Embed Size (px)
Citation preview

Usico Präsentation, 4-Dez-08 Folie 1
Integration of UAV into ATC/ATMIntroduction in the simulation demonstration
Workshop 19.02.2004
Bernd Keck, Elmar Klostermann,Dirk-Roger Schmitt, Volkmar Adam, DLR

Usico Präsentation, 4-Dez-08 Folie 2
2USICO - consortium©
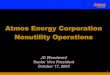
Simulation Concept for UAV Integration
VHF COMSSR transponder
strobe lightsTCAS IIsense & avoid
relay C³ link
Relay Other aircraft
direct C³ link
C-UAV
UAV Control Station
Avionics System( NAV / FMS / AFCS / FTS)
telephone
Air Traffic Control
Comm delay

Usico Präsentation, 4-Dez-08 Folie 3
3USICO - consortium©
UAV events to be evaluated by simulations
i Loss of Thrust (or other emergency case) : squawk 7700
i Communication Failurei Transmitter Failure; squawk 7600i Total Communication Failure; squawk 7600
i Data-Link Loss; squawk 7600
i Communication Failure and Data-Link Loss; squawk 7600
i Transponder Failure (loss of altitude information)
i Avoidance of a severe weather ( Thunderstorm )
i Loss of Separation (to be defined)

Usico Präsentation, 4-Dez-08 Folie 4
4USICO - consortium©
Objectives of ATC/ATM Real Time Simulations
Evaluation of the UAV integration concept:i Normal operations
i Emergency Operations:i Standard emergency procedures:
i Comm Lossi Thrust Loss
iUAV specific emergency proceduresi (additional emergency codes)
Investigation of UAV specifics:i Communication delay for voice and data

Usico Präsentation, 4-Dez-08 Folie 5
5USICO - consortium©
Evaluation Methods
Subjective Measurementsi ISA (Instanteneous Self Assessment)
Objective Measurementsi Time for Communication
i Others
Questionnairesi Post Run Debrief
i NASA-TLXi DFS questionnaire
i Final Debrief Questionnaire

Usico Präsentation, 4-Dez-08 Folie 6
6USICO - consortium©
Simulated Centres
i Frankfurt Arrival (ARR) and Frankfurt Area Control Centre (ACC)
i west-sector "Langen Radar"i radar approach controller "Frankfurt Arrival"

Usico Präsentation, 4-Dez-08 Folie 7
7USICO - consortium©
Simulated AirspaceFIR Frankfurt: TMA Frankfurt & Sector West (modified)
Langen RadarFrankfurt Arrival
dummy sector
dummy sector

Usico Präsentation, 4-Dez-08 Folie 8
8USICO - consortium©
Simulated Traffic
i Arrival traffic EDDF
i Departure traffic EDDF
i Overflights
i UAV TrafficFixed wing MALE departure from West or North from FrankfurtMission requires crossing of TMA Frankfurt

Usico Präsentation, 4-Dez-08 Folie 9
9USICO - consortium©
Simulated MALE UAV
Wing span (m) 22.6
Length (m) 10.68
Normal cruise (kcas) 110
Max. ceiling (ft) 45000

Usico Präsentation, 4-Dez-08 Folie 10
10USICO - consortium©
Controller Working Positions
i Sector West: Langen Radar
i Sector North: dummy
i Sector South: dummy
i TMA: Frankfurt Arrival

Usico Präsentation, 4-Dez-08 Folie 11
11USICO - consortium©
USICO Simulation Room Layout, CWPs
TC
Controller Working Positions
Sector West Pickup
PC TC PC
Supervisor
SV

Usico Präsentation, 4-Dez-08 Folie 12
12USICO - consortium©
Pseudo Pilot Working Positions
i Sector West: 1 pseudo pilot
i Sector North: unmanned, dummy traffic
i Sector South: unmanned, dummy traffic
i TMA: 3 pseudo pilots
i additional: UAV pilots

Usico Präsentation, 4-Dez-08 Folie 13
13USICO - consortium©
USICO Simulation Room Layout, Pseudo Pilots
PP-WP
PP1
PP-WP
PP2
PP-WP
PP3
PP-WP
PP4
Pseudo Pilot Working Positions
PP5 PP6
UAV UAV
UAV Working Positions

Usico Präsentation, 4-Dez-08 Folie 14
14USICO - consortium©
Simulation Environment
Based on ATMOS-2-CASS.
Radari Horizontal representation of aircraft positions.
i Aircraft labels: callsign, altitude, groundspeed.
i Scale factor, geographical area selected by the controller.
i Optional display items: boundaries, sectors, ATC routes, names offixes, range rings

Usico Präsentation, 4-Dez-08 Folie 15
15USICO - consortium©
Label

Usico Präsentation, 4-Dez-08 Folie 16
16USICO - consortium©
Simulation Setup
UAV Pilot (FHS Sim)
Pseudo Pilots
Air Traffic Management and Operations SimulatorATMOS

Usico Präsentation, 4-Dez-08 Folie 17
17USICO - consortium©

Usico Präsentation, 4-Dez-08 Folie 18
18USICO - consortium©

Usico Präsentation, 4-Dez-08 Folie 19
19USICO - consortium©
Simulation Environment
Communicationi Telephone communication between sector controller and arrival controller
i Telephone communication between controller and UAV pilot if requested
Simulated Radio Telephonyi Radio telephony for the controller / pseudo pilot voice communication
specially designed intercommunication deviceoperation over wire link
i Communication delay for satellite link is implemented:i 1.5 s

Usico Präsentation, 4-Dez-08 Folie 20
20USICO - consortium©
USICO Simulation Runs (Example)
Scenario No. 1Name usico_1_uav_efScenario Description Engine failure of an UAVUAV Mission Description tbdSimulation Area FIR FrankfurtWorking Positions
Controller Working PositionEDDF, West Sector: 2 controller (TC, PC)EDDF, South Sector dummyEDDF, North Sector dummyEDDF, Arrival 2 controller (TC, PC)EDDF, Feeder not used
Pseudo Pilot Working PositionNormal Aircraft 4 pseudo pilotsUAV Traffic 1 UAV pseudo pilot

Usico Präsentation, 4-Dez-08 Folie 21
21USICO - consortium©
USICO Simulation Runs (Example cont)
StatisticsTotal Number of aircraft: 40
Arrival aircrafts: 30Overflights: 10UAV: 1
PercentageWeight Classes SectorsH 30 %, 33 % WestM 60 %, 33 % NorthL 10 % 33 % South

Usico Präsentation, 4-Dez-08 Folie 22
22USICO - consortium©
Let‘s start

Usico Präsentation, 4-Dez-08 Folie 23
23USICO - consortium©

Usico Präsentation, 4-Dez-08 Folie 24
24USICO - consortium©

Usico Präsentation, 4-Dez-08 Folie 25
25USICO - consortium©

Usico Präsentation, 4-Dez-08 Folie 26
26USICO - consortium©

Usico Präsentation, 4-Dez-08 Folie 27
27USICO - consortium©
Seq 30_1th_03.gif

Usico Präsentation, 4-Dez-08 Folie 28
28USICO - consortium©

Usico Präsentation, 4-Dez-08 Folie 29
29USICO - consortium©
Seq 75_1th_02_c_noerdl_kurz_Logo.gif

Usico Präsentation, 4-Dez-08 Folie 30
30USICO - consortium©

Usico Präsentation, 4-Dez-08 Folie 31
31USICO - consortium©
Seq 75_1th_02_c_noerdl_lang_Logo.gif

Usico Präsentation, 4-Dez-08 Folie 32
32USICO - consortium©
Demonstrations
Three Groups: G1, G2, G3
i ATM/ATC integration, Emergency proceduresi Collision Avoidance Systemi Enhanced Vision Systems
All groups will see everything
Now: Lunch

Usico Präsentation, 4-Dez-08 Folie 33
33USICO - consortium©

Usico Präsentation, 4-Dez-08 Folie 34
34USICO - consortium©
First Resultsbased on controllers‘s comments
iGeneralNo special problems with UAV in airspaceIntegration concept allows treatment of UAV like normal aircraft
Relay
C-UAV
UAV ControlStation
Air TrafficControl

Usico Präsentation, 4-Dez-08 Folie 35
35USICO - consortium©
First Resultsbased on controllers‘s comments (cont 1)
iEmergency Codes7600 for data link loss and comm loss appropriate7700 for unpredictable emergency behaviour only

Usico Präsentation, 4-Dez-08 Folie 36
36USICO - consortium©
iTelephone comm between controller and UAVpilot is a benefitcompared to manned aircraft
UAV Control Station Air Traffic Control
First Resultsbased on controllers‘s comments (cont 2)

Usico Präsentation, 4-Dez-08 Folie 37
37USICO - consortium©

Usico Präsentation, 4-Dez-08 Folie 38
38USICO - consortium©

Usico Präsentation, 4-Dez-08 Folie 39
39USICO - consortium©
Simulated Airspace
i FIR Frankfurt:i Sector West (modified)i TMA Frankfurt

Usico Präsentation, 4-Dez-08 Folie 40
40USICO - consortium©
Simulated Airports
USICO will simulate the approach traffic of Frankfurt (and Hahn or anotherpotential UAV airfield )

Usico Präsentation, 4-Dez-08 Folie 41
41USICO - consortium©
Simulation Concept for UAV Integration
Relay
C-UAV
UAV Control Station Air Traffic Control

Usico Präsentation, 4-Dez-08 Folie 42
42USICO - consortium©
Simulation Concept for UAV Integration
UAV Control Station Air Traffic Control