEMKOWICZ
where χI denotes the characteristic function for the interval I
= (−1, 1).Operators of the form (1) and the study of trace and
extension theorems haveenjoyed a close relationship (see, for
instance, Gagliardo [15] and Lions [18]and the references
therein).
The polynomial extension result of Babuška and Suri [4] uses a
successionof applications of the operator (1) applied to carefully
crafted choices of thedata F to construct a polynomial lifting on a
triangle and a square. Asimilar procedure was subsequently used in
the more widely cited work ofBabuška et. al. [3] and applied to
the analysis of domain decompositionpreconditioning techniques for
high order finite element methods.
Maday [20] shows that the lifting defined in [4] provides stable
polyno-mial liftings in weighted Sobolev spaces on a triangle or a
square. Theseresults are then used in the study Hilbertian
interpolation between poly-nomial subspaces of the weighted Sobolev
spaces, which are of importancein the analysis of spectral type
methods for partial differential equations.Subsequently, polynomial
liftings in weighted Sobolev spaces on a squarewere studied by
Bernardi and Maday [9] and used to derive improved errorestimates
for the accuracy of the pressure in spectral collocation methodsfor
the approximation of Stokes’ equations. Polynomial liftings onto
higherorder Sobolev spaces are treated by Bernardi, Dauge and Maday
[7] capital-ising on the earlier approach in [4, 20]. Polynomial
liftings on a tetrahedronwere developed by Muñoz-Sola [22]
following an idea mentioned in [20], andused to derive convergence
estimates for high order finite element schemesfor second order
elliptic problems in three dimensions, while the case of acube is
studied by Ben Belgacem [5].
The importance of polynomial liftings in the development and
analysisof domain decomposition algorithms lies in their close
relationship with dis-crete harmonic extensions [11, 14]. These
algorithms rely, either directly orindirectly, on minimising the
coupling between basis functions associatedwith the interfaces and
the interior functions associated with the subdo-mains themselves.
Indeed, minimising this coupling is often the decisivestep in
developing effective preconditioning techniques but generally
comesat a high cost in terms of complexity. This begs the question
of whether itmight be possible to construct basis functions
associated with the interfacesthat a priori have (nearly) minimal
coupling with the interior degrees offreedom?
In principle, one could use any of the polynomial liftings
described earlierto define suitable basis functions to minimise the
coupling with interior func-tions. Unfortunately, those
constructions are based on a sequence of liftingsof the type (1) as
in Babuška and Suri [4], and as such do not lend them-selves to
efficient practical implementation. The question naturally arisesof
whether it is possible to replace the sequence of successive
applicationsof extension (1) by a one-step extension consisting of
three simultaneousapplications.
The rule
EMSF (x, y) =
(1 − x − y√
3
) (1 + x − y√
3
) √3
2y
∫ x+y/√3
x−y/√
3
F (s)
1 − s2 ds, (2)
-
EXPLICIT TRACE LIFTINGS 3
suggested in [20], constitutes a one-step extension of data
supported on asingle edge, and may be shown to be uniformly bounded
using argumentssimilar to those found in [22]. Unfortunately, this
operator does not readilygeneralise to give a one-step extension
for more general data, although itmay be used sequentially to
construct a stable trace lifting.
A one-step extension formula that is applicable to general data,
if feasi-ble, is attractive not only in the practical construction
of basis functions butalso theoretically (we show how it may used
to derive liftings in H(div;T )).Unfortunately, the data for each
of the three independent extension fromthe individual edges of the
triangle must be judiciously chosen in order thatthe combined
effect is to produce a stable lifting of the original data.
Thisleads to a coupled system of three integral equations
determining the ad-missible choices of data. Furthermore, the
system has non-trivial kernelcorresponding to non-uniqueness in the
admissible choices of boundary datafor the one-step extension.
Together, these features frustrate attempts toderive explicit,
closed-form solutions. Nevertheless, by exploiting
rotationalsymmetry properties of the triangle, we are able to
decouple the systeminto three scalar integral equations involving
the cube roots of unity. Ananalysis of the scalar integral
equations reveals (as expected) non-trivial ker-nels, and in
addition, that solvability requires the data satisfy
appropriatecompatibility conditions. We exhibit explicit solutions
of the equations andestablish continuous dependence with respect to
certain subspaces of theSobolev space H1/2. Interpreting these
results in the context of the originalcoupled system, we exhibit
closed form solutions, show that the compatibil-ity conditions are
automatically satisfied and deduce continuous dependencein natural
norms.
These results are then used to give an explicit formula for a
right inverse ofthe trace operator from the Sobolev space H1(T ) on
a triangle T to the trace
space H1/2(∂T ) on the boundary. The lifting preserves
polynomials in thesense that if the boundary data are piecewise
polynomial of degree N , thenthe lifting is a polynomial of total
degree at most N and the lifting is shownto be uniformly stable
independently of the polynomial order. Moreover, thesame operator
is shown to provide a uniformly stable lifting from L2(∂T )
to H1/2(T )—a result that is of importance in the analysis of
high orderboundary element methods [2]. Finally, the lifting is
used to construct auniformly bounded right inverse for the normal
trace operator from thespace H(div;T ) to H−1/2(∂T ) that also
preserves polynomials.
2. Construction of the Trace Lifting
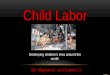
Let T denote the reference triangle with vertices located at A,
B and Cas shown in Fig. 1 and let F ∈ H1/2(∂T ) be given
real-valued data. Thegoal of the present work is to give an
explicit construction for a stable,polynomial preserving trace
lifting on the triangle. To this end, let ΦA, ΦBand ΦC be H
1/2-functions defined on the edges of the triangle whose
valueswill ultimately be determined in terms of the data F ∈
H1/2(∂T ). For agiven point P ∈ T , we construct three lines
passing through P parallel tothe edges of the triangle. The lines
are used to define portions γA(P ), γB(P )and γC(P ) of the
boundary as shown in Fig. 1. The value of the lifting EF
-
4 MARK AINSWORTH AND LESZEK DEMKOWICZ
B: (0, 3)
y
C: (−1,0) A: (0,1)xγ
γC
B
P: (x,y)
(P)
(P)Aγ
(P)
Figure 1. Reference triangle T showing portions of bound-ary
γA(P ), γB(P ) and γC(P ) used in the definition (3) of thevalue of
the extension at a point P ∈ T .
at a point P is defined to be the sum of the average values of
the functionsΦA, ΦB and ΦC over their respective sub-portions of
the boundary:
EF (P ) = –
∫
γA(P )ΦA + –
∫
γB(P )ΦB + –
∫
γC(P )ΦC (3)
where
–
∫
γΦ =
1
|γ|
∫
γΦ.
By introducing a parametrisation in terms of s ∈ (−1, 1) on each
edge,oriented so that the boundary is traversed in an anticlockwise
sense, wearrive at an explicit expression for the value of the
lifting at the point Pwith coordinates (x, y) in the form:
EF (x, y) =1
1 + x − y/√
3
∫ 1−2y/√3
−(x+y/√
3)ΦA(s) ds +
√3
2y
∫ x+y/√3
x−y/√
3ΦB(s) ds
+1
1 − x − y/√
3
∫ −x+y/√3
2y/√
3−1ΦC(s) ds. (4)
By taking a sequence of points approaching a given point P
located on theedge opposite to vertex A, we find that (in the sense
of traces),
F|A(s) = ΦA(s) +1
1 − s
∫ 1
sΦB(−t) dt +
1
1 + s
∫ s
−1ΦC(−t) dt
where s ∈ (−1, 1) is the value of the parameter corresponding to
the point Pand F|A denotes the restriction of F to the edge
opposite vertex A. Likewise,by repeating this process for the
remaining two edges, we obtain two furtherconditions on the
functions Φ, resulting in the following system of integral
-
EXPLICIT TRACE LIFTINGS 5
equations:
F|A(s) = ΦA(s) +1
1 − s
∫ 1
sΦB(−t) dt +
1
1 + s
∫ s
−1ΦC(−t) dt
F|B(s) = ΦB(s) +1
1 − s
∫ 1
sΦC(−t) dt +
1
1 + s
∫ s
−1ΦA(−t) dt
F|C(s) = ΦC(s) +1
1 − s
∫ 1
sΦA(−t) dt +
1
1 + s
∫ s
−1ΦB(−t) dt
(5)
for all s ∈ (−1, 1). Thus, the task of constructing a stable,
trace liftingis equivalent to establishing existence of solutions
to the system (5) andcontinuous dependence on the data. Observe
that we cannot expect a uniquesolution to the system since ΦA(s) =
c1s
2 + 2c0s and ΦB(s) = ΦC(s) =c1s
2 − c0 satisfies the homogeneous equations for all c0 and c1.The
study of (5) is facilitated by taking advantage of the invariance
of the
reference triangle under rotation. Specifically, let ω ∈
{exp(im2π/3) : m =−1, 0, 1} denote a fixed, cube root of unity. Let
us fix upon any particularedge (the edge opposite vertex A, say) of
the triangle and consider theeffect of successively rotating the
triangle through angles 0, 2π/3 and 4π/3,multiplying the equations
on the edge by 1, ω and ω2(= ω) respectively, andsumming the
resulting equations. The ensuing equation relates data
Fω = F|A + ωF|B + ωF|C (6)
to the new independent variable
Φω = ΦA + ωΦB + ωΦC (7)
through a scalar equation of the form:
Fω(s) = Φω(s) +ω
1 − s
∫ 1
sΦω(−t) dt +
ω
1 + s
∫ s
−1Φω(−t) dt. (8)
Alternatively, the same effect may be achieved purely
algebraically by form-ing appropriate linear combinations of the
equations appearing in the sys-tem (5).
By proceeding in this fashion for each distinct cube root of
unity, weeffectively decouple the system (5) into three scalar
equations involving newvariables Φ1, Φω and Φω. The fact that both
complex cube roots of unity ωsatisfy 1 + ω + ω = 0 may be exploited
to verify that the original variablesare uniquely determined in
terms of the new variables by the relations
ΦA =13 (Φ1 + Φω + Φω)
ΦB =13 (Φ1 + ωΦω + ωΦω)
ΦC =13 (Φ1 + ωΦω + ωΦω) .
(9)
Hence, it suffices to study the scalar integral equations of the
form (8) incases where ω is a cube root of unity.
-
6 MARK AINSWORTH AND LESZEK DEMKOWICZ
The study of these integral equations forms the topic of Section
4, whereit is shown that
Φ1 =1
4D
(1 − x2)∫ x
−1
F∆1 (s)
1 − s ds +1
1 + x
∫ x
−1(1 − s2)FΣ1 (s) ds
−(1 − x2)∫ 1
x
F∆1 (s)
1 + sds − 1
1 − x
∫ 1
x(1 − s2)FΣ1 (s) ds
(10)where D denotes the derivative and, FΣ1 and F
∆1 respectively denote the
even and odd parts of the data F1 = F|A + F|B + F|C . The
correspondingexpression in the case of a complex cube root ω is
slightly more involved.Let Fω = F|A + ωF|B + ωF|C , define
g±(x) = (1 − x)∫ x
−1
F∆ωR(s)
1 − s ds ∓ (1 + x)∫ 1
x
F∆ωL(s)
1 + sds (11)
where F∆ωL(s) = ωFω(s) − ωFω(−s) and F∆ωR(s) = ωFω(s) − ωFω(−s).
Thesolution Φω is given by Φω =
12(Σω + ∆ω) where
∆ω(x) = (12)
−D{
g+(x) +1
2
∫ 1
−1g+(s) ds − 1
1 + x
∫ x
−1g+(s) ds − 1
1 − x
∫ 1
xg+(s) ds
}
and
(ω − ω)Σω(x) = (13)
D
{g−(x) − 1
1 + x
∫ x
−1g+(s) ds +
1
1 − x
∫ 1
xg+(s) ds +
1
2x
∫ 1
−1g+(s) ds
}.
Observe that it is convenient to express these quantities as
derivativessince it is ultimately their primitives that are needed
in the expression forthe extension formula (3). By inspection we
see that if the data F arecontinuous piecewise polynomial of degree
at most N , then Φ1 and Φω arepolynomials of degree at most N + 1.
In turn, ΦA, ΦB and ΦC are alsopolynomials of degree at most N + 1
and it follows that the extension EFdefined in (4) preserves
polynomials.
We now state our main result while postponing the proof until
Section 5:
Theorem 1. Let F : ∂T → R be given data and let ω denote either
of thecomplex cube roots of unity. Define Φ1 and Φω as above. If
the functionsΦA, ΦB and ΦC appearing in (4) are taken to be
ΦA =13 {Φ1 + 2 Re(Φω)}
ΦB =13 {Φ1 + 2 Re(ωΦω)}
ΦC =13 {Φ1 + 2 Re(ωΦω)} ,
(14)
then the operator E defined in (4) formally defines a trace
lifting of F . More-over, if the data F are continuous piecewise
polynomials of degree at mostN on the boundary, then EF is a
polynomial of total degree at most N . Thelifting is stable in the
sense that
-
EXPLICIT TRACE LIFTINGS 7
2 4 6 8 10 12 14 16 18 20 220.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
Polynomial Degree
Ope
rato
r N
orm
M−S ExtensionA−D ExtensionOptimal Polynomial ExtensionOptimal
Extension (Approx.)
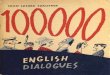
Figure 2. Comparison of norm of various extension opera-tors for
polynomial data supported on a single edge.
(1) if F ∈ L2(∂T ), then
‖EF‖H1/2(T ) ≤ C‖F‖L2(∂T ), (15)
(2) if F ∈ H1/2(∂T ), then
‖EF‖H1(T ) ≤ C‖F‖H1/2(∂T ) (16)
where C denotes positive constants independent of F and N .
In principle, bounds for the constants C could be extracted from
theproof, although we shall not attempt this. At any rate the
resulting boundsare likely to be overly pessimistic and we shall
instead content ourselves withevaluating the norm of the extension
operator for polynomial data defined ona single edge for increasing
degree, giving the results shown in Fig. 2 for thecase of
H1-extensions. In addition, we also present values of the norm of
theextension operator defined in (2). For comparison, we also give
values of thenorms for two other extension operators. The optimal
extension operatorwould be obtained by solving the Dirichlet
problem for the Laplacian usingpolynomial data, while the optimal
polynomial extension may be obtainedby computing the Galerkin
approximation of the Dirichlet problem usingpolynomials of total
degree equal at most to the order of the boundarydata. By
increasing the order of approximation, we are able to compute
anapproximation to the optimal extension. The cost of evaluating
the norms ofthese additional operators becomes prohibitive for
large polynomial order,and only values for orders up to 13 have
been given.
-
8 MARK AINSWORTH AND LESZEK DEMKOWICZ
2.1. An H(div;T )-Extension Operator. Let H(div;T ) denote the
space
H(div;T ) = {v ∈ L2(T ) : div v ∈ L2(T )} (17)equipped with the
graph norm. This function space arises naturally in thevariational
formulation of any problem in continuum mechanics where
aconservation principle is at work [12]. It is well-established
that for any given
data G ∈ H−1/2(∂T ), there exists U ∈ H(div;T ) whose normal
componenton the boundary of the triangle agrees with G in the sense
of H−1/2(∂T )and such that
‖U‖H(div;T ) ≤ C‖G‖H−1/2(∂T ). (18)The existence and
construction of stable, polynomial extensions is of consid-erable
importance in the numerical analysis of high order numerical
methodsfor such problems [13]. The fact that the boundary data G is
an elementof a dual space obliges one to consider a single step
lifting from the entireboundary, and the extension operator E of
Theorem 1 proves useful in thisrespect.
Denote the average value of G by G0 = 〈G, 1〉/|∂T |, where 〈·, ·〉
de-notes the duality pairing on H−1/2(∂T ) × H1/2(∂T ), and note
that G0 iswell-defined and bounded in absolute value by a multiple
of ‖G‖H−1/2(∂T ).Clearly, G − G0 ∈ H−1/2(∂T ) has vanishing average
value and as a con-sequence there exists F ∈ H1/2(∂T ), determined
up to the addition of anarbitrary constant, such that
G − G0 =∂F
∂sin H−1/2(∂T ) (19)
where s denotes arc-length on the boundary ∂T . In particular, F
may bechosen so that ‖F‖H1/2(∂T ) ≤ C‖G‖H−1/2(∂T ). Define an
operator E by therule
EG =
[x√
3
y√
3 − 1
]G0 + grad
⊥(EF ). (20)
Observe that E is well-defined since E preserves constants
meaning that EGis independent of the particular choice of F . Our
main result concerningproperties of E is now an easy consequence of
Theorem 1:
Corollary 1. Let G ∈ H−1/2(∂T ). Then, EG ∈ H(div;T ) satisfiesn
· EG |∂T = G in H−1/2(∂T ) (21)
where n is the unit outward normal on ∂T , and
‖EG‖H(div;T ) ≤ C‖G‖H−1/2(∂T ) (22)where C is a positive
constant independent of G. Moreover, if G can beidentified with a
piecewise polynomial of degree at most N on each edge,then EG is
polynomial of total degree at most N .
Proof. Elementary computation may be used to verify that (21)
holds thanksto (19) and, with the aid of the triangle inequality,
that
‖EG‖H(div;T ) ≤ C |G0| + |EF |H1(T ).The bound (22) follows at
once thanks to Theorem 1 and the estimates for|G0| and ‖F‖H1/2(∂T )
recorded earlier. The statement concerning polynomialdata is a
trivial consequence of Theorem 1. ¤
-
EXPLICIT TRACE LIFTINGS 9
3. Some auxiliary operators and their properties
Let I denote the reference interval (−1, 1). For integer n, the
usualSobolev space [1] is denoted by Hn(I). For non-integer s ∈ (n,
n + 1),the space Hs(I) is defined by the K-method of interpolation
[6] between thespaces Hn(I) and Hn+1(I).
Let I denote the identity, M denote the averaging operator
Mφ =1
2
∫
Iφ(s) ds, (23)
and formally define operators AL and AR by the rules
AL φ(s) =1
1 + s
∫ s
−1φ(t) dt (24)
and
AR φ(s) =1
1 − s
∫ 1
sφ(t) dt (25)
for s ∈ I. Operators of this type are sometimes referred to as
Hardy av-eraging operators [10, 23, 24], and the following forms of
Hardy’s inequal-ity [17, 21], valid for α > 0, will be useful in
establishing certain of theirproperties:
∫
I
∣∣∣∣(1 + s)−α
∫ s
−1
F (t)
1 + tdt
∣∣∣∣2 ds
1 + s≤ 1
α2
∫
I
∣∣(1 + s)−αF (s)∣∣2 ds
1 + s. (26)
and∫
I
∣∣∣∣(1 + s)α
∫ 1
s
F (t)
1 + tdt
∣∣∣∣2
ds
1 + s≤ 1
α2
∫
I|(1 + s)αF (s)|2 ds
1 + s. (27)
The operators are related by the rule (AR φ)− = AL φ− where we
use thenotation φ± to denote the functions s 7→ φ(±s). In the
sequel, we shalltacitly exploit the relationship between AR and AL
to deduce propertiesof AR from those of AL. Consequently, only
properties of AL are givenexplicitly:
Lemma 1. Let AL be defined as above. Then,
(1) for n = 0, 1, . . ., and φ ∈ Hn(I),
(AL φ)(n)(s) =
1
(1 + s)n+1
∫ s
−1(1 + t)nφ(n)(t) dt (28)
and
‖(AL φ)(n)‖L2(I) ≤(
n +1
2
)−1‖φ(n)‖L2(I) (29)
(2) for n = 0, 1, . . ., the operator AL : Hn+1/2(I) → Hn+1/2(I)
is
bounded and linear with
‖AL φ‖Hn+1/2(I) ≤ C‖φ‖Hn+1/2(I) (30)where C is a positive
constant independent of φ
(3) ∫
I|φ(s) − AL φ(s)|2
ds
1 + s≤ 1
3‖φ‖2
H1/2(I). (31)
-
10 MARK AINSWORTH AND LESZEK DEMKOWICZ
Proof. (1) The statement is obviously true in the case n = 0.
Proceed-ing by mathematical induction, suppose the assertion holds
up to n, thendifferentiation gives
(AL φ)(n+1)(s) =
1
1 + sφ(n)(s) − n + 1
(1 + s)n+2
∫ s
−1(1 + t)nφ(n)(t) dt
and integrating by parts shows that the assertion holds up to n
+ 1. Usingexpression (28) and applying inequality (26) with α = n +
1/2 and F (t) =
(1 + t)n+1φ(n)(t) gives∫
I
∣∣∣(AL φ)(n)(s)∣∣∣2
ds =
∫
I
∣∣∣∣1
(1 + s)n+1
∫ s
−1(1 + t)nφ(n)(t)
∣∣∣∣2 ds
1 + s
≤(
n +1
2
)−2 ∫
I|φ(n)(t)|2 dt.
(2) Apply operator interpolation using cases n and n + 1 in part
(1).(3) By writing
φ(s) − AL φ(s) =1
1 + s
∫ s
−1(φ(s) − φ(t)) dt
and using the Cauchy-Schwarz inequality, we deduce that
|φ(s) − AL φ(s)|2 ≤1
3(1 + s)
∫
I
∣∣∣∣φ(s) − φ(t)
s − t
∣∣∣∣2
dt
which, after rearranging and integrating over I, gives the
claimed estimate.¤
Let BR and BL denote the operators formally defined by the
rules
BR φ(s) = (1 − s)∫ s
−1
φ(t)
1 − t dt (32)
and
BL φ(s) = −(1 + s)∫ 1
s
φ(t)
1 + tdt. (33)
These operators are related to dual Hardy averaging operators
[23]. We need
some further notation before recording some useful properties.
Let H1/2L (I)
denote the subspace
H1/2L (I) =
{φ ∈ H1/2(I) : (1 + s)−1/2φ ∈ L2(I)
}(34)
equipped with the norm defined by
‖v‖2H
1/2L (I)
= ‖v‖2H1/2(I)
+
∫
I|v(s)|2 ds
1 + s. (35)
Likewise, H1/2R (I) denotes the subspace obtained by replacing
1+ s by 1− s
in the definition. Following [19], the intersection of these
spaces is denoted
by H1/200 (I) and is equipped with the norm
‖v‖2H
1/200
(I)= ‖v‖2
H1/2(I)+
∫
I|v(s)|2 ds
1 − s2 . (36)
-
EXPLICIT TRACE LIFTINGS 11
As before, it is our intention to use the relationship (BL φ)− =
BR φ− to de-duce properties of BR from those of BL without
explicitly drawing attentionto the fact.
Lemma 2. Let D denote the derivative operator. Then
(1) For ψ ∈ L2(I),‖(1 + s)−1 BL ψ‖L2(I) ≤ 2‖ψ‖L2(I), (37)
‖BL ψ‖L2(I) ≤2
3‖(1 + s)ψ‖L2(I) (38)
and
‖D BL ψ‖L2(I) ≤ 3‖ψ‖L2(I) (39)(2) BL : L2(I) → H1/200 (I) is
bounded with
‖BL ψ‖H1/200
(I)≤ C‖ψ‖L2(I) (40)
(3) D BL : H1/2L (I) → H1/2(I)/R is bounded with
‖D BL ψ‖H1/2(I) ≤ C‖ψ‖H1/2L (I). (41)
In each case, C is a positive constant independent of ψ.
Proof. (1) The first two estimates are simply inequality (27)
with α chosento be 1/2 and 3/2 respectively. Applying the triangle
inequality to theidentity
D BL ψ(s) = −∫ 1
sψ(t)
dt
1 + t+ ψ(s)
and using inequality (27) with α = 1/2, gives
‖DBL ψ‖L2(I) ≤ 2‖ψ‖L2(I) + ‖ψ‖L2(I). (42)(2) Operator
interpolation using the results of part (1) gives boundedness
of BL : L2(I) → H1/2(I). It suffices to show that there exists a
positiveconstant C such that if ψ ∈ L2(I), then
∫
I
|BL ψ(s)|21 − s2 ds ≤ C‖ψ‖
2L2(I)
.
Applying the Cauchy-Schwarz inequality gives∫
I
|BL ψ(s)|21 − s2 ds =
∫
I
1 + s
1 − s
∣∣∣∣∫ 1
s
ψ(t)
1 + tdt
∣∣∣∣2
ds ≤∫
I(1 + s)
∫ 1
s
|ψ(t)|2(1 + t)2
dt ds.
Supposing for the moment that the order of integration may be
interchanged,the right hand side may be rewritten as
∫
I
|ψ(t)|2(1 + t)2
∫ t
−1(1 + s) dsdt =
1
2‖ψ‖2L2(I).
The interchange of order is now justified using Fubini’s theorem
and the factthat the above integral is bounded whenever ψ ∈
L2(I).
(3) Observing that
D2BL ψ(s) = Dψ(s) −
ψ(s)
1 + s
-
12 MARK AINSWORTH AND LESZEK DEMKOWICZ
and applying the triangle inequality and using (42) gives the
estimate
‖D BL ψ‖H1(I) ≤ ‖ψ‖H1(I) + ‖(1 + s)−1ψ‖L2(I) ≤
C‖ψ‖H1(I).Interpolating using the above estimate and (42) gives
‖D BL ψ‖H1/2(I) ≤ C‖ψ‖H1/200
(I)(43)
as claimed. The proof is concluded by noting that D BL ψ has
vanishing
mean I since BL ψ ∈ H1/200 (I). ¤The relationship between AL and
BL is the subject of the following result.
Lemma 3. Let I−AL be formally defined by the rule
(I−AL)φ(s) = φ(s) −1
1 + s
∫ s
−1φ(t) dt, s ∈ I. (44)
Then, the following operators are bounded, linear and
bijective
(1) I−AL : L2(I)/R → L2(I) with (I−AL)D BL = I on L2(I).(2) I−AL
: H1/2(I)/R → H1/2L (I) with (I−AL)D BL = I on H
1/2L (I).
Proof. We use the same notation for both operators described
above sincethis is unlikely to cause confusion. Lemma 1(1) shows
that the first operatoris bounded while parts (2) and (3) of Lemma
1 show that the second operatoris bounded. Suppose that (I−AL)φ
vanishes for φ ∈ L2(I),
(1 + s)φ(s) =
∫ s
−1φ(t) dt, s ∈ I,
then φ must be constant and as a consequence both operators are
injective.Let ψ ∈ L2(I) then, thanks to Lemma 2(1), DBL ψ ∈
L2(I)/R, since BL ψ ∈H
1/200 (I) by Lemma 2(2). The same result also shows that
(I−AL)D BL ψ = −D(
(1 + s)
∫ 1
s
ψ(t)
1 + tdt
)+
∫ 1
s
ψ(t)
1 + tdt = ψ
and we conclude that the first operator is surjective and that
(I−AL)D BLreduces to the identity on L2(I)/R. The argument for the
second operatorfollows along the same lines using Lemma 2(3) in
place of Lemma 2(1). ¤
4. Analysis of the Integral Equations
Throughout this section, let ω denote a fixed, cube root of
unity and, forsuitable data f : I → C, consider the integral
equation
φ(x) +ω
1 − x
∫ 1
xφ(−t) dt + ω
1 + x
∫ x
−1φ(−t) dt = f(x), x ∈ I. (45)
4.1. Compatibility Conditions. We begin by deriving conditions
on thedata f that are necessary for the existence of a solution φ ∈
L2(I) or φ ∈H1/2(I). The conditions in the latter case will be
expressed in terms offunctions f∆L = ωf+−ωf− and f∆R = ωf+−ωf−. For
simplicity, we suppressthe dependence on ω in these notations since
this will be clear from the
context. The relationship (f∆R )− = −(f∆L )+ shows that f∆L ∈
H1/2L (I) is
equivalent to f∆R ∈ H1/2R (I). Although this fact could be used
to streamline
the statement of the next result, we prefer instead to highlight
symmetry:
-
EXPLICIT TRACE LIFTINGS 13
Lemma 4. Suppose that φ satisfies equation (45). Then,
(1) if φ ∈ L2(I), then f ∈ L2(I) and ‖f‖L2(I) ≤ C‖φ‖L2(I)(2) if
φ ∈ H1/2(I), then f ∈ H1/2(I) must satisfy f∆L ∈ H
1/2L (I), or
equivalently f∆R ∈ H1/2R (I), and
‖f∆L ‖H1/2L (I) + ‖f∆R ‖H1/2R (I) ≤ C‖φ‖H1/2(I). (46)
In each case, C is a positive constant that only depends on
ω.
Proof. The first statement follows at once by writing
f = φ + ω AL φ− + ω AR φ−
and then applying the triangle inequality along with estimates
from Lemma 1(1).The proof in the second case is less
straightforward. Write
f∆L (s) = ω(I−AL)φ+(s) − ω(I−AL)φ−(s) − AR(φ+ − φ−)(s).With the
aid of parts (2) and (3) of Lemma 1, we see that the first termmay
be bounded as
‖ω(I−AL)φ+‖H1/2L (I) ≤ C‖φ‖H1/2(I)and observe that the second
term may be bounded in the same way. Lemma 1may also be used to
obtain
‖AR φ−‖H1/2(I) + ‖AR φ+‖H1/2(I) ≤ C‖φ‖H1/2(I).
It only remains to bound ‖(1 + s)−1/2 AR(φ+ − φ−)‖L2(I).
Now,
AR(φ+ − φ−)(s) =1
1 − s
∫ 1
s(φ(t) − φ(−t)) dt
and by noting that the integrand is an odd function, we may
rewrite this inthe form
AR(φ+ − φ−)(s) =1
1 − s
∫ 1
|s|(φ(t) − φ(−t)) dt.
Finally, using the fact that (1 + s)(1 − s)2 ≥ (1 − |s|)2 for s
∈ I, we obtain
‖(1 + s)−1/2 AR(φ+ − φ−)‖2L2(I)
≤∫
I
∣∣∣∣∣1
1 − |s|
∫ 1
|s|(φ(t) − φ(−t)) dt
∣∣∣∣∣
2
ds
then, noting that the integrand is an even function, this may be
written inthe form
2
∫ 1
0
∣∣∣∣1
1 − s
∫ 1
s(φ(t) − φ(−t)) dt
∣∣∣∣2
ds
and, applying Hardy’s inequality, this may be bounded by 8‖φ(t)
− φ(−t)‖2L2(I)which is in turn bounded in terms of ‖φ‖2L2(I). This
completes the proof ofthe estimate for ‖f∆L ‖H1/2L (I). The
estimate for the remaining term followsdirectly from the
relationship between f∆R and f
∆L alluded to earlier. ¤
-
14 MARK AINSWORTH AND LESZEK DEMKOWICZ
The remainder of this section is concerned with proving these
conditionsgiven in Lemma 4 are sufficient for existence of
solutions, obtaining closedform expressions and establishing
continuous dependence on the data. Webegin by deriving a pair of
equations for the odd and even parts of φ givenby ∆ = φ+ −φ− and Σ
= φ+ +φ− respectively. Substituting for φ+ and φ−in terms of ∆ and
Σ in equation (45) gives
(I +ω AL +ω AR)Σ + (I−ω AL −ω AR)∆ = 2f+and replacing x by −x
and simplifying gives
(I+ω AL +ω AR)Σ − (I−ω AL −ω AR)∆ = 2f−.Adding and subtracting
these equations gives the following system
(2 I−(ω + ω)(AL + AR)) ∆ + (ω − ω)(AL −AR)Σ = 2f∆
(ω − ω)(AL −AR)∆ + (2 I+(ω + ω)(AL + AR)) Σ = 2fΣ(47)
where f∆ and fΣ denote the odd and even parts of f . Observe
that theexistence of a solution of this system having the correct
parity may be usedto infer the existence of a solution of the
scalar equation (45) by retracingthe steps leading to (47).
4.2. Analysis in the case ω = 1. If ω is taken to be unity, the
system (47)decouples to give
(I−AL −AR)∆ = f∆ (48)and
(I+ AL + AR)Σ = fΣ. (49)
Lemma 4 gives necessary conditions for the existence of a
solution in L2(I)
or H1/2(I) to (45) in terms of the data f . The following result
shows thatthese conditions are also sufficient.
Lemma 5. Suppose ω = 1. Equation (45) has a formal solution φ
whoseodd and even parts are given by
∆ =1
2D
{(1 − x2)
∫ x
−1
f∆(s)
1 − s ds − (1 − x2)
∫ 1
x
f∆(s)
1 + sds
}(50)
and
Σ =1
2D
{1
1 + x
∫ x
−1(1 − s2)fΣ(s) ds − 1
1 − x
∫ 1
x(1 − s2)fΣ(s) ds
}. (51)
Moreover, if the data f satisfy
(1) f ∈ L2(I), then‖∆‖L2(I) ≤ C‖f∆‖L2(I) (52)
and
‖Σ‖L2(I) ≤ C‖fΣ‖L2(I), (53)(2) fΣ ∈ H1/2(I) and f∆ ∈ H1/200 (I),
then
‖∆‖H1/2(I) ≤ C‖f∆‖H1/200
(I)(54)
and
‖Σ‖H1/2(I) ≤ C‖fΣ‖H1/2(I). (55)
-
EXPLICIT TRACE LIFTINGS 15
In each case, C is a positive constant independent of f .
Proof. It is not difficult to check that the expressions for ∆
and Σ indeedhave the correct parities. Therefore, thanks to the
foregoing arguments,it suffices to check that ∆ and Σ satisfy
equations (48) and (49). Simplecomputation reveals that
(AL + AR)∆ = −x∫ x
−1
f∆(s)
1 − s ds + x∫ 1
x
f∆(s)
1 + sds,
while expanding the derivative gives
∆ = f∆ − x∫ x
−1
f∆(s)
1 − s ds + x∫ 1
x
f∆(s)
1 + sds.
Together, these show that the expression for ∆ satisfies (48).
Writing
∆ = f∆ − x(
1
1 − x BR f∆ +
1
1 + xBL f
∆
)
and using Lemma 2(1) gives ‖∆‖L2(I) ≤ C‖f∆‖L2(I) for f∆ ∈ L2(I).
Fur-thermore, for f∆ ∈ H10 (I), we have
D∆ = D f∆ −(
1
1 − x BR f∆ +
1
1 + xBL f
∆
)+ x(AR −AL)D f∆,
and hence, using part (1) of Lemma 1 to bound the final term by
4‖D f∆‖L2(I)and we conclude that
‖∆‖H1(I) ≤ C‖f∆‖H1(I) ≤ C‖D f∆‖L2(I)for f∆ ∈ H10 (I).
Interpolation then gives the bound for ‖∆‖H1/2(I).
Turning to the even part, expanding the derivative gives
Σ = fΣ − 12(1 + x)2
∫ x
−1(1 − s2)fΣ(s) ds − 1
2(1 − x)2∫ 1
x(1 − s2)fΣ(s) ds.
(56)Meanwhile, elementary manipulations give
AL Σ =1
2(1 + x)2
∫ x
−1(1 − s2)fΣ(s) ds
− 12(1 − x2)
∫ 1
x(1 − s2)fΣ(s) ds + 1
4(1 + x)
∫ 1
−1(1 − s2)fΣ(s) ds
with a similar expression for AR Σ. Simplifying leads to the
conclusion thatΣ satisfies (49). Let F± be a primitive of (1 ±
s)fΣ, then we may useLemma 1(1) to rewrite (56) in the form
Σ = fΣ − 12
DAL F− − 1
2DAR F
+.
Once again thanks to Lemma 1, we have
1
2‖D AL F−‖L2(I) ≤
1
3‖DF−‖L2(I) ≤ C‖fΣ‖L2(I)
and1
2‖D2 AL F−‖L2(I) ≤
1
5‖D2 F−‖L2(I) ≤ C‖fΣ‖H1(I)
-
16 MARK AINSWORTH AND LESZEK DEMKOWICZ
with similar bounds for derivatives of AR F+. Thus, we arrive at
‖Σ‖Hr(I) ≤
C‖fΣ‖Hr(I) for r = 0 and r = 1, and the bound in the case r =
1/2 is againobtained by interpolation. ¤
4.3. Analysis in the case ω 6= 1. If ω is a complex cube root of
unity,then ω + ω = −1 and the system (47) takes the form
(2 I+ AL + AR)∆ + (ω − ω)(AL −AR)Σ = 2f∆
(ω − ω)(AL −AR)∆ + (2 I−AL −AR)Σ = 2fΣ.(57)
A necessary condition for the existence of a solution is that
the data satisfy
f∆L ∈ H1/2L (I), or equivalently, f
∆R ∈ H
1/2R (I). The coupled nature of (57)
frustrates efforts to obtain closed form solutions for the odd
and even parts.Nevertheless, by analogy with Lemma 5, we have the
following result:
Lemma 6. Suppose ω is a complex cube root of unity. Equation
(45) hasa formal solution φ whose odd and even parts are given by ∆
and Σ respec-tively, where
∆ = −D (I+ M−AL −AR) (BR f∆R + BL f∆L ) (58)
and
(ω − ω)Σ =D
{(BR f
∆R − BL f∆L ) + (AR −AL +xM)(BR f∆R + BL f∆L )
}. (59)
Moreover, if the data f satisfy
(1) f ∈ L2(I), then
‖∆‖L2(I) + ‖Σ‖L2(I) ≤ C‖f‖L2(I), (60)
(2) f ∈ H1/2(I) satisfies the compatibility condition f∆L ∈
H1/2L (I), or
equivalently f∆R ∈ H1/2R (I), then
‖∆‖H1/2(I) + ‖Σ‖H1/2(I) ≤ C{‖f∆L ‖H1/2L (I) + ‖f
∆R ‖H1/2R (I)
}, (61)
where C is a positive constant independent of f .
Proof. It is not difficult to check that BR f∆R +BL f
∆L is an even function and
in turn that the right hand side of (58) defines an odd
function. Likewise,BR f
∆R −BL f∆L is an odd function and the right hand side of (59)
defines an
even function. Thus, the expressions for ∆ and Σ have the
correct parities.Denote g = BR f
∆R + BL f
∆L and note that if f
∆R and f
∆L ∈ L2(I), then
Lemma 2(2) implies that g ∈ H1/200 (I). Let Φ = (I + M−AL −AR)g,
thenwe claim that Φ satisfies
Φ + (BR AL + BL AR)D Φ = g. (62)
Elementary manipulation shows that
(BR AL ±BL AR)DΦ = (1 − x)∫ x
−1
Φ(s)
1 − s2 ds ± (1 + x)∫ 1
x
Φ(s)
1 − s2 ds.
-
EXPLICIT TRACE LIFTINGS 17
Now, noting that
1
2D(M + AL −AR)g
=1
1 − x2{
g(x) − 1 + x2(1 − x)
∫ 1
xg(s) ds − 1 − x
2(1 + x)
∫ x
−1g(s) ds
}
=1
1 − x2 (I + M−AL −AR)g =Φ(x)
1 − x2 .
and observing that (M + AL −AR)g(−1) vanishes thanks to g ∈
H1/200 (I),we deduce that ∫ x
−1
Φ(s)
1 − s2 ds =1
2(M + AL −AR)g. (63)
Furthermore, (M + AL −AR)g(1) = M g for g ∈ H1/200 (I) and,
using (63), itfollows that ∫ 1
x
Φ(s)
1 − s2 ds =1
2(M−AL + AR)g.
Thus,
(BR AL + BL AR)DΦ = M g − x(AL −AR)g,and as a consequence
Φ + (BR AL + BL AR)DΦ = g + 2M g − (1 + x)AL g − (1 − x)AR g =
gwhich establishes (62). By differentiating and substituting DΦ =
−∆ wefind that ∆ satisfies
∆ = −D(BR f∆R + BL f∆L ) − D(BR AL + BL AR)∆. (64)Similar
arguments reveal that
(BR AL −BL AR)∆ = −(BR AL −BL AR)DΦ = (AR −AL +xM)gand we deduce
that Σ satisfies
(ω − ω)Σ = D(BR f∆R − BL f∆L ) + D(BR AL −BL AR)∆. (65)Adding
and subtracting equations (64) and (65) gives
∆ + (ω − ω)Σ = −2 D BL(f∆L + AR ∆)∆ − (ω − ω)Σ = −2 D BR(f∆R +
AL ∆).
Now, if the data f belong to L2(I), then the right hand side of
the firstequation also belongs to L2(I). Moreover, AR ∆(−1) = M ∆ =
0 since ∆is odd, and if f∆L ∈ H
1/2L (I), then the right hand side belongs to H
1/2L (I).
Hence, applying the appropriate operator I−AL defined in Lemma
3, weobtain
(I−AL)∆ + (ω − ω)(I−AL)Σ = −2(f∆L + AR ∆).A similar treatment of
the remaining equation using the hypotheses on f∆Rleads to
(I−AR)∆ − (ω − ω)(I−AR)Σ = −2(f∆R + AL ∆).Finally, adding these
equations we arrive at
(2 I + AL + AR)∆ + (ω − ω)(AL −AR)Σ = 2f∆
-
18 MARK AINSWORTH AND LESZEK DEMKOWICZ
while subtraction gives
−3(AL −AR)∆ + (ω − ω)(2 I−AL −AR)Σ = 2(ω − ω)fΣ,and so,
multiplying by (ω − ω)/3 and noting that |ω − ω| =
√3, we arrive
at
(ω − ω)(AL −AR)∆ + (2 I−AL −AR)Σ = 2fΣ.Thus, ∆ and Σ satisfy
(57) and the formal solvability of (45) follows.
It remains to demonstrate the boundedness of ∆ and Σ. With the
aid ofLemma 1(1), we find that
‖D AR BL f∆L ‖L2(I) + ‖D AL BL f∆L ‖L2(I) ≤ C‖BL f∆L ‖L2(I)and
applying Lemma 1(2) gives
‖D AR BL f∆L ‖H1/2(I) + ‖DAL BL f∆L ‖H1/2(I)≤ C
{‖BL f∆L ‖L2(I) + ‖D BL f∆L ‖H1/2(I)
}.
It is trivial to see that the same bounds hold for D(I−M)BL f∆L
. Byparts (1) and (3) of Lemma 2, we have
‖BL f∆L ‖L2(I) ≤ C‖f∆L ‖L2(I)and
‖BL f∆L ‖L2(I) + ‖D BL f∆L ‖H1/2(I) ≤ C‖f∆L ‖H1/2L (I).
By applying the triangle inequality, we obtain
‖D(I+ M−AR −AL)BL f∆L ‖L2(I) ≤ C‖f∆L ‖L2(I)and
‖D(I + M−AR −AL)BL f∆L ‖H1/2(I) ≤ C‖f∆L ‖H1/2L (I).
Thanks to symmetry, there holds
‖D(I+ M−AR −AL)BR f∆R ‖L2(I) ≤ C‖f∆R ‖L2(I)and
‖D(I + M−AR −AL)BR f∆R ‖H1/2(I) ≤ C‖f∆R ‖H1/2R (I)and the bounds
for ∆ follow at once. Concerning the bound for the evenpart Σ, we
observe that the only term that has not already been accountedfor
is the mean value M(BR f
∆L +BL f
∆R ). In view of the fact that the mean
value is constant, it suffices to note that the L2-norm of the
argument ofM may be bounded in terms of ‖f∆L ‖L2(I) and ‖f∆R ‖L2(I)
thanks to the firstpart of Lemma 2. ¤
5. Proof of Theorem 1
Let F : ∂T → R be given data and let F|A, F|B and F|C denote
therestrictions of F to the edges opposite vertices A, B and C
respectively.We begin by verifying that the data satisfy the
compatibility conditionsdescribed in Lemma 4. The compatibility
conditions given in Lemma 4(1)are trivially satisfied for data F ∈
L2(I), and so we turn our attention to
-
EXPLICIT TRACE LIFTINGS 19
the case where F ∈ H1/2(∂T ). It may be shown (e.g. [16]) that
‖F‖2H1/2(∂T )
is equivalent to
‖FA‖2H1/2(γA) + ‖FB‖2H1/2(γB)
+ ‖FC‖2H1/2(γC)+‖(1 + s)−1/2(FA(s) − FC(−s))‖2L2(I)+‖(1 +
s)−1/2(FB(s) − FA(−s))‖2L2(I)+‖(1 + s)−1/2(FC(s) −
FB(−s))‖2L2(I),
and it follows that FA(s)−FC(−s), FB(s)−FA(−s), FC(s)−FB(−s)
belongto H
1/2L (I). To begin with, let ω denote an arbitrary cube root of
unity. The
data Fω for the decoupled problem (8) are given by Fω = F|A
+ωF|B +ωF|C .By writing
F∆ωL(s) = ωFω(s) − ωFω(−s) =ω (FA(s) − FC(−s)) + ω (FB(s) −
FA(−s)) + (FC(s) − FB(−s)) ,
we see that F∆ωL ∈ H1/2L (I), or equivalently, F
∆ωR ∈ H
1/2R (I). Furthermore,
by applying the triangle inequality, we have
‖F∆ωL‖L2(I) + ‖F∆ωR‖L2(I) ≤ C‖F‖L2(∂T ) (66)and
‖F∆ωL‖H1/2L (I) + ‖F∆ωR‖H1/2R (I) ≤ C‖F‖H1/2(∂T ) (67)
where C is a positive constant independent of F . If ω = 1, then
F∆ωL =F∆ωR = F
∆ and the above estimates specialise to
‖FΣ‖L2(I) + ‖F∆‖L2(I) ≤ C‖F‖L2(∂T ) (68)and
‖FΣ‖H1/2(I) + ‖F∆‖H1/200
(I)≤ C‖F‖H1/2(∂T ). (69)
The compatibility conditions of Lemma 4(2) are therefore
satisfied automat-
ically for all values of ω provided that F ∈ H1/2(∂T ). Thanks
to Lemmas 5and 6, solutions of the decoupled equation (8) exist for
ω a cube root ofunity.
Suppose now that ω is a complex cube root of unity. The data Fω
andFω satisfy the relation Fω = Fω. In turn, it is not difficult to
verify that
F∆ωL = F∆ωL and F
∆ωR = F
∆ωR. The expressions for ∆ω and Σω given in
Lemma 6 depend on BR F∆ωR and BL F
∆ωL. However, in view of the fact
that BR F∆ωR = BR F∆ωR = BR F
∆ωR, along with a similar identity for BL F
∆ωL,
we conclude that ∆ω = ∆ω and Σω = Σω, and hence that Φω =
Φω.Consequently, equations (9) reduce to the form claimed in
Theorem 1.
Taking the average of the expressions for ∆ and Σ given in Lemma
5,we arrive at the formula (10) quoted earlier for Φ1. Moreover,
again byLemma 5, we have
‖Φ1‖L2(I) ≤ C{‖FΣ‖L2(I) + ‖F∆‖L2(I)
}≤ C‖F‖L2(∂T )
and
‖Φ1‖H1/2(I) ≤ C{‖FΣ‖H1/2(I) + ‖F∆‖H1/2
00(I)
}≤ C‖F‖H1/2(∂T )
-
20 MARK AINSWORTH AND LESZEK DEMKOWICZ
thanks to (68) and (69). Observe that the data BR F∆ωR ±BL F∆ωL
appearing
in Lemma 6 coincide with the quantities g± defined in (11).
Consequently,expressions (12) and (13) agree with the ones quoted
in Lemma 6, and henceΦω satisfies (8). Furthermore, using (66),
(67) and Lemma 6, we have
‖Φω‖L2(I) ≤ C{‖F∆ωL‖L2(I) + ‖F∆ωR‖L2(I)
}≤ C‖F‖L2(∂T )
and
‖Φω‖H1/2(I) ≤ C{‖F∆ωL‖H1/2L (I) + ‖F
∆ωR‖H1/2R (I)
}≤ C‖F‖H1/2(∂T ).
Therefore, using equation (9) and the triangle inequality, we
conclude that
‖ΦA‖L2(I) + ‖ΦB‖L2(I) + ‖ΦC‖L2(I) ≤ C‖F‖L2(∂T ). (70)and
‖ΦA‖H1/2(I) + ‖ΦB‖H1/2(I) + ‖ΦC‖H1/2(I) ≤ C‖F‖H1/2(∂T ). (71)By
Lemma 7.1 of [3] or Theorem 2.2 of [8], there exists a positive
constantC such that
‖Φ̃A‖H1/2(T ) ≤ C‖ΦA‖L2(I)and
‖Φ̃A‖H1(T ) ≤ C‖ΦA‖H1/2(I)where Φ̃A denotes the first term
appearing in equation (4). The same esti-mates apply to the
remaining terms giving
‖EF‖H1(T ) ≤ C{‖ΦA‖H1/2(I) + ‖ΦB‖H1/2(I) + ‖ΦC‖H1/2(I)
}
and
‖EF‖H1(T ) ≤ C{‖ΦA‖H1/2(I) + ‖ΦB‖H1/2(I) + ‖ΦC‖H1/2(I)
},
and, thanks to estimates (70) and (71), we conclude that the
extension hasthe required stability properties. This completes the
proof of Theorem 1since the claims concerning polynomial preserving
properties of the exten-sions were discussed prior to Theorem
1.
References
[1] R. A. Adams, Sobolev spaces, Academic Press, New
York-London, 1975. Pure andApplied Mathematics, Vol. 65.
[2] M. Ainsworth and B. Guo, An additive Schwarz preconditioner
for p-versionboundary element approximation of the hypersingular
operator in three dimensions,Numer. Math., 85 (2000), pp.
343–366.
[3] I. Babuska, A. Craig, J. Mandel, and J. Pitkaranta,
Efficient pre-conditioningfor the p version of the finite element
method in R2, SIAM J. Numer. Anal., 28 (1991),pp. 624–661.
[4] I. Babuska and M. Suri, The h-p version of the finite
element method with quasi-uniform meshes, RAIRO Anal. Numér., 21
(1987), pp. 199–238.
[5] F. Ben Belgacem, Polynomial extensions of compatible
polynomial traces in threedimensions, Comput. Methods Appl. Mech.
Engrg., 116 (1994), pp. 235–241. ICOSA-HOM’92 (Montpellier,
1992).
[6] J. Bergh and J. Löfström, Interpolation Spaces,
Springer-Verlag, 1976.[7] C. Bernardi, M. Dauge, and Y. Maday,
Relèvements de traces préservant les
polynômes, C. R. Acad. Sci. Paris Sér. I Math., 315 (1992),
pp. 333–338.
-
EXPLICIT TRACE LIFTINGS 21
[8] C. Bernardi, M. Dauge, and Y. Maday, Interpolation of
nullspaces for polyno-mial approximation of divergence–free
functions in a cube, in Boundary Value Prob-lems and Integral
Equations in Non-Smooth Domains, M. Costabel, M. Dauge, andS.
Nicaise, eds., vol. 167 of Lecture notes in pure and applied
mathematics, MarcelDekker Inc., New York, 1995, pp. 27–46.
[9] C. Bernardi and Y. Maday, Relèvement polynomial de traces
et applications,RAIRO Modél. Math. Anal. Numér., 24 (1990), pp.
557–611.
[10] R. P. Boas, Jr. and C. O. Imoru, Elementary convolution
inequalities, SIAM J.Math. Anal., 6 (1975), pp. 457–471.
[11] J. Bramble, J. Pasciak, and A. Schatz, The construction of
preconditioners forelliptic problems by substructuring I, Math.
Comp., 47 (1986), pp. 103–135.
[12] F. Brezzi and M. Fortin, Mixed and hybrid finite element
methods, Springer-Verlag,Berlin, 1991.
[13] L. Demkowicz and I. Babuška, p-interpolation error
estimates for edge finite ele-ments of variable order in two
dimension, SIAM J. Numer. Anal., 41 (2003), pp. 1195–1208.
[14] M. Dryja and O. B. Widlund, Schwarz methods of
Neumann-Neumann type forthree-dimensional elliptic finite element
problems, Comm. Pure Appl. Math., 48(1995), pp. 121–155.
[15] E. Gagliardo, Caratterizzazioni delle tracce sulla
frontiera relative ad alcune classidi funzioni in n variabili,
Rend. Sem. Mat. Univ. Padova, 27 (1957), pp. 284–305.
[16] P. Grisvard, Elliptic problems in non-smooth domains, vol.
24 of Monographs andStudies in Mathematics, Pitman, 1985.
[17] G. H. Hardy, J. E. Littlewood, and G. Pólya, Inequalities,
Cambridge Mathe-matical Library, Cambridge University Press,
Cambridge, 1988. Reprint of the 1952edition.
[18] J.-L. Lions, Théorèmes de trace et d’interpolation. IV,
Math. Ann., 151 (1963),pp. 42–56.
[19] J.-L. Lions and E. Magenes, Non-homogeneous boundary value
problems andapplications-I, vol. 181 of Die Grundlehren der
mathematischen Wissenschaften,Springer-Verlag, 1972.
[20] Y. Maday, Relèvements de traces polynomiales et
interpolations hilbertiennes entreespaces de polynômes, C. R.
Acad. Sci. Paris Sér. I Math., 309 (1989), pp. 463–468.
[21] V. G. Maz’ja, Sobolev spaces, Springer Series in Soviet
Mathematics, Springer-Verlag, Berlin, 1985. Translated from the
Russian by T. O. Shaposhnikova.
[22] R. Muñoz-Sola, Polynomial liftings on a tetrahedron and
applications to the h-pversion of the finite element method in
three dimensions, SIAM J. Numer. Anal., 34(1997), pp. 282–314.
[23] E. Sawyer, Weighted Lebesgue and Lorentz norm inequalities
for the Hardy operator,Trans. Amer. Math. Soc., 281 (1984), pp.
329–337.
[24] G. Sinnamon, A weighted gradient inequality, Proc. Roy.
Soc. Edin. Sect. A, 111(1989), pp. 329–335.
Mark Ainsworth, Department of Mathematics, Strathclyde
University, 26
Richmond St., Glasgow G1 1XH, Scotland.
E-mail address: [email protected]
Leszek Demkowicz, Institute for Computational Engineering and
Sciences,
201 E. 24th Street, The University of Texas at Austin, Austin TX
78712, USA.
E-mail address: [email protected]









![An Infinite Element for Maxwell's Equations Leszek Demkowicz … · 2011. 11. 30. · where g/(x) are approximated with continuous hp elements, see [12], and "V (r) = eik(r-l) ~ tl](https://img.pdfslide.us/doc/110x75/607ec868ec54cc3a7c25d1a9/an-infinite-element-for-maxwells-equations-leszek-demkowicz-2011-11-30-where.jpg)







![[Leszek Kolakowski] Metaphysical Horror(Bookos.org)](https://img.pdfslide.us/doc/110x75/55cf9deb550346d033afda70/leszek-kolakowski-metaphysical-horrorbookosorg.jpg)