Embed Size (px)
Citation preview

INTELLIGENTTRANSPORTATION
SYSTEMShttp://www.ieee.org/its
IEEE ITS SOCIETY NEWSLETTEREditor: Prof. Bart van Arem, [email protected]
Vol. 8, No. 3, September 2006
In This Issue
Society News 3Message from the Editor: Bart van Arem . . . . . . . . . 3Message from the VP Adminstrative Activities 2006:
Daniel J. Dailey: . . . . . . . . . . . . . . . . . . . . 3Message VP Member Activities: Christoph Stiller . . . . . 11Message VP Publications: Jason Geng . . . . . . . . . . . 12IEEE Trans. on ITS Report: Alberto Broggi . . . . . . . 16IEEE Transactions on ITS - Index: Simona Berte . . . . . 18
Conference Reports 24
Technical Contributions 25A Portable Real-Time Lane Departure Warning System
based on Embedded Calculating Technique, by Pei-Yung Hsiao and Chun-Wei Yeh . . . . . . . . . . . . 25
Research Programs 33Research Review, by Angelos Amditis . . . . . . . . . . . 33
Announcements 38
Conferences, Workshops, Symposia 39By Massimo Bertozzi and Alessandra Fascioli . . . . . . . 39
Web ArchiveAll past issues of this Newsletter can be reached through the Society’s OfficialWeb Site at: http://www.ieee.org/its
Electronic Newsletter SubscriptionTo obtain a free short announcement in your e-mail as soon as the nextNewsletter issue is available, please sign in through the Society Web Site at:http://www.ieee.org/its
The IEEE ITS Society Newsletter is published 4 times per year andis sent to over 10,000 subscribed ITS professionals from industry, academiaand government.
ITSS Newsletter Editorial Board————–
Editor-chief:Bart van Arem,
. . . . . . . . [email protected]
Editorial assistant:Dorette Alink-Olthof,
. . . [email protected]
————–Associate editors:
IEEE Transactions on ITS reportand abstracts:
Alberto Broggi and Simona Berte,. . . . . . . . [email protected]
Technical contributions:Brian Park, . . . . . . . [email protected]
Book reviews:Algirdas Pakstas,
. . . [email protected]
Conferences, workshops and journals:Alessandra Fascioli and Massimo Bertozzi,
. . . . . . . . [email protected]
Research programs:Angelos Amditis, . . . [email protected]
Information for contributors————–
Announcements, feature articles, booksand meetings reviews, opinions, letters tothe editor, professional activities, abstractsof reports, and other material of interest tothe ITS community is solicited.
Please submit electronic material for con-sideration in any of the following formats:LATEX, plain ASCII, PDF, or Word, and pic-tures seperately in jpeg format to the Edi-tor at [email protected] as well as tothe assistant [email protected]
at least 1 month prior to the newsletter’sdistribution:
Issue Due dateMarch February 1st
June May 1st
September August 1st
December November 1st
1

THEIEEE INTELLIGENT TRANSPORTATION SYSTEMS
SOCIETY——————————————
President: . . . . . . . . . . . . . . . . . . . . . .Fei-Yue Wang, CAS, China and U. of Arizona, Tucson, AZ 85721, USA
Immediate Past President: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Charles J. Herget, Alameda, CA 94502, USA
Vice President Conferences: . . . . . .Umit Ozguner, Ohio State University, Columbus, OH 43210, USA
Vice President Publications: . . . . . . . . . . . . . . . . . . . . . . . . . . Jason Geng, Rockville, MD 20895-2504, USA
Vice President Finance: . . . . . William Scherer, University of Virginia, Charlottesville, VA 22904. USA
Vice President Technical Activities: . . . . . . . . . . . . . . . . . . Daniel Zeng, University of Arizona, Tucson,
AZ 85721, USAVice President Administrative Activities: . . . . . .Daniel J. Daily, University of Washington, Seattle,
WA 98195, USATransactions Editor: . . . . . . . . . . . . . . . . . . . . . Alberto Broggi, Universita di Parma, Parma, I-43100, Italy
Newsletter Editor: . . . Bart van Arem, University of Twente, Enschede, NL-7500AE, The Netherlands
COMMITTEES
Awards Committee: Chip White (Chair): . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . [email protected]
Conferences and Meetings Committee: Umit Ozguner (Chair): . . . . . . . . . . . . . . [email protected]
Constitution and Bylaws Committee: Daniel J. Dailey (Chair): . . . . . . . . . . . . . . . [email protected]
Fellow Evaluation Committee: Robert Fenton (Chair): . . . . . . . . . . . . . . . . . . . . . . . . . [email protected]
Finance Committee: Bill Scherer (Chair): . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . [email protected]
History Committee: E. Ryerson Case (Chair): . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . [email protected]
Long Range Planning Committee: Pitu B. Mirchandani (Chair): . . . . . . . . . . . [email protected]
Member Activities Committee: Christoph Stiller (Chair): . . . . . . . . . . . . . . . . . . . . . [email protected]
Nominations and Appointments Committee: Charles Herget (Chair): . . . . . . . . . . [email protected]
Publications Committee: Jason Geng (Chair): . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . [email protected]
Standards Committee: Jason Geng (Chair): . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . [email protected]
Student Activities Committee: Sudarshan S. Chawathe (Chair): . . . . . . . . . . . . . . . . . [email protected]
Technical Activities Committee: Daniel Zeng (Chair): . . . . . . . . . . . . . . . . . . . [email protected]
2

Society News
From the Editorby Bart van Arem
Dear reader of this newsletter,
I am pleased to present to you the 3rd Newsletter this year, which will be sent in the same period ofour ITSC Conference in Toronto. If you have visited the conference I hope you enjoyed it. In this newsletteryou will find our regular features. I want to draw your attention to two specific parts of the newsletter. First,you will find short biographies of the candidates for the next election for the Board of Governors (BOG)of our ITS Society. Members of the ITS Society can vote using the ballots that you will receive by mail.Second, we have extended the section of the Transaction on ITS. You are used to the fact that we publish thetitles and abstracts of the upcoming issue of the Transactions. In addition, you will also find direct Internetto the papers of past issues, which will allow you to direcly download the papers. As always, we are eagerto receive contributions to the newsletter, which you can send to me or other members of the editorial board.
I hope you enjoy reading this newsletter!
Bart van Arem
Message from the VP Administrative Activities 2006by Daniel J. Dailey
Within the coming months new elections will be held for members of the Board of Governors of the ITSSociety.
The nominations committee is nominating the following persons as candidates for the BOG.
Members of the ITS society will receive a mail ballot to vote for the BOG.
3

Candidates for BOG electionHironao Kawashima
Hironao Kawashima was born in Tokyo, Japan, on May 13,1944. He re-ceived the B. Sc., M. Sc. and Ph. D. degrees in Administration Engineeringfrom Keio University, Yokohama, Japan, in 1968, 1970 and 1974, respec-tively.
Since 1972, he has been with the Department of Administration Engineer-ing Keio University, where he is now a Professor.
From 1974 to 1979, he participated in the CACS project of MITI to design thesoftware of data processing and to evaluate the performances of route guid-ance system. Since then he has been involved in many research committeesof public-private joint projects related to ITS in Japan. Since 1998, he is anactive member of committees related to the national project called ”Smartway” and involved in the ASV(Advanced Safety Vehicle) project since 1996.
From 1989 to 1992, he was the chairman of the Scientific Expert Group of OECD RTR called ”Advancedlogistics and communications in road freight transport operations” and the co-chairman of the group called”Integrated advanced logistics and innovations in freight transport” from 1993 to 1995 and the co-chairmanof the group called ”Trilateral Logistics Projects” from 1996 to 2000. He is the chairman of Japanese Com-mittee of ISO/TC204 ”Intelligent Transport Systems” from 1993 and Vice Chair of ISO/ TC204 from 2006.
Dr. Kawashima is a member of The Information Processing Society of Japan, the Operations ResearchSociety of Japan, The Society of Instrument and Control Engineers, Human Engineering Society of Japan,The Japan Society of Traffic Engineers, International Association of Traffic and Safety Sciences, Japan So-ciety of Civil Engineers and The Institute of Electronics, Information and Communication Engineers.
Mike McDonald
DirectorTransportation Research GroupSchool of Civil Engineering and the EnvironmentUniversity of SouthamptonHighfieldSOUTHAMPTON SO17 1BJUNITED KINGDOMTel +44 23 8059 2192Fax +44 23 8059 3152Email [email protected] http://www.trg.soton.ac.uk
Academic Qualifications
B.Sc. (Civil Engineering, University of Newcastle Upon Tyne, 1964 67).Ph.D. (Civil Engineering, University of Southampton, 1981).CEng (Chartered Engineer) Fellow of the Institution of Civil Engineers (FICE).Fellow of the Chartered Institute of Logistics and Transport (FCILT).
4

Current Research Interests
Professor Michael McDonald has been Director of the Transportation Research Group at the Universityof Southampton since 1982 and was Head of the Department of Civil and Environmental Engineering 1996-99. Professor McDonald has been responsible for some 100 research contracts for the Transport ResearchLaboratory, Department for Transport, Engineering and Physical Sciences Research Council, the EuropeanUnion and other local and central government agencies. The areas of research have covered many aspectsof transport planning, traffic engineering and control, application of new technology, safety, highway design,economic appraisal and evaluation and he has over 100 publications in these areas. He has been a memberof several professional and government committees and advisory bodies including the Research Councils andthe Technology Foresight Programme. He has been significantly involved with the EC Transport Telematicsprogrammes and has international recognition as an expert in Intelligent Transport Systems. Professor Mc-Donald is a Fellow of the Institution of Civil Engineers and a Fellow of the Chartered Institute of Logisticsand Transport.
Other Current and Recent Activities
o Vice-Chair of the European Road Transport Research Advisory Council (ERTRAC)o Founder Member and Chairman of ITS U.K., a multi sector group supported by the DETR and DTI
to promote transport technology in the U.K.o Member of COST 356 on Transport Sustainability.o EPSRC Land Transport LINK Panel Member.o Member of the EPSRC Built Environment Review Panel (1997).o Past Member of the Transport Panel of the Technology Foresight Programme. (Chairman of one of
the three Sub-Committees, responsible for implementing panel recommendations)o Chairman of the U.K. Universities Transport Studies Group (UTSG) (1996-1998).o External Advisor, Road and Vehicle Safety Research, DETRo Visiting Fellow for the Transport Research Foundationo Member of Foresight Vehicle Telematic Thematic Groupo Past Chair, ILT Road Pricing Working Partyo Chair of panel to review Highways Agency TOOLKIT projects and develop an appraisal process for
new applications.o Workplan co-ordinator, rapporteur and evaluator of European Commission 3rd, 4th and 5th Framework
ITS activities. (Chaired several evaluation and review processes.)o Expert Advisor for HA Outward Facing Research Programme.o External Advisor to Transport Chairs at Imperial College, Newcastle, Leeds, Dublin and elsewhere.o Keynote speaker at international meetings in Japan and China.o Leader of major multi-sector transport projects in UK and overseas.
5

Reinhard Pfliegl
MS (Physics) degree Technical University Vienna / Austria, 1972PhD (Technical Science) Technical University Vienna, 1978MS (Higher Education Mathematics, Chemistry, Physics) University Vienna,1974Honorary Prof. Technical University Varna, Bulgaria, 2002Managing Director- AustriaTech- Federal Agency for Technological MeasuresLtd. Vienna / AustriaFrom 1972 - 1974 research engineer at Technical University- Institute for Ex-perimental Physics experimenting on photo effects in CdS.From 1974 - 1980 Assistant Professor Technical University Vienna, Institutefor Experimental Phisics leading a research project of National Academy ofScience dealing with long wave X- Ray analysis for the electron structure of metals ( first computer au-tomized experiment on our faculty). In 1980 he joined the Austrian branch of ITT developing new digitalpublic telecom systems (operator services). In 1984 he took the lead in CAD (Computer aided design) -department for electronic circuit design and simulation on chips and printed circuit boards. This started arevolutionary reduction on design lead time for telecom development. In 1987 he joined ALCATEL whichtook over the telecom activities of ITT. He started with the new formed Broadband Communication Divisionintroducing new technologies (ATM, SDH, MAN, etc.) for public telecom operators. In this position he wasresponsible for applications development and field operations. In 1993 he joined the Transport Devision ofALCATEL in order to build up a new department for ITS applications (cellular radio application for track-ing and tracing of goods, tolling systems, fleet management systems, logistics information services for goodstransport, management systems for public transit operators). In 2000 he hired at via donau, a public agencypromoting inland waterway transport. He was responsible for the design and development of a new trafficmanagement system on inland waterways ”River Information Services”, which has been the first operatingsystem in inland waterways world wide and now is the technical standard for similar systems in Europe andoutside Europe. In 2004 he become elected member of the Inland Waterway Committee (AW020) at TRBin honor of this results which have been published in many articles world wide.
In 2005 the Austrian Ministry of Transport, Innovation and Technology established a new agency- Aus-triaTech, for the development of advanced ITS applications on road, rail and waterways in which he now actas Managing Director since then. This agency has been formed to develop and promote new technologiesand applications in the transport sector in Austria and to push the deployment of ITS into the infrastructure.
He has been and is a member of many European research Projects on ITS since 1994 in the area of transportlogistics, vehicle technologies and Intelligent Infrastructure. Actually he is the co- ordinator of a Europeanresearch project on co- operative systems on road based on Infrastructure- vehicle communication.
In 2001 he was founder of ITS- Education at University of Applied Sciences, Technikum Vienna, wherefirst graduated students have finished 2006. In 2002 he was co- founder of Transport Logistics Studies atUniversity of applied Science, bfi Vienna. He serves as University lector at University Krems, University ofApplied Sciences, Technikum Vienna.
He was general chair of IEEE- ITSC 05, Vienna with about 380 participants, the first after the ITS Councilbecomes a Society.
Reinhard Pfliegl is the author and co- ordinator of the Austrian national Telematics Masterplan published2004 by the Ministry of Transport, Innovation and Technology. He is actual chair of the scientific board ofArsenal Research- a non university research organisation.
He is vice chair of the Committee 220 (ITS) of the National Standards Institute and Member of CENTC 278- ITS (European Standards Institute) and Member of ITS Society, VTS since 2001.
6

Robin G. Qui
Robin G. Qiu received the M.S. and B.S. degrees from Beijing Institute ofTechnology, Beijing, China, and the Ph.D. degree in Industrial and Manufac-turing Engineering and the Ph.D. (minor) degree in Computer Science andEngineering from the Pennsylvania State University, University Park, in 1996.He joined Kulicke and Soffa Industries, Inc., Willow Grove, PA, USA in 1996as Sr. Software Engineer. He then held a position as the Chief Architect ofCIMS Projects. He was Sr. Computer Scientist at GHR Systems, Wayne,PA, USA. He joined Penn State in 2001. He is currently an Assistant Profes-sor of Information Science at the Pennsylvania State University, UniversityEndowed Professor of Beijing Institute of Technology, China, and Univer-sity Endowed Professor of College of Economy and Management, NanjingUniversity of Aeronautics and Astronautics, China. His research interests include services operations andinformatics, component business models and computing, business transformation and services innovations,automatic information retrievals (auto-IR), and control and management of manufacturing systems. He hashad about 90 publications including over 30 journal publications, 1 book, and 3 book-chapters. He editeda book entitled Enterprise Service Computing: From Concept to Deployment, published by Idea GroupPublishing, Oct. 2006. He currently serves as Associate Editor of IEEE Transactions on Systems, Man andCybernetics: Part A, Associate Editor of IEEE Transactions on Industrial Informatics, and Editor-in-Chiefof International Journal of Services Operations and Informatics.
By organizing a variety of scientific events, such as conferences, special sessions, workshops, and symposia, aswell as by editing publications, such as special journal issues, He helps the ITSS community promote researchand education agenda. He was the founder and General Chair of 2005 IEEE International Conference onService Operations and Logistics, and Informatics, Beijing, Aug. 10-12, 2005. He is a General Co-Chair of2006 IEEE International Conference on Service Operations and Logistics, and Informatics, Shanghai, June21-23, 2006 and the General Chair of 2007 International Conference on Flexible Automation and IntelligentManufacturing, Philadelphia, June 17-19, 2007. In total, he has organized and chaired over 30 technicalsessions and served on program committees for many international conferences and Guest Editors of manyinternational journals. He was the founding chair of Logistics and Services Technical Committee of IEEEITS Society. If he would be elected, he will work hard to raise the public $B!G (Bs awareness of ITSS, andhelp grow the ITSS further.
Tsuneo Takahashi
Tsuneo TakahashiPresident NF Corporation6-3-20,Tsunashima-higashi, Kohoku-ku, Yokohama 223-8508 JAPANPhone; +81-45-545-8101 Fax; +81-45-545-8188 E-mail;[email protected]
Experience
NF Corporation2004- Present President2002 -2004 Executive Vice President
Honda R&D Co., Ltd.1998-2002 Executive Chief EngineerManaged R&D activities in fields of ITS and Automotive IT
7

1996-1998 Executive Director of Honda R&D Americas, Inc.Established and managed the Fundamental Research Center in USA1992-1996 Executive Chief EngineerDeveloped, launched and managed various fundamental research projectssuch as Autonomous Driving Vehicle, Intelligent Commuter Vehicle System, Electric Vehicle and GaAs semi-conductor etc.1984-1992 Chief EngineerManaged Automotive Electronics Research DivisionDeveloped ”Transportation Information Systems”cooperated with National Police Agency and ”Road and Vehicle Communication stem” cooperated withMinistry of Construction1972-1984 Principal EngineerDeveloped the first Automotive Navigation System in JapanDeveloped various sensing and/or electronics technologies for automobiles
Professional Affiliation
The Institute of Electronics, Information and Communication EngineersMember of ITS Committee, Multi-dimensional mobile communication network committee IEEE Member ofITSC, AESS ?Society of Automotive Engineers of JapanMember of ITS Committee, Electronics Committee The Japan Society for Simulation TechnologyMember of Auto-design technology for Multi-dimensional communication network Committee The JapanSociety of Applied ScienceMember of the board of directors
Awards ”Award of Technology ” 1984, The Society of Instrument and Control Engineers ”Award of Achieve-ment” 1997, Society of Automotive Engineers of Japan
Education
University of Osaka B.S. in Electrical Engineering 1970
Shuming (Sharron) Tang
Shuming Tang (M’03) received her Ph.D degree in automatic control engineer-ing with the highest honor from the Chinese Academy of Sciences, Beijing,China. Currently, she is a Research Professor in the Institute of Automation,Shandong Academy of Sciences and Director of the Intelligent Control andSystems Engineering Center. She is also an Appointed Professor in Xi’anJiaotong University and Shandong University of Science and Technology. Herresearch interests are focused on intelligent transportation systems (ITS), au-tomation control, computational intelligence and complex systems, and arti-ficial transportation systems (ATS). She has published extensively in thoseareas.
Dr. Tang received the prestigious President’s Special Scholarship Award bythe CAS in 2005 (each year 20 awards are chosen from over 10,000 PhD dis-sertations across all research fields). Dr. Tang also received the TOP 50Best Dissertation Award in 2006 by CAS. Her dissertation was also recently nominated for the TOP 100Best Dissertation Award in China (out of roughly 60,000 PhD dissertations nation-wide; the results will beannounced in Spring 2007) and and the IEEE ITSS PhD Dissertation Award (results pending). She hasreceived several best student paper awards in international conferences in the ITS area. Dr, Tang is very
8

active professionally in the ITS research community. She is an Associate Editor of the IEEE Transactionson ITS and a member of the Board of Governors of the IEEE ITS Society. She is a co-Chair of the TechnicalCommittee on ATS of ITSS. She also played an instrumental role in forming two local ITSS chapters inChina. She can be reached at [email protected] or [email protected].
John R. Troxell
John R. Troxell is a staff research scientist with Delphi Electronics and Safety,located at Delphi Research Labs in Shelby Township, MI. Prior to the spin-offof Delphi from General Motors, John was with the General Motors ResearchLaboratories for 19 years. John earned a Ph.D. in Physics in 1979 from LehighUniversity.
His experience includes integrated circuit design and process development,the development and application of conventional and micromachined recon-figurable display image sources and their application to head up display sys-tems, CMOS imager design, and infrared imaging. He holds 15 United StatesPatents. He has authored 22 publications, and was a co-author on an ad-ditional 11. The reconfigurable head up displays used in the PATH 1997demonstration in San Diego used image sources that he co-developed.
Currently, he is involved in the development of imager system technology in support of several vehicle imagesensing systems. John is a member of the American Physical Society and the Society for Information Display.
John is a Senior Member of the IEEE, a member of the Electron Devices Society, and was the first ap-pointee of the Electron Devices Society to the Intelligent Transportation Systems Council.
He is a member of the Steering Committee for the IEEE-American Optical Society jointly-sponsored Journalof Display Technology.
He served on the Program Committee for the First ITS Council-sponsored ITS Conference in Boston, MA,1997. He continued to represent EDS on the ADCOM of the Intelligent Transportation Systems Councilthroughout its transition to a Society, and has served as an elected member of the Board of Governors ofthe Intelligent Transportation Systems Society from 2005-Present.
Bart van Arem
Prof Dr Bart van Arem holds a Master’s degree (1986) and PhD degree (1990) in Applied Mathematics,speciality queuing theory at the University of Twente, the Netherlands.
In 1991 he was engaged in modeling traffic flows at roundabouts for the Dutch Ministry of Transport PublicWorks and Water Management. He has worked as a researcher at TNO since 1992.
His main specialization is traffic flow modeling of advanced driver assistance systems. He worked in variousEC funded projects, e.g. CONVERGE on Guidelines for impact assessment, CARTALK on modelling oftraffic flow impact of vehicle-vehicle communication, PROSPER on the impact of speed assistance. He is aregular consultant to the Dutch Ministry of Transport on strategy and policy development, speed limits andadvanced driver assistance system.
In the 6FP of the EC he is working on different project on cooperative driver assistance systems (PRe-
9

VENT, SAFESPOT, CVIS, eImpact).
Since 2003 he is also a professor Application of Integrated Driver Assistance (AIDA) at the Universityof Twente and leading the knowledge centre AIDA.
He is a member of the eSafety Working Group on Research and Technological Development and the In-ternational Task Force Vehicle Highway Automation.
He is a member of the IEEE ITS Society and contributes to the Society as the Editor-in-chief of the electronicnewsletter and as the General Chair of the Intelligent Vehicles conference in 2008.
Andre Vits
Andre joined the European Commission in 1988 (actually General DirectorateInformation Society and Media) for the launch of the DRIVE programme (2ndFramework Programme for Research and Technological Development), aim-ing at promoting European collaborative research in transport and the use ofInformation and Communication Technologies (ICT) Further he took severalcoordination and management functions like the preparation of the TelematicApplications Program (FP4) and being Deputy Head of Unit for the FinancialService of the Directorate General.
End of 2001 Andre was nominated Head of the Transport and Tourism Unit.From January 2003 to mid September 2005 he was also acting Head of Unitfor activities related to environmental and crisis management research.
The ICT for Transport Unit is providing financial support to research projects in the European Union. Mainfocus in the last years was the development of active safety systems in road transport including co-operativesystems. The Unit is initiated and is responsible for the ”eSafety Initiative”, promoting the deployment ofICT technologies to reduce accidents on the roads. In February 2006, the ”Intelligent Car Initiative” waslaunched, bringing together policy, research and awareness activities under one umbrella.
Andre studied Electro-mechanical engineering at the University of Leuven (B) and holds a PhD in Ap-plied Sciences - Traffic engineering. Before joining the Commission he was Lecturer on ”Traffic Control andTransport Management” at the University of Leuven (B). Main focus of his research activities were trans-portation modelling, traffic control and urban traffic management schemes, as well as image processing. Healso conducted several studies on traffic safety, i.e. near accident analysis methodology.
10

Nanning Zheng)
Zheng Nanning (FM’07) graduated in 1975 from the Department of ElectricalEngineering, Xi’an Jiaotong University, Xi’an, China, and received the MEdegree in information and control engineering from Xi’an Jiaotong Univer-sity, Xi’an, China in 1981, and the Ph.D. degree in electrical engineering fromKeio University, Japan, in1985. He is currently a professor and the direc-tor of the Institute of Artificial Intelligence and Robotics at Xi’an JiaotongUniversity. Since August 2003, he has been the President of Xi’an JiaotongUniversity. He was elected a member of the Chinese Academy of Engineeringin 1999.
His research interests include computer vision, pattern recognition, intelligenttransportation, and vehicular electronics. Currently, he is the Chief Scientistand the director of the Information Technology Committee of the NationalHigh Technology Research and Development Program (863 Hi-Tech Program), a member of the AcademicDegree Commission of the State Council. He served as the general chair for the International Symposium onInformation Theory and Its Applications in 2002, the general co-chair for the International Symposium onNonlinear Theory and Its Applications in 2002, the general chair for the IEEE International Conference onVehicular Electronics and Safety in 2005, and the program chair for the International workshop on IntelligentComputing in Pattern Analysis and Synthesis in 2006. Since 2000, he has been China’s representative onthe Governing Board of the International Association for Pattern Recognition. He presently serves as anexecutive deputy editor of the Chinese Science Bulletin and is a member of the Experts Advisory Committeeof the Microsoft Asia Research Institute, and IEEE fellow.
Message from the VP Member Activitiesby Christoph Stiller
In the Newsletter in spring ITSS had announced the newly introduced IEEE ITSS Best Ph.D. DissertationAward. Our aim with this activity has been to support the career of outstanding young professionals byrecognizing PhD students who significantly contributed to our field.
We have received many proposals with outstanding dissertations and a selection committee of four expertshas been nominated. Each committee member first has ranked the submissions independently and based onthese rankings a clear consensus was at hand.
It is now my pleasure to congratulate the awardees of the ITSS Best Ph.D. Dissertation Award 2006:
Dr. Shuming (Sharron) Tang received the first prize for her Ph.D. Dissertation A Preliminary Study forBasic Approaches in Artificial Transportation Systems.
Dr. Jianlong Zhang received the second prize for his Ph.D. Dissertation Practical Adaptive Control: Theoryand Applications.
You may get a good impression of their work from their publications in the IEEE Transactions on In-
11

telligent Transportation Systems. The award certificates have been presented at the ITSC in Toronto andare accompanied by 1000 and 500, respectively.
By the way: The call for the ITSS Best Ph.D. Dissertation Award 2007 will be announced in the firstissue of this newsletter in 2007.
IEEE ITSS Membership: Opening the world of ITS Technology
IEEE Intelligent Transportation Systems Society: http://www.ewh.ieee.org/tc/its.
Message from the VP for Publicationsby Jason Geng
The ITS magazine is in its preparation stage and we manage to put together a trial issue to collect feedbackat ITSC2006 Toronto from ITS community.
I am including herein the cover page, TOC, and inaugural editorial of the trial issue ITS magazine asfollows. The full quarterly publication of the ITS magazine will start sometime next year.
12

13

Editor In Chief: Fei-Yue W ang
M anaging Editor: Jason Geng
Associate Editor In Chief: Bart van Arem
Editorial Board
Baher Abdulhai
Alberto Broggi
Sudarshan Chawathe
Benjamin Coifman
Daniel Dailey
Takaaki Hasegawa
Petros Ioannou
Brian Johnson
Ichiro Masaki
Urbano Nunes
Umit ozgwner
William Scherer
Christoph Stiller
Tsuneo Takahashi
Sharron Tang
John R. Troxell
Emily Sopensky
Steve E. W atkins
Daniel Zeng
Nanning Zheng
Opening Editorial 02
ITS Tutorial: Intelligent Highway 03
Message from VP of Publications 53
ITS Tutorial: Intelligent Vehicle 09
Feature article 15
Case Study: Major Industrial Projects 17
Lab Introduction: Major ITS Research Lab 20
ITS related Conference News 45
Gov View: Goverment Sponsored Project 24
Discovery of New Technology/Application 28
IEEE/Asme Mesa06 in BeiJing, CHINA 38
Conference Reports 39
ITS related Conference Call for papers 40
Society News and Community events 43
Second Call for papers 44
contents
Student corner 55
14

EDITEDITEDITEDITEDITORIALORIALORIALORIALORIAL
15

Report on IEEE Trans. on Intelligent Transportation Systemsby Alberto Broggi
Transactions EiC report, updated August 29, 2006
Thanks to the dedication and tremendous work of our large number of Associate Editors and reviewers,the IEEE Trans on ITS is in a very healthy state.
In 2006 we have incremented the page budget, which is the number of pages that are published per year.Starting from 360 pages in 2004, we first increased it to 432 and then to 480 in 2005, then we increased it to512 for 2006, but we had the need to increase it further during the year to 620. The prediction for 2007 isto reach 720 page, which actually means to double the number of pages that our journal had in 2004. Thisis a good sign showing that our Journal is attracting more and more authors every year.
From August 2006 we are using a new feature that IEEE Xplore is offering to all IEEE Journals: rapidposting. It is a great way of improving the dissemination of our papers in a timely fashion. As soon asa paper is ready to be published (authors have returned the proofs and IEEE staff has incorporated allrequested modifications) the paper does not need to sit for a long time waiting for a slot in a hardcopy issuein order to be published. The paper is published online on IEEE Xplore as soon as it is ready, so everyoneon the net can access the paper in its final format. The only information which is missing (and which isanyway useful for referencing the paper) is the volume, number, and issue on which it will appear in print.I’m sure this will improve the accessibility of our paper.
The following special issues are under way:
- special issue on Cooperative Intelligent Vehicles (guest editors: Ljubo Vlacic, Toshio Fukuda) (pub-lished in a special section in the December issue)
- special issue connected to IV05 (guest editor: Fei-Yue Wang)
- special issue connected to ICVES05 (guest editors: Nenning Zheng, Hironao Kawashima)
- special issue connected to ITSC05 (guest editors: Bart De Shutter, Andreas Hegyi)
- special issue on On-the-road Mobile Networks (guest editor: C.K.Toh)
The migration to ManuscriptCentral version 3.4 is still on hold and we are still waiting for information fromIEEE.
16

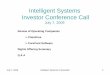
The attached figure shows: in blue the number of papers submitted in each month from April 2003 (whenwe switched to electronic submission), and in red the number of papers still without a decision; this meansthat either the first submission did not come to an end, or that a new revision is currently under evaluation.The figure shows that the trend is positive and, a part from isolated cases, all submitted papers receive anotification in a reasonably short time.
17

IEEE Trans. on Intelligent Transportation Systems - Indexby Simona Berte
We are happy to present you an extension of this section in which you normally can find the titles andabstracts of the upcoming issue of our Transactions. To go directly to the online Transactions Table ofContents, click on ”Index” above.In addition we will give you the index of the past issue invluding direct access using a hyperlink. By usingthis link IEEE ITSS members have full access to the papers. Non-members can browse the abstracts. Wehope you will appreciate this new feature.
Vol.7, No.2, June 2006
Table of Content
• POP-TRAFFIC: A Novel Fuzzy Neural Approach to Road Traffic Analysis and Predic-tionChai Quek, Michel Pasquier and Bernard LimPage(s): 133-146Digital Object Identifier 10.1109/TITS.2006.874712Abstract — Full Text: PDF (656 KB)Rights and Permissions
• An Enhanced Soft Handoff Scheme for real-time streaming services in Intelligent Trans-portation Systems based on CDMA, by Young-uk Chung and Dong-Ho ChoPage(s): 147-155Digital Object Identifier 10.1109/TITS.2006.874715Abstract — Full Text: PDF (760 KB)Rights and Permissions
• Power Matching Approach for GPS Coverage Extension, by Samer S. Saab and Zaher M.KassasPage(s): 156- 166Digital Object Identifier 10.1109/TITS.2006.874720Abstract — Full Text: PDF (656 KB)Rights and Permissions
• Calibrating a Real-Time Traffic Accident Prediction Model Using Archived Weather andITS Traffic Data, by Mohamed Abdel-Aty and Rajashekar PemmanaboinaPage(s): 167- 174Digital Object Identifier 10.1109/TITS.2006.874710Abstract — Full Text: PDF (656 KB)Rights and Permissions
• An Automatic Traffic Surveillance System for Vehicle Tracking and Classification, by Jun-Wei Hsieh, Shih-Hao Yu, Wen-Fong Hu and Yung-Sheng ChenPage(s): 175- 187Digital Object Identifier 10.1109/TITS.2006.874722Abstract — Full Text: PDF (656 KB)Rights and Permissions
18

• Detection and Classification of Highway Lanes Using Vehicle Motion Trajectories, by An-drew Naftel, Jos P. Melo, Alexandre Jos Malheiro Bernardino and Jos Santos-VictorPage(s): 188- 200Digital Object Identifier 10.1109/TITS.2006.874706Abstract — Full Text: PDF (656 KB)Rights and Permissions
• Real-Time Disparity Contrast Combination for Onboard Estimation of the Visibility Dis-tance, by Nicolas Hautiere, Raphael Labayrade and Didier AubertPage(s): 201- 212Digital Object Identifier 10.1109/TITS.2006.874682Abstract — Full Text: PDF (656 KB)Rights and Permissions
• ACC+Stop&Go Maneuvers with Throttle and Brake Fuzzy Control, by Jose E. Naranjo,Carlos Gonzalez, Ricardo Garciıa and Teresa de PedroPage(s): 213- 225Digital Object Identifier 10.1109/TITS.2006.874723Abstract — Full Text: PDF (656 KB)Rights and Permissions
• Time to Line Crossing for Lane Departure Avoidance: a Theoretical Study and an Ex-perimental Setting, by Said Mammar, Sebastien Glaser and Mariana NettoPage(s): 226- 241Digital Object Identifier 10.1109/TITS.2006.874707Abstract — Full Text: PDF (656 KB)Rights and Permissions
• Automatic Commercial Aircraft Collision Avoidance in Free Flight: The Three Dimen-sional Problem, by Manolis A. Christodoulou and Sifis G. KodaxakisPage(s): 242- 249Digital Object Identifier 10.1109/TITS.2006.874684Abstract — Full Text: PDF (656 KB)Rights and Permissions
• A Reliability Framework for Traffic Signal Control, by Hong K. LOPage(s): 250- 260Digital Object Identifier 10.1109/TITS.2006.874680Abstract — Full Text: PDF (656 KB)Rights and Permissions
19

Vol.7, No.3, September 2006
• Neural Networks for Real-Time Traffic Signal Control, by Dipti Srinivasan, Min Chee Choyand Ruey Long Cheu
Abstract: Real-time traffic signal control is an integral part of the Urban Traffic Control System(UTCS) and providing effective real-time traffic signal control for a large complex traffic networkis an extremely challenging distributed control problem. This paper adopts the multi-agent sys-tem approach to develop distributed, unsupervised traffic responsive signal control models, whereeach agent in the system is a local traffic signal controller for one intersection in the traffic net-work. The first multi-agent system is developed using hybrid computational intelligent techniques.Each agent employs a multi-stage online learning process to update and adapt its knowledge baseand decision-making mechanism. The second multi-agent system is developed by integrating theSimultaneous Perturbation Stochastic Approximation (SPSA) theorem in fuzzy neural networks(SPSA-NN). The problem of real-time traffic signal control is especially challenging if the agentsare used for an infinite horizon problem where online learning has to take place continuously oncethe agent-based traffic signal controllers are implemented into the traffic network. A comprehen-sive simulation model of a section of the Central Business District (CBD) of Singapore has beendeveloped using PARAMICS microscopic simulation program. Simulation results show that thehybrid multi-agent system provides significant improvement in traffic conditions when evaluatedagainst an existing traffic signal control algorithm as well as the SPSA-NN based multi-agentsystem as the complexity of the simulation scenario increases. Using the hybrid NN-based multi-agent system, the mean delay of each vehicle was reduced by 78% and the mean stoppage time by85% compared to the existing traffic signal control algorithm. The promising results demonstratethe efficacy of the hybrid NN-based multi-agent system in solving large scale traffic signal controlproblem in a distributed manner.
Page(s): 261- 272Digital Object Identifier 10.1109/TITS.2006.874716AbstractPlus — Full Text: PDF (760 KB)Rights and Permissions
• Advance Path Measurement for Automotive Radar Applications, by Peter Hall, Shiu HangTsang, Edward G. Hoare and Nigel J. Clarke
Abstract: Millimetre-wave automotive radars are currently being used for adaptive cruise con-trol (ACC). To extend their application to collision warning (CW) and collision avoidance (CA)increased capability is required in the assessment of hazards and the environment. A signalprocessing scheme, called the Advance Path Measurement (APM) algorithm, which extracts thetrajectory of the road path ahead of a radar-equipped vehicle, is presented as a step towardsincreasing current capabilities. A millimetre-wave radar equipped vehicle with data logging fa-cilities was used to record real-time millimetre-wave radar data. The recorded data was used asthe primary input to the algorithm discussed in this paper. The data was signal processed togenerate an image, which was analysed using image processing techniques to extract road edgefeatures, using thresholding, peak detection, and Hough transformation. The performance of theAPM algorithm has been examined by comparing the radar-derived radius of curvature with adigital map database, GPS position, and yaw rate data. The radar-derived APM algorithm resultsprovide an encouraging basis for continuing development.
Page(s): 273- 281Digital Object Identifier 10.1109/TITS.2006.880614Abstractplus — Full Text: PDF (840 KB)Rights and Permissions
20

• Local Difference Probability (LDP)-Based Environment Adaptive Algorithm for Un-manned Ground Vehicle, by Pangyu Jeong and Nedevschi Sergiu
Abstract: This paper presents a new vision sensor based road following method for unmannedvehicles. Usually, the performance obtained with such methods is limited by several factors likeimage quality according to camera types (CCD/CMOS), mounted camera position, stereo-/single-vision sensors, structured/unstructured environment, and image noise (illumination and shadow).Existing road following algorithms for unmanned vehicles perform well, given a certain numberof satisfied constraints, so there is a lack of flexibility in their use in real world situations. Thecurrently proposed LDP (Local Difference Probability) based method overcomes most of theseconstraints assuring flexibility in real world environments.
Page(s): 282- 292Digital Object Identifier 10.1109/TITS.2006.880636AbstractPlus — Full Text: PDF (1384 KB)Rights and Permissions
• Vehicle Surround Capture: Survey of Techniques and a Novel Omni-Video-Based Ap-proach for Dynamic Panoramic Surround Maps, by Tarak Gandhi and Mohan M. Trivedi
Abstract: Awareness of what surrounds a vehicle directly affects the safe driving and maneuver-ing of an automobile. This paper focuses on the capture of vehicle surroundings using video inputs.Surround information or maps can help in studies of driver behavior as well as provide criticalinput in the development of effective driver assistance systems. A survey of literature related tosurround analysis is presented, emphasizing on detecting objects such as vehicles, pedestrians, andother obstacles. Omni cameras which give a panoramic view of the surroundings can be usefulfor visualizing and analyzing the nearby surroundings of the vehicle. The concept of DynamicPanoramic Surround (DPS) map that shows the nearby surroundings of the vehicle, and detectsthe objects of importance on the road is introduced. A novel approach for synthesizing the DPSusing stereo and motion analysis of video images from a pair of omni cameras on the vehicle isdeveloped. Successful generation of the DPS in experimental runs on an instrumented vehicletestbed is demonstrated. These experiments prove the basic feasibility and show promise of omnicamera based DPS capture algorithm to provide useful semantic descriptors of the state of movingvehicles and obstacles in the vicinity of a vehicle.
Page(s): 293- 308Digital Object Identifier 10.1109/TITS.2006.880635AbstractPlus — Full Text: PDF (1536 KB)Rights and Permissions
• Building Road-Sign Classifiers using a Trainable Similarity Measure, by Pavel Paclık, JanaNovovicova and Robert P.W. Duin
Abstract: Deriving an informative data representation is an important prerequisite when de-signing road sign classifiers. A frequently used strategy for road sign classification is based onthe normalized cross-correlation similarity to class prototypes followed by the nearest neighborclassifier. Because of the global nature of the cross-correlation similarity, this method suffers frompresence of uninformative pixels (caused e.g. by occlusions), and is computationally demanding.In this paper, a novel concept of a trainable similarity measure is introduced which alleviates theseshortcomings. The similarity is based on individual matches in a set of local image regions. Theset of regions, relevant for a particular similarity assessment, is refined by the training process.It is illustrated on a set of experiments with road sign classification problems that the trainablesimilarity yields high-performance data representations and classifiers. Apart from a multi-classclassification accuracy, also non-sign rejection capability, and computational demands in executionare discussed. It appears that the trainable similarity representation alleviates some difficultiesof other algorithms, currently used in road sign classification.
21

Page(s): 309- 321Digital Object Identifier 10.1109/TITS.2006.880627AbstractPlus — Full Text: PDF (912 KB)Rights and Permissions
• Characterization of Driving Behaviors Based on Field Observation of Intersection Left-Turn Across-Path Scenarios, by Chingyao Chan
Abstract: There have been significant research and developments in recent years for intersec-tion safety solutions that are intended to alert drivers of hazardous situations by utilizing sensing,computing, and communication technologies. Since the effectiveness of intersection safety systemsdepends strongly on driver perception and acceptance of the provided warning signal, the under-standing of driver actions under the targeted scenario is a central research topic. One significantsafety concern at intersections is the left-turn crossing-path scenarios, where a left-turning vehicleis confronted by oncoming traffic. This paper describes the analysis and synthesis of real-worlddata for such scenarios observed in field observations. Specifically, traffic interactions in left-turnacross-path situations are evaluated to compare data from various intersections with different op-eration and traffic attributes. The analyzed data were characterized to gain insight into time gapacceptance exhibited by a population of drivers. The knowledge of driving behaviors can providethe guidelines for future investigation as well as a knowledge basis for the selection of warningcriteria to allow timely alerts to drivers in the intended safety applications.
Page(s): 322- 331Digital Object Identifier 10.1109/TITS.2006.880638AbstractPlus — Full Text: PDF (1800 KB)Rights and Permissions
• Examination of Multiple Mode/Route-Choice Paradigms Under ATIS, by Mohamed Abdel-Aty and M. Fathy Abdalla
Abstract: The objective of this paper is to collect and analyze data that can be used to modelmode and different route choice paradigms using same subjects and same experiment. In thispaper we estimated five models to address drivers’ diversion, compliance and route choice. Inaddition, the effect of ATIS on mode choice is also considered. A travel simulator was used asa dynamic data collection tool. The simulator uses realistic network, two modes of travel, realhistorical volumes, and different weather conditions. It provides five different levels of trafficinformation/advice, one at a time, and collects dynamic mode choices and pre-trip (long-term)and en-route (short-term) route choices. The Binomial and Multinomial Generalized ExtremeEquations (BGEE and MGEE) were used to account for correlation between repeated choicesmade by the same subject. In addition, MGEE accounts for correlation between alternativesin multidimensional route choice models. The modeling results showed that travel time andfamiliarity with the device that provides the information had significant effects in the first fourmodels. It is shown that developing in-vehicle information devices may lead to less transit usagein some cases; this indicates a potential drawback of this technology. Expressway users are shownas most travel-time savers who would divert if they are guided to less-travel-time alternative.Number of traffic signals on the normal and advised routes affects diversion from the normal routeand compliance with pre-trip advised route. The paper underlines the importance of modelingcorrelation, if exists, in mode/route choice data. Index Terms* Mode/route choices, pre-trip,en-route, diversion, compliance, correlation.
Page(s): 332- 348Digital Object Identifier 10.1109/TITS.2006.880634AbstractPlus — Full Text: PDF (1968 KB)Rights and Permissions
• Modeling and Identification of Passenger Car Dynamics Using Robotics Formalism, byGentiane Venture, Pierre-Jean Ripert, Wisama Khalil, Maxime Gautier and Philippe Bodson
22

Abstract: This paper deals with the problem of dynamic modelling and identification of pas-senger cars. It presents a new method which is based on robotics techniques for modelling anddescription of tree structured multi-body systems. This method enables us to systematically ob-tain the dynamic identification model, which is linear with respect to the dynamic parameters.The estimation of the parameters is carried out using a weighted least squares method. Theidentification is tested using vehicle dynamics simulation software, used by the car manufacturerPSA Peugeot-Citron, in order to define a set of trajectories with good excitation properties andto determine the number of degrees of freedom of the model. The method has then been usedto estimate the dynamic parameters of an experimental Peugeot 406, which is equipped withdifferent position, velocity and force sensors.
Page(s): 349- 359Digital Object Identifier 10.1109/TITS.2006.880620AbstractPlus — Full Text: PDF (584 KB)Rights and Permissions
• A Diagnostic System For Air Brakes in Commercial Vehicles, by Swaroop Darbha, ShankarC. Subramanian and K. R. Rajagopal
Abstract: The safe operation of vehicles on roads depends amongst other things, on a properlyfunctioning brake system. Air brake systems are widely used in commercial vehicles such astrucks, tractor-trailers and buses. In these brake systems, compressed air is used as the energytransmitting medium to actuate the foundation brakes mounted on the axles. In this article, wepresent a model-based diagnostic system for air brakes. This diagnostic system is based on anon-linear model for predicting the pressure transients in the brake chamber that correlates thebrake chamber pressure to the treadle valve (brake application valve) plunger displacement andthe pressure of the air supplied to the brake system. Leaks and ”out-of-adjustment” of push rodsare two prominent defects that affect the performance of the air brake system. We will presentdiagnostic schemes that will monitor the brake system for these defects and corroborate themwith experimental data obtained from our brake testing facility.
Page(s): 360- 376Digital Object Identifier 10.1109/TITS.2006.880645AbstractPlus — Full Text: PDF (776 KB)Rights and Permissions
• A License Plate-Recognition Algorithm for Intelligent Transportation System Applica-tions, by Christos Anagnostopoulos, Ioannis E. Anagnostopoulos, Vassili Loumos and EleftheriosKayafas
Abstract: In this paper, a new algorithm for vehicle license plate identification is proposed, on thebasis of a novel adaptive image segmentation technique (Sliding Concentric Windows-SCW) andconnected component analysis in conjunction with a character recognition Neural Network. Thealgorithm was tested with 1334 natural scene gray level vehicle images of different backgrounds andambient illumination. The camera focused in the plate, while the angle of view and the distancefrom the vehicle varied according to the experimental setup. The license plates properly segmentedwere 1287 over 1334 input images (96.5%). The Optical Character Recognition (OCR) system is atwo layer Probabilistic Neural Network (PNN) with topology 108-180-36, whose performance forentire plate recognition reached 89.1%. The PNN is trained to identify alphanumeric charactersfrom car license plates based on data obtained from algorithmic image processing. Combiningthe above two rates, the overall rate of success for our LPR algorithm is 86.0%. A review in therelated literature presented in this paper, reveals that better performance (90% up to 95%) hasbeen reported, when limitations in distance, angle of view, illumination conditions are set andbackground complexity is low.Page(s): 377- 392Digital Object Identifier 10.1109/TITS.2006.880641AbstractPlus — Full Text: PDF (1104 KB)Rights and Permissions
23

Conference Reports
IEEE/ASME MESA06 in Beijing, China
By Harry H. Cheng, University of California, Davis
The 2006 IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications (MESA06) was held on August 13-16 in Beijing, China. MESA06 was sponsored by the IEEE Intelligent Transportation Systems Society, ASME Division of Computer and Information in Engineering, and ASME Division of Design Engineering. It was also technically co-sponsored by the Chinese Association for Automation, Chinese Mechanical Engineering Society, and National Natural Science Foundation of China. Professor Fei-Yue Wang was the General Chair and Professor Harry H. Cheng was the Program Chair. There were 152 paper submissions for MESA06. The Program Committee selected 87 papers for presentation at both regular technical sessions and poster sessions. In addition, there are five keynote and plenary speeches, and three panel sessions. More than 100 researchers and practitioners attended the conference. MESA was the first and so far the only conference that aims to bring mechatronic and embedded system designs and applications together. It employs a unique collaboration model between IEEE and ASME. Currently, MESA is organized by ASME and IEEE alternatively each year. Last September, MESA05 was held in Long Beach, California, organized mainly by ASME as one of conferences in the International Design Engineering Technical Conferences (IDETC). This year, MESA06 was mainly organized by IEEE for the first time as an independent conference. Next year, MESA07 will be held on September 4-7, 2007 in Las Vegas, Nevada and mainly organized by ASME within the IDETC again. MESA provides a unique opportunity for researchers and professionals from different fields to meet and exchange ideas and experiences on research and development in mechatronic and embedded systems.
24

Technical Contributions
by Brian Park
Byungkyu ”Brian” Park, University of Virginia, USA.
This technical contributions section introduces state-of-the-art research and/or state-of-the-practice appli-cations in the area of intelligent transportation systems (ITS).
We are especially interested in receiving contributions from non-ITSS members and promoting interactionsamong sister societies within IEEE and other organizations advocating the ITS. Original contributions, ex-cerpts from IEEE Journals (with permission) and reprints from recent IEEE conferences (except those hostedby ITSS) can be submitted for consideration for publication in this section.
Please send your contributions to me at [email protected].
25

A Portable Real-Time Lane Departure WarningSystem based on Embedded Calculating Technique
Pei-Yung Hsiao and Chun-Wei Yeh// Department of Electronic Engineering//Chang Gung University, Tao-Yuan, Taiwan, ROC
I. Introduction
Nowadays, traffic accidents have become one ofthe most serious global problems. Most accidents oc-cur due to drivers’ negligence. For example, the U.S.Department of Transportation [1] has reported that42,643 people killed on U.S. nation’s highways in 2003and over 25,000 died due to their vehicle left their lanechannel. In some cases, the vehicle crossed the center-line and was involved in a head-on crash or oppositedirection sideswipe. In others, the vehicle encroachedonto the shoulder and beyond to rollover or impactedone or more natural or man-made objects, such asutility poles, bridge walls, embankments, guardrails,parked vehicles, and trees. Thus, to look for waysof how to develop a driver assistance system to im-prove driving safety has become a popular researchtopic recently. While most of the research works arestill implemented on PC platforms, their applicabil-ity would decline. Besides, some of the vehicle makershave started adopting some driver assistance systemsin their concept cars [2]. But in order to enhancedriving safety, we should offer these systems not onlyto new vehicles but also for all the vehicles in theworld. Thus, to enhance portability and flexibilityof the Lane departure warning systems, we wantedto develop a portable real-time lane departure warn-ing system should be cheap, easy to install, and ableto be combined with other vehicular consumer de-vices, such as digital cameras, cell phones, and PDAs.Figure 1 shows the concept drawing of the proposedportable device.
Most of the research studies on driver assistancesystems focus on the technology of lane detectionsince it is basic and has a lot of applications in areassuch as autonomous vehicles and the lane departurewarning systems. As a consequence, the first stepin developing a lane departure warning system is tohave a robust lane detection method wherein lanedetection is its most important technology and ma-jor component. In previous research studies, Yimand Oh [3] proposed a three-feature based automaticlane detection algorithm (TFALDA). This algorithmis based on similarity matches within a three di-mensional (3-D) space spanned by the three laneboundary features-starting position, direction (ororientation), and the gray-level intensity features.
Jung and Kelber [4] proposed an algorithm basedon the Linear-Parabolic model whereby the image isseparated into two vision fields: (1) near, which usesa linear function, and (2) far, which uses a parabolicfunction. Then it makes use of the corresponding ori-entations to the lane departure warning method afterdetermining the left and the right linear functions ofthe lane boundaries. However, their lane departurewarning method is not very accurate. They use sin-gle frame to detect lane marker and may arise falsealarm more frequently. Therefore, they have triedto improve their lane departure warning algorithm in[5], by using lateral offset to refine the detection algo-rithm. Huang et al [6] proposed a peak-finding basedalgorithm which uses the brightness and slendernessof the lane mark to find the peak points, and the lin-ear regression method to designate the line segments.Afterwards, they make use of the proximity of thelane marks to combine these line segments.
Figure 1: The new concept of a portable real-timelane departure warning systems.
In the present paper, we developed our systemby combining the modified peak-finding algorithm [6]and the proposed lane departure warning algorithmonto the embedded system platform with ARM basedcomputing unit.
II. Architecture of Lane Departure Warning System
To implement the lane departure warning func-tions on an embedded system, we have to make a
26

specific hardware design. Our system hardware ar-chitecture of the portable real-time lane departurewarning system is shown in Fig. 2.
Figure 2: System hardware architecture
A. Core Architecture
The system architecture core consists of twomodules. They are the embedded processor for com-putation and the reconfigurable FPGA module forcapturing the input road image to the processor andforwarding the input or outcome image to the LCDmodule.
1. Embedded Processor: Since the ARM basedembedded processors are characterized by theirlow-cost, low-power consumption and high per-formance, they are widely used in embeddedsystems. In addition, the embedded memorycontroller provides an external memory businterface supporting various memory chips indifferent operating modes. Thus, we success-fully adopted the ARM CPU as our embeddedprocessor.
2. Reconfigurable FPGA Module: Several previ-ous research studies suggest that adding a fieldprogrammable gate array device (FPGA) couldenhance the testability and the extendibilityof an embedded system [7-8]. We then putan FPGA into our system and try to connectthe memory bus with the image sensor andthe LCD module through the FPGA design.Therefore, in order to speedup the transmis-sion throughput for a real-time requirement,we developed a Data Transfer Channel (DTC)scheme as shown in Fig. 3. This make theinterconnect processing inside the FPGA suc-cessfully use the System Memory Bus (SMB)instead of the General Purpose Input/Output
(GPIO). By employing the memory controllerand the AMBA High-performance Bus (AHB)to communicate with ARM core, we obtain atwo times speedup than by employing the GPIOand the Advanced Peripheral Bus (APB). Sev-eral previous researches implemented part oftheir algorithm into the FPGA to enhance thecalculating speed. For instance, J. Kazubiak etal [9] presented an alternative embedded plat-form for vehicle and lane detection. In theirdetection algorithms, they need high calculat-ing capacity. The generation of their proposeddepth-map should be completely implementedon the FPGA; otherwise, it can not fit with therequirement of the real-time processing. How-ever, our real-time system can run the wholecalculation of our algorithms in the ARM CPU.The circuits designed in the FPGA are devel-oped for high speed communication and somefundamental computational modules, such asthinning, Gaussian smoothing, and edge detec-tion for image preprocessing to provide highextendibility of our embedded platform usedfor various applications, not limited to automo-bile applications.
Figure 3: The Data Transfer Channel scheme forhigh speed communication among the SMB, theCMOS Image Sensor Module, and the LCD Mod-ule
B. Peripherals
Beside the core architecture, we also constructsome peripherals to complete the architecturalscheme of the embedded platform.
1. Input/Output module: The input devices of aportable Lane Departure Warning System arethe image sensor that extracts the images, andthe keypad that controls the signals. The mainoutput devices are the LCD Module which dis-
27

plays the results after image processing, andthe buzzer to produce the warning sounds.
2. Storage Module: In our prototype, we used the2MB Flash ROM to store the machine codes ofthe proposed programs, and the 16MB SDRAMas the main memory of our embedded system.
3. Power supply module: Power consumption hasa big impact on the system cost and reliabil-ity. We utilized low power consumption devicesand a high efficiency regulator to build a betterpower supply module.
C. System Operating Flow
Figure 4: System operating flow
Figure 4 shows the operating flow of our system.The road images are grabbed by the CMOS imagesensor. Through the DCT inside the FPGA, theimage data are preprocessed and transferred to theARM processor. Inside the ARM CPU, all the com-putations are fulfilled by the developed embeddedsoftware. At final, the results are displayed on theLCD module and the alert signals happen immedi-ately, if the lane departure is detected.
III. Embedded Software Design
In this section, we divide our algorithm into twoparts, such as lane detection and lane departure de-tection, and discuss them as follows.
A. Lane DetectionThe proposed algorithm detects the lane boundariescomprising five major parts:
1. Image pre-processing: We used a Gaussian fil-ter for smoothing the input image and filtering
out the black and white noises.
2. Peak and Edge Finding: To find out the peakpoints as shown in Fig. 5, we have to define sixvariables: Ps, Pe, Pp, Vs, Ve, and Vp, whereStar Position (Ps) is the position of first climb-ing up point, End Position (Pe) is the posi-tion of last climbing down point, Peak Position(Pp) is the position of first climbing down point,Start Value (Vs) is the gray value of Start Po-sition, End Value (Ve) is the gray value of EndPosition, and Peak Value (Vp) is the gray valueof Peak Position.
Figure 5: The sample of the hill definition
Figure 6: The profile of a stained lane mark
If the lane mark is thick and stained, the peakpoint is unable to be detected, even after apply-ing the smoothing operation. Figure 6 showsa sample of the stained lane mark. Obviously,the stained lane mark has two hills, and thesehills can not been eliminated by the normalsmoothing operation. In this situation, wehave to define a tolerance region to help us tofind out the peak points in a stained lane mark.If the difference between two points is higher
28

than the threshold value, Th, the lower point isdefined as Ps and the higher point as Pps. Wethen use the gray level value of Pps to build thetolerance region as within the range between(Vps+(Vps-Vs) /4 and ( Vps-(Vps-Vs) /4). Incase there is another gap between two pointsis higher than Th, then we define the higherpoint as Ppe and the lower point as Pe. Conse-quently, the Pp is set to be (Ppe+Pps)/2, andVp to be (Vps+Vpe)/2. Thus, if the width be-tween Ps and Pe is smaller than Tw, we markand save sown Vp and Vs. The conditionalprocedure can be denoted as followed.
If (V ps − V s) > Th and (V pe − V e) >Th and (Ps − Pe) < TwThen V p = (V ps + V pe)/2 and Pp = (Pps +Ppe)/2
After finding peak points in the image, we thengroup the peak points, which may locate atthe same lane boundaries. The way we usedto group peak points is to adopt a 3x9 mask,which is shown in Fig. 7. We make every peakpoint to be the central point of a 3x9 mask,and let other points in the mask to be the samegroup like as the central point, and then repeatthe same operation iteratively.
Figure 7: The 3X9 mask.
3. Edge Connection: The selected peak points arecollected and separated as many as line segmentby employing the linear regression method.Each produced line segment is defined as be-low:
L(PL(XL, YL), PU (XU , YU ), b0, b1),wherePL : Top Point of Line-SegmentPU : Bottom Point of Line-Segmentb0 : Intercept of Line-Segmentb1 : Slope of Line-Segment
The b0 and b1 are generated by (1) and (2):
b0 = X + b1Y (1)
b1 =n
n∑i=1
Xi · Y i −n∑
i=1
Xin∑
i=1
Y i
nn∑
i=1
Y i2 − (n∑
i=1
Y i)2(2)
Figure 8: Line segment combination.
4. Line-Segment Combination: After producingthe line segments, we apply the proximity fea-ture to combine the line segments so as to formthe lane boundaries. As shown in Fig. 8, theline segment A and the line segment B are twoclosed line segments. If the distance betweenthe top point of the line segment B and theextended straight line of the line segment A isless than a threshold value, Tc, we will com-bine these two line segments by connect thetop point of the upper line segment line seg-ment and the bottom point of the lower one.The developed algorithm is to combine as morepairs of line segments as possible. The resultsare buffered for the use of the next procedure.
5. Lane Boundary Selection: The most possiblecandidates of the lane boundaries are selectedout in this process. Firstly, the longest com-bined line segment is chosen and defined asthe master lane boundary. Then the slave laneboundary is chosen according to the criteriastating that it has an opposite slope value incomparing to the master lane boundary.
While the vehicle changing its lane channel,our algorithm may detect three lane bound-aries. In this situation, the lane departurealgorithm should be invoked to decide when togenerate the warning signal.
B. Lane Departure Detection
29

Figure 9: Results for lane detection step by step with Tw=20, Th=10, and Tc=6, in a 128 x128 roadimage. (a) Original image (b) Smoothed image (c) Peak points (d) Edge points (e) Line segments (f) Lanecandidates (g) Selected lane boundaries.
After the lane detection processing as shown inFig. 9, we obtain two or three lane boundaries,and we need to use this information for lanedeparture detection.
In our algorithm, we have two ways to make acorrect decision for lane departure. The alarmtypes are then classified into two warning lev-els. For the first level warning, if three laneboundaries are selected by the aforementionedlane boundary selection, we have to evaluateand chose the one that is much more precipi-tous than the others. If its position is locatedbetween the other two boundaries, the lanedeparture first level warning will be alerted.Moreover, when the vehicle leaves away its lanechannel, as shown in Fig 10, one of the de-tected lane boundaries should appear closely inthe middle position of the whole image. Ac-cordingly, we propose an additional constraintto enhance the algorithm to be more accurateand to reduce false alarm. Below is the pro-posed constraint:
If b0 of the master lane located in the warningregion else if b0 of the slave lane located in thewarning region then the fact of lane departureis detected.
Figure 10: The warning region.
The first level warning is triggered depend-ing on one single image picture. Based onour observation, most cases of the lane depar-ture should be detected by using two or morethan two continuous frames of the road images.Thus, we propose the second level of warningbased on ten continuous frames.
For introducing the second level warning, wedefine a time related function l(t), as shown in(3), which describes the sum of lane boundaryintercept divided by the time interval neededfor ten continuous image frames(about 0.5
30

second),∆t .
l(t) =
10∑i=1
(|Mn(b0)| + |Sn(b0)|
∆t(3)
where M(b0) stands for the intercept of themaster lane boundary, and S(b0) for the slavelane boundary.
The variable ζ shown in (4) presents the differ-ence between two time related functions, l1(t)and l2(t). If ζ is larger than a threshold valueof T1 ,ζ > T1, then the system will alert a sec-ond level warning. In this situation, the vehicleis under changing to another lane channel in avery quick way.
ζ = l1(t) − l2(t) (4)
IV. Experimental Results
We have realized our design of the embeddedlane departure warning system on a customboard as shown in Fig 11. The processor isan ARM7 32-bit RISC CPU with 66 MHz andthe field programmable device is an FPGA fromXilinx, which has 138,000 logic cells. The powerconsumption is about 1W, and the prototypesystem can process 128x128 image size in 22fps.
Figure 11: The prototype system.
From our experiments, the first level warninghas nearly no false alarm. On the other respect,the second level warning will alert based on theζ is larger than a threshold value. We foundthat the ζ is between +0.2 and -0.2, mostlywhenever the vehicle is located at about thecentral position of the lane channel. Hence
if the vehicle is undergoing a quick departure,then the ζ should immediately rise to be largerthan +0.2. Thus we choose Tl = 0.2 as thethreshold value. From the results shown in Fig.12, the second level warning did not happen inCase I, in which the vehicle’s speed is about 50Km/hr. While in Case II, the vehicle’s speedis mostly over 80 Km/hr and the second levelwarning alerted when i = 19-21, even that therewas no lane boundary in the warning region atthat time.
Figure 12: ζ and second level warning
V. Conclusion
This study presents a handheld real-time lanedeparture warning system, which can easily bemounted on real vehicle and dramatically im-proves safety. Using embedded technologies todevelop a portable lane departure warning sys-tem could bring about certain advantages, suchas compact size, low-power and low-cost. Theexternal efforts can also be made to developa portable lane departure warning systems invarious popular consumer devices, such as digi-tal cameras, cell phones, and PDAs. Thus, thepresented concept and the developed prototypecan be constructed not only as an independentportable device, but also as a compound prod-uct by combining with other consumer devicesto enhance their added values.
Acknowledgment
This work was supported in part by Na-tional Science Council, Taiwan, ROC. un-der Grant NSC93-2215-E-182-005 and NSC94-2215-E-182-010.
31

References
[1] U.S. Department of Transportation:http://www.dot.gov/
[2] Audi allroad Concept: Driver AssistanceSystemshttp://www.audiworld.com/news/05/naias/aaqc/content5.shtml
[3] Young Uk Yim and Se-Young Oh,”Three-Feature Based Automatic Lane DetectionAlgorithm (TFALDA) for AutonomousDriving,” IEEE Trans. Intelligent Trans-portation Systems, Vol. 4, No. 4, Dec. 2003.
[4] Claudio Rosito Jung and ChristianRoberto Kelber,”A Lane Departure Warn-ing System based on a Linear-ParabolicLane Model,”IEEE Intelligent VehiclesSymposium, pp.891 - 895, Jun 2004.
[5] Claudio Rosito Jung and ChristianRoberto Kelber,”A Lane Departure Warn-ing System Using Lateral Offset withUncalibrated Camera,” IEEE Conferenceon Intelligent Transportation Systems,pp348-353, Sep. 2005.
[6] Shih-Shinh Huang, Chung-Jen Chen, Pei-Yung Hsiao, and Li-Chen Fu, ”On-Board Vision System for Lane Recognitionand Front-Vehicle Detection to EnhanceDriver’s Awareness,” IEEE InternationalConference On Robotics And Automation,Vol. 3, pp. 2456-2461, Apr. 26-May 1, 2004.
[7] Rui Wang and Shiyuan Yang, ”The Designof a Rapid Prototype Platform for ARMBased Embedded System,” IEEE Trans.Consumer Electronics , Vol. 50, No. 2,May. 2004.
[8] S. Cardelli, M. Chiodo, P. Giusto, A. Ju-recska, L. Lavagno, A. Sangiovanni Vin-centelli, ”Rapid-Prototyping of EmbeddedSystems via Reprogrammable Devices,”IEEE International Workshop on RapidSystem Prototyping, pp133 - 138, Jun.1996.
[9] J. Kaszubiak, M. Tornow, R.W. Kuhn, B.Michaelis, and C. Knoeppel, ”Real-timevehicle and lane detection with embeddedhardware,”IEEE Intelligent Vehicles Sym-posium, pp.619 - 624, Jun 2005.
32

Research Programs
Research Reviewby Angelos Amditis
Angelos Amditis, Institute Of Communication and Computer Systems, Greece
PrefaceEfficiency, comfort and safety are the key parameters that are being addressed the last decade through dif-ferent research projects.
Significant research effort has been spent to improve the road network or to develop intelligent cars that warnthe driver or intervene in unwanted situation. The latter was briefly presented in the previous newsletter ofIEEE.
In this short overview, I will present research projects and technologies that couple the road infrastructureand the vehicles, making the whole environment smarter and more efficient, namely the cooperative systems.
If you are interested in publishing material to the research section please send a short one page text withfocus on the overview of research results and activities world wide.
Please, send you contributions for future newsletters to [email protected].
33

Research on Cooperative Systems - Overview of the on-going EUactivities
IntroductionA few words on the background and some statistics: The estimated 300 million drivers in Europe todaywould all appreciate more efficient road networks. Congestion costs the EU 50 billion every year, or 0.5% ofthe GDP. As the number of cars and the distance traveled continues to increase, this figure is estimated torise to 1% by 2010. Over the last 30 years, the number of cars per 1000 persons has doubled and the distancetraveled by road vehicles has tripled. As a result, 10% of Europe’s roads are congested daily. ITS, coupledwith appropriate investments in infrastructure, can help increase the efficiency of our transport networks.Improved systems that collect and deliver real-time traffic information to urban traffic control centres willhelp infrastructure operators manage the traffic more efficiently, potentially reducing standstill traffic andcongestion by up to 40% according to recent estimates.
On the other hand more than 40,000 people die and 1.7 million are injured annually on Europe’s roads.Further progress in reducing these numbers cannot be achieved by merely ensuring the best possible protec-tion when an accident occurs. Greater attention must be devoted to developing and deploying systems thatintervene before the accident happens. With at least 93% of accidents caused by human error, the case forincreased driver assistance is clear. Whether due to poor perception of danger or mistaken interpretationsof driving conditions, ill-advised decision making causes the majority of accident-producing situations.
There is a batch of three on-going EU co-funded Integrated Projects that are clustered under the um-brella of cooperative systems contributing to the goals for smarter and efficient driving environments.
The CVIS project aims to design, develop and test the technologies needed to allow cars to communi-cate and network directly with the roadside infrastructure. With CVIS, drivers can influence the trafficcontrol system directly and get individual guidance with the quickest route to their destination. Speed lim-its and other road sign information, as well as warnings of approaching emergency vehicles and similar urgentmessages will be sent wirelessly to the vehicle and displayed to the driver. To validate the project’s results,CVIS technologies and applications will be tested at one or more test sites in seven European countries:France, Germany, Italy, Netherlands/Belgium, Sweden and the UK. The objectives of CVIS are to:
• Create a standardized in-vehicle and roadside module capable of connecting continuously and seam-lessly using a wide range of communication media, including mobile cellular and wireless local areanetworks, short-range microwave (DSRC) or infrared.
• Develop techniques for enhanced vehicle positioning and improved local dynamic maps, using satellitenavigation and the latest methods for location referencing.
• Define and test new systems for cooperative traffic and network monitoring for use both in vehicle androadside equipment, to detect incidents instantly and anywhere.
• Develop architecture, software and hardware prototypes for a number of example cooperative applica-tions and services for urban and interurban traffic management, as well as freight and fleet management.
• Create guidelines and tools addressing key non-technical challenges to deployment such as user accep-tance, data privacy and security, system openness and interoperability, risk and liability, public policyneeds, cost/benefit and business models, and roll-out plans for implementation.
The SAFESPOT project aims to develop and test the technology that will enable such cooperation, de-vising a ”Safety Margin Assistant” that will increase the amount of information available to drivers. Bycombining quality data from roadside sensors and data sent directly from vehicles in the vicinity, advance
34

knowledge can be gained about potential safety risks, such as an icy patch, fog bank, obstacle or accident onthe road ahead (but out of sight). The communication of warnings and advice to approaching vehicles (bothdirectly to onboard units and via roadside signals) will provide extra reaction time that may help prevent anaccident. One of the main aims of SAFESPOT is to develop a ”Safety Margin Assistant” which will extend”in space and time” the safety information available to drivers by:
• using both the infrastructure and vehicles as sources (and destinations) of safety-related information,and definition of an open, flexible and modular communications architecture;
• developing the key enabling technologies: accurate relative localization, ad-hoc dynamic networking,dynamic local traffic maps;
• developing a new generation of infrastructure-based sensing techniques; testing scenario-based appli-cations to evaluate the impacts and end-user acceptability;
• defining the practical implementation of such systems, especially in the interim period when not allvehicles will be equipped;
• evaluating the liability aspects, regulations and standardization issues which can affect implementation:involvement of public authorities from the early stages will be a key factor for future deployment.
Figure 1: SAFESPOT cooperative apllications in intersections
35

Figure 2: V2I and V2V communications at SAFESPOT research project
Figure 3: Creation of a dynamic local network
The COOPERS project is focused on the application of a real time data communication between in-frastructure and vehicle to exchange safety related information (e.g. speed, road conditions, lane change bypassing, local traffic conditions, etc.) with respect to the actual conditions of a certain road segment. Theproject concept is based on the idea of convergent networks for car - infrastructure and infrastructure - carcommunication for seamless services along the travel chain.For drivers the following services are planned:
• Local traffic jam alert with video pictures (tactical traffic information)
• In-car display and alert of area-specific speed limits
• Selective traffic jam warning and guidance based on current traffic situation on highway segments
• Short term ETA (Estimated Time of Arrival) based on current traffic situation on the road network.
36

For the road operators the following services are planned:
• Dynamical interaction with locally changing transport demands
• Distribution of safety related information directly to the vehicles in the related road segment (tacticaltraffic information)
• Enhanced traffic management based on FCD (Floating Car Data)
• Safety related traffic information for drivers, speed and distance guidance
• Data exchange between motorway operators for international seamless service handover
• Common development of transport flows monitoring and information exchange on European Corridors
Figure 4: COOPERS scenario
CVIS, SAFESPOT and COOPERS started at the beginning of 2006 and it is anticipated that theyall give significant contribution to the goals of the European Commission.
Sources:European Commission, ”Raising Awareness of ICT for Smarter, Safer and Cleaner Vehicles”, Brussels, 15-2-2006 COM (2006) 59 finalCommunication from the Commission on the Intelligent Car Initiative - ”Raising Awareness of ICT forSmarter, Safer and Cleaner Vehicles”, 15 February 2006European CARE DatabaseERTICO web-site http://www.ertico.comSAFESPOT web-page http://www.safespot-eu.orgCOOPERS Integrated Project
37

Announcements
Preliminary Call For Papers & Participation: RFID
The IEEE International Conference on RFID 2007 will be held 28-29 March 2007 at the GaylordTexan Resort in Grapevine, Texas. This will be the first in a series of annual conferences dedicatedto addressing the technical and policy challenges in the areas of radio frequency identification (RFID)technologies, RFID supporting large-scale distributed information systems, and RFID applications.This conference is sponsored by IEEE-USA, IEEE New Technology Directions Committee and IEEERegion 5. The technical co-sponsors include: University of Texas-Arlington, IEEE Circuits & SystemsSociety, IEEE Communications Society, IEEE Electron Devices Society, IEEE Engineering in Medicineand Biology Society, and the IEEE Social Implications of Technology Society. Other societies that haveindicated interest in a co-sponsorship are Intelligent Transportation Systems, Microwave Theory andTechniques, Professional Communications.Additional conference information and the preliminary call for papers can be found at: http://www.ieee-rfid.org/2007/.
38

Conferences, Workshops, Symposia
by Massimo Bertozzi and Alessandra Fascioli
This section lists upcoming ITS-related conferences, workshops, or exhibits. Contributions are welcome;please send announcements to [email protected].
6th Wks. on Algorithmic Methods and Models forOptimization of Railwayshttp://algo06.inf.ethz.ch/atmosZurich, SwitzerlandSeptember 14
IEEE 64th Semiannual Vehicular TechnologyConf. (fall)http://www.ieeevtc.org/vtc2006fallMontral, CanadaSeptember 25-28
Handling Uncertainty in Transportation: Analyses,New Paradigms, Applications and Comparisonshttp://www.poliba.it/ewgt2006/Bari, ItalySeptember 17–29
ITS World Congress 2006http://www.itsworldcongress.comLondon, UKOctober 8–12
VI Spanish Congress on ITSVigo, SpainOctober 17–19
Intl. Congress Motor Vehicle & Transportationhttp://www.mec.upt.ro/mvt2006Timisoara, RomaniaNovember 15–17,♦ submission by September 10
Transpo2006 - Empowering Our Mobile Societyhttp://www.itstranspo.org/Palm Harbor, FL, USANovember 27–30
ITS Middle East Annual Conf.DubaiDecember 4–5
The Intelligent Future of Transport in IndiaNew Delhi, India
February 1–2, 2007Intertraffic Chinahttp://www.china.intertraffic.com/intertrafficchina2007/eBeijing, ChinaMarch 15–17, 2007
4th Intl. Wks. on Intelligent Transportationhttp://wit.tu-harburg.deHamburg, GermanyMarch 20–21, 2007,♦ submission by November 17
4th SASITS Intl. Conf. & ExhibitionPretoria, South AfricaMarch 6–8, 2007
IEEE 65st Semiannual Vehicular TechnologyConf. (spring)Dublin, IrelandApril 23–25, 2007,♦ submission by September 16
IAPR Conf. on Machine Vision Applicationshttp://www.cvl.iis.u-tokyo.ac.jp/mvaTokyo, JapanMay 16-18, 2007♦ submission by December 15
6th Triennial Symposium on Transportation Analysishttp://tristan.epfl.chBentota, Sri-LankaJune 10–15, 2007
11th World Conference on Transport Researchhttp://www.uctc.net/wctrsBerkeley, California, USAJune 24–28, 2007
IASTED Robotics and Applicationshttp://www.iasted.org/conferences/home-563.htmlWurzburg, GermanyAugust 29–31, 2007,♦ submission by April 1, 2007
39