Embed Size (px)
Citation preview

Interpolation
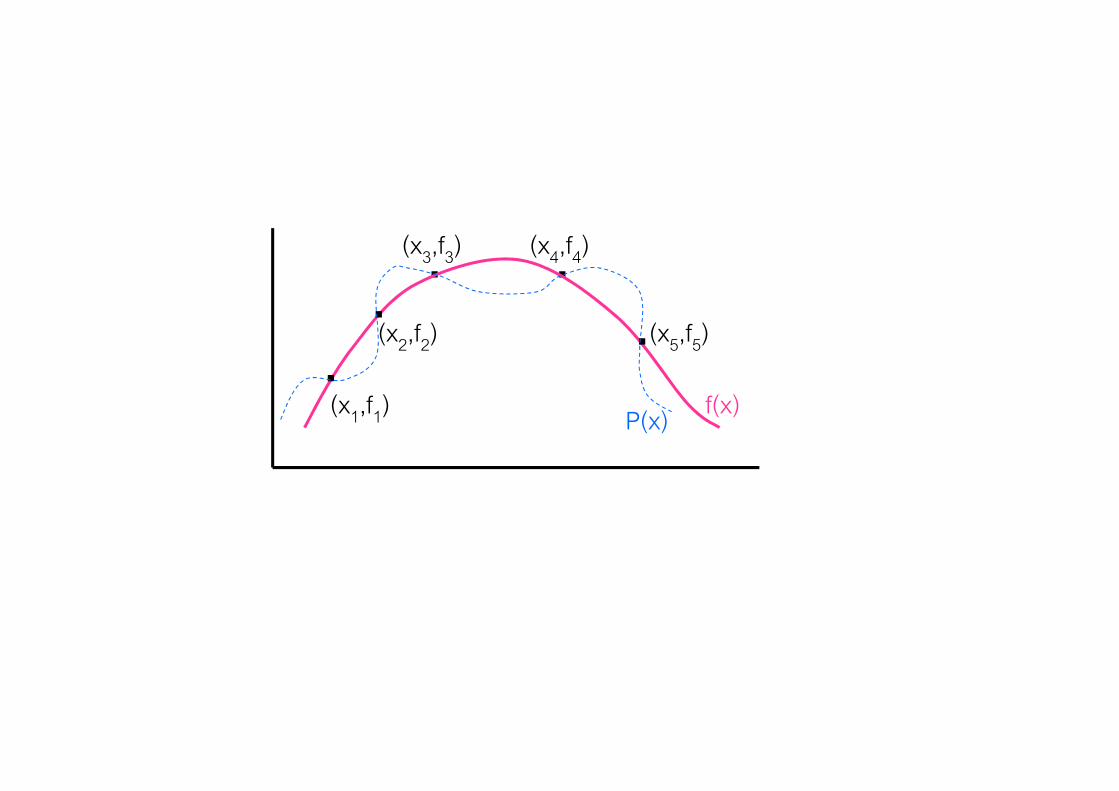
Lagrange Interpolation
. .
.. .
(x ,f )
(x2,f2)
(x3,f3) (x4,f4)
(x5,f5)
f(x).(x1,f1) P(x)
f(x)

Introduction• The interpolation problem
– Given values of an unknown function f(x) at values x = x0, x1, …, xn, find approximate values of f(x) between these given values
• Polynomial interpolation– Find nth-order polynomial pn(x) that approximates the function f(x) and
provides exact agreement at the n node points:
)()(),()(),()( 1100 nnnnn xfxpxfxpxfxp === L
– The polynomial pn(x) is unique
– Interpolation: evaluate pn(x) for x0 <= x <= xn
– Extrapolation: evaluate pn(x) for x0 > x > xn
)()(),()(),()( 1100 nnnnn xfxpxfxpxfxp === L
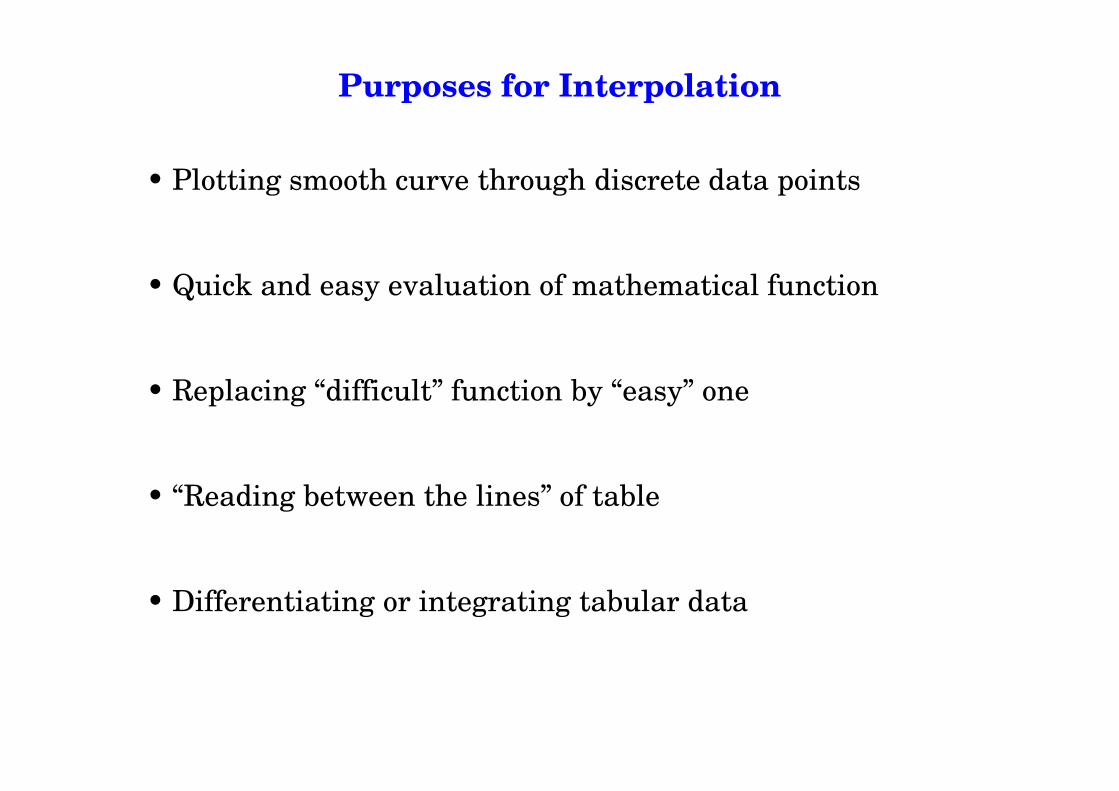
Purposes for Interpolation
• Plotting smooth curve through discrete data points
• Quick and easy evaluation of mathematical function
• Replacing “difficult” function by “easy” one• Replacing “difficult” function by “easy” one
• “Reading between the lines” of table
• Differentiating or integrating tabular data
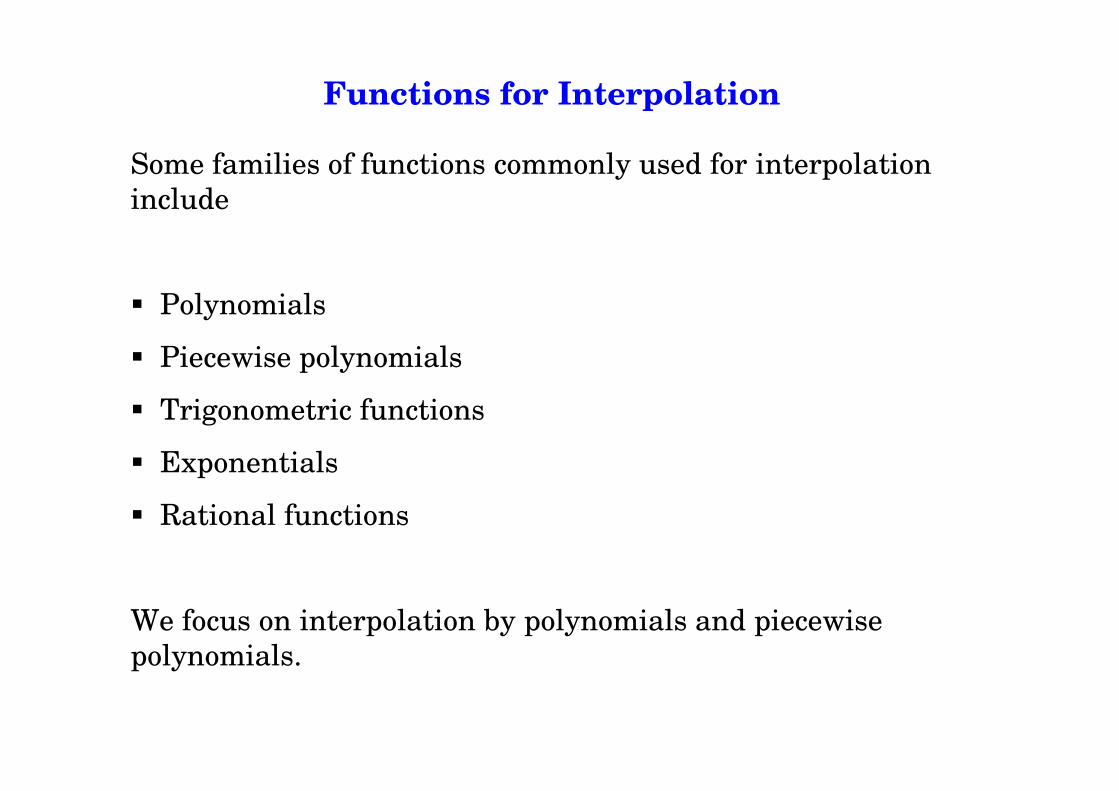
Functions for Interpolation
Some families of functions commonly used for interpolation
include
� Polynomials
� Piecewise polynomials
� Trigonometric functions� Trigonometric functions
� Exponentials
� Rational functions
We focus on interpolation by polynomials and piecewise
polynomials.

Polynomial Interpolation
)(...)()()( 2211 xuaxuaxuaxP mmm +++= )1(YAV =
V =
u x u x u x
u x u x u x
u x u x u x
n
n
n n n n
1 1 2 1 1
1 2 2 2 2
1 2
( ) ( ) ... ( )
( ) ( ) ... ( )
... ... ... ...
( ) ( ) ... ( )
Vandermonde matrix
n=m
miyxP iim ,...,2,1)( , ==A Y=
=
a
a
a
y
y
yn n
1
2
1
2
...,
...
YVA 1−=Extrapolation

Polynomial Interpolation
Simplest and commonest type of interpolation uses
polynomials.
Unique polynomial of degree at most n – 1 passes through n
data points (ti, yi), i = 1, . . . , n, where ti are distinct.
There are many ways to represent or compute polynomial, but
in theory all must give same result.in theory all must give same result.

Lagrange

Lagrange Interpolation
For given set of data points (ti, yi), i = 1, . . ., n,
Lagrange basis functions are given by
)x)...(xx)(xx)...(xx)(xx(x
)x)...(xx)(xx)...(xx)(xx(x(x)l
nj1jj1jj2j1j
n1j1j21
j −−−−−−−−−−
=+−
+−
)x(xn −
which means that matrix of linear system Ax = y is identity.
Thus, Lagrange polynomial interpolating data points (ti, yi) is
given by
pn–1 (t ) = y1l1 (t ) + y2l2 (t ) + ... + ynln (t ).
)x(x
)x(x
kj
kn
jk1,k −−
===π

Examples: Lagrange Interpolation
1-Use Lagrange interpolation to find interpolating polynomial
for three data points (–2, –27), (0, –1), 1, 0).
Lagrange polynomial of degree two interpolating three points
(t1, y1), (t2, y2), (t3, y3) is
.))(())(())((
)( 213
312
3212
tttty
tttty
ttttytp
−−−−+
−−−−+
−−−−= .
))(())(())(()(
23133
32122
312112 tttt
ytttt
ytttt
ytp−−
+−−
+−−
=
For this particular set of data, this becomes
.)1)(2(
)1)(2()1(
)12)(2(
)1(27)(2 −
−+−+−−−
−−= tttttp
2-Use Lagrange interpolation to find interpolating polynomial for
).sin()( xxf =
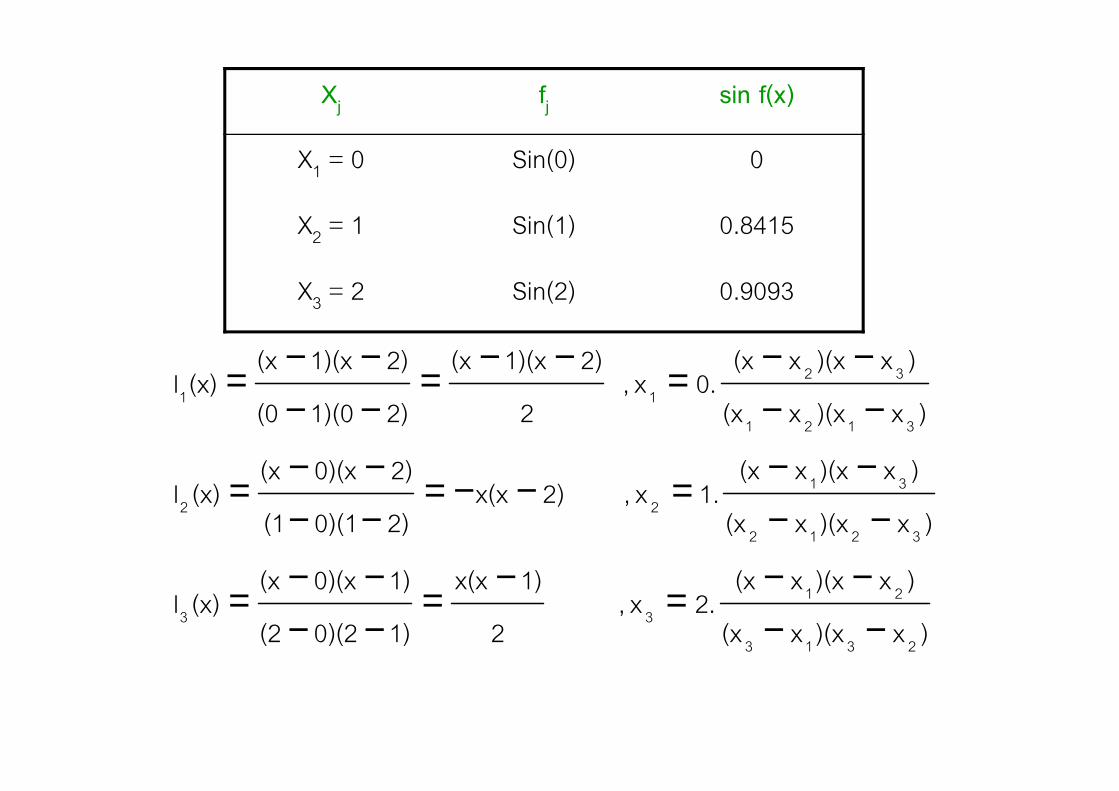
Lagrange InterpolationXj fj sin f(x)
X1 = 0 Sin(0) 0
X2 = 1 Sin(1) 0.8415
X3 = 2 Sin(2) 0.9093
)x)(xx(x
)x)(xx(x0.x,
2
2)1)(x(x
2)1)(0(0
2)1)(x(x(x)l 32
11 −−−−=−−=
−−−−=
)x)(xx(x
)x)(xx(x2.x,
2
1)x(x
1)0)(2(2
1)0)(x(x(x)l
)x)(xx(x
)x)(xx(x1.x, 2)x(x
2)0)(1(1
2)0)(x(x(x)l
)x)(xx(x0.x,
22)1)(0(0(x)l
2313
21
33
3212
31
22
3121
11
−−−−=−=
−−−−=
−−−−=−−=
−−−−=
−−==
−−=
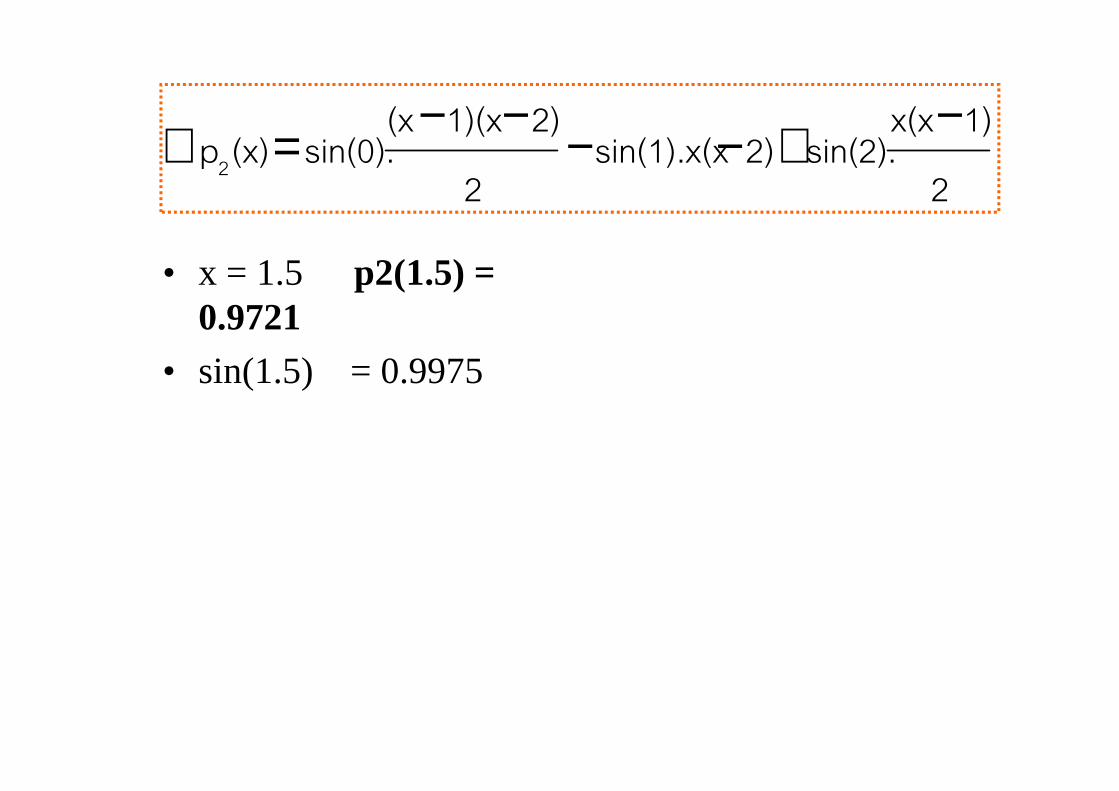
• x = 1.5 p2(1.5) =0.9721
• sin(1.5) = 0.9975
2
1)x(xsin(2).2)sin(1).x(x
2
2)1)(x(xsin(0).(x)p
2
−+−−−−=∴

Error in Interpolating a Function
If interpolation points are discrete sample of underlying
continuous function, then we may want to know how closely
interpolant approximates given function between sample
points.
If f is sufficiently smooth function, and pn–1 is unique
polynomial of degree at most n – 1 that interpolates f at n
points t1, . . . , tn, then points t1, . . . , tn, then
),())((!
)()()( 21
)(
1 n
n
n ttttttn
ftptf −−−=− − L
θ
where θ is some (unknown) point in interval [t1, tn].
Since point θ is unknown, this result is not particularly useful
unless we have bound on appropriate derivative of f, but it still
provides some insight into factors affecting accuracy of
polynomial interpolation.

• Take on and consider the error in linear interpolationto using nodes and satisfying
• We have:
Error in Interpolating a Function
( ) xexf = [ ]1.00x 1x
10 10 ≤≤≤ xx
( ) ( )( ) θexxxx
xPex
210
1−−
=−
( )xf
• 1-
• 2-
• We conclude
21
( )( ),
82
210
10
hxxxxMax
xxx=−−
≤≤
eeMaxxxx
=≤≤
θ
10
( ) eh
xPe x
8
2
1 =−
01 xxh −=

• Take on and consider the error in quadratic interpolationto using nodes satisfying
• We have:
Error in Interpolating a Function
( ) xexf = [ ]1.0( )xf 210 xandx,x
10 210 ≤≤≤≤ xxx
( ) ( )( )( ) θ2102
x e3!
xxxxxxxPe
−−−=−
• 1-
• 2-
• We conclude
eeMaxxxx
=≤≤
θ
10
3!( )( )( )
396
3210
10
hxxxxxxMax
xxx=
−−−≤≤
( ) 33
2 174.039
heh
xPe x ==−
0112 xxxxh −=−=
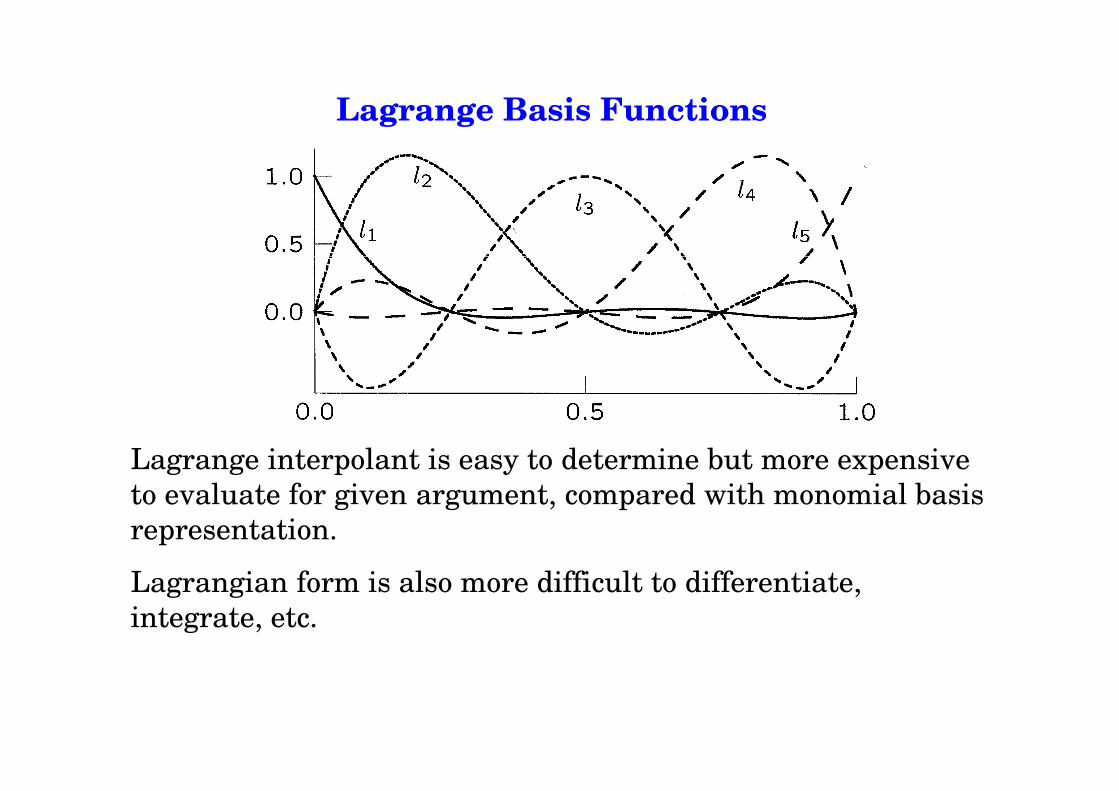
Lagrange Basis Functions
Lagrange interpolant is easy to determine but more expensive
to evaluate for given argument, compared with monomial basis
representation.
Lagrangian form is also more difficult to differentiate,
integrate, etc.
Review and Discussion
• In Lagrange interpolation polynomial, it always go through given points.
Think with equation below
The Lagrange form of polynomial is
32313
212
3212
311
3121
32
))((
))((
))((
))((
))((
))(()( y
xxxx
xxxxy
xxxx
xxxxy
xxxx
xxxxxp
−−−−+
−−−−+
−−−−=
The Lagrange form of polynomial is convenient when the same abscissas may occur in different applications.
• It is less convenient than the Newton form when additional data points may be added to the problem.
Newton
• Newton form of the equation of a straight line passing through two points (x1, y1) and (x2, y2) is
• Newton form of the equation of a parabola passing throughthree points (x, y ), (x , y ), and (x, y ) is
Newton Interpolation Polynomials
)()( 121 xxaaxp −+=
throughthree points (x1, y1), (x2, y2), and (x3, y3) is
• the general form of the polynomial passing through n points (x1, y1), …,(xn, yn) is
))(()()( 213121 xxxxaxxaaxp −−+−+=
))...((...))(()()( 11213121 −−−++−−+−+= nn xxxxaxxxxaxxaaxp
• Substituting (x1, y1) into
•Substituting (x2, y2) into
Newton Interpolation Polynomials (cont’d)
))(()( 213121 xxxxaxxaay −−+−+=
))(()( 213121 xxxxaxxaay −−+−+=
))...((...))(()()( 11213121 −−−++−−+−+= nn xxxxaxxxxaxxaaxp
11 ya =
•Substituting (x2, y2) into
•Substituting (x3, y3) into
))(()( 213121 xxxxaxxaay −−+−+=
))(()( 213121 xxxxaxxaay −−+−+=
12
122 xx
yya
−−=
13
12
12
23
23
3 xx
xx
yy
xx
yy
a−
−−−
−−
=
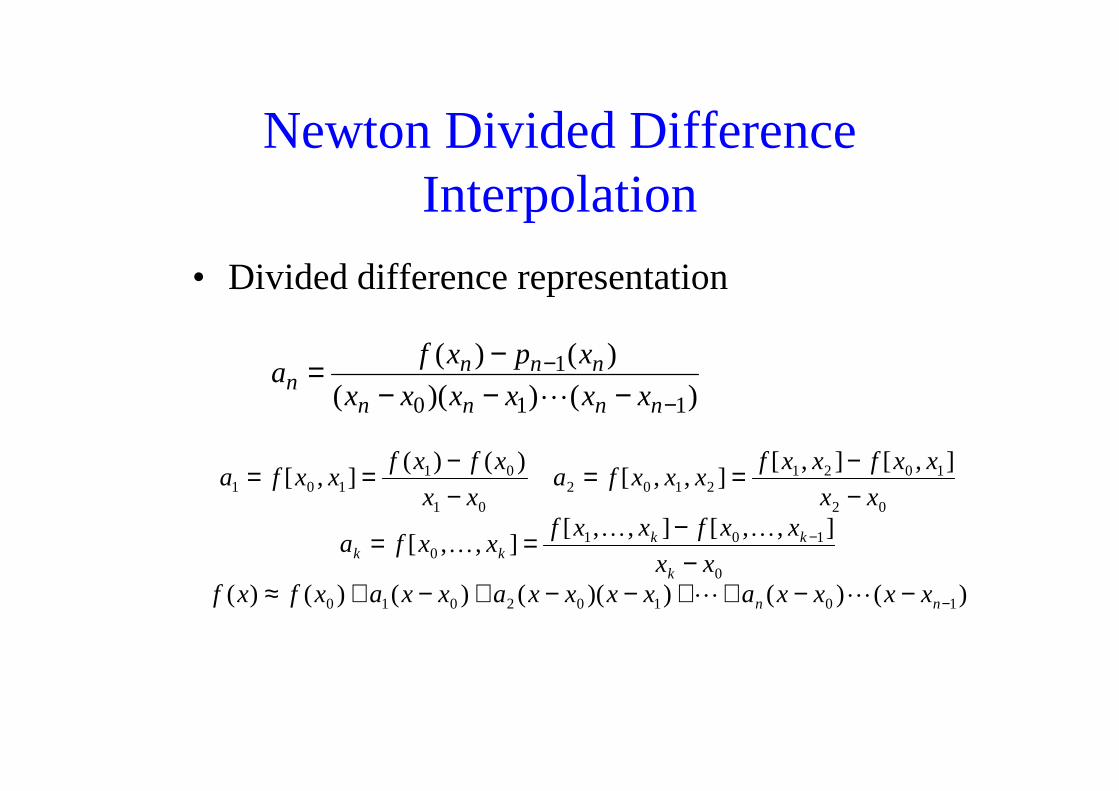
Newton Divided Difference Interpolation
• Divided difference representation
)())((
)()(
110
1
−
−−−−
−=nnnn
nnnn xxxxxx
xpxfa
L )())(( 110 −−−− nnnn xxxxxx L
)()())(()()()(
],,[],,[],,[
],[],[],,[
)()(],[
10102010
0
1010
02
10212102
01
01101
−
−
−−++−−+−+≈−
−==
−−==
−−==
nn
k
kkkk
xxxxaxxxxaxxaxfxfxx
xxfxxfxxfa
xx
xxfxxfxxxfa
xx
xfxfxxfa
LL
KKK
General form
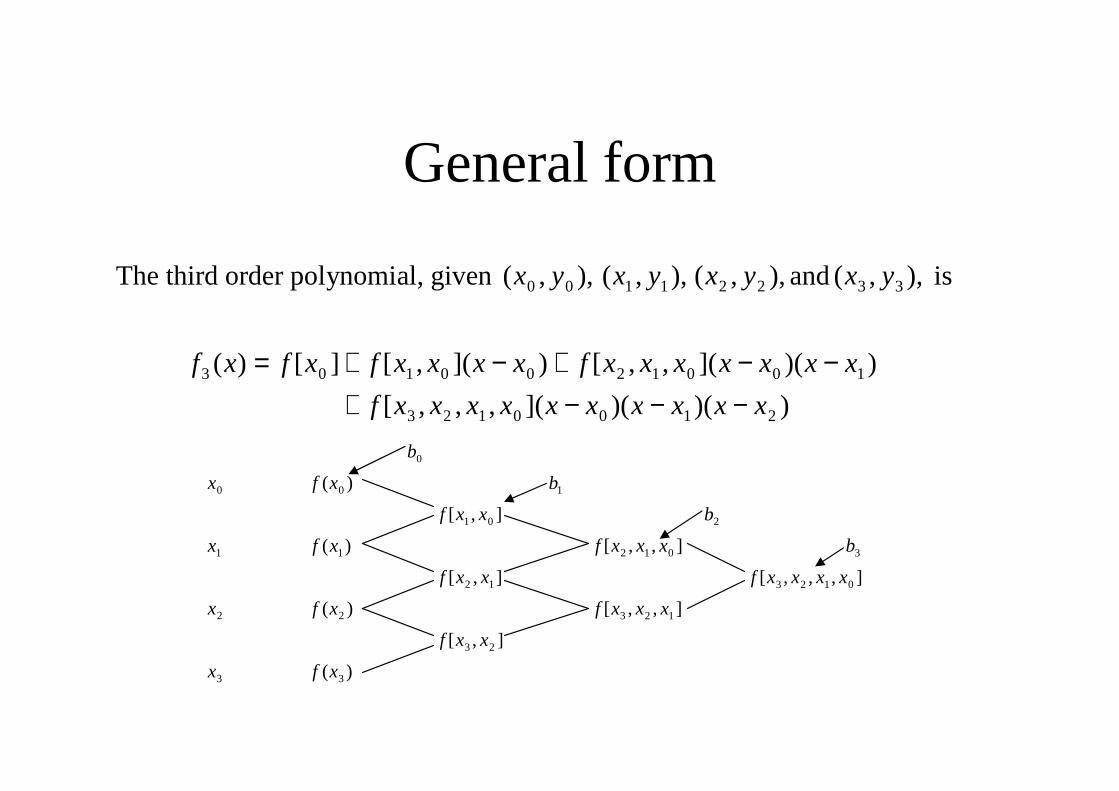
The third order polynomial, given ),,( 00 yx ),,( 11 yx ),,( 22 yx and ),,( 33 yx is
))()(](,,,[
))(](,,[)](,[][)( 1001200103
xxxxxxxxxxf
xxxxxxxfxxxxfxfxf
−−−+−−+−+=
))()(](,,,[ 2100123 xxxxxxxxxxf −−−+
0b
0x )( 0xf 1b
],[ 01 xxf 2b
1x )( 1xf ],,[ 012 xxxf 3b
],[ 12 xxf ],,,[ 0123 xxxxf
2x )( 2xf ],,[ 123 xxxf
],[ 23 xxf
3x )( 3xf

Newton Interpolation• Passing through the points (x1, y1)=(-2, 4),
(x2, y2)=(0, 2), and (x3, y3)=(2, 8).
• The equations is
• Where the coefficients are
)0))(2(())2(()( 321 −−−+−−+= xxaxaaxp
411 == ya
42−− yy• Where the coefficients are
•thus
1)2(0
42
12
122 −=
−−−=
−−=
xx
yya
1)2(2
)2(042
0228
13
12
12
23
23
3 =−−
−−−−
−−
=−
−−−
−−
=xx
xx
yy
xx
yy
a
2)2()2(4)( 2 ++=+++−= xxxxxxp

Newton Interpolation
• Passing through the points (x1, y1)=(-2, 4), (x2, y2)=(0, 2), and (x3, y3)=(2, 8).
))(()()( 213121 xxxxaxxaaxp −−+−+=
2)2()2(4)( 2 ++=+++−= xxxxxxp

Additional Data Points• We extend the previous example, adding the points(x4, y4) = (-1, -1) and (x5, y5) = (1, 1)
• Divided-difference • Divided-difference
table becomes
(with new entries
shown in bold)
• Newton interpolation
polynomial is )1)(2)(2()2)(2()2()2(4)( +−++−+−+++−= xxxxxxxxxxxp

Interpolating a Function
If interpolation points are discrete sample of underlying
continuous function, then we may want to know how closely
interpolant approximates given function between sample
points.
If f is sufficiently smooth function, and pn–1 is unique
polynomial of degree at most n – 1 that interpolates f at n
points t1, . . . , tn, then points t1, . . . , tn, then
),())((!
)()()( 21
)(
1 n
n
n ttttttn
ftptf −−−=− − L
θ
where θ is some (unknown) point in interval [t1, tn].
Since point θ is unknown, this result is not particularly useful
unless we have bound on appropriate derivative of f, but it still
provides some insight into factors affecting accuracy of
polynomial interpolation.

ExampleThe upward velocity of a rocket is given as a function of time in Table 1. Find the velocity at t=16 seconds using the Newton Divided Difference method for cubic interpolation.
t v(t)t v(t)
s m/s
0 0
10 227.04
15 362.78
20 517.35
22.5 602.97
30 901.67
Table 1: Velocity as a function of time
Figure 2: Velocity vs. time data for the rocket example
Example
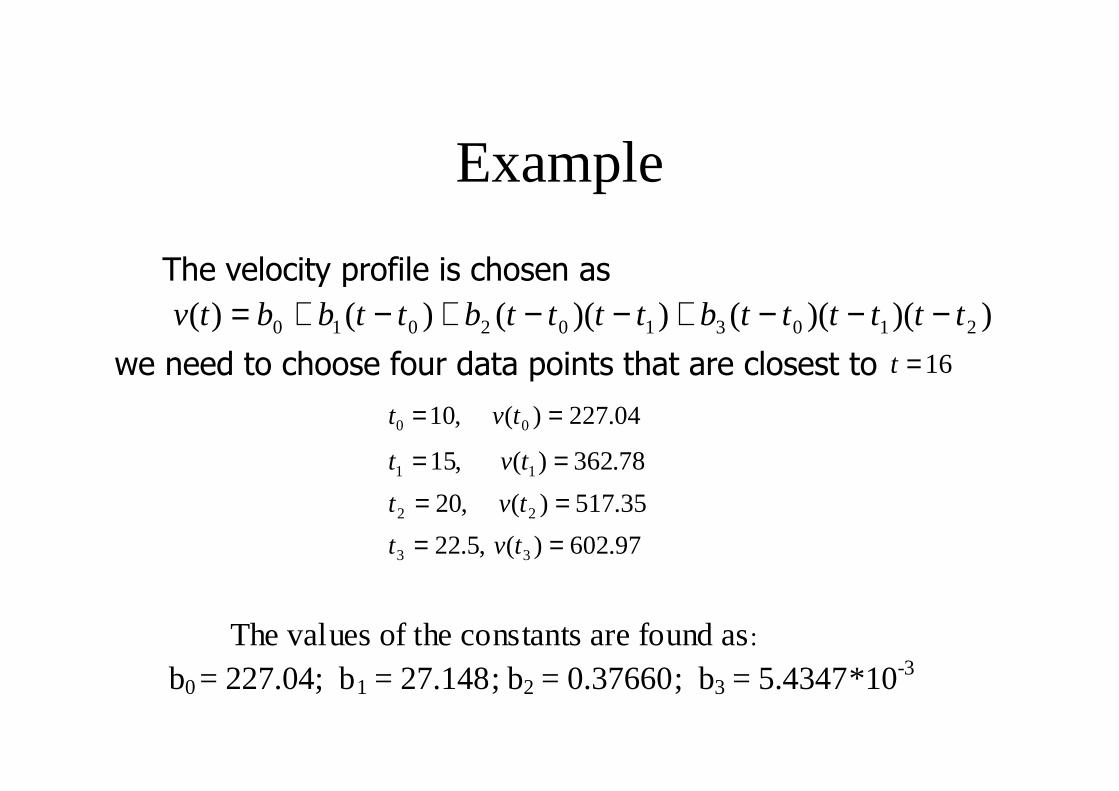
The velocity profile is chosen as
))()(())(()()( 2103102010 ttttttbttttbttbbtv −−−+−−+−+=we need to choose four data points that are closest to 16=t
,100 =t 04.227)( 0 =tv
,151 =t 78.362)( 1 =tv ,202 =t 35.517)( 2 =tv ,5.223 =t 97.602)( 3 =tv
The values of the constants are found as: b0 = 227.04; b1 = 27.148; b2 = 0.37660; b3 = 5.4347*10-3
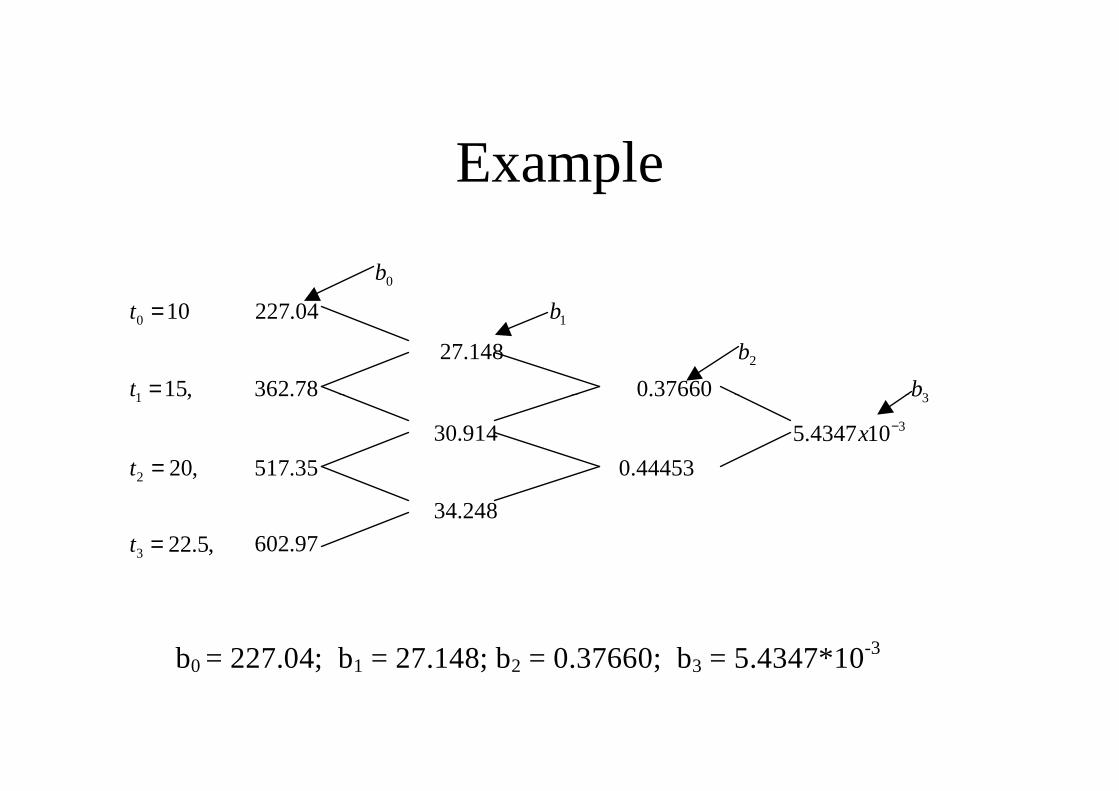
Example
0b
100 =t 04.227 1b
148.27 2b
,151 =t 78.362 37660.0 3b
b0 = 227.04; b1 = 27.148; b2 = 0.37660; b3 = 5.4347*10-3
,151 =t 78.362 37660.0 3b
914.30 3104347.5 −x
,202 =t 35.517 44453.0
248.34
,5.223 =t 97.602
Example
Hence
))()(())(()()( 2103102010 ttttttbttttbttbbtv −−−+−−+−+=
)20)(15)(10(10*4347.5
)15)(10(37660.0)10(148.2704.2273 −−−+
−−+−+=− ttt
ttt
At ,16=t At ,16=t
)2016)(1516)(1016(10*4347.5
)1516)(1016(37660.0)1016(148.2704.227)16(3 −−−+
−−+−+=−
v
06.392= m/s
The absolute relative approximate error a∈ obtained is
a∈ 100x06.392
19.39206.392 −=
= 0.033427 %

High-Degree Polynomial Interpolation
Interpolating polynomials of high degree are expensive to
determine and evaluate.
In some bases, coefficients of polynomial may be poorly
determined due to ill-conditioning of linear system to be solved.
High-degree polynomial necessarily has lots of “wiggles,” which
may bear no relation to data to be fit.may bear no relation to data to be fit.
Polynomial goes through required data points, but it may
oscillate wildly between data points.

Placement of Interpolation Points
Equally spaced interpolation points often yield unsatisfactory
results near ends of interval.
If points are bunched near ends of interval, more satisfactory
results are likely to be obtained with polynomial interpolation.
One way to accomplish this is to use Chebyshev points
)12( k = −−= π,,...,1,
2
)12(cos nk
n
ktk =
−−= π
on interval [–1, 1], or suitable transformation of these points
to arbitrary interval.
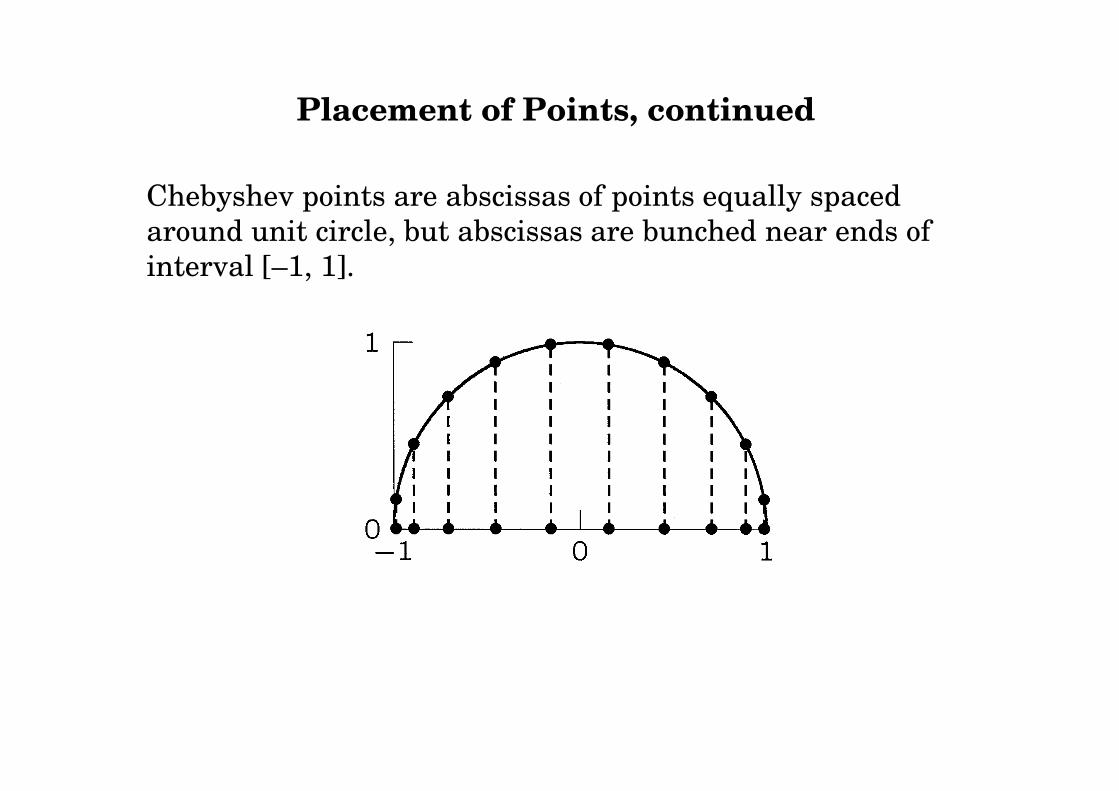
Placement of Points, continued
Chebyshev points are abscissas of points equally spaced
around unit circle, but abscissas are bunched near ends of
interval [–1, 1].
![New Iterative Methods for Interpolation, Numerical ... · and Aitken’s iterated interpolation formulas[11,12] are the most popular interpolation formulas for polynomial interpolation](https://img.pdfslide.us/doc/110x75/5ebfad147f604608c01bd287/new-iterative-methods-for-interpolation-numerical-and-aitkenas-iterated-interpolation.jpg)