Embed Size (px)
Citation preview

International Journal of Plasticity 83 (2016) 153e177
Contents lists available at ScienceDirect
International Journal of Plasticity
journal homepage: www.elsevier .com/locate / i jp las
A three-dimensional finite-strain phenomenological modelfor shape-memory polymers: Formulation, numericalsimulations, and comparison with experimental data
Elisa Boatti*, Giulia Scalet, Ferdinando AuricchioDepartment of Civil Engineering and Architecture, University of Pavia, Via Ferrata 3, 27100 Pavia, Italy
a r t i c l e i n f o
Article history:Received 14 October 2015Received in revised form 14 March 2016Available online 27 April 2016
Keywords:A. Phase transformationA. Thermomechanical processesB. Constitutive behaviorB. Finite strainShape-memory polymers
* Corresponding author.E-mail address: [email protected] (E. Boatti).
http://dx.doi.org/10.1016/j.ijplas.2016.04.0080749-6419/© 2016 Elsevier Ltd. All rights reserved.
a b s t r a c t
Shape-memory polymers (SMPs) represent a class of smart materials able to store atemporary shape and to recover the original shape upon an external stimulus, such astemperature. The present paper proposes a three-dimensional finite-strain phenomeno-logical model for thermo-responsive SMPs, which distinguishes between two materialphases presenting different properties and is based on a rule of mixtures. The proposedmodel is motivated by the earlier work of Reese et al. (2010) and it considers severalsignificant material features that had not been addressed in previous phenomenologicalapproaches. Specifically, the model reproduces both heating-stretching-cooling and colddrawing shape-fixing procedures and it takes into account the non-ideal behavior ofrealistic SMPs (i.e. imperfect shape-fixing and incomplete shape-recovery). Several nu-merical tests are reported to assess model performances, from simple uniaxial and biaxialtests to complex simulations of biomedical devices. Comparisons with experimental datataken from the literature are also provided to validate the model. The proposed im-provements increase the model applicability over a wide range of polymer types andoperating conditions.
© 2016 Elsevier Ltd. All rights reserved.
1. Introduction
Shape-memory polymers (SMPs) are a class of smart materials able to store a temporary shape and to recover their original(permanent, or parent) shape upon an external stimulus. The permanent shape is given to the polymer during processing (e.g.injection molding and extrusion) and is determined by the crosslinks (i.e. the junctions) in the macromolecular network,which are not affected by variations of the external environment conditions; on the other hand, the temporary shape is adeformation imposed to the material and retained, thanks to specific physical or chemical links depending on the polymertype (Leng and Du, 2010).
Shape recovery in SMPs can be induced by different mechanisms, e.g. by thermal, electrical, chemical (through immersionin water or other solvent), electro-magnetic stimuli, or by light, and it results from the combination of polymer structure andmorphology, together with the applied processing and programming technology (Lendlein and Kelch, 2002). The mostcommon are thermo-responsive SMPs, for which the shape change is caused by a temperature variation (Xie, 2011). The

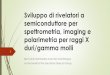
Fig. 1. High-temperature shape-fixing and recovery upon heating.
E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177154
associated behavior, called thermally-induced shape-memory effect, is correlated to a switching transition temperaturewhich depends on the polymer type; particularly, the SMP type is chosen according to the temperature range expected for theapplication (Chen and Lagoudas, 2008a,b).
At higher temperatures than the transition range, the macromolecular chains of the polymer can undergo large randomconformational motions and the interaction between neighboring chains is negligible, so that the material stiffness is low, therelaxation time is short, and the material state is dominated by entropy. As the temperature decreases, the motion of themacromolecular chains is increasingly reduced, so that only local intermolecular interactions occur; in such conditions, thematerial stiffness is high, the relaxation time is much longer, and the material state is dominated by internal energy (Liu et al.,2006; Lendlein, 2010; Xiao et al., 2013).
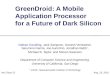
The typical shape-memory cycle in thermo-responsive SMPs generally consists of a shape-fixing (or shape-programming)procedure, followed by a shape-recovery upon heating. Particularly, two types of shape-fixing protocols can be performed(Lendlein and Kelch, 2002; Lendlein, 2010): (i) a heating-stretching-cooling process or (ii) a cold drawing; in the following, werefer to such protocols as high-temperature and low-temperature shape-fixing, respectively. In the case of a shape-memorycycle with high-temperature shape-fixing, the material is first heated above the transition temperature range, thendeformed, cooled while keeping the constraint to maintain the deformed shape, and finally re-heated, after the constraintrelease, to recover the original shape (see Fig. 1). In the case of a shape-memory cycle with low-temperature shape-fixing, thepolymer is first deformed while at lower temperatures than the transition range, then unloaded, and finally heated to recoverthe original shape (see Fig. 2). The high-temperature shape-fixing is the most common procedure and is applied, for instance,to polyurethane-based polymers (Rodriguez et al., 2014); however, for practical applications, such as large structures, theprogramming of the material at very high temperature may become a lengthy, labor-intensive, and energy-consumingprocess (Li and Xu, 2011). Therefore, the low-temperature shape-fixing is advantageous since it does not require an addi-tional heating-cooling step to achieve the temporary shape (Rabani et al., 2006). It is performed on polymers with suitedmechanical properties at low temperatures (e.g., a low modulus at room temperature to ensure deformation by cold-drawing), such as poly(DL-lactic acid)-based poly(urethane urea) SMPs (Tang et al., 2013) or poly(ε-caprolactone) poly-urethane SMPs (Li and Xu, 2011).
SMPs can be classified according to their shape-fixing and shape-recovery abilities (Liu et al., 2007), as displayed in Fig. 3,where schematic shape-memory cycles are shown in extension (or strain) versus temperature diagrams. For an ideal material,the recovery happens exactly in correspondence of a single temperature value, so that the recovery curve is sharp, as shown inFig. 3(a). In reality, the recovery is not instantaneous and takes place over a wider temperature range, so that the recoverycurve is smooth, as represented in Fig. 3(b). If the shape-fixing is not ideal, a certain amount of deformationwill be “lost” uponunloading (see Fig. 3(c)); if the shape-recovery is not ideal, the original shape will not be recovered completely (see Fig. 3(d)).Imperfect shape-fixing and incomplete shape recovery can also take place together. Experimental evidences showingimperfect shape-fixity and incomplete shape-recovery in SMPs can be found, for instance, in Tobushi et al. (2001, 2006); Volket al. (2011). As an example, researches on the long-term characteristics of polyurethane SMP foams reported that the shape-fixity and shape-recovery become imperfect (Tobushi et al., 2004).
Fig. 2. Low-temperature shape-fixing and recovery upon heating.

Fig. 3. Classification of SMPs by their shape-fixing and shape-recovery abilities. The point S identifies the starting point of the cycle. (a) Ideal SMP. (b) Non-idealSMP, with perfect shape-fixing and complete shape-recovery, but finite sharpness of the recovery curve. (c) Non-ideal SMP, with imperfect shape-fixing andcomplete shape-recovery. (d) Non-ideal SMP, with perfect shape-fixing and incomplete shape-recovery. Figure inspired to Liu et al. (2007).
E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177 155
Thanks to their peculiar features, SMPs are widely exploited in advanced applications (Leng and Du, 2010). As an example,SMPs are currently utilized for heat-shrinkable tubes, wraps, foams, self-adjustable utensils, biomedical devices, deployablespace structures, microsystems, smart sensors and actuators (Hager et al., 2015; Yahia, 2015). SMPs present, in fact, severaladvantages compared to other shape-memory materials, such as lower cost and easier manufacturing process, with aconsequent higher possibility of creating devices with complex geometries, material low density, and possible biodegrad-ability (Liu et al., 2006). Moreover, although SMPs present lower recovery stresses, they display higher recoverable de-formations (more than 200%) than those displayed by shape-memory alloys (up to 8%) (Liu et al., 2007).
The increasing interest and employment of SMPs in the design of innovative devices motivates a deep investigation of thematerial behavior as well as the introduction of effective constitutive models. Indeed, such a research is currently an activefield, since material behavior varies considerably due to the vast range of polymer types (Hu et al., 2012). Several worksavailable from the literature present experimental campaigns, e.g. Baer et al. (2007); Tobushi et al. (2001); Liu et al. (2006);Volk et al. (2011); Pandini et al. (2012); Sujithra et al. (2015); Park et al. (2016) and noticeable progress has beenmade over thelast decades in terms of constitutive modeling, from earlier simple stressestrain relationships and descriptions of shape-memory processes (Pakula and Trznadel, 1985) to recent complex structure analyses at different levels (Popa et al., 2014;Krairi and Doghri, 2014).
Several models have been developed for thermo-responsive SMPs; see Hu et al. (2012) for a review. In the literature twomain approaches are used to describe the behavior of thermo-responsive SMPs (Diani et al., 2006). The first approach is basedon the concept of phase transition: the material is assumed to be softer (lower Young's modulus) at high temperature andharder at low temperature; often, the high-temperature state is referred to as “rubbery” phase and the low-temperature stateis called “glassy” phase. During the phase transition a fraction of the material is in the glassy state while the remainder is inthe rubbery state. Internal variables and constraints are used to describe the transition between the two phases, see, e.g., Liuet al. (2006); Reese et al. (2010); Baghani et al. (2012, 2014); Xu and Li (2010); Qi et al. (2008); Barot et al. (2008); Chen andLagoudas (2008a,b); Kim et al. (2010); Westbrook et al. (2010); Moon et al. (2015); Yang and Li (2015); Naghdabadi et al.(2012); Gu et al. (2015); in particular, a rule of mixtures is generally introduced. The second approach is based on the

E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177156
linear viscoelastic models commonly used to simulate standard polymer behavior; see, e.g. Abrahamson et al. (2003); Dianiet al. (2006); Ghosh and Srinivasa (2011, 2013); Lion et al. (2010); Nguyen et al. (2008, 2010); Tobushi et al. (1997); Westbrooket al. (2011); Xiao et al. (2013).
As discussed in Lendlein (2010) and J€ackle (1986), the phase-transition approach is a phenomenological assumptionwhichdoes not consider the real microscopic thermoviscoelastic phenomena occurring during the glass transition. It is merelybased on the observation that the mechanical behavior of polymeric materials is strongly temperature-dependent: anamorphous SMP can be very stiff at low temperatures (below the glass transition range) while it can present rubber-likeproperties at high temperatures (Liu et al., 2006).
Therefore, the first-approach models reproduce the overall macroscopic behavior of SMPs, while the second-approachmodels describe the underlying mechanisms of the shape-memory effect, based on the temperature-dependence of themolecular mobility and of the relaxation time. The choice of the model to use depends on the amount of details needed toaccurately describe the material response, in relation to the investigated application. The applicability of the models based onthe first approach is usually limited to situations where the interest in the macroscopic behavior of the SMP material ispredominant. However, such an approach displays a great flexibility in adapting the existing constitutive models to describethe shape-memory effect (Lendlein, 2010) and has been often successfully applied to fit experimental data and to simulateSMP devices (e.g. in Liu et al. (2006), Westbrook et al. (2010) and Baghani et al. (2014)). For these reasons, the first-approachmodels can be the most efficient route in engineering applications, especially considering that they are usually less expensivein terms of computational time compared to the second-approach models.
Motivated by the above considerations and following the line of the first-approach models discussed above, the presentpaper aims to introduce a constitutive model for thermo-responsive SMPs. We start from the consideration that, to properlydescribe the shape-memory behavior of SMPs, a constitutive model should (i) be introduced within a thermodynamicallyconsistent mathematical framework; (ii) be formulated in a three-dimensional setting to allow its application to a broadvariety of problems; (iii) be developed in a finite-strain setting, since a fundamental feature of SMPs is their capability toundergo very large deformations; (iv) consider the peculiar thermomechanical features of SMPs, since temperature plays akey role in shape-fixing and shape-recovery.
The proposed model satisfies all the listed requirements and is motivated by the earlier work of Reese et al. (2010), whointroduced a three-dimensionalmodel and an effective algorithm to simulate SMP behavior in various situations. Accordingly,the model is based on a phenomenological description of SMP behavior, considering a rubbery phase stable at temperaturesabove the transition range, and a glassy phase stable at temperatures below the transition range. A rule of mixtures isintroduced to describe the free energy distribution of the two phases.
The novelty of the proposed approach is the inclusion in the modeling formulation of several material features that aresignificant from the application point of view and that have not been addressed to date. Specifically, the model reproducesboth high-temperature and low-temperature shape-fixing, differently from Reese et al. (2010) where only high-temperatureshape-fixing is considered, and it takes into account the non-ideal behavior of real SMPs (i.e. imperfect shape-fixity andincomplete shape-recovery), which is not considered in Reese et al. (2010). To this purpose, we introduce additional tensorialand scalar quantities to reproduce the cited features. Thanks to the just mentioned novelties with respect to Reese et al.(2010), the proposed model becomes more general and, therefore, it can be adapted to describe the behavior of a widerange of polymer types and operating conditions. As a further advantage of the proposed model, we emphasize that itpresents a low number of material parameters, which can be derived from intuitive physical considerations. Moreover, themodel can reproduce the overall SMP behavior using a relatively simple solution algorithm, thus entailing a low computa-tional effort. We therefore believe that the proposed model and its related algorithm can be effectively used for engineeringpurposes, where the main macroscopic behavior of thermo-responsive SMPs needs to be reproduced.
In the present paper, after the description of the model, its performances are assessed through several numerical testsranging from uniaxial and biaxial tests to complex simulations of biomedical devices. Moreover, model validation is per-formed through a comparisonwith two sets of experimental data taken from the literature (Gall et al., 2004; Volk et al., 2011).
The paper is organized as follows. Section 2 and 3 present the proposed constitutive model in a time-continuous and time-discrete setting, respectively. Then, Section 4 describes the performed numerical simulations and the comparison withexperimental data from the literature. Finally, conclusions are given in Section 5.
2. Time-continuous model formulation
This section addresses a three-dimensional phenomenological model for thermo-responsive SMPs, along the lines of thework by Reese et al. (2010).
2.1. State and internal variables
In the framework of macroscopic modeling and of finite-strain continuum mechanics, we assume the total deformationgradient F and temperature q as state variables. The right CauchyeGreen strain tensor and the GreeneLagrange strain tensorare then, respectively, defined as:

E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177 157
C ¼ FTF (1)
E ¼ C� 1
2(2)
where 1 is the second-order identity tensor.As mentioned in Section 1, the model aims to reproduce the shape-fixing and shape-recovery due to reversible state
changes between the glassy and rubbery phases as well as to include, as a novelty, the description of both high-temperatureand low-temperature shape-fixing and of the non-ideal behavior of realistic SMPs (i.e. imperfect shape-fixity and incompleteshape-recovery). In fact, since realistic SMPmaterials often display an imperfect shape-fixity and/or a limited shape-recovery,it becomes important to include such a behavior in thematerial response description. To this purpose, we propose to interpretthe thermomechanical behavior of SMPs from a phenomenological viewpoint by exploiting the principles of continuumthermodynamics with internal variables, without explicitly incorporating details on the molecular interactions. We thereforeintroduce scalar and tensorial variables in the model formulation, as described in the following. We now provide a summaryof the adopted variables and of their physical meaning.
As previously mentioned, we distinguish between a glassy and a rubbery phase: the first one stable at temperatures belowthe transition temperature, the second one stable at temperatures above the transition temperature. In the following, weadopt superscripts “g” and “r” to indicate the glassy and rubbery phase, respectively.
The volume fractions of the glassy and rubbery phases are represented by the scalar variables zg and zr, respectively, suchthat zg,zr2[0,1] and zgþzr¼ 1. Thanks to this last constraint, the model restricts itself to just one independent volume fraction,zg, letting zr¼ 1�zg.
We assume that the total deformation gradient F is the same for both rubbery and glassy phase, such that:
F ¼ Ftg ¼ Ftr (3)
where Ftg is the total deformation gradient of the glassy phase and Ftr is the total deformation gradient of the rubbery phase.To simulate the high-temperature shape-fixing, we introduce the frozen deformation gradient Ff, i.e. the amount of
temporary deformation which is stored during the high-temperature shape-fixing. This choice is motivated by the fact thatthe deformation induced by the high-temperature loading can be stored temporarily (i.e. “frozen”) at low temperatures byemerging molecular interactions; it can be released only when such interactions disappear upon subsequent heating over thetransition temperature (Liu et al., 2006). To model the storage of Ff, we propose a local multiplicative decomposition of thetotal deformation gradient Ftg into an active glassy phase contribution and a frozen contribution, respectively Fg and Ff.Therefore, we obtain:
Ftg ¼ F ¼ FgFf (4)
It can be observed that the deformation gradient in the glassy phase, Fg, can be easily derived once given F and Ff.In the following, we adopt an elastoplastic behavior for the active glassy phase. Following a well-established approach
(Bonet and Wood, 2008), we assume a local multiplicative decomposition of the mechanical deformation gradient of theglassy phase, Fg, into an elastic part Feg, defined with respect to an intermediate configuration, and a plastic part Fpg, definedwith respect to the reference configuration. Accordingly,
Fg ¼ FegFpg (5)
To reproduce the low-temperature shape-fixing procedure, and the subsequent shape-recovery (see Fig. 2), we employ theplastic deformation gradient of the glassy phase, Fpg. In fact, experimental tests, e.g. Scalet et al. (2015), show typical elas-toplastic stressestrain curves for the glassy phase, with a (partially) recoverable plastic deformation accumulated during low-temperature shape-fixing. An appropriate evolution equationwill be proposed in Subsection 2.4 to reproduce the recovery ofsuch deformation.
To simulate the imperfect shape-fixing, we introduce a positive material parameter c governing the evolution of the frozendeformation gradient Ff. Particularly, in case of perfect shape-fixing all the applied deformation is stored, i.e. Ff¼ F (andtherefore Fg¼ 1) in Eq. (4); further details about the evolution of Ff will be provided in Subsection 2.4.
Finally, to reproduce the incomplete shape-recovery, we introduce the permanent deformation gradient Fp, taking intoaccount the amount of applied deformationwhich is not recovered through heating. A furthermultiplicative decomposition isconsidered for the total deformation gradient Ftr¼ F, into an active rubbery phase contribution and an irrecoverablecontribution, as follows:
Ftr ¼ F ¼ FrFp (6)

E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177158
It can be observed that the deformation gradient in the rubbery phase, Fr, can be easily derived once given F and Fp.We assume a hyperelastic behavior for the rubbery phase, i.e. themechanical deformation gradient in the rubbery phase Fr
coincides with the elastic part Fer, as commonly accepted in the literature, e.g. Ge et al. (2014).Thanks to the adopted variables, the model is able to describe the classical shape-memory behavior of SMPs, as also
demonstrated by the numerical simulations presented in Section 4.While the model by Reese et al. (2010) can only reproducean ideal shape-memory behavior, the proposed model includes the possibility to simulate both imperfect shape-fixity andincomplete shape-recovery and is therefore more realistic. Moreover, the introduction of the plastic deformation gradient inthe glassy phase allows to simulate the low-temperature shape-fixing, again extending the model by Reese et al. (2010).
2.2. Helmholtz free-energy function
The Helmoltz specific free energy J is determined by employing the rule of mixtures, considering that the material is acombination of rubbery and glassy phases. In particular, we set:
J ¼ zgJg þ ð1� zgÞJr (7)
where Jg ¼ JgðFeg; Fpg ; qÞ and Jr ¼ JrðFer ; qÞ are the free energies of the glassy and rubbery phases, respectively.Accordingly to our assumptions on the behavior of the glassy and rubbery phases (see Subsection 2.1), we define the free-
energy contributions as follows:
Jg ¼ Jeg þJpg þJgth þJg
ref (8)
Jr ¼ Jer þJrth þJr
ref (9)
where Jeg ¼ JegðFegÞ and Jer ¼ JerðFerÞ are the elastic contributions of the glassy and rubbery phases respectively, whileJpg ¼ JpgðFpgÞ is the plastic contribution of the glassy phase; Ji
th ¼ JithðFi; qÞ ði ¼ g; rÞ is the specific free energy related to
thermal expansion; Jiref ¼ Ji
ref ðFi; qÞ ði ¼ g; rÞ is the specific free energy related to the temperature change with respect tothe reference state, defined at the reference temperature qref.
The free-energy contributions introduced in Eqs. (8) and (9) are defined as:
Jeg ¼ lg
2½trðEegÞ�2 þ mgtr
�Eeg2
�(10)
pg 1 pg 2
J ¼2h k E k (11)er lr er 2 r�
er2�
J ¼2½trðE Þ� þ m tr E (12)
Jg ¼ �3agkg�q� q
�tr½Eg� (13)
th refJr ¼ �3arkr�q� q
�tr½Er � (14)
th ref"� � q# � �
Jgref ¼ cg q� qref � q ln
qrefþ ugref � qsgref (15)
"� � q# � �
Jrref ¼ cr q� qref � q ln
qrefþ urref � qsrref (16)
Here, li and mi (i¼ g,r) are the first and second Lam�e parameters, respectively; h is a positive parameter describing thematerial hardening; ai (i¼ g,r) is the thermal expansion coefficient; ki (i¼ g,r) is the bulk modulus; ci (i¼ g,r) is the specificheat capacity; qref is the reference temperature; uiref and siref ði ¼ g; rÞ are respectively the specific internal energy and entropyat the reference temperature. Finally, Eer, Eeg, and Epg are the GreeneLagrange strain tensors defined as:
Eer ¼ Er ¼ FerTFer � 1
2(17)

E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177 159
Eeg ¼ FegTFeg � 1
2(18)
FpgTFpg � 1
Epg ¼2(19)
Note that we model the hyperelastic responses of the rubbery and glassy phases through a Saint VenanteKirchhoff typeexpression. The Saint VenanteKirchhoff model for hyperelasticity has been chosen heremerely for its simplicity, sincewe aimto present a flexible phenomenological modeling framework for SMPs, without restricting it to a specific polymer type. TheSaint VenanteKirchhoff model could be replaced by other hyperelasticity laws (e.g. Neo-Hookean, ArrudaeBoyce,OgdeneRoxburgh), which allow for a better description of the material behavior under tension and compression loading,according to the specific polymer under investigation.
2.3. Constitutive equations
Applying a standard ColemaneNoll procedure on the Helmoltz free energy (Coleman and Noll, 1963; Evangelista et al.,2010), we derive the constitutive equations. All the details about the derivation are reported in the Appendix.
The expressions of the second PiolaeKirchhoff stress tensors of the glassy and rubbery phases, respectively Sg and Sr, andof the thermodynamic force Xg related to the plastic deformation read:
Sg ¼ Fpg�1�lgtrðEegÞ1þ 2mgEeg�Fpg�T � 3agkg�q� qref
�1 (20)
Sr ¼ lrtrðEerÞ1þ 2mrEer � 3arkr�q� q
�1 (21)
refXg ¼ Ceg�lgtrðEegÞ1þ 2mgEeg�� hFpgEpgFpgT (22)
From the second PiolaeKirchhoff stress tensors, the Cauchy stresses for the glassy and rubbery phases can be derivedaccording to the well-known formulas (Bonet and Wood, 2008):
sg ¼ Jeg�1FegSgFegT (23)
sr ¼ Jr�1FrSrFrT (24)
where Jeg and Jr are the positive determinants of the glassy and rubbery elastic deformation gradient, respectively. The total
Cauchy stress s can be derived through a rule of mixtures, as:s ¼ zgsg þ ð1� zgÞsr (25)
For further details on the calculations and on the evaluation of the ClausiuseDuhem inequality, please see the Appendix.
2.4. Evolution equations
In this subsection we define the equations governing the evolution of the variables presented in Subsection 2.1, i.e. zg, Fpg,Ff, and Fp.
We start by assuming the following evolution for the volume fraction of the glassy phase zg, as similarly proposed in Reeseet al. (2010):
zg ¼
8>>>><>>>>:
1 if q � qt � Dq
11þ exp½2wðq� qtÞ� if qt � Dq< q< qt þ Dq
0 if q � qt þ Dq
(26)
where qt is the transition temperature and Dq represents the half-width of the transition temperature range, i.e.Dq ¼ qhigh � qt ¼ qt � qlow, with qhigh and qlow respectively the upper and lower limit of the transition range. The materialparameter w is a positive constant related to the smoothness of the curve within the transition temperature range. Furtherdetails about a proper choice ofw can be found in Reese et al. (2010). According to Eq. (26), zg depends only on temperature q
and ranges between 0 (i.e. rubbery phase at high temperatures) and 1 (i.e. glassy phase at low temperatures). Both glassy andrubbery phases coexist for temperatures qt � Dq < q < qtþDq.

E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177160
Then, we assume the following evolution for the plastic deformation gradient of the glassy phase, Fpg:
Fpg ¼
8>>>><>>>>:
evolves according to assigned flow ruleif q � qt � DqORif
nqt � Dq< q< qt þ Dq and _q � 0
oconstant if
nqt � Dq< q< qt þ Dq and _q>0
o1 otherwise
(27)
i.e. Fpg can only evolve when the material is deformed at lower temperatures than the transition range, or at decreasingtemperatures inside the transition range. The glassy plastic deformation is recovered when temperature increases over thetransformation range, so that we simply have Fpg¼ 1; it is worth to recall that in this last case, i.e. for q� qtþDq, the glassyphase is not present (zg¼ 0 in Eq. (26)).
Regarding the flow rule for the plastic deformation gradient of the glassy phase, Fpg (see Eq. (27)), we follow standardarguments (Wriggers, 2008; Dettmer and Reese, 2004) and adopt the following flow rule:
_Fpg ¼ _g
devðXgÞk devðXgÞ kF
pg (28)
where _g is the positive plastic consistent parameter.The limit function is assumed as:
FY ¼k devðXgÞ k �Rpg (29)
where Rpg is the limit yield stress.Further details regarding the derivation of the flow rule for the glassy phase plasticity are reported in the Appendix.Then, we assume the following evolution law for the frozen deformation gradient Ff:
Ff ¼�c ðF� 1Þ þ 1 if q � qt þ Dqconstant otherwise
(30)
As already mentioned in Subsection 2.1, c is a material parameter allowing to reproduce the imperfect shape-fixing. Itranges between 0 and 1: the shape-fixing is perfect when c¼ 1, so that Ff¼ F (i.e. all the applied deformation is stored); theshape-fixing is imperfect when 0< c< 1; whereas if c¼ 0 there is no shape-fixing.
Finally, we assume the following evolution for the permanent deformation gradient Fp:
Fp ¼(cp�Ff þ Fpg � 2$1
�þ 1 if fq � qt þ Dq and k Epk$ � 0g
constant otherwise(31)
A fraction of both deformation gradients Ff and Fpg is thus stored in the permanent deformation gradient Fp, as an irre-versible accumulated deformation. The parameter cp, ranging between 0 and 1, tunes the shape-recovery extent: the shape-recovery is completewhen cp¼ 0, i.e. when Fp ¼ 1; it is incompletewhen 0< cp< 1; no shape-recovery is present if cp¼ 1. Theassumption k Epk$ � 0 is also stated (where Ep ¼ ðFpTFp � 1Þ=2 and k $ k denotes the Euclidean norm), i.e. the norm of theGreeneLagrange strain tensor related to the permanent deformation gradient can never decrease during time.
2.5. Model parameters
The proposed model presents the following material parameters: (i) four elastic material parameters for the glassy andrubbery phases, i.e. the Young's moduli Eg and Er and the Poisson's coefficients ng and nr; (ii) the stress limit Rpg for plasticyielding of the glassy phase; (iii) the plastic hardening coefficient h; (iv) the parameter Dq, defining half-width of the tem-perature range; (v) the transformation temperature qt; (vi) the transformation coefficient w; (vii) the coefficient c to tuneimperfect shape-fixing; (viii) the coefficient cp to tune incomplete shape-recovery; (ix) the thermal parameters ar, ag, qref, cr,cg.
All the listed parameters have a physical interpretation and can be intuitively derived. The mechanical parameters relatedto the hyperelastic responses of the rubbery and glassy phases (i.e., Eg, Er, ng, nr) and to the plastic glassy phase response (i.e.,Rpg, h) are standard parameters adopted in the constitutive modeling of SMPs and are widely used in the literature. Theparameters Dq and qt clearly define the transition temperature range, while w tunes the smoothness of the rubbery/glassyphase transition (see also (Reese et al., 2010)). Finally, c and cp are two scalars used to add a simple but effective description ofthe non-ideal behavior of SMPs to the model formulation.

Table 1Numerical algorithm for the proposed SMP model.
Table 2Numerical algorithm for CASE 1.
E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177 161
3. Time-discrete model formulation
We now elaborate on a possible algorithmic treatment of the model equations presented in Section 2. For the sake ofnotation simplicity, we use subscript i�1 for all the variables evaluated at previous time ti�1, while we adopt subscript i for allthe variables computed at current time ti.
We assume as given the state variables qi�1; Fpgi�1; F
fi�1; F
pi�1 at previous time ti�1, and the total deformation gradient Fi and
the temperature qi at the current time ti.In order to derive the current time solution, three cases are distinguished according to the current temperature qi, as
described in the following. For each case, zgi ; Fpgi ; Ffi ;F
pi are derived, by integrating the evolution equations presented in the
previous section. Regarding the glassy phase plasticity, the plastic deformation gradient is calculated according to a classical
Table 3Numerical algorithm for CASE 2.

Table 4Numerical algorithm for CASE 3.
E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177162
return-mapping algorithm (Simo and Hughes, 1998), reported in Table 5. Specifically, we apply the exponential mappingscheme to the evolution Eq. (28) of the glassy plastic deformation gradient Fpg. Accordingly, we obtain:
Fpgi ¼ exp
0@Dg
dev�Xgi
�k dev
�Xgi
�k
1AFpgi�1 (32)
where Dg ¼Z ti
ti�1
_gdt. All the remaining model equations are directly evaluated at time ti. The main structure of the time-discrete algorithm is presented in Table 1.
First case: qi� qtþDqIn such case, only the rubbery phase is present, i.e. zgi ¼ 0; see Eq. (26). The frozen deformation gradient Ffi is stored
according to Eq. (30), the permanent deformation gradient Fp remains constant according to Eq. (31) and the glassy plasticdeformation gradient Fpgi is completely recovered, i.e. Fpgi ¼ 1 (see Eq. (27)). Table 2 reports the adopted algorithm.
Table 5Return-mapping algorithm for glassy phase plasticity.

Table 6Model parameters.
Symbol Value Unit
Er 0.9 MPaEg 771 MPanr 0.49 e
ng 0.29 e
Rpg 10 MPah 0 MPaDq 30 Kqt 350 Kw 0.2 1/Kc 0.9 (non-ideal case)�1 (ideal case) e
cp 0.2 (non-ideal case)�0 (ideal case) e
E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177 163
Second case: qt�Dq< qi< qtþDqIn such case, both the rubbery and glassy phases are present, i.e. zgi 2½0;1�; see Eq. (26). The frozen and the permanent
deformation gradients, Ffi and Fpi respectively, remain constant according to Eqs. (30) and (31). The glassy plastic deformationgradient Fpgi is allowed to evolve according to the return-mapping algorithm reported in Table 5 only if the current tem-perature is not increasing, while it remains constant otherwise (see Eq. (27)). Table 3 reports the adopted algorithm.
Third case: qi� qt�DqIn such case, only the glassy phase is present, i.e. zgi ¼ 1; see Eq. (26). The frozen deformation gradient Ffi remains constant,
while the glassy plastic deformation gradient Fpgi is allowed to evolve according to the return-mapping algorithm reported inTable 5. The permanent deformation gradient Fpi is derived through Eq. (31). Table 4 reports the adopted algorithm.
Finally, the total Cauchy stress s is calculated using the mixture rule reported in Eq. (25).The implicit implementation of FEM requires also the formulation of the consistent tangent matrix. To avoid coding of
complex equations, while maintaining a good convergence rate and an efficient numerical approximation of the tangentmoduli, we adopt a numerical Jacobian fourth-order tensor as proposed by Sun et al. (2008).
4. Numerical tests
The present section is devoted to several numerical simulations to demonstrate the performances of the presentedconstitutivemodel as well as to verify the effectiveness of the proposed algorithm. The simulations are quasistatic and includesimple uniaxial and biaxial tests as well as complex analyses of two biomedical SMP devices. A comparisonwith experimentaldata available from the literature (Volk et al., 2011; Gall et al., 2004) is also provided to effectively validate the model.Particularly, we perform the following finite element analyses:
� uniaxial and biaxial tests on a 1 � 1 � 1 mm3 single-element cube;� comparison with uniaxial experiments on polyurethane-based SMPs (Volk et al., 2011) and epoxy-based SMPs (Gall et al.,2004);
� simulation of a cardiovascular stent;� simulation of a contraceptive device.
0 0.1 0.2 0.3 0.4 0.50
2
4
6
8
10
12
14
Strain ε33 [−]
Stre
ssσ 33
[MP
a]
θ = 390 Kθ = 360 Kθ = 355 Kθ = 350 Kθ = 345 Kθ = 340 Kθ = 310 K
250 300 350 400 450−0.5
0
0.5
1
1.5
Temperature [K]
zg [−]
(a) (b)Fig. 4. Uniaxial test: (a) stressestrain curves at different (constant) temperatures; (b) trend of the volumetric fraction of glassy phase, zg, with temperature.

−0.1 −0.05 0 0.05 0.1 0.15
−0.1
−0.05
0
0.05
0.1
0.15
Extension u1 [mm]E
xten
sion
u2 [m
m]
−0.2 −0.1 0 0.1 0.2 0.3−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
Stress σ11 [MPa]
Stre
ssσ 22
[MP
a]
θ = 400 K
−15 −10 −5 0 5 10 15−15
−10
−5
0
5
10
15
Stress σ11 [MPa]
Stre
ssσ 22
[MP
a]
θ = 300 K
(a)
(b) (c)Fig. 5. Biaxial test: (a) hourglass-shaped input in terms of displacement components u1 and u2; (b) curve in terms of the non-zero stress components atq ¼ 400 K; (c) curve in terms of the non-zero stress components at q ¼ 300 K.
E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177164
For all the simulations we use the nonlinear finite element software ABAQUS/Standard (Abaqus, 2010), implementing thedescribed algorithm within a user-defined material subroutine (UMAT).
The terms related to the thermal expansion and to the temperature change with respect to the reference configurationhave been neglected in the finite element implementation of the model, since their impact is significantly lower than themechanical contribution.
Fig. 6. Tests 1, 2 and 3. Loading histories, in terms of imposed displacement, and temperature histories for each of the three uniaxial free-recovery traction tests.Test 1: deformation is applied at high temperature (0e1 s); then a constrained cooling is performed (1e2 s); the material is subsequently unloaded at lowtemperature (2e3 s): from instant 2 s, the displacement is therefore not constrained anymore; finally, the temperature is increased (3e4 s). Test 2: a deformationis applied at low-temperature (0e2 s); then, the material is unloaded (2e3 s); finally, the temperature is increased (3e4 s). In Test 3, both shape-fixing proceduresare performed, the high-temperature one during 0e2 s, the low-temperature one during 2e4 s; then, the material is unloaded (4e6 s); finally, the temperature isincreased (6e7 s).

E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177 165
In the following all the plots are defined in terms of components of the total Cauchy stress (or true stress) tensor and of thelogarithmic strain (or true strain) tensor, unless differently indicated.
4.1. Uniaxial and biaxial tests
We start by presenting the results of the uniaxial and biaxial tests. The model parameters used for these simulations arelisted in Table 6.
We first perform a standard uniaxial tensile test, with displacement control and a prescribed homogeneous constanttemperature field. The cube is subjected to a tensile displacement of 0.4 mm and subsequent unloading until a zero-stresscondition is reached. We repeat the test at different temperatures, in order to highlight the dependence of the materialbehavior on temperature. For this test the coefficients c and cp are kept respectively equal to 1 and 0, to consider an ideal
0 1 2 3 4−0.05
0
0.05
0.1
0.15
0.2
0.25
time [s]
Stra
inε 33
[−]
idealnon−ideal
0 1 2 3 4−1
0
1
2
3
4
5
6
Time [s]
Stre
ssσ 33
[MP
a]
idealnon−ideal
−0.05 0 0.05 0.1 0.15 0.2 0.25−1
0
1
2
3
4
5
6
Strain ε33 [−]
Stre
ssσ 33
[MP
a]
idealnon−ideal
150 200 250 300 350 400 450−1
0
1
2
3
4
5
6
7
Temperature [K]
Stre
ssσ 33
[MP
a]
idealnon−ideal
150 200 250 300 350 400 450−0.05
0
0.05
0.1
0.15
0.2
0.25
Temperature [K]
Stra
inε 33
[−]
idealnon−ideal
(a) (b)
(c)
(e)
(d)
Fig. 7. Test 1: (a) strain versus time curve; (b) stress versus time curve; (c) stress versus strain curve; (d) stress versus temperature curve; (e) strain versustemperature curve.

E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177166
behavior of the polymer. The resulting stressestrain curves for seven different temperatures are compared in Fig. 4(a); thecurve representing the trend of the volumetric fraction of the glassy phase, zg, with temperature is also provided in Fig. 4(b). Itcan be noted that the material behavior is guided by zg; particularly, the trend is symmetric with respect to the transitiontemperature qt¼ 350 K.
We then perform a biaxial test at different temperatures, in order to test the model and to investigatematerial behavior formore complex non-proportional loading cases. The test consists of a hourglass-shaped input in terms of displacement u1 andu2, as depicted in Fig. 5(a). Again, the coefficients c and cp are kept respectively equal to 1 and 0, to consider an ideal behaviorof the polymer. Fig. 5(b) and 5(c) show the obtained curves for the non-zero stress components at two different temperatures.It can be noted from the plots displayed in Fig. 5 that the stress components reach different order of magnitudes depending onthe test temperature: higher stresses are reached when the temperature is lower than the transition range (i.e. q < qt), whilelower stresses are obtained when the temperature is higher than the transition range (i.e. q > qt). This is explained by recallingthat the glassy phase is stiffer than the rubbery phase. The shape of the two curves is completely dissimilar; this depends on
0 1 2 3 4−0.05
0
0.05
0.1
0.15
0.2
0.25
Time [s]
Stra
inε 33
[−]
idealnon−ideal
0 1 2 3 4−2
0
2
4
6
8
10
12
14
Time [s]
Stre
ssσ
33 [M
Pa]
idealnon−ideal
−0.05 0 0.05 0.1 0.15 0.2 0.25−4
−2
0
2
4
6
8
10
12
14
Strain ε33 [−]
Stre
ssσ
33 [M
Pa]
idealnon−ideal
150 200 250 300 350 400 450−2
0
2
4
6
8
10
12
14
Temperature [K]
Stre
ssσ
33 [M
Pa]
idealnon−ideal
150 200 250 300 350 400 450−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Temperature [K]
Stra
inε 33
[−]
idealnon−ideal
(a) (b)
(c) (d)
(e)Fig. 8. Test 2: (a) strain versus time curve; (b) stress versus time curve; (c) stress versus strain curve; (d) stress versus temperature curve; (e) strain versustemperature curve.

0 1 2 3 4 5 6 7−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Time [s]
Stra
inε 33
[−]
idealnon−ideal
0 1 2 3 4 5 6 7−2
0
2
4
6
8
10
12
14
Time [s]
Stre
ssσ 33
[MP
a]
idealnon−ideal
0 0.05 0.1 0.15 0.2 0.25 0.3−2
0
2
4
6
8
10
12
14
Strain ε33 [−]
Stre
ssσ 33
[MP
a]
idealnon−ideal
150 200 250 300 350 400 450−2
0
2
4
6
8
10
12
14
Temperature [K]
Stre
ssσ 33
[MP
a]
idealnon−ideal
150 200 250 300 350 400 450−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Temperature [K]
Stra
inε 33
[−]
idealnon−ideal
(a) (b)
(c) (d)
(e)Fig. 9. Test 3: (a) strain versus time curve; (b) stress versus time curve; (c) stress versus strain curve; (d) stress versus temperature curve; (e) strain versustemperature curve.
Table 7Model parameters adopted for the comparison with experimental data by Volket al. (2011).
Symbol Value Unit
Er 11 MPaEg 3200 MPanr 0.497 e
ng 0.3 e
Dq 26 Kqt 336 Kw 0.25 1/Kc 0.972 e
cp 0 e
E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177 167

E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177168
the different material properties at different temperatures and on the fact that the behavior of the rubbery phase ishyperelastic, while the behavior of the glassy phase is elastoplastic.
Finally, we perform three uniaxial tests reproducing the shape-memory behavior of SMPs. An ideal (c¼ 1, cp¼ 0) and anon-ideal (cs 1, cps 0) case are considered for each of the three tests (see Table 6). We refer to the three tests as Test 1, Test 2,and Test 3; the loading histories, in terms of the imposed displacement, and the assigned temperature histories for the threeanalyses are reported in Fig. 6.
In Test 1 we simulate the high-temperature shape-fixing; the material is indeed deformed at 400 K, then cooled to 200 Kwhile the deformation is maintained constant, then unloaded at 200 K, and finally re-heated up to 400 K to trigger shape-recovery. The results of Test 1 are reported in Fig. 7, where differences can be noted between the ideal and the non-idealcurves. The imperfect shape-fixing is demonstrated by the small elastic springback shown between 2 and 3 s (as reportedin Fig. 7(a) and 7(b)). In fact, in the ideal case all the applied deformation is stored as “frozen”, leading to a zero-stresscondition at the end of the cooling phase (time instant 2 s). Instead, in the non-ideal case only part of the deformation isaccumulated, producing a stress increase during the cooling phase, due to the higher stiffness of the incoming glassy phase:therefore, during unloading, the deformation decreases until a zero-stress condition is reached, producing an elasticspringback. The incomplete shape-recovery can be noted especially in Fig. 7(a) and 7(e), where a residual strain is present atinstant 4 s.
In Test 2 we simulate the low-temperature shape-fixing; the material is indeed deformed at 200 K, then unloaded, andfinally heated up to 400 K to trigger shape-recovery. The results of Test 2 are reported in Fig. 8. In this case, no “frozen”deformation is present, because deformation takes place at low temperature. The only accumulated deformation is due to theplastic behavior of the glassy phase. Therefore, in both ideal and non-ideal cases, an elastic springback is present uponunloading (time interval 2e3 s), as shown in Fig. 8(a)e(c). The difference between the two cases is related to the incompleteshape-recovery of the non-ideal case, which as before can be noted in Fig. 8(a) and (e).
In Test 3 we consider both high-temperature and low-temperature shape-fixing. A first deformation is imposed at 400 Kand the material is constrained during cooling to 200 K, in order to operate the high-temperature shape-fixing; then, insteadof directly unloading, a further deformation is applied at low temperature; thematerial is then unloaded and finally re-heatedup to 400 K to trigger shape-recovery. The results of Test 3 are reported in Fig. 9. The recovery of both high-temperature andlow-temperature deformations takes place, with full recovery in the ideal case, and incomplete recovery in the non-ideal case.
−5 0 5 10 15 20 25 30−5
0
5
10
15
20
25
30
Extension [%]
Stre
ss [M
Pa]
NumericalExperimental
20 40 60 80 100−5
0
5
10
15
20
25
30
Temperature [°C]
Stre
ss [M
Pa]
NumericalExperimental
20 40 60 80 100−5
0
5
10
15
20
25
30
Temperature [°C]
Ext
ensi
on [%
]
NumericalExperimental
2040
6080
100
010
2030
0
10
20
30
Temperature [°C]Extension [%]
Stre
ss [M
Pa]
(a) (b)
(c) (d)Fig. 10. Comparison with experimental data by Volk et al. (2011): free-recovery test. (a) Stress versus extension curves; (b) stress versus temperature curves; (c)extension versus temperature curves; (d) stresseextensionetemperature curves.

20 40 60 80 100−5
0
5
10
15
20
25
30
Temperature [°C]
Stre
ss [M
Pa]
NumericalExperimental
20 40 60 80 100−5
0
5
10
15
20
25
30
Temperature [°C]
Ext
ensi
on [%
]
NumericalExperimental
2040
6080
100
010
2030
0
10
20
30
Temperature [°C]Extension [%]
Stre
ss [M
Pa]
(a) (b)
(c)Fig. 11. Comparison with experimental data by Volk et al. (2011): constrained-recovery test. (a) Stress versus temperature curves; (b) extension versus tem-perature curves; (c) stresseextensionetemperature curves.
E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177 169
4.2. Comparison between numerical and experimental data
We now perform a validation of the model, by presenting a comparison of the numerical results with experimental datafrom literature. In order to demonstrate the versatility of the model, we consider two different types of SMPs.
Firstly, a comparison with the experimental results presented by Volk et al. (2011) is provided. Free- and constrained-recovery experimental tests are operated on a polyurethane-based SMP. Both the free-recovery and the constrained-recovery test begin with a high-temperature shape-fixing procedure; subsequently, the material is heated to triggershape-recovery, respectively in unconstrained conditions for the free-recovery test and with constrained (zero) displacementfor the constrained-recovery test. The adopted model parameters are listed in Table 7.
The results of the free-recovery and constrained-recovery tests are reported in Figs. 10 and 11, respectively. In this case, theplots are defined in terms of engineering stress. The numerical and experimental curves reported in Figs. 10(a), (c) and 11(b)match well, while the trend of the stress with temperature, in Figs. 10(b) and 11(a), differ in the heating and cooling portionsof the curves. This is due to the fact that the path followed by the stress in the experimental data presents differences betweenheating and cooling. Whereas, in the proposed model formulation, the trend of the stress is linked to the evolution of theglassy phase volume fraction zg, which is the same during both heating and cooling.
A further comparison with experimental data obtained on an epoxy-based SMP by Gall et al. (2004) is provided. In Gallet al. (2004), an epoxy-based SMP reinforced with SiC nanoparticles was subjected to compressive load at 25 �C (low-tem-perature shape-fixing procedure); then, a constrained recovery has been performed by heating to 120 �C.
The experimental and numerical curves are reported in Fig. 12 and the adoptedmaterial parameters are listed in Table 8. Itcan be noted from the reported curves that the numerical model results satisfactorily match with the experimental ones. Thenumerical unloading stressestrain curve (see Fig. 12(a)) could even better follow the experimental one by using a differentmodel for hyperelasticity, e.g. Neo-Hookean instead of Saint VenanteKirchhoff.
It is worth to recall that the fitting of the experimental data sets has been performed by an iterative trial-and-errorprocedure. Nonetheless, further developments of the present work may include the investigation of a more efficient pro-cedure to derive the model parameters.

−10 0 10 20 30 40 50−10
0
10
20
30
40
50
60
70
Compressive strain [%]
Com
pres
sive
stre
ss [M
Pa]
NumericalExperimental
20 40 60 80 100 120−1
0
1
2
3
4
5
6
7
Temperature [°C]
Com
pres
sive
stre
ss [M
Pa]
NumericalExperimental
(a)
(b)Fig. 12. Comparison with experimental data by Gall et al. (2004): (a) compression stressestrain curves at 25 �C; (b) stress versus temperature curves duringconstrained-recovery.
Table 8Material parameters adopted for the comparison with experimental data by Gallet al. (2004).
Symbol Value Unit
Er 4.1 MPaEg 800 MPanr 0.49 e
ng 0.30 e
Rpg 39 MPah 22 MPaDq 60 Kqt 330 Kw 0.048 1/Kc 1 e
cp 0 e
E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177170

Fig. 13. Stent simulation: (left) adopted geometry, coordinate system, and scheme of the boundary conditions applied to the stent. The bottom side is fixed, whilea displacement is imposed on the top side, in order to crush the stent. (right) Deformed geometry of the stent after crushing at high temperature.
E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177 171
4.3. Simulation of biomedical devices
We conclude by simulating two biomedical devices. The model parameters used are listed in Table 6, considering the onesrelated to the non-ideal case. Both components are modeled in SolidWorks (2014) and are meshed using second-orderhexahedral elements with full integration (Abaqus designation C3D10).
The first investigated device is a cardiovascular stent. The geometry is similar to the one reported in Yakacki et al. (2007).The external diameter is 20 mm, the thickness is 0.5 mm, the length of the stent is 20 mm, and the diameter of the holes is
0 5 10 15 20−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Displacement [mm]
Forc
e [N
]
150 200 250 300 350 400 4500
5
10
15
20
Temperature [K]
Dis
plac
emen
t [m
m]
150 200 250 300 350 400 450−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Temperature [K]
Forc
e [N
]
(a) (b)
(c)Fig. 14. Stent simulation: (a) force versus displacement curve; (b) displacement versus temperature curve; (c) force versus temperature curve.

Fig. 15. Stent simulation: Von Mises stress distribution (in MPa) on the stent at the most relevant time steps of the analysis.
E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177172
2 mm. The geometry, the coordinate system, and a scheme of the applied boundary conditions are provided in Fig. 13: thebottom side of the stent is fixed, while a displacement along x direction is imposed on the top side, in order to crush the stent.The histories of imposed temperature and displacement are the same of Test 1 (see Fig. 6), including a high-temperatureshape-fixing procedure and a subsequent shape-recovery. Specifically, the stent is crushed at 400 K, then it is kept in posi-tion during cooling to 200 K. Afterwards, it is unloaded, and finally re-heated up to 400 K to induce shape-recovery. Similarloading histories on SMP stents have been previously considered in literature, e.g. in Baghani et al. (2014) and Reese et al.(2010).
The results of the stent simulation are reported in Fig. 14. The displacement is measured in correspondence of the top sideof the stent, while the force is referred to the global reaction force of the fixed bottom side.
Contour plots of the Von Mises stress distribution at the most relevant time instants of the analysis are reported in Fig. 15.In particular, it can be noted that the stress increases during constrained cooling, since the transformation from rubbery toglassy phase is taking place. After recovery upon heating, a residual deformation remains, since the behavior has beenassumed non-ideal; the original shape is therefore not completely recovered.
Fig. 16. Contraceptive device test: coordinate system and scheme of the boundary conditions; (top) adopted geometry of the device and (bottom) deformedgeometry after axial elongation at low temperature.

−5 0 5 10 15 20−1000
0
1000
2000
3000
4000
5000
6000
Displacement [mm]
Forc
e [N
]
150 200 250 300 350 400 450−5
0
5
10
15
20
Temperature [K]
Dis
plac
emen
t [m
m]
150 200 250 300 350 400 450−1000
0
1000
2000
3000
4000
5000
6000
Temperature [K]
Forc
e [N
](a) (b)
(c)Fig. 17. Contraceptive device test: (a) force versus displacement curve; (b) displacement versus temperature curve; (c) force versus temperature curve.
Fig. 18. Contraceptive device test: Von Mises stress distribution (in MPa) at the most relevant time steps of the analysis.
E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177 173

E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177174
The second investigated device is a contraceptive device similar to the one reported in Tang et al. (2013). Only for this test,the hardening coefficient h has been set equal to 100 MPa. The device is 58 mm long and its outer diameter measures about14 mm. The geometry, coordinate system, and a scheme of the boundary conditions are shown in Fig. 16. One side of thedevice is fixed; on the other side a displacement is applied in the (axial) z direction. The histories of the temperature andboundary conditions are the same of Test 2 (see Fig. 6), including a low-temperature shape-fixing procedure and a subsequentshape-recovery. Specifically, the device is first elongated at a temperature of 200 K, it is then unloaded, and finally re-heatedup to 400 K to induce shape-recovery. Such loading history aims to reproduce the experimental procedure performed in Tanget al. (2013).
The simulation results of the contraceptive device are reported in Fig. 17. The displacement is measured in correspondenceof the left side, while the force is the reaction force at the constrained (right) side (see Fig. 16).
Contour plots related to the Von Mises stress distribution at the most relevant time instants of the analysis are reported inFig. 18. As before, the non-ideal character of the material entails an incomplete shape-recovery.
5. Conclusions
The present paper has proposed a constitutive model for SMPs. The time-continuous model equations have been pre-sented, together with the time-discrete algorithm for the numerical implementation. The number of parameters involved inthe model formulation is low (11 parameters are required) and they are related to physical quantities, thus promoting themodel simplicity. Moreover, the simple algorithmic scheme entails a low computational effort.
The proposed model is based on a phase-transition approach and therefore cannot describe the thermoviscoelasticbehavior of polymers, as discussed in the previous sections, but it can be applied to engineering problems where only themacroscopic phenomenology related to SMPs is relevant for the application purposes.
The model has been assessed through a wide range of uniaxial and biaxial numerical tests; complex simulations of twobiomedical devices have been also presented. The model has revealed its ability in reproducing both shape-fixing and shape-recovery of SMPs, also taking into account the imperfection of the real material behavior (i.e. imperfect shape-fixing andincomplete shape-recovery). When compared to experimental results presented in the literature for different polymer types,the numerical curves show a good overall agreement. Model validation on other meaningful applications could be aninteresting task for future studies.
The flexibility of the proposed model allows for its application over a wide range of polymer types. Extensions or mod-ifications can be easily applied to the model to adapt it to the desired category of polymers. As an example, a differentevolution law for the glassy volume fraction zg during cooling and heating could be considered (see Fig. 10(b)), or a differenthyperelastic model can be chosen to describe the elastic behavior of the two phases, e.g. the OgdeneRoxburgh model.However, we should highlight that the viscoelastic behavior during the rubberyeglassy phase transition has been neglectedin the present contribution. Such behavior has been observed experimentally, e.g. Pieczyska et al. (2015), and can have asignificant influence on the shape-memory effect in practical applications. Future improvements of the present model willinclude the introduction of viscous effects and the consideration of non-quasistatic cases. Also, we have restricted ourselves tothe isotropic case, first of all for simplicity, but also due to the lack of experimental data about anisotropic cases. To conclude,the presented model is a valid phenomenological tool to simulate the behavior of SMPs in all sort of applications, e.g. in thebiomedical field, in a simple and accurate way.
Acknowledgments
The authors would like to acknowledge the following projects: “Advanced mechanical modeling of new materials andtechnologies for the solution of 2020 European challenges”, funded by MIUR (Italian Department of University Research),project ID 2010BFXRHS; grant number 2013-1779, funded by Fondazione Cariplo.
The authors would like to thank Prof. Katia Bertoldi, from Harvard University SEAS, for her useful advice.
Appendix
Here, we present the derivation of the model equations and the evaluation of the dissipation inequality.At first, the second law of thermodynamics in the form of the ClausiuseDuhem inequality is evaluated (Evangelista et al.,
2010; Dettmer and Reese, 2004):
�r _Jþ Sg : _Eg þ Sr : _E
r � rs _T � q$VTT
� 0 (33)
where r is the material density, s is the entropy, and q is the heat flux vector; the symbol V represents the gradient operator.The computation of _J is now reported:

E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177 175
_J ¼ vJvT
_T þ zgvJg
vEg : _Eg þ zg
vJg
vEpg : _Epg þ ð1� zgÞ vJ
r
vEr : _Er
(34)
Introducing Eq. (34) into the ClausiuseDuhem inequality, we have:
�r
�vJvT
_T þ zgvJg
vEg: _E
g þ zgvJg
vEpg: _E
pg þ ð1� zgÞ vJr
vEr: _E
r�þ Sg : _E
g þ Sr : _Er � rs _T � q$VT
T� 0 (35)
vJ
g
vJgg
g g
vJrr
r gvJg
pg q$VT
�rvTþ s _T þ rz �vEg þ S : _E þ rð1� z Þ �
vErþ S : _E � rz
vEpg: _E �
T� 0 (36)
The term related to plasticity is traditionally expressed according to the plastic velocity gradient, defined as:
Lpg :¼ _FpgFpg�1 (37)
Therefore, we can reformulate expression (36) as:
�r
vJvT
þ s_T þ rzg
� vJg
vEgþ Sg
: _E
g þ rð1� zgÞ� vJr
vErþ Sr
: _E
r � rzgFpgvJg
vEpgFpgT : Lpg � q$VT
T� 0 (38)
From the ClausiuseDuhem inequality we can define the constitutive equations:
Sg ¼ vJg
vEg ¼ Fpg�1vJeg
vEeg Fpg�T þ vJg
thvEg ¼ Fpg�1�lgtrðEegÞ1þ 2mgEeg
�Fpg�T � 3agkg
�T � Tref
�1 (39)
Sr ¼ vJr
vEr ¼ vJer
vEer þ vJrth
vEr¼ lrtrðEerÞ1þ 2mrEer � 3arkr
�T � Tref
�1 (40)
s ¼ �vJvT
¼ sref �vzg
vT
�Jg �Jr�þ 3arkrtr½Er� þ 3agkgtr½Eg� þ c ln
TTref
� vJ
vFf:vFf
vT� vJvFp
:vFp
vT(41)
Xg : ¼ �FpgvJg
vEpgFpgT ¼ Ceg
vJeg
vEeg� Fpg
vJpg
vEpg FpgT ¼ Ceg
�lgtrðEegÞ1þ 2mgEeg
�� hFpgEpgFpgT (42)
with Xg the thermodynamic force associated to the plastic velocity gradient, where we identify the Mandel stressMg : ¼ CegvJg
vEeg .It is worth highlighting that, differently from Fpg, the quantities zg,Ff,Fp cannot be considered internal variables, so the
ClausiuseDuhem inequality does not restrain their evolution laws. Note that their evolution is only dependent on temper-ature (see Subsection 2.4): therefore, when _J is evaluated, they are incorporated into the differentiation term vJ
vT .In order to satisfy the second law of thermodynamics, we need positive mechanical and thermal dissipation. Since we are
in the isotropic case, the plastic velocity gradient can be identified with its symmetric part, i.e.LpgzDpg ¼ 1
2 ð _FpgFpg�1 þ Fpg�T ½ _Fpg �T Þ. We can therefore express the mechanical dissipation as:
Xg : Dpg � 0 (43)
To ensure the positiveness of the mechanical dissipation term, we assume a convex limit function:
FY ¼ kdevðXgÞk � Rpg (44)
and we express the flow rule according to the normality property:
Dpg ¼ _gvFYvXg ¼ _g
devðXgÞkdevðXgÞk (45)
Considering the definition of the plastic velocity gradient, given in Eq. (37), the evolution law (45) can be equivalentlywritten as:

E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177176
_Fpg ¼ _g
vFYvXgF
pg ¼ _gdevðXgÞ
k devðXgÞ kFpg (46)
Finally, we enforce the Kuhn-Tucker conditions:
_g � 0; FY � 0; _gFY ¼ 0 (47)
The thermal dissipation is:
�q$VTT
� 0 (48)
To guarantee the positiveness of the thermal dissipation term, we can assume q¼�kthVT according to the Fourier law forthe heat conduction, with kth the heat conduction coefficient of the material.
References
Abaqus, 2010. Analysis User's Manual. Dassault Syst�emes of America Corp. (Woodland Hills, CA).Abrahamson, E.R., Lake, M.S., Munshi, N.A., Gall, K., 2003. Shape memory mechanics of an elastic memory composite resin. J. Intell. Mater. Syst. Struct. 14,
623e632.Baer, G., Wilson, T.S., Matthews, D.L., Maitland, D.J., 2007. Shape-memory behavior of thermally stimulated polyurethane for medical applications. J. Appl.
Polym. Sci. 103, 3882e3892.Baghani, M., Naghdabadi, R., Arghavani, J., Sohrabpour, S., 2012. A thermodynamically-consistent 3D constitutive model for shape memory polymers. Int. J.
Plast. 35, 13e30.Baghani, M., Arghavani, J., Naghdabadi, R., 2014. A finite deformation constitutive model for shape memory polymers based on Hencky strain. Mech. Mater.
73, 1e10.Barot, G., Rao, I., Rajagopal, K., 2008. A thermodynamic framework for the modeling of crystallizable shape memory polymers. Int. J. Eng. Sci. 46, 325e351.Bonet, J., Wood, R.D., 2008. Nonlinear Continuum Mechanics for Finite Element Analysis. Cambridge University Press.Chen, Y.-C., Lagoudas, D.C., 2008a. A constitutive theory for shape memory polymers. Part I large deformations. J. Mech. Phys. Solids 56, 1752e1765.Chen, Y.-C., Lagoudas, D.C., 2008b. A constitutive theory for shape memory polymers. Part II. A linearized model for small deformations. J. Mech. Phys. Solids
56, 1766e1778.Coleman, B.D., Noll, W., 1963. The thermodynamics of elastic materials with heat conduction and viscosity. Arch. Ration. Mech. Anal. 13, 167e178.Dettmer, W., Reese, S., 2004. On the theoretical and numerical modelling of ArmstrongeFrederick kinematic hardening in the finite strain regime. Comput.
Methods Appl. Mech. Eng. 193, 87e116.Diani, J., Liu, Y., Gall, K., 2006. Finite strain 3D thermoviscoelastic constitutive model for shape memory polymers. Polym. Eng. Sci. 486e492.Evangelista, V., Marfia, S., Sacco, E., 2010. A 3D SMA constitutive model in the framework of finite strain. Int. J. Numer. Meth. Eng. 81, 761e785.Gall, K., Dunn, M.L., Liu, Y., Stefanic, G., Balzar, D., 2004. Internal stress storage in shape memory polymer nanocomposites. Appl. Phys. Lett. 85 (2), 290e292.Ge, Q., Luo, X., Iversen, C.B., Nejad, H.B., Mather, P.T., Dunn, M.L., Qi, H.J., 2014. A finite deformation thermomechanical constitutive model for triple shape
polymeric composites based on dual thermal transitions. Int. J. Solids Struct. 51, 2777e2790.Ghosh, P., Srinivasa, A., 2011. A two-network thermomechanical model of a shape memory polymer. Int. J. Eng. Sci. 49, 823e838.Ghosh, P., Srinivasa, A., 2013. A two-network thermomechanical model and parametric study of the response of shape memory polymers. Mech. Mater. 60,
1e17.Gu, J., Sun, H., Fang, C., 2015. A phenomenological constitutive model for shape memory polyurethanes. J. Intell. Mater. Syst. Struct. 26 (5), 517e526.Hager, M.D., Bode, S., Weber, C., Schubert, U.S., 2015. Shape memory polymers: past, present and future developments. Prog. Polym. Sci. 49, 3e33.Hu, J., Zhu, Y., Huang, H., Lu, J., 2012. Recent advances in shape-memory polymers: structure, mechanism, functionality, modeling and applications. Prog.
Polym. Sci. 37, 1720e1763.J€ackle, J., 1986. Models of the glass transition. Rep. Prog. Phys. 49 (2), 171.Kim, J., Kang, T., Yu, W., 2010. Thermo-mechanical constitutive modeling of shape memory polyurethanes using a phenomenological approach. Int. J. Plast.
26, 204e218.Krairi, A., Doghri, I., 2014. A thermodynamically-based constitutive model for thermoplastic polymers coupling viscoelasticity, viscoplasticity and ductile
damage. Int. J. Plast. 60, 163e181.VV.AA.. In: Lendlein, A. (Ed.), 2010. Shape Memory Polymers. Springer-Verlag Berlin Heidelberg.Lendlein, A., Kelch, S., 2002. Shape-memory polymers. Angew. Chem. Int. Ed. 41, 2034e2057.VV.AA.. In: Leng, J., Du, S. (Eds.), 2010. Shape-memory Polymers and Multifunctional Composites. CRC Press.Li, G., Xu, W., 2011. Thermomechanical behavior of thermoset shape memory polymer programmed by cold-compression: testing and constitutive
modeling. J. Mech. Phys. Solids 59, 1231e1250.Lion, A., Liebl, C., Kolmeder, S., Peters, J., 2010. Representation of the glass-transition in mechanical and thermal properties of glass-forming materials: a
three-dimensional theory based on thermodynamics with internal state variables. J. Mech. Phys. Solids 58, 1338e1360.Liu, Y., Gall, K., Dunn, M.L., Greenberg, A.R., Diani, J., 2006. Thermomechanics of shape memory polymers: uniaxial experiments and constitutive modeling.
Int. J. Plast. 22, 279e313.Liu, C., Qinb, H., Mather, P.T., 2007. Review of progress in shape-memory polymers. J. Mater. Chem. 17, 1543e1558.Moon, S., Cui, F., RaoI, I., 2015. Constitutive modeling of the mechanics associated with triple shape memory polymers. Int. J. Eng. Sci. 96, 86e110.Naghdabadi, R., Baghani, M., Arghavani, J., 2012. A viscoelastic constitutive model for compressible polymers based on logarithmic strain and its finite
element implementation. Finite Elem. Anal. Des. 62, 18e27.Nguyen, T.D., Qi, H.J., Castro, F., Long, K.N., 2008. A thermoviscoelastic model for amorphous shape memory polymers: incorporating structural and stress
relaxation. J. Mech. Phys. Solids 56, 2792e2814.Nguyen, T., Yakacki, C., Brahmbhatt, P., Chambers, M., 2010. Modeling the relaxation mechanisms of amorphous shape memory polymers. Adv. Mater. 22,
3411e3423.Pakula, T., Trznadel, M., 1985. Thermally stimulated shrinkage forces in oriented polymers: 1. Temperature dependence. Polymer 26, 1011e1018.Pandini, S., Passera, S., Messori, M., Paderni, K., Toselli, M., Gianoncelli, A., Bontempi, E., Ricco, T., 2012. Two-way reversible shape memory behaviour of
crosslinked poly(ε-caprolactone). Polymer 53, 1915e1924.Park, H., Harrison, P., Guo, Z., Lee, M.-G., Yu, W.-R., 2016. Three-dimensional constitutive model for shape memory polymers using multiplicative
decomposition of the deformation gradient and shape memory strains. Mech. Mater. 93, 43e62.

E. Boatti et al. / International Journal of Plasticity 83 (2016) 153e177 177
Pieczyska, E.A., Maj, M., Kowalczyk-Gajewska, K., Staszczak, M., Gradys, A., Majewski, M., Cristea, M., Tobushi, H., Hayashi, S., 2015. Thermomechanicalproperties of polyurethane shape memory polymer: experiment and modelling. Smart Mater. Struct. 24, 045043.
Popa, C., Fleischhauer, R., Schneider, K., Kaliske, M., 2014. Formulation and implementation of a constitutive model for semicrystalline polymers. Int. J. Plast.61, 128e156.
Qi, H., Nguyen, T., Castro, F., Yakacki, C., Shandas, R., 2008. Finite deformation thermo-mechanical behavior of thermally-induced shape memory polymers.J. Mech. Phys. Solids 56, 1730e1751.
Rabani, G., Luftmann, H., Kraft, A., 2006. Synthesis and characterization of two shape-memory polymers containing short aramid hard segments and poly(ε-caprolactone) soft segments. Polymer 47, 4251e4260.
Reese, S., B€ol, M., Christ, D., 2010. Finite element-based multi-phase modelling of shape memory polymer stents. Comput. Methods Appl. Mech. Eng. 199,1276e1286.
Rodriguez, J.N., Clubb, F.J., Wilson, T.S., Miller, M.W., Fossum, T.W., Hartman, J., Tuzun, E., Singhal, P., Maitland, D.J., 2014. In vivo response to an implantedshape memory polyurethane foam in a porcine aneurysm model. J. Biomed. Mater. Res. A 102 (5), 1231e1242.
Scalet, G., Auricchio, F., Bonetti, E., Castellani, L., Ferri, D., Pachera, M., Scavello, F., 2015. An experimental, theoretical and numerical investigation of shapememory polymers. Int. J. Plast. 67, 127e147.
Simo, J.C., Hughes, T.J.R., 1998. Computational Inelasticity. Springer-Verlag.SolidWorks, 2014. Dassault Syst�emes. V�elizy-Villacoublay, France.Sujithra, R., Srinivasan, S., Arockiarajan, A., 2015. Shape recovery studies for coupled deformations in an epoxy based amorphous shape memory polymers.
Polym. Test. 48, 1e6.Sun, W., Chaikof, E.L., Levenston, M.E., 2008. Numerical approximation of tangent moduli for finite element implementations of nonlinear hyperelastic
material models. Biomech. Eng. 130 (6), 061003.Tang, S., Zhang, C.-Y., Huang, M.-N., Luo, Y.-F., Liang, Z.-Q., 2013. Fallopian tube occlusionwith a shape memory polymer device: evaluation in a rabbit model.
Contraception 87, 235e241.Tobushi, H., Hashimoto, T., Hayashi, S., Yamada, E., 1997. Thermomechanical constitutive modeling in shape memory polymer of polyurethane series. J.
Intell. Mater. Syst. Struct. 8, 711e718.Tobushi, H., Okumura, K., Hayashi, S., Ito, N., 2001. Thermomechanical constitutive model of shape memory polymer. Mech. Mater. 33 (10), 545e554.Tobushi, H., Matsui, R., Hayashi, S., Shimada, D., 2004. The influence of shape-holding conditions on shape recovery of polyurethane-shape memory
polymer foams. Smart Mater. Struct. 13, 881.Tobushi, H., Hayashi, S., Hoshio, K., Miwa, N., 2006. Influence of strain-holding conditions on shape recovery and secondary-shape forming in polyurethane-
shape memory polymer. Smart Mater. Struct. 15, 1033.Volk, B.L., Lagoudas, D.C., Maitland, D.J., 2011. Characterizing and modeling the free recovery and constrained recovery behavior of a polyurethane shape
memory polymer. Smart Mater. Struct. 20 (9), 094004e1e094004e18.Westbrook, K.K., Parakh, V., Chung, T., Mather, P.T., Wan, L.C., Dunn, M.L., Qi, H.J., 2010. Constitutive modeling of shape memory effects in semicrystalline
polymers with stretch induced crystallization. J. Eng. Mater. Technol. 132, 041010e1e9.Westbrook, K., Kao, P., Castro, F., Ding, Y., Qi, H., 2011. A 3d finite deformation constitutive model for amorphous shape memory polymers: a multi-branch
modeling approach for nonequilibrium relaxation processes. Mech. Mater. 43, 853e869.Wriggers, P., 2008. Nonlinear Finite Element Methods. Springer.Xiao, R., Choi, J., Lakhera, N., Yakacki, C.M., Frick, C.P., Nguyen, T.D., 2013. Modeling the glass transition of amorphous networks for shape-memory behavior.
J. Mech. Phys. Solids 61, 1612e1635.Xie, T., 2011. Recent advances in polymer shape memory. Polymer 52, 4985e5000.Xu, W., Li, G., 2010. Constitutive modeling of shape memory polymer based self-healing syntactic foam. Int. J. Solids Struct. 47, 1306e1316.VV.AA. In: Yahia, L. (Ed.), 2015. Shape Memory Polymers for Biomedical Applications. Woodhead Publishing, pp. ixex.Yakacki, C.M., Shandas, R., Lanning, C., Rech, B., Eckstein, A., Gall, K., 2007. Unconstrained recovery characterization of shape-memory polymer networks for
cardiovascular applications. Biomaterials 28, 2255e2263.Yang, Q., Li, G., 2015. Temperature and rate dependent thermomechanical modeling of shape memory polymers with physics based phase evolution law. Int.
J. Plast.