Embed Size (px)
Citation preview

INTERFAZ GRAFICA DE USUARIO PARA
PRUEBAS DE MARCHA EN UN ROBOT BIPEDO
R. Lopez-Garcıa, O. Narvaez-Aroche, E. Rocha-Cozatl†
† Departamento de mecatronica; Facultad de Ingenierıa, UNAMTel. (52 55) 56 22 80 50 y 51, ext. 129. Fax (52 55) 56 22 80 50 y 51, ext. 128
[email protected], [email protected], [email protected]
Abstract
In this contribution it is described a graphical userinterface (GUI) to interact with a 12 internal DOFLynxmotionⓇ biped robot. Since there is an increas-ing interest of the scientific community for anthro-pomorphic biped robots, several problems and chal-lenges come up mainly in the generation of dynami-cally stable walking patterns with robust character-istics with respect to disturbances. The main goal ofthis interface is to obtain a software platform flexi-ble enough to perform experiments in order to evalu-ate different walking patterns. In addition to makingeasier the actuation of servomotors, the presentedinterface displays a virtual model where one can ob-serve the spatial configuration of the robot. On theother hand, on-line actuation of the robot is usefulto assist the design of walking patterns.
Resumen
Este trabajo describe una interfaz grafica deusuario que permite interactuar con un robot bıpedoScout de 12 GDL internos LynxmotionⓇ. A causadel reciente interes de la comunidad cientıfica porlos robots bıpedos antropomorficos, una variedadde problemas y retos han surgido, en su mayorıa,con el objetivo de generar patrones de caminatadinamicamente estables y robustos ante perturba-ciones. El objetivo de desarrollar esta interfaz es ge-nerar una plataforma de computo lo suficientementeflexible para realizar experimentos donde se evalueel desempeno de diferentes patrones de caminata.Ademas de facilitar el control de las posiciones angu-lares de los servomotores, la interfaz grafica cuentacon un modelo virtual con el que se puede observarla disposicion espacial del robot. Por otra parte, laactuacion del robot en tiempo real es util para asistiren el diseno de sus patrones de marcha.
1. Introduccion
Durante varios anos, la necesidad de construirmaquinas capaces de realizar actividades monotonas,de gran precision o de alto riesgo para los obreros,motivo al desarrollo de automatas con objetivos par-ticulares y caracterısticas muy distintas a las delos seres humanos, tales como los manipuladoresroboticos. Si bien su estudio aun persiste, el propioprogreso en la robotica clasica, ası como la inquietudpor construir mecanismos semejantes a los organis-mos vivos y sus aplicaciones potenciales, han motiva-do la investigacion en robots biologicamente inspira-dos. Debido a ello han emergido nuevos desafıos, unode los cuales es el de reproducir la marcha bıpeda enrobots.
Al carecer de un eslabon fijo a tierra, los robotsbıpedos tienen la posibilidad de transportarse de unlado a otro. A pesar de que los robots con llan-tas, como los Ballbots [4], son capaces de alcanzardicho objetivo, los bıpedos tienen varias ventajas.Particularmente, estan dotados de mayor movilidad:pueden subir escaleras, desplazarse sobre terracerıao cambiar de direccion. Es decir, no es necesarioconstruir entornos para su desempeno, pues puedenadaptarse a lugares habitados por humanos. Sin em-bargo, acompanando a esta ventaja existe un handi-cap inherente: los robots bıpedos son, por naturaleza,dinamicamente inestables. Por ello, este problemaha atraıdo a una gran cantidad de investigadores deareas de la ingenierıa de instrumentacion y control,mecanica y de procesamiento de datos, motivando suconjuncion con el fin de proporcionar una solucionsatisfactoria al problema de la caminata de robotsbıpedos.
Con el objetivo de lograr una locomocion bıpe-da dinamicamente estable se han realizado una grancantidad de investigaciones, de las cuales han surgi-do nuevos conceptos, tecnicas y metodos. Uno delos conceptos mas importantes, y aun vigente, en la
A1_213
ISBN: 978-607-95309-5-2 << pag. 357 >>
MEMORIAS DEL XVII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM21 al 23 DE SEPTIEMBRE, 2011 SAN LUIS POTOSI, MEXICO
robotica bıpeda es el criterio del punto de momen-to cero (ZMP por sus siglas en ingles) [10], el cualpermite determinar si la caminata de un bıpedo esestable o no.
Asumiendo que se tiene un robot bıpedo ya cons-truido, el proceso para lograr una caminata bıpe-da dinamicamente estable puede dividirse en trespartes:
1. Modelado cinematico [9] y dinamico del robot.Se considera uno u otro dependiendo de la tecni-ca a utilizar en los siguientes puntos.
2. Generacion de patrones de caminata. Estepuede realizarse en modo on-line [7] o en modooff-line [2].
3. Diseno de un controlador para estabilizar albıpedo ante perturbaciones [11].
Los criterios de estabilidad, como el ZMP, son uti-lizados tanto para la evaluacion de los patrones decaminata generados (punto 2) como para ser conside-rado en el diseno de los esquemas de control (punto3).
En esta contribucion se presenta, por tanto, el de-sarrollo de la interfaz de usuario requerida por losautores, es decir, una plataforma desde la cual sepuedan validar los modelos cinematico [9] y dinami-co, simular y verificar la validez de los patronesde caminata sintetizados y que facilite la imple-mentacion de los controladores que se disenaran enun futuro.
Una interfaz grafica de usuario (GUI, por sus siglasen ingles Graphical User Interface) aprovecha las ca-pacidades graficas de un ordenador para permitir eluso de un programa de una manera mas intuitiva.En ingenierıa es comun usarlas tanto para facilitar elaccionamiento y la programacion de robots, como si-mular procesos en los que se aprovechan las visualiza-ciones de espacios tridimensionales virtuales; talescomo las rutinas de un sistema de manufactura flexi-ble [6].
Aunque no es necesario contar con interfaces grafi-cas para manipular robots bıpedos, estas facilitanla interaccion con ellos, permitiendo por ejemplomanipular a los bıpedos en tiempo real, programarrutinas o recopilar datos sobre su funcionamiento atraves de sensores. Una caracterıstica adicional de-seada sera la posibilidad de realizar todas estas ope-raciones con la mayor flexibilidad y facilidad posi-bles.
Debido a las ventajas de contar con una GUI enaplicaciones de robotica, en la actualidad existenvarias empresas dedicadas a su diseno. Por ejem-plo, ALDERABAN robotics ha creado la platafor-
ma NAOqi para programar a su humanoide NAO.Cyberbotics Ltd. creo Webots [5], un softwarepara robots moviles que permite modelar y simu-lar cuadrupedos, bıpedos y humanoides, entre otros;ademas de transferir rutinas de movimiento a robotscomerciales.
A pesar de las facilidades ofrecidas por estos yotros programas, tambien cuentan con varias desven-tajas. Ademas de tener un gran costo, los progra-mas anteriores presentan las siguientes limitaciones:no pueden ser usados para interactuar con cualquierbıpedo ni pueden ser modificados para adaptarlosa las necesidades del usuario. Disenando nuestrapropia interfaz podemos contar con algunas carac-terısticas de las plataformas anteriores y modificarel codigo de acuerdo a la evolucion del proyecto.
Se pretende que esta herramienta sea de granapoyo para la realizacion de pruebas y experimen-tos en el bıpedo Scout, facilitando nuestras inves-tigaciones en torno a la estabilidad dinamica de lamarcha.
Este documento se organiza de la siguiente ma-nera. En la seccion 2 se realiza el planteamiento delas caracterısticas de la interfaz. En la seccion 3 sepresentan los diferentes paneles de que consta y enla seccion 4 se presentan algunos resultados. Final-mente, en la seccion 5 se presentan las conclusionesy se comenta el trabajo a futuro.
2. Planteamiento
2.1. El robot bıpedo Scout
Scout es un robot bıpedo desarrollado porLynxmotionⓇ (ver figura 1). Tiene una altura de23[cm] y un peso de 0,9[kg]. Su estructura, cons-tituida por eslabones de aluminio anodizado, se en-cuentra restringida por la geometrıa de sus servo-motores. Los 12 GDL internos con los que cuentalo dotan de una gran versatilidad, haciendolo capazde caminar hacia adelante, hacia atras o girar conpatrones de marcha similares a los de la locomocionhumana. Por ello, de acuerdo a la clasificacion quese encuentra en [1], este es un robot antropomorfico.
2.2. Arquitectura del robot
El bıpedo Scout esta constituido por piernas deseis eslabones unidas entre sı mediante un eslaboncentral al que, equiparando la arquitectura del robotcon la anatomıa del ser humano, se le denomina tor-so. Sus trece eslabones se conectan en serie a travesde juntas rotacionales actuadas por servomotores.
Derechos Reservados c⃝ 2011, SOMIM
A1_213
ISBN: 978-607-95309-5-2 << pag. 358 >>
MEMORIAS DEL XVII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM21 al 23 DE SEPTIEMBRE, 2011 SAN LUIS POTOSI, MEXICO
Figura 1: Robot bıpedo Scout de LynxmotionⓇ.
Para identificar a cada eslabon de manera in-equıvoca se establece la siguiente nomenclatura:
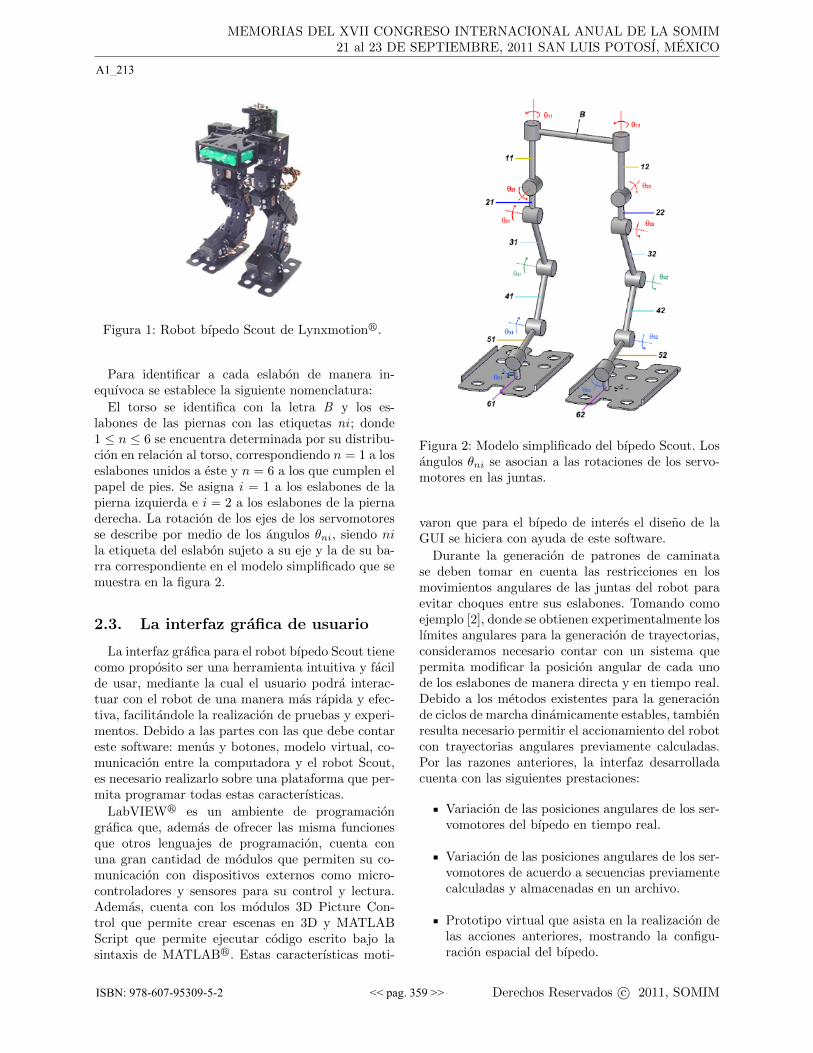
El torso se identifica con la letra B y los es-labones de las piernas con las etiquetas ni ; donde1 ≤ n ≤ 6 se encuentra determinada por su distribu-cion en relacion al torso, correspondiendo n = 1 a loseslabones unidos a este y n = 6 a los que cumplen elpapel de pies. Se asigna i = 1 a los eslabones de lapierna izquierda e i = 2 a los eslabones de la piernaderecha. La rotacion de los ejes de los servomotoresse describe por medio de los angulos �ni, siendo nila etiqueta del eslabon sujeto a su eje y la de su ba-rra correspondiente en el modelo simplificado que semuestra en la figura 2.
2.3. La interfaz grafica de usuario
La interfaz grafica para el robot bıpedo Scout tienecomo proposito ser una herramienta intuitiva y facilde usar, mediante la cual el usuario podra interac-tuar con el robot de una manera mas rapida y efec-tiva, facilitandole la realizacion de pruebas y experi-mentos. Debido a las partes con las que debe contareste software: menus y botones, modelo virtual, co-municacion entre la computadora y el robot Scout,es necesario realizarlo sobre una plataforma que per-mita programar todas estas caracterısticas.
LabVIEWⓇ es un ambiente de programaciongrafica que, ademas de ofrecer las misma funcionesque otros lenguajes de programacion, cuenta conuna gran cantidad de modulos que permiten su co-municacion con dispositivos externos como micro-controladores y sensores para su control y lectura.Ademas, cuenta con los modulos 3D Picture Con-trol que permite crear escenas en 3D y MATLABScript que permite ejecutar codigo escrito bajo lasintaxis de MATLABⓇ. Estas caracterısticas moti-
Figura 2: Modelo simplificado del bıpedo Scout. Losangulos �ni se asocian a las rotaciones de los servo-motores en las juntas.
varon que para el bıpedo de interes el diseno de laGUI se hiciera con ayuda de este software.
Durante la generacion de patrones de caminatase deben tomar en cuenta las restricciones en losmovimientos angulares de las juntas del robot paraevitar choques entre sus eslabones. Tomando comoejemplo [2], donde se obtienen experimentalmente loslımites angulares para la generacion de trayectorias,consideramos necesario contar con un sistema quepermita modificar la posicion angular de cada unode los eslabones de manera directa y en tiempo real.Debido a los metodos existentes para la generacionde ciclos de marcha dinamicamente estables, tambienresulta necesario permitir el accionamiento del robotcon trayectorias angulares previamente calculadas.Por las razones anteriores, la interfaz desarrolladacuenta con las siguientes prestaciones:
Variacion de las posiciones angulares de los ser-vomotores del bıpedo en tiempo real.
Variacion de las posiciones angulares de los ser-vomotores de acuerdo a secuencias previamentecalculadas y almacenadas en un archivo.
Prototipo virtual que asista en la realizacion delas acciones anteriores, mostrando la configu-racion espacial del bıpedo.
Derechos Reservados c⃝ 2011, SOMIM
A1_213
ISBN: 978-607-95309-5-2 << pag. 359 >>
MEMORIAS DEL XVII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM21 al 23 DE SEPTIEMBRE, 2011 SAN LUIS POTOSI, MEXICO
3. Desarrollo
3.1. Descripcion de la interfaz grafica
Con el objetivo de separar las funciones de la in-terfaz y distribuir los elementos del panel frontal demanera homogenea se uso el contenedor Tab Con-trol, el cual permite mostrar diferente informacionde acuerdo a la pestana seleccionada por el usuario.Se crearon tres pestanas:
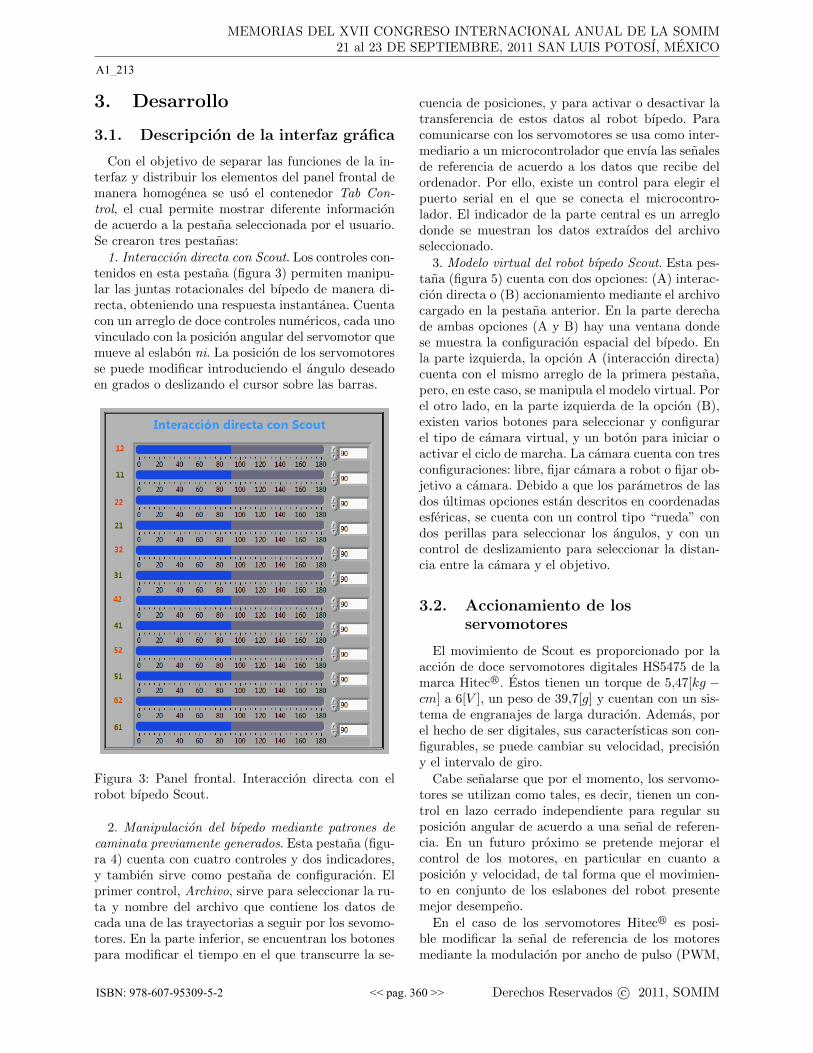
1. Interaccion directa con Scout. Los controles con-tenidos en esta pestana (figura 3) permiten manipu-lar las juntas rotacionales del bıpedo de manera di-recta, obteniendo una respuesta instantanea. Cuentacon un arreglo de doce controles numericos, cada unovinculado con la posicion angular del servomotor quemueve al eslabon ni. La posicion de los servomotoresse puede modificar introduciendo el angulo deseadoen grados o deslizando el cursor sobre las barras.
Figura 3: Panel frontal. Interaccion directa con elrobot bıpedo Scout.
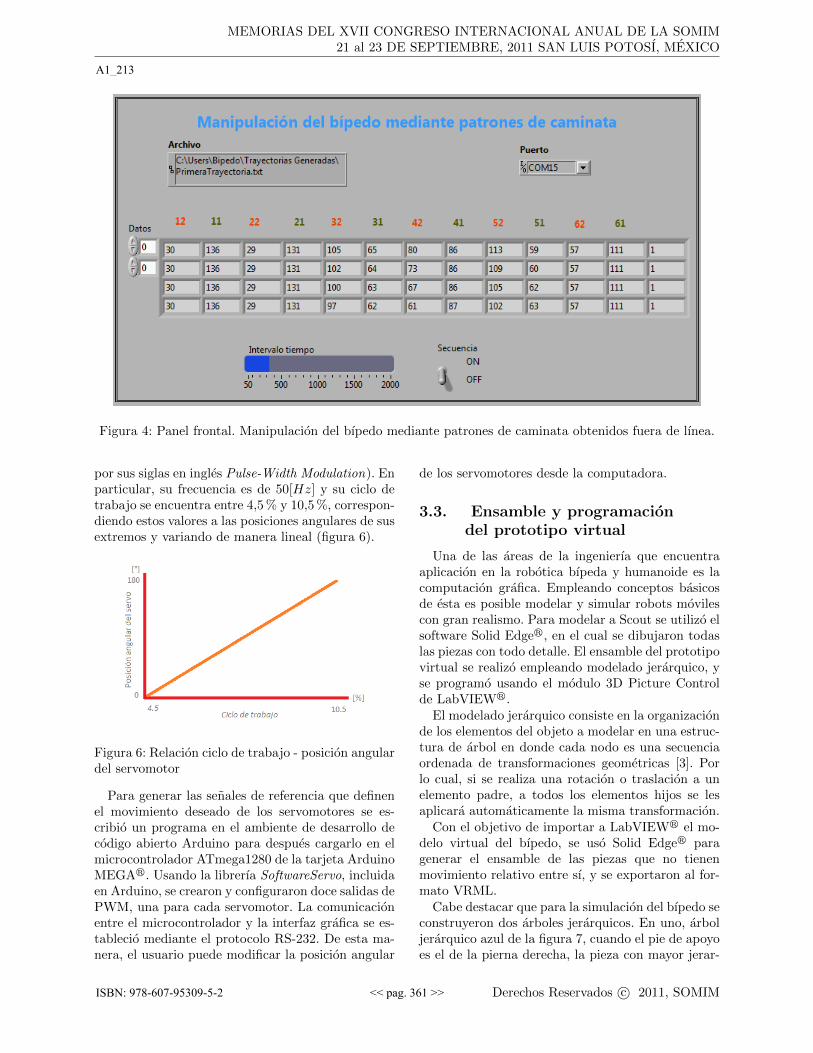
2. Manipulacion del bıpedo mediante patrones decaminata previamente generados. Esta pestana (figu-ra 4) cuenta con cuatro controles y dos indicadores,y tambien sirve como pestana de configuracion. Elprimer control, Archivo, sirve para seleccionar la ru-ta y nombre del archivo que contiene los datos decada una de las trayectorias a seguir por los sevomo-tores. En la parte inferior, se encuentran los botonespara modificar el tiempo en el que transcurre la se-
cuencia de posiciones, y para activar o desactivar latransferencia de estos datos al robot bıpedo. Paracomunicarse con los servomotores se usa como inter-mediario a un microcontrolador que envıa las senalesde referencia de acuerdo a los datos que recibe delordenador. Por ello, existe un control para elegir elpuerto serial en el que se conecta el microcontro-lador. El indicador de la parte central es un arreglodonde se muestran los datos extraıdos del archivoseleccionado.
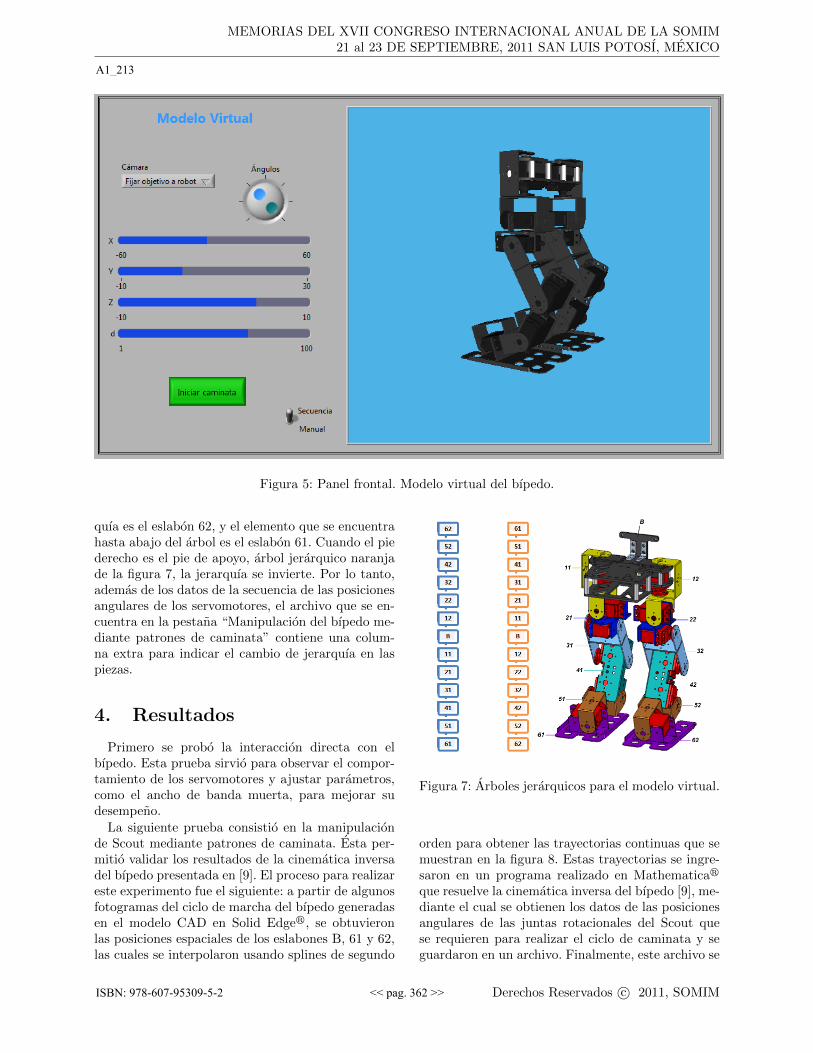
3. Modelo virtual del robot bıpedo Scout. Esta pes-tana (figura 5) cuenta con dos opciones: (A) interac-cion directa o (B) accionamiento mediante el archivocargado en la pestana anterior. En la parte derechade ambas opciones (A y B) hay una ventana dondese muestra la configuracion espacial del bıpedo. Enla parte izquierda, la opcion A (interaccion directa)cuenta con el mismo arreglo de la primera pestana,pero, en este caso, se manipula el modelo virtual. Porel otro lado, en la parte izquierda de la opcion (B),existen varios botones para seleccionar y configurarel tipo de camara virtual, y un boton para iniciar oactivar el ciclo de marcha. La camara cuenta con tresconfiguraciones: libre, fijar camara a robot o fijar ob-jetivo a camara. Debido a que los parametros de lasdos ultimas opciones estan descritos en coordenadasesfericas, se cuenta con un control tipo “rueda” condos perillas para seleccionar los angulos, y con uncontrol de deslizamiento para seleccionar la distan-cia entre la camara y el objetivo.
3.2. Accionamiento de losservomotores
El movimiento de Scout es proporcionado por laaccion de doce servomotores digitales HS5475 de lamarca HitecⓇ. Estos tienen un torque de 5,47[kg −cm] a 6[V ], un peso de 39,7[g] y cuentan con un sis-tema de engranajes de larga duracion. Ademas, porel hecho de ser digitales, sus caracterısticas son con-figurables, se puede cambiar su velocidad, precisiony el intervalo de giro.
Cabe senalarse que por el momento, los servomo-tores se utilizan como tales, es decir, tienen un con-trol en lazo cerrado independiente para regular suposicion angular de acuerdo a una senal de referen-cia. En un futuro proximo se pretende mejorar elcontrol de los motores, en particular en cuanto aposicion y velocidad, de tal forma que el movimien-to en conjunto de los eslabones del robot presentemejor desempeno.
En el caso de los servomotores HitecⓇ es posi-ble modificar la senal de referencia de los motoresmediante la modulacion por ancho de pulso (PWM,
Derechos Reservados c⃝ 2011, SOMIM
A1_213
ISBN: 978-607-95309-5-2 << pag. 360 >>
MEMORIAS DEL XVII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM21 al 23 DE SEPTIEMBRE, 2011 SAN LUIS POTOSI, MEXICO
Figura 4: Panel frontal. Manipulacion del bıpedo mediante patrones de caminata obtenidos fuera de lınea.
por sus siglas en ingles Pulse-Width Modulation). Enparticular, su frecuencia es de 50[Hz] y su ciclo detrabajo se encuentra entre 4,5 % y 10,5 %, correspon-diendo estos valores a las posiciones angulares de susextremos y variando de manera lineal (figura 6).
Figura 6: Relacion ciclo de trabajo - posicion angulardel servomotor
Para generar las senales de referencia que definenel movimiento deseado de los servomotores se es-cribio un programa en el ambiente de desarrollo decodigo abierto Arduino para despues cargarlo en elmicrocontrolador ATmega1280 de la tarjeta ArduinoMEGAⓇ. Usando la librerıa SoftwareServo, incluidaen Arduino, se crearon y configuraron doce salidas dePWM, una para cada servomotor. La comunicacionentre el microcontrolador y la interfaz grafica se es-tablecio mediante el protocolo RS-232. De esta ma-nera, el usuario puede modificar la posicion angular
de los servomotores desde la computadora.
3.3. Ensamble y programaciondel prototipo virtual
Una de las areas de la ingenierıa que encuentraaplicacion en la robotica bıpeda y humanoide es lacomputacion grafica. Empleando conceptos basicosde esta es posible modelar y simular robots movilescon gran realismo. Para modelar a Scout se utilizo elsoftware Solid EdgeⓇ, en el cual se dibujaron todaslas piezas con todo detalle. El ensamble del prototipovirtual se realizo empleando modelado jerarquico, yse programo usando el modulo 3D Picture Controlde LabVIEWⓇ.
El modelado jerarquico consiste en la organizacionde los elementos del objeto a modelar en una estruc-tura de arbol en donde cada nodo es una secuenciaordenada de transformaciones geometricas [3]. Porlo cual, si se realiza una rotacion o traslacion a unelemento padre, a todos los elementos hijos se lesaplicara automaticamente la misma transformacion.
Con el objetivo de importar a LabVIEWⓇ el mo-delo virtual del bıpedo, se uso Solid EdgeⓇ paragenerar el ensamble de las piezas que no tienenmovimiento relativo entre sı, y se exportaron al for-mato VRML.
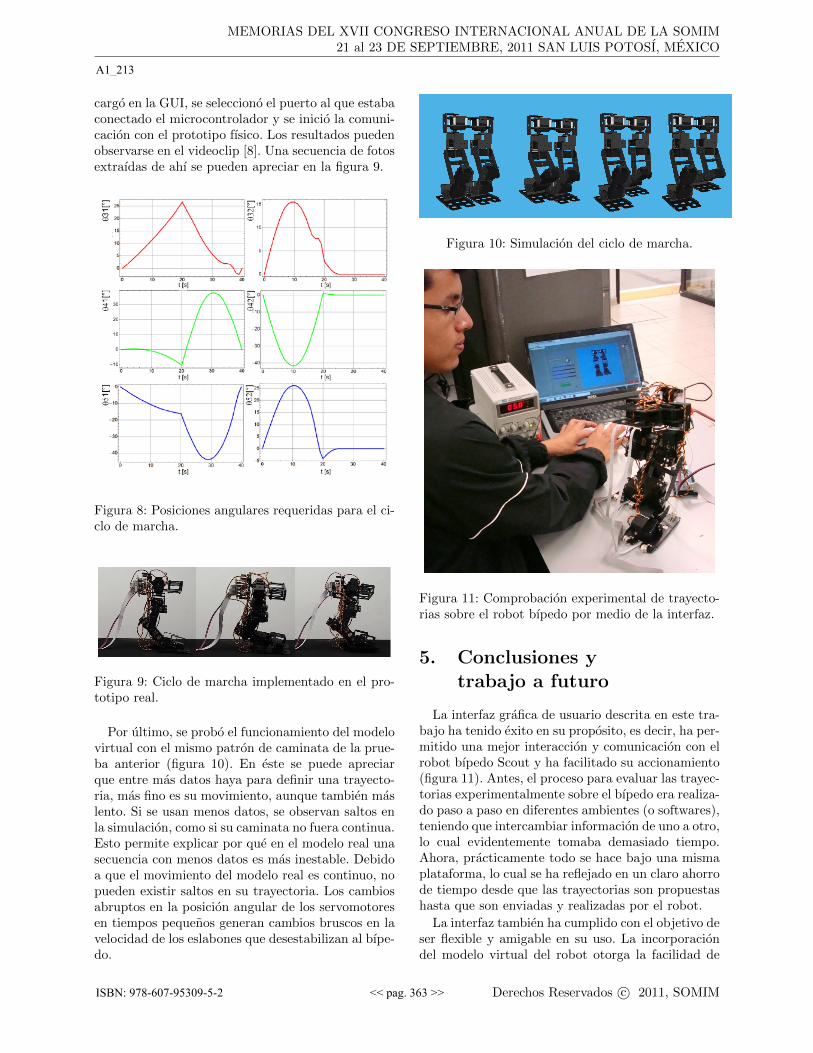
Cabe destacar que para la simulacion del bıpedo seconstruyeron dos arboles jerarquicos. En uno, arboljerarquico azul de la figura 7, cuando el pie de apoyoes el de la pierna derecha, la pieza con mayor jerar-
Derechos Reservados c⃝ 2011, SOMIM
A1_213
ISBN: 978-607-95309-5-2 << pag. 361 >>
MEMORIAS DEL XVII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM21 al 23 DE SEPTIEMBRE, 2011 SAN LUIS POTOSI, MEXICO
Figura 5: Panel frontal. Modelo virtual del bıpedo.
quıa es el eslabon 62, y el elemento que se encuentrahasta abajo del arbol es el eslabon 61. Cuando el piederecho es el pie de apoyo, arbol jerarquico naranjade la figura 7, la jerarquıa se invierte. Por lo tanto,ademas de los datos de la secuencia de las posicionesangulares de los servomotores, el archivo que se en-cuentra en la pestana “Manipulacion del bıpedo me-diante patrones de caminata” contiene una colum-na extra para indicar el cambio de jerarquıa en laspiezas.
4. Resultados
Primero se probo la interaccion directa con elbıpedo. Esta prueba sirvio para observar el compor-tamiento de los servomotores y ajustar parametros,como el ancho de banda muerta, para mejorar sudesempeno.
La siguiente prueba consistio en la manipulacionde Scout mediante patrones de caminata. Esta per-mitio validar los resultados de la cinematica inversadel bıpedo presentada en [9]. El proceso para realizareste experimento fue el siguiente: a partir de algunosfotogramas del ciclo de marcha del bıpedo generadasen el modelo CAD en Solid EdgeⓇ, se obtuvieronlas posiciones espaciales de los eslabones B, 61 y 62,las cuales se interpolaron usando splines de segundo
Figura 7: Arboles jerarquicos para el modelo virtual.
orden para obtener las trayectorias continuas que semuestran en la figura 8. Estas trayectorias se ingre-saron en un programa realizado en MathematicaⓇ
que resuelve la cinematica inversa del bıpedo [9], me-diante el cual se obtienen los datos de las posicionesangulares de las juntas rotacionales del Scout quese requieren para realizar el ciclo de caminata y seguardaron en un archivo. Finalmente, este archivo se
Derechos Reservados c⃝ 2011, SOMIM
A1_213
ISBN: 978-607-95309-5-2 << pag. 362 >>
MEMORIAS DEL XVII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM21 al 23 DE SEPTIEMBRE, 2011 SAN LUIS POTOSI, MEXICO
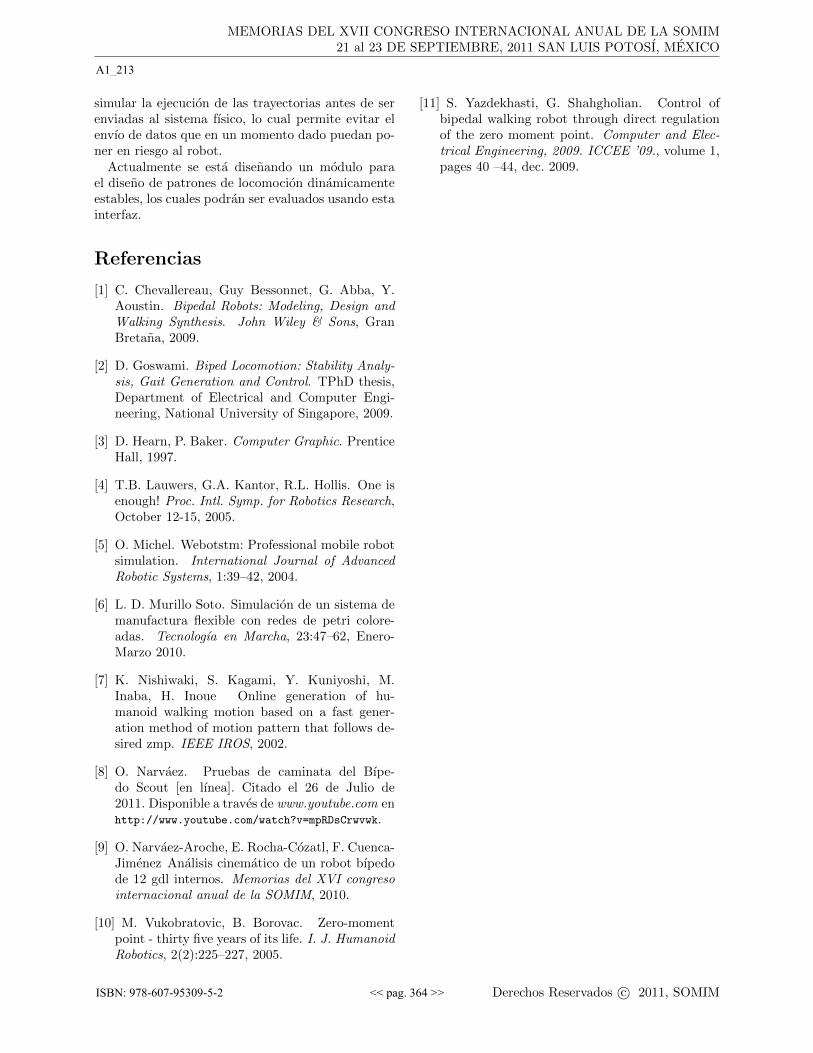
cargo en la GUI, se selecciono el puerto al que estabaconectado el microcontrolador y se inicio la comuni-cacion con el prototipo fısico. Los resultados puedenobservarse en el videoclip [8]. Una secuencia de fotosextraıdas de ahı se pueden apreciar en la figura 9.
Figura 8: Posiciones angulares requeridas para el ci-clo de marcha.
Figura 9: Ciclo de marcha implementado en el pro-totipo real.
Por ultimo, se probo el funcionamiento del modelovirtual con el mismo patron de caminata de la prue-ba anterior (figura 10). En este se puede apreciarque entre mas datos haya para definir una trayecto-ria, mas fino es su movimiento, aunque tambien maslento. Si se usan menos datos, se observan saltos enla simulacion, como si su caminata no fuera continua.Esto permite explicar por que en el modelo real unasecuencia con menos datos es mas inestable. Debidoa que el movimiento del modelo real es continuo, nopueden existir saltos en su trayectoria. Los cambiosabruptos en la posicion angular de los servomotoresen tiempos pequenos generan cambios bruscos en lavelocidad de los eslabones que desestabilizan al bıpe-do.
Figura 10: Simulacion del ciclo de marcha.
Figura 11: Comprobacion experimental de trayecto-rias sobre el robot bıpedo por medio de la interfaz.
5. Conclusiones ytrabajo a futuro
La interfaz grafica de usuario descrita en este tra-bajo ha tenido exito en su proposito, es decir, ha per-mitido una mejor interaccion y comunicacion con elrobot bıpedo Scout y ha facilitado su accionamiento(figura 11). Antes, el proceso para evaluar las trayec-torias experimentalmente sobre el bıpedo era realiza-do paso a paso en diferentes ambientes (o softwares),teniendo que intercambiar informacion de uno a otro,lo cual evidentemente tomaba demasiado tiempo.Ahora, practicamente todo se hace bajo una mismaplataforma, lo cual se ha reflejado en un claro ahorrode tiempo desde que las trayectorias son propuestashasta que son enviadas y realizadas por el robot.
La interfaz tambien ha cumplido con el objetivo deser flexible y amigable en su uso. La incorporaciondel modelo virtual del robot otorga la facilidad de
Derechos Reservados c⃝ 2011, SOMIM
A1_213
ISBN: 978-607-95309-5-2 << pag. 363 >>
MEMORIAS DEL XVII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM21 al 23 DE SEPTIEMBRE, 2011 SAN LUIS POTOSI, MEXICO
simular la ejecucion de las trayectorias antes de serenviadas al sistema fısico, lo cual permite evitar elenvıo de datos que en un momento dado puedan po-ner en riesgo al robot.
Actualmente se esta disenando un modulo parael diseno de patrones de locomocion dinamicamenteestables, los cuales podran ser evaluados usando estainterfaz.
Referencias
[1] C. Chevallereau, Guy Bessonnet, G. Abba, Y.Aoustin. Bipedal Robots: Modeling, Design andWalking Synthesis. John Wiley & Sons, GranBretana, 2009.
[2] D. Goswami. Biped Locomotion: Stability Analy-sis, Gait Generation and Control. TPhD thesis,Department of Electrical and Computer Engi-neering, National University of Singapore, 2009.
[3] D. Hearn, P. Baker. Computer Graphic. PrenticeHall, 1997.
[4] T.B. Lauwers, G.A. Kantor, R.L. Hollis. One isenough! Proc. Intl. Symp. for Robotics Research,October 12-15, 2005.
[5] O. Michel. Webotstm: Professional mobile robotsimulation. International Journal of AdvancedRobotic Systems, 1:39–42, 2004.
[6] L. D. Murillo Soto. Simulacion de un sistema demanufactura flexible con redes de petri colore-adas. Tecnologıa en Marcha, 23:47–62, Enero-Marzo 2010.
[7] K. Nishiwaki, S. Kagami, Y. Kuniyoshi, M.Inaba, H. Inoue Online generation of hu-manoid walking motion based on a fast gener-ation method of motion pattern that follows de-sired zmp. IEEE IROS, 2002.
[8] O. Narvaez. Pruebas de caminata del Bıpe-do Scout [en lınea]. Citado el 26 de Julio de2011. Disponible a traves de www.youtube.com enhttp://www.youtube.com/watch?v=mpRDsCrwvwk.
[9] O. Narvaez-Aroche, E. Rocha-Cozatl, F. Cuenca-Jimenez Analisis cinematico de un robot bıpedode 12 gdl internos. Memorias del XVI congresointernacional anual de la SOMIM, 2010.
[10] M. Vukobratovic, B. Borovac. Zero-momentpoint - thirty five years of its life. I. J. HumanoidRobotics, 2(2):225–227, 2005.
[11] S. Yazdekhasti, G. Shahgholian. Control ofbipedal walking robot through direct regulationof the zero moment point. Computer and Elec-trical Engineering, 2009. ICCEE ’09., volume 1,pages 40 –44, dec. 2009.
Derechos Reservados c⃝ 2011, SOMIM
A1_213
ISBN: 978-607-95309-5-2 << pag. 364 >>





























