Embed Size (px)
Citation preview

Integration of sustainable energy sources through powerelectronic converters in small distributed electricitygeneration systemsTao, H.
DOI:10.6100/IR632347
Published: 01/01/2008
Document VersionPublisher’s PDF, also known as Version of Record (includes final page, issue and volume numbers)
Please check the document version of this publication:
• A submitted manuscript is the author's version of the article upon submission and before peer-review. There can be important differencesbetween the submitted version and the official published version of record. People interested in the research are advised to contact theauthor for the final version of the publication, or visit the DOI to the publisher's website.• The final author version and the galley proof are versions of the publication after peer review.• The final published version features the final layout of the paper including the volume, issue and page numbers.
Link to publication
Citation for published version (APA):Tao, H. (2008). Integration of sustainable energy sources through power electronic converters in smalldistributed electricity generation systems Eindhoven: Technische Universiteit Eindhoven DOI: 10.6100/IR632347
General rightsCopyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright ownersand it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights.
• Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal ?
Take down policyIf you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediatelyand investigate your claim.
Download date: 17. Feb. 2018

Integration of sustainable energy sources
through power electronic converters
in small distributed electricity
generation systems
PROEFSCHRIFT
ter verkrijging van de graad van doctor aan deTechnische Universiteit Eindhoven, op gezag van de
Rector Magnificus, prof.dr.ir. C.J. van Duijn, voor eencommissie aangewezen door het College voor
Promoties in het openbaar te verdedigenop maandag 21 januari 2008 om 16.00 uur
door
Haimin Tao
geboren te Zhejiang, China

Dit proefschrift is goedgekeurd door de promotoren:
prof.dr.ir. A.J.A. Vandenput
en
prof.dr. X. He
Copromotor:
ir. M.A.M. Hendrix
This work was supported by the Dutch funding agency for university research,Technologiestichting STW
Copyright c©2008 H. Tao
Printed by Eindhoven University Press, The NetherlandsCover design by Haimin Tao
CIP-DATA LIBRARY TECHNISCHE UNIVERSITEIT EINDHOVEN
Tao, Haimin
Integration of sustainable energy sources through power electronic converters insmall distributed electricity generation systems / by Haimin Tao. - Eindhoven :Technische Universiteit Eindhoven, 2008.Proefschrift. - ISBN 978-90-386-1734-3NUR 959Trefw.: statische omzetters / vermogenselektronica / elektrische energie ;opwekking / invertoren.Subject headings: power convertors / power electronics / distributed powergeneration / invertors.

Integration of sustainable energy sources
through power electronic converters
in small distributed electricity
generation systems
by
Haimin Tao
Members of the doctoral defense committee:
prof.dr.ir. A.C.P.M. Backx (Chairman)
prof.dr.ir. A.J.A. Vandenput (Eindhoven University of Technology, 1st supervisor)
prof.dr. X. He (Zhejiang University, China, 2nd supervisor)
ir. M.A.M. Hendrix (Eindhoven University of Technology, Co-supervisor)
prof.dr.ir. R.W. De Doncker (RWTH Aachen, Germany)
prof.dr.ir. A. Van den Bossche (Ghent University, Belgium)
prof.dr.ir. J.H. Blom (Eindhoven University of Technology)
dr. J.L. Duarte (Eindhoven University of Technology, Advisor)


To Yanmei and Yuyou ...


Summary
Integration of sustainable energy sources
through power electronic converters
in small distributed electricity
generation systems
This thesis aims to investigate how sustainable electricity generators such asfuel cells and photovoltaics and appropriate storage elements like batteries andsupercapacitors are best integrated in energy systems suitable for domestic appli-cation. Research topics in this context include bidirectional and multiport dc-dcconverter topologies, modeling and control of power converters, means for storingenergy, system power flow management, public utility interconnection system, andpower quality control.
For integrating primary sources and energy storage, a multiport system struc-ture is proposed. Compared with the conventional structure that uses multipleconverters, a multiport converter promises integrated power conversion by utiliz-ing only a single power processing stage.
An extensive topology study resulted in a family of multiport bidirectionaldc-dc converters based on several basic bidirectional switching cells and a generaltopology that combines a dc-link with magnetic-coupling. A multiport bidirec-tional converter can be constructed from the proposed basic bidirectional switch-ing cells. The presented converter concept provides a method to integrate powersources with widely differing characteristics. Furthermore, based on the interleav-ing technology, solutions for high-power applications are provided. The proposedbasic bidirectional switching cells are extended to polyphase interleaved versions.
The implementation has been focused on three-port energy management sys-tems. Three converter topologies were implemented, namely, the three-port triple-active-bridge (TAB) converter, a two-input bidirectional converter that combinesa dc-link with magnetic-coupling, and the triple-half-bridge (THB) converter, alltaking a fuel cell and supercapacitor generation/storage system as an example.The three-port system is modeled using an averaged circuit model, and controlstrategies based on a multiple-feedback-loop scheme were developed, aiming at
vii

viii Summary
tight regulation of the load voltage and prevention of load transients from affect-ing the operation of the primary source.
In order to accommodate specific operating characteristics of the sources andstorage elements (for instance, wide operating voltages), several improvements forthe proposed converter topologies were made, aiming at soft-switching, reducedcurrent stress, and higher efficiency. The developed control methods include dutyratio (volt-seconds balance) control for the three-port TAB converter, variablehysteresis band control, and asymmetrical wave control.
The three converter topologies were verified with laboratory prototypes. Theperformance of the converters was investigated for a closed-loop control imple-mented with different digital signal processors (DSPs). The power flow in thesystem is proved to be controllable. A substantial improvement in the efficiencywhen using the soft-switching control method is observed. Practical issues like softstart-up and generation of high-resolution digital phase shift were discussed.
The second part of the work is the PWM inverter control and grid interconnec-tion of small energy generation systems, taking power quality control into account.Small distributed generation (DG) systems provide standby service during gridoutages and, when operated during peak load hours, potentially reduce energycosts. A high-performance PLL for a single-phase inverter is realized by means ofa transport delay which generates a virtual quadrature signal and an orthogonalfilter is used to enhance the PLL performance when the grid voltage is distorted.To achieve zero steady-state error for both the voltage and current regulations,and to implement selective harmonic compensation, resonant controllers are used.For controlling single-phase inverters, proportional resonant (PR) controllers caneliminate the steady-state error and are more stable than a proportional-integral(PI) controller.
At the system level, a line-interactive fuel cell UPS/DG system was proposed,designed, and tested. The power processing unit comprises a TAB converter anda grid-interfacing inverter. The system can flexibly operate in stand-alone orgrid-connected mode. An automatic and smooth transition between the two oper-ating modes can be achieved by using a static transfer switch and ramping up thereference signal in a few consecutive grid cycles during the transition. A genera-tion system can simultaneously be operated as an active filter to deal with localharmonic-producing loads. The active filtering function is integrated into the sys-tem and realized solely by the control software. It is shown that a supercapacitorin the system compensates for the instantaneous power fluctuations, overcomesthe slow dynamics of the fuel cell, and handles the periodical low-frequency ripplein the power drawn by the inverter. This advantage eliminates otherwise neededenergy buffers in the rest of the system as long as a sufficient control bandwidthof the TAB converter is guaranteed.

Contents
Summary vii
1 Introduction 11.1 Alternative power generation systems . . . . . . . . . . . . . . . . 2
1.1.1 Solar energy . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.1.2 Wind energy . . . . . . . . . . . . . . . . . . . . . . . . . . 21.1.3 Micro combined heat and power . . . . . . . . . . . . . . . 31.1.4 Fuel cell generator . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 System structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2.1 Conventional structure . . . . . . . . . . . . . . . . . . . . . 51.2.2 Multiport structure . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Literature overview . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.3.1 Bidirectional dc-dc converters . . . . . . . . . . . . . . . . . 81.3.2 Unidirectional dc-dc converters . . . . . . . . . . . . . . . . 121.3.3 Multiport dc-dc converters . . . . . . . . . . . . . . . . . . 15
1.4 Overview of the thesis . . . . . . . . . . . . . . . . . . . . . . . . . 241.4.1 Motivation and objective . . . . . . . . . . . . . . . . . . . 241.4.2 Outline of the thesis . . . . . . . . . . . . . . . . . . . . . . 25
1.5 Contributions of this work . . . . . . . . . . . . . . . . . . . . . . . 27
I Multiport bidirectional dc-dc converters 29
2 Triple-active-bridge converter 312.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.2 Dual-active-bridge (DAB) topology . . . . . . . . . . . . . . . . . . 332.3 Triple-active-bridge (TAB) topology . . . . . . . . . . . . . . . . . 342.4 System power flow modeling . . . . . . . . . . . . . . . . . . . . . . 362.5 Control strategies for the TAB converter . . . . . . . . . . . . . . . 38
2.5.1 PI and feedforward control . . . . . . . . . . . . . . . . . . 382.5.2 Dual-PI-loop control . . . . . . . . . . . . . . . . . . . . . . 39
2.6 Simulation of the TAB converter . . . . . . . . . . . . . . . . . . . 402.6.1 Open-loop operation . . . . . . . . . . . . . . . . . . . . . . 40
ix

x CONTENTS
2.6.2 Closed-loop control . . . . . . . . . . . . . . . . . . . . . . . 41
2.6.3 Battery charging . . . . . . . . . . . . . . . . . . . . . . . . 42
2.6.4 Start-up stage considerations . . . . . . . . . . . . . . . . . 43
2.7 Analysis of system loss . . . . . . . . . . . . . . . . . . . . . . . . . 45
2.7.1 Active and reactive power in the DAB converter . . . . . . 45
2.7.2 Rms current analysis . . . . . . . . . . . . . . . . . . . . . . 47
2.8 System average model derivation . . . . . . . . . . . . . . . . . . . 49
2.8.1 DAB converter small signal average model . . . . . . . . . . 49
2.8.2 TAB converter small signal average model . . . . . . . . . . 50
2.8.3 First harmonic approach . . . . . . . . . . . . . . . . . . . . 52
2.9 High-power three-phase TAB converter . . . . . . . . . . . . . . . . 54
2.9.1 Three-phase TAB topology . . . . . . . . . . . . . . . . . . 54
2.9.2 Three-port three-phase system modeling . . . . . . . . . . . 55
2.9.3 Symmetrical transformer design . . . . . . . . . . . . . . . . 58
2.9.4 Control strategy . . . . . . . . . . . . . . . . . . . . . . . . 60
2.9.5 Simulation results of the three-phase TAB converter . . . . 60
2.10 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3 Soft-switched TAB converter 65
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.2 Duty ratio control for the DAB topology . . . . . . . . . . . . . . . 67
3.2.1 DAB converter with duty ratio control . . . . . . . . . . . . 67
3.2.2 Inner mode . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
3.2.3 Outer mode . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
3.2.4 Power flow calculation . . . . . . . . . . . . . . . . . . . . . 71
3.3 Duty ratio control for the TAB topology . . . . . . . . . . . . . . . 72
3.3.1 TAB converter with duty ratio control . . . . . . . . . . . . 72
3.3.2 Analysis of ZVS conditions . . . . . . . . . . . . . . . . . . 73
3.3.3 Extension of duty ratio control . . . . . . . . . . . . . . . . 76
3.4 Control strategy for the fuel cell and supercapacitor system . . . . 77
3.5 System modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
3.5.1 Duty ratio controlled DAB converter . . . . . . . . . . . . . 78
3.5.2 Duty ratio controlled TAB converter . . . . . . . . . . . . . 79
3.5.3 Decoupling of the two control loops . . . . . . . . . . . . . 82
3.6 Implementation issues . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.6.1 DSP implementation . . . . . . . . . . . . . . . . . . . . . . 83
3.6.2 Digital PI controllers . . . . . . . . . . . . . . . . . . . . . . 85
3.6.3 Magnetic components design . . . . . . . . . . . . . . . . . 87
3.7 Simulation and experimental results . . . . . . . . . . . . . . . . . 90
3.7.1 Simulation results . . . . . . . . . . . . . . . . . . . . . . . 90
3.7.2 Experimental results . . . . . . . . . . . . . . . . . . . . . . 93
3.8 Methods for soft start-up . . . . . . . . . . . . . . . . . . . . . . . 96
3.9 Duty ratio control for N -port topology . . . . . . . . . . . . . . . . 98
3.10 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99

CONTENTS xi
4 Topology combining dc-link and magnetic-coupling 1014.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1024.2 Topology description and operating principles . . . . . . . . . . . . 102
4.2.1 Topology description . . . . . . . . . . . . . . . . . . . . . . 1024.2.2 Principle of operation . . . . . . . . . . . . . . . . . . . . . 103
4.3 Analysis of soft-switching conditions . . . . . . . . . . . . . . . . . 1064.3.1 ZVS conditions for HB2 and HB3 . . . . . . . . . . . . . . . 1064.3.2 ZVS condition for HB1 . . . . . . . . . . . . . . . . . . . . 108
4.4 Control strategy and power flow management . . . . . . . . . . . . 1094.4.1 Direct fuel cell current-mode control . . . . . . . . . . . . . 1094.4.2 Power flow management . . . . . . . . . . . . . . . . . . . . 111
4.5 Simulation and experimental verifications . . . . . . . . . . . . . . 1114.5.1 Simulation results . . . . . . . . . . . . . . . . . . . . . . . 1114.5.2 Measurement results . . . . . . . . . . . . . . . . . . . . . . 112
4.6 Soft-switching control methods . . . . . . . . . . . . . . . . . . . . 1144.6.1 Variable hysteresis band control . . . . . . . . . . . . . . . . 1144.6.2 Asymmetrical wave control . . . . . . . . . . . . . . . . . . 1174.6.3 Multiloop control strategy . . . . . . . . . . . . . . . . . . . 1194.6.4 Verification of the ZVS control methods . . . . . . . . . . . 120
4.7 Discussion and topology extension . . . . . . . . . . . . . . . . . . 1234.7.1 Full-bridge counterpart . . . . . . . . . . . . . . . . . . . . 1234.7.2 Topology extension . . . . . . . . . . . . . . . . . . . . . . . 124
4.8 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
5 Triple-half-bridge converter 1295.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1305.2 Topology description and analysis . . . . . . . . . . . . . . . . . . . 130
5.2.1 Triple-half-bridge (THB) topology . . . . . . . . . . . . . . 1305.2.2 PWM control . . . . . . . . . . . . . . . . . . . . . . . . . . 1325.2.3 Soft-switching principle . . . . . . . . . . . . . . . . . . . . 1325.2.4 Power flow calculation . . . . . . . . . . . . . . . . . . . . . 1365.2.5 Design guidelines . . . . . . . . . . . . . . . . . . . . . . . . 137
5.3 Control scheme and power flow management . . . . . . . . . . . . 1395.4 Simulation and experimental verifications . . . . . . . . . . . . . . 140
5.4.1 Simulation results . . . . . . . . . . . . . . . . . . . . . . . 1405.4.2 Experimental results . . . . . . . . . . . . . . . . . . . . . . 142
5.5 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
6 Family of multiport bidirectional converters 1496.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1496.2 Multiport versus conventional structure . . . . . . . . . . . . . . . 1506.3 Multiport bidirectional converters . . . . . . . . . . . . . . . . . . . 151
6.3.1 General multiport converter topology . . . . . . . . . . . . 1516.3.2 Basic bidirectional switching cells . . . . . . . . . . . . . . . 1546.3.3 Three-port converter – an example . . . . . . . . . . . . . . 155
6.4 Multiport system modeling . . . . . . . . . . . . . . . . . . . . . . 159

xii CONTENTS
6.4.1 Small-signal modeling method . . . . . . . . . . . . . . . . 1596.4.2 Four essential vectors . . . . . . . . . . . . . . . . . . . . . 1606.4.3 State-space system representation . . . . . . . . . . . . . . 161
6.5 Control strategy for multiport systems . . . . . . . . . . . . . . . . 1626.5.1 Power flow management . . . . . . . . . . . . . . . . . . . . 1626.5.2 Conceptual system control strategy . . . . . . . . . . . . . . 163
6.6 Experimental verifications and discussions . . . . . . . . . . . . . . 1656.6.1 Verifications of the three-port topologies . . . . . . . . . . . 1656.6.2 Discussion on multiport converters . . . . . . . . . . . . . . 165
6.7 Topologies for high-power applications . . . . . . . . . . . . . . . . 1666.7.1 Polyphase interleaved structure . . . . . . . . . . . . . . . . 1666.7.2 High-power three-port converter topologies . . . . . . . . . 167
6.8 Power flow in multi-active-bridge topology . . . . . . . . . . . . . . 1686.8.1 MAB topology and power flow modeling . . . . . . . . . . 1686.8.2 Power flow analysis for three operation modes . . . . . . . . 1716.8.3 First harmonic analysis . . . . . . . . . . . . . . . . . . . . 176
6.9 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
II Utility interconnection and system control 181
7 Inverter control and grid interfacing 1837.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1837.2 Control in stand-alone mode of operation . . . . . . . . . . . . . . 184
7.2.1 Two-loop control strategy . . . . . . . . . . . . . . . . . . . 1857.2.2 Proportional-resonant (PR) controller . . . . . . . . . . . . 186
7.3 Control in grid-connected mode of operation . . . . . . . . . . . . . 1877.3.1 Current regulation for single-phase inverters . . . . . . . . . 1887.3.2 Selective harmonic compensation . . . . . . . . . . . . . . . 189
7.4 High-performance PLL design . . . . . . . . . . . . . . . . . . . . . 1907.4.1 Transport delay . . . . . . . . . . . . . . . . . . . . . . . . . 1917.4.2 Orthogonal filter . . . . . . . . . . . . . . . . . . . . . . . . 191
7.5 Grid status detection . . . . . . . . . . . . . . . . . . . . . . . . . . 1947.6 Simulation and experimental results . . . . . . . . . . . . . . . . . 195
7.6.1 Inverter operation in stand-alone mode . . . . . . . . . . . 1977.6.2 Inverter operation in grid-connected mode . . . . . . . . . . 1987.6.3 Operation of the PLL . . . . . . . . . . . . . . . . . . . . . 199
7.7 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204
8 Line-interactive fuel cell UPS/DG system 2058.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2058.2 Description of the UPS/DG system . . . . . . . . . . . . . . . . . . 2078.3 Flexible operation . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
8.3.1 Stand-alone mode of operation . . . . . . . . . . . . . . . . 2098.3.2 Grid-connected mode of operation . . . . . . . . . . . . . . 2108.3.3 Seamless transition between the two modes . . . . . . . . . 211

CONTENTS xiii
8.4 Combining generation with active filtering . . . . . . . . . . . . . . 2118.4.1 Inverter current reference calculation . . . . . . . . . . . . . 2118.4.2 System control strategy . . . . . . . . . . . . . . . . . . . . 213
8.5 System function extension . . . . . . . . . . . . . . . . . . . . . . . 2148.5.1 Unified power quality conditioner . . . . . . . . . . . . . . . 2148.5.2 Energy management . . . . . . . . . . . . . . . . . . . . . . 215
8.6 Verification of power decoupling . . . . . . . . . . . . . . . . . . . . 2168.6.1 Simulation results . . . . . . . . . . . . . . . . . . . . . . . 2168.6.2 Measurement results . . . . . . . . . . . . . . . . . . . . . . 216
8.7 Resolution and limit cycle . . . . . . . . . . . . . . . . . . . . . . . 2178.7.1 Resolution of digital PWM and phase shift . . . . . . . . . 2178.7.2 High-resolution phase shift with TMS320F280x DSP . . . . 218
8.8 DSP implementation of the system control . . . . . . . . . . . . . . 2218.8.1 Control of the dc-dc and dc-ac stages . . . . . . . . . . . . 2218.8.2 State-of-charge management of the supercapacitor . . . . . 224
8.9 System prototyping . . . . . . . . . . . . . . . . . . . . . . . . . . . 2258.9.1 Prototype structure . . . . . . . . . . . . . . . . . . . . . . 2268.9.2 Multicell paralleling . . . . . . . . . . . . . . . . . . . . . . 2268.9.3 System design parameters . . . . . . . . . . . . . . . . . . . 2278.9.4 Photographs of the prototype . . . . . . . . . . . . . . . . . 2308.9.5 Hydrogen infrastructure . . . . . . . . . . . . . . . . . . . . 2308.9.6 The DSP board . . . . . . . . . . . . . . . . . . . . . . . . . 2308.9.7 The fuel cell . . . . . . . . . . . . . . . . . . . . . . . . . . . 2308.9.8 The supercapacitor . . . . . . . . . . . . . . . . . . . . . . . 232
8.10 Experimental results . . . . . . . . . . . . . . . . . . . . . . . . . . 2328.10.1 Dc-dc stage operation . . . . . . . . . . . . . . . . . . . . . 2338.10.2 Dc-ac stage operation . . . . . . . . . . . . . . . . . . . . . 2348.10.3 Efficiency evaluation . . . . . . . . . . . . . . . . . . . . . . 235
8.11 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238
III Conclusions 239
9 Conclusions and recommendations 2419.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2419.2 Recommendations . . . . . . . . . . . . . . . . . . . . . . . . . . . 245
IV Appendices 247
A Transformer T-model and ∆-model conversion 249A.1 T-model to ∆-model conversion . . . . . . . . . . . . . . . . . . . . 249A.2 ∆-model to T-model conversion . . . . . . . . . . . . . . . . . . . . 250
B Voltage duty ratio and rms loss 253B.1 Rms loss in the DAB converter . . . . . . . . . . . . . . . . . . . . 253B.2 Rms loss in the TAB converter . . . . . . . . . . . . . . . . . . . . 254

xiv CONTENTS
C Derivation of power flow equations 259C.1 Mode I: two square-waves . . . . . . . . . . . . . . . . . . . . . . . 259C.2 Mode II: square-wave and rectangular-pulse-wave . . . . . . . . . . 260C.3 Mode III: two rectangular-pulse-waves . . . . . . . . . . . . . . . . 262
D Laplace transformation in a rotating reference frame 267
E List of symbols 271
F List of acronyms 279
G List of publications 281
Bibliography 285
Samenvatting 297
Acknowledgments 299
Curriculum vitae 301

Chapter 1
Introduction
The global average air temperature at the surface of the Earth has increased byabout 0.74 oC over the past century, and is likely to continue rising [1]. Humanactivities such as burning fossil fuels cause emission of the greenhouse gases (mainlycarbon dioxide) that contribute to global warming. Electricity generation is oneof the major contributors to environmental problems. Thus, development of cleanenergy sources becomes increasingly important to the global environment.
Furthermore, we human beings are challenged by the depletion of fossil fuelreserves. Green energy sources that allow for sustainable development are thereforebecoming more interesting. Our present standard of living can only be maintainedby tapping sustainable sources of energy such as solar power, wind power, hydropower, wave power, geothermal power, tidal power, biomass, and others. The wayenergy is generated and supplied will undergo a fundamental change.
As most sustainable energy is harvested as electricity, innovations in electricpower conversion technology are crucial for the economic feasibility of the use ofsustainable energy. This work investigates how sustainable electricity generatorssuch as fuel cells and photovoltaics and appropriate storage elements like batteriesand supercapacitors (also named ultracapacitors) are best integrated in energysystems suitable for domestic application. Power electronic converters provide theelectrical interface between the sources, storage, and loads, and the availabilityof reliable and low-cost converters will accelerate the deployment of sustainableenergy systems. From a power electronic point of view, fundamental researchtopics in the above context are
• novel converter topologies,
• converter control and modeling,
• means for energy storage,
• system power flow management,
• power quality control,
• public utility interconnection system,
• generator control and protection, etc.
1

2 Chapter 1. Introduction
1.1 Alternative power generation systems
Alternative generation systems that utilize renewable energy sources are gainingpopularity due to their high operation efficiencies and low CO2 emission levels. To-day, in the fields of electric power systems and power electronics a lot of researcheffort is being put into the development of alternative electricity generation sys-tems. We are turning to clean and safe sustainable energy sources such as wind,photovoltaic, and fuel cells that, as believed, will contribute to a secure energyfuture. Introduced in the following are some widely developed clean generationsystems, with a special attention paid to small scale ones.
1.1.1 Solar energy
Solar energy, regarded as being inexhaustible in a time frame relevant to the humanrace, is a truly renewable energy source. Sunlight can be directly converted intoelectricity by a photovoltaic (PV) system, which uses the photovoltaic effect ofsemiconductors. The output power of PV systems ranges from a few watts forportable applications such as calculators, to megawatt power stations. Solar arrayshave been used to power satellites and spacecraft, and in remote areas as a sourceof energy for applications such as roadside emergency telephones, remote sensing,and off-grid home power [2].
Except high initial installation cost, which is expected to decline considerablyin the coming years, PV systems are very promising in the alternative energygeneration market, particularly for powering private buildings.
The easiest way to use electricity generated by PV systems is to connect thesolar panels to the utility grid through an inverter. PV arrays produce power onlywhen illuminated. The production of electricity from solar sources depends on theamount of light energy. For stand-alone or grid-interactive PV systems, a largeenergy storage mechanism, commonly being batteries, is often used to store thecaptured electrical energy so that the energy can be made available for use whenthe sun is not shining. Furthermore, as a backup source of power the storagecan also level transient power in the system and provide for excessive load powerdemand peaks.
1.1.2 Wind energy
The amount of wind energy around the world is enormous. Wind energy is clean,renewable, and widely distributed. In small scale individual turbines wind poweris used to supply electricity to rural residences or locations where the power gridis not accessible. In large scale wind farms it is used to generate energy for electricgrids.
To convert the kinetic wind energy into electricity, wind turbines are used.These range from a few hundred watt generators for residential use to severalmegawatt machines for wind farms and offshore. In fact, in remote areas smallwind turbines in combination with battery storage have been used for householdelectricity generation over many decades [3]. Furthermore, in the areas where the

1.1. Alternative power generation systems 3
power grid is accessible, rooftop mounted small scale wind turbines can generatepower for household use to alleviate power distribution problems and can provideemergency power when utility power fails.
However, like solar energy, the availability of wind energy is uncertain, heavilyrelying on the weather. Furthermore, the output power of a wind turbine is noteasily controllable because of the large inertia of the wind turbine blades. Ittherefore needs to be backed by storage, when stand-alone operation is desired.To compensate for the varying power output, grid-connected wind turbines mayutilize the power grid as a virtual energy buffer.
1.1.3 Micro combined heat and power
Cogeneration is already well established in industry, but for small scale privateuse, micro combined heat and power (microCHP) systems are still in development.CHP systems provide a source of heat by utilizing the waste heat of the electricalgenerating process, thus promising a high utilization of the primary energy source.MicroCHP systems can replace existing hot water boilers and operate in singlehomes, apartment complexes, or small commercial buildings, providing both heatand power.
Most microCHP systems use natural gas for fuel because it is the cleanestfossil fuel, is widely available, and easily transported through pipelines. In thefuture biomass and hydrogen based fuels may be considered. Currently, microCHPsystems are based on several different technologies including internal combustionengines, Stirling engines, steam engines, microturbines and fuel cells [4].
Unlike industrial CHP systems, microCHP systems are usually driven by heat-demand, delivering electricity as a byproduct. Due to the fluctuating electric powerdemand of the facilities, some kind of electrical energy storage mechanism cantherefore improve the system’s performance and overall energy efficiency. Whenthe system is expected to deliver backup power during utility outage, storagebecomes necessary.
In the Netherlands, microCHP projects are being field-tested and demonstratedin several cities [5]. As a transition technology toward a truly sustainable energysystem, microCHPs promise higher efficiency and lower CO2 emission than con-ventional coal-burning power plants.
1.1.4 Fuel cell generator
Fuel cells are electrochemical energy conversion devices that convert hydrogen-richfuel and oxygen into water, generating electricity and heat. As an environmentallyfriendly energy conversion technology, fuel cells have the potential to revolutionizepower generation. Fuel cells have many advantages. By direct energy conver-sion, fuel cells enable higher efficiency [6], thereby making them a promising cleanpower solution for applications as small as cell phones to as large as utility powergeneration.
A typical fuel cell system consists of a fuel processor, fuel cell stack, and powerelectronic interface. Usually, a fuel cell produces a dc voltage from hydrogen-rich

4 Chapter 1. Introduction
fuel gas and air that flow over two cell electrodes. The principal by-productsare water, carbon dioxide and heat1. Among various kinds of fuel cells, polymerelectrolyte membrane (PEM) (also named proton exchange membrane) fuel cellsprovide a high output power density at room temperature, and relative ease ofstart-up and shut down [6].
The major problem associated with fuel cell applications is that fuel cells have along time constant because of the slow fuel supply regulation and hydration control.Thus, effective implementation of a fuel cell system requires energy storage. Itshould also be noted that a fuel cell is a weak power source and its operatingoutput dc voltage is widely variable depending on the fuel flow rate and the powerit supplies [6].
As the demand for various applications such as remote power, backup sys-tems, and distributed generation increases, fuel cell systems are anticipated to bewidespread. So far, the use of fuel cells in residential power generation has beenlimited by cost considerations, but prices are decreasing. The use of fuel cells forelectricity and heat generation for home applications is generating interest [7].
In summary, in terms of power availability and system dynamics, the aforemen-tioned generation systems have in common that the generated power is not idealfor immediate use. The primary power needs to be conditioned. In most cases, anincorporated storage mechanism would increase the system performance or realizeadded functionality, for example, the system can operate in both stand-alone andgrid-connected modes.
In this study, the main focus is on fuel cell systems. Medium-/low-powerfuel cell systems find application mainly in electric vehicles and residential powergeneration. For both applications power electronics is a key element that interfacesthe primary source and the storage to the rest of the system. The design ofthe power conditioning system, which concerns the choice of a suitable convertertopology and control strategy, is a challenging task. The energy management in astorage-backed fuel cell system should consider the optimum energy usage control,start-up control, load transient control, and charging and discharging controls forthe storage. The design of the power conditioning system should take the followingitems into account:
• maximum utilization of the primary source;
• easy power flow management;
• simplest possible converter topology;
• system voltage ratio requirements;
• isolation requirements;
• energy storage requirements;
• easy implementation and low cost, etc.
1For a pure hydrogen fuel cell, the by-products are only water and heat.

1.2. System structure 5
Isolated
Isolation?
Nonisolated
Transformer
frequency?
HF transformer LF transformer
(e.g., 50Hz)
Battery
voltage rating?
HV ac-link HV dc-link
Fuel cell
voltage rating?
HV fuel cell
HV battery LV battery
Cycloconverter
Battery
voltage rating?
In parallel with
fuel cell
Via dc-dc
converter
LV: low-voltage
HV: high-voltage
LF: low-frequency
HF: high-frequency
LV fuel cell
HV battery
In parallel with
HV dc-bus
LV battery
Battery
position?
Via dc-dc
converterOn the main
power flow path
In parallel with
fuel cell
Isolation?
Nonisolated Isolated
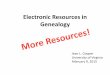
Figure 1.1: Various system structures for a fuel cell and battery generation system.
1.2 System structure
Power electronics for generation systems usually contains a dc-dc and a dc-acstage. In the following discussion only the dc-dc stage is considered. Basically,two system structures have been reported by researchers, namely the conventionalstructure based on separate converter stages and the multiport structure based ona single power conversion stage.
1.2.1 Conventional structure
The conventional structure of a fuel cell system reported in the open literatureis illustrated roughly in Fig. 1.1 [8]. The main considerations are the isolationrequirements and the voltage rating of the fuel cell and the storage. Because ofthe diversity of fuel cells and storage devices it is not possible to choose just onetopology considered as the best.
The main structural concern of a fuel cell power conditioning system is the

6 Chapter 1. Introduction
Storage
Fuel
cell
Storage
Fuel
celldc-dc
(a) (b)
Fuel
cell
(c)
StorageBidirectional
dc-dc
converter
Inverter
dc-dc Inverter
Inverter
Figure 1.2: Different battery positions in a fuel cell system, showing (a) in parallel withthe fuel cell, (b) on the main power flow path, and (c) connected to the dcbus through a bidirectional dc-dc converter.
position of the storage (e.g., batteries). As illustrated in Fig. 1.2(a), batteries maybe connected in parallel with the fuel cell. With this configuration, the fuel cellis effectively a battery charger. The fuel cell current, however, is not controlleddirectly. The mismatch between fuel cell and battery impedance also presents aproblem [8]. As shown in Fig. 1.2(b), batteries can also be on the main powerflow path to define a bus voltage, but high-voltage batteries are not a good choicebecause of their cost and reliability. A dc-dc converter (e.g., boost converter)can be placed between the fuel cell and the battery. The converter controls thecurrent taken from the fuel cell. In the scheme shown in Fig. 1.2(c), batteries areplaced outside the main power flow path and connected to the dc bus througha bidirectional dc-dc converter. The converter acts as an active filter to improvethe dynamic response and to level the power difference between the generator andthe load [9]. An advantage of this configuration is that it is possible to choose anoptimal battery voltage. Note that in some applications the dc-dc converter thatconnects the fuel cell is not used (see e.g., Fig. 1.3).
Traditionally, individual converters are used to provide interfaces for powerinputs of the system. In principle, any basic power electronics topology can beused to design a power converter for a fuel cell system.
For diverse applications, different system configurations were reported. Fig. 1.3illustrates a typical structure for electric vehicles, where a high-voltage fuel cell isdirectly connected to the high-voltage bus (around 300 V) [10]. A bidirectionaldc-dc converter is used, providing an interface between the low-voltage batteries(normally 12 V) and the high-voltage bus. The batteries are charged or dischargedduring the transients (e.g., acceleration and regenerative braking) through thebidirectional converter. The batteries also provide energy for a cold start.

1.2. System structure 7
Fuel
cell
Batteries
Inverter
Inverter
Fuel cell
compressor
motor
Traction
motor
drive
High-voltage bus (300 V)
Low-voltage
battery (12 V)
Bidirectional
dc-dc
converter
Figure 1.3: System structure of a fuel cell vehicle [10].
Source 1
Multiport
bidirectional
dc-dc
converter
Source 2
Storage 1
Regulated
dc
outputs
Storage 2
Figure 1.4: Multiport system structure.
1.2.2 Multiport structure
The multiport structure is emerging as an alternative for small generation systems,where there is often more than one power input. The whole power processing unitmay be viewed as a single power stage. In a “black box” fashion, a multiport dc-dc converter (shown in Fig. 1.4) can be used to interface multiple power sourcesand storage devices. It regulates the system voltages and manages the power flowbetween the sources and the storage elements. The control of the entire systemcan be centralized in a single processor. A multiport converter may best satisfyintegrated power conversion, efficient thermal management, compact packaging,and centralized control requirements.
In small generation systems a power electronic converter is needed to providean interface between power sources and storage, to supply local ac loads andpossibly dc loads with regulated outputs, as well as to connect to the utility grid.For instance, Fig. 1.5 shows a possible fuel cell system for domestic applicationbased on the multiport structure. A bidirectional converter manages the powerflow between the fuel cell generator, storage, and load. The whole system is ableto operate in both stand-alone and grid-connected modes. In case of stand-alone

8 Chapter 1. Introduction
Power flow
Inverter
Local
dc loads
Fuel cell
Local
ac loads
Grid
Multiport
bidirectional
dc-dc
converterStorage
Figure 1.5: Small fuel cell generation system based on the multiport structure.
operation, the storage is used to match load transients. In case of grid-connectedoperation, the auxiliary energy source is needed for correct start-up and otherfunctionalities.
1.3 Literature overview
Power electronics is one of the key factors enabling sustainable energy technolo-gies [11]. Various power circuits have recently been investigated in an attempt toexplore reliable, highly efficient, high power density, and low-cost power process-ing systems for alternative energy generation. The converter topologies reportedin the literature can be roughly classified into bidirectional converters and unidi-rectional converters. For interfacing storage devices bidirectional converters areneeded, whereas for interfacing primary sources unidirectional converter topologiesshould be investigated. A new class of converters – multiport converters – whichenable integrated multisource power conversion is emerging from recent researchwork. Although this study will focus on the multiport converter topologies, anoverview of typical two-port (i.e., single-input single-output) converters developedfor fuel cell systems and suchlike will be given as well.
1.3.1 Bidirectional dc-dc converters
Bidirectional dc-dc converters can transfer power between two dc sources in ei-ther direction. They are essential in high-performance storage-backed generationsystems.
Two-quadrant buck/boost
A bidirectional dc-dc converter can be as simple as a two-quadrant buck/boostconverter (shown in Fig. 1.6(a)), which may fulfill the requirements for interfacingenergy storage with a fuel cell system [12], [13], [14], [15]. The converter allowsbidirectional power flow and can achieve high efficiency because of low parts countand lack of a transformer. Furthermore, low parts count allows for compact packag-ing and competitive pricing. This type of circuit can be extended to an interleaved

1.3. Literature overview 9
(a) (b)
+ +
+V2
V1 V1
+
V2
Power flow Power flow
Figure 1.6: Basic bidirectional topology: (a) the two-quadrant buck/boost converter(b) polyphase interleaved topology.
structure [16], as shown in Fig. 1.6(b), in order to reduce the ripple current. Thisis beneficial for both fuel cells and batteries. The interleaved converter has theadvantage of interleaved operation for both boost and buck modes, small passivecomponents and less ripple current. Moreover, it is also possible to integrate theinductors on one magnetic core [17].
Boost full-bridge
In many situations, a large voltage transfer ratio and electrical isolation are re-quired when incorporating storage into a generation system. This often leads to aconverter topology with a high-frequency transformer. In the category of isolatedbidirectional dc-dc converters, several full-bridge derived converter topologies havebeen proposed in the literature, with the aim to reduce switching loss, minimizeelectro-magnetic interference (EMI), and increase efficiency [18], [19], [20], [21].The full-bridge boost converter (shown in Fig. 1.7) is widely investigated and con-sidered as one of the best choices. The properties of this topology are current-fedfrom the low voltage side, simple voltage clamp circuit implementation, a simpletransformer winding structure and low turns ratio, and high choke ripple frequency(twice the switching frequency).
The full-bridge boost converter can achieve high efficiency because the activeclamp circuit provides lossless snubbing, soft-switching operation, and synchro-nous rectification when in charging mode. Furthermore, switching devices can beparalleled at the low-voltage side. On the other hand, in order to avoid largevoltage spikes on the input bridge the converter needs an active clamping circuit.This circuit also has a start-up problem. This can be overcome by adding a flybackwinding [19].
Half-bridge and push-pull
By replacing the diodes of the secondary rectifier stage in some unidirectionaltopologies, bidirectional power flow can be achieved. Fig. 1.8 shows an exam-ple [22]. The converter is a combination of a half-bridge (on the primary side) and

10 Chapter 1. Introduction
LS
+
LB
Act
ive
clam
p
LS: Leakage inductance
LB: Boost inductor
Power flow
+V1 V2
Full-bridgeFull-bridge
Low-voltage High-voltage
Figure 1.7: Full-bridge boost bidirectional converter [18].
LS
+
Power flow
Lo
+
NP1
NP
NS
NS
V1
V2
Balancing
winding
and
catching
diodes
Half-bridge Push-pull
Figure 1.8: Half-bridge and push-pull bidirectional converter [22].
a current-fed push-pull topology (on the secondary side). It enables charging anddischarging by utilizing the bidirectional power transfer property of MOSFETs.The topology’s advantages are low stresses on the switches, galvanic isolation, lowripple in the battery charging/discharging current, and a minimal number of activeswitches [22]. However, the converter is intended for low-power applications.
Dual-active-bridge
The dual-active-bridge (DAB) dc-dc converter (shown in Fig. 1.9) is a promisingtopology for bidirectional applications. The DAB converter was proposed in [23],followed by a detailed investigation in [24] and a series of improvements such asimproving the switching conditions [25], [26], [27] and reducing the circulatingreactive power [28], [29]. It is also possible to use other switching bridge cellsdifferent from a full-bridge [30]. The DAB converter uses phase shifting to controlthe power flow through a high-frequency transformer. It has been proposed forhigh power density and high-efficiency dc-dc converting applications. The DABconverter has a number of attractive features such as bidirectional power flow, lowdevice stresses, small filter components, low switching losses, buck-boost operation,and the utilization of the transformer leakage inductance.

1.3. Literature overview 11
L
Power flow
+V2
+V1
Phase-shifted
Full-bridge Full-bridge
Figure 1.9: Dual-active-bridge (DAB) bidirectional converter [23].
L
+
400V
battery
backup
Phase A
Phase B
Neutral
120/240V,
60Hz
Fuel
cell
+
Full-bridge Half-bridge
(voltage doubler)
PWM inverter
High-voltage bus
Figure 1.10: Low-cost power conditioning system for a fuel cell system based on theDAB topology [31].
Based on the DAB topology, a low-cost 10 kW converter system was presentedin [31]. However, the bidirectional property of the topology is not utilized becausethe converter is used to connect a fuel cell. As shown in Fig. 1.10, the proposedsystem consists of a DAB converter to boost the fuel cell voltage to 400 V dc and apulse-width modulated inverter to convert the dc voltage to two split-phase 120 Vac lines (the US standard). The converter has a full-bridge at the low-voltage sideand a voltage doubler at the high-voltage side. High-voltage batteries are directlyconnected to the high-voltage bus. Compared with the existing fuel cell convertersystems, this circuit promises low cost, lower component count, smaller size, andreduced dc-dc converter peak current. An interesting feature of this topology isthe dual function (voltage doubler and neutral phase leg) provided by the firstphase leg at the inverter side.
Boost dual-half-bridge
A newly developed zero-voltage switching (ZVS) bidirectional dc-dc converter wasproposed in [10] and [32] for interfacing batteries to a fuel cell generator. The de-scribed topology (shown in Fig. 1.11) may be named boost dual-half-bridge (DHB).

12 Chapter 1. Introduction
Power flow
+V2
+V1
Phase-shifted
Boost half-bridge Half-bridge
Low-voltage High-voltage
Figure 1.11: Boost dual-half-bridge (DHB) bidirectional converter [32].
Similar to the DAB converter, in this topology the power flow through the trans-former is controlled by phase-shifting the primary and secondary bridges. Theadvantages of this converter are simple circuit topology and soft-switching im-plementation without additional devices. These advantages make the converterpromising for applications such as auxiliary power supply in fuel cell vehicles.However, the half-bridge structure (the capacitors) at the low-voltage side needsspecial design considerations because of high current.
1.3.2 Unidirectional dc-dc converters
Because most primary sources like fuel cells cannot sink power, the interfacingconverter does not need to be bidirectional. Several unidirectional converters thatare suitable for fuel cells were reported in the literature.
Push-pull
For some low-cost applications, the push-pull topology is adopted to connect afuel cell [33], [34], [35] or to provide an interface between a low-voltage bus anda high-voltage bus [36]. Storage devices like batteries and supercapacitors canbe connected to the high-voltage bus directly. This configuration significantlysimplifies the converter design.
The power processing system illustrated in Fig. 1.12 consists of a push-pullconverter boosting the fuel cell voltage (48 V) to the high bus voltage (200 V)and an inverter to produce 120 V / 240 V, 60 Hz ac outputs. Two sets of lead-acid batteries are connected to the high-voltage dc bus to supply transient loaddemands. Efficient and smooth control of the power drawn from the fuel cell andthe batteries is achieved by controlling the front-end dc-dc converter in currentmode. However, this topology requires high-voltage batteries. For a push-pullconverter it is difficult to equalize or symmetrically wind the two halves of acenter-tapped winding. Furthermore, the power switch on/off times as well astheir forward voltage drops are never exactly equal. These irregularities couldcontribute to transformer saturation and may result in converter failures, andshould therefore be taken care of when using the push-pull topology.

1.3. Literature overview 13
Fuel
cell
+
Phase A
Phase B
Nuetral
120/240V, 60Hz
PWM inverter
+
High-voltage
battery backupVoltage-fed push-pull
+
Figure 1.12: Voltage-fed push-pull converter for a fuel cell system [33].
Fuel
cell
+
Current-fed push-pull
PWM
inverter
High-voltage bus
Snubber circuit
Figure 1.13: Current-fed push-pull converter for a fuel cell system [37].
The dual of the voltage-fed topology, the current-fed push-pull topology shownin Fig. 1.13 was also reported [37]. In principle, the current-fed push-pull converteris basically a boost converter with electrical isolation. This topology suffers fromhigh voltage spikes at the switching instants. A voltage clamp snubber circuit (asshown in Fig. 1.13) is therefore needed to protect the MOSFETs from over-voltagedue to the leakage inductance of the transformer. In addition, a smooth startupprocedure should be provided in order to limit the inrush current during startup.
Phase-shifted full-bridge
The well-known ZVS phase-shifted full-bridge (FB) dc-dc converter (Fig. 1.14(a))can certainly be used to interface to a fuel cell, especially for high-power appli-cations [38]. However, full ZVS operation can only be achieved in a limited loadand input-voltage range. The duty cycle loss resulting from the leakage induc-tance is also a drawback of the circuit. Several techniques have been proposedto extend the ZVS operating range of the converter. An interesting improvementwas proposed in [39], as shown in Fig. 1.14(b). The ZVS of the primary switchesis achieved by employing two magnetic components whose volt-second productschange in opposite directions with a change of phase shift between the two bridge

14 Chapter 1. Introduction
+Vin
Full-bridge
LS
NP
NS
NS
Vo
CB
+Vin
Full-bridge
NP
NS
NS
Vo
CB1 CB2
NC NC
(a) (b)
Coupled
inductor
Figure 1.14: Phase-shifted full-bridge converter, showing (a) the topology [38] and (b)its improvement [39].
High-voltage bus
Active clamp
LS
+Vin
Vo
Figure 1.15: Active clamp current-fed half-bridge dc-dc converter [40].
legs. One magnetic component is the transformer while the other magnetic compo-nent is either a coupled inductor (shown in Fig. 1.14) or a single-winding inductor.The transformer is used to provide isolated output(s) and the inductor is used tostore energy for ZVS. With this technique, ZVS of all the switches over a widerange of the input voltage and output load can be achieved with a minimal dutycycle loss and minimal circulating current.
An active-clamping current-fed half-bridge topology designed for fuel cell sys-tems (as shown in Fig. 1.15) was presented in [40]. This topology is also an isolatedboost converter. It realizes a current source function and therefore is friendly tofuel cells. However, like other isolated boost topologies, the switching conditionsfor the power switches are poor and active-clamp circuits are necessary.

1.3. Literature overview 15
+
Vin
Vo
Figure 1.16: High-power three-phase six-leg converter [42].
Polyphase interleaving
For high-power applications, polyphase interleaving technique has been appliedto the phase-shifted full-bridge topology [41], [42]. The resulting converter showsa three-phase six-leg circuit topology as illustrated in Fig. 1.16. Owing to theinterleaving, this converter significantly reduces the ripple current. A disadvantageis that it suffers from high parts count.
Multicell topology
The multicell technique has been used in [43] to improve the efficiency and reducethe filter size. As shown in Fig. 1.17, several dc-dc isolation stages are connected inparallel at the dc input of the system and operate in high-frequency resonant mode.Each dc-dc isolation stage supplies a full-bridge inverter stage. Series connectionof the full-bridge inverter stages forms the overall ac output of the system [43].Because of the cascaded connection, low-voltage high-current power MOSFETs canbe used for all switching cells. This results in a higher efficiency compared withconventional isolated dc-dc converters. Similar to cascaded multilevel inverters,the full-bridge cells are operated in an interleaved pulse-width modulation (PWM)mode. Such operation can significantly reduce the size of the ac output filter [43].However, this multicell topology requires complicated control and a large numberof fully isolated gate drivers.
The multicell (multilevel) technique was also reported in [44], where it is usedto avoid derating of semiconductors by a voltage reduction control through the useof a multilevel dc-dc converter. Voltage reduction is done by inhibiting a certainnumber of single fuel cells in the stack when the load current decreases, therebyreducing the overall system operating voltage variation. However, a complicatedcontrol system must be designed.
1.3.3 Multiport dc-dc converters
Multiport converters, a promising concept for alternative energy systems, haveattracted increasing research interest recently. The use of a single power process-

16 Chapter 1. Introduction
+Vin
230V ac
output
Resonant-mode
dc-dc stage
PWM inverter
Figure 1.17: Multicell dc-ac converter based on high-frequency resonant-mode dc-dcisolation stages feeding interleaved PWM-mode MOSFET dc-ac cells con-nected in series on the ac output [43].
ing stage to interface and control multiple power ports implies centralized andintegrated power conversion from a variety of power sources.
Thus far, limited work on multiport topologies has been reported. Multi-port converters have also been referred to as multiple-input (MI), multiple-output(MO), or multiple-input multiple-output (MIMO) converters depending on theinput and output configuration of the system.
This section gives an overview of typical multiport topologies reported in theliterature. Some of them have the property of bidirectional power flow for one ormore ports, while others are unidirectional. A variety of methods have been usedto extend a conventional two-port converter to a multiport converter.
Time-sharing concept
MI flyback converter The time-sharing concept can be used to develop multiportconverters. As shown in Fig. 1.18(a), the two-input flyback converter proposedin [45], [46], and [47] uses the coupling of a magnetic component to enable multiple-input. For each input there is a separate winding. To some extent, the convertercan be regarded as two flyback converters operating in parallel, except for thecombined transformer on one core and the shared secondary output rectifier. It isalso possible to have multiple outputs by using multiple secondary windings andrectifiers to provide multiple isolated output voltage levels for different loads, asshown in Fig. 1.18(b). This topology is capable of interfacing sources of differentvoltage-current characteristics to a common load, while achieving low parts count.Similarly, it is also possible to use the forward topology to develop a multiportconverter [47].
In the application example discussed in [47], the two inputs are from a solarpanel and a rectified utility power. With the two inputs, the output voltage can

1.3. Literature overview 17
+
Two-input flyback
+
Vo
+Vin1
+
Vo1
Vo2+
MIMO flyback
S1
S2
Ton2Ton1 Toff
S2
S1
Gate control signals
(a)
(b)(c)
T Switching cycle
Vin2
VinN
Vin1
Vin2
Figure 1.18: Multiport converter using the flyback topology, showing (a) two-inputflyback converter, (b) MIMO flyback converter, and (c) typical gatingsignals for the two-input flyback converter [47].
be well-regulated, notwithstanding the erratic nature of the power input from thesolar cells. It is possible to implement maximum power point tracking and powerfactor correction [46]. The control scheme for this converter is based on the time-sharing concept. The duty cycle within one switching cycle is split up for themultiple inputs, that is, each input is active for a certain period in a switchingcycle. The typical gating signals for the two-input flyback converter are shown inFig. 1.18(c). During Ton1, source V1 transfers power to the load, whereas duringTon2, V2 does.
The idea behind the time-sharing concept is simple. However, this methoddoes not allow for a simultaneous energy transfer from the multiple inputs. Theflyback topology implies that it is only suitable for low-power applications becauseof high current stresses. The input and output currents are both pulsating. Thisincreases the filtering effort. Furthermore, the converter is unidirectional.
The topology presented in [48] (shown in Fig. 1.19(a)) is based on a similaridea. The concept of time-sharing is implemented on a larger time scale, thatis, each port operates in an intermittent mode. A typical time-sharing switchinginterval is shown in Fig. 1.19(b). The converter can realize bidirectional power flowon one port through the use of an extra winding. A relay is used to switch betweenthe two windings according to the direction of the power flow. This, however, isnot a truly bidirectional port.
MI buck-boost converter A multiple-input buck-boost (MIBB) converter topol-ogy was introduced in [49] and further investigated in [50]. The circuit is shownin Fig 1.20(a). The multiple inputs are interfaced through a forward-conducting,bidirectional-blocking switch. The switch can be equipped with a gate turn-off

18 Chapter 1. Introduction
+
+
VoS1
S2
S2
S1
Gate control signals
(a) (b)
Switching intervalVin1
Vin2
+
StorageS3
Relay
Vin1 delivers
power
Vin2 delivers
power
Figure 1.19: Multiport converter based on the time-sharing concept, showing (a) topol-ogy and (b) typical gating signals [48].
+
Two-input buck-boost
+ Vo
+
VinN
Vo1
Vo2
MIMO flyback converter
with single primary winding
S2
S1
D2TS2
S1
Gate control signals
(a)
(b)
(c)
T
Vin2Vin1
+
Vin2
+
Vin1D1T
S2eff
S1eff
when Vin1 > Vin2
Effective duty cyclesD1effT
D2effT
Switching cycle
Figure 1.20: (a) MI buck-boost converter, (b) MIMO flyback converter, and (c) gatecontrol signals [49].
(GTO) thyristor, a series MOSFET and diode pair, or several other switch com-binations. The inputs share a common inductor and the output capacitor. It ispossible to provide isolation by replacing the single-winding inductor in Fig 1.20(a)with a coupled double-winding inductor. Then, the circuit actually becomes a MIflyback converter. It is possible to have multiple outputs by adding more secondarywindings as shown in Fig 1.20(b).
The converter has low parts count of both passive and semiconductor compo-nents, and provides either a buck or boost mode. Contrary from the MI flybackconverter in Fig. 1.18, multiple primary windings are removed in this topology; itonly needs one primary winding. An advantage of this scheme is that the inductoris shared by all the inputs. This is indeed a significant improvement in cost, massand converter size, however, at the cost of losing isolation among inputs and the

1.3. Literature overview 19
ability of matching substantially different input voltage magnitudes.The gate control signals for the switches have the same rising edge, but the
falling edges do not coincide, as illustrated in Fig 1.20(c) [49]. Each switch hasa different duty cycle. In this topology, only one input switch or output diode isconducting at any time. If the number of the switches turned on is more than one,the source that has the highest voltage level will supply the power to the load.Hence, only one of these dc sources is allowed to transfer energy to the load at atime. Depending on the magnitudes of the input voltages, the effective duty cycleof each switch can be calculated [49].
This circuit configuration, as shown, allows for only unidirectional power flow.For sources such as solar cells and fuel cells, this is sufficient. For bidirectionalpower flow, as suggested in [49], the output voltage may serve as the input toanother converter, or it can be fed back to one of the sources. In that way, abidirectional MIMO converter can be constructed.
In short, these time-sharing based multiport topologies promise low cost andeasy implementation. However, a common drawback is that power from multipleinputs cannot be transferred simultaneously to the load.
Dc-link coupling
Using a dc bus to link several switching cells is another way to enable multiple-source power conversion [12]. The dc-link method here refers to connecting multi-ple converter cells at a dc bus buffer capacitor and controlling the switching cellscentrally.
As shown in Fig. 1.21, several power sources can be linked together throughindividual buck/boost bidirectional switching cells and a dc-link capacitor. For aunidirectional input, one of the two power switches can be replaced by a diode.
In the described automotive application [12], the power inputs include a fuelcell, a supercapacitor, and batteries. The dc bus buffer capacitor is charged bythe input sources while it supplies power to the inverter stages. This convertertopology resembles the interleaved boost converter except that the inputs areconnected to different sources instead of a single one. Current-mode or voltage-mode control may be applied to regulate input source currents and the dc-linkvoltage. The advantages of this topology include bidirectional power flow andpossible use of standard inverter phase leg modules. The drawback, however, isthat this topology cannot efficiently handle a wide variety of input voltages.
Magnetic-coupling
The use of magnetic-coupling method through a multiwinding transformer makesit possible to connect sources having substantially different operating voltages.The magnetic-coupling method here refers to isolated high-frequency (HF) linkingof multiple power inputs/outputs. Power flow control can be achieved by phase-shifting the high-frequency voltages (commonly being square-waves) presented tothe windings. With magnetic-coupling, all the sources and loads are galvanicallyisolated.

20 Chapter 1. Introduction
+
Vo
VinNVin2
++
Vin1
dc-link
Figure 1.21: Dc-link coupling MI buck/boost bidirectional converter [12].
+
+
+
V2
V1
V3
Power flow
Full-bridge
Full-bridge
Full-bridge
Figure 1.22: Magnetic-coupling three-port bidirectional converter [51].
Using this method, a three-port converter (shown in Fig. 1.22) was proposedin [51] for a fuel cell and battery system. It was also recommended in [52] for an un-interruptible power supply (UPS). Each bride generates a high-frequency voltagewith a controlled phase-angle. The transformer leakage inductances are used asenergy transfer elements. This topology is suitable for medium-power applications(a few kilowatts) and has attractive features such as simultaneous power transferfrom any input to any output, possible soft-switched operation, galvanic isolation,capability of matching different voltage levels, bidirectional power flow, and cen-tralized control. Disadvantages are the high parts count and limited soft-switchedregion when operating with wide input voltage ranges.
In a recently published work [53], a three-port converter having two current-fed ports is used to interface with multiple energy storage elements (batteries plussupercapacitors). The converter, pictured in Fig. 1.23, shows a similar topologyto that of Fig. 1.22. It features two current-fed ports by use of two boost half-bridges for the two inputs. The current-fed property of the input ports is suitable

1.3. Literature overview 21
+
+V3
V1
Power flow
+V2
High-voltage
Low-voltage
Low-voltage
Current-fed
Current-fed
Boost half-bridge
Half-bridge
Boost half-bridge
Figure 1.23: Magnetic-coupling three-port bidirectional converter with two current-fedports [53].
for interfacing to fuel cells and batteries. However, this converter has a limitedsoft-switching operating region when the port dc voltages vary widely.
Flux additivity
A MI converter based on flux additivity was proposed in [54]. Fig. 1.24 showsthe converter topology. It has two power inputs and one output. Instead ofcombining input dc sources in electric form, the proposed converter combines in-puts in magnetic form by adding up the produced magnetic fluxes together in themagnetic core of the coupled transformer. With phase-shifted PWM control, theproposed converter can draw power from two different dc sources and deliver it tothe load individually and simultaneously, and output voltage regulation and powerflow control can be achieved. Due to the current-fed structure of the converter,the converter has the ability to accommodate voltage variations of the sources.However, this topology is not bidirectional. Although soft-switching is achievable,the current stress of the switches is high. Therefore, its application is limited tomedium-/low-power applications.
Connecting in series
Different dc sources can be connected in series through a converter stage to im-plement a MI converter, as shown in Fig. 1.25 [55]. This two-input converter isformed by a series connection of two ordinary boost converter stages. Duringnormal operation, the output voltage can be regulated. However, if one of thedc sources drops away, it will be difficult to obtain the regulated output. The

22 Chapter 1. Introduction
+
Vin1
+
Vin2
Vo
Figure 1.24: MI dc-dc converter based on flux additivity [54].
Vin1
Vin2
+
+
Vo
Figure 1.25: MI converter by connecting two converter stages in series [55].
converter was proposed for small integrated wind and photovoltaic electricity gen-eration systems. The implementation of the converter is straightforward and isdemonstrated in [56]. However, there are obvious limitations in this convertertopology. For example, it does not support bidirectional power flow.

1.3. Literature overview 23
Vo
+
Vin2
+
Vin1
Figure 1.26: MI converter based on a modified boost converter using three switches [57].
Three-switch boost
New ideas for MI converters are being investigated recently. A novel three-switchboost converter topology has been proposed in [57]. As shown in Fig. 1.26, thetopology only needs three power switches, while providing bidirectional interfacingof two dc voltage sources with a dc-link. For the operation of the converter, thesum of the two dc voltages must be lower (or equal) than the dc-link voltage.Although the topology has a low power semiconductor count, it does not provideelectrical isolation.
Tri-modal operation
Very recently, a new three-port topology has been reported in [58]. A so-calledtri-modal half-bridge converter based on an isolated half-bridge converter topologywas presented. The idea comes from the similarity between the half-bridge and theactive-clamp forward converter topologies. As shown in Fig. 1.27(a), the proposedconverter is formed by adding a free-wheeling branch (a diode and a transistor)across the primary winding of an ordinary half-bridge topology. The two powerinputs are connected to the half-bridge and the active-clamp input. The gatingsignals are illustrated in Fig. 1.27(b). With the free-wheeling stage, the convertercan utilize three modes of operation within a fixed-frequency switching cycle toprovide two independent control variables, thereby allowing tight regulation oftwo of the three power ports. One of the design assumptions is that there is a dccurrent present in the primary winding of the transformer because of asymmet-ric operation [58]. The topology has low parts count and thus is cost effective.However, the input source current is discontinuous, which implies that it mayonly be suited to low-power applications. Furthermore, the converter has only onebidirectional port and thus does not support a regenerative load.
To sum up, the methods used to provide a multiport interface include thetime-sharing concept, dc-link coupling via a dc bus, magnetic-coupling through ahigh-frequency transformer, using flux additivity by a multiwinding transformer,putting sources in series, based on a modified conventional topology, or tri-modaloperation.

24 Chapter 1. Introduction
+
Vin1
+
Vin1
NS
NS
Vo
Free-wheeling
S3
S1
(b) Gate control signals
T Switching cycle
S2
(a) Tri-modal half-bridge converter
S3
S1
S2
Figure 1.27: Three-port tri-modal half-bridge converter, showing (a) the topology and(b) the gate control signals [58].
Although multiport converters are increasingly finding applications in varioussystems like alternative generation [58], [59], [60], [61], electric vehicles [12], [57],UPS systems [52], [62], and hybrid energy storage systems [53], limited work onthese topologies has been reported.
The existing multiport converter topologies have one or more of the followingdrawbacks: (1) unidirectional, (2) difficult to match different dc voltage levels inthe overall system, (3) no electrical isolation, (4) high current stress, (5) limitedsoft-switching region, (6) high component count, (7) complicated control, (8) onlysuitable for low-power applications, (9) unable to transfer the power from multipleinputs simultaneously to the load.
To date, there is a lack of bidirectional multiport converter topologies that arecapable of providing soft-switching, low current stress, smooth input and outputcurrents, and flexibility in matching a variety of input voltages. Development ofnovel multiport bidirectional converters therefore becomes the main objective ofthis work.
1.4 Overview of the thesis
1.4.1 Motivation and objective
The subject of this research work is relevant because distributed generation isbecoming the preferred method of modern power generation. Our future powersystems will require interconnecting all kinds of energy sources and most power

1.4. Overview of the thesis 25
will be generated at the point of use. We are now experiencing a gradual trans-formation from centralized to distributed generation. Because the electricity isgenerated very near where it is used, distributed generation reduces the loss intransmitting electricity. Furthermore, it provides additional cost-saving cogenera-tion capabilities, allowing the user to utilize the normally wasted exhaust heat.
This thesis addresses the power electronic interface for the integration of sus-tainable energy sources in small distributed generation systems. A fuel cell systemis used as an example in this study. The main objectives of this thesis are
• to explore novel multiport bidirectional converter topologies that are suitedto multisource/storage power conversion;
• to model multiport converters and develop adequate control strategies;
• to improve the converter’s performance by means of novel control methodsto achieve, for example, soft-switching;
• to realize added functionality in small distributed generation (DG) systemsand design a high-performance utility interconnection system;
• to digitally implement and test the small DG system based on the proposedtopologies and control methods.
1.4.2 Outline of the thesis
Both the topological study of the dc-dc converters (Part I) and an investigationof control strategies for grid-interfacing inverters (Part II) are addressed in thisthesis. The work on the dc-dc stage makes up the major part. Fig. 1.28 shows therelationship between the chapters. This thesis is organized as follows.
Chapter 1 outlines the background of the research work by an introductionof typical alternative power generation systems and an overview of the systemstructures and converter topologies proposed in the literature.
Chapter 2 presents a triple-active-bridge (TAB) converter topology for energymanagement in a three-port system where a primary source is combined with anenergy storage element. The topology consists of three active bridges coupledby a three-winding transformer. Both the single- and three-phase versions of thetopology are analyzed. The small signal model of the TAB converter is investigatedand different power flow control strategies are proposed.
Chapter 3 investigates a soft-switching method for the TAB converter. Asimple and effective duty ratio control method is proposed to extend the soft-switching operating range when input voltages vary widely. A dual-PI-loop controlscheme is described to precisely control the power flow. Practical issues suchas the digital signal processor (DSP) control implementation and the design ofthe transformer are also addressed. The closed-loop simulation and experimentalresults of a laboratory prototype are included.
Chapter 4 provides an alternative way of integrating the two power inputs. Atwo-input bidirectional converter is presented that interfaces a primary source andstorage device with a load by a combination of a dc-link and magnetic-coupling.The topology only needs six power switches while supporting bidirectional powerflow for all the power ports. Two control methods, namely variable hysteresis

26 Chapter 1. Introduction
Chapter 1
Chapter 2
Chapter 3
Chapter 5Chapter 4
Chapter 6
Chapter 7
Chapter 8
Chapter 9
Part I Part II
Figure 1.28: Structure of the thesis.
band control and asymmetrical wave control, are proposed in order to achievesoft-switching operation under a variety of operating conditions.
Chapter 5 discusses a further possibility for a three-port interface. The triple-half-bridge (THB) converter topology is presented. Being a derivative of the TABconverter, the converter topology comprises a three-winding transformer and threehalf-bridges, one of which is a boost half-bridge connecting a power port with awide operating voltage. The converter is controlled by phase shift in combinationwith PWM. With the PWM control, both current stress and conduction losses ofthe power switches are reduced, and the ZVS operating range is extended.
Chapter 6 brings all the results of the preceding chapters together and presentsa family of multiport bidirectional converter topologies. A general topology is thensynthesized. Furthermore, several basic bidirectional switching cells are proposed,from which a number of converter topologies can be constructed. Based on theinterleaving technology, solutions for high-power applications are also provided.The idea of using active-bridges coupled by a multiwinding transformer is extendedinto an general multi-active-bridge (MAB) topology. An equivalent cantilevermodel of the transformer significantly simplifies the power flow analysis. Moreover,three operation modes are analyzed in terms of current stress and rms loss.
Chapter 7 focuses on the control of grid-interfacing inverters. A flexible con-trol strategy to operate a small DG system in both stand-alone and grid-connectedmodes is presented. For connecting the system to the utility grid, a high-performancesingle-phase phase locked loop (PLL) that incorporates an orthogonal filter is pre-sented. Resonant controllers for both the voltage and current regulation eliminatesteady-state error and implement selective harmonic compensation.
Chapter 8 covers the design issues of the complete generation system. A line-interactive fuel cell UPS/DG system is proposed and designed. The TAB converteris chosen as the dc-dc stage. An active filtering function is integrated into thesystem. It is shown that a supercapacitor can serve as both an active and areactive energy storage. The control of the whole system is carried out by a single

1.5. Contributions of this work 27
DSP. Practical design issues such as the state-of-charge (SOC) management of thesupercapacitor, generation of high-resolution phase shifts, and prototype designdetails are discussed. Finally, experimental results from a 3.5 kW prototype arepresented to verify the digitally implemented control scheme.
Chapter 9 summarizes the most important results and conclusions of this re-search work. Recommendations for future research work are given.
1.5 Contributions of this work
This thesis investigates novel multiport bidirectional converter topologies for smallenergy management systems, more specifically, methods to combine a primarysource and a storage device by means of a multiport converter. The main con-tribution is the multiport converter concept and topological study of three-portconverters. Original work can be found in the following aspects:
• Triple-active-bridge (TAB) converter (Chapter 2 and 3)
− duty ratio control (keeping the half-cycle volt-seconds of the windingvoltages equal) to operate the TAB converter with ZVS under wideinput ranges (patent issued [63])
− dual-PI-loop control strategy and small signal modeling of the TABconverter
− high-power three-phase TAB topology
• Two-input bidirectional converter (Chapter 4)
− two-input topology that combines a dc-link with magnetic-coupling
− use of variable hysteresis band and asymmetrical wave control for ZVS
− control strategies for power flow management
• Triple-half-bridge (THB) converter (Chapter 5)
− triple-half-bridge topology (two half-bridge plus one boost half-bridge)
− use of phase shift plus PWM control to reduce rms loss and achievesoft-switching
• Analysis of basic bidirectional switching cells and their interleaved topolo-gies and synthesis of the general multiport bidirectional converter topology(Chapter 6)
• High-performance single-phase PLL that uses a transport delay and an or-thogonal filter (Chapter 7)
• Utilization of the supercapacitor storage to minimize the dc-link capacitanceand extension of the functionality of small DG systems (Chapter 8)
• DSP control implementation of small UPS/DG systems, particularly the sin-gle DSP control implementation and the use of high-resolution phase shifting(Chapter 8).

28 Chapter 1. Introduction

Part I
Multiport bidirectional dc-dcconverters
29


Chapter 2
Triple-active-bridge converter
This chapter presents a three-port triple-active-bridge bidirectional dc-dc convertersuitable for sustainable energy systems where a primary source is combined witha storage element to feed a common load. A fuel cell generator will be consideredas the primary source. Since batteries have a relatively constant operating voltagecompared with that of supercapacitors, which could be virtually discharged downto zero voltage, a battery storage is first considered to simplify the converter designand presentation. In this chapter, both the single-phase and three-phase versionof three-port TAB converter topologies will be analyzed in detail. The modelingmethod and control strategies, proved by simulation results under a variety ofoperating conditions, will also be described.
2.1 Introduction
In the past decades, traditional power converter topologies have been evolving invarious directions, for example, from single-phase to multiphase interleaving, andfrom two-level to multilevel. Nowadays, most dc-dc power converters deal withsingle-input and single-output. Recently, attention has been paid to multiport-structure converters, an application of which is a hybrid power system that com-bines a slow energy source with a fast storage to feed a common load. This typeof converters is gaining popularity in sustainable energy generation systems andelectric vehicles, where a multiport interface is necessary since such systems re-quire energy storage to compensate for the mismatch between the sourcing andloading power patterns.
Alternative energy generators like fuel cells have slow dynamics and quite spe-cific dc voltage and current characteristics [6]. Furthermore, energy supplied bysustainable sources such as solar and wind energy has an intermittent nature,which necessitates a battery-type storage capable of long-term energy buffering.Also in microCHP systems, energy storage can be incorporated to optimize theoperation of the system. For electric vehicle applications, transient energy storageis required to cope with the acceleration and braking of vehicles. A three-port
31

32 Chapter 2. Triple-active-bridge converter
Port 1:
Primary
source Port 2:
Load
Three-port
bidirectional
dc-dc
converterPort 3:
StoragePower flow
tt
P3
t
P1 P2
00
0
P1
P3
P2
Figure 2.1: Three-port power management system – the storage smooths the powerflow of the primary source.
energy management system accommodates a primary source and a storage deviceand combines their advantages automatically, while utilizing a single power stageto interface the three power ports. Having the two power inputs, the instantaneouspower can be redistributed in the system in a controlled manner, which improvessystem dynamics and increases reliability. The storage acts as a power filter tosmooth the power flow of the primary source, as illustrated in Fig. 2.1.
A second advantage of using a three-port system is that the primary sourceonly needs to be sized according to the average power consumed by the load,not necessarily to the peak power. Such operation would avoid oversizing of theprimary source and is economically beneficial since per watt cost of the primarysource is usually pretty high, and thus it makes sense to operate the primarysource at its maximum power. Moreover, with the auxiliary storage, not only canthe system dynamics be improved, but also the storage serves as a backup energysource in the event of a main source failure. In this regard, a few attempts havebeen made to explore dc-dc converter topologies suitable for interfacing multiplesources and/or storage elements [46], [49], [53], [58], [60], [61], [64], [65].
In this chapter, a fuel cell generation system is taken as an example to presentthe three-port converter. Fuel cells have a slow dynamic response due to the fuelsupply process and electrochemical reactions, which result in a mismatch of theelectrical output and load power during transients. Therefore, a method for powerdecoupling, for instance, an external leveling device, should be present in a fuel cellsystem. For this purpose a bidirectional energy storage can be used to sink/sourcethe mismatched power. As regards the storage, lead acid batteries, which areinexpensive and widely available, provide a suitable choice for this energy storage.
Presented in the following sections is a fuel cell and battery electricity gener-ation system. The three-port converter is the core of the system, providing theinterface between the source, storage, and load. Some requirements of such a con-verter include, for example, bidirectional power flow, galvanic isolation betweenthe load and the fuel cell, capability to match different voltage levels in the overallsystem, and fast dynamic response to satisfy the transient load demand.

2.2. Dual-active-bridge (DAB) topology 33
Phase-shifted
V1 V2
1 : n
L
ϕ
i1
iP1
v1 v2
Power flow
N1 N2
iP2
Figure 2.2: Circuit diagram of the dual-active-bridge (DAB) converter.
2.2 Dual-active-bridge (DAB) topology
Before discussing the three-port topology, let us first review the dual-active-bridge(DAB) dc-dc converter topology (shown in Fig. 2.2) briefly. This two-port topol-ogy has been proposed in [23]. It has attractive features such as low switchinglosses and optional bidirectional power flow. In the DAB converter each bridgegenerates a square-wave voltage and applies it to the corresponding transformerwinding. The two square-wave voltages, v1 and v2, are phase-shifted with respectto each other, causing a certain amount of power flow through the inductor Lwhich represents the sum of the primary-referred transformer leakage inductanceand possible external bulk inductors. This circuit allows a fixed frequency op-eration and utilization of the leakage inductance of the transformer as the mainenergy transfer element.
We can define the dc conversion ratio (or call it primary-referred dc voltagegain [23]) of the converter as
d =V2
nV1, (2.1)
where n = N2/N1 is the transformer turns ratio, N1 and N2 being the numbersof turns of the primary and secondary windings, respectively; V1 and V2 are thedc voltages at the ports, also being the amplitudes of the two square-waves (for afull-bridge circuit). Full control range under soft switching is achievable for d = 1,which is the optimal operating condition for the DAB converter [24]. The idealizedoperating waveforms of the converter at d = 1 is illustrated in Fig. 2.3.
In a lossless idealized circuit the power flow in the system is derived as
P =V1V2
nωLϕ
(1 − |ϕ|
π
), (2.2)
where ϕ, as defined in Fig. 2.3, denotes the phase shift (in radians), and ω = 2πfs
(fs is the switching frequency). The maximum power flow occurs at ϕ = π/2(shown in Fig. 2.4). Although a phase shift greater than π/2 (|ϕ| > π/2, thedotted lines in Fig. 2.4) is operational, the operating phase shift is usually boundas |ϕ| ≤ π/2 to avoid excessive reactive power in the region of |ϕ| > π/2. The

34 Chapter 2. Triple-active-bridge converter
v1
v2
ϕ
tωi1
V1
V2''
tω
tω
Figure 2.3: Idealized operating waveforms of the DAB converter (d = 1, ϕ > 0).
-1 -0.5 0 0.5 1
Pow
er f
low
(p.u
.)
Operating region
Excessive reactive
power region
/ϕ π
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Excessive reactive
power region
Figure 2.4: Power flow (in p.u.) versus phase shift in the DAB converter (d = 1).
power flow in the figure is expressed in per unit (p.u.) with the base defined as
PB =V 2
1
ωL. (2.3)
2.3 Triple-active-bridge (TAB) topology
Fig. 2.5 shows a three-port converter topology [51], [52]. This circuit is an exten-sion of the DAB topology and is named the triple-active-bridge (TAB) converter inthe following. The TAB converter matches the aforementioned requirements of thesystem in Fig. 2.1 by means of a three-winding transformer and high-frequencyswitching bridges. Shown at the ports are full-bridge modules coupled throughthe high-frequency transformer1. Each bridge is switched at a fixed frequency
1It is also possible to implement this converter by using half-bridges.

2.3. Triple-active-bridge (TAB) topology 35
L1
L2
L3
v3
v2
v1
CL RL
i1
i2
i3Battery
LoadiFC
iLoad
Fuel
cell
+
+
iBT
iP1
Port 1
Port 2
Port 3
VFC
VLoad
VBT
iP2
iP3
P1
P2
P3
Power flow
N2
N1
N3
PFC
PBT
PLoad
PFC = P1
PLoad = -P2
PBT = P3
Figure 2.5: Three-port triple-active-bridge (TAB) converter.
and generates a square-wave voltage (v1, v2, and v3) having a controlled phasedisplacement with reference to the primary side (v1). The phase shifts result in apower flow between the three ports. The maximum power flow at a given switch-ing frequency is directly related to the inductances (L1, L2, and L3) shown in thefigure. These are leakage inductances of the transformer, possibly increased byexternal inductors. The topology is bidirectional due to the active bridges at allthe ports. In addition to galvanic isolation, a major advantage of this converteris the ease of matching the different voltage levels at the ports by choosing theappropriate numbers of turns for the windings. The resulting leakage inductances,acting as energy transfer elements, are an integral part of the circuit.
Fig. 2.6 shows the fundamental system model with the bridges replaced bythree square-wave voltage sources. The sources exchange energy through a grid ofinductors. The voltages v
′
2 and v′
3 are shifted by ϕ12 and ϕ13 with reference to v1,respectively. The phase shift is positive when the voltage lags the reference andnegative when it leads the reference. The network of inductors is derived from thetransformer and inductors in Fig. 2.5 based on a ∆-model representation of thesystem [51]. Using the ∆-model representation, the three-port system is decom-posed into three two-port subsystems. The ∆-model facilitates the system analysisand simple equations allow converting the parameters between the conventionalT-model and the ∆-model [51]. The magnetizing inductance, which does not con-tribute to the power flow, is neglected to simplify the analysis and therefore is notshown in the figure. Appendix A provides the equations for parameter conversionbetween the two models.
To illustrate the operation of the TAB converter, Fig. 2.7 shows the idealizedsteady-state operating waveforms. All the voltages are referred to the primary andhave an equal amplitude. This is the optimal operating condition. Based on the

36 Chapter 2. Triple-active-bridge converter
L12
L31 L23
i12 , P12
i31, P
31
i1 , P1 i2 , P2
i3, P3
v1
v3
v2
tω
tω
tω
v2
v3
v1
12ϕ
13ϕ
i 23, P 23
2π
V1
V2
V3
'
'
'
'
'
'
''
Figure 2.6: Simplified ∆-model equivalent circuit of the TAB converter (the magnetiz-ing inductance is neglected).
v1
v2
i1
i2
i3
v3
13 120.5ϕ ϕ=
12ϕ
13ϕ
tω
V1
V2
V3
'
'
'
'
'
'
Figure 2.7: Idealized operating waveforms of the TAB converter of Fig. 2.5 in the casethat the voltages v1, v
′
2, and v′
3 are equal in amplitude, L12 = L23 = L31,and ϕ13 = 0.5 ϕ12 > 0.
model in Fig. 2.6, for given voltages the current through each inductor branch isdetermined, and so is the current at each port. Note that the current waveformsvary with the operating point.
2.4 System power flow modeling
As already mentioned, the circuit in Fig. 2.6 can be viewed as a network of in-ductors driven by voltage sources which are phase-shifted from each other by

2.4. System power flow modeling 37
controlled angles. According to the definitions in the ∆-model of Fig. 2.6, whereall the quantities are referred to the primary, the relationship between the phaseshift angles and power flow in the system is found to be [51]
P12 =V1V2
n2ωL12ϕ12
(1 − |ϕ12|
π
),
P23 =V2V3
n2n3ωL23(ϕ13 − ϕ12)
(1 − |ϕ13 − ϕ12|
π
),
P31 = − V3V1
n3ωL31ϕ13
(1 − |ϕ13|
π
),
(2.4)
where V1 = VFC , V2 = VLoad, and V3 = VBT are the dc voltages at the ports (forthe full-bride circuits shown in Fig. 2.5, V1, V2, and V3 are also the amplitudesof the square-wave voltages v1, v2, and v3, respectively); ϕ12 and ϕ13 denote thephase shifts (in radians); n2 and n3 are the equivalent turns ratios in the ∆-model(see Appendix A)2. The above equations suggest that the power flow in the systemcan be controlled either by the phase shifts or switching frequency. Two degreesof freedom are necessary to control the power flow in the system. Considering thetransformer size, a fixed switching frequency operation is preferred. Therefore,the two phase shifts are chosen to control the power flow. In view of (2.4), themaximum power flow through each inductor occurs at π/2 and the absolute valueof the phase shifts shall be bound as
|ϕ12| π/2 and |ϕ13| π/2. (2.5)
With the ∆-model in Fig. 2.6, the power flow at each port is a combinationof the power flows through two associated branches (inductors). For a losslesssystem, they are
P1 = P12 − P31,
P2 = P23 − P12,
P3 = P31 − P23,
P1 + P2 + P3 = 0,
(2.6)
where P1 = PFC is the power delivered by port 1 (the source port), P2 = −PLoad
is the power supplied by port 2 (the load port) (a negative sign of P2 means theload consumes energy), and P3 = PBT is the power taken from port 3 (the storageport) (a negative sign of P3 implies that energy is stored into the battery). Thereference directions of the power flows are indicated in Fig. 2.53. Note that P3 isredundant because P3 = −P1 − P2.
If the system is symmetrical, that is, all the inductances are equal when referredto the primary (L12 = L23 = L31), then the power rating of each port is identical.
2If the magnetizing inductance is neglected, the turns ratios remain unchanged when trans-forming form the T-model to the ∆-model.
3When using a symbol for power flow with a numerical subscript like in P1, P2, P3, etc., thereference direction of power flow is always into the converter, as shown in Fig. 2.5. This conventionis adopted throughout the thesis. When using a symbol with an alphabetical subscript like inPFC , PLoad, PBT , etc., the sign of power flow will be given in the context. In this example, wehave PFC = P1, PLoad = −P2, and PBT = P3.

38 Chapter 2. Triple-active-bridge converter
PI
Limiter
V2 (VLoad)
ϕ12
ϕ13
+
-
Calculation
P1 (PFC)* *
V1 (VFC)
V2 (VLoad)
V3 (VBT)
V2 (VLoad)* *
Figure 2.8: PI and feedforward control scheme for the fuel cell and battery generationsystem.
For the situation that the average power of the storage port over one switchingcycle is zero, the phase shifts should obey ϕ13 = 0.5ϕ12 (this is the case shown inFig. 2.7). The maximum power flow to the load port occurs when ϕ12 = π/2 andϕ13 = 0.
2.5 Control strategies for the TAB converter
2.5.1 PI and feedforward control
A three-port system implies multiple control objectives. In the studied case thecontrol scheme aims to regulate the output voltage V2 and the fuel cell powerP1 simultaneously. This strategy allows the load voltage to be tightly regulated,at the same time preventing load transients from affecting the operation of theprimary source.
Based on the analysis of the power flow, several control strategies can be real-ized. Fig. 2.8 illustrates the PI and feedforward control strategy [51]. Commonly,the main control objective is to guarantee a well regulated output voltage. Forthis purpose, ϕ12 is controlled by a compensator, e.g., a proportional integral (PI)regulator that keeps the load port dc voltage V2 constant. Consequently, the phaseshift ϕ12 forces the power flow:
P12 =V1V2
n2ωL12ϕ12
(1 − |ϕ12|
π
). (2.7)
Now let P ∗1 denotes the desired power to be delivered by the fuel cell generator.
Then, the phase shift to be adjusted for the battery side bridge should obey
ϕ13
(1 − |ϕ13|
π
)= Γ, (2.8)
where
Γ =n3ωL31
V1V3(P ∗
1 − P12) . (2.9)

2.5. Control strategies for the TAB converter 39
2
π2
π−
4
π
4
π−
013ϕ
Γ
Figure 2.9: Nonlinear relationship between Γ and ϕ13.
Fig. 2.9 shows the nonlinear relationship between Γ and ϕ13. The solution of (2.8)is found to be
ϕ13 = sign(Γ) ×(
π
2
(1 −√
1 − |Γ|π/4
)). (2.10)
The PI compensator in Fig. 2.8 can be implemented digitally or in an analogcircuit, while the calculation of ϕ13 can be performed by a digital signal proces-sor (DSP) [51]. A constant power can be drawn from the fuel cell by imposingan appropriate phase shift through the above calculations. The transient powerdifference is then leveled by the battery automatically.
Notwithstanding the simplicity and straightforwardness, it has to be noted thatthe control strategy is sensitive to the delay in the circuit. Power switches anddrive circuits have significant switching and delay times. Furthermore, controlcircuits also introduce propagation delay. The delay has a direct effect on theactual phase shifts and thus the power flow. This is of serious concern if theconverter is switched at a high frequency. In fact, with the direct shift anglecalculation method the regulator of the fuel cell power is open-loop and thereforenot very precise. The power flow is sensitive to the phase shift. As a result, aconsiderable deviation may exist in the power delivered by the fuel cell and theamount actually desired.
2.5.2 Dual-PI-loop control
To improve the regulation performance, the new control strategy proposed for theTAB converter has two PI feedback loops as illustrated in Fig. 2.10. The controlscheme can be fully digital and implemented with a DSP. Regulation of the fuelcell power is performed by a digital PI algorithm instead of feedforward control.The output voltage V2 is controlled by ϕ12, while the regulation of ϕ13 keeps thefuel cell power constant. The fuel cell power P1 is calculated from measurementsof the fuel cell voltage VFC and the average fuel cell current IFC sensed througha low-pass filter (LPF). For controlling the power flow, the proposed dual-PI-loopscheme is much less sensitive to propagation delay in the circuit because it isautomatically compensated for by the PI regulators. As long as the delay is not

40 Chapter 2. Triple-active-bridge converter
PI
VFC
IFC
Multiply
Filter
Limiter
DSP
iFC
LPF
Phase-
shifted
square-
wave
generator
PI
ϕ12
ϕ13
VFC
VLoad+-
+
-
PWM1
PWM2
PWM3
PWM4
PWM5
PWM6
FC
BT
Lo
ad
TAB
converter
V2 (VLoad)* *
P1 (PFC)
P1 (PFC)* *
V2 (VLoad)
Figure 2.10: Dual-PI-loop control scheme for the fuel cell and battery system.
Table 2.1: Specifications for the simulation of the fuel cell and battery system
Description Symbol ValueMaximum fuel cell power P1 (PFC) 500 WFuel cell voltage V1 (VFC) 24 V @ 500 WLoad voltage V2 (VLoad) 400 VBattery voltage V3 (VBT ) 48 V (12 V per unit, 4 in series)Switching frequency fs 100 kHzInductance L1 0.415 µHInductance L2 115 µHInductance L3 2.77 µH
time-varying (this is true in most cases), it has little impact on the performance ofthe control system. This control scheme will be further elaborated in Section 3.4in the next chapter.
2.6 Simulation of the TAB converter
To investigate the TAB topology and verify the control strategies, computer sim-ulations under various operating conditions were carried out. The specificationsof the system for simulation are given in Table 2.1.
2.6.1 Open-loop operation
A component-level Spice model was developed to investigate the performance ofthe system using the ICAP4 simulation software. The fuel cell model was imple-mented with the simplified model described in [66] (see Fig. 2.11). The fuel celloperating voltage is given by
VFC = EFC − Rint, (2.11)

2.6. Simulation of the TAB converter 41
EFC
Rp
Cdl
Rs
VFC
IFC
Figure 2.11: Basic equivalent dynamic circuit model of a 500 W PEM fuel cell [66].
where Rint = Rp+Rs is the fuel cell internal resistance, Rp = 0.23 Ω, Rp = 0.55 Ω;Cdl = 270 mF is the capacitance of the charge double layer; EFC is a nonlinearvoltage source represented by [66]
EFC = Erev − A ln
(IFC
I0
)+ B ln
(1 − IFC
Il
), (2.12)
where Erev = 41.8 V is the reversible cell voltage; A = 0.3 V is the activationoverpotential; I0 = 4.6 µA is the exchange current; B = 0 is the concentrationpolarization constant. B is zero because the steady-state characteristic has notyet reached the region of concentration polarization, and therefore Il, being thelimiting current, is also not relevant for the modeled fuel cell [66]. The outputvoltage range of the fuel cell is 20 to 40 V, with a maximum power of 500 W at 24 V.Since the system incorporates energy storage, only the steady-state characteristicof the fuel cell is interested.
Fig. 2.12 illustrates simulation results – the voltages generated by the bridges(v1, v2, and v3) and the currents through the transformer windings (i1, i2, and i3)– of the TAB converter in Fig. 2.5 under open-loop control.
2.6.2 Closed-loop control
Various operating conditions with closed-loop control were investigated to verifythe effectiveness of the power control algorithm based on the PI and feedforwardcontrol scheme. The PI compensator in Fig. 2.8 was implemented as
Gc(s) = K1 + τs
τs. (2.13)
Fig. 2.13 shows the response of the system to step changes in the load which weresimulated by adding/removing a resistor in parallel with the output dc capacitor.As seen, the output voltage V2 is kept constant at 400 V and the power deliveredby the fuel cell P1 remains constant at 500 W while the load power varies from300 W to 500 W and finally to 700 W. As the load power increases, ϕ12 increasesand ϕ13 decreases. This results in more power being delivered to the load. Assoon as a power deficiency or excess appears due to load variations, the converterregulates this extra power flow from or into the battery.

42 Chapter 2. Triple-active-bridge converter
2.483m 2.487m 2.491m 2.495m 2.499m
time in secs
2.483m 2.487m 2.491m 2.495m 2.499m
time in secs
2
3
1
(a) (b)
3
2
1
v1
v2
v3
i1
i2
i3
Time: 2 µs/div Time: 2 µs/div
Figure 2.12: Simulation results of the TAB converter in Fig. 2.5 in steady-state opera-tion defined by Table 2.1 under open-loop control, showing (a) the voltagesgenerated by the bridges (v1: 20 V/div, v2: 500 V/div, and v3: 50 V/div)and (b) the currents through the transformer windings (i1: 20 A/div,i2: 1 A/div, and i3: 5 A/div).
1.50m 2.50m 3.50m 4.50m 5.50m
time in secs
-800
-400
0
400
800
2
4
1
Power delivered by the fuel cell PFC (P1)
Power consumed by the load PLoad (-P2)
Power supplied by the battery PBT (P3)
(Wat
ts)
400
500
600
700
800
(Volt
s)
Output voltage VLoad (V2)
3
Time: 0.5 ms/div
Figure 2.13: Simulation results of the power flow control in the TAB converter ofFig. 2.5 with the PI and feedforward control scheme in Fig. 2.8, show-ing the change of the load from 300 W to 500 W and then to 700 W.
2.6.3 Battery charging
Another energy flow situation is charging/discharging the battery, when the bat-tery is over-discharged/charged. By manipulating the power delivered by the fuelcell generator, the battery can be charged/discharged, taking the system power

2.6. Simulation of the TAB converter 43
-300
-100
100
300
500
390
410
430
450
470
2
3
4
1
-
2
3
4
1
1.50m 2.50m 3.50m 4.50m 5.50m
time in secs
(Wat
ts)
(Vo
lts)
Power delivered by the fuel cell PFC (P1)
Power consumed by the load PLoad (-P2)
Power supplied by the battery PBT (P3)
Output voltage VLoad (V2)Time: 0.5 ms/div
Figure 2.14: Simulation results of the power flow control in the TAB converter ofFig. 2.5 with the PI and feedforward control scheme in Fig. 2.8, show-ing the process of charging the battery with an average power of around120 W from 2.5 ms to 4.5 ms.
loss into account, with an average current:
IBT = PBT /VBT = −(PFC − PLoad − PLoss)/VBT , (2.14)
where IBT is the average discharging current (see the reference direction of iBT
in Fig. 2.5), PFC = P1 is the power generated by the fuel cell, PLoad = −P2 isthe power consumed by the load, PBT = P3 is the power supplied by the battery,PLoss is the total loss in the system, and VBT is the battery terminal voltage. Thecharging/discharging process can be terminated by making PFC = PLoad + PLoss.Fig. 2.14 demonstrates the charging process. The output voltage V2 is regulatedat 400 V and the power consumed by the load PLoad is kept at 300 W. The totalloss power in the simulated system is estimated at 30 W. The fuel cell power PFC
is increased from 330 W to 450 W. Consequently, the battery is charged with apower of around 120 W from 2.5 ms to 4.5 ms (a very short period only for thedemonstration with the simulator). However, it is only possible to charge thebattery when the power delivered to the load is less than the maximum poweravailable from the fuel cell.
2.6.4 Start-up stage considerations
In the start-up stage of the TAB converter, (2.10) is not suitable for calculating ϕ13.Because the load side voltage V2 is zero at t = 0, the PI controller in Fig. 2.8 willbe saturated and thus ϕ12 = π/2. According to (2.7), P12 is almost zero becauseV2 is very low. Therefore, Γ will be at its maximum (see (2.9)). As can be inferred

44 Chapter 2. Triple-active-bridge converter
-1200
-600
0
600
1200
0
100
200
300
400
2
4
1(W
atts
)
(Volt
s)
0.1m 0.3m 0.5m 0.7m 0.9m
time in secs
Fuel cell power PFC (P1)
Load power PLoad (-P2)
Battery power PBT (P3)
VLoad (V2)
3
Time: 0.1 ms/div
Figure 2.15: Simulation results of the power flow control in the TAB converter ofFig. 2.5 with the PI and feedforward control scheme in Fig. 2.8, show-ing the start-up stage with the start-up algorithm.
from (2.10) and Fig. 2.9, ϕ13 will reach its maximum value. This means that thefuel cell has to deliver a huge amount of power both to the load and battery. Asa consequence, the fuel cell may collapse because of the excessive power demand.To solve this problem, an additional algorithm based on the measurement of theload side voltage V2 is used for the start-up. If the output voltage has not reachedthe preset value, say, 350 V, then the controller sets ϕ13 to zero. This leads to thebattery delivering the maximum power to the load, helping the fuel cell charge theload side filter capacitor CL. As a result, V2 increases quickly. After it reaches thepreset value, the start-up procedure ends. Then, ϕ13 is calculated by using (2.10).Fig. 2.15 shows the simulation results with this start-up algorithm. It is shownthat the power drawn from the fuel cell P1 does not exceed its maximum level(500 W) during the start-up. A very short transient of negative P1 as shown inFig. 2.15 should not be a concern, because it can be buffered by the filter capacitorsparalleled with the fuel cell bridge.
Over-current is observed in the start-up stage, as demonstrated in Fig. 2.16.This drawback exists in both DAB and TAB converters in which the power flowis controlled by means of phase-shifting the bridges. Because the output filtercapacitor (CL in Fig. 2.5) is being charged from zero voltage during the start-upstage (i.e., V2 rises from zero) while the fuel cell and battery voltages are at theiroperating level, an over-charge on the inductors occurs. The current waveformsexhibit a triangle shape having an exceedingly high peak (see Section 3.8, Fig 3.27on page 97). Furthermore, the load side bridge is hard-switched. Care has tobe taken to avoid over-current in the start-up stage. This issue will be furtheraddressed in Section 3.8 and methods for soft start-up will be discussed there.

2.7. Analysis of system loss 45
-700
-500
-300
-100
100
-20.0
-10.0
0
10.0
20.0
2
3
1
0.50m 1.50m 2.50m 3.50m 4.50m
time in secs
i 1
(Am
ps)
i 2
(Am
ps)
Fuel cell side current i1
Load side current i2
Battery side current i3
Over-current
-50.0
50.0
150
250
350i 3
(A
mp
s)
Time: 0.5 ms/div
Figure 2.16: Simulation result of over-current at the start-up stage in the TAB con-verter of Fig. 2.5 with the PI and feedforward control scheme in Fig. 2.8.
2.7 Analysis of system loss
2.7.1 Active and reactive power in the DAB converter
In the DAB converter of Fig. 2.2 (on page 33), in order to have a certain amount ofactive power flow, a phase shift between the primary and secondary has to occur.As a result, the current drawn from the dc source (for instance, iP1 in Fig. 2.2)contains high-frequency components (ripple) as illustrated in Fig. 2.17.
In the following analysis, unity dc conversion ratio (i.e., d = 1) is assumed. Toequalize the average current Iavg in the two situations in Fig. 2.17, the peak valueof the current, Ipeak as indicated in Fig. 2.17, should be in accordance with
Ipeak =π
π − ϕIavg. (2.15)
It is obvious that for transferring the same mount of active power (i.e., equal Iavg),a larger phase shift leads to a higher peak current. Therefore, a smaller phase shiftis preferred because it reduces the conduction loss of the switching devices andthe rms loss of the transformer. The delivered active power P is given by
P =1
2π
∫ 2π
0
i1(ωt)V1 d(ωt) = IavgV1 =π − ϕ
πIpeakV1, (2.16)
whereas the reactive power Q (the shadowed area in Fig. 2.17) can be calculatedas
Q =ϕ
2πIpeakV1. (2.17)
We can calculate the total apparent power S by the definition:
S =√
P 2 + Q2. (2.18)

46 Chapter 2. Triple-active-bridge converter
ϕ
π
Iavg0
tω
Ipeak
ϕπ
Iavg0
tω
Ipeak
iP1
(a) (b)
iP1
Figure 2.17: A comparison of two current wave shapes having equal average values at(a) a large phase shift and (b) a small phase shift.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50.88
0.90
0.92
0.94
0.96
0.98
1.00
/ϕ π
γ
Figure 2.18: Power factor (or transformer utilization factor) γ versus phase shift ϕ inthe DAB converter of Fig. 2.2 (d = 1).
From the viewpoint of transferring active power, let us define the power factor (ortransformer utilization factor) as
γ =P
S=
π − ϕ√ϕ2/4 + (π − ϕ)
2. (2.19)
Fig. 2.18 plots the curve of γ as a function of ϕ. It is evident that a smallerphase shift leads to a higher power factor. At the maximum phase shift (ϕ = π/2),γ is close to 0.89, while at a smaller phase shift, the power factor approaches unity.It is notable that when the phase shift is lager than π/4, it is less effective to boostthe (active) power flow through the increment of the phase shift. In other words,the derivative dP/dϕ decreases as the phase shift increases (see also Fig. 2.4 onpage 34). Therefore, under the operation condition of d = 1 (unity dc conver-sion ratio), it is preferable to choose a small operating phase shift4. This can be
4Note that this conclusion is based on the assumption of the operation condition of d = 1.

2.7. Analysis of system loss 47
π
0tω θ=
i1
ϕ1(0)i
1( )i π1( )i ϕ
1( )i π ϕ+
1(2 )i π
2π
Figure 2.19: Current waveform in the DAB converter (d = 1).
achieved by choosing a small inductance. However, this would increase the sensi-tivity of the power flow to the phase shift and decrease the system’s immunity tonoise, which implies that a smaller phase shift requires higher accuracy/resolutionof the control circuit. The choice of the operating phase shift, i.e., the design ofthe inductance, is a trade-off between the power factor (utilization of the trans-former) and the system controllability. In case of a digitally controlled system,because of the limited resolution of the phase shift at a high switching frequency,special attention has to be paid if a small operating phase shift is desired. Tosummarize, it is advisable to choose the operating phase shift ϕ within, say, 15 to45 degrees. This does not deteriorate the power factor while the control system iseasy to implement.
2.7.2 Rms current analysis
The rms current is calculated based on the unity dc conversion ratio d = 1. Underthis operating condition the current waveform in the DAB converter is trapezoidal(see Fig. 2.19). The current through the transformer primary winding, i1, over acomplete switching cycle can be expressed as:
i1(0) = − V1
ωLϕ, (2.20)
for 0 θ < ϕ
i1 (θ) = i1 (0) +2V1θ
ωL=
2V1
ωL
(θ − 1
2ϕ
), (2.21)
for ϕ θ < π
i1 (θ) =V1
ωLϕ, (2.22)
for π θ < π + ϕ
i1 (θ) =2V1
ωL
(1
2ϕ − θ
), (2.23)
and for π + ϕ θ < 2π
i1 (θ) = − V1
ωLϕ. (2.24)

48 Chapter 2. Triple-active-bridge converter
20
25
30
35
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
/ϕ π
I rm
s (
A)
Figure 2.20: Irms versus operating phase shift ϕ for transferring a certain amount ofactive power P ∗ (P ∗ = 500 W, V1 = 24 V, f = 100 kHz, d = 1).
On the basis of the above equations the rms value of the current, according to thedefinition, is
Irms =
√1
T
∫ T
0
i21 (t) dt =V1ϕ
ωL
√1 − 2
3πϕ, (2.25)
where T is the switching period. For transferring a certain amount of power P ∗,many inductance and phase shift combinations exist. For a given power flow andoperating phase shift, the inductance can be calculated from (2.2) as
L =V1V2
nωP ∗ϕ
(1 − |ϕ|
π
). (2.26)
Substituting (2.26) into (2.25), we have
Irms =V1ϕ
ωL
√1 − 2
3πϕ =
P ∗√
1 − 23π
ϕ
V1
(1 − |ϕ|
π
) . (2.27)
From Fig. 2.20 it is evident that a small phase shift is preferable to transfer thedesired power because of the low rms current (if d = 1). This also qualitativelyholds for the TAB converter because with the ∆-model representation the TABconverter can be analyzed based on the two-port system.
Furthermore, the results presented in Appendix B suggest that the square-wave mode is the best operating condition from the viewpoint of system rms loss,if the dc voltages at the ports are already equal when referred to the primary (i.e.,d = 1). The port voltages should be kept constant. In a battery storage three-port system the TAB converter will be designed in such a way. However, when asupercapacitor is used as the storage, the balancing condition can not be fulfilledbecause of the wide-range variation of the supercapacitor operating voltage. In

2.8. System average model derivation 49
order to reduce the rms loss, the duty ratio of the supercapacitor side voltageshould be adjusted. Duty ratio control can also achieve ZVS for all the switches.This will be explained in Section 3.3.
2.8 System average model derivation
To design the parameters of the controller for closed-loop operation, the smallsignal transfer function based on an average model will be derived first. However,the conventional state-space-average model is not applicable for the phase-shiftmodulated converters (both DAB and TAB) because the switching frequency is apossible control variable as implied by (2.2).
2.8.1 DAB converter small signal average model
Fig. 2.21 shows the basic DAB converter modeling. The DAB converter can beregarded as a controlled dc current source, the average current over one switchingcycle at the load side being a function of the phase shift [26]. Based on thisapproach the small signal average model of the DAB converter can be derived.Using (2.2), the average value of the current iP2 is given by
IP2 = − P
V2= − V1
nωLϕ
(1 − |ϕ|
π
), (2.28)
where the minus sign is due to the definition of the reference direction of thecurrent. This current source function is nonlinear. For a control-oriented smallsignal model, it should be linearized at the operating point ϕo:
Go =dIP2
dϕ
∣∣∣∣ϕo
= − V1
nωL
(1 − 2
π|ϕo|)
, (2.29)
where Go denotes the gain of the DAB converter. Writing it in small signal format,we have
IP2 = Go ϕ = − V1
nωL
(1 − 2
π|ϕo|)
ϕ. (2.30)
The small signal characteristic of the DAB converter can be viewed as a pro-portional function. The gain Go is related to the operating point, being high at asmall phase shift and low at a large phase shift. Fig. 2.22 shows the control loopblock diagram of the system, where H(s) is the transfer function of the outputfilter and load, and Gc(s) is the controller (e.g., a PI-type compensator). Theblock with gain “-1” is due to the definition of the reference direction of iP2 inFig. 2.21. In the ideal circuit the output filter is a purely capacitive filter:
H(s) =RL
1 + RLCLs, (2.31)
where RL is the equivalent load resistance, CL is the filter capacitance. The PIcompensator can be expressed as
Gc(s) = K1 + τs
τs, (2.32)

50 Chapter 2. Triple-active-bridge converter
RLCL
f( )ϕ
L
1 : n
V1
v1 v2 CL RL
V2
iP2
i1
iP1
IP2
Port 1 Port 2
Figure 2.21: Average model of the DAB converter – a controlled dc current source.
Gc(s)+
-
Go H(s)
KF
ϕ% 2PI% 2V%
*
2V%
-1
Figure 2.22: Small signal block diagram representation of the DAB converter.
where K is the proportional gain and τ is the time constant. Now, the open-looptransfer function GOL(s) can be written as
GOL(s) = KF KV1
nωL
(1 − 2
π|ϕo|)
1 + τs
τs
RL
1 + RLCLs, (2.33)
where KF is the feedback gain. Suppose that the load RL is purely resistive. Thetransfer function has two poles and one zero. The frequency of the nonzero poleis determined by the load, being high at heavy load and low at light load. For agiven operating point ϕo, the whole system is of second order.
Note that the inductor L in the circuit of Fig. 2.21 would increase the orderof the system [67]. However, it is neglected in the modeling process. In fact,the inductance is so small that the pole frequency is beyond interest (usuallyabove the bandwidth frequency). Therefore, the derived small signal model issufficiently accurate in the interesting frequency range. In addition, the equivalentseries resistance (ESR) of the output capacitor is also neglected to simplify thepresentation.
2.8.2 TAB converter small signal average model
Based on the small signal modeling method for the DAB converter, the linearizedsmall signal average model of the TAB converter can be derived. As shown inFig. 2.23, the converter is modeled as three dc current sources whose amplitudesare controlled by the two phase shifts.
The currents at the ports (iP1, iP2, and iP3, see Fig. 2.5) can be averagedover one switching cycle. Let us denote the average values of iP1, iP2, and iP3 by

2.8. System average model derivation 51
VFC
RLCL
VBT
1PI
2PI
3PIPort 1 ( )1 12 13f ,ϕ ϕ
( )2 12 13f ,ϕ ϕ
( )3 12 13f ,ϕ ϕ
Port 2
Port 3
TAB converter
Figure 2.23: Average model of the TAB converter.
IP1, IP2, and IP3, respectively. Note that for the three-port system there are onlytwo independent variables. Therefore, IP3 is redundant. We can assume that thevoltages at the ports are kept constant. Then, the average currents are the powersdivided by the port voltages. By using the power flow equations (2.4) and (2.6),we obtain
IP1 =P1
V1=
V2
n2ωL12ϕ12
(1 − |ϕ12|
π
)+
V3
n3ωL31ϕ13
(1 − |ϕ13|
π
),
IP2 =P2
V2=
V3
n2n3ωL23(ϕ13 − ϕ12)
(1 − |ϕ13 − ϕ12|
π
)− V1
n2ωL12ϕ12
(1 − |ϕ12|
π
),
(2.34)The current source functions are nonlinear and therefore should be linearized
at the operating point for a control-oriented model as
I = Kϕ12ϕ12 + Kϕ13
ϕ13. (2.35)
The factors of linearization can be derived by partial differentiation of the currentsource functions:
Kϕ12=
∂I
∂ϕ12
∣∣∣∣(ϕ12o,ϕ13o)
and Kϕ13=
∂I
∂ϕ13
∣∣∣∣(ϕ12o,ϕ13o)
, (2.36)
where (ϕ12o, ϕ13o) is the operating point. The resulting small signal representa-tions are
IP1 =V2
n2ωL12
(1 − 2
π|ϕ12o|
)ϕ12 +
V3
n3ωL31
(1 − 2
π|ϕ13o|
)ϕ13,
IP2 = −[
V3
n2n3ωL23
(1 − 2
π|ϕ13o − ϕ12o|
)+
V1
n2ωL12
(1 − 2
π|ϕ12o|
)]ϕ12
+V3
n2n3ωL23
(1 − 2
π|ϕ13o − ϕ12o|
)ϕ13.
(2.37)

52 Chapter 2. Triple-active-bridge converter
G11
G21
G12
G22+
+
+
+-1
12ϕ%
13ϕ%
2PI%
1PI%
H2(s)
V1H1(s)
2V%
1P%
Figure 2.24: Small-signal control-to-output block diagram of the TAB converter.
Let
G11 = −[
V3
n2n3ωL23
(1 − 2
π|ϕ13o − ϕ12o|
)+
V1
n2ωL12
(1 − 2
π|ϕ12o|
)],
G12 =V3
n2n3ωL23
(1 − 2
π|ϕ13o − ϕ12o|
),
G21 =V2
n2ωL12
(1 − 2
π|ϕ12o|
),
G22 =V3
n3ωL31
(1 − 2
π|ϕ13o|
).
(2.38)
Then, we haveIP2 = G11ϕ12 + G12ϕ13,
IP1 = G21ϕ12 + G22ϕ13.(2.39)
Writing them in matrix format, we get[IP2
IP1
]=
[G11 G12
G21 G22
] [ϕ12
ϕ13
]= Go
[ϕ12
ϕ13
]. (2.40)
The control-to-output model of the TAB converter is shown in Fig. 2.24 (thecross-coupling will be discussed in Section 3.5.3). H2(s) is the transfer function ofthe output capacitor and load. The block with gain “V1” is needed because thepower is equal to the average current times the port voltage. H1(s) is the transferfunction of the LPF in Fig. 2.10. The system is a two-input two-output system.
The TAB converter average model was simulated with Matlab/Simulink. Thesimulation results of the system response to step load changes agree well with thecircuit-based component-level simulation. The simulation results will be shown inFig. 3.10 on page 82 (in Section 3.5.2).
2.8.3 First harmonic approach
An alternative way for analyzing the DAB and TAB converter is the first harmonicapproach (also called fundamental model analysis [23], [52]). The first harmonic

2.8. System average model derivation 53
model has enough accuracy in the most phase shift range. This will be shown inSection 6.8.3).
DAB converter first harmonic model
In the DAB converter the peak values of the fundamental components (Vf1 and
Vf2, where the subscript “f” stands for “fundamental”) of the two square-wavevoltages (v1 and v2) are given by
Vf1 =4
πV1 and Vf2 =
4
πV2. (2.41)
The power flow can be calculated by
P =Vf1Vf2
2nωLsinϕ =
8V1V2
π2nωLsin ϕ. (2.42)
Then, the load side average current can be expressed as
IP2 = − P
V2= − 8V1
π2nωLsin ϕ. (2.43)
The small signal gain of the DAB converter is derived as
Go =dIP2
dϕ
∣∣∣∣ϕo
= − 8V1
π2nωLcos ϕo. (2.44)
TAB converter first harmonic model
For the TAB converter, the first harmonic approach allows a simpler small signalmodeling. The approach is the same as for the DAB converter. In the TABconverter the peak values of the fundamental components of the voltages v1, v2,and v3 are given by
Vf1 =4
πV1, Vf2 =
4
πV2, and Vf3 =
4
πV3. (2.45)
The power flow in the system can be expressed as
P1 =8V1V2
π2n2ωL12sinϕ12 +
8V3V1
π2n3ωL31sinϕ13,
P2 =8V2V3
π2n2n3ωL23sin (ϕ13 − ϕ12) − 8V1V2
π2n2ωL12sinϕ12,
(2.46)
Then, the average currents at the ports are
IP1 =P1
V1=
8V2
π2n2ωL12sin ϕ12 +
8V3
π2n3ωL31sin ϕ13,
IP2 =P2
V2=
8V3
π2n2n3ωL23sin (ϕ13 − ϕ12) − 8V1
π2n2ωL12sinϕ12,
(2.47)

54 Chapter 2. Triple-active-bridge converter
The differentiation of IP1 and IP2 gives
IP1 =8V2
π2n2ωL12cos ϕ12oϕ12 +
8V3
π2n3ωL31cos ϕ13oϕ13,
IP2 = −[
8V3
π2n2n3ωL23cos (ϕ13o − ϕ12o) +
8V1
π2n2ωL12cos ϕ12o
]ϕ12
+8V3
π2n2n3ωL23cos (ϕ13o − ϕ12o) ϕ13.
(2.48)
The components of the small signal gain matrix of the TAB converter thereforeturns out as
G11 = −[
8V3
π2n2n3ωL23cos (ϕ13o − ϕ12o) +
8V1
π2n2ωL12cos ϕ12o
],
G12 =8V3
π2n2n3ωL23cos (ϕ13o − ϕ12o) ,
G21 =8V2
π2n2ωL12cos ϕ12o,
G22 =8V3
π2n3ωL31cos ϕ13o.
(2.49)
2.9 High-power three-phase TAB converter
5To extend the TAB topology toward high-power applications, the three-phaseconcept used in the DAB converter [23] can be applied to the TAB converter [68].In this section, a three-phase TAB converter topology suitable for power manage-ment is presented, and its potential for high-power applications is investigated.It is shown that the three-phase configuration increases the current rating of thesystem and thus the power rating. The converter is promising for electric vehicles(e.g., fuel cell/battery cars) and electricity generation systems.
2.9.1 Three-phase TAB topology
To extend the topology toward high-power applications, the standard way is toreplace the single-phase bridge with a three-phase bridge, which enables highercurrent handling ability. The resulting converter topology is shown in Fig. 2.25.The circuit consists of three inverter stages operating in a six-step mode withcontrolled phase shifts. The three bridges are interconnected by a three-port three-phase symmetrical transformer, and the inductors in the circuit represent theleakage inductances of the transformer (and external inductors if necessary). The
5This section is based on the following paper:
H. Tao, J. L. Duarte, and M. A. M. Hendrix, “High-power three-port three-phase bidirectionalDC-DC converter,” in Proc. IEEE Industry Application Society Conference and Annual Meeting(IAS’07), New Orleans, USA, Sep. 2007, pp. 2022–2029.

2.9. High-power three-phase TAB converter 55
V1
V3
V2
High-frequency three-port three-phase
symmetrical transformer
or
MOSFET IGBT
v1A
P S
T
G1 G2
G3
L1APrimary Secondary
Tertiary
A
B
C
Coupled windings, phase A
Coupled windings, phase B
Coupled windings, phase C
L1B
L1C
v1B
v1C
i1A
i1B
i1C
v3A
v3B
v3C
i3A
i3B
i3C
L3A
L3B
L3C
v2A
v2B
v2C
i2A
i2B
i2C
L2A
L2B
L2C
Port 1: Source
Inv 3
iP1 iP2
iP3
P1
P3
P2Inv 1 Inv 2
C1
C3
C2
Port 3: Storage
Port 2: Load
Figure 2.25: Proposed high-power three-phase TAB converter.
transformer can be either in Y-Y or in ∆-∆ connection. Note that coupling of thewindings is between the ports and there is no interphase coupling. As indicatedin the figure, windings marked with the same symbol are coupled.
The major advantage of the three-phase version is the much lower VA ratingof the filter capacitors. Thanks to the nature of the symmetry, the current stressof the switching device is significantly reduced compared with the single-phaseversion. As the current through the transformer windings is much more sinusoidalthan in the single-phase situation (this is shown in the simulation in Section 2.9.5),there are less high-frequency losses in the transformer. The proposed converterhas the potential for high-power applications (say, tens of kilowatts). The oper-ating principle is very similar to the single-phase version. With reference to theprimary side, each bridge generates a high-frequency six-step mode voltage witha controlled phase angle.
2.9.2 Three-port three-phase system modeling
The power flow in the three-port system has been extensively investigated in Sec-tion 2.4. Since no interphase coupling exists in the system, one can analyze thecircuit based on the per-phase model. For phase A, the circuit model is shownin Fig. 2.26(a), and Fig. 2.26(b) illustrates the modeling approach based on the∆-model equivalent transformer representation. According to the definitions in

56 Chapter 2. Triple-active-bridge converter
L12A
L31AL23A
v1A v2A
v3A
L1A
v2A
v3A
L2A
L3A
v1A
(a) (b)
P1A , i1A P2A , i2A
P3A , i3A
P31
A , i31
A
P12A , i12A
P 23A , i 23
A
P1A , i1A
P2A , i2A
P3A , i3A
Figure 2.26: T-model (a) and ∆-model (b) representation of the three-port transformerand inductor network (per-phase model: phase A). The magnetizing in-ductance is not shown.
Fig. 2.26(b), the power flow in the system (through phase A) can be described as
P1A = P12A − P31A,
P2A = P23A − P12A,
P3A = P31A − P23A,
(2.50)
where P1A, P2A, and P3A are the powers delivered by the primary source, load,and storage through phase A, respectively. The same model can be applied tophase B and C. Obviously, the total power of the port is the sum of the powersthrough each phase:
P1 = P1A + P1B + P1C ,
P2 = P2A + P2B + P2C ,
P3 = P3A + P3B + P3C .
(2.51)
Owing to symmetry, an analytical expression of the current can be derived [23].The average power transferred between the any two ports in the six-step wavemode, taking bidirectional power flow into consideration, is calculated to be, forinstance, between the port 1 and 2:
for 0 ≤ |ϕ| ≤ π/3
P12A =V1V2
n2ωL12ϕ12
(2
3− |ϕ12A|
2π
), (2.52)
and for π/3 ≤ |ϕ| ≤ 2π/3
P12A =V1V2
n2ωL12A
ϕ12
(1 − |ϕ12|
π− π
18 |ϕ12|)
, (2.53)
where n2 is the equivalent transformer turns ratio between the two ports (seeAppendix A). If the magnetizing inductance is neglected, n2 is equal to the physicalturns ratio in the T-model. Power flow equations for P23A and P31A are similar tothat for P12A. The maximum power flow again occurs at ±π/2. To illustrate the

2.9. High-power three-phase TAB converter 57
v1A
v2A
i12A
v3A
i23A
i31A
V1/32V1/3
12ϕ
13ϕ
tω
vPG1
2V1/3 V1/3
vSG2
vTG3
Figure 2.27: Idealized operating waveforms of the proposed three-phase TAB converterat ϕ12 = π/3 and ϕ13 = π/6 (phase A). vPG1, vSG2, and vTG3 are theneutral-to-ground voltages (see the explanation for vPG1 on page 58 withthe help of Fig. 2.25).
operation of the converter, some ideal operating waveforms are shown in Fig. 2.27,according to the model in Fig. 2.26(b).
Since the system can be regarded as voltage sources interconnected throughinductors, similar to the parallel operation of grid-frequency inverters where theactive power control is achieved by controlling the phase displacement betweenthe inverters, the three-port system can be treated like such a nanoscale grid. Thedifference, however, is that this system operates at a much higher frequency (e.g.,100 kHz) than the conventional grid frequency.
Let us define the switching function Sx = 1 when the upper switch is ON andSx = 0 when the lower switch is ON. Then, as an example, the primary port canbe modeled as (referring to the definitions in Fig. 2.25)
S1AV1 = (v1A + vPG1),
S1BV1 = (v1B + vPG1),
S1CV1 = (v1C + vPG1),
(2.54)
where V1 is the dc voltage of the port, v1A, v1B, and v1C are the phase-to-neutralvoltages, and vPG1 is the neutral (P) to ground (G1, the negative terminal of the

58 Chapter 2. Triple-active-bridge converter
1B
2B
3B
1A
2A
3A
1C
2C
3C
CoreWindings
Top view
Figure 2.28: Conventionally wound three-port three-phase spatially symmetrical trans-former.
source) voltage. Since each inverter is a balanced three-phase system, we have
v1A + v1B + v1C = 0. (2.55)
Then, we can get
vPG1 =V1
3(S1A + S1B + S1C). (2.56)
The voltage vPG1 pulsates between V1/3 and 2V1/3 as depicted in Fig. 2.27.
2.9.3 Symmetrical transformer design
The main challenge of the proposed high-power three-phase TAB converter isthe design of the three-phase symmetrical transformer. It is important to keepthe symmetry of the leakage inductances. Otherwise, the current (transferredpower) will not be equal for the three phases. The transformer construction maybe necessary to be physically symmetrical in order to have an identical leakageinductance in each phase. Otherwise, the external inductances should be adjustedto achieve an equal per-phase leakage inductance.
Basically, there are two ways to wind a transformer: conventionally and coaxi-ally. A conventional winding technique for designing the three-phase symmetricaltransformer for a two-port converter has been proposed in [23]. The designed spa-tial three-phase symmetrical transformer can easily be extended to the three-portversion as illustrated in Fig. 2.28. However, suitable high-frequency core shapesare commercially unavailable. Note that for a simple solution it would be possi-ble to design the transformer as three separate subtransformers since there is nointerphase coupling; however, this may result in a higher transformer core loss,because the flux canceling effect does not apply (the sum of the three phase fluxesequals zero).
Coaxial winding techniques are commonly used in radio-frequency transform-ers. Fig. 2.29 shows the structure of a coaxially wound transformer. This techniqueoffers a feasible solution to contain the leakage flux within the inter-winding spaceand thus prevents the core from being saturated locally [69]. As a result, the core

2.9. High-power three-phase TAB converter 59
Primary - tube
Secondary - litz
Toroid core
Toroid core Primary - tube
Secondary - litz
Figure 2.29: Coaxially wound transformer.
A
B C
Core
Primary - tube
Secondary - litz
Tertiary - litz
Figure 2.30: Coaxially wound three-port three-phase symmetrical transformer.
and copper losses are lower, and localized heating is avoided [69]. Furthermore,from a mechanics point of view, this technique offers reduced forces within thetransformer and a robust construction. In [69], it has been demonstrated thatcoaxial windings can lead to low loss, low leakage inductance power transformersin high-frequency soft-switched dc-dc and resonant converters. Some of the im-portant loss aspects such as the influence of skin effect on winding resistance, thevariation of core loss caused by non-uniform core flux density, and the choice ofthe principle dimensions and aspect ratios for maximum efficiency were examinedin [70]. Moreover, it is also possible for the primary to have multiple turns [71].Coaxial winding techniques therefore provide a viable method for the constructionof the converter transformer.
Fig. 2.30 shows the schematic of the proposed coaxially wound three-port three-phase transformer. The primary of each phase consists of a straight tube of circularcross section. The star point is realized by shorting the tubes at one end. Toroidalcores are slipped over each tube to form the magnetic medium. The secondaryand tertiary wires can now be wound inside the primary tube. For the proposedconverter, the windings can be arranged as: the primary using a tube and the sec-

60 Chapter 2. Triple-active-bridge converter
Table 2.2: Simulation parameters for the three-port three-phase system
Description Symbol ValuePrimary source voltage V1 48 V dcLoad side voltage V2 800 V dcStorage voltage V3 48 V dcSwitching frequency fs 100 kHzTransformer turns ratio n2 16.7Transformer turns ratio n3 1Inductances at port 1 L1A, L1B , L1C 0.05 µHInductances at port 2 L2A, L2B , L2C 0.05 µHInductances at port 3 L3A, L3B , L3C 14 µHNominal load resistance RL 64 Ω (for 10 kW)Output filter capacitor CL 5000 µF
ondary and tertiary using twisted litz wires. With this coaxial winding technique,the leakage inductance can be minimized. Hence, external inductors should bedesigned according to the desired amount of power flow.
2.9.4 Control strategy
The control scheme aims to regulate the output voltage and the power of the pri-mary source simultaneously by using the two phase shifts as the control variables.The storage supplies/absorbs the transient power difference between the load andthe primary source (see Section 2.5 and Section 3.4). Similar to the single-phaseTAB converter (see Fig. 2.10 on page 40), the control system can be implementedwith PI regulators based on the dual-PI-loop control strategy, one being used toregulate the output voltage V2 and the other controlling the power of the primarysource P1.
The average model of the converter is identical to the single-phase version, andthe converter linearized small signal gain matrix components (G11, G12, G21, andG22) can be derived from the power flow equations.
2.9.5 Simulation results of the three-phase TAB converter
To investigate the performance of the proposed topology, the three-phase TABconverter and its control scheme were simulated with PSIM7.0 under a variety ofoperating conditions. Table 2.2 gives the list of parameters used for simulation.A standard voltage set, 48 V primary source, 48 V storage, and 800 V dc output,is assumed. Because of the high switching frequency (100 kHz), the high power(10 kW), and the low voltage (48 V), the required inductances are very small forthe source and storage sides in this simulated case.
Simulation results in Fig. 2.31(a) illustrate the operating waveforms of theconverter, i.e., the voltages applied to the transformer and inductor network andthe corresponding currents through the windings of phase A at ϕ12 = π/3 and

2.9. High-power three-phase TAB converter 61
v1A
v2A
v3A
i1A
i2A
i3A
iP1
(A)
(A)
(A)
(A)
(V)
(V)
(V)
v1A
v2A
v3A
i1A
i2A
i3A
iP1
(a) (b)
Figure 2.31: Simulation results of the three-phase TAB converter in Fig. 2.25, showingthe voltages applied to the transformer and inductor network and thecorresponding currents through the windings in phase A at (a) ϕ12 = π/3and ϕ13 = π/6 and (b) ϕ12 = π/3 and ϕ13 = 0.
ϕ13 = π/6. In this operating point the average power of the storage port P3
equals zero. The current drawn from the primary source port iP1 (before filtering,as indicated in Fig. 2.25) is also shown in the figure, and the ripple is muchreduced compared with the single-phase TAB converter (see also Fig. 2.17). Forthe operating point of at ϕ12 = π/3 and ϕ13 = 0, results from simulation are shownin Fig. 2.31(b). As can be seen, the currents are close to sinusoidal waveforms.
Simulation results of the power flow control based on the dual-PI-loop controlstrategy (see Fig. 2.10 on page 40) are demonstrated in Fig. 2.32. In Fig. 2.32(a)the load pulsates between 5 kW and 15 kW in a time interval of 10 ms. As shown,the power supplied by the primary source P1 remains at 10 kW – the average powerconsumed by the load, and the unmatched power between the source and load issupplied/absorbed by the storage. Furthermore, Fig. 2.32(b) displays the responseof the control system to an inverter-type load which draws sinusoidal current fromthe capacitor at the load port. The average load power (−P2) is again 10 kW. It isevident that the control system is capable of regulating the output voltage V2 andpower of the primary source P1 simultaneously. The amount of the ripple in P1 isdetermined by the bandwidth of the control loop. The higher the bandwidth, the

62 Chapter 2. Triple-active-bridge converter
P1
-P2
P3
12ϕ
13ϕ
(rad
)(r
ad)
(W)
(W)
(W)
P1
-P2
P3
12ϕ
13ϕ
(a) (b)
Figure 2.32: Simulation results of the power flow control of the three-phase TAB con-verter in Fig. 2.25 with (a) a pulsating load between 5 and 15 kW and (b)an inverter-type load with average power P2 = 10 kW.
lower the ripple. In both of the simulated cases (Fig. 2.32 (a) and (b)), the twoPI regulators are implemented as
Gc1(s) = 0.21 + 0.01s
0.01sand Gc2(s) = 1000
1 + 0.01s
0.01s, (2.57)
where Gc1(s) controls the power of the primary source P1 and Gc2(s) regulatesthe output voltage V2. The feedback gains are equal to 1, and the phase shiftmodulator gain is π/500.
Due to the fact that the converter is symmetrical in three-phase, the onlypossible control variable is the phase shift between the bridges. Therefore, othercontrol methods such as the duty ratio control to extend the soft-switching region(to be presented in Section 3.3) can not be implemented straightforwardly in thistopology. This converter will be soft-switched under the condition that all the dcvoltages at the ports remain nearly constant. However, it suffers from a limitedsoft-switched operating region if one or more ports have a wide operating voltage.This limitation is stricter than in the single-phase version [23].

2.10. Conclusions 63
2.10 Conclusions
Since alternative energy generators like fuel cells have a slow dynamic response, astorage element is necessary to ensure a proper operation of the primary source.This chapter has presented a three-port energy management system, an exampleof which is a fuel cell and battery generation system and a load. With the ex-ternal leveling device the operation of the primary source can be optimized. Theproposed three-port TAB converter, being an extension of the two-port DAB con-verter topology, comprises three inverter stages which are linked by a three-windingtransformer and operated in a high-frequency square-wave mode.
The circuit interfaces a primary source and energy storage to a load, and man-ages the power flow that is controlled by the phase shifts of the high-frequencyvoltages. For this two-input two-output control system, two strategies were pre-sented, of which the dual-PI-loop control is less sensitive to propagation delay.The system loss is briefly investigated based on the rms current analysis. Unitydc conversion ratio and square-wave mode operation is the optimal operating con-dition for the DAB and TAB converter. Furthermore, the small signal averagemodels for both the DAB and TAB converter are derived, based on the powerflow modeling and first harmonic model analysis. The system was simulated withICAP/SPICE and PSIM softwares under a variety of operating conditions, andthe results verified the power flow control methods.
Furthermore, a three-phase TAB converter has been proposed, aiming for high-power applications. The converter consists of three three-phase inverter stagesoperating in a high-frequency six-step mode. The advantages of the three-phaseversion compared with the single-phase one are the higher current handling capa-bility and much lower current ripple at the dc side, thereby a lower VA rating of thefilter capacitors owing to the interleaving effect of the three phases. The analysisof the topology and design issues of the transformer for both a conventionally anda coaxially wound structure have been presented.

64 Chapter 2. Triple-active-bridge converter

Chapter 3
Soft-switched TAB converter
1In the previous chapter we have elaborated on the three-port TAB topology,more specifically its modeling and simulation. This chapter details the switchingconditions of the TAB converter. A simple and effective duty ratio control methodis proposed to extend the ZVS operating range when input voltages vary widely.Soft-switching conditions over the full operating range are achievable by adjustingthe duty ratio of the voltage applied to the transformer winding in response tothe dc voltage variations at the port. Keeping the volt-second product (half-cyclevoltage-time integral) equal for all the windings leads to ZVS conditions over theentire operating range. A detailed analysis is provided for both the DAB andTAB converters. Typical applications can be found in fuel cell systems with asupercapacitor as the storage.
Furthermore, for the three-port converter a dual-PI-loop based control strategyis proposed to achieve constant output voltage, power flow management, and soft-switching. In addition, soft start-up methods for the DAB and TAB convertersare provided. The three-port converter is implemented and tested for a fuel celland supercapacitor system.
3.1 Introduction
For dc-dc power conversion, we have briefly described the DAB converter in Sec-tion 2.2. It has attractive features such as low device stresses, bidirectional powerflow, fixed-frequency operation, and utilization of the transformer leakage induc-tance as the energy transfer element. The main drawback of the DAB converter,however, is that it cannot handle a wide input voltage range (e.g., fuel cells and
1Part of this chapter has been (or to be) published in:
H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “A soft-switched three-port bidirec-tional converter for fuel cell and supercapacitor applications,”in Proc. IEEE Power ElectronicsSpecialists Conference (PESC’05), Recife, Brazil, Jun. 2005, pp. 2487–2493.
H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “Transformer-coupled multiportZVS bidirectional DC-DC converter with wide input range,” IEEE Trans. Power Electron., tobe published in 2008.
65

66 Chapter 3. Soft-switched TAB converter
supercapacitors). In such a case the soft-switching region of operation will besignificantly reduced [23], [24], [59], [63], [72]. Like the DAB converter, the TABconverter also does not maintain ZVS when wide voltage variations are present.
To extend the soft-switching operating range, an inductor can be paralleled tothe transformer; however, it will not extend the ZVS area to 100% [25]. References[25] and [26] have proposed a voltage cancellation method, effectively a form ofduty ratio control, along with phase shift control to extend the ZVS operatingregion. The method uses an offline calculated lookup table of the control angleswith the output current and voltage (V-I plane) as the look-up parameters. Thegoal is to control the delay angle of the firing signal of one of the bridge legs,and therefore the zero-crossing of the current, such that all the switches are soft-switched. However, the described method is complex to implement and equationsfor calculating the angles have not been published. Duty ratio control was alsoused in [52] for adjusting the amplitude of the fundamental component, but notexplicitly for extending the ZVS range. In addition, a phase shift plus PWMcontrol was applied to the DAB converter in [73], where the converter uses twohalf-bridges to generate asymmetrical waveforms in order to deal with the voltagevariation. However, for the multiport topologies, with this method only one portmay have a wide operating voltage because all the bridges operate at the sameduty ratio.
For the TAB converter duty ratio control can be used to compensate for volt-age variations at the ports. We propose that the duty ratio is imposed accordingto the operating voltage of the port, being inversely proportional [74]. In this waythe effective voltages (volt-second products) presented to the transformer wind-ings are equal (i.e., their half-cycle voltage-time integrals are equal). In multiporttopologies it is therefore possible to extend the ZVS operating range to the entireoperating region. Note that although both are a form of duty ratio control, theproposed method (keeping the volt-seconds equal) is different from the methodpresented in [25] and [26]. The way in which the duty ratio is controlled is essen-tially different.
An embodiment of the idea is a fuel cell system using a three-port converter.The implementation of a fuel cell system needs energy storage to improve thesystem dynamics. A supercapacitor has an advantage over batteries in termsof transient energy storage because it can be recharged and discharged virtuallyunlimited times, and the SOC of a supercapacitor is simply a function of thevoltage. However, the supercapacitor operating voltage varies widely comparedwith batteries. To keep ZVS, the supercapacitor bridge is controlled to generatea rectangular-pulse-wave voltage by shifting the gate control signals between thetwo legs of the bridge. The duty ratio of the resulting voltage is imposed accordingto the supercapacitor voltage in real-time.
Presented in the following sections are the ZVS analysis for the DAB andTAB converters, the system modeling, dual-PI-loop control strategy, soft start-upmethods, as well as simulation and experimental results.

3.2. Duty ratio control for the DAB topology 67
d = 1
d > 1
d < 1
v1
v2
i1
i1
i1
ϕ
d = V2 / (nV1)
Soft-switching Hard-switching
V1
V2''
tω
Figure 3.1: Switching condition of the DAB converter at different dc conversion ratios d.
3.2 Duty ratio control for the DAB topology
3.2.1 DAB converter with duty ratio control
The conventional DAB converter (see Fig. 2.2 on page 33) is able to operate withZVS in the entire phase shift range, provided that both the input and outputvoltages remain constant and equal when referred to the primary or secondary.However, the DAB converter suffers from a limited soft-switching range if theport dc voltages change dynamically in a relatively wide range [23], for instance,from 50% to 100% rated voltage. The switching condition of the DAB converterat different dc conversion ratios, d, is shown in Fig. 3.1. Fig. 3.2 plots the soft-switching (SS) region of the conventional DAB converter, showing the dependenceof the ZVS range on d. The power flow in the figure is expressed in p.u. asdefined in (2.3). For the V1-side bridge, hard-switching (HS) can occur whend > 1. Under idealized conditions2 the soft-switching operating range can becalculated by solving for the current at the switching instances (see Appendix C)and enforcing the ZVS constraints, i.e., a positive current through the outgoingpower switch. This is found to be
|ϕ| >π
2
(1 − 1
d
). (3.1)
2Idealized conditions mean ideal power switches and no parasitic circuit parameters.

68 Chapter 3. Soft-switched TAB converter
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Pow
er (
p.u
.)
d = 1.0
d = 1.5
d = 2.5
d = 0.5
d = 2.0
V1-side bridge
boundary
V2-side bridge
boundary
V1-side bridge
boundary
V2-side bridge
boundary
/ϕ π
SSHS
2
1
Vd
nV=
HS: hard-switchingSS: soft-switching
HS
SS
SS
HS
HSSS
Figure 3.2: Soft-switched operating region of the conventional DAB converter.
For the V2-side bridge hard-switching can occur when d < 1, and the soft-switchingoperating range is
|ϕ| >π
2(1 − d) . (3.2)
For a given d, the minimum operating phase shift which results in soft-switchingcan then be determined. Full control range under soft switching is achievable ford = 1. In general, the larger the phase shift, the better the switching condition.
In addition to the phase shift control, we introduce a simple duty ratio controlmethod to extend the ZVS range. The definition of the duty ratio is shown inFig. 3.3. It represents the pulse width of the rectangular-pulse-wave and has a valuebetween 0 and 1 (1 for square-wave). In the figure V2 and v2 are referred to theprimary side and represented by V
′
2 and v′
2, respectively. In Fig. 2.2 (on page 33)the voltage source V1 is assumed to be constant; thus, the V1-side bridge operatesin square-wave mode (i.e., D1 = 1), whereas V2 varies between its minimum voltageV2min and the maximum voltage V2max. We calculate the duty ratio as
D2 =V2min
V2. (3.3)
According to (3.3), the duty ratio is inversely proportional to the voltage. If V2
equals V2min, then D2 = 1. A larger value of V2 results in a smaller duty ratio.The transformer turns ratio n is chosen according to
n =N2
N1=
V2min
V1, (3.4)
where N1 and N2 are the numbers of turns of the primary and secondary windings,

3.2. Duty ratio control for the DAB topology 69
v2
L
v1
i1
V1
V2
Reference
v10.5π
tω0.5π
20.5 Dπϕ
2π
2Dπ tω
'
v2'
'
Figure 3.3: Fundamental model of the DAB converter with phase shift ϕ and duty ratiocontrol. D2 denotes the duty ratio of v
′
2.
respectively. Then, D2 can also be expressed as
D2 =nV1
V2. (3.5)
The phase shift ϕ, as shown in Fig. 3.3, is imposed with respect to the centralaxis of the voltage pulse (i.e., the phase shift between the fundamental compo-nents). The volt-second product is defined as the time integral of a half-cycle ofthe winding voltage. For a rectangular-pulse-wave voltage the integral simplifiesto the product of pulse duty ratio and amplitude (V ·D). It will be shown thatcontrolling the duty ratio of the voltage in order to keep the volt-second productsof the windings equal extends the ZVS operating range.
With duty ratio control, the operation of the converter is then divided intothe inner mode and outer mode (see Fig. 3.4, which is also described in [26]).To illustrate, Fig. 3.4 plots the idealized voltage and current waveforms (D2 =0.5). The ZVS condition can be simplified to the requirement that a positivecurrent flows through the outgoing switch3. The ZVS conditions are summarizedin Fig. 3.4.
3.2.2 Inner mode
The inner mode takes place when the phase shift is small and means that the spanof the voltage pulse v
′
2 is within v1. The inner mode occurs when |ϕ| < ϕB , whereϕB is the boundary between the inner and outer mode:
ϕB =π
2(1 − D2) . (3.6)
In this mode the current waveform i1 exhibits a double-pulse shape. As shownin Fig. 3.4(a), in the first half period (t0 to t3) v1 tends to increase the inductorcurrent while v
′
2 tends to decrease it. If the duty ratio D2 is controlled according
3This condition implies in no diode recovery losses. A secondary condition for ZVS is thatthe value of the switched current should be high enough to bring the voltage across the parasiticcapacitance of the complementary switch to zero.

70 Chapter 3. Soft-switched TAB converter
(a) Inner mode
(c) Left-outer mode
(b) Right-outer mode
t
v1v2
i1
0
0.5TT
t0 t1 t2 t3 t4 t5
t
v1v2
0
0.5TT
t0 t1 t2 t3 t4 t5
t
v1
v2 i1
0
T
t0 t1 t2 t3 t4 t5
i1
V1-side V2-side
ZVS conditions:
1 0
1 3
( ) 0
( ) 0
i t
i t
<⎧⎨
>⎩
1 1
1 2
1 4
1 5
( ) 0
( ) 0
( ) 0
( ) 0
i t
i t
i t
i t
>⎧⎪
<⎪⎨
<⎪⎪ >⎩
1 1
1 2
1 4
1 5
( ) 0
( ) 0
( ) 0
( ) 0
i t
i t
i t
i t
>⎧⎪
>⎪⎨
<⎪⎪ <⎩
1 1
1 2
1 4
1 5
( ) 0
( ) 0
( ) 0
( ) 0
i t
i t
i t
i t
<⎧⎪
<⎪⎨
>⎪⎪ >⎩
1 0
1 3
( ) 0
( ) 0
i t
i t
<⎧⎨
>⎩
1 0
1 3
( ) 0
( ) 0
i t
i t
<⎧⎨
>⎩
0.5T0.5T
0.5T
0.5T
0.5T
0.5T0.5T
'
'
'
Figure 3.4: Possible operation modes at different phase shifts: (a) inner mode, and(b) and (c) outer mode. The shaded areas represent the volt-seconds of v1
and v′
2.
to (3.5), the voltage-time integrals of v1 and v′
2 applied to the inductor L are equalfrom t0 to t3, that is
1
L
∫ t3
t0
(v1 − v
′
2
)dt =
T
2L
(V1 − V2D2
n
)= 0 = ∆i1. (3.7)
This is represented by the two shaded areas in Fig. 3.4(a). The difference betweenthe inductor current at the start and end of the half cycle is equal to zero. Further-more, since the inductor current is symmetrical, (that is, i1(t + 0.5T ) = −i1(t)),together we have
i1(t3) − i1(t0) = ∆i1 = 0,
i1(t3) = i1(t1 + 0.5T ) = −i1(t0).(3.8)
Solving the above equation gives
i1(t0) = i1(t3) = 0. (3.9)

3.2. Duty ratio control for the DAB topology 71
Therefore, in the idealized circuit the V1-side bridge is critically zero-currentswitched (ZCS). Taking into account that the previous analysis is based on theidealized circuit, in practice ZCS would be lost if there is any asymmetry of thevoltage-time integral balance between v1 and v
′
2.For the V2-side bridge, switching occurs at t1, t2, t4, and t5. On the basis
of (3.9), the current at the switching instants can be determined:
i1(t1) =V1
ωL(ϕ + ϕB) ,
i1(t2) =V1
ωL(ϕ − ϕB) .
(3.10)
Because |ϕ| < ϕB and the current is symmetrical, we can conclude that
i1(t1) > 0, i1(t4) = i1(t1 + 0.5T ) = −i1(t1) < 0;
i1(t2) < 0, i1(t5) = i1(t2 + 0.5T ) = −i1(t2) > 0.(3.11)
Therefore, the ZVS conditions are confirmed.
3.2.3 Outer mode
The right-outer mode (ϕ > ϕB) and left-outer mode (ϕ < −ϕB) occur when thephase shift is large. For Fig. 3.4(b), the analytical expressions for the current atthe commutating instants are calculated to be (see Appendix C)
i1(t0) = − V1
ωLD2(ϕ − ϕB) ,
i1(t1) =V1
ωL(ϕ − ϕB) ,
i1(t2) =V1
ωL(ϕ + ϕB) .
(3.12)
Because of the symmetry and the condition ϕ > ϕB , we have
i1(t0) < 0, i1(t3) = i1(t0 + 0.5T ) = −i1(t0) > 0;
i1(t1) > 0, i1(t4) = i1(t1 + 0.5T ) = −i1(t1) < 0;
i1(t2) > 0, i1(t5) = i1(t2 + 0.5T ) = −i1(t2) < 0.
(3.13)
Therefore, the ZVS conditions for both V1- and V2-side are met. For the left-outermode shown in Fig. 3.4(c), the same procedure applies and the conditions can alsobe verified.
Provided that the volt-second product of v1 is equal to that of v′
2, ZVS con-ditions are automatically achieved in the outer mode. In general, the switchingcondition is better in the outer mode than in the inner mode.
3.2.4 Power flow calculation
In the DAB converter, without duty ratio control the power flow is given by (2.2),showing a nonlinear dependency on the phase shift. With the proposed duty ratio

72 Chapter 3. Soft-switched TAB converter
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5
Pow
er (
p.u
.)
Only phase shift control: V2 = 2V2min , D2 = 1
Phase shift and duty ratio control: V2 = 2V2min , D2 = 0.5
V2 = V2min , D2 = 1
/ϕ π
Bϕ− Bϕ+
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Figure 3.5: Power flow versus phase shift in the DAB converter.
control method, the power flow is calculated to be
P =
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
V 21
D2ωL
(ϕ(1 − ϕ
π
)− π
4(1 − D2)
2)
if ϕ > ϕB
V 21
ωLϕ if − ϕB ≤ ϕ ≤ ϕB
V 21
D2ωL
(ϕ(1 +
ϕ
π
)+
π
4(1 − D2)
2)
if ϕ < −ϕB .
(3.14)
It is interesting to find that provided the transformer turns ratio is chosenaccording to (3.4) and the duty ratio is controlled by (3.5), the power flow foroperation in the inner mode is a linear function of phase shift, while the powerflow expression in the outer mode is nonlinear and complicated. Fig. 3.5 plots thepower versus phase shift at different duty ratios. Due to the duty ratio control,less power is transferred at a given phase shift compared with that in the DABconverter with only phase shift control. The power flow in the figure is expressedin p.u.
3.3 Duty ratio control for the TAB topology
3.3.1 TAB converter with duty ratio control
The proposed duty ratio control method is not ideally suited for the two-port DABconverter because it does not guarantee ZVS over the full range of operation (onlycritical ZCS in the inner mode). However, ZVS conditions can be achieved in thethree-port TAB converter. Fig. 3.6 shows the topology of the converter for fuel cell

3.3. Duty ratio control for the TAB topology 73
and supercapacitor applications and its simplified primary-referred ∆-equivalentmodel with bridges replaced by voltage sources. This configuration is identical tothe TAB converter described in Section 2.3. A detail to be pointed out here is thatwith ideal components (inductors), there could be a dc circulating current in thesystem shown in Fig. 3.6(b) caused by the initial conditions and asymmetrical volt-seconds balance during transients; however, in practice, the parasitic resistance ofthe inductors damps any transient dc circulating current.
With the proposed duty ratio control method, ZVS conditions may be achievedover the entire phase shift region. The voltages of the fuel cell and the load areassumed to remain constant because the load voltage VLoad is regulated and thefuel cell is supposed to operate at constant power hence at a near-fixed operatingvoltage VFC . However, the supercapacitor operating voltage varies widely. Dutyratio control is applied to the supercapacitor side. Since the fuel cell and load sidevoltages are near-constant,
D1 = D2 = 1. (3.15)
The transformer turns ratios,as indicated in Fig. 3.6, are chosen according to (incase of all full-bridges)
n2 =N2
N1=
VLoad
VFC
and n3 =N3
N1=
VSCmin
VFC
, (3.16)
where VSCmin is the minimum operating voltage of the supercapacitor; VLoad andVFC are the voltages of the fuel cell and the load, respectively. Then, duty ratioD3 is controlled by
D3 =VSCmin
VSC
, (3.17)
where VSC is the supercapacitor operating voltage. The primary-referred am-plitudes (peak values) of the voltages presented to the transformer and inductornetwork, as indicated in Fig. 3.6(c), are (for a full-bridge circuit) given by
V1 = VFC , V′
2 =VLoad
n2, and V
′
3 =VSC
n3. (3.18)
Therefore, the following is true:
V1D1 = V′
2D2 = V′
3D3. (3.19)
Hence, the volt-second products of the three voltages applied to the correspondingtransformer windings are equal. The reason why the converter is soft-switched liesin (3.19). This is explained as follows.
3.3.2 Analysis of ZVS conditions
Thanks to the ∆-model representation, the system analysis is significantly sim-plified. The three-port model is decomposed into three two-port models. Theidealized operating waveforms of the TAB converter are illustrated in Fig. 3.7.Note that the waveforms vary with the operating point.

74 Chapter 3. Soft-switched TAB converter
CS
C
L1
L2 L3
N2
v 3v 2
v 1
RL
i 1
i 2 i 3
Fuel
cell
Super
capac
itor
Load
i FC
i Lo
ad
i SC
VL
oa
d
VF
C
N1
N3
(a)
(b)
(c)
ϕ1
3
V2
V3
ωt
ωt
πD
3 2π
Ref
eren
ce
v 2 v 3
ϕ1
2
V1
ωt
v 1
β α
L1
2
L3
1L
23
i 12
, P
12
i23 ,
P23
i 31 ,
P 31
i 1i' 2
i' 3
v 1
v' 3
v' 2P
1
P3
P2
+
+
Port
1
Port
2
Port
3
VS
C
CL
i P1
i P2
i P3
Pow
er f
low
P1
P2 P3
PF
C
PS
C
PL
oa
d
PF
C =
P1
PL
oa
d =
-P
2
PS
C =
P3
'
πD
1
πD
2
π0.5
'
'
'
Figure 3.6: TAB converter for fuel cell and supercapacitor application, showing (a) theTAB topology, (b) primary-referred ∆-equivalent model, and (c) voltagesgenerated by the three bridges. The voltages generated by the three bridgesare shifted with ϕ12 and ϕ13 with v1 as the reference. The angles α and βare defined for control purposes. The currents i
′
2, i′
3 and the voltages v′
2,v′
3 represent the primary-referred values of i2, i3, v2, and v3, respectively.

3.3. Duty ratio control for the TAB topology 75
t
Hard-
switching
Soft-
switching
t0t1 t2 t3 t4t5 t6 t7
Without duty
ratio control
With duty
ratio control
ZVS
conditions:
1 0
1 4
( ) 0
( ) 0
i t
i t
<⎧⎨
>⎩
'
2 1
'
2 5
( ) 0
( ) 0
i t
i t
⎧ <⎪⎨
>⎪⎩
'
3 2
'
3 3
'
3 6
'
3 7
( ) 0
( ) 0
( ) 0
( ) 0
i t
i t
i t
i t
⎧ <⎪
>⎪⎨
>⎪⎪ <⎩
v1
v2
v3
i12
i31
i23
i1
i2
i3
'
'
'
'
Figure 3.7: Idealized steady-state operating waveforms of the TAB converter with andwithout duty ratio control in both-inner mode (D3 = 0.5, ϕ12 = 0.1π,ϕ13 = 0.05π, L12 = L23 = L31).
The ZVS condition for each bridge depends on the magnitudes of the currentsat the switching instants. This is summarized in Fig. 3.7, in other words, negativecurrents at the v1, v
′
2, and v′
3 rising edges and positive currents at their fallingedges. According to the definitions of the reference direction in Fig. 3.6(b), theinstantaneous currents in the three branches are given by
i1 (t) = i12 (t) − i31 (t) ,
i′
2 (t) = i23 (t) − i12 (t) ,
i′
3 (t) = i31 (t) − i23 (t) .
(3.20)
Based on the analysis of the two-port topology, i31 and i23 will be exactly equalto zero at the switching (commutating) instants of v1 and v
′
2 under idealized con-

76 Chapter 3. Soft-switched TAB converter
ditions (both-inner mode), i.e.,
i31(t0) = i31(t4) = 0,
i23(t1) = i23(t5) = 0.(3.21)
The voltage v1 (fuel cell side) switches at t0 and t4, while at these two instantsi31 equals zero. Therefore, the current of the fuel cell side bridge at the switchinginstants is
i1(t0) = i12(t0) − i31(t0) = i12(t0),
i1(t4) = i12(t4) − i31(t4) = i12(t4).(3.22)
So, i31 does not contribute to the ZVS condition of the bridge nor does it make theswitching condition worse. The turn-off current of the bridge is only determinedby i12 in the case shown. Because VFC is assumed to be equal to VLoad/n2, thefuel cell side bridge is switched at zero-voltage in the entire phase shift region, asthe optimal case (d = 1) in the DAB converter [23].
An equivalent situation occurs at the load side bridge. For the supercapacitorside bridge, it switches under better ZVS conditions than the fuel cell and the loadside bridges because both i23 and i31 contribute current to drive the soft-switchedtransition, as can be seen at t2, t3, t6, and t7 in Fig. 3.7. In other words, both ofthem provide positive current for MOSFETs at turn-off.
For comparison, without duty ratio control hard-switching occurs at both thefuel cell and the load side bridge, as shown in Fig. 3.7 (dashed lines). With theproposed method, the inductors are prevented from being over-charged, and thecurrents are forced to keep a reasonable amplitude.
Similarly, other operating modes such as a combination of the inner and outermode, or both-outer mode can be analyzed based on the results from the two-port topology. All of them switch under better ZVS conditions than the both-inner mode operation because based on the analysis of the two-port converter allthe three currents i12, i23, and i31 contribute to soft-switching at the switchinginstants. In brief, provided that the current through each branch satisfies the ZVScondition, the combined current in two branches certainly assures ZVS operation.The worst case happens when both ϕ12 and ϕ13 equal zero. No real power wouldbe transferred in this situation and two of the three bridges would be switched atzero-current in the ideal circuit.
In the practical circuit the MOSFET drain-source capacitance and the mag-netizing inductance of the transformer have to be considered. The MOSFETcapacitance requires a minimum turn-off current and it reduces the soft-switchedoperating region. On the other hand, the magnetizing inductance will increasethe soft-switching region and to some extent compensates for the impact of theMOSFET capacitance [24].
3.3.3 Extension of duty ratio control
In fact, fuel cells have a reasonably wide operating voltage ranging from about50% to 100% depending on the output power. If the fuel cell needs to be oper-ated at different power levels, a duty ratio control method like the one for the

3.4. Control strategy for the fuel cell and supercapacitor system 77
supercapacitor can be applied to the fuel cell side:
D1 =VFCmin
VFC
, D2 = 1, and D3 =VSCmin
VSC
, (3.23)
where VFCmin is the minimum operating voltage of the fuel cell. The transformerturns ratios are then chosen according to the minimum operating voltages, i.e.,
n2 =N2
N1=
VLoad
VFCmin
and n3 =N3
N1=
VSCmin
VFCmin
. (3.24)
In this operation mode, the worst case happens when, at light load, the super-capacitor voltage reaches its maximum. In this situation the load side bridgetheoretically operates at critical ZCS condition.
In summary, because of the combination of currents in the three bridges theproposed duty ratio control is effective in achieving ZVS in the three-port TABtopology. However, when a wide operating voltage of the supercapacitor is desired,the method complicates the control and increases the rms current compared withthe fuel cell system with battery storage. Nevertheless, the proposed duty ratiocontrol method is a simple and effective way to achieve ZVS for all the switches.Another possibility to interface the supercapacitor to the TAB topology is to insertan extra bidirectional conversion stage between the supercapacitor and the TABconverter. However, this two-stage conversion increases the system complexityand the losses in the extra conversion stage are then to be considered as well.
3.4 Control strategy for the fuel cell and supercapac-itor system
The proposed control scheme has two PI feedback loops. The scheme aims toregulate both the output voltage VLoad and fuel cell power PFC at the same time.The dual-PI-loop control structure described in Section 2.5.2 is adopted here.According to Fig. 3.6(c), there are three control variables, namely ϕ12, ϕ13, andD3. Fig. 3.8 shows the DSP-based control scheme, where V ∗
Load and P ∗FC are the
references for the output voltage and the fuel cell power, respectively. The outputvoltage VLoad is regulated by ϕ12. Regulation of ϕ13 keeps the fuel cell power atthe desired value. The adjustment of D3 achieves ZVS. Since the supercapacitorvoltage varies very slowly compared with the switching frequency, the duty ratiois nearly constant during many switching cycles.
Note that the control of D3 is not intended to regulate the power flow. If thephase shifts were kept unchanged, the power flow in the system would vary whenD3 changes (see Fig. 3.5). In closed-loop operation, however, the power flow canbe kept unchanged since the controller automatically adjusts the operating phaseshifts in response to the change of the supercapacitor voltage. The change of theduty ratio D3 may be viewed as a very slow disturbance to the control system.
For the implementation of the control scheme it should be noted that ϕ13 isnot adjusted directly. Instead, as defined in Fig. 3.6(c), shift angles α and β are

78 Chapter 3. Soft-switched TAB converter
PI
PFC
VFC
IFC
Multiply Filter
Limiter
VSC
DSP
iFC
LPF
Phase-
shifted
square-
wave
generator
SOC
manager
PI
VLoad
( )13 312
Dπ
α ϕ= − −
3SCmin
SC
VD
V=
( )13 31
2D
πβ ϕ= + −
ϕ12
αϕ13
β
VFCVSC
VLoad
D3
PFC
+
+
-
-
PWM1
PWM2
PWM3
PWM4
PWM5
PWM6
T1PWM
T2PWM
FC
SC
Lo
adThree-port
TAB
converter
VLoad
PFC*
*
PFC**
Figure 3.8: Control scheme for the three-port TAB converter in fuel cell and superca-pacitor applications.
calculated by the DSP. They are found to be
α = ϕ13 − π
2(1 − D3) ,
β = ϕ13 +π
2(1 − D3) .
(3.25)
Note that the supercapacitor power is not controlled directly. The superca-pacitor sinks or sources the balance of power between the fuel cell and the loadautomatically. A SOC manager monitors VSC . For instance, when the superca-pacitor voltage approaches the maximum or minimum limiting voltage, the SOCmanager slightly adjusts the fuel cell power reference. In this way the controlcircuit is capable of charging or discharging the supercapacitor with an averagecurrent:
ISC = − (P ∗∗FC − PLoad − PLoss) /VSC , (3.26)
where ISC is the average discharging current, P ∗∗FC is the power reference given by
the SOC manager, and PLoss is the estimated total system loss. The algorithmfor the SOC management will be described in Section 8.8.2.
3.5 System modeling
3.5.1 Duty ratio controlled DAB converter
When controlled by phase shift and duty ratio, the power flow expression for theDAB converter is more complicated than for the situation with only phase shiftcontrol. Based on (3.14), the average current for the load side can be expressed as

3.5. System modeling 79
(see also Fig. 2.21 on page 50)
IP2 =
⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
− V1
nωL
(ϕ(1 − ϕ
π
)− π
4(1 − D2)
2)
if ϕ > ϕB
−V1D2
nωLϕ if − ϕB ϕ ϕB
− V1
nωL
(ϕ(1 +
ϕ
π
)+
π
4(1 − D2)
2)
if ϕ < −ϕB .
(3.27)
The same approach as used in Section 2.8.1 is adopted to calculate the small signalgain:
Go =dIP2
dϕ
∣∣∣∣ϕo
=
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
− V1
nωL
(1 − 2
πϕo
)if ϕo > ϕB
−V1D2
nωLif − ϕB ϕo ϕB
− V1
nωL
(1 +
2
πϕo
)if ϕo < −ϕB ,
(3.28)
where ϕo is the operating point. As mentioned in Section 3.2.4, in the inner modethe power flow is proportional to the phase shift. This means that the system gainGo is not related to the operating point, whereas Go is influenced by the operatingpoint when operating in the outer mode. The control strategy for the conventionalDAB converter (see Section 2.8.1) can be applied to the duty ratio controlled DABconverter. The only difference is that the gain of the converter changes.
The first harmonic approach described in Section 2.8.3 can also be used forthe average model. Suppose that duty ratio control is applied to the V2-side. Thepeak values of the fundamental components of v1 and v2 can be expressed as
Vf1 =4
πV1 and Vf2 =
4
πV2 cos
((1 − D2) π
2
). (3.29)
By using the same procedure in Section 2.8.3, the small signal gain of DAB con-verter can be derived as
Go = − 8V1
π2nωLcos
((1 − D2) π
2
)cos ϕo. (3.30)
3.5.2 Duty ratio controlled TAB converter
For the duty ratio controlled TAB converter, the small signal average model can bederived in the same way as the method used in Section 2.8.2. The TAB convertergain matrix Go becomes a function of the phase shifts and the duty ratio:
Go = f(ϕ12o, ϕ13o, D3o). (3.31)
For a given operating point (ϕ12o, ϕ13o, D3o), Go can be calculated.

80 Chapter 3. Soft-switched TAB converter
The average currents at the power ports (IP1, IP2, and IP3) are functions ofthe two phase shifts, and are given by (see also Fig. 2.23 on page 51)
IP1 = f1(ϕ12, ϕ13) =P1
V1,
IP2 = f2(ϕ12, ϕ13) =P2
V2,
IP3 = f3(ϕ12, ϕ13) =P3
V3.
(3.32)
P1, P2, and P3 are functions of the two phase shifts ϕ12 and ϕ13. Note thatD3 is not regarded as a variable in the above equations because it changes veryslowly and is not used to control the power flow. The current source functions arenonlinear except for the inner mode, and thus should be linearized at the operatingpoint. The factors of this linearization are derived by partial differentiation:
G11 =∂IP2
∂ϕ12
∣∣∣∣(ϕ12o,ϕ13o,D3o)
G12 =∂IP2
∂ϕ13
∣∣∣∣(ϕ12o,ϕ13o,D3o)
G21 =∂IP1
∂ϕ12
∣∣∣∣(ϕ12o,ϕ13o,D3o)
G22 =∂IP1
∂ϕ13
∣∣∣∣(ϕ12o,ϕ13o,D3o)
.
(3.33)
By using (2.6), (3.14), and (3.32), the linearized form of the average current ateach port can be obtained. The method is the same as described in Section 2.8.2.However, the gain expressions are more complex than for the situation with onlyphase shift control.
Again, we can also use the first harmonic model to analyze the TAB converterin case of duty ratio control. The duty ratio control is applied at the V3 (superca-pacitor) side. The peak values of the fundamental voltages are
Vf1 =4
πV1, Vf2 =
4
πV2, and Vf3 =
4
πV3 cos
((1 − D3) π
2
). (3.34)
By using the same procedure in Section 2.8.3, the components of the small signalgain matrix of the TAB converter with duty ratio control can be derived as
G11 = − 8V3
π2n2n3ωL23cos
((1 − D3) π
2
)cos (ϕ13o − ϕ12o) − 8V1
π2n2ωL12cos ϕ12o,
G12 =8V3
π2n2n3ωL23cos
((1 − D3) π
2
)cos (ϕ13o − ϕ12o) ,
G21 =8V2
π2n2ωL12cos ϕ12o,
G22 =8V3
π2n3ωL31cos
((1 − D3) π
2
)cos ϕ13o.
(3.35)Because the port voltage is regarded as constant in the modeling process, the
power is equal to the average current times the port voltage.
PFC = P1 = V1IP1H1(s). (3.36)

3.5. System modeling 81
KM+
−G11
KF2
KM
G21
G12
G22+
−
KF1
++
+
+-1
12ϕ%
13ϕ%
2PI%
1PI%
Gc2(s)
Gc1(s)
H2(s)
V1H1(s)FCP%
LoadV%
**
FCP%
*
LoadV%
Figure 3.9: Control loop block diagram of the TAB converter.
The control loop block diagram of the TAB converter is shown in Fig. 3.9,where KF1 = 1 and KF2 = 1 are the feedback gains and KM = π/3750 is the gainof the DSP phase shift modulator. Gc1(s) and Gc2(s) are the transfer functions ofthe PI controllers:
Gc1(s) = K11 + τ1s
τ1sand Gc2(s) = K2
1 + τ2s
τ2s, (3.37)
where K1 = 1 and K2 = 50 are the proportional gains and τ1 = 0.5 ms andτ2 = 0.2 ms are the time constants. The two PI compensators are then discretizedand implemented with the DSP. In the control loop block diagram, H1(s) is thetransfer function of the LPF which filters out HF components in iFC :
H1(s) =1
1 + τIs, (3.38)
where τI = 1 ms is the time constant of the filter. H2(s) is the transfer functionof the output capacitor and load (supposed to be purely resistive):
H2(s) =RL
1 + RLCLs, (3.39)
where RL is the resistance of the load and CL = 50 µF is the capacitance of theoutput filter capacitor.
The averaged model (3.32) (see also Fig. 2.23 on page 51) was simulated withMatlab/Simulink. The simulation results of the system response to step loadchanges are shown in Fig. 3.10. As shown, the fuel cell power stays constant afterthe short transitions, while the load pulsates between 1 kW and 2 kW in a timeinterval of 10 ms. The results can be compared with the circuit-based simulationin Fig. 3.19. Good correlation is found between the two simulation results.

82 Chapter 3. Soft-switched TAB converter
0.04 0.045 0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.090
500
1000
1500
2000
0.04 0.045 0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09500
1000
1500
2000
2500
0.04 0.045 0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09-500
0
500
1000
1500
Pow
er (
W)
Pow
er (
W)
Pow
er (
W)
Time (s)
PFC
PLoad
PSC
Figure 3.10: Simulation results of power flow control in the TAB converter based onthe averaged model with the dual-PI-loop control scheme.
3.5.3 Decoupling of the two control loops
For the TAB converter the main control variables ϕ12 and ϕ13 control the powerflow in the system. In other words, two degrees of freedom are available for thesystem control. Not surprisingly, the two PI control loops are coupled and influenceeach other as can be seen from Fig. 3.9. The bandwidth of the output voltagecontrol loop GVϕ12
(s) is set higher than that of the power control loop GPϕ13(s)
in order to guarantee a fast response to variations in load. In this manner theinteraction can be minimized. On the other hand, the regulation of the fuel cellpower need not to be as fast as the regulation of the output voltage. Therefore,one can regard the former controller as the master and the latter as the slave. Thisdecoupling method is straightforward to implement. Fig. 3.11 plots the open-loopBode plot of the two control loops, showing different crossover frequencies. Thebandwidth of the control loop GPϕ13
(s) could be somewhat higher than the shownone in order to improve the dynamics of the power control loop. The plottedtransfer functions, using the parameters given above, are (see also Fig. 3.9):
GV ϕ12(s) = −KF2KMG11H2(s)Gc2(s),
GPϕ13(s) = KF1KMV1G22H1(s)Gc1(s).
(3.40)
In general, a five to ten times ratio between the two cross-over frequenciesshould be assured to minimize the interaction effects. Parameters for the controlsystem are listed in Table 3.4.
A future improvement could employ a decoupling network, which eliminatesthe interaction effects as also briefly mentioned in [52]. In theory, the decoupling

3.6. Implementation issues 83
Frequency (Hz)
100 101 102 103 104 105
13PG ϕ
-60
-40
-20
0
20
40
60
80
100
120
12VG ϕ
Gai
n (
dB
)
Figure 3.11: Bode plot showing the open-loop gains of the system.
matrix D is the inverse of the TAB converter small signal gain matrix Go:
D =
[D11 D12
D21 D22
]= G−1
o=
[G11 G12
G21 G22
]−1
=1
G11G22 − G12G21
[G22 −G12
−G21 G11
].
(3.41)Therefore, the total system gain matrix becomes diagonal, that is[
IP2
IP1
]= GoD
[ϕo
12
ϕo13
]=
[1 00 1
] [ϕo
12
ϕo13
]=
[ϕo
12
ϕo13
], (3.42)
where ϕo12 and ϕo
13 are the outputs of the PI controllers (see Fig. 3.12). Theinteraction is thereby eliminated and the system can be controlled as two single-input single-output (SISO) systems.
Although elegant in nature, the decoupling network needs more computationalpower and requires real-time updating of the gain matrix Go. It should also benoticed that the delay between the control/gating signals and the actual voltagesapplied to the transformer has to be taken into account because this affects theoperating point (the actual phase shifts) which directly influences the gain of theconverter. Without this measure, the system cannot be satisfactorily decoupled.The decoupled control is depicted in Fig. 3.12.
3.6 Implementation issues
3.6.1 DSP implementation
The proposed control scheme of Fig. 3.8 for the TAB converter is relatively simpleto implement with a DSP. A DSP-based implementation of the control schemeoffers great flexibility and increased insensitivity to temperature drift. The TexasInstruments (TI) C2000 family of digital signal controllers provides a number of

84 Chapter 3. Soft-switched TAB converter
Gc2(s)
KF1
+-
*
LoadV% LoadV%
FCP%
G11
G21
G12
G22+
+
+
+-1
12ϕ%
13ϕ%
2PI%
1PI%
H2(s)
V1H1(s)
D11
D21
D12
D22+
+
+
+
Gc1(s)+
-
**
FCP%
KF2
12
oϕ%
13
oϕ%
D Go
Figure 3.12: Decoupled control of the TAB converter.
Table 3.1: Comparison of Texas Instruments C2000 family DSPs
TMS320LF2407 TMS320F2812 TMS320F2808CPU frequency 40 MHz 150 MHz 100 MHzCPU core C24x 16-bit C28x 32-bit C28x 32-bitPWM channels 16 (2 EVs) 16 (2 EVs) 16 (6 modules)ADC channels 16-ch, 10-bit 16-ch, 12-bit 16-ch, 12-bitADC conversion time 500 ns 80 ns 160 ns
highly integrated, control-optimized peripherals and is easy to use. Table 3.1 givesa list of the three types of DSPs that were used for prototyping. The older 2407controller has a 16-bit architecture that offers 40 million instructions per second(MIPS). The 2812 controller is a 32-bit DSP-based controller with a performanceof 150 MIPS. The 2808 controller is a member of the newest family based onthe 32-bit 28x core with updated peripherals including enhanced PWM modules,high-resolution PWM, etc.
The TAB converter control system was first implemented with the 2407 con-troller and then migrated to the 2812 controller because of its higher CPU fre-quency and shorter analog-to-digital conversion time. The 2812 DSP system has16 PWM output channels, offers several communication capabilities, and containsa 12-bit analog-to-digital converter (ADC) with a minimum conversion time of80 ns that offers up to 16 analog input channels. The auto sequencing capabil-ity of the ADC allows a maximum of 16 conversions to take place in a singleconversion session without any CPU overhead. Furthermore, the processor hastwo event managers (EVs), which can each accomplish a task such as centeredand/or edge-aligned PWM generation, programmable dead band, and synchro-nized analog-to-digital conversion.
Fig. 3.13 shows the system structure implemented with the TMS320F2812 or

3.6. Implementation issues 85
L1
L2
L3
FC
SC
Load
+
iFC
PW
M1
PW
M2
PW
M3
PW
M4
PW
M5
PW
M6
T2PWM
TMS320F2812 DSP
T1PWM
VSC
VLoad
VFC
ADCIN3
ADCIN2
ADCIN0
ADCIN1
+
Figure 3.13: TMS320F2812 DSP implementation of the TAB converter (see alsoFig. 3.8).
TMS320LF2407 controller (their peripherals are compatible). In the first proto-type, the fuel cell side and load side bridges were implemented with half-bridgesbecause they operate in square-wave mode4. In Fig. 3.8 the inputs of the DSPare four sampled real-time operation parameters: VLoad, VSC , VFC , and iFC , andthe outputs are the three shift angles: ϕ12, α, and β. By programming the eventmanager of the DSP with these three shift angles, phase-shifted PWM signals canbe generated for each bridge. To implement the proposed control scheme, onlyevent manager A (EVA) of the DSP is used. Eight PWM signals (4 pairs) aregenerated by programming EVA in the interrupt routines. Four ADC channelssample the circuit operating parameters.
Fig. 3.14 illustrates the realization of the phase shifts by the DSP. A phase-shifted square-wave for each PWM output is achieved by updating the compareregisters (CMPRx) with the phase shift values (PS), which are calculated by thedigital PI algorithm, every half cycle in the interrupt routines (plus or minus PS).Timer1 is programmed to be in continuously up-down counting mode. PWM1 isused as the reference for all the output signals and its compare register is loadedwith half of the timer1 period value and kept unchanged. The shift angles of thePWM signals are updated every cycle. With the TMS320F280x DSP, the digitalphase shift can be directly programmed. This further simplifies the implementa-tion.
3.6.2 Digital PI controllers
The PI controllers should be discretized in order to be implementable by theDSP. The backward Euler method provides an easy way to discretize an analog
4Both half-bridge and full-bridge circuit can produce a square-wave voltage. Therefore, bothof them can be used for the square-wave mode of operation.

86 Chapter 3. Soft-switched TAB converter
PWMx
Timer1
CMPRx = Timer1_Half + PS CMPRx = Timer1_Half - PS
Timer1_Half
Reference:
PWM1
Phase shift (PS)
Period
Underflow
Interrupts
PWMx = PWM 2, 3, 4, 5, 6, T1PWM, and T2PWM
Figure 3.14: Realization of the phase shifts by the DSP.
controller [75], simply by a substitution
s =1 − z−1
TS
, (3.43)
where TS is the sampling period. The two PI controllers are then discretized as
Gc1(z) = K1 +K1TS
τ1(1 − z−1),
Gc2(z) = K2 +K2TS
τ2(1 − z−1).
(3.44)
This can be written as difference expressions:
y1(k) = y1(k − 1) + (K1 + K1TS/τ1) u1(k) − K1u1(k − 1),
y2(k) = y2(k − 1) + (K2 + K2TS/τ2) u2(k) − K2u2(k − 1).(3.45)
where u1(k) and u2(k) are the inputs, y1(k) and y1(k) are the outputs.The digital PI algorithm can easily be implemented with the DSP, requiring
only a few clock cycles to execute. However, due to the computation (and sam-pling) delay and, therefore, lower attainable control bandwidth, digital controllersare often inferior compared with their analog counterparts in terms of system dy-namics and stability. When designing the controller, the delay of the sample andhold, TS/2, should be taken into account. The phase margin of the control loopneeds to be increased in order to ensure the stability. In fact, the discretizationprocess warps the frequency response of the controller at the region close to thesampling frequency. Therefore, at least one decade (as a rule of thumb) should betaken between the sampling frequency and the control loop cross-over frequency[76]. Usually, the sampling frequency is set to be equal to or twice the switching

3.6. Implementation issues 87
Kp Ki
Kd
Kc
dt∫
+-
+
++
-
Ref.
Feedback
yu
d
dt
++
+
up
ui
uduc
Figure 3.15: PID Controller with anti-windup [78], where Kp is the proportional gain,Ki is the integral gain, Kd is the derivative gain, Kc is the integral cor-rection gain of the PID controller.
frequency. However, in order to avoid aliasing errors, it is very important thatsampling is synchronized with switching. Also, the sampling point should avoidthe switching instants because of possible oscillations in the waveform [77]. Inaddition, an anti-windup mechanism (as shown in Fig. 3.15 [78] for a general PIDcontroller) should also be included in the algorithm to avoid the saturation ofthe integrator during large transients [76]. Digital implementation issues will bediscussed further in Section 8.8.
3.6.3 Magnetic components design
Three-winding transformer design
The transformer is the core component of the TAB converter, providing isolationand voltage matching. When the switching frequency is fixed, the power flowthrough the transformer is related to the phase shifts and the leakage inductances.A smaller leakage inductance leads to a smaller phase shift while transferring thesame amount of power. Therefore, the leakage and external inductances shouldbe designed according to the desired operating phase shift at the required powerthroughput. The leakage inductance of the transformer is usually too small. Thus,external inductors are used. It is possible to integrate the external inductorsinto the transformer – a transformer having a relatively large leakage inductance.However, such a transformer is difficult to build, and the size would not be smallerthan a normal transformer. Problems like localized over-heating of the magneticcore caused by the leakage flux have to be carefully considered. For this reason,external inductors were used in the implementation.
The design parameters of the 1 kW transformer are listed in Table 3.2. Tomatch the three dc voltages at the ports, the transformer turns were selected asN1 : N2 : N3 = 5 : 38 : 4. This results in a maximum operating flux density of0.125 T. For 20 kHz, the flux density could be higher by reducing the turns of allthe windings. However, this may have the problem of matching the port voltages(the turn numbers should be integers).
The loss of the transformer was calculated with the Magtool software (Philips’proprietary). Because the current waveforms are not sinusoidal, the waveform

88 Chapter 3. Soft-switched TAB converter
Table 3.2: 1 kW three-winding transformer design parameters
Description ParametersNominal operating conditions P1 = 1 kW, P2 = -1 kW, P3 = 0 kWOperating point ϕ12o = 26o, ϕ13o = 13o
Operating frequency 20 kHzTransformer turns N1 : N2 : N3 = 5 : 38 : 4Magnetic core shape E65/32/27Core material Fi324Air gap 0.136 mmMaximum operating flux density 0.125 TCross section area Ae = 540 mm2
Winding area Aw = 394 mm2
Window area As = 537 mm2
Wire type Litz wire 160*71 µmPrimary winding 10 wires in parallelSecondary winding 2 wires in parallelTertiary winding 13 wires in parallelPrimary leakage inductance Ls1 = 0.36 µHSecondary leakage inductance Ls2 = 0.87 µHTertiary leakage inductance Ls3 = 0.27 µHPrimary resistance Rs1 = 12 mΩSecondary resistance Rs2 = 350 mΩTertiary resistance Rs3 = 8 mΩMagnetizing inductance (primary) LM = 84 µH
data were imported from SPICE/ICAP simulation results over one steady-stateswitching cycle. Losses at the maximum load were estimated by Magtool and areshown in Fig. 3.16. As can be seen, the winding rms loss is dominant. The designis a compromise of several practical factors, for example, the available magneticcores and wire types at hand (thereby the turns per layer). For 20 kHz, the strandsof the litz wire of 71 µm is small. It could be larger.
Fig. 3.17 shows the winding layout of the transformer. The innermost windingis for the fuel cell side; in the middle is the load side winding; and the superca-pacitor side winding is the outermost.
Inductance values
If a load profile of no load to double nominal load is desired, the power rating ofall the three ports can be designed to be equal. For this purpose the inductancesof the three inductors in the ∆-model, L12, L23, and L31 (see Fig. 3.6(b)), shouldbe equal. Because of the described layout of the transformer, the coupling factorsbetween the three windings are not the same. The external inductors can beadjusted to equalize the total primary-referred inductances of the three ports.The required inductances for L1, L2, and L3 (including the leakage inductances)

3.6. Implementation issues 89
Figure 3.16: Transformer loss calculated by Magtool (Philips’ proprietary).
Primary
Secondary
Tertiary Primary
Secondary
Tertiary
AwAs Winding areaWindow area
Figure 3.17: Layout of the 1 kW three-winding transformer.

90 Chapter 3. Soft-switched TAB converter
Table 3.3: Parameters for the external inductors
L1 L2 L3
Total inductance 1.15 µH 65.2 µH 0.723 µHTransformer leakage 0.36 µH 0.87 µH 0.27 µHRequired inductance 0.79 µH 65.1 µH 0.453 µHCore shape ETD ETD ETDNumber of turns 4 28 3Wire type Litz 160*71 µm Litz 160*71 µm Litz 160*71 µmWires in parallel 10 3 13
are calculated with the ∆- to T-model conversion equations (see Appendix A),while taking the magnetizing inductance into account. In order to have an equalinductance value in the ∆-model: L12 = L23 = L31 = 3.5 µH, Table 3.3 lists therequired external inductances. These values are used for simulation.
The inductance L3 determines the maximum transient power the supercapaci-tor port can supply. Because a smaller inductance results in a higher peak current,the higher transient power the port can supply, the higher peak current in normaloperation. In the ∆-model, the inductances L12, L23, and L31 could be different.However, it is important to keep the inductances L31 and L23 equal. In this way,ϕ13 = 0.5ϕ12 results in a zero power from the supercapacitor port. In the actualprototype the storage port has a higher inductance than the calculated value.
3.7 Simulation and experimental results
3.7.1 Simulation results
The TAB converter in Fig. 3.6 and the control scheme in Fig. 3.8 were simulatedwith PSIM7.0. Parameters for the simulation and design are listed in Table 3.4.Note that the fuel cell and load side bridges were implemented with half-bridges.Fig. 3.18 shows the simulation waveforms of the voltages and currents in the threebridges in the cases of (a) a large (D3 = 1) and (b) a small (D3 = 0.5) dutyratio. For comparison, Fig. 3.18(c) demonstrates hard-switching without dutyratio control. As can be seen from Fig. 3.18(a) and (b), all the three bridgesare soft-switched. The phase shifts are ϕ12 = 0.1π, ϕ13 = 0.05π for both cases,which results in an average zero power flow from the supercapacitor (standbymode). Note that all waveforms are referred to the primary and current waveformsare scaled. It is noticeable that when the duty ratio approaches 1, the currentwaveforms become smoother. On the contrary, in Fig. 3.18(c), without duty ratiocontrol hard-switching occurs in two of the three bridges and the peak current isalso much higher, where the operating parameters are the same as in the case ofFig. 3.18(b).
To verify the dual-PI-loop control scheme, Fig. 3.19 illustrates the power flowin the system in closed-loop operation using the controller parameters listed in

3.7. Simulation and experimental results 91
(a)
(b)
v1
i1/2
v'2
v'3
i'2/2
i'3/4
v1 i1/2
v'2 i'2/2
v1
v'2
v'3
i1/2
i'2/2
i'3/4
v'3 i'3/4
v1 i1/2
v'2 i
'2/2
v'3 i'3/4
v1
v'2
v'3
Soft-switching Hard-switching
i1/2
i'2/2
i'3/4
v1 i1/2
v'2 i'2/2
v'3 i'3/4
(c)
Figure 3.18: Simulation results of the TAB converter in Fig. 3.6 at ϕ12 = 0.1π andϕ13 = 0.05π, showing soft-switching with duty ratio control (a) D3 = 1and (b) D3 = 0.5, and (c) hard-switching when not using duty ratiocontrol at port 3 (the supercapacitor port).

92 Chapter 3. Soft-switched TAB converter
Table 3.4: Design parameters for the fuel cell and supercapacitor system
Description Symbol ValueFuel cell voltage VFC 54 VLoad side dc voltage VLoad 400 VSupercapacitor voltage VSC 21 V to 42 V (50% to 100%)Switching frequency fs 20 kHzLoad power PLoad 1 kW maximumFuel cell power PFC 1 kW maximumPI controller Gc1(s) K1, τ1 K1 = 1, τ1 = 0.5 msPI controller Gc2(s) K2, τ2 K2 = 50, τ2 = 0.2 msLPF time constant τI τI = 1.0 msModulator gain KM π/3750Feedback gain KF1 1Feedback gain KF2 1Nominal load resistance RL 160 ΩOutput filter capacitor CL 50 µFUsed DSP TMS320F2812
PFC
PLoad
PSC
(W)
(W)
(W)
Figure 3.19: Simulation results of the power flow control with the dual-PI-loop controlscheme in response to step changes in the load.
Table 3.4, showing the step changes in the load (between 1 kW and 2 kW) ina time interval of 10 ms, while the fuel cell power remains constant after thetransitions.
It is advisable not to set the duty ratio D3 less than 0.5. Otherwise the higherpeak current will decrease the efficiency. As shown in Fig. 3.20, the minimum

3.7. Simulation and experimental results 93
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
D3
ESC
D3 ESC
(p.u.)
Supercapacitor voltage (p.u.)
Figure 3.20: Energy stored in the supercapacitor (ESC) and the duty ratio of v3 (D3)versus the supercapacitor operating voltage. Note that the units are nor-malized (p.u.) and the shadowed area is the normal operation regionwhere ZVS can be achieved.
supercapacitor voltage can be set to half of the rated/maximum voltage, i.e., aminimum duty ratio of 0.5. From the energy point of view, three quarters ofthe energy storage capacity of the supercapacitor is utilized because the energy isproportional to the square of the terminal voltage:
ESC =1
2CSCV 2
SC . (3.46)
Furthermore, it is also possible to allow the supercapacitor being dischargedunder the designed minimum voltage while the three bridges (all of them operatein square-wave mode) are still soft-switched. What the lowest voltage can bedepends on the circuit parameters such as the inductances and power flow profiles.In general, with a large operating phase shift (i.e., at heavy load), the switchingconditions are better. Hence, a lower allowable minimum supercapacitor operatingvoltage while maintaining soft-switching. Refer to Fig. 3.2 on page 68 for the plotof the soft-switched operating region for the two-port system. For the three-portsystem, the ZVS operating range (without duty ratio control) is wider than thatof the two-port system because of the combination of the currents in the twobranches, as analyzed in Section 3.3.
3.7.2 Experimental results
As a proof-of-concept unit, the first laboratory prototype was rated at 1 kWmaximum power at 20 kHz. The switching frequency is restricted by the resolutionof the digitally implemented phase shift. It can be increased to 100 kHz or higherwhen using an analog controller, a DSP with high-resolution PWM output (e.g.,TMS320F2808 DSP) or techniques such as dithering. A PEM fuel cell (maximum

94 Chapter 3. Soft-switched TAB converter
(a) (b)
v1 50 V/div
v2 200 V/div
v3 50 V/div
20 A/div
i3 20 A/div
Time: 10 µs/div
i1
Time: 10 µs/div
i2
2 A/div
Figure 3.21: Experimental results of the TAB converter in Fig. 3.6 at ϕ12 = 0.1π,ϕ13 = 0.05π and D3 = 1, showing (a) the voltages generated by thebridges, and (b) the currents through the transformer windings.
power 1 kW) from Avista Labs and a 145 F supercapacitor with a rated voltage of42 V from Maxwell were used as the generator and storage, respectively. The fuelcell used for the experiment has a built-in dc-dc converter and provides a roughlyregulated output of around 54 V. It was originally used as a battery charger for a48 V system.
The fuel cell and load side bridges were implemented with half-bridges, andthe supercapacitor side bridge was a full-bridge. Power MOSFETs were used asthe switching devices for all the bridges. The gate drive optocoupler HCPL-316Jfrom Agilent was used for driving the MOSFETs.
The fuel cell current iFC was sensed by a Hall effect current transducer fromLEM (LAH 50-P). Several operational amplifiers were used to measure the neces-sary circuit operating parameters, including VLoad, VFC , and VSC , as the feedbacksignals for the closed-loop control.
Fig. 3.21 (D3 = 1) and Fig. 3.22 (D3 = 0.5) show the measured voltages (v1,v2, and v3) generated by the bridges and the currents (i1, i2, and i3) through thetransformer windings at the maximum and minimum supercapacitor voltage level.It can be observed that the peak current is high when the duty ratio is small.Because of soft-switching, in both operating conditions the waveforms are cleanand free of ringing. The experimental results correlate to the simulation results5.
Furthermore, system power flow control in response to a pulsating load underthe closed-loop operation is illustrated in Fig. 3.23. The current (power) deliveredby the fuel cell remains unchanged after the transients and the load variations arecompensated for by the supercapacitor.
In all the measurement results shown above, the situation that an average zeropower is drawn from the supercapacitor is demonstrated. In addition, to illustratethe operation of the TAB converter at other operating phase shifts, Fig. 3.24shows the key waveforms when a power is drawn from the supercapacitor and
5In the actual experimental prototype, the inductances are not exactly the same as the onesin the simulated circuit.

3.7. Simulation and experimental results 95
(a) (b)
v1 50 V/div
v2 200 V/div
v3
50 V/div
Time: 10 µs/div
40 A/div
i3
40 A/div
i1
Time: 10 µs/div
i2 4 A/div
Figure 3.22: Experimental results of the TAB converter in Fig. 3.6 at ϕ12 = 0.1π,ϕ13 = 0.05π and D3 = 0.5, showing (a) the voltages generated by thebridges, and (b) the currents through the transformer windings.
iFC
iLoad
iSC
Trace 3Time:
5 ms/div
Trace 2
Trace 1
20 A/div
0.5 A/div
5 A/div
Figure 3.23: Experimental results of the closed-loop power flow control of the TABconverter in Fig. 3.6 with the dual-PI-loop control scheme in Fig. 3.8 inresponse to step changes in the load.
Fig. 3.25 displays the waveforms when energy is stored into the supercapacitor.The waveforms of the currents vary with the operating point. A picture of theprototype is shown in Fig. 3.26. The TAB converter described in Section 2.3 canbe viewed as a special case (D1 = D2 = D3 = 1) of the converter presented in thischapter.
A second prototype rated at 3.5 kW and 100 kHz switching frequency using allfull-bridges was also tested. In this case the control scheme was implemented withthe TMS320F2808 DSP (using high-resolution phase shift). Measurement resultsfrom the 3.5 kW prototype will be presented in Section 8.10.

96 Chapter 3. Soft-switched TAB converter
(a) (b)
v1 50 V/div
v2 200 V/div
v3 50 V/div
Time: 10 µs/div
40 A/div
20 A/div
i1
Time: 10 µs/div
i2
4 A/div
i3
Figure 3.24: Experimental results of the TAB converter in Fig. 3.6 at ϕ12 = 0.1π,ϕ13 = 0 and D3 = 1, showing (a) the voltages generated by the bridges,and (b) the currents through the transformer windings.
(a) (b)
v1 50 V/div
v2 200 V/div
v3 50 V/div
Time: 10 µs/div
40 A/div
i3 20 A/div
i1
Time: 10 µs/div
i2
4 A/div
Figure 3.25: Experimental results of the TAB converter in Fig. 3.6 at ϕ12 = 0.1π,ϕ13 = 0.1π and D3 = 1, showing (a) the voltages generated by the bridges,and (b) the currents through the transformer windings.
3.8 Methods for soft start-up
Among practical design issues of the TAB converter, of particular concern is a softstart-up method which can realize a reliable, safe and smooth start-up transition.Over-current at start-up is a drawback existing in both DAB and TAB converterswhere power flow is controlled by means of phase-shifting the bridges. For example,in the DAB converter the load side capacitor is charged from zero at start-up, whilethe source side is at its normal operating voltage. As a result, the current waveformis triangular having a high peak value (see Fig. 3.27). Theoretically, no power canbe transferred with phase shift control if the load side voltage is zero. Furthermore,the load side bridge is hard-switched during this stage. Extra control is needed toavoid the over-current. An easy way is to control the duty ratio of the source sidebridge during start-up. Meanwhile the load side bridge is uncontrolled, effectively

3.8. Methods for soft start-up 97
Figure 3.26: Photograph of the 20 kHz TAB converter prototype.
v1
v2
ϕ
tωi1
Triangular waveshape
with a high peak value
Amplitude of v2 is very low
Amplitude of v1 is normal
tω
tω
Figure 3.27: Waveforms of the DAB converter during hard start-up.
being a rectifier6. The converter is operated in buck mode so that the source portprovides charging current for the load side. By increasing the duty ratio gradually(ramping up) from zero to a certain value with open-loop control, the load sidecapacitor can be slowly charged to an operational level. Then, the closed-loopcontrol takes over to regulate the output voltage. Note that the load should bedisconnected from the output dc filter capacitor during the start-up procedure.
For the TAB converter, this method can also be used. Suppose a complete coldstart-up, that is, the supercapacitor and the load side capacitor are completelydischarged (VSC = 0 and VLoad = 0). In most cases independent operation of thesystem is desirable. Therefore, the converter should be able to establish the initialoperating conditions by itself. For instance, it should be capable of charging thesupercapacitor to its nominal operating voltage. Otherwise, an extra charger wouldbe necessary. With the proposed soft start-up method, it is possible to charge
6A MOSFET behaves like a diode when the gating signal is zero because of its anti-parallelbody diode.

98 Chapter 3. Soft-switched TAB converter
CSC
L1
L2
L3
N2
v3
v2
v1
i1
i2
i3
Fuel
cell
Super
capacitor
Load
iFC
VLoad
VFC
N1
N3
+
+
VSC
CL
v1
Figure 3.28: Equivalent circuit of the TAB converter during soft start-up.
both the supercapacitor and load side capacitor to their operational voltages. Inthe start-up stage, both the load and supercapacitor side bridge are operated asan uncontrolled diode rectifier. The equivalent circuit is illustrated in Fig. 3.28,showing a full-bridge circuit and two diode rectifiers. The converter is effectivelya buck converter having two outputs, operating in open loop. The whole startupprocedure could take many minutes, depending on the maximum allowable current.Once both power ports reach a sufficient dc voltage, normal phase shift operationtakes over.
A second method is to operate the converter at a higher frequency duringthe start-up stage. In the DAB and TAB converter, the switching frequency is apossible control variable. In view of (2.2) and (3.14), at a higher frequency lesspower is transferred. The impedance of the inductor becomes higher; hence thecurrent is limited. Taking into account that the load side bridge is hard-switchedat this stage, an intermittent operation mode should be applied. In addition, abuck-boost start-up procedure for the three-port converter was discussed in [79].
3.9 Duty ratio control for N-port topology
It is possible to extend the three-port topology to an N -port topology – an N -port transformer-coupled multi-active-bridge (MAB) dc-dc converter. In such aconverter the power flow can be controlled by the phase shifts. We will discuss thepower flow in the MAB topology in Section 6.8.
In the MAB converter, the worst case operation mode is that all the ports havewide operating voltage ranges. It is usual that at least one output port voltageis regulated, for example the load port. Thus, this port operates in square-wavemode. If more ports keep a constant operating voltage, switching conditions arebetter. According to the proposed method, the transformer turns ratios are chosenaccording to the minimum operating voltages at the ports:
N1 : N2 : · · · : NN = V1min : V2min : · · · : VNmin, (3.47)

3.10. Conclusions 99
where V1min, V2min, · · · , VNmin are the minimum operating voltages. The dutyratios are controlled with respect to the port operating voltages:
D1 =V1min
V1, D2 =
V2min
V2, · · · , DN =
VNmin
VN
. (3.48)
Accordingly, the following relationship is true:
V1D1
N1=
V2D3
N2= · · · =
VNDN
NN
. (3.49)
In other words, the half-cycle voltage-time integrals of the voltages applied to thetransformer windings are kept equal.
If the converter is controlled in this way, ZVS conditions for all the switchesover the full operating region are theoretically achieved. The worst case is thecritical ZCS. The proposed duty ratio control method is easy to implement. Onlya simple division is needed to calculate the duty ratio.
3.10 Conclusions
Sustainable electricity generators such as fuel cells and photovoltaics, and storagelike supercapacitors, have a wide operating voltage range and therefore presentoptimization challenges for power converters. Neither the DAB nor the TABconverter can operate with soft-switching over the full operating region when theinput voltage varies over a wide range. In addition to the primary power flowcontrol that is achieved by phase-shifting the bridges, a simple and effective dutyratio control method has been proposed. Essentially, the latter aims to keep thevolt-second product at each transformer winding equal. By adjusting the dutyratio of the voltage presented to the winding inversely proportional to the port dcvoltage, ZVS conditions are achievable over the full operating range.
The application of this control method in a fuel cell and supercapacitor systemhas been analyzed. Duty ratio control is applied to the supercapacitor bridge and,if required, to the fuel cell bridge to handle voltage variations while maintainingZVS. The advantage of the proposed duty ratio control method is that only asingle division is needed to calculate the duty ratio. The system was modeled andthe DSP-based dual-PI-loop control scheme was described in detail. This controlscheme is straightforward to implement. It manages power flow and minimizes themutual influence between the two PI regulators. Some practical issues such as theDSP implementation of the control scheme and the design of the transformer andinductors were also addressed. In addition, soft start-up procedures were discussed.The closed-loop simulation and experimental results of a 1 kW prototype validatethe effectiveness of the converter and control strategy. The power flow in thesystem has been proved to be controllable.

100 Chapter 3. Soft-switched TAB converter

Chapter 4
Topology combining dc-linkand magnetic-coupling
1Different from the triple-active-bridge topology presented in Chapter 2 and 3, thischapter proposes a two-input bidirectional dc-dc converter that interfaces a fuelcell, supercapacitor, and load by a combination of a dc-link and magnetic-coupling.A boost dual-half-bridge and a bidirectional switching cell are used. The topologyonly needs six power switches. The load is galvanically isolated from the sourceand storage. Furthermore, the proposed converter draws/injects smooth currentfrom the fuel cell and supercapacitor.
The system is suitable for applications like domestic power generation wheresimple topology, autonomous operation, and low cost are important. Differentcontrol schemes for power flow management are investigated. A variable hystere-sis band control method is proposed in order to achieve soft-switching for thesupercapacitor bridge. In addition, by applying PWM control to both sides of thetransformer, it is possible to operate the fuel cell at different power levels (thusdifferent output voltage levels) while keeping the advantages such as soft-switchingat light load. Moreover, it is shown that the concept of combining the dc-link andmagnetic-coupling can be further developed to an extended topology for multiportbidirectional converters.
1This chapter is based on the following papers:
H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “Multi-input bidirectional DC-DC converter combining DC-link and magnetic-coupling for fuel cell systems,” in Proc. IEEEIndustry Application Society Conference and Annual Meeting (IAS’05), Hong Kong, China, Oct.2005, pp. 2021–2028.
H. Tao, J. L. Duarte, and M. A. M. Hendrix, “Novel zero-voltage switching control methods fora multiple-input converter interfacing a fuel cell and supercapacitor,” in Proc. IEEE The 32ndAnnual Conference of the IEEE Industrial Electronics Society (IECON’06), Paris, France, Nov.2006, pp. 2341–2346.
101

102 Chapter 4. Topology combining dc-link and magnetic-coupling
4.1 Introduction
Bidirectional dc-dc converters are essential for interfacing storage elements. Manysingle-input single-output bidirectional converter topologies have been developedin recent years. A naturally soft-switched bidirectional dc-dc converter was pro-posed in [10]. This converter has the advantages of simple circuit topology andsoft-switching without additional devices. For interconnecting the source, stor-age, and load, a multiple-input bidirectional converter performs best with respectto requirements like centralized control and compact packaging. Multiple-inputtopologies found in the literature for combining diverse sources and storage ele-ments use either a dc-link [12], [13], or magnetic-coupling [47], [51], [53], [54].
In this chapter, an alternative converter topology suitable for three-port in-terface is proposed [60]. As shown in Fig. 4.1, the topology makes use of bothdc-link and magnetic-coupling techniques. It can also be viewed as an extensionof the circuit presented in [10]. In this application the system is considered to bemultiple-input. The topology is extended from single-input to two-input.
The advantage of the proposed converter topology is that it only needs sixpower switches while supporting bidirectional power flow for all the power ports,which makes it attractive for its simplicity and low component count. In particular,the converter draws continuous current from the fuel cell and supercapacitor, whichwill be a favorable operating condition. For fuel cells, there is usually a maximumripple current limit, especially low-frequency ripple, for the proper operation offuel cells.
It is also possible to couple the supercapacitor directly via the dc-bus, showinga simpler topology. A newly developed example can be found in [80] for electricvehicle applications. In this case, only four switches are needed. However, sincethe dc-bus voltage should not vary in a wide range, the energy storage capacity ofthe supercapacitor cannot be fully utilized, leaving considerable unusable chargein the capacitor, thus limiting its effective energy storage capacity.
4.2 Topology description and operating principles
4.2.1 Topology description
Depending on applicable local standards, in domestic applications systems mayrequire isolation between the generator and the load. The ac output, e.g., 50 Hz,230 V, normally needs a 400 V dc voltage to feed an inverter, while fuel cellgenerators and supercapacitor cells are low voltage devices. Series connections areneeded to obtain higher voltage and voltage balancing is required if many cellsare connected in series. Hence, a transformer to boost the low fuel cell voltage tomatch a 400 V output voltage is desirable. In addition, the dc-ac stage2 usuallyoperates in a manner where it normally expects a stiff dc input voltage. Thus,the converter should be able to control the output dc voltage with a fast dynamicresponse.
2The dc-ac stage is a part of the load, not shown in Fig. 4.1.

4.2. Topology description and operating principles 103
L
1 : n
v2v1 RL
i1C3
C4
CL
C2
C1LSC
LFC
Super
capacitor
S1
S2 S4
S3S5
S6
iSC
iFC
VLoadVDC
VSC
VFC
HB1 HB2 HB3
iLoad
Fuel
cell
+ Load+
Power flow
N1 N2
Low-voltage side High-voltage side
Figure 4.1: Proposed two-input bidirectional dc-dc converter topology. The bridges aredenoted by HB1, HB2, and HB3.
Taking these requirements into account, as shown in Fig. 4.1, the proposedconverter topology consists of a boost dual-half-bridge (HB2 plus HB3) and a bidi-rectional switching cell (HB1) interfacing the supercapacitor. The high-frequencyisolation transformer links HB1 and HB2 with HB3, whereas HB1 and HB2 arelinked together at the dc-link capacitors C1 and C2. The transformer is multi-functional. It electrically isolates the load from the source and storage, and booststhe source side low voltage to the load side high voltage. In addition to that, theleakage inductance is used as an energy transfer element. The operation of HB1can be divided into two modes: boost mode and buck mode. In the buck mode thesupercapacitor sinks surplus power, whereas in the boost mode it delivers powerto the load. The possible operation of HB2 and HB3 is also bidirectional. Thepower flow of the fuel cell, however, is not bidirectional. It is preferable that thefuel cell operates at the maximum power in order to achieve maximum utilizationof the fuel. The current demand may be less than the available current, but thisresults in unused fuel being possibly expelled from the fuel cell. A low current rip-ple is achieved both for the fuel cell and supercapacitor owing to the current-fedstructure of this converter topology. Note that the circuit in Fig. 4.1 is a front-endconverter. It does not need an additional interface stage to the fuel cell, whosecharacteristic is already taken into account. This is detailed in Section 4.4.
4.2.2 Principle of operation
Fig. 4.2 shows the gate control signals for the six power switches. HB1 is PWM-controlled. The variation of the supercapacitor voltage is matched by appropriateduty cycle of HB1 as
DSC =VDC − VSC
VDC
, (4.1)
where VDC is the dc-link voltage and VSC is the voltage of the supercapacitor.HB2 and HB3 switch at 50% fixed duty cycle (DFC = 0.5) and their gate signalsare shifted with respect to each other by an angle ϕ, which is positive when thegate signal of HB3 is lagging that of HB2. Each half-bridge is driven by a pair ofcomplementary gate control signals. In addition, as shown in Fig. 4.2, the PWMcarrier signals for HB1 and HB2 are shifted by 180o; thus they are interleaved,

104 Chapter 4. Topology combining dc-link and magnetic-coupling
2πDSC HB1
HB2
HB3
ωt
ϕ
2π
2πDFC
2πDFC
πS1
S2
S3
S4
S5
S6
Figure 4.2: Gate control signals for the six power switches.
which achieves a minimum current ripple for the dc-link capacitors, C1 and C2.A relatively small capacitance is needed, which benefits the design of the dc-linkcapacitors from the viewpoint of cost and size.
The power flow between the low-voltage side and the high-voltage side is con-trolled by the phase shift between HB2 and HB3. In fact, HB2 and HB3 form adual-active-bridge (DAB) converter [23]. The leakage (and external) inductancesof the transformer act as energy transfer elements. Similar to (2.2), the amountof power delivered to the load port is given by
P =VDCVLoad
4nωLϕ
(1 − |ϕ|
π
), (4.2)
where ω = 2πfs (fs is the switching frequency), n is the transformer turns ratio,L is the total leakage (and external) inductance referred to the primary, and VLoad
is the load side dc voltage. The power flow is bidirectional.For a better understanding of the operating principle of the proposed converter,
the boost dual-half-bridge converter is analyzed separately. The primary-referredcircuit model is illustrated in Fig. 4.3. This topology is actually a combination ofa DAB converter implemented with half-bridges HB2 and HB3 and a boost half-bridge that consists of S3, S4, C1, C2, and LFC . HB2 has two functions. Firstly,it boosts the fuel cell voltage VFC to the dc-link voltage VDC . Secondly, it is ahalf-bridge inverter to produce high-frequency ac voltage. Since HB2 operates ata fixed 50% duty cycle, the following relation always stands:
VDC = 2VFC . (4.3)
Both HB2 and HB3 produce a high-frequency square-wave voltage, v1 and v2.They are applied to the primary and secondary of the transformer, respectively,and shifted with respect to each other by ϕ. The current waveform, i1, is deter-mined by the phase shift and the ratio of the two voltages. The optimal case isthat the primary-referred peak value of v2 is equal to that of v1. This requires the

4.2. Topology description and operating principles 105
L
v2v1RLi1 CL
C2
LFC
S4
S3S5
S6
iFC
VLoadVDC
VFC
HB2 HB3
iS3
iS4
iS5
iS6
Fuel
cell
'
iLoadC1
C4
C3
'
'
'
'
Figure 4.3: primary-referred boost dual-half-bridge converter (HB2 plus HB3).
transformer turns ratio to be chosen according to
VDC =VLoad
n. (4.4)
Then, the peak current is minimized and soft-switching is achievable over the entirephase shift region (−π/2 ≤ ϕ ≤ π/2) as analyzed in Section 3.2.1 for the DABconverter. Under this operating condition the shape of the current waveform i1 istrapezoidal. Fig. 4.4 plots the idealized operating waveforms, where for simplicitythe slopes of the voltages and currents during the (resonant) switching transitionsare not shown.
A close study reveals that the average current stress of S4 is much higher thanthat of S3 when the power flows from the source side to the load side (ϕ > 0),whereas the current stress of S5 and S6 are the same. This is due to the particularconfiguration of the boost dual-half-bridge. In fact, the boost half-bridge circuitis asymmetrical. Referring to the definition in Fig. 4.3, the ON-time conductingcurrent of each switching device is given by
iS3 ON (t) = i1(t) − iFC(t),iS4 ON (t) = −i1(t) + iFC(t),
i′
S5 ON (t) = −i1(t),
i′
S6 ON (t) = i1(t).
(4.5)
Because iFC should always be positive, S4 clearly carries more current than S3.Therefore, devices with different current ratings have to be considered for S3 andS4. In the case of a regenerative load (Fig. 4.5), the power flow is reversed. Theregenerative power together with the power generated by the fuel cell charges thesupercapacitor. In this case, S3 carries more current than S4 as shown in Fig. 4.5,due to the fact that the fuel cell power is always positive.

106 Chapter 4. Topology combining dc-link and magnetic-coupling
v1
v2
i1
iFC
iS3
iS4
iS5
iS6
t
t1 t2 t3 t4
S3
off
S5
off
S4
off
S6
off
ϕ
ω
0.5VDC
0.5VLoad''
'
'
Figure 4.4: Idealized operating waveforms of the boost dual-half-bridge converter witha normal (power consuming) load (positive phase shift, ϕ > 0).
4.3 Analysis of soft-switching conditions
4.3.1 ZVS conditions for HB2 and HB3
The commutation of HB2 and HB3 is similar to the diode-to-switch commutationmode of the phase-shifted full-bridge dc-dc converter. The soft-switching condi-tions for each switch depend on the magnitudes of the currents i1 and iFC at theswitching instants, i.e., the main devices are turned off with a positive currentflowing through them and then the current diverts to the opposite diode whichallows the in-coming MOSFET to be switched on under zero-voltage. In order toachieve ZVS under normal load (Fig. 4.4), the currents should obey
⎧⎪⎪⎨⎪⎪⎩
i1(t1) > iFC(t1)i1(t2) < 0i1(t3) < iFC(t3)i1(t4) > 0.
(4.6)
In the case of a regenerative load (Fig. 4.5), i1 reverses its polarity. The soft-

4.3. Analysis of soft-switching conditions 107
t
t1 t2 t3 t4ϕ
ω
S5
off
S3
off
S6
off
S4
off
0.5VDC
0.5VLoad
v1
v2
i1
iFC
iS3
iS4
iS5
iS6
'
'
'
'
Figure 4.5: Idealized operating waveforms of the boost dual-half-bridge converter witha regenerative load (negative phase shift, ϕ < 0).
switching conditions are summarized as⎧⎪⎪⎨⎪⎪⎩
i1(t1) < 0i1(t2) > iFC(t2)i1(t3) > 0i1(t4) < iFC(t4).
(4.7)
To examine the soft-switching conditions, one can solve the current at eachswitching instant, which is found to be (under a normal load, see Fig. 4.4)
iS3, turnoff = i1(t1) − iFC(t1) =VDC
2ωLϕ − (IFC − 0.5∆IFC),
iS4, turnoff = −i1(t3) + iFC(t3) =VDC
2ωLϕ + (IFC + 0.5∆IFC),
iS5, turnoff = − i1(t2)
n=
VDC
2nωLϕ,
iS6, turnoff =i1(t4)
n=
VDC
2nωLϕ,
(4.8)
where IFC = PFC/VFC is the average current supplied by the fuel cell over oneswitching period, and ∆IFC is the amplitude of the ripple current in iFC , given

108 Chapter 4. Topology combining dc-link and magnetic-coupling
iSC
Soft-switching
Hard-switching
Hard-switching
iSC iSC
Figure 4.6: HB1 switching condition at different situations.
by
∆IFC =VDC
4LFCfs
. (4.9)
Note that the operating condition DFC = 0.5 and VLoad = nVDC is assumed. Ascan be inferred from (4.8), a high ripple current in iFC improves the switchingconditions for both S3 and S4. This can be easily realized by choosing a lowerinductance for LFC . In theory, in steady-state (i.e., the supercapacitor supplieszero power) ZVS conditions are achievable over the entire phase shift region forHB2 and HB3 in either direction of the power flow [10]. In fact, if ∆IFC issufficiently large, ZVS is achievable for all operating conditions. However, thedv/dt at the switching instants of S3 and S4 are different because of differentturn-off currents. As a result, the allowable minimum and maximum dv/dt shouldbe designed according to the application requirements.
In addition, the ripple voltage on VDC will not deteriorate the soft-switchingconditions for HB2 and HB3 because as long as the average value of VDC is equalto the primary-referred value of VLoad, ZVS can be achieved for HB2 and HB3.Therefore, smaller capacitors are allowed for the dc-link.
4.3.2 ZVS condition for HB1
The average power/current drawn from the supercapacitor over a sufficient periodshould be zero. HB1 is designed only to match the transient power. S1 and S2 maybe soft-switched themselves because of the ripple current through LSC . Assumethat the average current of the supercapacitor ISC is within the region:
−∆ISC
2≤ ISC ≤ ∆ISC
2,
∆ISC =VSC (VDC − VSC)
LSCfsVDC
,(4.10)
where ∆ISC is the magnitude of the ripple current. Under this condition S1 andS2 are turned off with a positive current flowing through them because the instan-taneous inductor current iSC is alternating over one switching period. Therefore,they are soft-switched. However, HB1 is not always naturally soft-switched. If theaverage current ISC exceeds the limit (4.10) (see also Fig. 4.6), the diode-to-switchcommutation fails because the instantaneous inductor current iSC is unidirectionalin this situation and thus hard-switching occurs.
In order to improve the switching conditions for S1 and S2, an auxiliary dioderesonant pole (ADRP) [81] can be used. Fig. 4.7(a) shows the circuit configuration.

4.4. Control strategy and power flow management 109
S1
S2
iSC
Cr2
LSC
SC+
Lr
Cr1Sa1
Sa2
(b)
S1
S2
Dr1 Cr1
Dr2 Cr2
LSC Lr
SC+
(a)
iSC
Figure 4.7: Auxiliary circuits to improve the switching conditions of HB1: (a) auxiliarydiode resonant pole (ADRP), (b) zero-voltage transition (ZVT).
It is rather simple and does not need active components or extra control circuitry.The auxiliary resonant components Dr1, Dr2, Cr1, Cr2, and Lr are paralleled toHB1. Their freewheeling current helps S1 and S2 to be soft-switched. However, thecontinuously freewheeling current causes additional losses in the resonant inductorLr and power switches, which is a problem that should be considered in high-powerapplications. Nevertheless, the ADRP could be a suitable solution for low-powerapplications.
To make use of the pole formed by the two dc-link capacitors, using the auxil-iary resonant commutated pole (ARCP) [82] to achieve ZVS could be also consid-ered, but it is not suitable for this situation because the average supercapacitorcurrent is not periodic. Alternatively, the zero-voltage transition (ZVT) PWMtechnique as shown in Fig. 4.7(b) is also applicable. However, it needs two ex-tra switches for this bidirectional application and requires complicated controlcircuitry. Other control techniques like the critical continuous current operationmode can also achieve ZVS by paralleling a resonant capacitor to the switch [83].This method, however, requires a boost ratio greater than two. Unfortunately,when the average current of the supercapacitor is close to zero, the switchingfrequency will become unacceptably high. To limit the maximum switching fre-quency, an intermittent operation mode could be applied. This results in a morecomplicated control. Soft-switching control methods for the converter will be fur-ther described in Section 4.6.
4.4 Control strategy and power flow management
As mentioned in Section 4.2.1, the output voltage VLoad should be regulated witha fast response. Simultaneously, the fuel cell power PFC or current iFC should becontrolled. Two circuit variables are available for being used as control variables,namely the phase shift ϕ and the duty cycle DSC , as indicated in Fig. 4.2.
4.4.1 Direct fuel cell current-mode control
Fig. 4.8 shows the control scheme, which is referred to as the direct fuel cell current-mode control, where V ∗
Load, I∗FC , and V ∗DC are the reference signals for VLoad, IFC ,

110 Chapter 4. Topology combining dc-link and magnetic-coupling
Two-input
bidirectional
converter
Controller 1
(PID)Limiter
VDC
ϕ
DSCVDCVDC iFC
VLoadVLoad
IFC
VLoad
+-
+
-
+
-
*
**Controller 2
(PID)
Controller 3
(PID)
LPFIFC
Figure 4.8: Control scheme for the proposed two-input converter in Fig. 4.1, showingthe direct fuel cell current-mode control.
0 5 10 15 20 2520
30
40
50
Vo
lta
ge
(V
)
Current (A)
0 5 10 15 20 250
200
400
600
Po
we
r (W
)
P-I Curve
V-I Curve
Figure 4.9: Characteristic of the 500 W PEM fuel cell, showing the P-I and V-I curves.
and VDC , respectively. As suggested in the figure, the output voltage VLoad iscontrolled by regulating the phase shift ϕ. A higher demand of the load leadsto a larger phase shift. The fuel cell current is regulated directly by a PID-typecontroller and the output of the current regulator is the reference for the dc-linkvoltage V ∗
DC . With an outer current loop and an inner voltage loop, both thedc-link voltage and the fuel cell current can be controlled. The inner loop has ahigher bandwidth. The dc-link voltage can be designed in such a way that VDC istwice that of the fuel cell terminal voltage at nominal load (normally correspondswith the maximum power of the fuel cell).
The P-I and V-I curves of the fuel cell are plotted in Fig. 4.9 [66]. The basicequivalent dynamic circuit model of the PEM fuel cell has been given in Fig. 2.11on page 41. In this control scheme the fuel cell current is explicitly regulated.
Note that for a proper operation of the proposed converter, a weak primarysource is essential. The source has to have a droop characteristic. Energy genera-tors like fuel cells and photovoltaics are of this type – the output voltage decreasesas the output current increases. The proposed converter is a front-end converter,interfacing the fuel cell directly.

4.5. Simulation and experimental verifications 111
4.4.2 Power flow management
In the control scheme of Fig. 4.8 the power flow from the supercapacitor portis not directly controlled. It sinks or sources the power difference between theload and the fuel cell. The deficiency or surplus is managed automatically bythe proposed control schemes. For example, in case that the load consumes morepower than the fuel cell generation, the dc-link voltage will attempt to drop.Consequently, by the regulation of the controller, the duty cycle DSC attempts tobecome larger. As a result, a current will be extracted from the supercapacitorto charge the dc-link capacitor in order to maintain the dc-link voltage. Hence,the power deficiency is supplied by the supercapacitor automatically. In the caseof excess power, the supercapacitor is charged. The system can match the loadvariations while the power of the fuel cell is kept at the same level. In addition,the supercapacitor voltage varies slowly depending on the load profile. The controlcircuit also automatically adjusts the duty cycle to match this change accordingto (4.1).
As also mentioned in Section 3.4, the supercapacitor voltage should be keptwithin the maximum and minimum limiting voltage. When the supercapacitoris being over-charged or discharged, by slightly adjusting the fuel cell currentreference I∗FC as shown in Fig. 4.8, the control circuit is also capable of chargingor discharging the supercapacitor.
It is worth to mention that the voltages on both sides, VLoad and VDC , areregulated. This would be an optimal operating condition for the DAB converter,where a stable, equalized primary-referred voltage is required in order to achieveZVS over the entire phase shift region and to minimize the peak current.
A second advantage of the converter is that the two control loops, the regu-lation of the phase shift ϕ and duty cycle DSC , are decoupled. Therefore, it iseasy to implement the control. The bandwidths of the two control loops can beequally high. The fast response means smaller buffer capacitors can be used. Thereliability and lifetime of the converter can therefore be significantly improved ifnon-electrolytic type capacitors are chosen for both the dc-link and output capac-itors.
4.5 Simulation and experimental verifications
4.5.1 Simulation results
To verify the theoretical considerations, the software program PSIM was used tosimulate the proposed two-input converter in Fig. 4.1 and the control strategies.The circuit parameters used for both the simulation and experiment are listedin Table 4.1. Since the system’s dynamic properties are greatly improved by thestorage, only the steady-state characteristic of the fuel cell is interested.
Fig. 4.10 shows the simulation results of the steady-state operation with a500 W load. The waveforms can be compared with the theoretical results inFig. 4.4. As can be seen, the current i1 has a flat top because v1 and v2 are

112 Chapter 4. Topology combining dc-link and magnetic-coupling
Table 4.1: Circuit parameters of the two-input converter
Description Symbol ValueFuel cell voltage VFC 24 to 40 VFuel cell internal resistance Rint 0.78 ΩLoad side dc voltage VLoad 400 VSupercapacitor voltage VSC 15 V to 42 VDc-link voltage VDC 54 VFuel cell power PFC 500 W maximumSwitching frequency fs 20 kHzTransformer turns ratio n 7.6Inductance LFC 54 µHInductance LSC 30 µHInductance L 2.3 µH
matched (i.e., their primary-referred amplitudes are equal). It is also shown thatthe current stress of S4 is higher than that of S3. Note that the phase shift ϕ inthe simulated case is smaller than that in Fig. 4.4.
Fig. 4.11(a) illustrates the system power flow with closed-loop operation basedon the proposed control strategy in Section 4.4.1 while a step load variation takesplace. The load changes from 500 W to 1000 W at 30 ms, then turns back to 500 Wat 40 ms. The output voltage VLoad is regulated to a near-constant value, 400 V,while the power delivered by the fuel cell remains unchanged at 450 W. Shown inFig. 4.11(a) are the currents of the fuel cell iFC , load iLoad and supercapacitor iSC ,and the load voltage VLoad. They can represent the powers since the voltage at eachport remains unchanged. Evidently, the controllers are capable of managing thepower flow and it also shows a fast response to the load variations. The deficiencyin power, being 500 W in this simulated case, is supplied by the supercapacitor.
Moreover, Fig. 4.11(b) shows a supercapacitor charging process while the loadremains unchanged. A step change in the reference signal I∗FC at 50 ms results incharging the supercapacitor with an average power of around 80 W, while the loadis remaining at 400 W. By returning the reference signal I∗FC back to the originalvalue at 200 ms, the charging process is terminated.
4.5.2 Measurement results
Based on the theoretical analysis and simulation, the proposed converter was testedusing a laboratory prototype rated at 500 W at 20 kHz switching frequency. Forthis measurement a fuel cell emulator was used. The main design parameters forthe proposed two-input converter have been listed in Table 4.1, being the sameas the circuit simulation parameters. The magnetic components were designedwith conventional EE-shape ferrite cores with different sizes and were wound withhigh-frequency litz wires. The control scheme was digitally implemented with aTMS320F2812 DSP. A Hall effect current transducer from LEM and several op-

4.5. Simulation and experimental verifications 113
v1
v2
i1
iFC
iS3
iS4
iS5
iS6
Figure 4.10: Simulation results of the proposed two-input converter in Fig. 4.1, showingsteady-state operation waveforms of the proposed converter at ϕ = 0.1π,DFC = 0.5 and DSC = 0.5.
erational amplifiers were used to sense the necessary circuit operating parametersas the feedback signals, including the output voltage VLoad, fuel cell current iFC
and voltage VFC , and the low-voltage side dc-link voltage VDC . All the switchingdevices were implemented with power MOSFETs. The gate driver HCPL-316Jfrom Agilent was used for driving the MOSFETs and providing galvanic isolationbetween the DSP and the power stage.
Measurement results of the key operating waveforms in steady-state (at ϕ =0.1π) are shown in Fig. 4.12, which further confirm the theoretical analysis. Thanksto soft-switching, the waveforms are clean.
The converter was also tested with closed-loop control. In Fig. 4.13(a), theresponse to a 200 W step increase in the load demand (from 500 W to 700 W,done by switching on an extra load resistor parallel to the output) is illustrated.Moreover, a step decrease in the load power (from 700 W to 500 W) was also

114 Chapter 4. Topology combining dc-link and magnetic-coupling
iFC
iLoad
iSC
VLoad
iLoad
iFC
iSC
VLoad
(A)
(A)
(A)
(V)
(a) (b)
Figure 4.11: Simulation results of the proposed two-input converter in Fig. 4.1 withclosed-loop power flow control based on the direct fuel cell current modecontrol scheme, showing (a) a step change in the load while the energy de-livered by the fuel cell remains constant and (b) a supercapacitor chargingprocess while the output load remains unchanged.
tested as shown in Fig. 4.13(b). It can be observed that iFC remains constant andthe supercapacitor supplies the deficiency/surplus in the power. Good correlationis found between theoretical analysis, simulation, and experimental results.
4.6 Soft-switching control methods
This section is dedicated to the presentation of soft-switching methods for theproposed two-input converter in Fig. 4.1. Two control approaches are developed[84], [85]. To achieve ZVS for the supercapacitor side half-bridge HB1 without us-ing auxiliary power devices, an easy-to-implement variable hysteresis band controlis proposed. Furthermore, in order to handle the wide variation of the fuel cellvoltage while keeping ZVS, an asymmetrical wave control method is introduced.In this way, ZVS is achievable over the entire operating range.
4.6.1 Variable hysteresis band control
To operate the supercapacitor side bridge HB1 with ZVS, a method is proposed asan alternative to the method discussed in Section 4.3.2. The method is based onvariable hysteresis band control. Compared with the critical continuous operation

4.6. Soft-switching control methods 115
(a) (b)
vS2 50 V/div
10 A/div
Time: 20 µs/div Time: 20 µs/div
v1 50 V/div
v2 400 V/div
i1 40 A/div
10 A/diviFC
iSC
Figure 4.12: Measurement results of the proposed two-input converter in Fig. 4.1 atϕ = 0.1π and DSC = 0.5: (a) voltages across the transformer windingsand current waveforms at a time base of 20 µs/div, Trace 1: v1 (50 V/div),Trace 2: v2 (400 V/div), Trace 3: i1 (40 A/div), Trace 4: iFC (10 A/div),and (b) Trace 1: drain-to-source voltage of S2, vS2 (50 V/div), Trace 2:iSC (10 A/div), at a time base of 20 µs/div.
iFC
iLoad
iSC
20 A/div
1 A/div
20 A/div
(a) (b)
Time: 2 ms/div
iFC
iLoad
iSC
20 A/div
1 A/div
20 A/div
Time: 2 ms/div
Figure 4.13: Measurement results of the proposed two-input converter in Fig. 4.1 withclosed-loop power flow control, showing the response to step changes inthe load at a time base of 2 ms/div: (a) step increase of 200 W in the load,from top to bottom, Trace 1: iFC (20 A/div), Trace 2: iLoad (1 A/div),Trace 3: iSC (20 A/div), and (b) step decrease in the load, from top tobottom, Trace 1: iFC (20 A/div), Trace 2: iLoad (1 A/div), Trace 3: iSC
(20 A/div).
mode [83], with this method HB1 can operate without the penalty of very highswitching frequency or intermittent operation control when the average superca-pacitor current ISC is low.
To take advantage of the bidirectional ability of HB1, as shown in Fig. 4.14,this control method uses two references, i.e., I∗HI and I∗LO to define a referenceband which is subject to change in different operation modes. The operation of

116 Chapter 4. Topology combining dc-link and magnetic-coupling
ISC*
IW
Mode I
Mode II
Mode III
iSC
iSC
iSC
0
0
* 2SC WI I>
*2 2W SC WI I I− ≤ ≤
* 2SC W
I I< −
* *2HI SC minI I I= +
*
LO minI I= −
* * 2HI SC W
I I I= +
* * 2LO SC B
I I I= −
*
HI minI I=
* *2LO SC minI I I= −
0
ISC*
ISC*
t
t
t
Figure 4.14: Different operation modes with variable hysteresis band control for HB1.
HB1 is therefore divided into three modes according to the value of the averagecurrent ISC through LSC . The operating modes are
Mode I: when I∗SC > IW /2
I∗HI = 2I∗SC + Imin,I∗LO = −Imin,
(4.11)
Mode II: when −IW /2 ≤ I∗SC ≤ IW /2
I∗HI = I∗SC + IW /2,I∗LO = I∗SC − IW /2,
(4.12)
Mode III: when I∗SC < −IW /2
I∗HI = Imin,I∗LO = 2I∗SC − Imin,
(4.13)
where I∗SC is the reference (average value) for iSC , Imin is the minimum currentrequired to accomplish the resonance process of ZVS, and IW is the band size,which is fixed in Mode II. IW enlarges both in mode I and III as the supercapacitoraverage current rises. I∗LO is always negative; it stops at −Imin when the bandmoves upwards (in Mode I). After that point, only I∗HI moves upwards if I∗SC
further increases. Likewise, I∗HI is always positive; it stops at Imin when the bandmoves downwards (in Mode III). After that point, only I∗LO moves downwards if

4.6. Soft-switching control methods 117
I∗SC further decreases (i.e., increases negatively). In Mode I and III, the band sizeIW increases as the absolute value of I∗SC increases. Clearly, in all the operationmodes the average current through LSC is given by
I∗SC =1
2(I∗HI + I∗LO) . (4.14)
The relationship between the maximum switching frequency of HB1, fmax ,and IW is found to be
fmax =VDC
LSCIW
k(1 − k)
with k = VSC/VDC (0 < k < 1) .
(4.15)
A close study reveals that the switching frequency reaches the maximum whenk = 0.5 with a fixed IW . Therefore, for an allowed maximum switching frequencyfmax, IW in Mode II can be chosen according to
IW =VDC
4LSCfmax
. (4.16)
With this control method the instantaneous inductor current iSC is always con-tinuous and alternating over one switching cycle. Therefore, HB1 is soft-switchedin all cases. In Mode I and III, the switching frequency decreases when the powerflow of the supercapacitor (either sinking or sourcing) turns higher. As a conse-quence the current ripple increases.
The implementation of this control method is in the simplest, especially witha digital controller. As shown in Fig. 4.15, two reference signals I∗HI and I∗LO
are calculated for the different operating modes based on the above equations. Astandard hysteresis control unit consisting of comparators and logic gates generatesthe gate control signals for S1 and S2 directly. This control is similar to the regularhysteresis current mode control where the hysteresis band is usually fixed.
4.6.2 Asymmetrical wave control
Fuel cells are weak voltage sources in the sense that the output characteristic of afuel cell exhibits wide voltage variations. The output voltage level depends on theoutput power/current. In practice, a fuel cell system may be operated at differentoutput power levels. This should be taken into account in the circuit design.
So far, we have assumed that HB2 is operated at a fixed duty cycle of 50% andgenerates a high-frequency square-wave voltage. However, a further investigationsuggests that it is not necessary to operate at the fixed duty cycle. To make useof the half-bridge configuration at both sides of the transformer, an extra degreeof freedom in control can be obtained through the PWM control of HB2 and HB3.Half-bridges have the ability of automatic volt-seconds balancing. The resultingvoltage waveforms are asymmetrical. A similar application of this technique is alsofound in [73]. For a proper operation of the circuit, both HB2 and HB3 shouldoperate at the same duty cycle. It should be noted that this PWM control is not

118 Chapter 4. Topology combining dc-link and magnetic-coupling
LimiterPID
+_
VDC
VDCISC
IW Imin
Mode detection
IHI
ILO
Process
unit
iSC
S1
S2
Mode I, II, or IIIISC*
**
*
*
IHI
ILO
*
*
Figure 4.15: Implementation of the variable hysteresis band control for HB1.
intended to control the power flow; instead, it is only used to accommodate thevoltage variation of the fuel cell when operated at different output powers.
Let DFC denote the duty cycle of HB2 and HB3 (i.e., the ON-time of the lowerswitch). DFC is controlled in a way that
DFC =VDC − VFC
VDC
. (4.17)
In other words, since VDC is a constant, by adjusting DFC , the voltage imposedon the terminal of the fuel cell, VFC , is controlled. This in turn determines thepower drawn from the fuel cell.
In this way, as seen in Fig. 4.16, the current through the transformer, i1,stays trapezoidal, being the optimal case in terms of conducting loss. The polevoltages formed by half-bridge capacitors C1, C2, C3, and C4 at both sides ofthe transformer drift in response to the duty cycle (i.e., automatic volt-secondsbalance, an advantage of using half-bridges). The converter stays in ZVS modewhen the fuel cell voltage varies widely.
The PWM control is implemented with a PI regulator with narrow bandwidthsince the fuel cell power changes very slowly or by direct feedforward using (4.17)if the control system is digitally implemented. Note that the equation for powertransfer changes with respect to (4.2). The duty cycle DFC influences the powerflow, i.e.,
P =VDCVLoad
nωLϕ
(DFC − D2
FC − |ϕ|4π
). (4.18)
If the power flow is regarded as a function of the duty cycle, the maximumpower flow occurs at DFC = 50%. However, this does not impose constraints onthe control since power flow is mainly controlled by the phase shift. In practice,DFC can be designed to be 50% at the maximum fuel cell output power. As theoutput power of the fuel cell decreases, DFC becomes smaller. Then, the range ofthe duty cycle will be 0 < DFC < 50%.

4.6. Soft-switching control methods 119
v1
v2
i1
ϕ
2πDFC
2π
(1-DFC)VDC
2πDFCDFCVLoad
DFCVDC
(1-DFC)VLoad
VDC
VLoad'
'
'
'
tω
tω
tω
Figure 4.16: Ideal waveforms with asymmetrical wave control of HB2 and HB3.
Due to the asymmetrical voltages applied to the transformer, there is a limiton the maximum phase shift, being
ϕmax = min πDFC , π(1 − DFC) . (4.19)
The asymmetrical wave control is also applied to the triple-half-bridge con-verter in Section 5.2. More details about this control method will be presentedthere.
4.6.3 Multiloop control strategy
With the asymmetrical wave control, three degrees of freedom (i.e., ϕ, DSC , andDFC) are now available for the system control. In addition to the control schemedescribed in Section 4.4.1, a control strategy that contains three control loops isproposed. Multiple PID-type controllers are used to regulate the output voltageVLoad, dc-link voltage VDC , and fuel cell power PFC , simultaneously.
Fig. 4.17 depicts the proposed overall control scheme. V ∗Load, V ∗
DC , I∗SC , andP ∗
FC are the references for VLoad, VDC , ISC , and PFC , respectively. As shown,there are three control loops. In the first loop, VLoad is controlled directly byregulating the phase shift ϕ. The bandwidth of this control loop should be suffi-ciently high to guarantee the stiffness of the output voltage. In the second loop,VDC is regulated by adjusting the duty cycle of HB1 DSC . This loop has thehighest bandwidth in order to maintain a near-constant dc-link voltage. This isimportant because VDC is a disturbance input to the other two loops as illustratedin Fig. 4.18. In the third loop, PFC is calculated from the average fuel cell currentmeasured through a low-pass filter and the fuel cell voltage VFC . The power isthen regulated by a PID controller whose output DFC determines the duty cycleof the asymmetrical wave. This loop has the lowest bandwidth because the fuelcell power changes very slowly due to the fuel supply process. The main functionof this loop is to maintain ZVS while the fuel cell power varies (i.e., VFC changes).
The advantage from the control point of view is that the three control loops areessentially decoupled. The duty cycle control of HB1 is devoted to the regulation of

120 Chapter 4. Topology combining dc-link and magnetic-coupling
PID1
PID2
Hysteresis
controllerISC
VLoad
iFC
VLoad
DSC
ϕ
DFC
VFC
LPF PID3
PFC
VDC
VDC
iSC
Loop 1
Two-input
bidirectional
converter
Feedbacks
Multiply
+
-
+
-Loop 2
Loop 3+
-
*
*
*
*
IFC
Figure 4.17: Multiloop control strategy for the proposed two-input converter inFig. 4.1.
VLoad
VDC VDC
PFC PFC
Control loop 2
(PID2)
Control loop 1
(PID1)
Control loop 3
(PID3)VSC
VLoad
*
*
*
Disturbance to
control loop 1 and 3
Figure 4.18: System block diagram showing the relationship between the three controlloops in the proposed two-input converter in Fig. 4.1. VDC is a disturbanceto control loop 2 and 3.
VDC , while the phase shift control of HB2 and HB3 is dedicated to the regulation ofVLoad. The regulation of VDC , however, influences the regulation of VLoad becauseVDC is a disturbance to the regulation of VLoad and PFC as shown in Fig. 4.18.Since the third loop has a very low bandwidth, its impact on the system dynamicscan therefore be safely neglected.
4.6.4 Verification of the ZVS control methods
Simulation verification
Circuit simulations were carried out to verify the proposed ZVS control methods.Fig. 4.19 shows the simulation results of the variable hysteresis band control ofSection 4.6.1. A step increase of the supercapacitor power from 10 W to 125 W isinitiated at 40 ms. As can be seen, the controller switches from Mode II to Mode Iin order to keep ZVS as ISC increases. It is also observed that the ripple onVDC increases noticeably because of the lower switching frequency and the highercurrent ripple. Fortunately, VDC is not the final output, and thus the ripple is nota major concern. In addition, the ripple voltage on VDC will also not deteriorate

4.6. Soft-switching control methods 121
iSC
VDC
ILO*
IHI*
ISC*
VDC
iSC
IHI* ILO
* ISC*
Figure 4.19: Simulation results of the variable hysteresis band control of the two-inputconverter in Fig. 4.1, showing the waveforms of the dc-link voltage VDC ,the supercapacitor current iSC , the current command for the supercapac-itor I∗
SC , and the upper and lower boundaries of the hysteresis band I∗
HI
and I∗
LO during a step variation.
the soft-switching conditions for HB2 and HB3 because as long as the averagevalue of VDC is equal to the primary-referred value of VLoad, ZVS is guaranteedfor HB2 and HB3. Fig. 4.20 displays the steady-state operating waveforms whenthe power drawn from the supercapacitor is 500 W. It is clear that iSC is controlledby the two hysteresis boundaries.
To demonstrate the operation of the asymmetrical wave control described inSection 4.6.2, Fig. 4.21 shows the simulated waveforms. The fuel cell power gen-eration is decreased from 450 W to 350 W at 50 ms. It can be observed that VFC
increases while DFC drops, and the voltage across the dc-link capacitors, VC1 andVC2, changes as a result of automatic volt-seconds balance of the half-bridges. InFig. 4.22 the voltages v1 and v2 across both sides of the transformer and the cur-rent i1 through the primary winding in steady-state are shown for DFC equal to0.4. It can be seen that the current waveform i1 has a nearly flat top. This is theoptimal operating condition from the viewpoint of current stress and conductionloss.
Experimental verification
To implement the variable hysteresis band control, the upper and lower boundariesI∗HI and I∗LO as shown in Fig. 4.14 and Fig. 4.15 are first calculated by the DSP.Then, the two references are converted to analog signals by the DSP PWM module

122 Chapter 4. Topology combining dc-link and magnetic-coupling
vS2
ILO*
ISC*
IHI*
iSC
VDC
VDC
iSC IHI* ILO
* ISC*
vS2
Figure 4.20: Simulation results of the variable hysteresis band control of the two-inputconverter in Fig. 4.1, showing the steady-state operating waveforms ofthe dc-link voltage VDC , the supercapacitor current iSC , the current com-mand for the supercapacitor I∗
SC , the upper and lower boundaries of thehysteresis band I∗
HI and I∗
LO, and the drain-to-source voltage of S2 vS2,when 500 W is drawn from the supercapacitor.
and a second-order low-pass filter. An external logical gate circuit carries outthe hysteresis function. Measurement results of the key waveforms during steptransitions in I∗SC are shown in Fig. 4.23. In (a), two step increases in the currentdemand occur. In the first two segments of the waveform, the converter operatesin Mode II. It enters Mode I as the second step takes place and the hysteresis bandsize increases. Fig. 4.23(b) is a zoomed view of the step variation 2 in Fig. 4.23(a),where vS2, iSC , and the gate signal of S2 are shown. It can be observed that theswitching frequency drops when the band size increases. As shown, iSC alternatesover one switching cycle (i.e., the upper boundary of the hysteresis band is alwaysgreater than zero and the lower boundary is always less than zero). This canalso be seen in the steady-state waveforms shown in Fig. 4.24. Therefore, HB1 isoperated with ZVS.
Furthermore, experimental results of the asymmetrical wave control are pre-sented in Fig. 4.25. In (a), DFC is equal to 0.5, whereas in (b) DFC is decreasedto 0.4 because the fuel cell power is reduced (VFC rises). It is shown that withthe proposed asymmetrical wave control, the current through the transformer, i1,maintains a flat top while VFC increases. In such a way, circuit losses can beminimized under this operation condition. The experimental results in Figs. 4.23,Fig. 4.24, and Fig. 4.25 correlate to the simulated ones in Fig. 4.19, Fig. 4.20, andFig. 4.22.

4.7. Discussion and topology extension 123
DFC
VFC
VC1
VC2
DFC
VFC
VC1 VC2
Figure 4.21: Simulation results of the asymmetrical wave control of the two-input con-verter in Fig. 4.1, showing DFC , VFC , and the voltages across the dc-linkcapacitors, VC1 and VC2, during a step variation of the fuel cell powerfrom 450 W to 350 W.
4.7 Discussion and topology extension
4.7.1 Full-bridge counterpart
Semiconductor component technology has made impressive advances in the pastdecades. We have seen a rapid development of the switching device technologies.Nowadays, the ON-resistance of low-voltage power MOSFETs has achieved valuesas low as a few milliohms. In contrast, most passive components have experiencedlimited development.
The half-bridge structure shown in the proposed topology could be an im-plementation issue, especially for high-power low-voltage high-current situationswhich would require a large number of low ESR film capacitors in parallel withthe half-bridge electrolytic capacitors (C1 to C4 in Fig. 4.1).
In an effort to use more silicon and less passive components, the half-bridgesHB2 and HB3 in Fig. 4.1 can be replaced by full-bridges FB2 and FB3. Theresulting topology is illustrated in Fig. 4.26. As such, the current stress of theswitching devices is reduced to a half. The operating principle remains similar tothe half-bridge version. However, the switching condition of FB2 becomes worse.Because amplitude of i1 is now reduced to half of the value in the half-bridgesituation (refer to Fig. 4.4), the ZVS condition (4.6) no longer holds under allsituations. To ensure ZVS operation for FB2, the ripple current of iFC has to be

124 Chapter 4. Topology combining dc-link and magnetic-coupling
v1
v2
i1
DFC = 0.4
iFC
v1
v2
i1
iFC
Figure 4.22: Simulation results of the asymmetrical wave control of the two-input con-verter in Fig. 4.1 in steady-state, showing the voltages across the trans-former windings v1 and v2 and current waveforms i1 and iFC at DFC = 0.4and ϕ = 0.1π.
sufficiently large (that is, LFC has to be small). This results in a higher ripplecurrent for the dc-link.
4.7.2 Topology extension
The converter concept presented in this chapter can be further developed to anextended topology for multiport dc-dc converters. The combination of the dc-link and magnetic-coupling methods can be used to connect more power ports.Fig. 4.27 illustrates the extended topology. Such a multiport converter integratesdiverse power sources, storage elements, and loads, and would be capable of man-aging the power flow in the system by a centralized, sophisticated control strategy.By means of magnetic-coupling, power flow is controlled by phase shift, whereasby means of dc-link, power flow can be regulated by duty cycle. Whether to inte-grate a source to the system by dc-link or by magnetic-coupling depends on theisolation requirements and operating voltage.

4.7. Discussion and topology extension 125
Step increase 1 Step increase 2
Segment 1 Segment 2
Segment 3
iSC
Time: 20 ms/div
zero
iSC
Gate control signal for S2 Time: 0.2 ms/div
(b)(a)
Mode II Mode II
Mode I
10 A/div
10 A/div
40 V/div
5 V/div
vS2
Figure 4.23: Experimental results of the variable hysteresis band control of the two-input converter in Fig. 4.1, showing (a) waveform of iSC (10 A/div) duringstep transitions at a time base of 20 ms/div, and (b) zoomed view of steptransition 2 in (a), from top to bottom, Trace 1: drain-to-source voltageof S2, vS2 (40 V/div), Trace 2: iSC (10 A/div), Trace 4: gate controlsignal for S2 (5 V/div) at a time base of 0.2 ms/div.
iSC
vS2
Time: 20 µs/div
iSC
10 A/div
vS2
40 V/div
Figure 4.24: Experimental results of the variable hysteresis band control of the two-input converter in Fig. 4.1, showing stead-state waveforms, Trace 1: vS2
(40 V/div), Trace 2: iSC (10 A/div) at a time base of 20 µs/div.

126 Chapter 4. Topology combining dc-link and magnetic-coupling
Time: 20 µs/div Time: 20 µs/div
(a) (b)DFC = 0.5 DFC = 0.4
v1 50 V/div
v2 400 V/div
i1 40 A/div
10 A/diviFC
v1 50 V/div
v2 400 V/div
i1 40 A/div
10 A/diviFC
Figure 4.25: Experimental results of the asymmetrical wave control of the two-inputconverter in Fig. 4.1, showing the voltages across the transformer windingsand current waveforms at a time base of 10 µs/div, (a) DFC = 0.5 andϕ = 0.1π, (b) DFC = 0.4 and ϕ = 0.1π. In both figures, Trace 1: v1
(50 V/div), Trace 2: v2 (400 V/div), Trace 3: i1 (40 A/div), Trace 4: iFC
(10 A/div).
L1
1 : n
v2v1 RLi1
CL
LSC
Super
cap.
+
iSC iFC
VLoadVDC
VSC
iLoad
LFC
VFC
Fuel
cell
Low-voltage side High-voltage side
C1
+
N1 N2
Power flow
HB1 FB2 FB3
Figure 4.26: Full-bridge counterpart of the two-input converter topology in Fig. 4.1.
dc-link
magnetic-
coupling
Figure 4.27: Extension of the topology to a multiple-input dc-dc converter using dc-linkand magnetic-coupling.

4.8. Conclusions 127
4.8 Conclusions
A two-input bidirectional converter based on the combination of a dc-link andmagnetic-coupling has been proposed in this chapter. The converter needs onlysix power switching devices while enabling bidirectional power flow for all thepower ports. It is attractive for fuel cell and supercapacitor applications at amedium- and low-power level. Soft-switching conditions are achievable for the twotransformer-linked half-bridges in either direction of power flow. By employingan auxiliary commutation circuit such as ADRP, the third half-bridge, i.e., thesupercapacitor half-bridge, can also be soft-switched.
A control scheme, referred to as the direct fuel cell current-mode control, werediscussed to manage the power flow. The control objective is to regulate the loadvoltage and prevent load transitions from affecting the operation of the fuel cell.Simulation and experimental results validated the effectiveness of the proposedconverter topology and power flow management policy.
To achieve ZVS and reduce conduction loss for the proposed two-input con-verter, two control methods, variable hysteresis band and asymmetrical wave con-trol, have been proposed in this chapter. The variable hysteresis band controlmethod is easy to implement and does not need auxiliary devices. It changes theband size according to the average value of the supercapacitor current. In order toallow the fuel cell for different output power levels while keeping the advantagessuch as soft-switching and low conduction loss, asymmetrical wave control hasbeen introduced. The presented simulation and experiment results have verifiedthese two control methods. Moreover, a multiloop control scheme has been de-scribed. It has three feedback control loops, simultaneously regulating the outputvoltage, dc-link voltage, and fuel cell power.
The proposed topology can be replaced by its full-bridge counterpart to reducethe current stress. Moreover, it has been shown that the idea of combining adc-link and magnetic-coupling can be further developed to an extended topologyfor multiport bidirectional dc-dc converters to interface more sources, loads, andstorage elements.
However, a few things need to be bear in mind when using the topology ofFig. 4.1. The current stress of HB2 is asymmetrical. At the low-voltage side,the primary source has to have a droop characteristic. In case of two stiff volt-age sources connected at the low-voltage side, one of the two sources has to becontrolled in current.

128 Chapter 4. Topology combining dc-link and magnetic-coupling

Chapter 5
Triple-half-bridge converter
1In addition to the two topologies described in Chapter 3 and 4, this chapterpresents a further possibility – a three-port transformer-coupled triple-half-bridgebidirectional converter. As the name implies, the converter topology comprises ahigh-frequency three-winding transformer and three half-bridges, one of which isa boost half-bridge interfacing a power port with a wide operating voltage (e.g.,a supercapacitor). The three half-bridges are coupled by the transformer, therebyproviding galvanic isolation for all the power ports.
The converter is controlled by phase shift, which achieves the primary powerflow control, in combination with PWM. The particular structure of the boost half-bridge plays an essential role in accommodating the wide operating voltage rangeof the port. Voltage variations can be compensated for by operating the boosthalf-bridge, together with the other two half-bridges, at an appropriate duty cycleto keep a constant voltage across the half-bridge. The resulting waveforms appliedto the transformer windings are asymmetrical due to the automatic volt-secondsbalancing of the half-bridges. With the PWM control, it is possible to extend theZVS operating range to the entire phase shift region. Furthermore, both currentstress and conduction losses of the power switches are reduced.
Due to the half-bridge structure at all the ports, this topology is suitable formedium- and low-power applications. A fuel cell and supercapacitor generationsystem is presented as an embodiment of the proposed multiport topology.
1This chapter is based on the following papers:
H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “Triple-half-bridge bidirectionalconverter controlled by phase shift and PWM,”in Proc. IEEE Applied Power Electronics Con-ference and Exposition (APEC’06), Dallas, TX, Mar. 2006, pp. 1256–1262.
H. Tao, J. L. Duarte, and M. A. M. Hendrix, “Three-port triple-half-bridge bidirectional con-verter with zero-voltage switching,” IEEE Trans. Power Electron., to be published in 2008.
129

130 Chapter 5. Triple-half-bridge converter
5.1 Introduction
The three-port TAB converter presented in Section 2.3 has the property of be-ing bidirectional in power due to the active bridges at all the ports. The powerflow between the three ports can be managed by phase-shifting the bridge controlsignals. The major drawback of the TAB converter, however, is that it is notable to maintain soft-switching in case of wide operating voltages at the ports, forexample, when using supercapacitors and soft primary sources like fuel cells andsolar cells. In order to improve the switching conditions, a method referred to asvolt-seconds balance control has been presented in Section 3.3, where a further de-gree of freedom in control is gained by shifting the gate signals between the legs ofthe full-bridge to generate a duty ratio controlled rectangular-pulse-wave voltage.With this approach soft-switching is achievable for all the switches. However, inthe case of a small duty ratio, i.e., when the voltage at the port (a supercapacitor)is high, the current stress of the converter increases, resulting in higher conductionloss, especially in the case in which the supercapacitor is designed to support aconsiderable amount of transient power.
In this chapter, an alternative method to handle voltage variations at the port isproposed [86]. By using a boost half-bridge instead of a full-bridge or half-bridgeto interface the power port that has a dynamically changing operating voltage,the voltage variation can be compensated for by operating the boost half-bridgeat an appropriate duty cycle. The wave shapes of the resulting voltages appliedto the transformer windings are asymmetrical. Therefore, this control methodis referred to as asymmetrical wave control. It has already been applied to theconverter topology in Chapter 4. The operating principles and the control schemeare presented in Section 5.2 and Section 5.3. The topology is verified by simulationin Section 5.4.1 and with experimental results in Section 5.4.2 from a fuel cell andsupercapacitor generation system.
5.2 Topology description and analysis
5.2.1 Triple-half-bridge (THB) topology
As shown in Fig. 5.1, the proposed converter consists of two half-bridges (HB1 andHB2) coupling the fuel cell and load, and a boost half-bridge (HB3) interfacingthe supercapacitor. Note that the boost half-bridge includes the inductor LSC .A three-winding high-frequency transformer is used to link the three half-bridges.Being multifunctional, the transformer electrically isolates the three ports, andboosts the source and storage side low voltages to the load side high voltage.In addition to these, the leakage inductances (and eventually the inductances ofexternal inductors), L1, L2, and L3, are utilized as energy transfer elements.
The proposed topology inherits the advantages of the three-port TAB converterpresented in Section 2.3. The operation of HB1, HB2, and HB3 is bidirectional.This implies that power can flow in any direction for all the ports. Moreover, lowcurrent ripple can be achieved for the supercapacitor port due to the current-fedstructure of HB3. Each bridge generates a phase-angle-controlled high-frequency

5.2. Topology description and analysis 131
L1
L2
N1
v2
v1
CL RL
i1
i2
Fuel
cell
Super
cap.
Load
iFC
iLoad
VLoad
VFC
L3
v3
i3
iSCLSC
CSC
VSC
N2
N3
HB1
V2
V3
PWM3
V1
S2
S1
S5
S6
S3
S4
C3
C4
C1
C2
C5
C6
PWM4
PWM1
PWM2
PWM5
PWM6
+
+
+
+
_
+
Port 1:
Source Port 2:
Load
Port 3:
Storage
High-frequency three-winding
transformer
HB3
HB2
iS5
iS6
iS2
iS1
iS3
iS4
_
_
PFC
PSC
P2
P1
P3
PLoad
PFC = P1
PLoad = -P2
PSC = P3
Power flow
Figure 5.1: Proposed triple-half-bridge (THB) bidirectional dc-dc converter topologyfor a three-port interface.
v1
ϕ13
Reference
ϕ12
2π
2πD
2πD
2πD
L12
L31 L23
i12 , P12
i 23 ,
P23
i31 , P
31
i1
v1P1
P3
P2
v2
v3'
'
i3'
i2'
v2'
v3'
tω
Figure 5.2: Primary-referred ∆-model representation of the THB converter with thebridges replaced by equivalent voltage sources (the magnetizing inductanceis neglected), where i2, i3, v2, and v3 are referred to the primary and
denoted by i′
2, i′
3, v′
2, and v′
3, respectively.
voltage and applies it to the corresponding winding of the transformer.
The modeling method described in Section 2.8.2 can be directly applied to thistopology. Fig. 5.2 shows the simplified circuit model. Again as in Section 2.3, themodel shows a grid of inductors driven by voltage sources. The difference is thatnow the voltage sources produce asymmetrical waves.
As shown in Fig. 5.2, the voltages are shifted by ϕ12 and ϕ13 with respect tov1, and have the same duty cycle D.
Note, however, that the half-bridge configuration of the converter has limi-tations from the viewpoint of power rating. High-frequency current has to passthrough the half-bridge capacitors in full. In practice, a considerable number ofhigh-frequency film capacitors has to be connected in parallel with the electrolyticcapacitors. This is of concern in low-voltage high-current applications. There-

132 Chapter 5. Triple-half-bridge converter
fore, the converter is generally not suitable for high-power (say, higher than a fewkilowatts) applications.
5.2.2 PWM control
For the proposed THB converter, as long as the dc voltage across each bridge (V1,V2, and V3 as indicated in Fig. 5.1) is kept constant, the operation of the three-portconverter is optimal with respect to losses. It is possible to match the differentvoltage levels of the ports by choosing an appropriate numbers of turns for thewindings, i.e.,
V1/N1 = V2/N2 = V3/N3
with V1 = VFC , V2 = VLoad, and V3 = VSC/D(5.1)
where N1, N2, and N3 are the numbers of turns of the windings; D denotes theduty cycle of the upper switches S1, S3, and S5; and VFC , VSC , and VLoad arethe voltages of the fuel cell, supercapacitor, and load, respectively. It is preferablethat the fuel cell operates at the maximum power in order to achieve the maximumutilization of the fuel, whereas the load side voltage is regulated. Thus, we canassume that VFC and VLoad keep a constant operating voltage. The operatingvoltage of the supercapacitor, however, varies dynamically in a wide range. Thisvariation can be compensated for by adjusting the duty cycle while keeping V3
constant:D = VSC/V3. (5.2)
The boost half-bridge structure of HB3 plays an essential role in accommodat-ing the variation of the supercapacitor voltage. The pole voltage formed by thehalf-bridge capacitors drifts in response to the duty cycle (automatic volt-secondsbalance of half-bridges, not possible with a full-bridge). However, for a properoperation of the converter, all the three half-bridges should be operated at thesame duty cycle. As a result, in order to keep all the three voltages the same waveshape, HB1 and HB2 have to be implemented as half-bridges, not full-bridges.The resulting high-frequency voltages applied to the transformer are asymmetri-cal when D is not equal to 0.5. The waveforms are illustrated in Fig. 5.2, wherethe shadowed areas represent the volt-seconds and are all equal. The peak valuesof all the three voltages (v1, v
′
2, and v′
3) are also equal to each other (both thepositive and negative peaks).
Note that the topology proposed in this chapter differs from the topology pre-sented in [53]. The topology in [53] has two boost half-bridges, which makes itimpossible to implement the PWM control method described above, and thereforemay suffer from a limited soft-switched operating range when the input voltagevaries widely.
5.2.3 Soft-switching principle
In the ∆-model representation, because of the direct power flow link betweenany two of the three ports, the three-port model is decomposed into three two-port models. Fig. 5.3 plots the idealized operating waveforms (Vd will be defined

5.2. Topology description and analysis 133
v1
v2
i12
i23
i31
i1
i2
i3
v3
2πD
t1 t2 t4 t5t0 t3
2πD
2πD
Vd
Vd
Vd
DVd
DVd
DVd
(1-D)Vd
S6 S4 S5 S3S2 S1
(1-D)Vd
(1-D)Vd
off off off off off off
'
'
'
'
iSC'
t
12ϕ ω
13ϕ ω
Figure 5.3: Idealized operating waveforms of the triple-half-bridge converter (in thecase shown: ϕ12 > ϕ13 > 0, ϕ13 = 0.5 ϕ12, L12 = L23 = L31).
in (5.8)). The voltages applied to the inductor network determine the currentsthrough the three inductors (i12, i23, and i31), which in turn determine the currentfor each power port:
i1(t) = i12(t) − i31(t),
i′
2(t) = i23(t) − i12(t),
i′
3(t) = i31(t) − i23(t).
(5.3)
Therefore, for a given set of phase shifts and voltages the currents in the systemcan be determined.
As shown in Fig. 5.3, HB1 is switched at t0 and t3, HB2 at t2 and t5, and HB3at t1 and t4. The ZVS condition simply says that a positive current should flowthrough the switch that is going to be switched off (as explained in Section 3.2.1).For the half-bridges HB1 and HB2, the turn-off currents of the switches are onlydetermined by the half-bridge output current. Therefore, ZVS conditions for the

134 Chapter 5. Triple-half-bridge converter
switches of HB1 and HB2 can be summarized as
i1(t0) < 0, i1(t3) > 0;
i′
2(t2) < 0, i′
2(t5) > 0.(5.4)
The currents i12, i23, and i31 can be solved analytically at the switching instantssimilar to the results for the two-port system in [73], and then one can judgewhether they are positive or negative. For example, for the case shown in Fig. 5.3(ϕ12 > ϕ13 > 0) holds
i12(t0) = i12(t5) = − Vd
ωL12Dϕ12 < 0,
i12(t2) = i12(t3) =Vd
ωL12(1 − D)ϕ12 > 0,
(5.5)
i23(t2) = i23(t4) =Vd
ωL23(1 − D)(ϕ13 − ϕ12) < 0,
i23(t1) = i23(t5) = − Vd
ωL23D(ϕ13 − ϕ12) > 0,
(5.6)
i31(t1) = i31(t3) = − Vd
ωL31(1 − D)ϕ13 < 0,
i31(t0) = i31(t4) =Vd
ωL31Dϕ13 > 0,
(5.7)
where Vd represents all the primary-referred dc voltages across the bridges, i.e.,
V1 = V2N1/N2 = V3N1/N3 = Vd. (5.8)
Provided that the current through each path satisfies the ZVS condition, cer-tainly this is true for the combination of the current in two paths. For instance, byreferring to Fig. 5.3 at the switching instant (turn-off) of S1, we have i12(t3) > 0(see (5.5)) and −i31(t3) > 0 (see (5.7)), both satisfying the ZVS condition. Thesum of these two currents yields i1(t3) (that is, i1(t3) = i12(t3)−i31(t3) > 0), whichobviously complies with the ZVS condition. Similarly, the ZVS conditions for HB1and HB2 can be verified for all the switching instants (also refer to Fig. 5.3). Foroperating points different from the one in Fig. 5.3, ZVS conditions can also beproved in the same way.
For HB3, due to the boost half-bridge configuration, the turn-off currents of theswitches should be examined separately. The turn-off currents are determined byi3 and iSC . By using (5.3), (5.6), and (5.7), we can calculate the turn-off currentfor S5 and S6 as
iS5, turnoff = i3(t4) − iSC(t4) = (i31(t4) − i23(t4))N1/N3 − ISC + 0.5∆ISC ,
iS6, turnoff = −i3(t1) + iSC(t1) = −(i31(t1) − i23(t1))N1/N3 + ISC + 0.5∆ISC ,(5.9)
where ISC is the average current supplied by the supercapacitor over one switchingperiod, and ∆ISC is the amplitude of the ripple current in iSC , given by
∆ISC =VSC(V3 − VSC)
LSCfsV3, (5.10)

5.2. Topology description and analysis 135
where fs is the switching frequency. Obviously, the amplitude of i3 increaseswith the average current ISC because more power is transferred from or to thesupercapacitor port. For the boost half-bridge HB3, ZVS conditions are achievableover the entire phase shift region in either direction of power flow when operatedin square-wave mode (i.e., D = 0.5) [10] (see also Section 4.3.1). However, theturn-off currents of S5 and S6 are not equal because the boost half-bridge is notsymmetrical [10]. As can be inferred from (5.9), a high ripple current in iSC
improves the switching conditions for both S5 and S6. This can be easily realizedby choosing a lower inductance for LSC . In fact, if ∆ISC is sufficiently large, ZVSis achievable for all operating conditions even if D considerably differs from 0.5(at least in steady-state).
By making V1, V2, and V3 equal when referred to the primary and keepingthem constant, the peak values of the primary-referred voltages (v1, v
′
2, and v′
3)are equal as shown in Fig. 5.3, the positive peaks all being equal to (1−D)Vd andthe negative peaks all being equal to DVd. Therefore, the waveform of the currentthrough each inductor in the ∆-model is trapezoidal, i.e., has a flat top. In thisoptimized case, the peak current and rms loss are reduced and soft-switching isachieved over the entire operating region (−ϕmax ≤ ϕ ≤ +ϕmax).
For comparison, Fig. 5.4 illustrates the operating waveforms for different con-trol methods when the dc voltages at two ports do not match, i.e., the primary-referred voltages are not equal (V
′
2 > V1). As shown in Fig. 5.4(a), when controlledonly by the phase shift, the current has a large peak value and hard-switching alsooccurs (this has been explained in Section 3.2.1, see also Fig. 3.1 on page 67). Asshown in Fig. 5.4(b), with volt-seconds balance control (through duty ratio ad-justment of the rectangular-pulse-wave, see Section 3.2.1 and Fig. 3.4 on page 70),soft-switching can be achieved and the peak current is also decreased. It is evidentthat with the phase shift and PWM control method shown in Fig. 5.4(c) (see alsoSection 4.6.2 and Fig. 4.16 on page 119) both the peak and the rms values of thecurrent are reduced when transferring the same amount of power in an equivalentsituation.
However, for a three-port application, to maintain soft-switching, with themethod in (c) only one port voltage is allowed to vary because all the three half-bridges have to operate at the same duty cycle, whereas with the method in (b), allthe port voltages may vary by applying the volt-seconds balance control (throughduty ratio adjustment) to those ports. In addition, the method in (b) is moresuitable for higher power applications because it can use full-bridges for all theports, thereby reducing the current stress to a half when compared with the half-bridge configuration, although the current waveform does not have a flat top. Thismethod may have less high-frequency harmonics and thus may have less magneticlosses. The method in (c) is more suited to low-current or low-power applicationsbecause the half-bridge capacitors are the limiting factor. Both methods have theirown advantages and disadvantages.
In the case of a battery-backed fuel cell system, one more degree of freedomis obtained because of the near constant operating voltage of batteries. In thiscase, HB3 can be used to interface the fuel cell, allowing it to operate at differentvoltage levels (fuel cells are weak voltage sources and have a droop characteristic)

136 Chapter 5. Triple-half-bridge converter
v1
i1
ϕ
2πD
(c)
2πD
πD2
π
ϕ
v1
i1
(b)
π
π
ϕ
v1
i1
(a)
20.5 1D≤ ≤ (1 )Dϕ π ϕ π≤ ≤ −
v2
L
v1i1 ' v2
'
v2'
v2'
Figure 5.4: Comparison of different control methods in a two-port converter: (a) withonly phase shift control, (b) with phase shift and volt-seconds balance con-trol (i.e., duty ratio control of the rectangular-pulse-wave), and (c) withphase shift and PWM control (asymmetrical wave control).
while maintaining soft-switching.
5.2.4 Power flow calculation
The power flow in the three-port system has been investigated extensively in Sec-tion 2.4. The power flow in the system can be controlled by the phase shiftsbetween the half-bridges. By using the volt-seconds balance of the inductors andamp-seconds balance of the capacitors, after some manipulations the power flowin the system is calculated to be
P12 =V 2
d ϕ12
ωL12
(D − D2 − |ϕ12|
4π
),
P23 =V 2
d (ϕ13 − ϕ12)
ωL23
(D − D2 − |ϕ13 − ϕ12|
4π
),
P31 = −V 2d ϕ13
ωL31
(D − D2 − |ϕ13|
4π
),
P1 = P12 − P31,
P2 = P23 − P12,
P3 = P31 − P23,
P1 + P2 + P3 = 0,
(5.11)

5.2. Topology description and analysis 137
where ω = 2πfs; the phase shifts ϕ12 and ϕ13 are in radians; P1, P2, and P3 are thepowers delivered by the primary source, load, and storage, respectively. A positivevalue means supplying the power, whereas a negative value suggests consumingthe power. According to the above equations, when the switching frequency isfixed, the power flow is related to the phase shift, leakage inductance, and dutycycle. In a phase shift controlled three-port system, the power flow of the sourceport P1 and load port P2 can be controlled simultaneously by the two phase shiftcommands as explained in Section 3.4, while the remaining power is balanced bythe storage port – supplying or absorbing the power (with a seamless transition)according to the system’s needs.
Due to the asymmetrical voltages applied to the transformer windings, as men-tioned in Section 4.6.2, there is a limit on the maximum phase shift for the phaseshift between any two ports, being
ϕmax = min Dπ, (1 − D)π . (5.12)
On the other hand, for a designed maximum phase shift ϕmax, the range of dutycycle variation (thereby the operating range of the supercapacitor voltage) is lim-ited to
ϕmax/π ≤ D ≤ (1 − ϕmax/π). (5.13)
As stated in Section 2.7.1, the operating phase shift is usually chosen to be lessthan π/4 in order to limit the amount of reactive power in the phase shift controlledactive-bridge topology. In addition, the variation of the supercapacitor voltage isusually chosen to be within 50% to 100% of the rated voltage. Therefore, theconstraint imposed by (5.13) will not be a problem for a practical design.
Fig. 5.5 plots the power flow as a function of the phase shift and duty cycle ina two-port system. The power flow in the figure is expressed in p.u. with the basedefined as PB = V 2
d /(ωL), where L is the inductance between the two ports. Itclearly shows that as the duty cycle becomes either larger or smaller, the maximumphase shift is constrained to a smaller value and the power flow also becomes less.
5.2.5 Design guidelines
Because of the ∆-model representation, the THB converter can be analyzed qual-itatively based on a two-port system. Fig. 5.6 shows the calculated peak2 andrms current through the transformer, and also the average source current in thetwo-port system when transferring the same amount of power (the average sourcecurrent stays the same, as shown in Fig. 5.6). The parameters used for the cal-culation are Vd = 54 V, fs = 20 kHz, and L = 3.5 µH. It can be seen that bothrms current and peak current are minimized when operating in square-wave mode(D = 0.5). Therefore, limiting the dynamic range of the duty cycle (i.e., theoperating voltage range of the supercapacitor) would increase the overall systemefficiency. However, this would compromise the utilization of the energy storagecapacity of the supercapacitor.
2Here the peak is the absolute value of the positive or negative peak, taking the larger one.

138 Chapter 5. Triple-half-bridge converter
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
/ϕ π
D = 0.2, 0.8
D = 0.3, 0.7
D = 0.4, 0.6
D = 0.5
Pow
er (
p.u
.)
D = 0.5
D = 0.2, 0.8
D = 0.3, 0.7
D = 0.4, 0.6
Figure 5.5: Power flow between two ports of the THB converter versus phase shift atdifferent duty cycles D.
0.3 0.4 0.5 0.6 0.715
20
25
30
35
40
Duty Cycle (D)
Cu
rren
ts (
A)
Ipeak
Irms
Iavg
D
Ipeak
Iavg
Irms
DDuty cycle
Curr
ent
(A)
Figure 5.6: Peak (Ipeak) and rms (Irms) current through the transformer and averagesource current (Iavg) versus D when transferring the same amount of power(500 W) in the two-port system (parameters used for the calculation: Vd =54 V, fs = 20 kHz, and L = 3.5 µH).
Regarding the inductor sizing, for the same amount of transferred power alower inductance requires a smaller operating phase shift, which results in a lowercirculating current3 (see Section 2.7.1). Therefore, the chosen inductances of theTHB converter should be small. However, this will increase the sensitivity of thepower flow to the phase shift and thus requires a higher accuracy/resolution of
3This is because with phase shift and PWM control the voltages are matched and the currentshave a flat top.

5.3. Control scheme and power flow management 139
0.3 0.4 0.5 0.6 0.70.12
0.14
0.16
0.18
0.2
Max
imum
induct
ance
(p.u
.)
Maximum or minimum operating duty cycle (Dmax or Dmin)
Inductance per unit (p.u.) base:2
*
d
B
VL
Pω=
Figure 5.7: Maximum allowed inductance as a function of the maximum/minimumoperating duty cycle (Dmax or Dmin) in the two-port system.
the control circuit. To allow for a desired maximum power flow P ∗ in the two-port system, the maximum inductance is determined by the maximum/minimumoperating duty cycle (Dmax or Dmin) as shown in Fig. 5.7 (choose the smallerinductance value), where the inductance is expressed in p.u. with the base definedas LB = V 2
d /(ωP ∗). With phase shift and PWM control, a lower inductance leadsto a lower current stress [73]. The inductor sizing is a trade-off between the systemloss and the controllability. An operating phase shift between 15 and 45 degreesis recommended.
5.3 Control scheme and power flow management
Similar to the TAB converter described in Section 2.8.2, the control system showsa typical two-input two-output plant. Two degrees of freedom (i.e., ϕ12 and ϕ13)are available for controlling the power flow in the system. The control objectivesare to keep a near-constant load voltage and to operate the primary source, the fuelcell, at a near-constant power (for example, the maximum power of the source).The control system decouples the primary source dynamically from the load – thepower/current of the source is controlled to a specified value no matter what therest of the system is doing.
Three variables can be used as the control inputs, namely the phase shiftsϕ12 and ϕ13, and the duty cycle D. The power flow at the three ports can befully controlled by the phase shift commands, whereas the control of D is only forachieving soft-switching. Since the operating voltage of the supercapacitor variesvery slowly compared with other system variables, the adjustment of D has littleimpact on the system dynamics (the power flow control).

140 Chapter 5. Triple-half-bridge converter
Gc1(s)THB
converter
Gc2(s)
PFC
PFC
VLoad
VFC
IFC
Multiply
VLoad
Limiter
V3
iFC
Phase-
shifted
PWM
PWM
controller
SOC
manager
PFC
ϕ12
D
ϕ13
VSC
LPF
PWM1
PWM2
PWM3
PWM4
PWM5
PWM6
iFCVFCVSC
VLoad
V3
+
+
-
-
*
*
**
Figure 5.8: Proposed multiloop control scheme for the THB converter.
The modeling of the three-port converter has been described in Section 2.8.2.The same method can be applied to the THB converter. The three-port convertercan be modeled, using an averaging method, as three controlled dc current sourceswhose amplitudes are determined by the two phase shifts. The current sourcefunctions can be derived by using the power flow equations in (5.11).
As shown in Fig. 5.8, the proposed control scheme employs two PI controllersthat are devoted to the regulation of VLoad and PFC , respectively. This con-trol strategy is similar to the one used in Section 3.4 for the TAB converter (seeFig. 3.8). The controllers are implemented as
Gc1(s) = K11 + τ1s
τ1sand Gc2(s) = K2
1 + τ2s
τ2s, (5.14)
where K1 = 1 and K2 = 80 are the proportional gains, and τ1 = 0.5 ms andτ2 = 0.2 ms are the time constants. A LPF having a time constant of τI = 1 msis included in the control scheme for smoothing the measured current iFC .
The PWM controller can be an open-loop feedforward using (5.2). Alterna-tively, a third PI controller with narrow bandwidth (since D changes very slowly)can be used to regulate V3 instead of the open-loop feedforward, or a combinationof a PI control and a feedforward. The control scheme is fully digitalized andimplemented with a digital signal processor (DSP).
5.4 Simulation and experimental verifications
5.4.1 Simulation results
To verify the proposed THB topology and our theoretical considerations, the con-verter and control scheme were simulated with PSIM7.0. The simulation anddesign parameters are listed in Table 5.1. The fuel cell has a nominal operatingvoltage of 54 V. A 400 V dc output is desired in order to supply a single-phase

5.4. Simulation and experimental verifications 141
Table 5.1: Circuit parameters of the THB converter
Description Symbol ValueFuel cell voltage VFC 54 VLoad side dc voltage VLoad 400 VDc voltage across HB3 V3 42 VSupercapacitor voltage VSC 12.6 V to 29.4 VMaximum duty cycle Dmax 0.7Minimum duty cycle Dmin 0.3Transformer turns N1 : N2 : N3 5:38:4Magnetic core E65 material Fi324Magnetizing inductance LM 84 µHInductance L1 1.15 µHInductance L2 65.2 µHInductance L3 0.723 µHInductance LSC 30 µHSwitching frequency fs 20 kHzLoad power PLoad 1 kW maximumFuel cell power PFC 1 kW maximumPI controller Gc1(s) K1, τ1 K1 = 1, τ1 = 0.5 msPI controller Gc2(s) K2, τ2 K2 = 80, τ2 = 0.2 msLPF time constant τI 1.0 msPhase shift modulator gain KM π/3750
inverter (230 V, 50 Hz ac output). The dc voltage across HB3, V3, is chosen tobe 42 V. The inductances L1, L2, and L3 can be designed in such a way thatthe power rating of each port is identical, i.e., in the ∆-model L12 = L23 = L31
(primary-referred values). In order to limit the rms and peak current through thetransformer when operating at a small or large duty cycle (see Fig. 5.6), the max-imum and minimum limiting duty cycles are set to be Dmax = 0.7 (for maximumVSC) and Dmin = 0.3 (for minimum VSC), respectively. For a supercapacitor, asimple calculation shows that such an operating range would utilize over 80% ofthe energy storage capacity of the supercapacitor.
Fig. 5.9(a) shows the simulated results of the steady-state operation at ϕ12 =0.1π, ϕ13 = 0.05π, and D = 0.6 (VSC = 25.2 V). Fig. 5.9(b) presents the results atϕ12 = 0.1π, ϕ13 = 0.05π, and D = 0.4 (VSC = 16.8 V). The parasitic parametersof the circuit (including the ON-resistance of the switches, ESR of the capacitors,winding resistances, etc.) were also taken into account for the simulation. Thewaveforms shown in both figures are asymmetrical and are consistent with thetheoretical analysis (see, e.g., Fig. 5.3).
To show the effectiveness of the control scheme, Fig. 5.10 displays the simulatedresults of closed-loop power flow control under step load changes. The changeswere carried out by switching on and off an extra resistor in parallel with theload. In Fig. 5.10(a) the converter was operated at 1 kW and a step-increase of250 W in the load demand was applied at 30 ms, whereas Fig. 5.10(b) shows the

142 Chapter 5. Triple-half-bridge converter
v1
v2
v3
i1
i2
i3
D = 0.4
(V)
(V)
(V)
(A)
(A)
(A)
v1
v2
v3
i1
i2
i3
D = 0.6
(b)(a)
Figure 5.9: Simulation results at steady state of the THB converter with (a) ϕ12 = 0.1π,ϕ13 = 0.05π, D = 0.6, and (b) ϕ12 = 0.1π, ϕ13 = 0.05π, D = 0.4, showingthe voltages (v1, v2, and v3) generated by the three half-bridges and thecorresponding currents (i1, i2, and i3) through the transformer windings.
step-decrease in the load demand from 1 kW to 750 W initiated at 30 ms. Ascan be seen, in both simulated cases the power delivered by the fuel cell remainsunchanged at 1 kW after some transients. The surplus and deficiency in the loadpower demand are managed by the supercapacitor. Since the voltages at the threeports remain constant during the load variation, the currents are representativefor the powers. Note that the high-frequency ripples in iFC and iLoad are alreadyfiltered out.
5.4.2 Experimental results
A laboratory prototype was constructed, laid out for 1 kW maximum power at20 kHz switching frequency. Basically, to prove the converter concept the hardwarefor testing the TAB converter in Section 3.7.2 was reused for this experiment,including the three-port transformer and the switching bridges. The switchingdevices were implemented with power MOSFETs for all the three bridges.
A PEM fuel cell (maximum 1 kW) was used as the generator (as also used fortesting the TAB converter). The fuel cell has a built-in dc-dc converter and pro-vides a roughly regulated output. The control scheme was digitally implementedwith a TMS320F2812 DSP controller from Texas Instruments.
To illustrate the steady-state operating waveforms, measurement results of the

5.4. Simulation and experimental verifications 143
iSC
(a) (b)
Step increase Step decrease
iFC
iLoad
iSC
iFC
iLoad
(A)
(A)
(A)
Figure 5.10: Simulation results of the power flow control in the THB converter, showingthe current waveforms iFC , iLoad, and iSC : (a) in response to a stepincrease of 250 W in the load, and (b) in response to a step decrease of250 W in the load.
Table 5.2: Summary of the operating points of the shown measurement results
ϕ12 ϕ13 D PFC
(P1)PLoad
(−P2)PSC
(P3)Fig. 5.11 0.1π 0.05π 0.6 > 0 > 0 = 0Fig. 5.12 0.1π 0.1π 0.6 > 0 > 0 < 0Fig. 5.13 0.1π 0.05π 0.5 > 0 > 0 = 0Fig. 5.14 0.1π 0.05π 0.4 > 0 > 0 = 0Fig. 5.15 0.1π 0 0.4 > 0 > 0 > 0
voltages generated by the three half-bridges (v1, v2, and v3) and the correspondingcurrent waveforms (i1, i2, and i3) at a variety of operating points are shown inFig. 5.11 to Fig. 5.15. Table 5.2 summarizes the operating points for all thepresented measurement results. As can be seen, the current waveforms have anear-flat top under all operating conditions. The waveforms are asymmetricalwhen D is different from 0.5. The volt-seconds are automatically balanced by thehalf-bridges. A comparison between the simulation (see Fig. 5.9) and experimentalwaveforms shows the consistency between the simulated and measured results.
The power flow control in response to step load variations under closed-loopoperation is shown in Fig. 5.16, where (a) shows the currents of the three portswhen a step increase in the load occurs, and (b) shows the response waveformswhen the load is step-reduced. The experiments were done by shifting between twoset points of an electronic load operating in constant resistance mode. The outputvoltage is regulated to a constant value. As can be seen, the desired power flowmanagement is achieved, i.e., drawing a constant power from the fuel cell whilevariations in the load demand take place. The high-frequency ripples in the fuelcell side and load side currents iFC and iLoad were filtered out by the capacitorsin parallel with the fuel cell and load bridges (see Fig. 5.1) and the inductances of

144 Chapter 5. Triple-half-bridge converter
(a) (b)
Time: 10 µs/divD = 0.6
v1 50 V/div
v2 200 V/div
v3 50 V/div
Time: 10 µs/divD = 0.6
40 A/div
i3 20 A/div
i1
i2 4 A/div
Figure 5.11: Experimental results at steady-state operation of the THB converter withϕ12 = 0.1π, ϕ13 = 0.05π, D = 0.6, showing (a) voltages generated by thehalf-bridges, and (b) currents through the transformer windings.
(a) (b)
Time: 10 µs/divD = 0.6
v1 50 V/div
v2 200 V/div
v3 50 V/div
Time: 10 µs/divD = 0.6
40 A/div
i3 20 A/div
i1
i2 4 A/div
Figure 5.12: Experimental results at steady-state operation of the THB converter withϕ12 = 0.1π, ϕ13 = 0.1π, D = 0.6, showing (a) voltages generated by thehalf-bridges, and (b) currents through the transformer windings.
the connecting wires between the power converter and the sources.Concerning the efficiency, soft-switching that can be achieved without complex
auxiliary hardware, as demonstrated here, is appealing. Soft-switching reduces theconverter switching losses and enables higher switching frequencies. The proposedsoft-switching method has been tested with a low-power two-port converter in [73]and an improvement of the efficiency has been reported. For the three-port con-verter, a similar efficiency improvement is obtained. The efficiency of the powerstage of the THB converter prototype at different VSC (thus different D) is shownin Fig. 5.174. With phase shift and PWM control, a substantial increment in the
4The efficiency only concerns the power stage. The losses of the auxiliary circuits are notincluded, e.g., the losses in the internal power supply, MOSFET drivers, processor supply, etc.This measurement has a limited accuracy due to the instruments used and the listed efficienciescould be over-estimated.

5.4. Simulation and experimental verifications 145
(a) (b)
Time: 10 µs/divD = 0.5
v1 50 V/div
v2 200 V/div
v3 50 V/div
Time: 10 µs/divD = 0.5
40 A/div
i3 20 A/div
i1
i2 4 A/div
Figure 5.13: Experimental results at steady-state operation of the THB converter withϕ12 = 0.1π, ϕ13 = 0.05π, D = 0.5, showing (a) voltages generated by thehalf-bridges, and (b) currents through the transformer windings.
(a) (b)
Time: 10 µs/divD = 0.4
v1 50 V/div
v2
200 V/div
v3 50 V/div
Time: 10 µs/divD = 0.4
40 A/div
i3 20 A/div
i1
i2 4 A/div
Figure 5.14: Experimental results at steady-state operation of the THB converter withϕ12 = 0.1π, ϕ13 = 0.05π, D = 0.4, showing (a) voltages generated by thehalf-bridges, and (b) currents through the transformer windings.
efficiency can be observed. In all the measured operating points, the power of theprimary source is kept at around 410 W and the load RL is a 420 Ω resistor. Theconverter was operated with closed-loop control. The efficiency η is calculated asη = PLoad/(PFC + PSC)× 100%, where PLoad is the power consumed by the load,and PFC and PSC are the powers delivered by the fuel cell and the supercapacitor,respectively (see also Fig. 5.1 for the reference directions). In the measured casesin Fig. 5.17, the average power from the storage port is low, but stays positive5.Under this operating condition, the PWM control is especially important becauseit can keep rms value of the current of the storage port i3 very low (as shownin Fig. 5.3), thus significantly reducing the rms loss (as the switch voltages arequite low, rms current based losses usually dominate). If the PWM control is not
5For other situations, (8.12) on page 235 can be used to calculate the efficiency.

146 Chapter 5. Triple-half-bridge converter
(a) (b)
Time: 10 µs/div Time: 10 µs/divD = 0.4
v1 50 V/div
v2
200 V/div
v3 50 V/div
D = 0.4
40 A/div
i3 20 A/div
i1
i2 4 A/div
Figure 5.15: Experimental results at steady-state operation of the THB converter withϕ12 = 0.1π, ϕ13 = 0, D = 0.4, showing (a) voltages generated by thehalf-bridges, and (b) currents through the transformer windings.
(a) (b)
Time: 5 ms/div Time: 5 ms/div
iFC 20 A/div
2 A/div
20 A/diviSC
iLoad
Step increaseStep decrease
iFC 20 A/div
2 A/div
20 A/diviSC
iLoad
Figure 5.16: Experimental results of the power flow management in the THB converterwith closed-loop control, showing (a) response to a step increase in theload, and (b) response to a step decrease in the load.
applied, i3 will have a near-triangular shape when the storage port voltage V3 iseither high or low (far from the matched value, see also Fig. 5.4). This results ina very high rms value of i3 (though the real power of PSC is almost zero), leadingto the decrease of the efficiency, as shown in Fig. 5.17.
5.5 Conclusions
As an alternative to the topologies proposed in the previous chapters, a three-portbidirectional converter implemented with three half-bridges has been proposed inthis chapter. The topology comprises a high-frequency three-winding transformerand three half-bridges, one of which is a boost half-bridge interfacing a power portwith a wide operating voltage.

5.5. Conclusions 147
THB converter power stage efficiency
vs supercapacitor voltage
60,0%
65,0%
70,0%
75,0%
80,0%
85,0%
90,0%
95,0%
11 13 15 17 19 21 23 25 27 29 31
Supercapacitor voltage (V)
Eff
icie
ncy
Phase shift and PWM control Only phase shift control
Figure 5.17: Efficiency of the THB converter (only concerning the power stage, i.e.,the three bridges and transformer) with phase shift and PWM controland only with phase shift control at different operating voltages of thesupercapacitor when the fuel cell power PFC = 410 W and the load RL =420 Ω.
A control method has been presented for achieving soft-switching over a wideinput range. In addition to the phase shift control, a PWM control method isapplied to the triple-half-bridge converter. The particular structure of the boosthalf-bridge makes it possible to handle voltage variations at the port by adjustingthe duty cycle of all the three half-bridges. With this approach, the operation ofthe converter is optimized with both current stress and rms loss being reduced.Moreover, soft-switching conditions for all switches are achievable over the entirephase shift region. However, to maintain soft-switching, this method only allowsone port voltage to vary because all the three half-bridges have to operate at thesame duty cycle. The efficiency of the converter was checked. The results show asubstantial improvement in the efficiency with phase shift and PWM control whencompared with only phase shift control.
The proposed triple-half-bridge topology is suited for low-current or low-powerapplications because the half-bridge capacitors are the limiting factor. A controlscheme based on multiple PI regulators manages the power flow, regulates theoutput, and adjusts the duty cycle in response to the varying voltage on the port.Simulation and experimental results were presented, validating the effectiveness ofthe proposed converter and its control scheme.

148 Chapter 5. Triple-half-bridge converter

Chapter 6
Family of multiportbidirectional converters
1In the previous chapters, we have presented several converter topologies for energymanagement in three-port systems. It is advantageous to extrapolate the three-port structure toward a more complex structure – a converter having N powerports. A topological study on this type of converters leads to a family of multiportbidirectional converters.
In this chapter we present a topology concept that uses a combination of dc-link and magnetic-coupling from which a number of converter topologies can bededuced. This structure has multiple interfacing ports. The resulting convertershave a low number of power devices while supporting bidirectional power flow forall the ports. The proposed general topology and basic bidirectional switchingcells show several possibilities to construct a multiport converter, e.g., to providea solution for harvesting energy from diverse sources. Furthermore, based onthe interleaving technology, topologies for high-power applications can also beprovided.
The control of these converters by a single digital processor is possible. Cen-tralized control eliminates complicated communication structures that would benecessary in the conventional approach that uses multiple converters. Power flowmanagement in such a complex system will be briefly addressed as well.
6.1 Introduction
Recent development in alternative energy sources is challenging for the design ofpower conversion systems. The interest in multiport power converters for sustain-able energy generation and electric vehicles is growing. These applications have
1Part of this chapter has been published in:
H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “Family of multiport bidirectionalDC-DC converters,” IEE Proceeding Electric Power Applications, vol. 153, no. 3, pp. 451–458,May 2006.
149

150 Chapter 6. Family of multiport bidirectional converters
in common that the system has to operate with multiple inputs and/or outputs.Future power systems will require interfacing of various energy sources. To enablemultisource technology, a multiport power converter is of practical use. Ideally, amultiport power supply accommodates a variety of sources and combines their ad-vantages. This is a promising idea when centralized control and integrated powerconversion are considered desirable, especially for small, on-site generation sys-tems. With multiple inputs, the energy source is diversified and reliability andutilization of sustainable sources can thereby be increased.
The need for multiport dc-dc converters has attracted research interest. As wehave discussed in Section 1.3.3, the methods to combine multiple sources includeputting sources in series, paralleling sources via a dc bus, using flux additivity bya multiwinding transformer, the time-sharing concept, etc.
Based on a general topology using a combination of a dc-link and magnetic-coupling, a family of multiport bidirectional dc-dc converters is presented in thischapter. Besides hybrid power systems, the topology is also of potential interestin applications that have a multiport structure, such as uninterruptible powersupplies (UPS), electric vehicles, hybrid energy storage systems, etc.
6.2 Multiport versus conventional structure
In a hybrid electricity generation system, a source port delivers power, a loadport consumes power, while a storage port is bidirectional. For applications wherean energy storage element is necessary, at least the port that connects to thestorage should be bidirectional. For general purpose, all ports are considered to bebidirectional. Therefore, it is not essential to explicitly distinguish inputs (sources)or outputs (loads). Accordingly, the converter presented in this chapter is nameda multiport converter instead of multiple-input or multiple-output converter.
Basically, there are two structures suitable for multisource systems. In theconventional structure shown in Fig. 6.1, to interconnect multiple sources, thereusually exists a common high-voltage or low-voltage dc bus. Separate dc-dc con-version stages are used for individual sources. Those converters are electricallylinked together at the dc bus and are controlled independently. In some systems,a communication bus may be included to exchange information and manage powerflow between the sources. Several front-end dc-dc converters have been developedto interface energy sources (see the overview in Section 1.3.2). For interfacing stor-age devices, many papers have contributed to the design of bidirectional converters(see the overview in Section 1.3.1). However, a drawback of this structure lies inthe fact that it is inherently complex and has a low efficiency due to the multipleconversion stages and communication devices between individual converters.
As shown in Fig. 6.2, we propose a multiport system structure. This is differentfrom the conventional one. The whole system is viewed as a single power processingstage that has multiple interfacing ports. It is shown that the number of stagesin the conventional structure can be reduced by recognizing redundancy in thepower processing. For multisource generation systems, the multiport concept canprovide a reduced parts-count solution compared with the conventional structure

6.3. Multiport bidirectional converters 151
Fuel cell
Photovoltaic
ac
loads
Batteries
dc bus ac bus
Supercap.
Figure 6.1: Conventional structure for multisource electricity generation systems.
Fuel cell
Batteries
Supercap.
Photovoltaic
ac
loads
ac bus
Multiport
bidirectional
dc-dc
converter
Figure 6.2: Proposed multiport structure for multisource electricity generation systems.
that uses multiple separate converters.The multiport topology has an advantage over the conventional approach. In
a multiport converter, it is possible to share the system resources (i.e., conversiondevices) and to remove the redundancy. As a result, the overall system efficiencymay be improved by eliminating redundant power stages and their associatedlosses. A multiport converter is particularly interesting for on-site, small scale,residential power generation systems where energy is to be harvested from a varietyof sources in combination and a means of energy storage is available.
Table 6.1 lists a comparison of the two structures. The multiport structureis promising from the viewpoints of centralized control, integration, and compactpackaging. However, a multiport converter has a complex topology, thereforeposing many design challenges, especially the control design.
6.3 Multiport bidirectional converters
6.3.1 General multiport converter topology
A basic classification of the energy flow link between power ports can be:• dc-link, by means of coupling at a dc buffer capacitor;
• high-frequency ac-link (HF ac-link), in this thesis called magnetic-coupling;
• low-frequency ac-link (LF ac-link), at a grid frequency, e.g., 50 Hz.

152 Chapter 6. Family of multiport bidirectional converters
Table 6.1: Comparison of conventional and multiport structure
Description Conventional structure Multiport structureNeed for a common dc bus Yes NoPower conversion stages More than one SingleControl scheme Separate control Centralized controlPower flow management Complicated, slow Simple, fastTransformer Multiple Single, multiwindingImplementation effort Low (standard) High (custom)
Electrical isolation between power ports is possible with either the HF or LF ac-link, whereas the dc-link provides no isolation. With the LF ac-link an isolationtransformer is not always necessary when the voltages are matched. The LF ac-link relates to parallel operation of PWM inverters, i.e., active and reactive powercontrol of paralleled ac systems. We will only focus on the dc-link and magnetic-coupling in this chapter.
Conceptually, both the dc-link and magnetic-coupling approaches allow bidi-rectional power flow and can incorporate diverse sources, an example of which hasbeen described in Section 4.2. The dc-link is a method where several sources arelinked together through switching cells (choppers) to a dc bus where energy isbuffered by means of capacitors. Current-mode or voltage-mode control may beapplied to regulate source currents or the dc-link voltage. However, the dc-linkcannot efficiently handle a wide variety of port voltages. Therefore, the operatingvoltage of the power ports should be close to each other to avoid large buck/boostconversion ratios. On the other hand, with the magnetic-coupling method sourcesare interconnected through a multiwinding transformer. This makes it possible toconnect power ports having quite different operating voltage levels. In additionto this, the power ports are galvanically isolated, which could be a compulsoryrequirement for safety reasons in some applications.
Taking into account the merits and demerits of these two approaches, thischapter presents a general multiport bidirectional dc-dc converter which combinesa dc-link with magnetic-coupling. This reflects that the proposed schemes aresuitable for different applications. Fig. 6.3 shows the general topology, where thesystem has X different dc buses (i.e., dc bus 1, dc bus 2, . . . , dc bus X). Thestructure of the basic bidirectional switching cells is presented in Fig. 6.4.
As shown in Fig. 6.3, a multiwinding transformer couples X dc buses withindividual windings (i.e., N1, N2, . . ., NX). Each dc bus can be viewed as asubsystem within which several directly connected switching cells (i.e., Cell1.1,Cell1.2, . . ., Cell1.K1 for dc bus 1, . . .) are tied together at the dc-link capacitors.Each switching cell comprises two active switches (i.e., S1.1A and S1.1B for Cell1.1,. . .) and an inductor (i.e., L1.1 for Cell1.1 . . .). The switching cell (see also Cell Ain Fig. 6.4) is usually referred to as buck/boost bidirectional switching cell (alsoknown as two-quadrant buck/boost converter and canonical switching cell [87]).In addition, an extra source (i.e., V1, V2, . . ., VX , as shown in Fig. 6.3), can bedirectly coupled to the dc buses, thereby defining the dc bus voltage. The unique

6.3. Multiport bidirectional converters 153
mag
net
ic-
cou
pli
ng
dc
bu
s 1
V1
.1
LS
1L
1.1
C1A
C1B
S1
.1A
S1
.1B
V1
.2
L1
.2
S1.2A
S1.2B
V1
.K1
L1.K
1
S1
.K1A
S1.K
1B
dc
bu
s 2
V2
.1
LS
2L
2.1
C2A
C2B
S2
.1A
S2
.1B
V2.2
L2.2
S2.2A
S2.2B
V2.K
2
L2.K
2
S2.K
2A
S2
.K2B
N2
N1
NX
V2
V1
Cel
l 1.1
Cel
l 1.2
Cel
l 1.K
1
dc
bu
s X
VX
.1
LSX
LX
.1
CXA
CXB
SX
.1A
SX
.1B
VX
.2
LX
.2
SX
.2A
SX
.2B
VX.KX
LX.KX
SX.KXA
SX.KXB
VX
Cel
l 2.K
2C
ell 2
.2C
ell 2
.1
Cel
l X.KX
Cel
l X.2
Cel
l X.1
,
+
,,
,et
c.,
+
+
++
+
++
+
+
++
+
+
+
dc
sourc
e dc
load
bat
teri
es
super
capfu
el c
ells
photo
volt
aics
Figure 6.3: Proposed general topology with combination of dc-link and magnetic-coupling for multiport bidirectional dc-dc converters.

154 Chapter 6. Family of multiport bidirectional converters
structure of the boost half-bridge (i.e., Cell1.1, Cell2.1, . . ., CellN.1, see also Cell Din Fig. 6.4) makes it multifunctional: in addition to interfacing one source, it isalso used to generate a high-frequency voltage. The capacitors at each dc bus (i.e.,C1A and C1B , C2A and C2B , . . ., CXA and CXB) are acting as both the dc-linkand half-bridge capacitors.
The boost half-bridge cell, normally operates at 50% fixed duty cycle in order toproduce a square-wave voltage. In some cases it can be operated at a variable dutycycle, for example, generating an asymmetrical wave to extend the soft-switchingrange (see Section 4.6.2 and 5.2.2).
As a result of the presence of the boost half-bridges at the dc buses, in thetopology shown in Fig. 6.3 the dc-link and the magnetic-coupling structures aresuccessfully combined without the penalty of extra conversions or additional powerswitches. The topology has the property of being bidirectional in power for all theports due to the active switching cells associated with them. In this bidirectionaltopology, the maximum number of switches is no more than twice of the powerports incorporated. For instance, to interface three power ports, a maximum ofsix switches is needed. For unidirectional ports, some switches could be replacedby power diodes.
Furthermore, the structure in Fig. 6.3 is open to the addition of more portsvia either dc buses or transformer windings. Further sources can be incorporatedinto the system by individual switching cells. Whether to integrate a source to thesystem by the dc-link or via magnetic-coupling depends on isolation requirementsand the source’s operating voltage. Sources having nearly the same operatingvoltages can be interconnected at the same dc bus.
In short, the whole power conversion system could be viewed as a “black box”that has several power ports. As already stated in Section 6.2, each port of theconverter is bidirectional in power. Consequently, what is connected to the portscan be a voltage-type dc generator, storage, or load. The topology shows flexibilityin incorporating diverse inputs/outputs, for example, fuel cells, batteries, super-capacitors, PVs, generic loads (e.g., inverters), etc. However, only voltage-typedc sources are considered in this topology. Further current-type storage elementslike superconducting magnetic energy storage (SMES) devices may also be incor-porated into the system via the dc buses by individual switching bridges.
6.3.2 Basic bidirectional switching cells
A multiport bidirectional converter can be constructed from the basic bidirectionalswitching cells in Fig. 6.4. The switching cells include the buck/boost, half-bridge,full-bridge, boost half-bridge, and boost full-bridge cell. The switching cells used inthe general topology comprise the buck/boost, boost half-bridge, and half-bridgecell. The half-bridge, however, is not explicitly shown in the topology of Fig. 6.3.It emerges when the source (and the inductor) connected to the boost half-bridgeis removed and there is a source directly coupled to the dc bus which is associatedwith a transformer winding. This is shown in Section 6.3.3. The full-bridge iscertainly a basic switching cell, although it is not shown in Fig. 6.3.

6.3. Multiport bidirectional converters 155
(a) Buck/boost
(Cell A)
(b) Half-bridge
(Cell B)
(c) Full-bridge
(Cell C)(d) Boost half-bridge
(Cell D)
+
+
+
+
+
(e) Boost full-bridge
(Cell E)
Multiport
bidirectional
dc-dc
converters
Figure 6.4: Basic bidirectional switching cells used for constructing multiport bidirec-tional converters.
The use of the boost half-bridge in the system brings many benefits becauseof its multiple functions. It plays an essential role in combining the dc-link withmagnetic-coupling. As a result, the converter becomes more compact and uses lesspower devices. However, as discussed in Section 4.2.2, the structure of the boosthalf-bridge is asymmetrical and current stresses of the upper and low switchingdevices are not the same. Also shown in Fig. 6.4 is the boost full-bridge, which isthe full-bridge counterpart of the boost half-bridge, as explained in Section 4.7.
For high-power applications, a three-phase (or polyphase) interleaved structureof these switching cells is more promising because of much lower current rippleowing to the interleaving effect. This will be returned to in Section 6.7.
Other switching cells such as buck and buck-boost and their derivatives cer-tainly can be used to interface a source. Since a smooth, continuous current isoften preferred for most sources (like fuel cells, batteries, and PVs), they are notincluded in the basic bidirectional switching cells for the reason that their inputcurrents are pulsating and discontinuous.
6.3.3 Three-port converter – an example
To illustrate possible embodiments of the proposed topology concept, a set of three-port converters deduced from the general topology is presented in this section.There are several possibilities.
Fig. 6.5 illustrates a converter topology in which the primary source, storage,

156 Chapter 6. Family of multiport bidirectional converters
dc-link
Load
Source Storage+ +
+
Figure 6.5: Dc-linked three-port converter (Topology A).
and load are linked by a dc bus. Being the simplest structure, this topology hasbeen implemented in fuel cell powered electric vehicles where high-voltage fuel cellsand storage elements (a few hundred volts, e.g., 300 V) are used [13]. However, thismay raise problems, since high-voltage storage devices like batteries are difficultto manage, especially to maintain a tight charge balance. A key feature of thistopology is convenient decoupling of control: the source side switching cell controlsthe source current independently, while the storage side switching cell regulatesthe dc bus (load) voltage. Since all the switching cells are directly connected inparallel, a standard switch module is applicable (e.g., a full-bridge module, or athree-phase bridge module for four-port applications).
Fig. 6.6 shows the magnetically coupled three-port converter (the TAB con-verter described in Section 2.3). The half-bridges can be replaced with full-bridges.In addition to galvanic isolation, this topology has the advantage of easily match-ing different port voltage levels in the overall system. Each bridge generates ahigh-frequency voltage (square-wave in the simplest case) with a controlled phaseshift angle with respect to the primary side. The voltages presented to the wind-ings have the same frequency. Power flow between the three ports is controlled bythe phase shifts. This circuit can be operated with soft-switching, provided thatthe operating voltage at each port is kept near-constant. However, when the portoperating voltage varies widely, such as with supercapacitors, the soft-switchedoperating range will be reduced. In Section 3.3, a method has been proposed toextend the soft-switching range by controlling the duty ratio of the rectangular-pulse-wave voltage inversely proportional to the port voltage.
A converter topology combining a dc-link and magnetic-coupling is illustratedin Fig. 6.7 (presented in Section 4.2). This circuit is a subset of the topology shownin Fig. 6.3. In this converter the primary source and storage are interconnectedthrough a dc bus, since both of them are low-voltage devices and their operatingvoltages are close to each other. The load port is incorporated through a switchingbridge and transformer winding. Six switches are used and all the three powerports are bidirectional. This system is suitable for applications where the lowoperating voltages of the primary source and storage need to be boosted to matcha high load-side voltage, e.g., 400 V, to supply an inverter that produces an acoutput. A full-bridge version of this topology was also discussed in Section 4.7. It

6.3. Multiport bidirectional converters 157
magnetic-
coupling
Load
Storage
+
+
+
Source
Figure 6.6: Magnetically-coupled three-port converter (Topology B).
Source
Load
Low-voltage sideHigh-voltage side
+ +
+
Storage
Figure 6.7: Three-port converter combining dc-link and magnetic-coupling (Topol-ogy C).
cuts the current stress in half, but worsens soft-switching conditions.
The converter topology of Fig. 6.8 differs from that in Fig. 6.7 in that it connectsthe storage directly to the dc-bus, resulting in a simpler configuration. In this case,only four power switches are needed. However, if a supercapacitor is chosen as thestorage medium, the energy storage capacity of the supercapacitor cannot be fullyutilized, since the dc-bus voltage (i.e., the terminal voltage of the storage) shouldnot vary over a wide range. An example of this converter intended for electricvehicle applications has been reported recently in [80].
Another possibility to use the boost half-bridge to realize a current-fed port forthe storage device or primary source is illustrated in Fig. 6.9. We have discussedthis topology in Section 5.2 (the triple-half-bridge converter). In particular, withthis structure the voltage variation on one port is accommodated by adjustingthe duty cycle of the boost half-bridge to generate an asymmetrical wave volt-age (see Section 5.2.2). With this approach, the soft-switched operating range

158 Chapter 6. Family of multiport bidirectional converters
Source
LoadStorage
Low-voltage side High-voltage side
+
+ +
Figure 6.8: Three-port converter with storage directly coupled to the dc-bus (Topol-ogy D).
magnetic-
coupling
Storage
Load
+
+
Source+
Figure 6.9: Magnetically-coupled three-port converter with one current-fed port(Topology E).
is extended, and both the current stress and the conduction losses of the powerswitches are reduced. This is possible because voltage variations are compensatedfor by operating at an appropriate duty cycle, resulting in lower peak currents.
As a variant of the converter in Fig. 6.9, the source port can also use the boosthalf-bridge. This is depicted in Fig. 6.10 and is advantageous for applications inwhich the current ripple of the primary source is strictly limited. The operatingprinciples are similar to those of the topology in Fig. 6.9. However, the asymmet-rical wave control cannot be applied, as discussed in Section 5.2.2. This three-porttopology has been implemented for a hybrid energy storage system and is reportedin a recent publication [53].
In addition to the above mentioned converter topologies, there are probablyother possibilities to construct a three-port bidirectional converter. For applica-tions with four ports or more, there are certainly many more possibilities to designa converter in this way.
To summarize, the general topology and the basic bidirectional switching cellsshow flexibility and several possibilities to construct a multiport bidirectional con-verter for applications with widely varying requirements for port voltage ranges,

6.4. Multiport system modeling [88] 159
magnetic-
coupling
Source
Load
Storage
+
+
+
Figure 6.10: Magnetically-coupled three-port converter with two current-fed ports(Topology F).
isolation, current ripple, and power throughput. Among the three-port convertertopologies presented above, some are naturally soft-switched, whereas others needextra control or auxiliary circuits to achieve soft-switching under certain operatingconditions (see the previous chapters).
6.4 Multiport system modeling [88]
So far, the basic topology has been described. A multiport converter integratesdiverse sources and should therefore be capable of managing power flow in thesystem. In order to design an adequate control system, knowledge of the small-signal model of the converter should be obtained first.
6.4.1 Small-signal modeling method
Extending the state-space description of conventional dc-dc converters, a generalmethod for modeling multiport dc-dc converters has been presented in [88]. Thismethod is summarized here. It has been shown that a matrix description, whichcan be extended to converters with any number of ports, is best suited to themodeling of a multiport system. In [88], a three-port forward-flyback converterwas analyzed as an example.
The small-signal modeling procedure of conventional switched-mode power con-verters is well established [89]. The flow chart for deriving the linearized small-signal model is depicted in Fig. 6.11 [67]. This method can also be applied tomultiport converters. First, the open-loop model of a multiport converter is devel-oped using an averaged description of the system. Then, the nonlinear equationsare linearized at the operating point found from the state-space equations. Fi-nally, this linearized model can be embedded within a feedback control loop to

160 Chapter 6. Family of multiport bidirectional converters
Switched linear equations
Continuous nonlinear equations
(Large-signal model)
Continuous linear equations
(Small-signal model)
State-space averaging
(Low-frequency approximation)
Linearization
(Small-signal approximation)
Figure 6.11: Modeling switch-mode power converters.
Multiport
dc-dc
converter
V1
i1+
_
V2
i2+
_
VN
iN+
_
VN-1
iN-1+
_
P1
P2
PN
PN-1
Figure 6.12: Generalized multiport dc-dc converter.
give a complete small-signal model, and the controllers can then be designed usingstandard control theory for linear systems.
6.4.2 Four essential vectors
In accordance with the sign convention adopted throughout the thesis, the refer-ence direction of current is into the positive terminal of each port, as shown inFig. 6.12. The converter is to be viewed as a “black box” having several powerports.
The presented system model is based on four essential vectors: the state vector,independent port vector, dependent port vector, and control vector [88]. Accordingto conventional control theory [90], the basis for a general description of a dynamicsystem may be stated as
dx
dt= Φ(x, t), (6.1)

6.4. Multiport system modeling [88] 161
where x is the vector of state variables. The dynamics of an nth-order convertercan be characterized by n internal state variables. For switching power converters,inductor currents and capacitor voltages are usually adopted as the state variables.These state variables constitute an instantaneous state vector, xinst(t). Usingeither an averaging or a sampling approach, the instantaneous state vector canbe reduced to a “moving average” equivalent low-frequency state vector x(t) bydisregarding “fast-changing” state variables [88].
The port voltages and currents of an N -port dc-dc converter comprise a set of2N port variables. We can classify the port variables into dependent and indepen-dent variables [88]. For instance, if a load port is designed to deliver a constantvoltage, then the port voltage is a dependent variable which is determined bythe converter. The current of the load port should be taken as the independentvariable. But for a voltage source port, the port voltage is an independent variable.
Either port voltage or current can be chosen as the dependent variable to forma dependent port vector y(t) (having N components) according to specific controlobjectives of a particular system. The remaining port variables then composean independent port vector w(t) (also having N components). In control systemterminology, the independent variables are disturbances to the system, while thedependent variables are the system’s response [88].
Suppose that the converter has M degrees of freedom in control (i.e., M controlvariables). The control signals form a control vector u(t) (having M components).According to the energy conservation law, in a lossless converter the sum of thepowers entering the converter is zero. Therefore, only N − 1 components of y(t)can be controlled by u(t) [88]. In order to fully control the system power flow, ithas to be satisfied that M ≥ N − 1.
6.4.3 State-space system representation
The state-space representation of a dynamic system is characterized by two equa-tions: one equation for determining the state of the system, and another equationfor determining its output (response), i.e.,
d
dtx(t) = Φ[x(t),u(t),w(t)], (6.2)
y(t) = Ψ[x(t),u(t),w(t)]. (6.3)
The above state-space equations describe the system’s large-signal dynamics. Fora switching power converter, the averaged model is nonlinear. In order to linearizethe system model, the steady-state operating point should be solved first. Thiscan be done by setting the control vector and independent port vector to constantvalues: u(t) = U and w(t) = W. The converter will settle to a steady-state wherex(t) = X. Because dX/dt = 0, by using (6.2) the steady-state operating point canbe solved: O = U,W,X,Y.
The next step is to linearize the system by adding small perturbations aroundthe operating point. The factors of the linearization can be derived by partial

162 Chapter 6. Family of multiport bidirectional converters
differentiation:d
dtx(t) = Ax(t) + Bu(t) + Ew(t),
y(t) = Cx(t) + Du(t) + Fw(t),(6.4)
where A, B, C, D, E, and F are constant matrices given by
A =∂Φ
∂x
∣∣∣∣O
, B =∂Φ
∂u
∣∣∣∣O
, E =∂Φ
∂w
∣∣∣∣O
,
C =∂Ψ
∂x
∣∣∣∣O
, D =∂Ψ
∂u
∣∣∣∣O
, F =∂Ψ
∂w
∣∣∣∣O
.
(6.5)
The eigenvalues of A govern the dynamics.The main control objective of a dc-dc power converter is to maintain the depen-
dent port vector y(t) (i.e., the system’s response) constant, despite variations inthe dependent port vector w(t) and other parameter deviations related to temper-ature drift and component aging. This goal can be reached by applying closed-loopfeedback control. Given the small-signal model, the controllers can be designedusing well-established linear systems control theory.
The key step in modeling a multiport converter is to find the averaged model ofthe converter. We have presented the averaged model of the three-port converterin Section 2.8.2 and Section 3.5.2, based on the power flow equations.
6.5 Control strategy for multiport systems
6.5.1 Power flow management
In a practical system, at each port power flow control can be implemented to reg-ulate the port voltage, current, or power according to the system’s specifications.In many cases a load port is voltage-controlled. For a source port, it usually makessense to regulate the port current. Direct power control of certain sources maybe more desirable. Although voltage-type energy sources like fuel cells and PVshave a variable operating voltage, to some extent power control can be regardedas an equivalent of current control if the change of the operating voltage of thesource is fairly slow compared with the control bandwidth. The dynamics of theport power is thus dominated by the port current. Therefore, the dynamics of thevoltage can reasonably be disregarded in the modeling. The power is equal to theport current times the voltage. In this respect, the voltage can equivalently bemodeled as a gain in the control loop, the variation of which influences the loopgain to some extent. We have modeled the three-port converter in Section 2.8.2in this way.
The object is to manage the power flow in the multiport system shown inFig. 6.3. Each dc bus can be viewed as a local energy exchange unit (i.e., asubsystem). Within a subsystem, the power at each port can be controlled byusing duty cycle as the control variable. For instance, suppose that the dc bushas a stiff voltage. Choosing an appropriate duty cycle for the switching cell

6.5. Control strategy for multiport systems 163
determines the port’s power flow (either sinking or sourcing). This can be easilyunderstood when current-mode control is adopted, where the duty cycle of thebuck/boost bidirectional switching cell is controlled such that the source current(or power) follows a commanded value. One port, most likely the storage port,should be devoted to the regulation of the dc bus voltage. Secondly, between thedc buses power flow can be controlled by proper phase shifts of the high-frequencyvoltages presented to the transformer windings. Power is exchanged through thetransformer with the inductors acting as the energy transfer elements.
The total power generated in the system must be equal to the total power con-sumed. In other words, the total power sourced should be equal to the power sunkby the ports. As stated, an N–port system has a maximum of N − 1 independentdegrees of freedom in control. Therefore, at least one port, most commonly beinga storage port, should not be directly regulated in voltage, current, or power. Itbalances the power flow between the generators and loads automatically, i.e.,
PStorage = −(∑
PGenerator +∑
PLoad
). (6.6)
This is a self-adjusting system. For instance, in the three-port fuel cell systempresented in the preceding chapters, the storage matches the load variations whilethe power of the fuel cell is kept nearly constant.
In brief, the energy flow of all the ports except one storage port can be con-trolled directly either by phase shift or by duty cycle. By means of the magnetic-coupling, power flow is controlled by phase shift, whereas by means of the dc-link,power flow can be regulated by duty cycle. To distribute the instantaneous poweramong the generators, loads, and storage elements, the system controller needsto set appropriate reference values. As particular cases, the power flow manage-ment in the three-port converters (Topology B and Topology C) was presented inSection 2.5 and Section 4.4, respectively.
6.5.2 Conceptual system control strategy
Although the converter topology is complex, the regulation of outputs and manage-ment of source powers can still be carried out by a powerful controller. However,for a multiport system the control design is challenging.
The control structure of a multiport converter shows a typical MIMO plant,where the control objectives can be a port’s voltage, current (e.g., fuel cell current),or power (e.g., maximum power point tracking of a PV system). These quantitiesare aggregated into the dependent port vector y(t). The available system controlvariables for the proposed topologies are phase shifts and/or duty cycles.
Fig. 6.13 illustrates the conceptual control strategy. It is supposed that in theN -port converter Nm power ports are incorporated into the system by magnetic-coupling, whereas Nd power ports are through dc-link. Hence, there are Nm +Nd − 1 independent control variables in total (Nm − 1 phase shifts and Nd dutycycles). These are the elementary of the control vector u(t). Each control variableis produced by a dedicated controller or by a computing unit. Note that if asource is integrated into the system through direct coupling to a dc bus instead

164 Chapter 6. Family of multiport bidirectional converters
Controller++++
−−−−
Phase-shift
and/or
PWM
modulator
PHS1A
PHS1B
D1
D2
DNd
Power
stage
PHS2A
PHS2B
PHSNmA
PHSNmB
PWM1A
PWM1B
PWM2A
PWM2B
PWMNdA
Feedback
measurement
and
sampling
circuits
Ref1
++++
−−−−
Ref2
++++
−−−−
++++
−−−−
++++
−−−−
++++
−−−−
Ref1
Ref2
RefNm-1
RefNm
Power
flow
manager
12ϕ
13ϕ
1Nmϕ
Controller
Controller
Controller
Controller
Controller PWMNdB
RefNm+1
RefN-1
RefN-1
RefNm-1
RefNm
RefNm+1
Figure 6.13: Conceptual control strategy for multiport bidirectional converters.
of through a buck/boost switching cell (for example, the storage in Topology Dshown in Fig. 6.8), one degree of control freedom is lost. In this case, one moredegree of freedom should be found in order to manage the power flow in thesystem. For instance, in Topology D the duty cycle of the boost half-bridge canbe utilized as the second control variable (usually it is fixed at 50%), as discussedin Section 4.6.2.
As shown in Fig. 6.13, the feedback measurement and sampling circuits senseall necessary real-time circuit operating parameters such as port voltages and cur-rents, and calculate objective variables that are difficult to measure directly, forexample, the power. The outputs of the sampling circuits are then compared withreference signals generated by a power flow manager. The power flow manager, be-ing the system’s decision-maker, is responsible for generating the references accord-ing to specific operating conditions. It is also in charge of the SOC of the storageelements. For instance, when the storage devices are fully-charged/-discharged, aproper reference set should be issued by the power flow manager in accordancewith the operating conditions. Phase shift and/or PWM modulators are used togenerate phase-shifted (PHS) and PWM control signals. PHS and PWM signalscontrol the magnetically coupled switching cells and the dc-linked switching cells,respectively. In addition to this basic control strategy, further functionality canalso be realized, for instance, using certain control methods to extend the soft-switching range (e.g., duty ratio control as presented in Section 3.3). It is possibleto perform the control and power management of such a complex system by, forexample, a digital processor in combination with a FPGA device.
With the said control strategy, the control of all duty cycles is essentially de-coupled from each other. They are independent and have no interaction effects.However, the phase shift compensations do influence each other. We have ad-dressed the cross-coupling in Section 3.5.3 for the three-port system. Either adecoupling network, or judicious choice of loop bandwidths, is necessary to avoidundesirable oscillations in the system.

6.6. Experimental verifications and discussions 165
6.6 Experimental verifications and discussions
6.6.1 Verifications of the three-port topologies
The performances of the three-port converters derived from the general topologyhave been reported as special cases in the previous chapters. In Section 3.7.2 theTAB converter was verified on an experimental prototype at 20 kHz switchingfrequency. A control approach was introduced to extend the soft-switching re-gion. The measurement results of steady-state operation and closed-loop powerflow control were presented. Furthermore, a higher power prototype at 100 kHzswitching frequency was constructed and tested. The measurement results are tobe presented in Section 8.10.
In Section 4.5.2, the two-input converter (Topology C, as shown in Fig. 6.7)was tested in a 500 W experimental setup. Good results of power flow manage-ment were obtained, confirming the theoretical analysis. The converter of Fig. 6.9(Topology E) has also been verified on a prototype as reported in Section 5.4.2,where not only low current ripple is achieved, but also the soft-switching region isextended by using asymmetrical wave control.
For applications of more than three ports, for example, if a further PV source,a second fuel cell, load, or storage element is incorporated into the system, theconverter will be a four-port structure. With a single DSP, the control of a four-port converter is still manageable. The power density of the whole system mayalso be improved because it is a centralized conversion system. Power devices canbe tightly packaged by using integrated power modules, as mentioned before.
A good application case of a four-port system is a fuel cell powered electricvehicle with battery and supercapacitor hybrid storage. The battery provideslong-term energy storage, whereas the supercapacitor offers short-term transientenergy buffering. The peak power needed during acceleration and energy gener-ated by regenerative braking can be supplied/absorbed by the supercapacitor. Assuch, the system power flow is optimized, improving the system’s performance andprolonging the devices’ lifetime.
6.6.2 Discussion on multiport converters
The topology study in this chapter shows the flexibility of the proposed structureand deduces converter topologies from it for specific applications. It is not in-tended to detail the operation modes and control schemes for all of the proposedtopologies. One can refer to the previous chapters for a better understanding of aspecific structure.
The topologies presented here fit into different applications. When choosinga suitable topology for a particular application, source voltage, isolation require-ments, current ripple specifications, and power throughput are to be considered.We have mentioned the advantages and disadvantages of the topologies describedin this chapter but only compare them briefly.
As the system has a multiport structure, the relationship between ports andthe effect caused by an individual port are of concern. For instance, the storage

166 Chapter 6. Family of multiport bidirectional converters
matches the load variations while keeping the power of the primary source near-constant, dynamically decoupling the source from the load. The previous chapters(e.g., Section 2.5, 3.4, and 4.4) can be referred to for more information.
The three-port topologies are the simplest. In this work, we focus on three-portenergy management systems and the effectiveness of this approach was verified byexperiments. Based on the proposed concept, one can extrapolate the approachtoward more complex structures for specific multiport applications.
The treatment of modeling and control of general multiport converters is keptvery conceptual. This topic deserves further investigation. Mainly, we have at-tempted to describe a family of multiport bidirectional converters based on three-port systems, leaving the implementation of a more complex structure to futurework.
6.7 Topologies for high-power applications
Now let us return to the point we made in Section 6.3.2. Using interleaved topolo-gies, the proposed basic bidirectional switching cells can be used for high-powerapplications (greater than 10 kW, for example).
6.7.1 Polyphase interleaved structure
The polyphase interleaving technique has been widely used in high-power dc-dcconverters. A polyphase structure with interleaved control enables high-powerboost/buck converters to reduce the ripple current and the size of the passivecomponents. Through interleaving, the effective converter operating frequency isthe device switching frequency times the number of interleaved phases. More-over, interleaving allows magnetic components to be integrated by using coupledinductors. For high-power applications, the interleaved technique combined withcoupled inductors can reduce the size and weight of the inductor and at the sametime reduce the losses in the coupling leg [16]. It is also possible for each switch-ing leg to operate in discontinuous conducting mode (DCM), while the combinedinput current is still continuous.
Bidirectional switching cells in Fig. 6.4 can be implemented using interleaving,as shown in Fig. 6.14. The buck/boost bidirectional switching cell in Fig. 6.4(a) canbe implemented using, for example, the three-phase structure shown in Fig. 6.14(a).As such, the power rating of the port is increased and the current ripple is reduced.
In the same way, the full-bridge shown in Fig. 6.4(c) can be replaced with athree-phase bridge in Fig. 6.14(b). This is in essence an interleaved version of thesingle-phase bridge. Just by adding one more phase leg, the effective frequency ofthe ripple current is tripled and its amplitude is reduced substantially.
The topology depicted in Fig. 6.14(c) is an interleaved three-phase boost bridge(an extension of the boost full-bridge (Cell E) in Fig. 6.4(e)). The shift betweenthe phases is 120o. The frequency of the ripple current in the dc capacitor is threetimes the device switching frequency. Because of the canceling effect of the threeinterleaved phases, the ripple current is significantly reduced [16].

6.7. Topologies for high-power applications 167
+
+
+
(a) Three-phase buck/boost (Cell F) (b) Three-phase bridge (Cell G)
(c) Three-phase boost bridge (Cell H)
Figure 6.14: Three-phase interleaved bidirectional switching cells.
+
+
Storage Load
+
Source
Figure 6.15: High-power three-port three-phase converter using interleaving.
6.7.2 High-power three-port converter topologies
Aiming at high-power applications, we have presented in Section 2.9 a three-portthree-phase converter topology that comprises three high-frequency three-phasebridges operating in a six-step mode connected to a three-port symmetrical trans-former. The circuit is an extension of the single-phase TAB topology.
A second possible high-power three-port three-phase converter topology is sug-gested in Fig. 6.15 and is an extension of the topology presented in Section 4.2(see also Topology C in Fig. 6.7). The operating principle is similar. This topol-ogy is useful for high-power applications because of its low current ripple. Thethree-phase concept has also been recognized in [91] when a topology similar tothe one in Fig. 6.15 was studied.
The topologies presented in this chapter belong to a family of multiport bidi-rectional converter with attractive features for both low- and high-power applica-tions. The proposed schemes combine traditional dc-link coupling and magnetic-coupling.

168 Chapter 6. Family of multiport bidirectional converters
vN-1
v2
vN
N1 N2
NN-1 NNVN-1
LN-1
v1V1
L1 L2
LN
VN
V2
or
MOSFET IGBT
Figure 6.16: Transformer-coupled multi-active-bridge (MAB) converter topology.
6.8 Power flow in multi-active-bridge topology
We have extended the three-port structure to an N -port structure. With a dc-link, the port power control is relatively easy to understand: to control the dutycycle of the switching cell such that the port power, current, or voltage follows areference. The regulation of the duty cycle is independent of other controls. Withmagnetic-coupling, however, it is not obvious how to control the power flow inthe multiwinding transformer. This section analyzes the power flow in a multi-active-bridge (MAB) converter (only magnetic-coupling, no dc-link) as shown inFig. 6.16. In spite of the complex structure, in such a converter the power flowcan still be controlled by phase-shifting the bridges. In theory, arbitrary powerflow in the system can be realized by a unique set of phase shifts.
In Section 2.4, it has been shown that a ∆-model transformer representationfacilitates the system analysis. This approach can be further applied to the MABconverter. A more appropriate term to describe the transformer model is thecantilever model [92]. By using the cantilever model of the multiwinding trans-former, an N -port system is decomposed into N(N − 1)/2 two-port models. Ageneral description of MAB converters and the analysis of the system power floware presented in the following sections.
6.8.1 MAB topology and power flow modeling
An MAB converter couples several power ports using a multiwinding transformer[93]. The advantage of this magnetic-coupling method is that power ports havingdifferent operating voltages are galvanically isolated and can be easily matched bytransformer turns ratios.

6.8. Power flow in multi-active-bridge topology 169
(a)
L1
v1
L4
v4 v3
L2
L3
v2
L12
L34
L23L14
1 : n2
v2
i2
L13
L24
1 : n3
v3
i3n4 : 1
v4
i4
Lm
v1
i1
(b)
LM
Figure 6.17: Model of the four-port MAB converter, showing (a) the original model,(b) the cantilever model representation of the system.
MAB converter topology
As a case study, a four-port MAB converter is illustrated in Fig. 6.17 with theactual transformer represented by its cantilever model. Using the cantilever modelto represent a multiwinding transformer has the advantage that the parametersare directly measurable [92]. The model can easily be extended to a general N -port configuration. In general, N(N + 1)/2 independent parameters are requiredto model a transformer containing N windings. In Fig. 6.17(b), those parametersconsist of seven inductors and three turns ratios. The inductors in Fig. 6.17(a)represent the sum of the transformer leakage and external inductances.
Similar to the TAB converter in Section 2.3, the MAB circuit can be viewed asa network of inductors driven by high-frequency voltages generated by the bridgesconnected to the windings. All the voltages have the same frequency and theyare shifted with respect to each other. The simplest case is that each bridgegenerates a square-wave voltage. The power flow in the system is controlled bythe phase shifts. In the original transformer model, the power flow equation israther complicated because there is no direct power flow link between any twoof the ports. By transforming to the equivalent cantilever model, the power flowthrough each inductor is simplified to a two-port system. The power flow at eachport is simply a summation of the power flows through the inductors associatedwith that port.
Power flow in MAB converters
In this section, the four-port MAB converter (Fig. 6.18) is analyzed. All theparameters are referred to the primary and the magnetizing inductance is neglectedbecause it has no influence on the power flow. The voltages are phase shifted fromeach other by controlled angles. For convenience, v1 is set as the reference. Theother voltages have their phase shift angles defined with respect to v1. For adesired power flow at each port, the following presents a method for calculatingthe required phase shifts.
Let Pi denotes the power flow at each port. The power flow between two ports

170 Chapter 6. Family of multiport bidirectional converters
(a)
v1
v2
ϕ13
v3
Reference
ϕ12
ϕ14
v4
(b)
v3v4
P12
P34
P14 P23
P4
L12
L34
L23L14
L13
L24
P13
P24
P3
v2P2v1P1
'
'
'' '
'
Figure 6.18: Four-port MAB converter, showing (a) the primary-referred cantilevermodel, (b) voltages applied to the transformer (square-wave operationmode).
is denoted by Pij , which represents the power flowing from Vi to Vj . A negativesign means power flow in reverse direction. By writing the power flows in matrixformat
P =
⎡⎢⎢⎣
P1
P2
P3
P4
⎤⎥⎥⎦ , H =
⎡⎢⎢⎣
1 1 1 0 0 0−1 0 0 1 1 00 −1 0 −1 0 10 0 −1 0 −1 −1
⎤⎥⎥⎦ ,
Q =[P12, P13, P14, P23, P24, P34
]T,
(6.7)
the power flow at each port is given by
P = HQ, (6.8)
with4∑
i=1
Pi = 0 (regardless of losses). This complies with the energy conservation
law. Therefore, the rank of the matrix H is degraded by one, i.e.,
rank H = N − 1, (6.9)
where N is the number of ports, in this example N = 4. The system is thenrewritten by choosing any three rows. For example, leaving out the last row gives
P′ =
⎡⎣ P1
P2
P3
⎤⎦ , H′ =
⎡⎣ 1 1 1 0 0 0−1 0 0 1 1 00 −1 0 −1 0 1
⎤⎦ . (6.10)
The power flow in the system can then be described by
P′
= H′
Q. (6.11)
The power flow through each inductor is a function of the phase shift, i.e.,
Pij = f(ϕij), (6.12)

6.8. Power flow in multi-active-bridge topology 171
where ϕij denotes the phase shift between vi and vj . Detailed power flow equationsfor different operation modes are presented in the following section.
Substituting (6.12) into (6.11) yields
⎡⎣ P ∗
1
P ∗2
P ∗3
⎤⎦ =
⎡⎣ 1 1 1 0 0 0−1 0 0 1 1 00 −1 0 −1 0 1
⎤⎦⎡⎢⎢⎢⎢⎢⎢⎣
f(ϕ12)f(ϕ13)f(ϕ14)f(ϕ23)f(ϕ24)f(ϕ34)
⎤⎥⎥⎥⎥⎥⎥⎦
, (6.13)
where P ∗i is the desired power at the ports. Together with⎧⎪⎨
⎪⎩ϕ14 = ϕ12 + ϕ23 + ϕ34
ϕ13 = ϕ12 + ϕ23
ϕ24 = ϕ23 + ϕ34
(6.14)
the phase shifts can be calculated for an arbitrary power flow profile (six variables,six equations, in (6.13) and (6.14)).
Therefore, once a desired system power flow profile is known, a unique set ofphase shifts can be computed correspondingly. On the other hand, if the phaseshifts are given, the power flow at each port can be calculated straightforwardly.
A converter with more ports can be analyzed in the same way. In most applica-tions, the phase shift is determined by feedback control, the same as in pulse-widthmodulated power converters. The preceding discussion is only meant to show thatit is possible to find a set of phase shift commands that realize a defined systempower flow. A number of system requirements can be met by choosing an appro-priate power flow profile. For example, some power sources ought to be operatedat the maximum power point (e.g., photovoltaics), while others should be kept ata constant voltage (e.g., load). By using feedback controllers possibly in combi-nation with the above phase shift calculations, it is possible to control the powerflow in the MAB converter.
6.8.2 Power flow analysis for three operation modes
The previous section showed that a MAB converter can always be decomposedin several two-port subsystems. It is therefore sufficient to investigate the powerflow in a two-port system. The possible operation modes of the two-port modelare illustrated in Fig. 6.19. In this section, the power flow equations for differentoperation modes are presented. For a detailed derivation of the equations, seeAppendix C.
Mode I: two square-waves
This is the simplest operation mode and suitable for applications where the volt-ages at both ports are kept constant during the operation. Provided this condition

172 Chapter 6. Family of multiport bidirectional converters
π
π
ϕ
v1
v2
(a) Mode I
V1
V2
ϕ
v1
πD2
πD1V1
V2
(c) Mode III
v2
L
v1i1 '
'
v2'
'
'
tω
tω
tω
tωπD2
πv1
ϕ
V1
V2
(b) Mode II
v2'
'
tω
tω
Figure 6.19: Three different operation modes: (a) Mode I: two square-waves, (b)Mode II: square-wave and rectangular-pulse-wave, and (c) Mode III: tworectangular-pulse-waves.
is held, the ZVS condition is achievable over the whole operation region (see Sec-tion 3.2.1).
As already known from Section 2.2, with two square-waves the power flow overthe entire phase shift region (−π/2 ≤ ϕ ≤ +π/2) can be calculated by
P =V1V2
nωLϕ
(1 − |ϕ|
π
). (6.15)
The power flow versus the phase shift over the whole operating range is plotted inFig. 6.20(a) at different dc conversion ratios d, where d is defined (in Section 2.2)as
d =V2
nV1. (6.16)
For simplification, all quantities are normalized to the following base set and theunits in the figures are p.u.:
VB = V1, IB =VB
ωL, and PB =
V 2B
ωL, (6.17)
where VB , IB, and PB are the bases of voltage, current, and power, respectively.Fig. 6.20(b) plots the peak current Ipeak and rms current Irms through the induc-tor, and the average port current Iavg in the two-port system when transferring0.2 p.u. of power. As shown in the figure, Iavg stays the same (0.2 p.u.). It is shownthat Ipeak is minimal when the primary-referred voltages are equal in amplitude(d = 1) and Irms is also minimal in the vicinity of d = 1.
Mode II: square-wave and rectangular-pulse-wave
This operation mode is for applications where one port has a dynamically changingoperating voltage while the other has a constant voltage. It is assumed that v1

6.8. Power flow in multi-active-bridge topology 173
0.5 1 1.5 20
0.5
1
1.5
2
0.5 0.25 0 0.25 0.52
1
0
1
2
d = 2.0
d = 1.0
d = 0.5
Mode IMode I
Ipeak
Iavg
IrmsPow
er (
p.u
.)
Cu
rren
t (p
.u.)
Dc conversion ratio d(a) (b)
Figure 6.20: Operation mode I, showing (a) power flow versus phase shift, and (b) thepeak (Ipeak) and rms (Irms) current through the transformer and averagesource current (Iavg) versus the dc conversion ratio d when transferringthe same amount of power (0.2 p.u.) in the two-port system.
is a square-wave and v2 is a rectangular-pulse-wave with a controlled duty ratioD2 (i.e., V2 varies dynamically in a wide range). In order to achieve ZVS overthe entire phase shift region, as proposed in Section 3.2, the duty ratio should becontrolled as
D2 =V2min
V2, (6.18)
where V2min is the minimum operating voltage of V2. With this control method, ahigher voltage leads to a smaller duty ratio. The transformer turns ratio is chosenas
n =V2min
V1. (6.19)
Using the voltage base VB , V1 and V2 can be expressed as
V1 = VB and V2 =nVB
D2. (6.20)
In the same way, the power flow equation for Mode II can be obtained aftersome manipulations. However, in this case the phase-shift operating range hasto be divided into two regions referred to as the inner mode and outer mode(explained in Section 3.2). The boundary between the two regions is given by
ϕB =π
2(1 − D2) . (6.21)
If |ϕ| ϕB (inner mode), the power flow is given by
P =V 2
B
ωLϕ, (6.22)

174 Chapter 6. Family of multiport bidirectional converters
0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
k
0.5 0.25 0 0.25 0.51.5
1
0.5
0
0.5
1
1.5
(p)
D2 = 0.75
D2 = 1.0
D2 = 0.5Mode IIMode II
(a) (b)
Ipeak
Iavg
Irms
Pow
er (
p.u
.)
Curr
ent
(p.u
.)
Duty ratio D2
Figure 6.21: Operation mode II, showing (a) power flow versus phase shift, and (b) thepeak (Ipeak) and rms (Irms) current through the transformer and averagesource current (Iavg) versus the duty ratio D2 when transferring the sameamount of power (0.2 p.u.) in the two-port system.
and if ϕB < |ϕ| π/2 (outer mode),
P =V 2
B
D2ωL
(ϕ
(1 − |ϕ|
π
)− sign(ϕ)
π
4(1 − D2)
2
), (6.23)
where sign() is a function which returns the sign of the phase shift. Fig. 6.21(a)plots the power flow versus the phase shift at different duty ratios. In Fig. 6.21(b),it is shown that for transmitting an equal amount of power the peak current Ipeak
is minimal when D2 = 1. The average port current Iavg is 0.2 p.u. in all cases.The rms current Irms is also minimal in the vicinity of D2 = 1, however, notexactly at D2 = 1. This is due to the fact that a larger phase shift results in ahigher reactive current (see Section 2.7.1). For transferring the same amount ofpower, the operating phase shift increases when the duty ratio D2 increases, ascan be inferred from Fig. 6.21(a). Therefore, the reactive power in the systemincreases. Nevertheless, the square-wave mode (D2 = 1) is the optimal operatingcondition because the operating phase shift can be designed with the inductance (alower inductance leads to a smaller operating phase shift and thus a lower reactivecurrent for transferring the same amount of power).
Mode III: two rectangular-pulse-waves
A corresponding analysis is carried out for Mode III. This operating mode shouldbe adopted for applications where both ports have a wide operating voltage range.Again, in order to guarantee ZVS, the duty ratios of the voltages are controlled inaccordance with
D1 =V1min
V1and D2 =
V2min
V2, (6.24)
where V1min and V2min are the minimum operating voltages of V1 and V2, re-spectively. Clearly, when the voltage increases, the corresponding duty ratio is

6.8. Power flow in multi-active-bridge topology 175
reduced in order to keep the half-cycle volt-seconds across the transformer wind-ings unchanged. The transformer turns ratio is chosen according to the minimumoperating voltages as
n =V2min
V1min
. (6.25)
The voltage base is defined as
VB = V1min =V2min
n. (6.26)
Since both voltages are duty-ratio-controlled, then
V1 =VB
D1and V2 =
nVB
D2. (6.27)
The power flow equation can be derived analytically. The phase shift bound-aries are given by
ϕB1 =π
2|D1 − D2| ,
ϕB2 =π
2(2 − D1 − D2) .
(6.28)
If |ϕ| ϕB1, the power flow can be expressed as
P =V 2
B
ωL· ϕ
max(D1, D2). (6.29)
If ϕB1 < |ϕ| ϕB2,
P =V 2
B
2ωLD1
⎛⎜⎝
sign(ϕ)π
2(D1 − D2) + ϕ+
1
D2
(sign(ϕ)
(−π
4
) (D2
1 − D22
)+ D1ϕ − sign(ϕ)
ϕ2
π
)⎞⎟⎠ . (6.30)
If ϕB2 < |ϕ| π/2,
P =V 2
B
ωLD1D2
(ϕ
(1 − |ϕ|
π
)− sign(ϕ)
π
4(1 − D1)
2 − sign(ϕ)π
4(1 − D2)
2
).
(6.31)
Fig. 6.22(a) plots the power flow at different duty ratios by using these equa-tions. Fig. 6.22(b) shows the peak, rms, and average current as a function of theduty ratio when the power flow between the two ports is kept unchanged. Toillustrate this, assume that D2 is equal to 0.8 and is kept constant. As can beseen, the peak current Ipeak and rms current Irms are minimal when D1 is also0.8 (i.e., D1 is equal to D2). It is observed that the average port current Iavg riseswhen the duty ratio increases (i.e., the port voltage decreases). This is because alower dc port voltage needs a higher dc current to have the same power.

176 Chapter 6. Family of multiport bidirectional converters
0.5 0.25 0 0.25 0.52
1
0
1
2
0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
Mode IIIMode III
(a) (b)
Ipeak
Iavg
Irms
D1 = 0.5
D2 = 0.5
D1 = 0.8
D2 = 0.5
D1 = 0.8
D2 = 0.8
Pow
er (
p.u
.)
Curr
ent
(p.u
.)
Duty ratio D1
D2 = 0.8
Figure 6.22: Operation mode III, showing (a) power flow versus phase shift, and (b) thepeak (Ipeak) and rms (Irms) current through the transformer and averagesource current (Iavg) versus the duty ratio D1 (D2=0.8) when transferringthe same amount of power (0.2 p.u.) in the two-port system.
6.8.3 First harmonic analysis
As discussed in Section 2.8.3, the high-frequency voltages presented at the trans-former windings can be replaced by their fundamental components2. The model isidentical to a synchronous machine equivalent circuit, or to the parallel operationmodel of grid-frequency inverters.
First harmonic analysis of Mode I
First, consider Mode I (square-wave at both sides). The peak values of the fun-damental components, Vf1 and Vf2, of the voltages presented to the windings, v1
and v2, are given as (assuming a full-bridge)
Vf1 =4
πV1 =
4
πVB and Vf2 =
4
πV2 =
4nd
πVB, (6.32)
where d is the dc conversion ratio defined in (2.1) on page 33. As already shownin Section 2.8.3, the power flow caused by the first harmonic is given by
P =Vf1Vf2
2nωLsin ϕ =
8dV 2B
π2ωLsin ϕ. (6.33)
Fig. 6.23(a) plots the power flows calculated by the full and the first harmonicmodel. It is shown that the first harmonic model has less than 20% error over theentire phase shift range. In Fig. 6.23(b), it is observed that the relative error islargely constant for different voltage ratios d. The relative error is calculated by
ErrR =PFund − PFull
PFull
× 100%, (6.34)
2The first harmonic model is only for estimating the power flow, not for estimating the peakcurrents.

6.8. Power flow in multi-active-bridge topology 177
0.5 0.25 0 0.25 0.520
15
10
5
0
5
Rel
ativ
e E
rro
r (%
)
0.5 0.25 0 0.25 0.52
1
0
1
2
Actual
Fundamental
d = 2.0
d = 1.0
d = 0.5
Mode IMode I
(b)
d = 0.5
d = 1.0
d = 2.0
Full Model1st Harmonic Model
Rel
ativ
e er
ror
Err
R(%
)
Pow
er (
p.u
.)
(a)
Figure 6.23: Comparison of (a) the power flow calculated with the full model and thefirst harmonic model for Mode I, and (b) the relative errors.
where PFund and PFull are the powers calculated with the first harmonic and thefull model, respectively. The relative error becomes maximum when the phaseshift is close to zero.
First harmonic analysis of Mode II
Suppose that duty ratio control is applied at the V2 side. Then, the peak valuesof the fundamental components of the high-frequency voltages are
Vf1 =4
πVB and Vf2 =
4n
πD2VB cos
((1 − D2) π
2
), (6.35)
where D2 represents the duty ratio of v2. The power flow caused by the firstharmonic is therefore given by
P =8V 2
B
π2D2ωLcos
((1 − D2) π
2
)sin ϕ. (6.36)
This power flow equation is simpler than the one for the full model. There is noneed to divide the phase-shift region into inner mode and outer modes. To verifythe accuracy of the model, Fig. 6.24(a) compares the calculated power flows. InFig. 6.24(b), it can be seen that the relative error curves are quite different fromeach other when the duty ratio D2 varies. In general, the relative error reduces asthe phase shift increases. For a certain phase shift, around 0.3π, the relative erroris zero.

178 Chapter 6. Family of multiport bidirectional converters
0.5 0.25 0 0.25 0.51.5
1
0.5
0
0.5
1
1.5
Actual
Fundamental
(p)
0.5 0.25 0 0.25 0.520
10
0
10
20
Rel
ativ
e E
rro
r (%
)
Mode IIMode II
(b)
D2 = 1.0
D2 = 0.75
D2 = 0.5
D2 = 0.75
D2 = 1.0
D2 = 0.5
Full Model1st Harmonic Model
Rel
ativ
e er
ror
Err
R(%
)
Pow
er (
p.u
.)
(a)
Figure 6.24: Comparison of (a) the power flow calculated with the full model and thefirst harmonic model for Mode II, and (b) the relative errors.
First harmonic analysis of Mode III
In Mode III, the peak values of the fundamental components of the voltages canbe calculated as
Vf1 =4
πD1VB cos
((1 − D1) π
2
)and Vf2 =
4n
πD2VB cos
((1 − D2) π
2
).
(6.37)The power flow caused by the first harmonic is then given by
P =8V 2
B
π2D1D2ωLcos
((1 − D1) π
2
)cos
((1 − D2) π
2
)sin ϕ. (6.38)
It is obvious that the power flow equation is greatly simplified by the firstharmonic approach, as we get only one equation for the entire phase shift region.The introduction of duty ratio control adds nothing more than an extra coefficientrelated to duty ratio. In this operation mode, the accuracy of the first harmonicmodel is still satisfying. Fig. 6.25(a) compares the power flow curves using the fulland the first harmonic model for some selected cases. The relative error curvesdiffer when the duty ratios vary, as shown in Fig. 6.25(b). Generally speaking, theerror stays below 10% in most of the phase shift region.
In summary, the first harmonic approach is a simple way to estimate the powerflow for all the mentioned operation modes. In most cases the relative error staysbelow 10%. The largest relative error occurs when the phase shift is very small(i.e., at light load), being around 18%. The first harmonic model also simplifiesthe system small-signal modeling. By linearizing at the operating point, the gainof the system can be easily obtained with the above equations. In Section 2.8.3and 3.5, we have used the first harmonic model to calculate the small-signal gainof the DAB and TAB converters.

6.9. Conclusions 179
0.5 0.25 0 0.25 0.520
10
0
10
Rel
ativ
e E
rro
r (%
)
0.5 0.25 0 0.25 0.52
1
0
1
2
Actual
Fundamental
Mode IIIMode III
(b)
D1 = 0.5
D2 = 0.5
D1 = 0.8
D2 = 0.5
D1 = 0.8
D2 = 0.8
D1 = 0.5
D2 = 0.5
D1 = 0.8
D2 = 0.5
D1 = 0.8
D2 = 0.8
Full Model1st Harmonic Model
Rel
ativ
e er
ror
Err
R(%
)
Pow
er (
p.u
.)
(a)
Figure 6.25: Comparison of (a) the power flow calculated with the full model and thefirst harmonic model for Mode III, and (b) the relative errors.
6.9 Conclusions
Attempts have been made in this chapter to explore flexible converter structures formultisource generation systems. A multiport system structure has been proposed.Compared with the conventional structure using multiple converters, a multiportconverter promises integrated power conversion by utilizing only a single powerprocessing stage. The main issues covered are a description of the general topologyand basic bidirectional switching cells, construction of various topologies, andconceptual converter modeling and control design.
Resulting from an extensive topology study, a family of multiport bidirectionaldc-dc converters has been presented, based on a general topology that combinesa dc-link with magnetic-coupling. The presented converter concept provides amethod to integrate power sources with widely differing characteristics.
Furthermore, based on the interleaving technology, solutions for high-powerapplications were provided. The proposed basic bidirectional switching cells havebeen extended to polyphase interleaved versions.
The idea of using active-bridges coupled by a multiwinding transformer hasbeen extended into a MAB topology. An analysis of the power flow in theseMAB converters was presented. By transforming the multiwinding transformer toan equivalent cantilever model, the system analysis is significantly simplified. Amethod for power flow calculation using matrix notation was proposed. Moreover,three operation modes were analyzed in terms of current stress and rms loss, andthe power flow equations were derived. A first harmonic approach to simplify thecalculation of power flow was proposed. The full model and the first harmonicmodel were compared for three different operation modes. The first harmonicmodel shows satisfying accuracy in most cases.

180 Chapter 6. Family of multiport bidirectional converters

Part II
Utility interconnection andsystem control
181


Chapter 7
Inverter control and gridinterfacing
1The second part of the work concerns control of line-interactive PWM invertersand grid interfacing of small distributed generation (DG) systems. DG systemsprovide standby service during utility outages and, when operated during peak loadhours, potentially reduce energy costs. The connection of a generation system tothe utility grid requires a robust phase locked loop (PLL) and continuous detectionof the utility grid status.
This chapter details a flexible control strategy to operate a small/micro single-phase DG system in both stand-alone and grid-connected modes. In particular,a high-performance PLL for single-phase inverters is proposed. The PLL uses atransport delay method to generate a virtual quadrature signal, thereby emulatinga balanced three-phase system. Furthermore, an orthogonal filter is incorporatedto improve the PLL performance when the grid voltage is distorted. To achieve zerosteady-state error and to implement selective harmonic compensation, resonantcontrollers are proposed for both the voltage regulation in stand-alone controlmode and the current regulation in grid-connected control mode.
7.1 Introduction
Most sustainable energy sources supply energy in the form of electrical power. DGsystems are often connected to the utility grid through power electronic converters.A grid-connected inverter provides the necessary interface of the DG system to thephase, frequency and amplitude of the grid voltage, and disconnects the systemfrom the grid when islanding. Such a DG system can be designed to operate in
1This chapter is based on the following paper:
H. Tao, J. L. Duarte, and M. A. M. Hendrix, “Control of grid-connected inverters as usedin small distributed generators,” in Proc. IEEE Industry Application Society Conference andAnnual Meeting (IAS’07), New Orleans, USA, Sep. 2007, pp. 1574–1581.
183

184 Chapter 7. Inverter control and grid interfacing
both stand-alone and grid-connected modes [94], [95]. When the utility grid isnot available or the utility power is accidentally lost, the DG system is used as anon-site power or standby emergency power service, effectively being an extendeduninterruptible power supply (UPS) that is capable of providing long-term energysupply.
An experimental system (to be detailed in Chapter 8) is shown in Fig. 7.1,where Lf and Cf form the inverter output filter, Zl is the grid impedance, theSTS (static transfer switch) is a triac for connecting the DG system to the grid,and POC stands for the point of connection. A fuel cell is used as the primarysource and a supercapacitor is used as the storage. The power conditioning unitof the system consists of a grid-interfacing inverter and a three-port bidirectionaldc-dc converter. The system operates in line-interactive mode. Furthermore, theinverter is simultaneously operated as a shunt active filter and compensates forthe reactive and harmonic current demanded by local loads (to be elaborated inChapter 8). The initial implementation of the system is at a power level typicalfor home applications (maximum 3.5 kW). Therefore, a single-phase version isconsidered throughout the chapter. With a few modifications, it is possible toextend the system to a higher power level using a three-phase configuration.
The main topics of this chapter are the control of the PWM inverter and thegrid interfacing of the system. It is shown that by using resonant controllers [96]for both the current regulation in grid-connected control mode and the voltageregulation in stand-alone control mode, zero steady-state error and fast transientresponse can be achieved. Resonant controllers are also used to implement selec-tive harmonic compensation [97]. For connecting the DG system to the grid, ahigh-performance PLL structure for single-phase systems is presented. The PLLstructure is implemented with a transport delay and an orthogonal filter. Thetransport delay is used to generate a virtual quadrature signal [98] and the or-thogonal filter [99], which has been proposed for three-phase systems [100] (alsoreferred as multivariable filter), is used for improving the PLL performance whenthe grid voltage is distorted. The operation of the system requires a real-timedetection of the grid status (such as outage, over-/under-voltage and over-/under-frequency). An automatic and smooth transition between the two operating modescan be achieved by using a STS and ramping up the reference signal in a few con-secutive grid cycles during mode-shifting [101].
All the proposed control methods have been developed and implemented witha digital signal processor (DSP). Simulation and experimental results are providedto demonstrate the validity of the proposed control methods.
7.2 Control in stand-alone mode of operation
During a grid outage the DG system operates in stand-alone mode (shown inFig. 7.2) to supply uninterrupted power for local critical loads. The system is dis-connected from the grid by opening the STS. In this operating mode, the invertervoltage must be controlled and the control of the system is focused on the qualityof the output voltage.

7.2. Control in stand-alone mode of operation 185
Grid
Fuel cell
Inverter
Supercap.
Local
critical
loads
Three-port converter
dc-dc dc-ac
SPWM
Lf
Cf
Zl
Phase shift
Control and power flow
management
dc-ac
feedback
dc-dc
feedback
STS
POC
vO
iLD
iOiL+
-
iGvG+
-iC
VDL
vinv
+
-
vLD+
-
CDL
Figure 7.1: A line-interactive fuel cell UPS/DG system.
CDL
Lf
Cf
Local loads
POC
VDL
+
-
vO
+
-
vinv iLD
iOiL
iC
ZLD
Grid
STS
Figure 7.2: Inverter in stand-alone mode of operation.
7.2.1 Two-loop control strategy
Many control strategies have been explored in the literature [102]. The most com-monly reported scheme is the two-loop control strategy where the inner currentfeedback loop provides fast compensation for input supply disturbances and theouter voltage loop generates the reference for the inner current control loop. Thefeedback signal for the inner current loop can be either the filter capacitor cur-rent or the filter inductor current. Furthermore, various disturbance feedforwardschemes for decoupling can also be incorporated to improve steady-state trackingperformance. Capacitor current feedback is preferred because of its inherent abil-ity to forecast the change of the output voltage (iC = Cf dvO/dt, see Fig. 7.1).The capacitor current changes instantaneously with the load current change, irre-spective of the inductor current, and therefore provides a rapid control action tocorrect the output voltage [102].

186 Chapter 7. Inverter control and grid interfacing
Mag
nit
ud
e (d
B)
Phas
e (d
eg)
0
10
20
30
40
50
60
-45
0
45
90
-90
Bode diagram
Frequency (Hz)100 101 102 103
Figure 7.3: Bode plot of the proportional resonant (PR) controller.
7.2.2 Proportional-resonant (PR) controller
The combination of a proportional-resonant (PR) controller with capacitor currentfeedback is shown to be superior in achieving perfect reference tracking at thefundamental frequency [102]. The transfer function of the PR controller can bewritten as [96]:
Gv(s) = KP +2KIωcs
s2 + 2ωcs + ω21
, (7.1)
where KP and KI are the proportional and integral gain, and ω1 and ωc are thefundamental frequency and integrator low-frequency cutoff, respectively. The PRcontroller is mathematically equivalent to a synchronous frame PI controller. Itresonates at ω1 and thus has a very high gain around ω1, i.e., Gv(jw1) = KP +KI .The Bode plot of the PR controller is shown in Fig. 7.3, where KP = 1, KI = 160,ωc = 10 rad/s, and ω1 = 314 rad/s.
There are obvious advantages of using a PR controller instead of a PI one. API controller introduces infinite gain at dc. Therefore, the dc offset in the samplingand ADC circuit and/or the numerical error caused by the limited word-size of theDSP will be accumulated over time and eventually leads to saturation of the PIoutput. In some cases, PI-type controllers with an ideal integrator cannot functionin real setups. To solve this problem, the ideal integrator can be approximatedby a low-pass filter with a limited gain. Alternatively, a high-pass filter with asuitably low cutoff frequency can be used to filter out the dc components. Withthe PR controller the system open-loop gain at dc is low, while the gain at theresonant frequency can be very high. Therefore, the effect of offset and noise in theADC sampling and conversion circuit can be ignored. Table 7.1 gives a comparisonof PI and PR controllers.
Fig. 7.4 illustrates the two-loop control structure for the inverter in stand-alone

7.3. Control in grid-connected mode of operation 187
Table 7.1: Comparison of PI and PR controllers
Description PI controllers PR controllersOpen-loop gain at dc High LowSteady-state gain error at 50 Hz Yes EliminatedSteady-state phase error at 50 Hz Yes Eliminated
vOPR
+
-
P-
iC ++
+iLKPWM
1 1sCf
iLD
-++
+
+-
rL
-
1/ZLD
vO
1/KPWM
sLf
m vinv iLiLD***
KFI
KFV
KFI
Figure 7.4: Block diagram of the inverter control in stand-alone operating mode withouter capacitor voltage proportional-resonant (PR) control and inner in-ductor current proportional (P) control.
mode of operation with outer capacitor voltage PR control and inner inductor cur-rent proportional (P) control, where m is the modulation index, rL is the resistanceof the filter inductor, ZLD is the load impedance, KPWM = 400 is the invertergain, KFI = 3/64 is the feedback gain of iLD and iL, KFV = 1/410 is the feedbackgain of vO, and the gain of the inner current proportional controller is 1.5.
To provide overcurrent protection, instead of the capacitor current iC the in-ductor current iL and load current iLD are measured as the feedback signals. Sincethe capacitor current is the difference between the inductor current and the loadcurrent, this method is equivalent to simple capacitor current feedback control[102]. The PR compensator in the outer voltage regulation loop minimizes thesteady-state error. The inner current loop is implemented with proportional con-trol. In addition, an output voltage disturbance feedforward term is added to theoutput of the current controller to improve the system dynamics.
7.3 Control in grid-connected mode of operation
When the grid voltage is normal, the inverter is tied to the grid (the STS is closed)as shown in Fig. 7.5. The inverter is current-controlled. In this mode of operation,the DG system not only injects real power into the POC, but also compensatesfor the reactive and harmonic current demanded by local loads (to be explainedin Chapter 8). The equivalent model of the system and operating waveforms areillustrated in Fig. 7.6. The control objective is to minimize the harmonics of thecurrent injected into or drawn from the grid, that is, to keep a low total harmonicdistortion (THD).

188 Chapter 7. Inverter control and grid interfacing
CDL
Lf
Cf
POC
VDL
+
-
vO
+
-
vinv iLD
iOiL
iC
ZLD
Grid
iGSTS
Local loads
Figure 7.5: Inverter in grid-connected mode of operation.
Inv
GridLoad
iLD
iO iG
iO
iG
iLD
Grid-connected mode of operation
iO = iLD+iG
POC
Keep iG sinusoidal
Current source
Figure 7.6: Equivalent model of the system in grid-connected mode of operation.
7.3.1 Current regulation for single-phase inverters
Conventionally, PI-type ramp comparison controllers have been used to regulatethe inverter output current, although they have drawbacks such as steady-stateerror (both magnitude and phase) and limited disturbance rejection capability.These controllers are usually designed as an analog circuit. With a digital im-plementation the sample delay in the feedback loop reduces the phase marginsignificantly, and thus can cause stability problems.
Again, as in the stand-alone mode of operation, a PR controller similar to(7.1) can be used to regulate the inverter current in the grid-connected mode ofoperation:
Gi(s) = K + G1(s), (7.2)
where K is the proportional gain and G1(s) is the resonant controller for thefundamental component, given by
G1(s) =2KI1ωb1s
s2 + 2ωb1s + ω21
. (7.3)
Although there is a sampling delay, the PR controller has better stability thana PI controller because of larger phase margin2. Furthermore, all the computation
2A PI controller has a pole at dc (or at very low frequency for a non-ideal PI), thereforeintroducing a phase lag in the low-frequency range. A PR controller does not bring in this phaselag.

7.3. Control in grid-connected mode of operation 189
is performed in the stationary frame and no coordinate transformation is needed.The controller has good tracking performance for the fundamental signal. It shouldbe noted, however, that the tracking performance decreases at harmonic multiplessince a PR controller has its largest gain at ω1.
Other current control methods like predictive control [103] can also be imple-mented with digital control. However, this is beyond the scope of this work.
7.3.2 Selective harmonic compensation
Concerning harmonics, DG systems are subject to stringent rules. The IEEE 1547standard allows a maximum of 5% for the current THD with individual limits of4% for each odd harmonic from 3rd to 9th and 2% for 11th to 15th. It is possibleto implement selective harmonic compensation with resonant controllers [97], [99].Should harmonic compensation be applied to satisfy the standard, then Fig. 7.7shows the structure of the current controller, where GF (s) = iO(s)/vinv(s); KPWM
is the inverter gain; KFI is the feedback gain. For each harmonic, the transferfunction of the compensator has the form:
Gh(s) =2KIhωbhs
s2 + 2ωbhs + (hω1)2, (7.4)
where h = 3, 5, 7, . . ., according to the selected harmonic to be compensated.Designers can choose which harmonics have to be compensated according to thesituation at hand. To be implementable, the compensators have a passband withcertain width (2ωbh).
The Bode plot of the open-loop resonant control system for current regulationwith selective harmonic compensation, GA(s), is shown in Fig. 7.8, where the gainsof the 1st, 3rd, 5th, and 7th harmonics are significantly boosted by the resonancesat the harmonic frequencies. For comparison, the open-loop transfer functionwith only the proportional control, GB(s), is also plotted in Fig. 7.8. The plottedtransfer functions are
GA(s) = KPWMKFI (K + G1(s) + G3(s) + G5(s) + G7(s)) ,
GB(s) = KPWMKFIK.(7.5)
The parameters used for the Bode plot are K = 1, KI1 = KI3 = KI5 = KI7 = 20,ωb1 = 10 rad/s, ωb3 = ωb5 = ωb7 = 5 rad/s, ω1 = 314 rad/s, KPWM = 400, andKFI = 3/64. These parameters were used for simulation and experiment. Thecontroller was discretized and implemented with a DSP.
Note that in the actual implementation iL is measured as the feedback signalinstead of iO, since iC is very small. In both operating modes the measured currentfeedback signals are iL and iLD, which makes the control easy to implement. Acurrent control strategy for simultaneously operating the DG system as an activefilter will be presented in Chapter 8. The main role of the inverter is to injecta constant active power into the POC and compensate for the reactive power oflocal loads.

190 Chapter 7. Inverter control and grid interfacing
K+-iO m
KPWMiO
GF(s)
G3(s)
G5(s)
G7(s)
+
+
vinv
KFI
G1(s)
*
Figure 7.7: Structure of the proposed current controller – resonant current controllerwith selective harmonic compensation.
Phas
e (d
eg)
Bode diagram
Mag
nit
ud
e (d
B)
-20
-10
0
10
20
30
40
50
60
-180
-135
-90
-45
0
Frequency (Hz)100 101 102 103 10410-1
3rd
GB(s)GA(s)
GB(s)
GA(s)
Harmonic control (1st, 3rd, 5th and 7th )GA(s)
1st
5th
7th
Only proportional controlGB(s)
3rd
7th5th1
st
Figure 7.8: Bode plot of the open-loop resonant control system for current regulationwith selective harmonic compensation and with only proportional control.
7.4 High-performance PLL design
In grid-connected mode of operation, a fast and accurate PLL method is essentialbecause the generation of the current reference is based on the output of thePLL. As a result, the performance of the whole system is largely influenced bythe effectiveness of the PLL strategy, especially when the grid voltage contains

7.4. High-performance PLL design 191
harmonics and could be unbalanced. The synchronous reference frame PLL hasbeen widely used in three-phase systems for its good tracking performance [104].
7.4.1 Transport delay
In a three-phase system the grid frequency, phase angle and amplitude, can beeasily obtained from the voltage space vector. However, for a single-phase system,because of the lack of a quadrature signal, acquiring the phase-angle informationis much more difficult. The commonly used zero-crossing detection method doesnot provide instantaneous phase angle information of the grid and is sensitive tomultiple zero-crossings caused by noise. Therefore, the main issue of designing asingle-phase PLL is how to generate the virtual quadrature single and mimic abalanced three-phase system.
Among many proposed methods (like first-/second-order filters [105], inversePark transformation [106], hardware phase shifters, etc.), the transport delaymethod, as suggested in Fig. 7.9, is believed to be the simplest and most ef-fective one [98]. The input grid voltage is stored in memory using a data array.The quadrature component is obtained by accessing the data history with a delayof 1/4 grid cycle (T1/4). With this estimated quadrature signal, the single-phasesystem can be treated as a balanced three-phase system and most PLL controlstrategies for three-phase systems can be applied. The proposed PLL structurefor the single-phase situation is shown in Fig. 7.9, where vG is the sampled gridvoltage, and ωff = 314 rad/s is the feedforward term (for 50 Hz grid frequency).Note that an orthogonal filter is included in the PLL structure (see also Fig. 7.11).This is explained as follows.
7.4.2 Orthogonal filter
It is well known that the performance of the synchronous reference frame PLL isdegraded when the grid voltage is distorted [104], especially when the voltage isunbalanced. To improve the robustness of the PLL, an orthogonal filter can beused [100]. The following shows the mathematical derivation of this filter.
The stationary equivalent of an integrator in the synchronous reference framerotating at ω1 can be expressed as
GsI(s) =
1
s − jω1, (7.6)
where the superscript “s” indicates that the transfer function is expressed in thestationary frame and the arrow “→”denotes a vector transfer function (note thatboth the input and output are complex space vectors). The above transfer functionis obtained by substituting the integrator’s s with (s−jω1). The physical meaningof this transformation is that the frequencies of all quantities in the synchronousreference frame are shifted by ω1 when transferred to the stationary referenceframe.
In fact, a transfer function can be shifted between the stationary referenceframe and the synchronous reference frame. The stationary reference frame equiv-alent of a transfer function in the synchronous reference frame can be obtained

192 Chapter 7. Inverter control and grid interfacing
PI1s
cos
sin
Orthogonal
filter
VD = 0
++
Park transformation
VD
++
Multiply
vG
vα
(
vβ
(
1ω
1ω
ffω
vα
vβ
θ*
Delay
T1/4
Figure 7.9: Proposed PLL structure with a transport delay and an orthogonal filter forsingle-phase systems.
byHs(s) = He(s − jω1), (7.7)
where the superscript “e” denotes that the transfer function is expressed in thesynchronous frame. Similarly, the equivalent synchronous stationary frame trans-fer function is given by
He(s) = Hs(s + jω1). (7.8)
Appendix D provides a complete derivation of (7.7) and (7.8)3.Let us now design a unity-gain LPF for the synchronous reference frame:
GeLP (s) =
ωp
s + ωp
, (7.9)
where ωp is the pole frequency of the LPF in the synchronous reference frame.Then, in the stationary frame, the filter can be expressed as
GsLP (s) =
ωp
(s − jω1) + ωp
. (7.10)
Rationalizing the denominator yields
GsLP (s) =
ωp((s + ωp) + jω1)
(s + ωp)2 + ω21
. (7.11)
From the above equation, it is obvious that an LPF in the synchronous refer-ence frame is equivalent to a band-pass filter (BPF) in the stationary frame, ωp
3In fact, the rotating reference frame can rotate at an arbitrary speed for (7.7) and (7.8).

7.4. High-performance PLL design 193
rad/s
pω
'ω(a) LPF in the synchronous
reference frame rotating at
0
Gain (dB)
rad/s
1 pω ω+
ω
(b) Equivalent filter in the stationary reference frame
0
Gain (dB)
1ω
1 pω ω−
Passband
1ω A shift in the
reference frequency
pω−
1ω
Figure 7.10: Synchronous reference frame LPF and its equivalent in the stationaryreference frame.
corresponding to the half width of the passband. Fig. 7.10 illustrates the synchro-nous reference frame LPF and its equivalent in the stationary reference frame.For a space vector, rotating the reference frame effectively changes the rotatingfrequency of the vector [107].
The filter cleans the orthogonal voltage signals (a space vector) before they arefed into the PLL block. Therefore, the operation of the PLL is less sensitive todisturbances in the grid voltage.
Moreover, with the two orthogonal signals, the implementation of the filter issimple. Let vα +jvβ denotes the input of the filter and vα +jvβ the output. Then,we have
vα(s) + jvβ(s)
vα(s) + jvβ(s)= Gs
LP (s) =ωp
(s − jω1) + ωp
. (7.12)
After some manipulations, the following expressions can be obtained:
vα(s) =1
s[ωp(vα(s) − vα(s)) − ω1vβ(s)] ,
vβ(s) =1
s[ωp(vβ(s) − vβ(s)) + ω1vα(s)] .
(7.13)
Fig. 7.11 is a graphical representation of (7.13). Therefore, the orthogonal filterexpressed by (7.10) can be implemented using Fig. 7.11 [100]. As shown, onlya few calculations need to be performed. This is the biggest advantage of theorthogonal filter.
In summary, with the transport delay method and the orthogonal filter, a

194 Chapter 7. Inverter control and grid interfacing
+-
1s
1s
+
-
+++
-
1ω
1ω
pω
pω
vα
(
vβ
(
vα
vβ
Figure 7.11: Implementation of the orthogonal filter, where ωp = 20 rad/s and ω1 =314 rad/s are chosen for the experiment.
high-performance PLL for a single-phase system can be realized.
7.5 Grid status detection
To ensure a high-quality power supply for local loads, the utility grid status shouldbe monitored continuously in real-time. The grid status detection includes detect-ing outage, over-voltage, and under-voltage. Outage detection is carried out inevery sampling cycle by comparing the instantaneous grid voltage to a presetthreshold value. To avoid complications in the zero-crossing region the detectionis disabled there. Multiple-time sampling is used to avoid false outage detectioncaused by noise in the signal. The over-voltage and under-voltage detection areperformed by calculating the rms value of the grid voltage over a single grid cycle.This value is compared with a preset value. When an abnormal rms value is seen,the DSP initiates a counter. If the over-voltage or under-voltage persists for aperiod of, for instance, 10 grid cycles, the grid status is identified to be abnor-mal, and the gating signal of the STS is shut off immediately. Then, a transitionfrom grid-connected mode to stand-alone mode of operation is initiated. The STSdisconnects the system from the grid within half a grid cycle. In order to avoidfrequent transitions between the two operation modes, grid voltage sags or swellsshall not be considered as a grid fault, if the load can ride them through. Detailedspecifications depend on how sensitive the local loads are.
On the other hand, when the grid fault is cleared, a synchronization processshifts the inverter from stand-alone to grid-connected mode of operation. A seam-less transition can be achieved by ramping up the reference signal in a few consec-utive grid cycles [101]. The procedures for transitions are illustrated in Fig. 7.12.This will also be addressed in Chapter 8.
Since utility operators place a high priority on safety and on the reliability ofelectrical systems, effective islanding detection is another important issue with DGsystems. The detection method can be passive (voltage and frequency detection)

7.6. Simulation and experimental results 195
Switch to voltage-controlled mode using
the load voltage vLD as the reference at the
moment of disconnecting:
Ramp up the voltage in
a few grid cycles to the
desired value:
Grid fault detected
Shut off the STS gating signal vO vOref*
vO vLD*
Stand-alone
mode of operation
Turn on the STS gating signal
Grid normal
Switch to current-controlled mode using
the load current iLD as the reference at
the moment of reconnecting:
iO iLD*
Adjust vO to match vG both in
amplitude and phase
Ramp up the current slowly
to the desired value:iO iOref*
Grid-connected
mode of operation
Grid current zero crossing
Figure 7.12: Procedures for seamless transitions between the grid-connected and thestand-alone mode.
or active (active frequency drift). It has been suggested by [108] that the current-regulated inverter has a better performance in anti-islanding than the power-angle-regulated inverter. When the grid is de-energized and an islanding condition isdetected, the DSP opens the STS and separates the DG system from the grid.
7.6 Simulation and experimental results
The inverter control schemes were simulated with PSIM and Matlab/Simulink.A system prototype rated at 3.5 kW maximum power (according to the regula-tions for the maximum allowed single-phase power) was constructed. The inverterpower stage (including IGBT drivers) was manufactured by SEMIKRON (SEMI-STACK, Model: SKS40FB2C07V6) [109]. A photo of the inverter stack is shownin Fig. 7.13. It consists of 12 electrolytic capacitors used as the dc-link buffer, 6IGBT modules (Type: SKM75GB123D), and 2 IGBT drivers (Type: SKHI22A),as shown in Fig. 7.14. The inverter stack can operate at a maximum power of10 kVA at 20 kHz switching frequency4 It also comes with a three-phase rectifierbridge, however this was not used in the experiment. The inverter was operated at20 kHz switching frequency. Table 7.2 lists the main inverter design parameters.
All the control schemes were implemented with a TMS320F2808 DSP from
4The inverter is also intended to deal with harmonic and reactive power compensation. There-fore, it must have sufficiently high power capacity (higher than 3.5 kW).

196 Chapter 7. Inverter control and grid interfacing
Table 7.2: Inverter design parameters for simulation and experiment
Description Symbol ValueDc-link voltage VDL 400 VAc output voltage vO 230 V rmsAc output frequency fO 50 HzMaximum output power PO 3.5 kWSwitching frequency fs 20 kHzFilter inductor Lf 2 mHFilter capacitor Cf 10 µF
Electrolytic
capacitors
Drivers
Diode rectifier
IGBTs
Heatsink
Figure 7.13: Inverter stack used in the experiment – SEMISTACK from SEMIKRON,Model: SKS40FB2C07V6.
Driver Driver
6 in parallel
Out1 Out2
Figure 7.14: Power stage of the inverter stack SKS40FB2C07V6.

7.6. Simulation and experimental results 197
Entrance
Get ADC results and data conversion
Over-voltage/current protection
Get the virtual quadrature signal
Call orthogonal filterOperation mode switch
Sag or swell detection
Calculate the peak and rms of
the grid voltage
End of one
grid cycle?
Return
Calculate the sine and cosine
SA mode?
Call SA mode control Call GC mode control
Yes
Yes
GC mode or in
SA to GC transition?
Call PLL
No
No
SA: stand-alone GC: grid-connected
Yes
No
Figure 7.15: Flow chart of the DSP interrupt routine for the inverter control.
Texas Instruments. The PR controllers were discretized by using Bilinear (Tustin)method [76]. The sampling frequency was chosen equal to the switching frequency.A unipolar modulation scheme was adopted, which effectively doubles the switch-ing frequency of the output current and reduces the ripple to 50% of that withthe bipolar modulation scheme. As a result, the loss in the output LC filter isreduced.
Fig. 7.15 shows the simplified flow chart of the interrupt routine. Fig. 7.16 andFig. 7.17 detail the stand-alone and grid-connected control modes, respectively.Note that both transitions have to be accomplished in stand-alone control mode.The interrupt service routine is executed once per switching cycle, that is, 400times per grid cycle.
7.6.1 Inverter operation in stand-alone mode
The proposed inverter control scheme was simulated with PSIM7.0. Fig. 7.18(a)and Fig. 7.18(b) show the simulated waveforms with a resistive load and a dioderectifier load, respectively. As can be seen, in both cases the inverter output voltagevO is well regulated and the steady-state error (v∗
O−vO) is basically eliminated (theerror is determined by the gain of the PR controller at the resonant frequency).
The experimental results of the regulation of the output voltage vO in thestand-alone mode of operation are shown in Fig. 7.19(a), where a resistive loadwas used. Furthermore, Fig. 7.19(b) presents the measurement results for the

198 Chapter 7. Inverter control and grid interfacing
Voltage loop regulation (PR)
Current loop regulation (P)
Update comparator registers (SPWM)
Return
Grid normal?
Calculate the voltage reference
Call GC to SA
transition
GC to SA
transition?
No
YesYes
Entrance
SA: stand-alone
GC: grid-connected
Call SA to GC
transition
Stop SA to GC
transition
SA to GC
transition?
No
Yes
No
Figure 7.16: Flow chart of the stand-alone control mode.
regulation of vO with a diode rectifier load. In both cases vO is well regulatedwith low distortion. The noise in the measured signals is due to interference inthe long measuring cable.
7.6.2 Inverter operation in grid-connected mode
Simulation results for grid-connected mode of operation are presented in Fig. 7.20,showing that the inverter supplies the reactive and harmonic current demand ofthe local load (a diode rectifier) while it injects real power into the grid. The gridcurrent iG is almost in-phase and nearly sinusoidal.
The experimental results are shown in Fig. 7.21(a). A diode rectifier was usedas the local load. The inverter compensates for the reactive and harmonic cur-rent and injects active current into the grid. Good correlation is found betweenthe simulated and measured results (compare Fig. 7.20 with Fig. 7.21(a)). Forcomparison, Fig. 7.21(b) displays the waveform when the selective harmonic com-pensation is not implemented, showing the distorted waveform of the current iGin that case. The FFT results of the current iG are given in Fig. 7.22(a) (withselective harmonic compensation) and Fig. 7.22(b) (without selective harmoniccompensation). As can be seen, the low-frequency harmonics (3rd, 5th, and 7th)

7.6. Simulation and experimental results 199
Entrance
Grid status detection
Current regulation (PR) with selective
harmonic compensation
Update comparator registers
Return
Normal?
Estimate the active current component
Calculate the reactive and harmonic current
Synthesize the inverter current reference
Yes
No
Calculate the desired reactive current to be
injected into the grid
Calculate the in-phase current
proportional to the fuel cell power
SA: stand-alone
GC: grid-connected
Calculate the error between the
desired voltage reference and
the grid voltage
Shut off the STS gating signal
Set the operation mode to SA
when the current approaches zero
Set the voltage reference equal to
the grid voltage
Enable GC to SA transition
Figure 7.17: Flow chart of the grid-connected control mode.
are reduced significantly with selective harmonic compensation5.
7.6.3 Operation of the PLL
The PLL control strategy was investigated with Matlab/Simulink for various sit-uations. The parameters of the orthogonal filter were chosen as ω1 = 314 rad/sand ωp = 20 rad/s. These were also used for experiment.
For the proposed PLL structure, Fig. 7.23(a) shows the response to a 45o phasejump initiated at 0.5 s, and Fig. 7.23(b) demonstrates the operation of the PLLwith distorted grid voltage, showing that the output of the PLL is locked to thefundamental component of the input signal.
The experimental results are presented in Fig. 7.24. As shown in Fig. 7.24(a),having detected the normal grid status, the inverter starts the procedure to lockthe output vO to the grid voltage vG when the grid is re-energized. Furthermore,Fig. 7.24(b) displays the measured results of the PLL operation when the grid
5The harmonic components of the grid voltage vG are not exactly the same for the twomeasured results in Fig. 7.21(a) and (b). The harmonics of the grid voltage have an impact onthe harmonics of the current injected into the grid iG.

200 Chapter 7. Inverter control and grid interfacing
vO
iL
Output voltage
Inductor current
Voltage error
Capacitor current
vO - vO*
iC
Resistive load
(V)
(V)
(A)
(A)
vO
iL
Output voltage
Inductor current
Voltage error
Capacitor current
vO - vO*
iC
Diode rectifier load
(V)
(V)
(A)
(A)
(a)
(b)
Figure 7.18: Simulation results of the inverter operation in stand-alone mode with (a)a resistive load and (b) a diode rectifier load, showing the output voltagevO, inductor current iL, capacitor current iC , and voltage error v∗
O − vO.

7.6. Simulation and experimental results 201
vO
100 V/div
2 A/divTime:
5 ms/div
Time:
5 ms/div
vO
100 V/div
5 A/diviL
iL
(a) (b)
Figure 7.19: Experimental results of the output voltage vO and inductor current iL instand-alone mode of operation with (a) a resistive load and (b) a dioderectifier load.
vO iL* 20
vG
vO
iG* 20
iL*20
vG
Inverter output voltage Filter inductor currentvO iL
Grid voltage Current injected into the gridvG iG
iG*20
Figure 7.20: Simulation results of the inverter operation in grid-connected mode witha diode rectifier load, showing the output voltage vO, inductor current iL,grid voltage vG, and grid current iG.

202 Chapter 7. Inverter control and grid interfacing
vO
vG
100 V/div
100 V/div
5 A/div
4 A/divTime: 5 ms/div
iG
iL
vO
vG
100 V/div
100 V/div
4 A/div
Time: 5 ms/div
iL
5 A/div
iG
With selective harmonic compensation Without selective harmonic compensation
(a) (b)
Figure 7.21: Experimental results of the inverter operation in grid-connected mode (a)with selective harmonic compensation (3rd, 5th, and 7th), showing thecompensation of the harmonics of the local load (a diode rectifier) andinjection of active current to the grid, and (b) without selective harmoniccompensation.
0
0.5
1
1.5
2
2.5
3
Curr
ent
har
monic
s i G
(A
)
0 100 200 300 400 500 600 700 800 900 1000
Frequency (Hz)
With selective harmonic compensation
3rd5
th7th
0 100 200 300 400 500 600 700 800 900 10000
0.5
1
1.5
2
2.5
3
Frequency (Hz)
Curr
ent
har
monic
s i G
(A
)
3rd
5th7
th
Without selective harmonic compensation
(a) (b)
Figure 7.22: FFT results of the current injected into the grid, iG, (a) with selectiveharmonic compensation (3rd, 5th and 7th) (see also iG in Fig. 7.21(a)),and (b) without harmonic control (see also iG in Fig. 7.21(b)).

7.6. Simulation and experimental results 203
0.1 0.12 0.14 0.16 0.18 0.2 -1.5
-1
-0.5
0
0.5
1
1.5
Time (s)
PLL: distorted input
0.48 0.5 0.52 0.54 0.56 0.58 0.6-1.5
-1
-0.5
0
0.5
1
1.5
Time (s)
PLL: step response
(a)
(b)
Input
Output
Input
Output
Vo
ltat
e (p
.u.)
Vo
ltat
e (p
.u.)
Figure 7.23: Simulation results of the PLL, showing (a) response to a 45o step changein phase and (b) performance under distorted input.
vG 100 V/div
vO 200 V/div Time: 20 ms/div Time: 5 ms/div
vG 100 V/div
vO
200 V/div
(a) (b)
Figure 7.24: Experimental results of the PLL, showing (a) locking the phase of outputvoltage vO to the grid voltage vG when the grid is re-energized, and (b)the operation of the PLL with distorted grid voltage vG.
voltage vG contains harmonics. The grid voltage was produced by a 15 kVA gridemulator from SpitzenBerger+Spies (Model: DM15000/PAS, three-phase mainsemulation system consisting of three 5 kVA four-quadrant linear amplifiers). Ob-viously, the PLL locks the inverter output vO to the fundamental component ofthe grid voltage vG.

204 Chapter 7. Inverter control and grid interfacing
7.7 Conclusions
In this chapter, detailed control methods for operating a small single-phase DGsystem in both stand-alone and grid-connected modes have been presented.
A two-loop control strategy with capacitor current feedback is adopted forstand-alone mode control. To achieve zero steady-state error for both the voltageregulation in stand-alone mode and current regulation in grid-connected mode ofoperation, and to implement selective harmonic compensation, resonant controllersare used. PR controllers have obvious advantages over PI ones when trackingsinusoidal references. A PR controller can eliminate the steady-state error and ismore stable than a PI controller for controlling a single-phase inverter.
It has been shown that a high-performance PLL for a single-phase inverter canbe realized by means of a transport delay which generates a virtual quadraturesignal, thereby emulating a balanced three-phase system. Furthermore, an easy-to-implement orthogonal filter enhances the PLL performance when the grid voltageis distorted. The filter is designed in the synchronous reference frame and thentransformed to the stationary reference frame. The digital implementation of thefilter only needs a few calculations.
Additionally, the procedures for detecting the grid status and managing thetransition between the two operating modes were briefly discussed. An automaticand smooth transition between the two operating modes can be achieved by usinga static transfer switch and ramping up the reference signal in a few consecutivegrid cycles during the transition.
The effectiveness of the presented control methods has been proved by thesimulation and experimental results from a laboratory prototype.

Chapter 8
Line-interactive fuel cellUPS/DG system
1Both the three-port converter (the dc-dc stage) and the inverter (the dc-ac stage)have been investigated in the previous chapters. In this chapter we present thewhole system – a single-phase fuel cell powered UPS/DG system. The systemcan operate in both stand-alone and grid-connected modes. Moreover, an activefiltering function is integrated into the system. It is shown that a supercapacitorcan serve as both an active and a reactive energy storage. The system is suitablefor residential applications and can improve the power quality for the local user.
This chapter also covers the digital implementation of the proposed fuel cellgeneration system. It will be shown that the control of the whole system can becarried out by a single DSP. In particular, in order to eliminate limit cycle oscil-lations in digitally controlled dc-dc converters, the generation of high-resolutionphase shifts is explained in detail. Practical design issues such as the SOC man-agement of the supercapacitor and prototype design details are discussed as well.
8.1 Introduction
Sustainable energy electricity generation systems are gaining popularity due totheir environmental friendliness [110]. As an alternative to the conventional UPSconcept, small/micro DG systems provide standby service during grid outages and,
1This chapter is based on the following papers:
H. Tao, J. L. Duarte, and M. A. M. Hendrix, “A distributed fuel cell based generation and com-pensation system to improve power quality,” in Proc. IEEE International Power Electronicsand Motion Control Conference (IPEMC’06), Shanghai, China, Aug. 2006, pp. 1–5.
H. Tao, J. L. Duarte, and M. A. M. Hendrix, “Line-interactive UPS using a fuel cell as theprimary source,” IEEE Trans. Ind. Electron., to be published in 2008.
H. Tao, J. L. Duarte, and M. A. M. Hendrix, “High-resolution phase shift and digital imple-mentation of a fuel cell powered UPS system,” in Proc. 12th European Conference on PowerElectronics and Applications (EPE’07), Aalborg, Denmark, Sep. 2007, pp. 1–10.
205

206 Chapter 8. Line-interactive fuel cell UPS/DG system
when operated during peak load hours, potentially reduce energy costs. From thisperspective a small/micro DG system falls into the category of UPS systems.
Among various alternative generation systems, fuel cell technology has gen-erated lots of interest. In contrast to the short time emergency power providedby the UPS systems that rely on batteries, a fuel cell is able to support unlim-ited backup time as long as hydrogen fuel is supplied [36]. When designed asa line-interactive generator, a fuel cell system flexibly operates in stand-alone orgrid-connected mode according to the grid conditions [62], [95]. Due to the slowtransient response of the fuel cell [111], a storage element is necessary to assureproper operation of the fuel cell under various load conditions [65], [112]. In termsof transient energy storage a supercapacitor is preferred over batteries because ofits much longer lifetime and higher specific power. Owing to the absence of bat-teries, the system satisfies the demand for environmentally friendly clean energysources.
Different control schemes for UPS systems have been reported in the recentliterature, including the conventional multiloop control [102], repetitive-based con-trol [113], multiloop H-infinity control [114], down-sampled discrete-time internal-model-based control [115], etc. Much research effort has gone into the improvementof output voltage regulation, with the aim to improve transient performance andreduce harmonic distortion. However, a UPS/DG system that uses the emergingfuel cell technology in combination with supercapacitor storage is not that exten-sively investigated. Recognizing the flexibility of a hybrid system, we may expectadded functionality and a better system performance.
A generation system can be utilized as an active power filter (APF) [116], ashas also been proposed in line-interactive UPS systems [117], [118]. The reactivepower compensation is beneficial for the power system network. Such a systemminimizes real/reactive power imbalances that can affect the surrounding powersystem, therefore increasing the transmittable power.
The power conditioning unit of the proposed fuel cell system consists of agrid-interfacing inverter and a three-port bidirectional converter. The inverterprovides the necessary interface of the DG system to the grid voltage. Moreover,the active filtering function can be realized by a suitable control strategy. It isshown that a supercapacitor in a fuel cell system can serve as both an active anda reactive energy storage, and buffer the periodical low-frequency ripple in therequested power. This minimizes the dc-link capacitance and makes it possible touse a small non-electrolytic type. The lifetime and reliability of the system cantherefore be improved.
The design issues of the UPS/DG system are also presented. These include thedigital implementation of the control scheme with a single DSP (TMS320F2808)and the generation of high-resolution phase shifts. Thus far, few publications haveadequately presented effective solutions to the digital instrumentation of phaseshift, especially to the high-resolution phase shifting.

8.2. Description of the UPS/DG system 207
8.2 Description of the UPS/DG system
The topology of the proposed line-interactive UPS/DG system is shown in Fig. 8.1.A fuel cell is used as the primary source and a supercapacitor is employed as thetransient energy storage. The three-port converter interfaces the fuel cell andsupercapacitor to the inverter and manages the power flow in the system. In thissystem low-voltage energy storage devices can be used because their voltages canbe matched in the dc-dc stage.
The system operates in line-interactive mode. On the occurrence of a gridfault, the STS isolates the fuel cell system from the grid as a protective measure.This is especially important in case the fault creates a deep sag and requires acompensation current much larger than the equipment ratings [119]. A triac isused as the separation switch. This ensures that the grid can be disconnectedfrom the load within half a line cycle. Local loads are coupled to the inverteroutput. The terminals which are shared by the inverter output, local loads, andgrid are named POC (point of connection).
Because the implementation of a fuel cell system requires an auxiliary storagedevice to meet load changes, the dc-dc stage for a fuel cell power conditioningsystem has two power inputs – for the fuel cell and for the storage. A family ofthree-port converters presented in Section 6.3.3 can be used. In this implementa-tion, the TAB converter described in Section 2.3 is chosen2.
A voltage source inverter (VSI) is used for dc-ac power conversion and grid-interfacing. As described in Section 7.2, in stand-alone operating mode the inverteris voltage-controlled, whereas in grid-connected mode it is current-controlled. Themain function of the inverter is to maintain a regulated output voltage to powerthe local loads when operating in stand-alone mode, and when operating in grid-connected mode, to inject reactive and harmonic current required by the localloads, along with an optional constant real power, into the POC. Such opera-tion would prevent the power network from being contaminated by local nonlinearloads. However, the inverter must have sufficiently-high power capacity for han-dling both real and reactive power, while continuously conditioning the energysupplied by the fuel cell.
8.3 Flexible operation
The fuel cell system can operate both in stand-alone and grid-connected modes.As a common practice, when the utility grid voltage seriously sags or is completelyinterrupted, the system is disconnected from the grid and the local loads will bepowered by the fuel cell uninterruptedly. When the grid voltage returns to normal,the separation switch remains closed and the system operates in grid-connectedmode.
2The reasons for choosing the TAB topology are that: (1) the designed power rating of thesystem is relatively high, which leads to a full-bridge circuit topology; (2) the fuel cell that wehave in the lab (used as a battery charger) has a roughly regulated dc output; (3) the TABconverter is relatively easy to implement and control.

208 Chapter 8. Line-interactive fuel cell UPS/DG system
L2
40
0 V
L1
Fu
el
cell
+
L3
Sup
er
cap.+
CD
L
Lf
Cf
ST
S
Gri
d
Zl
dc-
dc
stag
e:
thre
e-port
TA
B c
onver
ter
dc-
ac s
tage:
full
-bri
dge
inver
ter
Hig
h-f
requen
cy l
ink
PO
C
VD
L
+ -v O
PF
C
+ -
+ -v in
v
i LD
i Oi L
23
0 V
, 5
0 H
z
gri
d-i
nte
rfac
ing
and l
oad
s
PS
C
PD
L
VF
C
VS
C
i G v G
54 V
27~
42V
Po
wer
flow
i C
Lo
cal
crit
ical
load
s
i FC
i 1 i 3
i 2v 2
v 1 v 3
i SC
i DL
Dc-
link
N1:N
2:N
3 =
2:1
5:1
Co
re:
E6
5-3
C9
4
Tra
nsf
orm
er
N1
N2
N3
Figure 8.1: Proposed single-phase line-interactive UPS/DG system using a fuel cell asthe primary source and a supercapacitor as the transient energy storage.

8.3. Flexible operation 209
Fuel
cell
Super
cap.Load
Real power
Reactive
power
GridPOC
STS
Possible real power
Real power
Reactive power
Figure 8.2: System power flow in stand-alone mode of operation.
8.3.1 Stand-alone mode of operation
System power flow
Fig. 8.2 illustrates the system power flow in stand-alone mode of operation. Asan energy source, the fuel cell supplies the load and charges the supercapacitor;however, it cannot absorb power. The reactive power in the system is handledby the supercapacitor. In the case of a regenerative load, the regenerative power,together with the power supplied by the fuel cell, charges the supercapacitor.
During a utility outage local loads are solely powered by the fuel cell system.Since the grid voltage is absent, the controller is dedicated to the regulation ofthe output voltage. The ac output voltage vO is regulated by using a standardtwo-loop control strategy, i.e., an outer voltage loop and an inner current loop, asdescribed in Section 7.2.
In this work, only one stand-alone fuel cell system is considered. If morefuel cell generation units or other microsources (e.g., photovoltaics, microturbines,etc.) are paralleled to power the load, an external power controller, e.g., thecommonly used voltage and frequency droop technique, should be included in thecontrol system to share the real and reactive power among those generators. Thevoltage reference for the inverter is then given by the external power control loop.However, this implementation is simplified to a single generator, and the voltagereference for the inverter in stand-alone operating mode is given straightforwardlyby a preset value.
Roles of the supercapacitor
As the transient energy storage, the supercapacitor plays two important roles.First, in order to overcome the slow dynamics of the fuel cell, energy stored in thesupercapacitor is used to handle a short-time load mismatch. As long as the loadvariation is momentary and the supercapacitor is not undercharged or overcharged,it is not necessary to adjust the fuel cell power and the fuel supply. However, ifthe load surge or dump persists, the fuel cell power can be adjusted according tothe current load demand.
Secondly, the supercapacitor deals with instantaneous power fluctuations. Thepower drawn by the inverter from the dc-link capacitor is periodical, containing

210 Chapter 8. Line-interactive fuel cell UPS/DG system
Fuel
cell
Super
cap.Load
Real power
Reactive
power
Grid
Real power
POC STS
Possible real power
Real power
Reactive power
Figure 8.3: System power flow in grid-connected mode of operation.
a second harmonic component of the grid frequency (e.g., 100 Hz ripple for a50 Hz grid). The reactive power has to be compensated somewhere in the system.A common way to cope with this low-frequency power ripple is to use a largeelectrolytic capacitor at the dc-link as a buffer for power decoupling (CDL as shownin Fig. 8.1). However, the dc buffer capacitor of an inverter is often the limitingfactor in terms of reliability and lifespan. We propose a novel approach to decouplethe periodical reactive power. Since in the dc-dc stage (the TAB converter) thesupercapacitor serves as an energy buffer, the need for power-decoupling at the dc-link can be eliminated as long as the control loop has sufficient bandwidth. Usuallythe bandwidth of the dc-dc stage is more than sufficient for guaranteeing a stiffdc-link voltage to decouple the 100 Hz power ripple3. This will be demonstratedin the simulation and experimental results in Section 8.6. As a result, the dc-linkcapacitor is only used to filter out the high-frequency switching ripple of the dc-dcstage. Such operation will reduce the energy storage requirement of the dc-linkcapacitor significantly. Therefore, a small non-electrolytic type capacitor may beused. This will undoubtedly improve the lifetime and reliability of the system.
8.3.2 Grid-connected mode of operation
System power flow
In grid-connected mode of operation, the STS is closed, connecting the system tothe grid. The power flow in grid-connected mode of operation is shown in Fig. 8.3.The supercapacitor acts as a buffer for the reactive power that results from thereactive and harmonic current of local loads. Since the grid is a virtually unlimitedbuffer for real power, it is not necessary for the supercapacitor to balance the powerdifference between the fuel cell and the load. Any variation in the load real powerdemand can be supplied by the grid, while the fuel cell is operated at a constantpower. The grid can either supply or absorb power at the POC depending on thefuel cell generation and the load demand.
In this operating mode, the VSI is controlled in current mode. We propose thatthe fuel cell system not only injects real power into the POC, but also compen-sates for the reactive and harmonic current produced by local loads. The system
3This is also the case for the grid-connected mode of operation.

8.4. Combining generation with active filtering 211
combines a generation system with active power filtering. This will be explainedin Section 8.4.
8.3.3 Seamless transition between the two modes
A seamless transition between the two operating modes should be guaranteedin order not to disturb the operation of sensitive loads. Because the inverter isoperated as a current source in grid-connected mode and as a voltage source instand-alone mode, special cares should be taken when switching between the twooperating modes.
Suppose that the inverter is operating in grid-connected mode, the procedureto shift from grid-connected mode to stand-alone mode can be described as follows[101] (see also Fig. 7.12 on page 195). First, the control circuit detects a fault onthe grid (e.g., the grid voltage drops below a preset minimum value). Then, thecontrol circuit shuts off the gate signal to the STS, and starts to monitor themagnitude and phase of the load voltage. At the moment the grid current hasits first zero crossing, the inverter is switched to voltage-mode operation with theload voltage as the reference. Finally, by ramping up the magnitude of the loadvoltage to the nominal value, the transition procedure finishes. The whole processmay take a few consecutive grid cycles to ensure a smooth transient.
On the other hand, when the fault on the grid is cleared, a synchronizationprocess should shift the inverter from stand-alone to grid-connected mode of op-eration [101]. First, the grid voltage is inspected and verified to be within thetolerance limits (both voltage and frequency) of the sensitive loads. Once a nor-mal grid voltage is detected, the control algorithm adjusts the load voltage tomatch the magnitude and phase of the grid voltage. During the synchronization,it should be ensured that the voltage and frequency of the inverter output do notvary by a large amount and remain within the tolerance limits of the load equip-ments. This can be done by ramping the error signals from zero to their finalset points over several cycles. When the voltages at both sides of the separationswitch are locked both in magnitude and phase angle, the STS can be turned on.At the instant of reconnection the inverter is turned to current control mode andthe current reference is slowly ramped to the desired value.
By the aforementioned procedures, a smooth mode shifting can be accom-plished. However, in the case of supplying energy to a resonant load, a specialprocedure should be developed to solve the so-called islanding problem [120].
8.4 Combining generation with active filtering
8.4.1 Inverter current reference calculation
Recognizing the flexibility of the system, we propose to operate the UPS/DGsystem simultaneously as an active filter. This added functionality can totally berealized by control software, and needs no extra hardware.
It is critical to obtain an accurate current reference for compensation usingcertain reactive and harmonic current calculation methods. Without compensa-

212 Chapter 8. Line-interactive fuel cell UPS/DG system
tion, the line current iG is distorted by the harmonic-producing loads. It is madeup of four terms [121]:
iG(t) = iD(t) + iP (t) + iQ(t) + iH(t), (8.1)
where iD(t) is the dc component, iP (t) is the in-phase line current, iQ(t) is thereactive current, and iH(t) represents the harmonic currents. The dc componentis usually small or does not exist at all. The unwanted components are mainlythe reactive current and harmonic currents. To shape iG as an in-phase sinusoid,a common way is to subtract the active current component iP (t) = IP sin(ω1t)from the measured load current iLD(t), where IP is the peak value of the in-phasecurrent, sin(ω1t) is the in-phase sinusoid, and ω1 is the angular frequency of thefundamental component of the grid voltage vG. The current to be compensated,iF (t), is
iF (t) = iLD(t) − IP sin(ω1t). (8.2)
Simultaneously, the inverter injects energy into the POC, proportional to thepower delivered by the fuel cell. To do this, an in-phase current reference, i∗PFC (t),is superimposed on iF (t). As suggested in Fig. 8.4, the reference i∗PFC (t) is de-termined in accordance with the desired fuel cell power P ∗∗
FC (issued by the SOCmanager, see Fig. 3.8 on page 78) and the grid voltage vG as
i∗PFC (t) = I∗PFC sin(ω1t) =2P ∗∗
FC
VG
sin(ω1t), (8.3)
where VG is the peak value of the fundamental component of vG. In combinationwith the feedforward term given by (8.3), a low-bandwidth PI controller can beused to correct estimation errors and give the active current command accordingto the power supplied by the fuel cell.
In some cases, an injection of reactive power into the grid may be desirable inorder to improve the overall power factor. A third current command term can besuperimposed on the current reference of the inverter:
i∗Q(t) = I∗Q cos(ω1t) =2Q∗
VG
cos(ω1t), (8.4)
where Q∗ is the wanted reactive power injected into the grid (a positive sign forcapacitive power, and a negative sign for inductive power). This is in fact an open-loop feedforward. For a three-phase system, the decoupled active and reactivecurrent control can achieve independent active and reactive power regulation bymeans of PI regulation in the synchronous reference frame.
On the basis of (8.2), (8.3), and (8.4), the inverter current reference, i∗O(t), isgiven by
i∗O(t) = iF (t) + i∗PFC (t) + i∗Q(t)
= iLD(t) +
(2P ∗∗
FC
VG
− IP
)sin(ω1t) +
2Q∗
VG
cos(ω1t).(8.5)

8.4. Combining generation with active filtering 213
iLD
-
+
iF
PFC
vG
Current
controller
Grid and
local loads
LPF Integrator
PLL1sin tω
iP iO
Feedback
iPFC
+
+
In-phase sinusoid
Active-current estimator
KPWM
ˆPI∆ Multiply
Multiply
PIPFC
+
+
+-
iO
+ -
Q*
+
+1cos tω
Amplitude calculation
Amplitude calculation
iQ
m
vinv
iO
**
*
*
*ˆPI
*ˆQI
*ˆPFCI
Multiply
ˆGV
Multiply
Figure 8.4: Control scheme for grid-connected mode of operation with integrated activefiltering function.
The power flow from the grid to the connecting point can be written as
PG =VGIP
2− PFC . (8.6)
A positive PG means that the grid is powering the load together with the fuel celland a negative sign means that a surplus power is injected into the grid.
As mentioned in Section 7.3, in the actual implementation iL instead of iO isthe feedback signal. Since iL = iO+iC , in view of (8.4), iC can also be compensatedfor (if desired) by an injection of a capacitive current into the POC:
i∗QC(t) = ω1CVG cos(ω1t). (8.7)
In both operating modes the measured current feedback signals are iL and iLD.This unified feedback scheme simplifies the implementation.
8.4.2 System control strategy
Fig. 8.4 shows the control scheme, including the active-current estimator, ampli-tude estimators, a current controller, and a phase locked loop (PLL) for generatingthe in-phase sinusoid.
The active-current estimator shown in Fig. 8.4 employs a feedback loop and anintegral gain block to accurately calculate the in-phase current ip(t) [121]. Thismethod is frequency-independent and does not need precise components. Theprinciple of operation is quite simple. Because of the integrator present in the sig-nal loop, the output iF (t) will not contain any in-phase component in steady statesince it has been subtracted. The in-phase component of the load current iLD(t)

214 Chapter 8. Line-interactive fuel cell UPS/DG system
Fuel
cell
Supercap.
Converter
dc-dc
Lf1
Cf1
Inverter 1
dc-ac
Inverter 2Lf2
Cf2
STS
Grid
Zl
Series inverter
dc-ac
Parallel inverter
Sensitive
and critical
loads
Three-phase
Figure 8.5: Overall system structure of unified power quality conditioner (UPQC).
is completely removed by the integrating action of the feedback loop in the currentestimator. After multiplication with the in-phase sinusoid, no dc component willbe present. Otherwise, ∆IP would not be zero in steady-state and the integratorwill force it to zero by feedback. This method requires a low-distortion sinusoidwith good phase tracking with respect to the grid voltage. For this purpose, ahigh-performance PLL generates a line voltage in-phase sinusoid with zero phaseerror in steady state. The PLL structure has been described in Section 7.4.
The VSI can be controlled as a current source to follow the current reference.Many control techniques such as hysteresis control, ramp comparison, predictivecontrol, etc., have been proposed [122]. In Section 7.3, we have presented theselective harmonic current compensation using resonant controllers for currentregulation of grid-connected inverters. With the proposed control strategy, thereactive power is compensated for by the fuel cell system and the grid is preventedfrom being contaminated by the harmonic-producing loads.
Note that active power filtering may not be necessary for single-phase ap-plications. The proposed scheme is meant to show that reactive and harmoniccompensation can be realized by the system at almost no additional cost. For alarger power scale three-phase implementation, the added functionality of activepower filtering will definitely make sense.
8.5 System function extension
8.5.1 Unified power quality conditioner
To compensate for voltage harmonics, flicker, sags, and swells, Fig. 8.5 shows theunified power quality conditioner (UPQC) system structure [123]. It comprises aparallel and a series inverter. UPQCs have been used in three-phase systems toenhance power quality, including voltage balancing, sag compensation, harmonicblocking, and flicker mitigation. The operating principle of a UPQC is usually asfollows. The parallel inverter (Inverter 1), controlled as a current source, injects acompensating current into the grid to shape the supply currents drawn or injected

8.5. System function extension 215
by the system as balanced sinusoids. The series inverter (Inverter 2), controlledas a voltage source, produces a voltage in series with the grid voltage to maintaina balanced sinusoidal voltage for sensitive and critical loads.
Recently, a still different control strategy aiming for microgrid applications hasbeen described in [124]. The system topology remains identical with the UPQCexcept that both inverters are in a three-phase four-leg configuration. Oppositeto the control strategy of UPQC systems, it has been proposed that the paral-lel inverter is used for voltage regulation and power control (i.e., Inverter 1 iscontrolled as a voltage source), and the series inverter is used for line current bal-ancing and fault current limiting (i.e., Inverter 2 is controlled as a current source).The series inverter injects negative- and zero-sequence voltages through the seriestransformer to balance the line currents such that the drawn/injected line currentsare balanced and sinusoidal.
For low-power single-phase applications, it is not necessary to have the seriescompensation, provided that the control system can seamlessly transfer betweenthe two operating modes. The control circuit continuously monitors the utilitygrid status. When the control system detects a utility disturbance condition thatis beyond the tolerance limits of the sensitive loads, it disconnects the systemfrom the grid and controls the inverter to maintain a regulated ac voltage. Af-ter the disturbance, the controller reconnects the system to the utility using itssynchronization process.
8.5.2 Energy management
An energy management algorithm can be developed adapting to the grid loadprofile and electricity pricing scheme set by distribution companies. Residentialcustomers avoid high electricity rates at peak time, and the power grid benefitsfrom load control. For instance, the fuel cell could generate its maximum powerduring the peak load hours. Operating at the maximum power point is preferredin order to achieve the maximum utilization of the fuel. During the off-peak hourswhen the rates are low, the fuel cell operates at minimum power. In grid-connectedmode of operation, users have the freedom to choose a set point for the fuel cellpower. Therefore, a user-specified preset fuel cell power profile according to thepricing scheme can be used as an input to the system.
If the fuel cell system is only used for emergency power, the fuel cell powerreference P ∗
FC can be set to zero when the utility power is present. The controlscheme maintains the supercapacitor fully charged while compensating for theharmonic and reactive current. At the moment a blackout occurs, the energystored in the supercapacitor will first be used to power the load while the fuel cellis slowly shifting from the standby mode to the service mode.
Note that an SOC manager has to be incorporated in the control scheme tokeep the voltage of the supercapacitor in the allowed range. In stand-alone mode,charging/discharging the supercapacitor is managed by slightly adjusting the fuelcell power reference P ∗∗
FC , whereas in grid-connected mode, this is done by making
a small change to the active current reference I∗PFC .

216 Chapter 8. Line-interactive fuel cell UPS/DG system
PFC
PSC
PDL
PFC
PSC
PDL
0 10ms 30ms 40ms20ms
Pow
er (
W)
Pow
er (
W)
PFC Power supplied by the fuel cell
PSC Power supplied by the supercapacitor
PDL Power consumed by the inverter
(a)
(b)
0 10ms 30ms 40ms20ms
Figure 8.6: Simulated results of the power flow in the dc-dc stage (the TAB converter)with an inverter load, showing (a) sufficient bandwidth for PFC control,and (b) insufficient bandwidth for PFC control.
8.6 Verification of power decoupling
8.6.1 Simulation results
To verify the proposed power decoupling method in Section 8.3.1, the TAB con-verter was simulated with an inverter as its load. The ac load of the inverter was aresistor in series with an inductor. Fig. 8.6 shows the simulated results by PSIM7.0with the closed-loop control scheme presented in Section 3.4. In (a), it can be seenthat the fuel cell power PFC is kept approximately constant at 1 kW while thefluctuations in the delivered power PDL (the power consumed by the inverter)are buffered by the supercapacitor. However, this is on condition that the fuelcell power control loop has sufficient bandwidth. Otherwise, there will be a low-frequency ripple in PFC , as demonstrated in Fig. 8.6(b). Although the bandwidthof the fuel cell power control loop is deliberately tuned low to avoid interactionwith the control loop that regulates the output dc-link voltage VDL (as discussedin Section 3.5.3), it can normally be sufficient to remove the double-line-frequencypower ripple.
8.6.2 Measurement results
The experimental results of the power flow in the system at different bandwidthsof the fuel cell power control loop are shown in Fig. 8.7, where iFC , iDL, and iSC
(as indicated in Fig. 8.1) are the fuel cell current, current drawn by the inverter,

8.7. Resolution and limit cycle 217
iFC
iDL
iSC
(a) (b)
iFC
iDL
iSC
Time: 5 ms/div Time: 5 ms/div
Figure 8.7: Experimental results of the power flow in the dc-dc stage (the TAB con-verter) with an inverter load, showing (a) sufficient bandwidth for PFC con-trol, and (b) insufficient bandwidth for PFC control. In both figures: iFC
(10 A/div), iDL (0.2 A/div), iSC (2.5 A/div), at a time base of 5 ms/div.
and the supercapacitor current, respectively. They are representative for powersince the voltages at all the ports remain unchanged. As shown, the periodicalreactive current in iDL is compensated for by the supercapacitor.
In summary, the presence of the supercapacitor storage in the system leads tomany benefits. Not only can the transients in the load be compensated for by thesupercapacitor, the periodical reactive power resulting from the inverter can bedealt with in the same way. This advantage eliminates otherwise needed energybuffers in the rest of the system as long as a sufficient bandwidth is guaranteed.The drawback of this control strategy, however, is that the system losses mayincrease since the reactive power has to be processed by the dc-dc stage. Butfor the conventional solution, the buffer capacitors at the dc-link are also lossycomponents because of the ESR.
If a battery is chosen as the storage, a buffer at the dc-link may still be necessaryto decouple the periodical reactive power drawn by the inverter because, in orderto prolong the lifetime, batteries should not be charged/discharged by periodicalreactive power.
8.7 Resolution and limit cycle
Limit cycle oscillations in digitally controlled dc-dc converters are a difficult prob-lem. In this section the generation of high-resolution phase shifts, which is impor-tant to minimize their impact, is explained.
8.7.1 Resolution of digital PWM and phase shift
A practical problem that was encountered when implementing the digital controlwas the occurrence of limit cycle oscillations (LCO): steady-state oscillations of the

218 Chapter 8. Line-interactive fuel cell UPS/DG system
output voltage at frequencies lower than the converter switching frequency [125].As a result of nonlinear quantization effects in the used analog-to-digital converter(ADC) and digital pulse-width modulator (DPWM), digitally controlled dc-dc con-verters can exhibit undesired LCO. The problem can also be seen as insufficienttime resolution in the digital modulator to satisfy specified output voltage regula-tion accuracy. The general quantization effects and no-limit-cycle conditions havebeen extensively analyzed in [126] and [127]. To increase the effective resolution ofthe DPWM, a few techniques such as dithering, multiphase averaging [126], andso-called cycle-skip [128] can be applied. The cause of LCO with a digital phaseshift (DPHS) modulator is similar.
To eliminate LCO, it has to be ensured that under all circumstances there isa quantized steady-state voltage that results in a zero-error value. This can beguaranteed if the resolution of the DPWM is sufficiently higher than the resolutionof the ADC. For the DPHS, the problem of limit cycling is even worse because thephase shift only varies from 0 to π/2 maximum for the full control range (from zeroto maximum power) as discussed in Section 2.2. This imposes more constraintson the implementation of high-frequency DPHS controlled converters. To be morespecific, the following condition has to be met
NDPHS > NADC + log2
(π
2Vo
·∣∣∣∣∂Vo
∂ϕ
∣∣∣∣ϕo
), (8.8)
where NDPHS is the resolution (in bits) of the DPHS, Vo is the converter outputvoltage, NADC is the ADC resolution (in bits) of Vo, ϕ (in radians) is the controlvariable – the phase shift, and ϕo is the phase shift at the operating point. Inshort, the resolution requirement is directly related to how sensitive the output isto the change of the control variable.
Furthermore, the inclusion of an integral term in the control law is necessaryto eliminate LCO [126]. The digital integrator is intended to fine-tune the outputvoltage. It is recommended to simply use a 32-bit integrator in a 16-bit fixed-pointDSP so that an error less than one LSB will not be neglected.
8.7.2 High-resolution phase shift with TMS320F280x DSP
For the TAB converter, the resolution of the phase shift is essential to optimize theconverter performance. The effective resolution for the conventionally generatedPWM is a function of PWM frequency and system clock frequency, i.e.,
NDPWM = log2 (TPWM /TSYSCLK ) , (8.9)
where NDPWM is the resolution (in bits) of the DPWM, and TPWM and TSYSCLK
are the PWM period and timer clock period4, respectively. For example, to gener-ate a 100 kHz switching frequency with a 100 MHz DSP timer clock, the resolutionof the DPHS is only 8 bits, which is insufficient because the ADC usually has morethan 10 bits of resolution.
4The timer clock period equals the CPU clock period of the DSP.

8.7. Resolution and limit cycle 219
Coarse step size = 10 ns
@ 100 MHz CPU frequency MEP step size
Timer clock cycle
PWM outputs
Phase shift
Figure 8.8: Micro edge positioner (MEP) operation logic.
Phase shift
controller
output
High 10 bitsOffset
correction
Count up
( phi = -phi )
Count
downTBPHS (16)
High-resolution phase shift register (16-bit)
Regular phase shift register (16-bit)
Single 32-bit write
phi >= 0?
Phase shift
limiter
phi
TBPHSHR (8) Reserved (8)
TBPHS (16) TBPHSHR (8) Reserved (8)
Load TBPHS
register
Low 6 bitsLoad TBPHSHR
register
phi_HR
Yes
No
Figure 8.9: Simplified DSP implementation of the high-resolution phase shifting.
The Texas Instruments C2000 280x digital signal controller offers high-resolutionPWM (HRPWM) and phase shift (HRPHS) in its enhanced PWM (ePWM) mod-ules. The HRPWM is based on micro edge positioner (MEP) technology, whichcan finely position an edge by sub-dividing one coarse system clock cycle of a con-ventional PWM generator [129]. Fig. 8.8 shows the coarse system clock and MEPsteps. The MEP step is controlled via an 8-bit field in an extension register. TheMEP can be programmed to provide precise position control on the rising edge(RE), falling edge (FE) or both edges (BE) at the same time. FE and RE are usedfor power topologies requiring duty cycle control, while BE is used for topologiesrequiring phase shifting. By configuring the MEP to BE mode, the built-in MEPunit can achieve a maximum 150 ps resolution phase shift [129], which therebyprovides a maximum equivalent 6 bits extra resolution. For 100 kHz switchingfrequency, the resolution of the phase shift can achieve 14 bits.
Fig. 8.9 shows the simplified DSP program flow chart to use the HRPHS for a16-bit fixed-point implementation. The output of the phase shift controller is a 16-bit phase shift value. Then, the low 6-bit value is loaded into the high-resolution

220 Chapter 8. Line-interactive fuel cell UPS/DG system
t
Sync. pulse
Master
module
Lag
phi > 0
Lead
phi < 0
Count down after synchronization
Count up after synchronization
Positive
phase shift
Timer
phi
phi
Negative
phase shift
Figure 8.10: Realization of a positive and negative phase shift.
ePWM1A
ePWM2A
Time: 10 ns/div
Positive phase shift
ePWM2A
Time: 10 ns/div
Negative phase shift
(a) (b)
3 ns 4 ns
ePWM1A
Figure 8.11: Measurement results of the high-resolution phase shifting of theTMS320F2808 DSP, showing (a) a positive phase shift and (b) a nega-tive phase shift.
phase shift register (TBPHSHR) and the high 10-bit is the regular phase shiftvalue (phi). One detail discovered when implementing the high-resolution phaseshift was that there is an internal offset of two CPU cycles in the regular phaseshift. This can be corrected by subtracting 2 from phi. When the counter ofthe master module reaches zero, all the phase shift modules are synchronizedto the master module and the counters are loaded with the updated phase shiftvalues. A negative phase shift (i.e., leading the master module) can be realizedby setting the direction of the counter to count-up as illustrated in Fig. 8.10.Fig. 8.11 demonstrates the generation of the high-resolution phase shift at a timebase equal to the CPU cycle (10 ns/div), where in (a) ePWM2A lags ePWM1A(the reference) by 3 ns and in (b) ePWM2A leads ePWM1A by 4 ns. As can beseen, a very precise phase shifting can be achieved.
Alternatively, the HRPHS can also be used based on a per unit representationof the control variable. It is quite common to express the phase shift commandissued by the digital controller in a per unit or percentage basis. For instance,

8.8. DSP implementation of the system control 221
the maximum phase shift (π/2) can be expressed as 1.0, then the output of thecontroller is between 0 and 1. TI provides the IQmath library, which is a collectionof optimized mathematical functions to port the floating point algorithm into 32-bit fixed-point code. With the IQmath library, the per unit calculation can beeasily implemented. An example of how to use the HRPWM with the per unitrepresentation of the control variable has been supplied by TI in [129]. Similarly,for using the HRPHS, Fig. 8.12 illustrates the mapping scheme between the perunit phase shift and the value loaded into the register. First, the phase shift phi puis multiplied by the PWM period PwmPeriod. The resultant is then divided intothe integer part phi as the quotient which supplies the coarse CPU steps and thefractional part frac which will be positioned by the MEP logic. Following that,the fractional part is multiplied by the MEP scale factor MEP SF , left-shifted by8 bits, and added to the rounding constant 180h. Finally, the result is combinedwith the integer part to form a 32-bit fixed-point phase shift value phi : phi HRwhich is loaded into the register. It should be noticed that when the phase shiftis negative, the absolute value is used, and the fractional part frac is corrected as
frac ← 1 − frac, (8.10)
and one is added to the integer part
phi ← phi + 1. (8.11)
This guarantees a continuous and smooth phase shift in both the positive andnegative regions.
Note that the MEP scale factor MEP SF varies with the system clock andDSP operating voltage and temperature. To solve this problem, TI supplies anoptimizing C function which determines the optimal number of MEP steps perCPU cycle according to the CPU operating conditions. As suggested by TI, thescale factor varies slowly over a limited range with the system clock and DSPoperating voltage and temperature, so the optimizing C function can be run as avery low priority background routine.
8.8 DSP implementation of the system control
This section discusses the digital implementation of the system. It will be shownthat the control of the whole system including both the dc-dc and dc-ac stagescan be carried out by a single DSP.
8.8.1 Control of the dc-dc and dc-ac stages
In an attempt to simplify the control design and eliminate the communicationoverhead between multiple DSPs, both the dc-dc and dc-ac stages are controlled bya single DSP (TMS320F2808). The DSP system has six independently configurableePWM modules (two PWM outputs per module). Each ePWM module can bedirectly operated in phase shift modulation mode by hardware. There is no needto implement the digital phase shift with a software interrupt routine as presented

222 Chapter 8. Line-interactive fuel cell UPS/DG system
phi_pu * PwmPeriodphi_pu * PwmPeriod
Return
Entrance
PhaseShift (p.u.)
issued by controller
Combine as a 32-bit value (phi : phi_HR)
frac * MEP_SF
<< shift left by 8 bits
Integer part
+ 180h rounding constant
Load TBPHS register
>= 0?
Count upCount down
Y N
Absolute value
phi_HR
Offset correction
Fractional part
frac 1 - frac phi phi + 1
Integer partFractional part
phi_pu
frac
|phi_pu|
phi
frac
phi
Figure 8.12: Mapping scheme of the high-resolution phase shifting for a per unit rep-resentation of the control variable.
in Section 3.6.1. This saves time for the CPU to execute time-critical tasks. Asillustrated in Fig. 8.13, out of 12 PWM outputs, eight (ePWM module 1, 2, 3, and4) are configured in phase shift mode to control the dc-dc stage and the remainingfour PWMs (ePWM module 5 and 6) are in PWM mode and used for the dc-acstage control. With the HRPHS the dc-dc stage is operated at 100 kHz switchingfrequency (a higher switching frequency would also be possible), whereas the dc-acstage is switched at 20 kHz (maximum frequency for the IGBTs used).
Two ADC sequences (AdcSeq1 and AdcSeq2) are used for the dc-dc and the

8.8. DSP implementation of the system control 223
ePWM1
ePWM2
ePWM3
ePWM4
ePWM5
ePWM6
Fuel cell
full-bridge
Load
full-bridge
Supercap.
full-bridge
Inverter
full-bridge
ePWM1A
eZdsp
2808
ePWM1B
ePWM2A
ePWM2B
ePWM3A
ePWM3B
ePWM4A
ePWM4B
ePWM6A
ePWM6B
ePWM5A
ePWM5B
Figure 8.13: Assignment of the PWM outputs for the control of the whole system.
dc-ac stage, respectively. The ADC control registers are set up such that the A/Dconversions are triggered when the counters are zero. As soon as the conversion iscomplete, the ADC module generates an interrupt. The dc-dc stage interrupt hashigher priority than the dc-ac stage interrupt because the dc-dc stage switchingfrequency is five times higher and thus this interrupt routine is more time critical.The priority arrangement is done by deliberately re-enabling the CPU interruptat the very beginning of the dc-ac stage interrupt routine so that the dc-dc stageinterrupt can be responded to by the CPU when it is busy executing the dc-ac stage interrupt routine. Fig. 8.14 illustrates the timing of the two interruptroutines and the ADC sampling periods. It can be seen that both stages can becontrolled by the DSP. A third interrupt (not shown in Fig. 8.14) is also enabledfor synchronizing the inverter output to the grid voltage, interrupting at 50 Hzonly when the system is in the transition of synchronization with the grid voltage.
Fig. 8.15 illustrates the timing of the dc-dc stage and dc-ac stage interruptsmeasured from the experimental prototype. The dc-dc stage interrupt consumesaround 50% of the CPU computational power at a sampling frequency of 100 kHz.In grid-connected mode of operation the execution time of the dc-ac stage interruptroutine is longer than in stand-alone mode of operation because of extra calcula-tions such as phase-locked loop (PLL), harmonic compensation, inverter currentreference calculation, etc. The total CPU load for both the dc-dc stage and dc-acstage interrupts is around 70%.
The control scheme for the dc-dc stage (see Section 3.4) regulates both the dc-link voltage VDL and fuel cell power PFC by controlling the two phase shifts. TwoPI controllers are used, which gives satisfactory dynamic performance (as discussedin Section 3.5.3). Each controller is programmed with anti-windup protection. Thecontroller is based on a digital approximation of an analog backward Euler scheme.

224 Chapter 8. Line-interactive fuel cell UPS/DG system
dc-ac stage: Timer 5, 6
dc-dc stage interruptsdc-ac stage interrupt
dc-dc stage: Timer 1, 2, 3, 4
coun
t up
2500
0
Counte
r val
ue
t
AdcSeq1 conversion
dc-dc stage interrupt dc-ac stage interrupt background task
AdcSeq2 conversion
dc-ac stage sampling period
dc-dc stage
sampling
period
500
count down
Figure 8.14: ADC sampling and timing of the two interrupts.
dc-dc stage interrupt
dc-ac stage interrupt
dc-dc stage interrupt
dc-ac stage interrupt
(a) (b)
Stand-alone mode of operation Grid-connected mode of operationTime: 10 µs/div Time: 10 µs/div
Figure 8.15: Measurement results of the timing of the dc-dc stage and dc-ac stageinterrupts.
However, the delay of the sample and hold has to be considered. The requiredphase margin has to be enlarged to cope with this delay [76].
8.8.2 State-of-charge management of the supercapacitor
Thanks to the direct relationship between the voltage and the SOC of the superca-pacitor, the SOC manager can be implemented straightforwardly. Fig. 8.16 showsthe flow chart of the DSP procedure running as a background task. Since the

8.9. System prototyping 225
N > Nset ?
N = N + 1
PFC
decrease
VSC > VSCmax ?
PFC
increase
VSC < VSCmin ?
PFC Max or Min ?
Return
Entrance
Report warning
No
Yes
Yes
Yes
Yes
No
No
No
**
**
**
Figure 8.16: DSP routine for the SOC management of the supercapacitor.
supercapacitor voltage changes very slowly, the procedure runs about once everythree seconds. The supercapacitor voltage is monitored so that it is kept withinthe allowed operating voltage range. As we have discussed, when VSC reaches themaximum or minimum limiting voltage, the fuel cell power is slightly adjusted inorder to charge/discharge the supercapacitor.
Frequent adjustment of the fuel cell power should be avoided in order not todisturb its efficient operation. The history value of VSC is stored and comparedwith the current measurement so that one can determine that the supercapacitor isbeing charged if VSC increased in the last monitoring period and being dischargedif it decreased. Accordingly, the increment/decrement of P ∗∗
FC should be stoppedif VSC indeed rises/drops. The increment/decrement step should be a reasonablevalue that is sufficient for the requested charging/discharging power and is withinthe limiting power of the fuel cell. When P ∗∗
FC reaches either the maximum orminimum, a warning will be issued. The operation of the system will be stoppedif VSC reaches its protecting limits.
8.9 System prototyping
An experimental system rated at 3.5 kW maximum power was constructed. Thecontrol scheme was implemented with the TMS320F2808 DSP from Texas In-struments. The dc-dc stage operates at 100 kHz switching frequency. The high-resolution phase-shift feature of the DSP is used to eliminate limit cycle oscilla-

226 Chapter 8. Line-interactive fuel cell UPS/DG system
PW
M
A/D
Fuel cell side
full-bridge
Control board
eZdsp TMS320F2808
Supercap side
full-bridge
Inverter
Transformer
and
inductorsDc-link side
full-bridge
Control
Power
Fuel cell
Supercap
Local
loadsGrid
Three-port converter
Figure 8.17: Structure of the 3.5 kW prototype. The thick arrows show the power flowlinks and the thin ones show the control links.
tions. A PEM fuel cell was used as the generator, and a supercapacitor as thestorage.
8.9.1 Prototype structure
The structure of the 3.5 kW laboratory prototype is illustrated in Fig. 8.17. Itconsists of the TAB converter, the inverter, the control circuit board, and the DSPboard. The system provides a complete interface between the power inputs (thefuel cell and the supercapacitor) and the outputs (the local loads and the grid).As shown, the three full-bridges are linked through the three-winding transformerand inductors to form the TAB converter. The inverter is connected to the TABconverter at the dc-link capacitor. The thick arrows in Fig. 8.17 show the possibledirections of power flow.
The control board senses all the necessary feedback signals and provides iso-lation for the gate control signals by using high-speed optocouplers. The DSPbased control system samples the operating parameters of both the dc-dc anddc-ac stages and delivers the gating signals to both of them after executing theroutines for the closed-loop regulation.
8.9.2 Multicell paralleling
One challenge in the design of the power stage is that both the fuel cell (54 V) andthe supercapacitor (42 V) have high-current and low-voltage. To deal with thehigh current, as shown in Fig. 8.18, for each port five paralleled full-bridge cellsare connected together at the input point, but the outputs of the bridges are keptseparate. The transformer also has five isolated windings in parallel and each ofthem is connected to one bridge cell. In this way, current is forced to flow througheach cell; thereby, a better distribution of the current over the five paralleled cells

8.9. System prototyping 227
Cell1
Cell5
Fuel cell
(FC)
Cell1
Cell5
Supercap
(SC)
Cell1
Cell5
Dc-link
(DL)
Windings1
Windings5
Figure 8.18: Using separately paralleled cells (5 cells) for high-current applications.
may be achieved. The obvious disadvantage is that the system wiring becomesmore complicated.
8.9.3 System design parameters
Dc-dc stage – the TAB converter
The design of the TAB converter has been detailed in Section 3.6, where a 1 kWprototype switching at 20 kHz was designed. Basically, the design procedureis repeated for the 3.5 kW prototype (switching at 100 kHz). However, boththe power level and switching frequency are increased. This poses more designchallenges. The circuit layout was carefully designed in order to shorten the currentpaths and to reduce resistance and inductance.
The main system parameters are listed in Table 8.1. The control scheme isimplemented according to Fig. 3.8 (on page 78), the same as for the 1 kW TABconverter. Note that the operating voltage range of the supercapacitor (now from27 V to 42 V) is determined by the transformer turns ratio. This corresponds toan operating range of the duty ratio D3 from 0.64 to 1.0. Table 8.2 lists the maincomponents used in the 3.5 kW TAB converter.
The design parameters of the 3.5 kW three-winding transformer and the exter-nal inductors are given in Table 8.3 and Table 8.4, respectively. The layout of thewindings is similar to that of the 1 kW transformer described in Section 3.6.3. Be-cause of the low-voltage inputs and high switching frequency, the required leakageinductances are very small. In such a situation, the inductances of the connectingwires themselves are already significant.
Dc-ac stage – the inverter
The dc-ac stage mainly consists of an inverter stack (SKS40FB2C07V6) describedin Section 7.6 and a few grid-interfacing and feedback sensing components listedin Table 8.5. The STS is made of multiple paralleled triacs in order to increase thetotal current rating. The triac driver uses a small pulse transformer for isolation.The gate control signal of the STS is a series of 10 µs pulses generated by theDSP through one of the I/O pins. The 2 mH filter inductor was manufactured byTrafa B.V. in The Netherlands.

228 Chapter 8. Line-interactive fuel cell UPS/DG system
Table 8.1: System parameters for the dc-dc stage
Description Symbol ValueFuel cell voltage VFC 54 VLoad side dc voltage VDL 400 VSupercapacitor voltage VSC 27 V to 42 VSwitching frequency fs 100 kHzAc load power PDL 3.5 kW maximumFuel cell/battery power PFC 3.5 kW maximumPI controller Gc1(s) K1, τ1 K1 = 5, τ1 = 10 msPI controller Gc2(s) K2, τ2 K2 = 1000, τ2 = 10 msLPF time constant τI 1.0 msModulator gain KM π/500Feedback gain KF1 1/460Feedback gain KF2 1/8415Nominal load resistance RL 45.7 ΩOutput filter capacitor CL 2800 µF
Table 8.2: Main components of the 3.5 kW TAB converter
Component Part number ParametersMOSFET (FC side) FDP3652 100 V, 14 mΩMOSFET (DL side) FCPF20N60 600 V, 0.15 ΩMOSFET (SC side) FDP3652 100 V, 14 mΩElectrolytic cap.(FC side) MCLPR63V109M30X50 10000 µF, 63 VElectrolytic cap.(DL side) EETUQ2W561DA 560 µF, 450 VElectrolytic cap.(SC side) MCLPR63V109M30X50 10000 µF, 63 VFilm cap.(FC side) B32523Q1335K 3.3 µF, 100 VFilm cap.(DL side) B32653A6104J 0.1 µF, 630 VFilm cap.(SC side) B32523Q1335K 3.3 µF, 100 VOptocoupler HCPL-2231-000E delay < 300 nsLinear optocoupler HCNR201-000E nonlinearity 0.01%MOSFET driver IR2110 Max 2 A, 500 VCurrent transducer LA 100-P/SP13 100 A, 0.45%Opamps LF347N high speed, 4-inputHeatsink 890SP-02000-A-100 200 × 200 × 25 mm3
*Note: FC = Fuel Cell, DL = Dc-Link (inverter load), SC = Supercapacitor

8.9. System prototyping 229
Table 8.3: 3.5 kW three-winding transformer design parameters
Description ParametersNominal operating conditions P1 = 3.5 kW, P2 = -3.5 kW, P3 = 0 kWOperating point ϕ12o = 35o, ϕ13o = 17.5o
Operating frequency 100 kHzTransformer turns N1 : N2 : N3 = 2 : 15 : 1Magnetic core shape E65/32/27Core material 3C94Air gap 0.136 mmMax. operating flux density 0.125 TCore loss 100 kW/m3 at 100oC, 100 kHz, 0.125 TCore volume 79000 mm3
Cross section area Ae = 540 mm2
Winding area Aw = 394 mm2
Window area As = 537 mm2
Wire type Litz wire 160*71 µmPrimary winding 25 wires in parallelSecondary winding 5 wires in parallelTertiary winding 25 wires in parallelMagnetizing inductance (primary) LM = 16.5 µH
Table 8.4: Parameters for the leakage and external inductances
L1 L2 L3
Total inductance 0.343 µH 19.3 µH 0.0857 µHCore shape ETD ETD ETDNumber of turns 2 17 1Wire type Litz 160*71 µm Litz 160*71 µm Litz 160*71 µmWires in parallel 25 5 25
Table 8.5: Main components of the grid-interfacing inverter
Component Part number ParametersSEMISTACK SKS40FB2C07V6 Inverter stackOptocoupler HCPL-2231-000E delay < 300 nsCurrent transducer LA 55-P 50 A, 0.65%Triac BTA24-800BW 25 A, 800 V, snubberlessOpamps LF347N high speed, 4-inputFilter capacitor MR5/420B 5 µF, 440 V acFilter inductor Type 261503 2 mH, 25 A rms

230 Chapter 8. Line-interactive fuel cell UPS/DG system
8.9.4 Photographs of the prototype
Photographs of the prototype are displayed in Fig. 8.19. Fig. 8.19(a) shows thefull-bridge circuit with five paralleled modules. The printed circuit board (PCB)uses thick copper layers to reduce the conducting resistance. The TAB converteris shown in Fig. 8.19(b), comprising a three-winding transformer, three inductors,and the three full-bridge circuits shown in Fig. 8.19(a). Because of their size andweight, the transformer and inductors are not mounted on the PCB, but are fixedon the metal box. This also helps remove the heat generated by the transformer.High-frequency litz wires were used to wire the power stage. The completelyassembled system is shown in Fig. 8.19(c), where the TAB converter is on the leftside, the inverter is on the right side, and the control and the DSP board lie onthe top of the metal casing of the TAB converter.
The whole test setup is shown in Fig. 8.20. The fuel cell and the supercapacitorare mounted in the rack shown on the right. The power converters, connectionpanel, displaying meters, and auxiliary dc sources for testing are mounted in thesecond rack on the left.
8.9.5 Hydrogen infrastructure
Installations for hydrogen storage and distribution are shown in Fig. 8.21. Theseinclude a storage cupboard for two cylinders with compressed hydrogen, automaticcylinder change-over equipment, distribution and bleed pipes, gas leak sensors, andalarm systems. The hydrogen gas is standard industrial grade (99.95%).
8.9.6 The DSP board
The DSP control software was developed in the Texas Instruments Code ComposerStudioTM (CCS) environment, which provides assembly language and C high levellanguage debug, and was implemented on an eZdspTM F2808 evaluation boardfrom Spectrum Digital (shown in Fig. 8.22). The eZdspTM F2808 is shipped witha TMS320F2808 DSP, 256 K bits serial I2C EEPROM memory, an onboard IEEE1149.1 JTAG (Joint Test Action Group) controller and a USB JTAG emulationconnector [130]. The TMS320F2808 DSP has 18 K words on-chip zero wait stateSARAM (single-access RAM) and 64 K words on-chip flash memory. The onboardJTAG connector provides an interface to the emulator and debuggers. In addition,analog and I/O connectors are supplied for an easy connection to a target board.
8.9.7 The fuel cell
The fuel cell in the experiment (Model: Independence 1000TM [131], pictured inFig. 8.23) is from Avista Labs (now ReliOn Inc.), and is commercially available.The Independence 1000TM is a modular 1 kW fuel cell for a 48 V system. It isintended to be used as a battery charger. Each 1 kW system can be connected inparallel to up to four other systems for a maximum power output of 5 kW [131].The fuel cell is supplied with standard industrial grade hydrogen gas. The photoof the hydrogen storage and supply system has been shown in Fig. 8.21.

8.9. System prototyping 231
(a)
(b)
(c)
Transformer
Inductors
Full-bridges
Gate drivers
MOSFETs
TAB converter
PWM inverter
Control board
DSP board
Auxiliary power
supply
Heatsink
Figure 8.19: Photographs of the prototype, showing (a) the full-bridge module, (b)the power stage of the 100 kHZ TAB converter, and (c) the completelyassembled power conversion system.

232 Chapter 8. Line-interactive fuel cell UPS/DG system
Supercapacitor
Ac output filter
Connection panel
and meters
TAB converter
PWM inverter
Batteries
Control board
DSP board
Dc supplies for
testing
dSPACE interface
1 kW fuel cells
Local loads
H2 pipe
Gas leak
sensors
Power analyzer
Figure 8.20: Photograph of the test setup in the laboratory.
8.9.8 The supercapacitor
The supercapacitor is commercially available from Maxwell (BoostcapTM Model:BMOD0115AV). Made of 18 cells in series, it has a capacitance of 145 F (±20%),rated voltage of 42 V, and maximum current of 600 A [132]. The ESR of thesupercapacitor is 10 mΩ. Active cell voltage management electronics are integratedin the module, providing charge balancing for each cell. A photograph of thesupercapacitor is shown in Fig. 8.24.
8.10 Experimental results
To increase the total power rating, the 1 kW fuel cell system was connected inparallel with a 55 Ah, 48 V battery bank consisting of four 12 V batteries connectedin series (Model: BE05547, maintenance free calcium, manufactured by DelphiAutomotive Systems, Inc.). A list of the equipment used in the experiment isgiven in Table 8.6.

8.10. Experimental results 233
Storage
cupboard
Gas leak
alarm system
Cylinders
H2 distribution
pipes
Figure 8.21: Photograph of the hydrogen storage and supply infrastructure.
Digital I/O interface Analog interface
2808 DSP
SCI CAN
JTAG interface
USB
controller
interface
Figure 8.22: Photograph of the 2808 eZdsp from Spectrum Digital.
8.10.1 Dc-dc stage operation
Fig. 8.25 (D3 = 1) and Fig. 8.26 (D3 = 0.7) show the measured voltages (v1, v2,and v3) produced by the three full-bridges and the currents (i1, i2, and i3) throughthe transformer windings at the different supercapacitor operating voltages (thusdifferent duty ratios). The results are similar to those in Section 3.7.2. Now, theswitching frequency is higher and more power is transferred. As shown, becauseof soft-switching the waveforms are free of ringing.

234 Chapter 8. Line-interactive fuel cell UPS/DG system
Fuel cell
Cartridge
Figure 8.23: Photograph of the 1 kW fuel cell (Model: Independence 1000TM ) fromAvista Labs (now ReliOn Inc.).
Supercapacitor
Figure 8.24: Photograph of the 145 F, 42 V supercapacitor from Maxwell.
8.10.2 Dc-ac stage operation
The performance of the grid-interfacing inverter has been demonstrated in Sec-tion 7.6. We show here some typical operating waveforms of the inverter. The ex-perimental results for grid-connected mode of operation are shown in Fig. 8.27(a),where a diode rectifier was used as the local load. As shown, the inverter compen-sates for the reactive and harmonic current of the local load and injects in-phasesinusoidal current iG into the grid. With the same load, Fig. 8.27(b) presents themeasurement results of the output voltage vO regulation in stand-alone mode ofoperation. As can be seen, the inverter output voltage vO keeps low distortion.

8.10. Experimental results 235
Table 8.6: Main equipments used in the experiment
Description Manufacturer ModelFuel cell ReliOn (Avista Labs) Independence 1000TM
Supercapacitor Maxwell BMOD0115AVBatteries Delphi Automotive Systems BE05547Dc electronic load Chroma 63202Dc power supply Xantrex XPR100-60Bipolar dc supply Kepco BOP72-6MDc power supply Electronic Measurements TCR500T20-2-101Oscilloscope LeCroy LT264MGrid emulator SpitzenBerger+Spies DM15000/PASCurrent probe Tektronix AM503Power analyzer LEM D6000
(a) (b)
50 V/div
50 V/div Time: 2 µs/div Time: 2 µs/div
400 V/div
v2
v3
v1 i1
40 A/div
i2
4 A/div
i3
100 A/div
Figure 8.25: Measurement results of the 100 kHz TAB converter in Fig. 8.1 at ϕ12 =0.2π, ϕ13 = 0.12π, D3 = 1, showing (a) voltages generated by the full-bridges, and (b) currents through the transformer windings.
8.10.3 Efficiency evaluation
The efficiency of the power stage of the TAB converter was checked and the resultsare shown in Fig. 8.28. A dc electronic load from Chroma (Model: 63202) wasused as the load and a dc power source from Xantre (Model: XPR100-60) as thepower supply. In all the measured operating points, the power flow of the storageport is kept low (close to zero) and the supercapacitor voltage is close to 27 V.
The efficiency was calculated by dividing the total output power by the totalinput power as [57]
η =−PFC − PSC + PLoad + |PFC | + |PSC | + |PLoad|PFC + PSC − PLoad + |PFC | + |PSC | + |PLoad| × 100% . (8.12)
This equation has been proved correct to evaluate the energy efficiency in all the

236 Chapter 8. Line-interactive fuel cell UPS/DG system
(a) (b)
2 s/divTime: 2 µs/div Time: 2 µs/div
50 V/div
50 V/div
v2
v3
v1
400 V/div
i1
40 A/div
i2
4 A/div
i3
100 A/div
Figure 8.26: Measurement results of the 100 kHz TAB converter in Fig. 8.1 at ϕ12 =0.2π, ϕ13 = 0.12π, D3 = 0.7, showing (a) voltages generated by the full-bridges, and (b) currents through the transformer windings.
vO
iG
vG
100 V/div
100 V/div
5 A/div
4 A/divTime:
5 ms/div
100 V/div
2 A/divTime: 5 ms/div
vO
(a) (b)
iL
iL
Figure 8.27: Measurement results of the inverter operation of the circuit in Fig. 8.1,showing: (a) compensation of the harmonics of the local load (a dioderectifier) and injection of active current to the grid in grid-connected modeof operation, and (b) the output voltage and inductor current in stand-alone mode of operation with a diode rectifier load.
operating conditions5.At low power, the efficiency is low. This is mainly due to the switching losses
at very low current, as there are many switching devices in the TAB converter. Inpractice, the efficiency at low power may be improved by equipping the bridgeswith high-power MOSFET modules because the switching loss might be reducedand many interconnection resistances might be lower. It is observed that theefficiency increases significantly as the power increases, reaching a maximum ofnearly 93%. A close observation of the shown efficiency also reveals that at low
5As the sign definitions used throughout the thesis, PFC is the power supplied by the fuel cell,PLoad is the power consumed by the load, and PSC is the power supplied by the supercapacitor.See also Fig. 3.6 on page 74 for the reference directions of the powers.

8.10. Experimental results 237
TAB converter power stage efficiency
under optimal operating conditions
50,0%
55,0%
60,0%
65,0%
70,0%
75,0%
80,0%
85,0%
90,0%
95,0%
100,0%
0 500 1000 1500 2000 2500 3000 3500
Power supplied by the primary source (W)
Eff
icie
ncy
Figure 8.28: Efficiency of the power stage of the TAB converter under optimal operat-ing conditions (with limited accuracy). The shown efficiency is the highestachievable one for the experimental prototype.
power the total loss even decreases when the power increases (from e.g., 1000 Wto 1500 W). The reason may be that at low power the switching loss is high anddominant because the soft-switching is lost at very low current. When the powerincreases, the switching loss reduces, and the rms loss increases. Therefore, itis not impossible that the converter loss may become even lower at increasingcurrents. However, this may also attribute to measurement errors.
The efficiency of the TAB converter was checked by using several multimeters.The power was calculated by multiplying the measured current and voltage. Theefficiency measurement is meant to show the tendency of the converter efficiency.This measurement has a limited accuracy due to the instruments used and readingerrors. An error of 1% to 2% is possible. The listed efficiencies could be over-estimated.
The efficiency shown in Fig. 8.28 is the efficiency of the power stage only,i.e., the three full-bridges and transformer. It does not include the losses in theauxiliary circuits, e.g., the losses of the internal power supply, MOSFET drivers,processor supply, etc. If those extra losses are taken into account, the efficiencywill be lower.
For the three-port system, the definition of efficiency is more complicated. Wehave chosen to measure the case that the (reactive) power supplied by the storageport is almost zero. Under this operating condition, the efficiency of the three-portconverter approaches a two-port one, because the loss of the storage port is low.In practice, if the storage port supplies a considerable amount of (reactive) power,the efficiency will be lower.
The operating voltage of the supercapacitor is close to 27 V. Under this condi-tion, the voltage generated by the supercapacitor bridge v3 is a square-wave. This

238 Chapter 8. Line-interactive fuel cell UPS/DG system
is the optimal operating condition. Therefore, the shown efficiency is the highestachievable one for the experimental prototype.
8.11 Conclusions
A line-interactive fuel cell UPS/DG system has been proposed in this chapter.The power processing unit comprises a three-port converter and a grid-interfacinginverter. The system can flexibly operate in stand-alone or grid-connected mode.In stand-alone mode, the system maintains a regulated output voltage. In grid-connected mode, it injects constant power into the POC, and at the same timecompensates for the reactive and harmonic current produced by local loads. Theprocedures for a seamless transition between the two operating modes have beendiscussed.
A generation system can simultaneously be operated as an active filter to dealwith local harmonic-producing loads. An active filtering function is integrated intothe system and realized solely by the control software. First, the harmonic andreactive current are extracted from the load current by using an active-currentestimator. Based on this, the inverter current reference is calculated. Resonantcurrent controllers with selective harmonic compensation are used to regulate theinverter current, enabling the inverter to inject harmonic-compensating currentinto the POC with low steady-state error and fast transient response.
The benefits of using a supercapacitor have been shown. It compensates forthe instantaneous power fluctuations, overcomes the slow dynamics of the fuelcell, and handles the periodical low-frequency ripple in the power drawn by theinverter. This advantage eliminates otherwise needed energy buffers in the rest ofthe system as long as a sufficient bandwidth is guaranteed.
The digital implementation of the system was presented. It has been shownthat with proper design it is possible to use a single DSP to control and coordi-nate the dc-dc and the dc-ac stage. The requirements for the resolution of thephase shift were explained. High-resolution phase shift was implemented withthe TMS320F2808 DSP, which can achieve a maximum resolution of 150 ps. Inaddition, a simple method for the SOC management of the supercapacitor bymonitoring its terminal voltage was presented.
Finally, the prototyping of the whole system was explained, including a descrip-tion of the main devices used, structure of the prototype, and design parametersof the system. The digitally implemented 3.5 kW fuel cell UPS/DG system wasexperimentally verified. Measurement results of the 3.5 kW TAB converter werepresented, showing the clean waveforms that result from the ZVS design.

Part III
Conclusions
239


Chapter 9
Conclusions andrecommendations
This thesis addresses the power electronic interface for the integration of sustain-able energy sources in small/micro DG systems. Investigated in the previous chap-ters are multiport bidirectional converter topologies, system power flow control,methods to operate the converters with soft-switching, control of grid-interactiveinverters, added functionality of DG systems, as well as utility interconnection,etc. This chapter presents the conclusions that are drawn from this research work.Recommendations for future research are made.
9.1 Conclusions
Three-port bidirectional converters
Alternative electricity generators such as fuel cells have a slow dynamic response.Energy storage is therefore necessary to ensure a proper operation of the primarysource. A three-port energy management system has been presented. With theexternal leveling device the operation of the primary source can be optimized.Three converter topologies, namely, the triple-active-bridge (TAB) converter, theconverter combining dc-link and magnetic-coupling, and the triple-half-bridge con-verter (THB), were presented.
1. Triple-active-bridge topologyThe proposed TAB topology, being an extension of the dual-active-bridge(DAB) topology, comprises three inverter stages that are linked by a three-winding transformer and operated in a high-frequency square-wave mode.The circuit interfaces a primary source and energy storage to a load, andmanages the power flow by phase-shifting the high-frequency voltages. Forthis MIMO control system, two strategies were presented, of which the dual-PI-loop control is less sensitive to propagation delay. The investigation shows
241

242 Chapter 9. Conclusions and recommendations
that unity dc conversion ratio and square-wave mode operation is the optimaloperating condition for the DAB and TAB converter. Based on power flowmodeling and first harmonic model analysis, the small signal average modelsfor both the DAB and TAB converter are derived.
Furthermore, a high-power three-phase TAB converter was proposed. Theconverter consists of three three-phase inverter stages operating in a high-frequency six-step mode. The advantages of the three-phase version com-pared with the single-phase one are the higher current handling capabilityand much lower current ripple at the dc side, resulting in a lower VA ratingof the filter capacitors. The analysis of the topology and design issues of thetransformer for both a conventionally and a coaxially wound structure werepresented.
Neither the DAB nor the TAB converter can operate with soft-switching overthe full operating region when the input voltage varies over a wide range (e.g.,supercapacitors and fuel cells). In addition to the primary power flow controlthat is achieved by phase-shifting the bridges, a simple and effective dutyratio control method was proposed. Essentially, the latter aims to keep thevolt-second product of all transformer windings equal. By adjusting the dutyratio of the voltage presented to the winding inversely proportional to theport dc voltage, ZVS conditions are achievable over the full operating range.The application of this control method in a fuel cell and supercapacitorsystem was analyzed. Duty ratio control is applied to the supercapacitorbridge and, if required, to the fuel cell bridge to handle voltage variationswhile maintaining ZVS. The system was modeled and a DSP-based dual-PI-loop control scheme was implemented. The control scheme manages powerflow and minimizes the mutual influence between the two PI regulators. Ithas been proved that the power flow in the system is controllable with thetwo phase shifts. Practical issues such as the DSP implementation of thecontrol scheme and the design of the transformer and inductors were alsoaddressed. In addition, soft start-up procedures were discussed. The closed-loop simulation and experimental results of a 1 kW prototype validate theeffectiveness of the converter and control strategy.
2. Topology combining dc-link and magnetic-couplingA two-input bidirectional converter topology that combines a dc-link withmagnetic-coupling was proposed. The converter needs only six power switch-ing devices and allows bidirectional power flow for all the power ports.Soft-switching conditions are achievable for the two transformer-linked half-bridges in either direction of power flow. The converter is attractive for, e.g.,fuel cell and supercapacitor applications at a medium- and low-power level.The topology can be replaced by its full-bridge counterpart to reduce thecurrent stress.
A direct fuel cell current-mode control scheme was discussed to managethe power flow. The control objective is to regulate the load voltage andprevent load transitions from affecting the operation of the fuel cell. Sim-ulation and experimental results validated the effectiveness of the proposed

9.1. Conclusions 243
converter topology and power flow management policy. Furthermore, a mul-tiloop control scheme was described. It has three feedback control loops,simultaneously regulating the output voltage, dc-link voltage, and fuel cellpower.
To achieve ZVS and reduce conduction loss, two control methods, variablehysteresis band and asymmetrical wave control, were proposed. The variablehysteresis band control method does not need auxiliary devices. It changesthe band size according to the average value of the supercapacitor current. Inorder to keep the advantages of soft-switching and low conduction loss whenthe fuel cell voltage changes, asymmetrical wave control was introduced.The presented simulation and experiment results verified these two controlmethods.
3. Triple-half-bridge topologyAs an alternative to the above two topologies, a THB topology was pro-posed. The topology comprises a high-frequency three-winding transformerand three half-bridges, one of which is a boost half-bridge interfacing a powerport with a wide operating voltage. The topology is suited for low-currentor low-power applications because the half-bridge capacitors are the limitingfactor.
In addition to the phase shift control, a PWM control method is applied tothe THB converter. The particular structure of the boost half-bridge makesit possible to handle voltage variations at the port by adjusting the dutycycle of all the three half-bridges. With this approach, the operation of theconverter is optimized with both current stress and rms loss being reduced.Moreover, soft-switching conditions for all switches are achievable over theentire phase shift region. However, to maintain soft-switching, this methodonly allows one port voltage to vary because all the three half-bridges have tooperate at the same duty cycle. The efficiency of the converter was checked.The results show a substantial improvement in the efficiency with phase shiftand PWM control when compared with only phase shift control.
A control scheme based on multiple PI regulators manages the power flow,regulates the output, and adjusts the duty cycle in response to the varyingvoltage on the chosen port. Simulation and experimental results were pre-sented, validating the effectiveness of the proposed converter and its controlscheme.
A family of multiport bidirectional dc-dc converters
Attempts were made in this study to explore flexible converter structures for mul-tisource/storage generation systems. A multiport system structure was proposed.Compared with the conventional structure using multiple converters, a multiportconverter promises integrated power conversion by utilizing only a single powerprocessing stage.
Resulting from an extensive topology study, a family of multiport bidirectionaldc-dc converters was presented, based on several basic bidirectional switching cells

244 Chapter 9. Conclusions and recommendations
and a general topology that combines a dc-link with magnetic-coupling. A multi-port bidirectional converter can be constructed from the basic bidirectional switch-ing cells. The presented converter concept provides a method to integrate powersources with widely differing characteristics. Furthermore, based on the interleav-ing technology, solutions for high-power applications were provided. The proposedbasic bidirectional switching cells were extended to polyphase interleaved versions.
The TAB topology was further extended to multi-active-bridge (MAB) topolo-gies. An analysis of the power flow in these MAB converters was presented. Bytransforming the multiwinding transformer to an equivalent cantilever model, thesystem analysis is significantly simplified. Moreover, three operation modes wereanalyzed in terms of current stress and rms loss, and the power flow equationswere derived. A first harmonic approach to simplify the calculation of power flowwas proposed. The full model and the first harmonic model were compared forthe three different operation modes. The first harmonic model shows satisfyingaccuracy in most cases.
Utility interconnection and system control
In this part of the thesis, detailed control methods for operating a small DGsystem in both stand-alone and grid-connected modes were covered. A two-loopcontrol strategy with capacitor current feedback was adopted for stand-alone modecontrol. To achieve zero steady-state error for both the voltage regulation in stand-alone mode and current regulation in grid-connected mode of operation, and toimplement selective harmonic compensation, resonant controllers are used. PRcontrollers have advantages over PI ones when tracking sinusoidal references. Forcontrolling a single-phase inverter, a PR controller can eliminate the steady-stateerror and is more stable than a PI controller.
A high-performance PLL for a single-phase inverter can be realized by means ofa transport delay which generates a virtual quadrature signal, thereby emulatinga balanced three-phase system. Furthermore, an easy-to-implement orthogonalfilter enhances the PLL performance when the grid voltage is distorted. Thefilter is designed in the synchronous reference frame and then transformed to thestationary reference frame. The digital implementation of the filter only needs afew calculations. The effectiveness of the presented control methods was provedby the simulation and experimental results from a laboratory prototype.
At the system level, a line-interactive fuel cell UPS/DG system was proposed,designed and tested. The power processing unit comprises a TAB converter and agrid-interfacing inverter. The system can flexibly operate in stand-alone or grid-connected mode. In stand-alone mode, the system maintains a regulated outputvoltage. In grid-connected mode, it injects constant power into the POC, andat the same time compensates for the reactive and harmonic current producedby local loads. The procedures for detecting the grid status and managing thetransition between the two operating modes were discussed. An automatic andsmooth transition between the two operating modes can be achieved by using astatic transfer switch and ramping up the reference signal in a few consecutivegrid cycles during the transition.

9.2. Recommendations 245
A generation system can simultaneously be operated as an active filter to dealwith local harmonic-producing loads. The active filtering function is integratedinto the system and realized solely by the control software. First, the harmonicand reactive current are extracted from the load current by using an active-currentestimator. Based on this, the inverter current reference is synthesized. Resonantcurrent controllers with selective harmonic compensation are used to regulate theinverter current, enabling the inverter to inject harmonic-compensating currentinto the POC.
The benefits of using a supercapacitor were shown. It compensates for theinstantaneous power fluctuations, overcomes the slow dynamics of the fuel cell, andhandles the periodical low-frequency ripple in the power drawn by the inverter.This advantage eliminates otherwise needed energy buffers in the rest of the systemas long as a sufficient control bandwidth of the TAB converter is guaranteed.
A digital implementation of the system was described. With proper design itis possible to use a single DSP to control and coordinate both the dc-dc and dc-ac stages. The requirements for the resolution of the phase shift were explained.High-resolution phase shift was implemented with the TMS320F2808 DSP, whichcan achieve a maximum resolution of 150 ps. In addition, a simple method for theSOC management of the supercapacitor by monitoring its terminal voltage wasdescribed.
Finally, the prototyping of the whole system was explained, including a descrip-tion of the main devices used, structure of the prototype, and design parametersof the system. The digitally implemented single-phase fuel cell UPS/DG systemwas experimentally verified.
9.2 Recommendations
This thesis contributes to solving energy management issues in small generationsystems by means of multiport bidirectional converters. Based on the results ofthis work recommendations for further research are suggested:
• The proposed three-port topologies have been extended to high-power topolo-gies by using polyphase interleaving. Further research is needed to exploretheir potentials in various applications. For high-power topologies simula-tion results were presented for the three-phase TAB converter. Experimentalwork is recommended in order to evaluate their performance in terms of ef-ficiency, reliability, cost, etc.
• The implementation of the proposed converter concept has been focused onthree-port energy manage systems. Based on the proposed concept, one canextrapolate the approach toward more complex structures. Future researchwork can be carried out, for example, for a four-port energy managementsystem. This can be a combined fuel cell, PV, and supercapacitor system, oran electric car powered by a fuel cell with battery and supercapacitor hybridenergy storage.

246 Chapter 9. Conclusions and recommendations
• Further research in the modeling and control of more complex multiport con-verters (e.g., four-port) is needed in order to design adequate control strate-gies, for example, advanced decoupling schemes, reliable control of MIMOsystems.
• The application of the multiport converters was focused on residential powergeneration systems. Multiport topologies can be used in other similar ap-plications, for instance, electric vehicles. These applications would require anew design and a different energy management scheme.
• The hardware design for the three-port converters can be further optimized.For example, it might be interesting to integrate the external inductors intothe transformer by novel transformer structures, thus reducing the partscount. Efficiency could be improved by optimizing the hardware design andusing advanced thermal management.
• The utility interconnection system was focused on single-phase applications.The present work can be extended to a higher power three-phase system.The integrated active filtering function can be extended to a three-phasesystem. Series compensation in combination with a parallel compensationscheme can be used to fully control the power quality of local loads under allkinds of grid conditions and disturbances while simultaneously conditioningroutine power supplied by renewable sources connected to this system.

Part IV
Appendices
247


Appendix A
Transformer T-model and∆-model conversion
The transformation from the transformer T-model to the ∆-model facilitatessystem analysis. Consider the three-port transformer and inductor network inFig. A.1. The equations for the conversion between the two models have beenpresented in [65]. For convenience, they are listed below.
A.1 T-model to ∆-model conversion
From T-model to ∆-model conversion:
n2 =LM
L1 + LM
m2, (A.1)
n3 =LM
L1 + LM
m3, (A.2)
L12 =
(L1 +
(m2
2
L2+
m23
L3+
1
LM
)−1)(
L2
m22
+
(m2
3
L3+
1
LM
)−1)
×(
m23
L3+
1
LM
)L1 + LM
LM
, (A.3)
L23 =
(L2
m22
+
(1
L1+
m23
L3+
1
LM
)−1)(
L3
m23
+
(1
L1+
1
LM
)−1)
×(
1
L1+
1
LM
)(L1 + LM
LM
)2
, (A.4)
249

250 Appendix A. Transformer T-model and ∆-model conversion
L12
L31 L23v1 v2Lm
v3
L1v2
1:n2
v3
1:n3
L2
L3
LM
v1
(a)
(b)
1:m2
1:m3
Figure A.1: (a) T-model and (b) ∆-model representation of a three-port transformerand inductor network.
L31 =
(L1 +
(m2
2
L2+
m23
L3+
1
LM
)−1)(
L3
m23
+
(m2
2
L2+
1
LM
)−1)
×(
m22
L2+
1
LM
)L1 + LM
LM
, (A.5)
Lm = L1 + LM . (A.6)
A.2 ∆-model to T-model conversion
From ∆-model to T-model conversion:
M1 = Lm, (A.7)
M12 =
(1
Lm
+1
L12+
1
L31 + L23
)−1
, (A.8)
M13 =
(1
Lm
+1
L31+
1
L12 + L23
)−1
, (A.9)
M2 = n22
(Lm +
(1
L12+
1
L31 + L23
)−1)
, (A.10)

A.2. ∆-model to T-model conversion 251
M21 = n22
(1
L12+
1
L31 + L23
)−1
, (A.11)
M23 = n22
⎛⎜⎝ 1
L23+
1
L12 +(
1Lm
+ 1L31
)−1
⎞⎟⎠
−1
, (A.12)
M3 = n23
(Lm +
(1
L31+
1
L12 + L23
)−1)
, (A.13)
M31 = n23
(1
L31+
1
L12 + L23
)−1
, (A.14)
M32 = n23
⎛⎜⎝ 1
L23+
1
L31 +(
1Lm
+ 1L12
)−1
⎞⎟⎠
−1
, (A.15)
∆M12 = M1 − M12, ∆M13 = M1 − M13, (A.16)
LM =
√√√√ ∆M12∆M13
1 − 12
(M32
M3
+ M23
M2
) , (A.17)
L1 = M1 − LM , (A.18)
L2 = M2
(1 − ∆M12
LM
), (A.19)
L3 = M3
(1 − ∆M13
LM
), (A.20)
m2 =
√∆M12M2
LM
, (A.21)
m3 =
√∆M13M3
LM
. (A.22)

252 Appendix A. Transformer T-model and ∆-model conversion

Appendix B
Voltage duty ratio and rms loss
B.1 Rms loss in the DAB converter
For the DAB converter (Fig. 2.2 on page 33), it is possible to choose different dutyratios for the two high-frequency voltages (see Fig. B.1). This section will examinethe influences of the voltage duty ratio on the system rms loss. In order to simplifythe calculation, the analysis is restricted to the fundamental components of thevoltages and current [52].
The fundamental components can be adjusted by the respective duty ratio (D1
and D2) of the voltage (rectangular-pulse-wave as in Fig. B.1) as
Vf1 =4
πV1 cos
((1 − D1)π
2
)and V
′
f2 =4
πnV2 cos
((1 − D2) π
2
), (B.1)
where Vf1 and V′
f2 are the peak values of the fundamental voltages when referredto the primary; D1 and D2 are the duty ratios (D = 1 for square-wave) of theprimary and secondary voltage, respectively. Using the fundamental components,the power flow in the converter can be written as
P =Vf1V
′
f2
2ωLsinϕ. (B.2)
Referring to the phasor diagram in Fig. B.2, the amplitude of the fundamentalcurrent can be calculated through
∥∥If1
∥∥ =
∥∥∥∥V f12
jωL
∥∥∥∥ =1
ωL
∥∥∥V f1 − V′
f2
∥∥∥ =1
ωL
∥∥∥Vf1 − V′
f2(cos ϕ − j sin ϕ)∥∥∥
=1
ωL
√V 2
f1 − 2Vf1V′
f2 cos ϕ + V′2f2.
(B.3)
Then, the rms value is given by
If1 =1√2ωL
√V 2
f1 − 2Vf1V′
f2 cos ϕ + V′ 2f2 . (B.4)
253

254 Appendix B. Voltage duty ratio and rms loss
ϕ
Reference
V1
V2
20.5 Dπ20.5 Dπ
v1
v2
10.5 Dπ10.5 Dπ tω
tω
'
'
2π
Figure B.1: Voltage waveforms of the DAB converter operating in rectangular-pulse-wave mode.
The objective function for the minimization of the rms current is defined as
f(Vf1, V
′
f2, ϕ)
= RI2f1 =
R
2(ωL)2
(V 2
f1 − 2Vf1V′
f2 cos ϕ + V′ 2f2
),
subject to:
0 < Vf1 < Vf1max =4
πV1,
0 < V′
f2 < V′
f2max =4
πnV2,
−π
2< ϕ <
π
2,
P ∗ − Vf1V′
f2
2ωLsin ϕ = 0,
(B.5)
where Vf1max and V′
f2max are the maximum fundamental voltages, and R repre-sents the total equivalent resistance including the transformer winding resistancesand power switches’ conducting resistances. One can minimize the objective func-tion with the optimization toolbox (fmincon) in Matlab to find the minimized rmscurrent. Assuming that Vf1max = V
′
f2max (i.e., V1 = V2/n), the evaluation givesthe result:
Vf1 = Vf1max,
V′
f2 = V′
f2max.(B.6)
This implies that in order to minimize the rms current, the DAB converter shouldbe operated in square-wave mode (D1 = D2 = 1), provided that d = 1 (i.e.,V1 = V2/n).
B.2 Rms loss in the TAB converter
The rms loss analysis for the TAB converter was carried out in a similar way.Fig. B.3 shows the phasor diagram of the TAB converter. For a given set P ∗
1 and

B.2. Rms loss in the TAB converter 255
0
ϕ
If 1
Vf 1
Vf 12
Vf 2'
Figure B.2: Phasor diagram of the DAB converter.
P ∗2 (note P ∗
3 = −P ∗1 − P ∗
2 ), we have⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
P ∗1 = P12 − P31
P ∗2 = P23 − P12
P12 =Vf1V
′
f2
2ωL12sinϕ12
P23 =V
′
f2V′
f3
2ωL23sin(ϕ13 − ϕ12)
P31 = − V′
f3Vf1
2ωL31sinϕ13,
(B.7)
where Vf1, V′
f2, and V′
f3 are the primary-referred peak values of the fundamentalvoltages. A unique solution for P12, P23, P31, ϕ12, and ϕ13 can be found for theabove equations (five variables with five equations).
Referring to the phasor diagram in Fig. B.3, one can solve for the currentphasors:
If12 =V f1 − V
′
f2
jωL12=
1
jωL12
(Vf1 − V
′
f2 cos ϕ12 + jV′
f2 sinϕ12
)=
1
jωL12(A12 + jB12) ,
If23 =V
′
f2 − V′
f3
jωL23
=1
jωL23
(V
′
f2 cos ϕ12 − V′
f3 cos ϕ13 − j(V′
f2 sinϕ12 − V′
f3 sin ϕ13))
=1
jωL23(A23 + jB23) ,
If31 =V
′
f3 − V f1
jωL31=
1
jωL31
(V
′
f3 cos ϕ13 − Vf1 − jV′
f3 sinϕ13
)=
1
jωL31(A31 + jB31) .
(B.8)

256 Appendix B. Voltage duty ratio and rms loss
0
12ϕ13ϕ
If 12
Vf 1
Vf 2'
Vf 3' Vf 31
Vf 12
Vf 23
If 23
If 31
Figure B.3: Phasor diagram of the TAB converter.
Then, the currents at the ports, when referred to the primary, are
If1 = If12 − If31 =1
jω
(A12
L12− A31
L31+ j
(B12
L12− B31
L31
)),
I′
f2 = If23 − If12 =1
jω
(A23
L23− A12
L12+ j
(−B12
L12+
B23
L23
)),
I′
f3 = If31 − If23 =1
jω
(A31
L31− A23
L23+ j
(−B23
L23+
B31
L31
)).
(B.9)
The objective function for minimizing the rms current is defined as
f(Vf1, V
′
f2, V′
f3, ϕ12, ϕ13
)=
1
2
(R1
∥∥If1
∥∥2 + R′
2
∥∥∥I ′
f2
∥∥∥2
+ R′
3
∥∥∥I ′
f3
∥∥∥2)
(B.10)
and the objective function for the minimization of the transformer apparent powercan be written as
f(Vf1, V
′
f2, V′
f3, ϕ12, ϕ13
)=
1
2
(Vf1
∥∥If1
∥∥+ V′
f2
∥∥∥I ′
f2
∥∥∥+ V′
f3
∥∥∥I ′
f3
∥∥∥) , (B.11)

B.2. Rms loss in the TAB converter 257
both with the constraints:
0 < Vf1 < Vf1max =4
πV1,
0 < V′
f2 < V′
f2max =4
πn2V2,
0 < V′
f3 < V′
f3max =4
πn3V3,
−π
2< ϕ12 <
π
2,
−π
2< ϕ13 <
π
2,
P ∗1 − Vf1V
′
f2
2ωL12sin ϕ12 −
V′
f3Vf1
2ωL31sin ϕ13 = 0,
P ∗2 +
Vf1V′
f2
2ωL12sin ϕ12 −
V′
f2V′
f3
2ωL23sin(ϕ13 − ϕ12) = 0.
(B.12)
The objective functions with their constraints can be evaluated with the Matlaboptimization toolbox. Assuming that Vf1max = V
′
f2max = V′
f3max (i.e., V1 =V2/n2 = V3/n3), for both the rms current and transformer apparent power, theresult turns out to be:
Vf1 = Vf1max,
V′
f2 = V′
f2max,
V′
f3 = V′
f3max.
(B.13)
In summary, if the dc voltages at the ports are already equal when referredto the primary, the square-wave mode is the best operating condition from theviewpoint of system rms loss.
Using the above procedure, situations that Vf1max = V′
f2max = V′
f3max (i.e.,V1 = V2/n2 = V3/n3) can also be investigated. An optimal operating point withrespect to system rms loss can be found. However, because the calculation onlyinvolves the fundamental components, results may not be very accurate.

258 Appendix B. Voltage duty ratio and rms loss

Appendix C
Derivation of power flowequations
The operation of the transformer-coupled multi-active-bridge converter can beclassified into three modes. In this appendix the derivation of the power flowequations is presented. The equivalent circuit of a two-port system is shown inFig. C.1.
C.1 Mode I: two square-waves
In this operation mode, both voltages are a square-wave. First, let us define thevoltage base VB as
V1 = VB and V2 = d nVB , (C.1)
where n is the transformer turns ratio and d is the dc conversion ratio (as definedin (2.1) in Section 2.2). Because the waveforms are symmetrical, only half of theswitching cycle is needed for the calculation. As shown in Fig. C.1, the angles atthe switching instants are given by
θ1 = ϕ,
θ2 = π − ϕ.(C.2)
The magnitudes of the current i1 at the commutation instants are
I0 =VB
ωL
(π
2(d − 1) − ϕd
),
I1 =VB
ωL
(π
2(d − 1) + ϕ
),
I2 = −I0.
(C.3)
The average power is calculated by the integral of the instantaneous voltage multi-plied by the instantaneous current with respect to time over one switching period,
259

260 Appendix C. Derivation of power flow equations
π
π
ϕv1
v2
i1
V1
V2
I1
I0
I2
θ1 θ2
ωt
ωt
ωt
'
'
L
v1
i1v2 = v2/n'
Figure C.1: Ideal waveforms when operating in Mode I.
i.e.,
P =1
T
∫ T
0
v(t)i(t)dt. (C.4)
Using the method for calculating the area of a trapezoid, after some manipulationsthe power flow equation in Mode I, for both directions of the power flow, is givenby
P =VB
π
(1
2(I0 + I1) θ1 +
1
2(I1 + I2) θ2
)=
V 2B
ωLϕ
(1 − |ϕ|
π
). (C.5)
C.2 Mode II: square-wave and rectangular-pulse-wave
Mode II is a combination of a square-wave and a rectangular-pulse-wave. Theoperation is subdivided into two modes – inner mode and outer mode.
Inner mode
As discussed in Section 3.2.2, for the inner mode (see Fig. C.2(a)) the phase shiftis in the range
|ϕ| π
2(1 − D2) . (C.6)
Similarly, using the voltage base, we have
V1 = VB and V2 =nVB
D2, (C.7)
where D2 is the duty ratio of the rectangular-pulse-wave v2. As shown in Fig. C.2(a),the angles at the switching instants over a half switching cycle are given by
θ1 = ϕ +π
2(1 − D2) ,
θ2 = D2π,
θ3 = −ϕ +π
2(1 − D2) .
(C.8)

C.2. Mode II: square-wave and rectangular-pulse-wave 261
Note that in this mode there are three switching instants over a half switchingcycle. The magnitudes of the current i1 at the commutation instants are
I0 = 0,
I1 =VB
ωL
(ϕ +
π
2(1 − D2)
),
I2 =VB
ωL
(ϕ − π
2(1 − D2)
),
I3 = −I0 = 0.
(C.9)
Using the same approach in Mode I, the power flow equation for the inner modeof Mode II is calculated as
P =VB
D2π
(1
2(I1 + I2) θ2
)=
V 2B
ωLϕ. (C.10)
For a negative phase shift in the inner mode, this power flow equation also applies.
Outer mode
For the outer mode (see Fig. C.2(b)), the phase shift is in the range
π
2(1 − D2) < |ϕ|
π
2. (C.11)
As shown in Fig. C.2(b), the angles at the switching instants over the half switchingcycle are given by
θ1 = ϕ − π
2(1 − D2) ,
θ2 = (1 − D2) π,
θ3 = −ϕ +π
2(1 + D2) .
(C.12)
The magnitudes of the current i1 at the commutation instants are
I0 = − VB
ωLD2
(ϕ − π
2(1 − D2)
),
I1 =VB
ωL
(ϕ − π
2(1 − D2)
),
I2 =VB
ωL
(ϕ +
π
2(1 − D2)
),
I3 = −I0.
(C.13)
The power flow equation for the outer mode of Mode II is given by
P =VB
π
(1
2(I0 + I1) θ1 +
1
2(I1 + I2) θ2 +
1
2(I2 + I3) θ3
)
=V 2
B
D2ωL
(ϕ(1 − ϕ
π
)− π
4(1 − D2)
2)
.
(C.14)

262 Appendix C. Derivation of power flow equations
ωt
v1
v2
i1
πD2
π V1
V2
I0
θ1 θ2 θ3
I1
I2
I3
ϕ
'
'
ωt
ωt
ωtI0
πD2
π V1
V2
θ1 θ2 θ3
I1
I2I3
ϕv1
v2
i1
'
'
ωt
ωt
(a) Inner mode
(b) Outer mode
Figure C.2: Ideal waveforms when operating in Mode II, showing (a) inner mode and(b) outer mode.
However, the above result is only valid for a positive phase shift. In the caseof a negative shift, the power flow equation can be derived in the same way. It isfound to be
P =V 2
B
D2ωL
(ϕ(1 +
ϕ
π
)− π
4(1 − D2)
2)
. (C.15)
Combining these two equations leads to
P =V 2
B
D2ωL
(ϕ
(1 − |ϕ|
π
)− sign(ϕ)
π
4(1 − D2)
2
), (C.16)
where sign() is a function that returns the sign of the phase shift.
C.3 Mode III: two rectangular-pulse-waves
In Mode III, both voltages are a rectangular-pulse-wave. To derive the power flowequation, the operation is subdivided into three modes – Mode A, B, and C. To

C.3. Mode III: two rectangular-pulse-waves 263
simplify the situation, it is assumed that
D1 > D2 and ϕ > 0. (C.17)
Mode A
Mode A (see Fig. C.3(a)) is similar to the inner mode of Mode II. For Mode A,the phase shift is in the range
|ϕ| π
2|D1 − D2| . (C.18)
In the same way, a voltage base is defined:
V1 =VB
D1and V2 =
nVB
D2, (C.19)
where D1 and D2 are the duty ratios of the rectangular-pulse-waves. As shownin Fig. C.3(a), the angles at the switching instants over a half switching cycle aregiven by
θ1 = ϕ +π
2(D1 − D2) ,
θ2 = πD2,
θ3 = −ϕ +π
2(D1 − D2) ,
θ4 = π (1 − D1) .
(C.20)
There are four switching instants within a half cycle. The magnitudes of thecurrent i1 at the commutation instants are
I0 = 0,
I1 =VB
ωLD1
(ϕ +
π
2(D1 − D2)
),
I2 = − VB
ωLD1
(−ϕ +
π
2(D1 − D2)
),
I3 = 0,
I4 = 0.
(C.21)
Then, the power flow equation for Mode A of Mode III is given by
P =VB
πD2
(1
2(I1 + I2) θ2
)=
V 2B
ωLD1ϕ. (C.22)
Mode B
Mode B (see Fig. C.3(b)) is similar to the outer mode of Mode II. For Mode B,the phase shift is in the range
π
2|D1 − D2| < |ϕ|
π
2(2 − D1 − D2) . (C.23)

264 Appendix C. Derivation of power flow equations
ωt
v1
v2
i1
πD2V2
I0
θ1 θ2 θ4
I1
I2
I3
ϕ
πD1V1
θ3
π
I4
ωt
ωt
'
'
ωt
πD2V2
I0
θ1 θ2 θ4
I1 I2
ϕ
V1
θ3
π
πD1
I3 I4
v1
v2
i1
'
'
ωt
ωt
ωt
πD2V2
I0
θ1 θ2 θ4
I1
I2
ϕ
V1
θ3
π
πD1
I3
I4
v1
v2
i1
'
ωt
ωt
'
(a) Mode A
(b) Mode B
(c) Mode C
Figure C.3: Ideal waveforms when operating in Mode III, showing (a) Mode A, (b)Mode B, and (c) Mode C.

C.3. Mode III: two rectangular-pulse-waves 265
As shown in Fig. C.3(b), the angles at the switching instants over a half switchingcycle are given by
θ1 = ϕ +π
2(D1 − D2) ,
θ2 = −ϕ +π
2(D1 + D2) ,
θ3 = ϕ − π
2(D1 − D2) ,
θ4 = −ϕ +π
2(2 − D1 − D2) .
(C.24)
The magnitudes of the current i1 at the commutation instants are
I0 = 0,
I1 =VB
ωLD1
(ϕ +
π
2(D1 − D2)
),
I2 =VB
ωLD2
(ϕ − π
2(D1 − D2)
),
I3 = 0,
I4 = 0.
(C.25)
The power flow equation for Mode B of Mode III is given by
P =VB
πD1
(1
2(I0 + I1) θ1 +
1
2(I1 + I2) θ2
)
=V 2
B
2ωLD1
(π
2(D1 − D2) + ϕ +
1
D2
((−π
4
) (D2
1 − D22
)+ D1ϕ − ϕ2
π
)).
(C.26)
Mode C
If the phase shift further increases, Mode C occurs (see Fig. C.3(c)). The differencebetween Mode B and Mode C is that in Mode B there is a short period duringwhich the current i1 remains zero. For Mode C, the phase shift is in the range
π
2(2 − D1 − D2) < |ϕ|
π
2. (C.27)
As shown in Fig. C.3(c), the angles at the switching instants over a half switchingcycle are given by
θ1 = ϕ − π
2(2 − D1 − D2) ,
θ2 = π (1 − D2) ,
θ3 = −ϕ +π
2(D1 + D2) ,
θ4 = π (1 − D1) .
(C.28)

266 Appendix C. Derivation of power flow equations
The magnitudes of the current i1 at the commutation instants are
I0 =VB
ωLD2
(−ϕ +
π
2(2 − D1 − D2)
),
I1 =VB
ωLD1
(ϕ − π
2(2 − D1 − D2)
),
I2 =VB
ωLD1
(ϕ +
π
2(D1 − D2)
),
I3 =VB
ωLD2
(ϕ − π
2(D1 − D2)
),
I4 = −I0.
(C.29)
The power flow equation for Mode C of Mode III is given by
P =VB
πD1
(1
2(I0 + I1) θ1 +
1
2(I1 + I2) θ2 +
1
2(I2 + I3) θ3
)
=V 2
B
ωLD1D2
(ϕ(1 − ϕ
π
)− π
4(1 − D1)
2 − π
4(1 − D2)
2)
.
(C.30)
So far, the calculation assumes that D1 is greater than D2 and the phase shiftis positive. In the situations that D2 is greater than D1 or a negative phase shift,a similar procedure can be used to derive the power flow equations. Consideringall the possibilities, it can be derived that
for Mode A
P =V 2
B
ωL· ϕ
max(D1, D2), (C.31)
for Mode B
P =V 2
B
2ωLD1
⎛⎜⎝
sign(ϕ)π
2(D1 − D2) + ϕ
+1
D2
(sign(ϕ)
(−π
4
) (D2
1 − D22
)+ D1ϕ − sign(ϕ)
ϕ2
π
)⎞⎟⎠ ,
(C.32)and for Mode C
P =V 2
B
ωLD1D2
(ϕ
(1 − |ϕ|
π
)− sign(ϕ)
π
4(1 − D1)
2 − sign(ϕ)π
4(1 − D2)
2
).
(C.33)

Appendix D
Laplace transformation in arotating reference frame
Consider a system (Fig. D.1) in the stationary reference frame
y s(t) = h s(t) ∗ x s(t), (D.1)
where ∗ is the convolution operation; the superscript “s” indicates that the equa-tion is expressed in the stationary reference frame; x s(t) is the input; y s(t) is the
output; h s(t) is the system impulse response expressed in the stationary referenceframe. Note that both the input and output are space vectors (complex variables)and thus the transfer function is a vector function.
For a space vector, rotating the reference frame can be interpreted as changingthe vector frequency. As illustrated in Fig. D.1, the relationship of the input andthe output quantities between the stationary and a rotating reference frame (at arotating speed of ω) can be expressed by [107]
x r(t) = x s(t) e−jωt, (D.2)
y r(t) = y s(t) e−jωt. (D.3)
Shifting the system from the stationary to the rotating reference frame can bedone by multiplying (D.1) by e−jωt. This yields
y s(t) e−jωt = [h s(t) ∗ x s(t)] e−jωt. (D.4)
267

268 Appendix D. Laplace transformation in a rotating reference frame
According to the definition of convolution, we have
[h s(t) ∗ x s(t)] e−jωt =
[∫ t
0
h s(τ) x s(t − τ) dτ
]e−jωt
=
∫ t
0
h s(τ) x s(t − τ) e−jωtdτ
=
∫ t
0
[h s(τ) e−jωτ ][x s(t − τ) e−jω(t−τ)] dτ
= [h s(t) e−jωt] ∗ [x s(t) e−jωt]. (D.5)
So, (D.4) can be rearranged as[y s(t) e−jωt
]= [h s(t) e−jωt] ∗ [x s(t) e−jωt
]. (D.6)
Now, let us transfer these equations from the time domain to the frequencydomain. First, (D.1) can be shifted into the frequency domain by taking theLaplace transform of each term, i.e.,
Y s(s) = Hs(s) Xs(s), (D.7)
where
Y s(s) = L [y s(t)] , (D.8)
Hs(s) = L[h s(t)
], (D.9)
Xs(s) = L [x s(t)] , (D.10)
where L[ ] stands for Laplace transformation.Next, we apply Laplace transformation to (D.6). We have
L [y s(t) e−jωt]
=
∫ +∞
−∞
[y s(t) e−jωt
]e−stdt
=
∫ +∞
−∞
y s(t) e−(s+jω)tdt
= Y s(s + jω). (D.11)
The same goes for x s(t) e−jωt and h s(t) e−jωt:
L [x s(t) e−jωt]
= Xs(s + jω), (D.12)
L[h s(t) e−jωt
]= Hs(s + jω). (D.13)
Recognizing that convolution in the time domain corresponds to multiplication inthe frequency domain, we can write (D.6) in the frequency domain as
Y s(s + jω) = Hs(s + jω) Xs(s + jω), (D.14)

269
Time domain Frequency domain
d
q
Input Output
( ) ( ) * ( )s s sy t h t x t=r
r r
( ) ( ) ( )s s sY s H s X s= ⋅r r r
Stationary reference frame
Rotating reference frame
d
q
( ) ( )r s j tx t x t e ω−= ⋅r r
( ) ( )r s j ty t y t e ω−= ⋅r r
α
β
α
β
ω ω
Time domain Frequency domain
( ) ( ) * ( )r r ry t h t x t=r
r r
( ) ( ) ( )r r rY s H s X s= ⋅r r r
Input Output
(a)
(b)
( )sy tr
( )sx tr
( )sh tr
( )sH tr
( )sh tr
( )sx tr
( )sy tr
( )sY tr
( )sX tr
( )rH tr
( )rh tr
( )rx tr
( )ry tr
( )rY tr
( )rX tr
( )rx tr
( )ry tr
( )rh tr
Figure D.1: Laplace transformation and system in (a) the stationary reference frameand (b) the rotating reference frame. Note that both the input and outputare complex variables (space vectors) and thus the transfer function is avector function.

270 Appendix D. Laplace transformation in a rotating reference frame
Table D.1: Relationship between the two reference frames
Time domain Frequency domain
x r(t) = x s(t) e−jωt Xr(s) = Xs(s + jω)
y r(t) = y s(t) e−jωt Y r(s) = Y s(s + jω)
h r(t) = h s(t) e−jωt Hr(s) = Hs(s + jω)
x s(t) = x r(t) ejωt Xs(s) = Xr(s − jω)
y s(t) = y r(t) ejωt Y s(s) = Y r(s − jω)
h s(t) = h r(t) ejωt Hs(s) = Hr(s − jω)
which corresponds toY r(s) = Hr(s) Xr(s), (D.15)
where Y r(s), Hr(s), and Xr(s) are the Laplace transformation of y r(t), h r(t),and x r(t), respectively. A comparison of the above two equations, (D.14) and(D.15), gives the system transfer function in the rotating reference frame:
Hr(s) = Hs(s + jω). (D.16)
From the above analysis it can be concluded that rotating the reference frameat a speed of ω can simply be accounted for by substituting s+ jω for the Laplacevariable s in the Laplace-domain transfer function. For a space vector, the physicalmeaning lies in the fact that rotating the reference frame effectively changes therotating speed of the vector.
Similarly, it can be inferred from (D.16) that the stationary reference frameequivalent of a transfer function in the rotating reference frame can be obtainedby
Hs(s) = Hr(s − jω). (D.17)
When transferred to the time domain, this can be expressed as
h s(t) = L−1[Hs(s)
]= h r(t) ejωt. (D.18)
Equation (D.16) and (D.17) provide a convenient way for transforming a systemtransfer function between the stationary and a rotating reference frame. Table D.1summarizes equations for transforming between the two reference frames.

Appendix E
List of symbols
Symbol Unit Descriptions
α rad phase shift angleβ rad phase shift angleγ — power factor (or transformer utilization factor)η — efficiencyθ rad angleτ s time constant of a PI controllerτ1 s time constant of the PI controller of the fuel cell power
control loopτ2 s time constant of the PI controller of the output voltage
control loopτI s time constant of a LPFϕ rad phase shift between two portsϕ12 rad phase shift between port 1 and port 2ϕ13 rad phase shift between port 1 and port 3ϕ23 rad phase shift between port 2 and port 3ϕ31 rad phase shift between port 3 and port 1ϕB rad boundary of the phase shift between the inner and the outer
modeϕij rad phase shift between port i and port jϕmax rad maximum phase shiftω rad/s angular frequencyω rad/s angular rotating speed of a reference frameω1 rad/s angular frequency of the fundamental component of the grid
voltageω1 rad/s angular rotating speed of the synchronous reference frameωb1 rad/s integrator low-frequency cutoff of a resonant controller for
the 1st harmonic
271

272 Appendix E. List of symbols
ωbh rad/s integrator low-frequency cutoff of a resonant controller forthe hth harmonic
ωc rad/s integrator low-frequency cutoff of a PR controllerωff rad/s frequency feedforward termωp rad/s pole frequency of an orthogonal filter (LPF in the synchro-
nous reference frame)
A V activation overpotential of a fuel cellAe mm2 cross section area of a transformerAw mm2 winding area of a transformerAs mm2 window area of a transformerB V concentration polarization constant of a fuel cellCDL F dc-link filter capacitanceCf F ac output filter capacitanceCL F dc output filter capacitanceCSC F capacitance of a supercapacitord — dc conversion ratioD — duty cycleD — decoupling matrixD1 — duty ratio of the primary side rectangular-pulse-waveD2 — duty ratio of the secondary side rectangular-pulse-waveD3 — duty ratio of the tertiary side rectangular-pulse-waveDFC — duty cycle of the fuel cell side half-bridge of the two-input
converter in Chapter 4Dmax — maximum duty cycleDmin — minimum duty cycleDN — duty ratio of the rectangular-pulse-wave of port NDSC — duty cycle of the supercapacitor side half-bridge of the two-
input converterEFC V nonlinear voltage source of the dynamic fuel cell modelErev V reversible cell voltage of a fuel cellESC J energy stored in a supercapacitorErrR — relative errorfO Hz inverter ac output frequencyfs Hz switching frequencyGo — open-loop gain of the DAB converterGo — open-loop gain matrix of the TAB converterGV ϕ12
— open-loop gain of the output voltage control loopGV ϕ13
— open-loop gain of the fuel cell power control loopH — power flow matrixi1 A current through the primary windingi12 A current through L12
i2 A current through the secondary windingi23 A current through L23
i3 A current through the tertiary winding

273
i31 A current through L31
iBT A current supplied by the batteryiD A dc component of a line currentiDL A current drawn by the inverter at the dc-linkiF A reactive and harmonic currentsiFC A current supplied by the fuel celliG A current injected into the gridiH A harmonic currents of a line currentiL A current through the ac filter inductoriLD A current of local ac loadsiLoad A current flow to the dc loadiO A inverter output currentiP A in-phase component of a line currentiP1 A current drawn from the source portiP2 A current drawn from the load portiP3 A current drawn from the storage porti∗PFC A in-phase current reference proportional to P ∗∗
FC
iQ A reactive component of a line currenti∗Q A desired reactive current to be injected to the grid
i∗QC A reference for the capacitive current compensating for iCiS3 A current through the power switch S3
iS4 A current through the power switch S4
iS5 A current through the power switch S5
iS6 A current through the power switch S6
iSC A current supplied by the supercapacitorI0 A exchange current of a fuel cellIavg A average currentIB A current base for a per unit (p.u.) representationIW A band size of a hysteresis bandIBT A average battery discharging currentIFC A average fuel cell currentI∗FC A fuel cell current referenceI∗HI A upper boundary of a hysteresis bandIl A limiting current of a fuel cellI∗LO A lower boundary of a hysteresis bandIP1 A average current drawn from the source portIP2 A average current drawn from the load portIP3 A average current drawn from the storage portISC A average supercapacitor discharging currentI∗SC A supercapacitor current referenceIpeak A peak currentIrms A rms current
IP A peak value of an in-phase current
I∗PFC A peak value of i∗PFC
I∗Q A peak value of i∗Q

274 Appendix E. List of symbols
∆IFC A magnitude of the ripple current in iFC in the two-inputconverter
∆ISC A magnitude of the ripple current in iSC in the two-inputconverter
K — proportional gainK1 — proportional gain of the PI controller of the fuel cell power
control loopK2 — proportional gain of the PI controller of the output voltage
control loopKFI — current feedback gainKF1 — feedback gain of the fuel cell power control loopKF2 — feedback gain of the output voltage control loopKFV — voltage feedback gainKI — integral gain of a PR controllerKI1 — integral gain of a resonant controller for the 1st harmonicKIh — integral gain of a resonant controller for the hth harmonicKM — phase shift modulator gainKP — proportional gain of a PR controllerKPWM — gain of the PWM inverterL H primary-referred total leakage (and external) inductanceL1 H primary side leakage (and external) inductanceL12 H inductance between port 1 and port 2 in the ∆-modelL12A H inductance between port 1 and port 2 of phase A in the
∆-modelL1A H primary side leakage (and external) inductance of phase AL2 H secondary side leakage (and external) inductanceL23 H inductance between port 2 and port 3 in the ∆-modelL23A H inductance between port 2 and port 3 of phase A in the
∆-modelL2A H secondary side leakage (and external) inductance of phase AL3 H tertiary side leakage (and external) inductanceL31 H inductance between port 3 and port 1 in the ∆-modelL31A H inductance between port 3 and port 1 of phase A in the
∆-modelL3A H tertiary side leakage (and external) inductance of phase ALB H inductance base for a per unit (p.u.) representationLf H output ac filter inductanceLFC H inductance of the inductor connected to the fuel cell in the
two-input converterLm H magnetizing inductance in the ∆-modelLmA H magnetizing inductance of phase A in the ∆-modelLM H magnetizing inductance in the T-modelLMA H magnetizing inductance of phase A in the T-modelLN H leakage (and external) inductance of port NLSC H inductance of the inductor connected to the supercapacitor
in the two-input converter

275
m2 — turns ratio between the primary and secondary in the T-model
m3 — turns ratio between the primary and tertiary in the T-modelM — degrees of freedom in controln — transformer turns ration2 — turns ratio between the primary and secondary in the ∆-
modeln3 — turns ratio between the primary and tertiary in the ∆-
modelN — number of portsN1 — number of turns of the primary windingN2 — number of turns of the secondary windingN3 — number of turns of the tertiary windingNN — number of turns of the port N windingNDPHS bits resolution of the DPHSNDPWM bits resolution of the DPWMP W active powerP — port power flow vectorP ∗ W desired power flowP1 W power flow from port 1 (the source port)P12 W power flow through inductor L12
P12A W power flow through inductor L12A
P1A W power flow from port 1 (the source port) through phase AP2 W power flow from port 2 (the load port)P23 W power flow through inductor L23
P23A W power flow through inductor L23A
P2A W power flow from port 2 (the load port) through phase AP3 W power flow from port 3 (the storage port)P31 W power flow through inductor L31
P31A W power flow through inductor L31A
P3A W power flow from port 3 (the storage port) through phase APB W power base for a per unit (p.u.) representationPBT W power supplied by the batteryPDL W power consumed by the inverter at the dc-linkPFC W power delivered by the fuel cellP ∗
FC W desired fuel cell powerP ∗∗
FC W fuel cell power reference issued by the SOC managerPFull W power flow calculated by the full modelPFund W power flow calculated by the first harmonic modelPG W power flow from the grid to the POCPij W power flow through inductor Lij
PLoad W power consumed by the loadPLoss W total power loss in the systemPO W ac output powerPSC W power supplied by the supercapacitorQ VAR reactive power

276 Appendix E. List of symbols
Q∗ VAR desired reactive power to be injected into the gridQ — vector of internal power flow in the ∆-modelRint Ω fuel cell internal resistanceRL Ω dc load resistanceS VA total apparent powerT s switching periodT1 s period of the fundamental component of the grid voltageTPWM s PWM periodTS s sampling periodTSYSCLK s timer (CPU) clock periodu — control vectorvα V α-axis component of a voltage space vectorvβ V β-axis component of a voltage space vectorv1 V voltage generated by the primary side bridgev2 V voltage generated by the secondary side bridgev3 V voltage generated by the tertiary side bridgevG V grid voltagevinv V PWM inverter bridge output voltagevLD V local ac load voltagevO V inverter output voltagevPG1 V neutral (P) to ground (G1) voltage of the three-phase TAB
convertervS2 V voltage across the switch S2
V1 V dc voltage of port 1 (the source port)V1min V minimum operating voltage of port 1V2 V dc voltage of port 2 (the load port)V2min V minimum operating voltage of port 2V3 V dc voltage of port 3 (the storage port)V3min V minimum operating voltage of port 3VB V voltage base for a per unit (p.u.) representationVd V dc voltage across the half-bridge in the THB converterVD V d-axis component of a voltage space vectorVDC V low-voltage side dc-link voltage of the two-input converterVDL V dc-link voltageVFC V dc voltage of the fuel cellVFCmin V minimum operating voltage of the fuel cellVin V converter input voltageVLoad V dc voltage of the loadVN V dc voltage of port NVNmin V minimum operating voltage of port NVo V converter output voltageVSC V dc voltage of the supercapacitorVSCmin V minimum operating voltage of the supercapacitor
Vf1 V peak value of the first harmonic component of v1
Vf1max V maximum of Vf1
Vf2 V peak value of the first harmonic component of v2

277
Vf2max V maximum of Vf2
Vf3 V peak value of the first harmonic component of v3
Vf3max V maximum of Vf3
VG V peak value of the fundamental component of the grid volt-age
w — independent port vectorx — vector of state variablesxinst — instantaneous state variablesy — dependent port vectorZl Ω grid impedanceZLD Ω local ac load impedance
Notation
x(t) — time-dependent signalX(s) — frequency-dependent signal (Laplace domain)
X — peak value
X — small signal perturbationX — phasorX — space vector
Superscript
′
— primary-referred value∗ — desired value (reference value)e — in the synchronous framer — in a rotating frames — in the stationary frame
Subscript
1 — first harmonic
1 — port 1
12 — between port 1 and port 2
2 — port 2
23 — between port 2 and port 3
3 — port 3
31 — between port 3 and port 1
A — phase A
B — phase B
B — base value
BT — battery
C — phase C
DL — dc-link (of the inverter)
f — fundamental component

278 Appendix E. List of symbols
FC — fuel cell
G — grid
h — hth harmonic
LD — ac load
Load — dc load
min — minimum value
max — maximum value
o — operating point
ON — ON-time conducting current
SC — supercapacitor
turnoff — switch current at the instance of switching off

Appendix F
List of acronyms
ADC analog-to-digital converterADRP auxiliary diode resonant poleAPF active power filterARCP auxiliary resonant commutated poleBE both edgesBPF band-pass filterCCS Code Composer StudioCHP combined heat and powerDAB dual-active-bridgeDCM discontinuous conducting modeDG distributed generationDHB dual-half-bridgeDL dc-linkDPHS digital phase shiftDPWM digital pulse-width modulatorDSP digital signal processorePWM enhanced PWMEEPROM electrically erasable programmable read-only memoryEMI electro-magnetic interferenceESR equivalent series resistanceEV event managerFB full-bridgeFC fuel cellFE falling edgeFFT Fast Fourier TransformFPGA field-programmable gate arrayGC grid-connectedGTO gate turn-off thyristorHB half-bridgeHF high-frequency
279

280 Appendix F. List of acronyms
HV high-voltageHRPWM high-resolution PWMHRPHS high-resolution phase shiftHS hard-switchingIGBT insulated gate bipolar transistorJTAG joint test action groupLCO limit cycle oscillationsLF low-frequencyLPF low-pass filterLSB least significant bitLV low-voltageMAB multi-active-bridgeMEP micro edge positionerMI multiple-inputMIBB multiple-input buck-boostMIMO multiple-input multiple-outputMIPS million instructions per secondMO multiple-outputMOSFET metallic oxide semiconductor field effect transistorPCB printed circuit boardPEM polymer electrolyte membrane or proton exchange membranePI proportional-integralPID proportional-integral-derivativePHS phase-shiftedPLL phase locked loopPOC point of connectionPV photovoltaicPWM pulse-width modulationrms root-mean-squareRE rising edgeSA stand-aloneSARAM single-access RAMSC supercapacitorSMES superconducting magnetic energy storageSOC state-of-chargeSS soft-switchingSTS static transfer switchTAB triple-active-bridgeTHB triple-half-bridgeTHD total harmonic distortionUPQC unified power quality conditionerUPS uninterruptible power supplyVSI voltage source inverterZCS zero-current switchingZVS zero-voltage switchingZVT zero-voltage transition

Appendix G
List of publications
As the first author in the following publications resulting from this work. Thefollowing publications are related to this PhD thesis.
Patent
1. H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “Method foroperating a power converter in a soft switching range,” International Patentnumber: WO/2006/131870, Filed: Jun. 02, 2005, International filing date:Jun. 02, 2006, Publication date: Dec. 14, 2006.
IEE/IEEE journal papers
2. H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “Family ofmultiport bidirectional DC-DC converters,” IEE Proceeding Electric PowerApplications, vol. 153, no. 3, pp. 451–458, May 2006.
3. H. Tao, J. L. Duarte, and M. A. M. Hendrix, “Three-port triple-half-bridgebidirectional converter with zero-voltage switching,” IEEE Trans. PowerElectron., accepted with minor review in Jul. 2007, revision accepted onAug. 25, 2007, final manuscript submitted, to be published in 2008.
4. H. Tao, J. L. Duarte, and M. A. M. Hendrix, “Line-interactive UPS usinga fuel cell as the primary source,” IEEE Trans. Ind. Electron., acceptedwith minor review in Jul. 2007, revision accepted on Sep. 13, 2007, finalmanuscript submitted, to be published in 2008.
5. H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “Transformer-coupled multiport ZVS bidirectional DC-DC converter with wide input range,”IEEE Trans. Power Electron., revision accepted on Oct. 8, 2007, final man-uscript submitted, to be published in 2008.
281

282 Appendix G. List of publications
IEEE conference papers
6. H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “A soft-switched three-port bidirectional converter for fuel cell and supercapaci-tor applications,” in Proc. IEEE Power Electronics Specialists Conference(PESC’05), Recife, Brazil, Jun. 2005, pp. 2487–2493.
7. H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “Design ofa soft-switched three-port converter with DSP control for power flow man-agement in hybrid fuel cell systems,” in Proc. 11th European Conferenceon Power Electronics and Applications (EPE’05), Dresden, Germany, Sep.2005, pp. 1–10.
8. H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “Multi-inputbidirectional DC-DC converter combining DC-link and magnetic-coupling forfuel cell systems,” in Proc. IEEE Industry Application Society Conferenceand Annual Meeting (IAS’05), Hong Kong,China, Oct. 2005, pp. 2021–2028.
9. H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “Triple-half-bridge bidirectional converter controlled by phase shift and PWM,” in Proc.IEEE Applied Power Electronics Conference and Exposition (APEC’06),Dallas, TX, Mar. 2006, pp. 1256–1262.
10. H. Tao, J. L. Duarte, and M. A. M. Hendrix, “Variable hysteresis bandand asymmetrical wave control of a low cost two-input converter with zero-voltage switching,” in Proc. IEEE Young Researcher Symposium IAS/PELS/PES Benelux Chapter (YRS’06), Ghent, Belgium, Apr. 2006, pp. 1–8.
11. H. Tao, J. L. Duarte, and M. A. M. Hendrix, “A distributed fuel cell basedgeneration and compensation system to improve power quality,” in Proc.IEEE International Power Electronics and Motion Control Conference (IPEMC’06), Shanghai, China, Aug. 2006, pp. 1–5.
12. H. Tao, J. L. Duarte, and M. A. M. Hendrix, “Novel zero-voltage switchingcontrol methods for a multiple-input converter interfacing a fuel cell andsupercapacitor,” in Proc. IEEE The 32nd Annual Conference of the IEEEIndustrial Electronics Society (IECON’06), Paris, France, Nov. 2006, pp.2341–2346.
13. H. Tao, J. L. Duarte, and M. A. M. Hendrix, “High-resolution phase shiftand digital implementation of a fuel cell powered UPS system,” in Proc.12th European Conference on Power Electronics and Applications (EPE’07),Aalborg, Denmark, Sep. 2007, pp. 1–10.
14. H. Tao, J. L. Duarte, and M. A. M. Hendrix, “High-power three-port three-phase bidirectional DC-DC converter,” in Proc. IEEE Industry ApplicationSociety Conference and Annual Meeting (IAS’07), New Orleans, USA, Sep.2007, pp. 2022–2029.

283
15. H. Tao, J. L. Duarte, and M. A. M. Hendrix, “Control of grid-connectedinverters as used in small distributed generators,” in Proc. IEEE IndustryApplication Society Conference and Annual Meeting (IAS’07), New Orleans,USA, Sep. 2007, pp. 1574–1581.

284 Appendix G. List of publications

Bibliography
[1] Wikipedia. Global warming. [Online]. Available: http://en.wikipedia.org/wiki/Global warming
[2] R. Messenger and J. Ventre, Photovoltaic Systems Engineering. London,UK: CRC Press, 2004.
[3] Wikipedia. Wind power. [Online]. Available: http://en.wikipedia.org/wiki/Wind power
[4] Wikipedia. Micro combined heat and power. [Online]. Available: http://en.wikipedia.org/wiki/MicroCHP
[5] P. Bartholomeus and H. Overdiep. Route: Energy efficiency and green gas– MicroCHP project in the Netherlands. Presentation. [Online]. Available:www.netherlands-embassy.org/files/pdf/2.pdf
[6] J. Larminie and A. Dicks, Fuel Cell Systems Explained. Chichester, Eng-land: John Wiley & Sons, 2000.
[7] M. Tanrioven and M. S. Alam, “Modeling, control and power quality evalu-ation of a PEM fuel cell based power supply system for residential use,” inProc. The 39th IEEE Industry Application Society Conference and AnnualMeeting (IAS’04), Seatle, USA, Oct. 2004, pp. 2808–2814.
[8] E. Santi, D. Franzoni, A. Monti, D. Patterson, F. Ponci, and N. Barry,“A fuel cell based domestic uninterruptible power supply,” in Proc. IEEEApplied Power Electronics Conference and Exposition (APEC’02), Dallas,TX, USA, Mar. 2002, pp. 605–613.
[9] D. Franzoni, E. Santi, A. Monti, F. Ponci, D. Patterson, and N. Barry,“An active filter for fuel cell applications,” in Proc. IEEE Power ElectronicsSpecialists Conference (PESC’05), Recife, Brazil, Jun. 2005, pp. 1607–1613.
[10] F. Z. Peng, H. Li, G.-J. Su, and J. Lawler, “A new ZVS bidirectional DC-DC converter for fuel cell and battery application,” IEEE Trans. PowerElectron., vol. 19, no. 1, pp. 54–65, Jan. 2004.
285

286 BIBLIOGRAPHY
[11] F. Blaabjerg, Z. Chen, and S. Kjaer, “Power electronics as efficient inter-face in dispersed power generation systems,” IEEE Trans. Power Electron.,vol. 19, no. 5, pp. 1184–1194, Sep. 2004.
[12] A. D. Napoli, F. Crescimbini, S. Rodo, and L. Solero, “Multiple input DC-DC power converter for fuel-cell powered hybrid vehicles,” in Proc. IEEE33rd Power Electronics Specialists Conference (PESC’02), Cairns, Jun. 2002,pp. 1685–1690.
[13] L. Solero, A. Lidozzi, and J. A. Pomilio, “Design of multiple-input powerconverter for hybrid vehicles,” in Proc. IEEE Applied Power ElectronicsConference and Exposition (APEC’04), Anaheim, California, Feb. 2004, pp.1145–1151.
[14] C. Liu, T. Nergaard, L. Leslie, J. Ferrell, X. Huang, T. Shearer, J. Reichl,J. Lai, and J. Bates, “Power balance control and voltage conditioning for fuelcell converter with multiple sources,” in Proc. IEEE 33rd Power ElectronicsSpecialists Conference (PESC’02), Cairns, Jun. 2002, pp. 2001–2006.
[15] A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “A converter to in-terface ultra-capacitor energy storage to a fuel cell system,” in Proc. IEEEInternational Symposium on Industrial Electronics, Corsica, May 2004, pp.827–832.
[16] X. Huang, X. Wang, T. Nergaard, J. S. Lai, X. Xu, and L. Zhu, “Parasiticringing and design issues of digitally controlled high power interleaved boostconverters,” IEEE Trans. Power Electron., vol. 19, no. 5, pp. 1341–1352,Sep. 2004.
[17] S. Chandrasekaran and L. Gokdere, “Integrated magnetics for interleavedDC-DC boost converter for fuel cell powered vehicles,” in Proc. IEEE PowerElectronics Specialists Conference (PESC’04), Aachen, Germany, Jun. 2004,pp. 356–361.
[18] K. Wang, C. Lin, L. Zhu, D. Qu, F. Lee, and J. Lai, “Bi-directional DC to DCconverters for fuel cell systems,” in Proc. IEEE workshop Power Electronicsin Transportation, Dearborn, MI, USA, Oct. 1998, pp. 47–51.
[19] K. Wang, L. Zhu, D. Qu, H. Odendaal, J. Lai, and F. Lee, “Design, im-plementation, and experimental results of bidirectional full-bridge DC-DCconverter with unified soft-switching scheme and soft-starting capability,” inProc. IEEE Power Electronics Specialists Conference (PESC’00), Jun. 2000,pp. 1058–1063.
[20] L. Zhu, “A novel soft-commutating isolated boost full-bridge ZVS-PWMDC-DC converter for bi-directional high power applications,” in Proc. IEEEPower Electronics Specialists Conference (PESC’04), Aachen, Germany,Jun. 2004, pp. 2141–2146.

BIBLIOGRAPHY 287
[21] S. Jang, T. Lee, W. Lee, and C. Won, “Bi-directional DC-DC converter forfuel cell generation system,” in Proc. IEEE Power Electronics SpecialistsConference (PESC’04), Aachen, Germany, Jun. 2004, pp. 4722–4728.
[22] M. Jain, M. Daniele, and P. K. Jain, “A bidirectional DC-DC convertertopology for low power application,” IEEE Trans. Power Electron., vol. 15,no. 4, pp. 595–606, Jul. 2000.
[23] R. W. De Doncker, D. M. Divan, and M. H. Kheraluwala, “A three-phasesoft-switched high-power-density DC/DC converter for high-power applica-tions,” IEEE Trans. Ind. Appl., vol. 27, no. 1, pp. 63–73, Jan./Feb. 1991.
[24] M. H. Kheraluwala, R. W. Gascoigne, D. M. Divan, and E. D. Baumann,“Performance characterization of a high-power dual active bridge DC-to-DCconverter,” IEEE Trans. Ind. Appl., vol. 28, no. 6, pp. 1294–1301, Nov./Dec.1992.
[25] K. Vangen, T. Melaa, S. Bergsmark, and R. Nilsen, “Efficient high-frequencysoft-switched power converter with signal processor control,” in Proc. IEEETelecommunications Energy Conference (INTELEC’91), Nov. 1991, pp. 631–639.
[26] K. Vangen, T. Melaa, and A. K. Adnanes, “Soft-switched high-frequency,high power DC/AC converter with IGBT,” in Proc. IEEE Power ElectronicsSpecialists Conference (PESC’92), Jun. 1992, pp. 26–33.
[27] K. Vangen, T. Melaa, A. K. Adnanes, and P. E. Kristiansen, “Dual activebridge converter with large soft-switching range,” in Proc. Fifth EuropeanConference on Power Electronics and Applications (EPE’93), Sep. 1993, pp.328–333.
[28] J. M. Zhang, D. M. Xu, and Z. Qian, “An improved dual active bridgeDC/DC converter,” in Proc. IEEE Power Electronics Specialists Conference(PESC’01), Vancouver, BC, Canada, Jun. 2001, pp. 232–236.
[29] J. Zhang, F. Zhang, X. Xie, D. Jiao, and Z. Qian, “A novel ZVS DC/DC con-verter for high power applications,” IEEE Trans. Power Electron., vol. 19,no. 2, pp. 420–429, Mar. 2004.
[30] G. Chen, D. Xu, Y. Wang, and Y. Lee, “A new family of soft-switchingphase-shift idirectional DC-DC converters,” in Proc. IEEE Power Electron-ics Specialists Conference (PESC’01), Jun. 2001, pp. 859–865.
[31] J. Wang, F. Z. Peng, J. Anderson, A. Joseph, and R. Buffenbarger, “Lowcost fuel cell converter system for residential power generation,” IEEE Trans.Power Electron., vol. 19, no. 5, pp. 1315–1322, Sep. 2004.
[32] H. Li, F. Z. Peng, and J. S. Lawler, “A natural ZVS medium-power bidi-rectional DC-DC converter with minimum number of devices,” IEEE Trans.Ind. Appl., vol. 39, no. 2, pp. 525–535, Mar./Apr. 2003.

288 BIBLIOGRAPHY
[33] R. Gopinath, S. Kim, J. H. Hahn, P. N. Enjeti, M. B. Yeary, and J. W.Howze, “Development of a low cost fuel cell inverter system with DSP con-trol,” IEEE Trans. Power Electron., vol. 19, no. 5, pp. 1256–1262, Sep. 2004.
[34] Y. Song and P. Enjeti, “A high frequency link direct DC-AC converter forresidential fuel cell power systems,” in Proc. IEEE Power Electronics Spe-cialists Conference (PESC’04), Aachen, Germany, Jun. 2004, pp. 4755–4761.
[35] A. M. Tuckey and J. N. Krase, “A low-cost inverter for domestic fuelcell applications,” in Proc. IEEE Power Electronics Specialists Conference(PESC’02), Cairns, Jun. 2002, pp. 339–346.
[36] W. Choi, P. Enjeti, and J. W. Howze, “Fuel cell powered UPS systems: de-sign considerations,” in Proc. IEEE Power Electronics Specialists Conference(PESC’03), Jun. 2003, pp. 385–390.
[37] G. K. Andersen, C. Klumpner, S. B. Kjaer, and F. Blaabjerg, “A new greenpower inverter for fuel cells,” in Proc. IEEE Power Electronics SpecialistsConference (PESC’02), Cairns, Jun. 2002, pp. 727–733.
[38] H. Xu, L. Kong, and X. Wen, “Fuel cell power system and high power DC-DC converter,” IEEE Trans. Power Electron., vol. 19, no. 5, pp. 1250–1255,Sep. 2004.
[39] Y. Jang and M. Jovanovic, “A new family of full-bridge ZVS converter,”IEEE Trans. Power Electron., vol. 19, no. 3, pp. 701–708, May 2004.
[40] J. T. Kim, T. W. Lee, S. J. Jang, and C. Won, “An active clampingcurrent-fed half-bridge converter for fuel-cell generation systems,” in Proc.IEEE Power Electronics Specialists Conference (PESC’04), Aachen, Ger-many, Jun. 2004, pp. 4709–4714.
[41] C. Liu, A. Johnson, and J. S. Lai, “Modeling and control of a novel six-legthree-phase high-power converter for low voltage fuel cell applications,” inProc. IEEE Power Electronics Specialists Conference (PESC’04), Aachen,Germany, Jun. 2004, pp. 4715–4721.
[42] C. Liu, A. Ridenour, and J.-S. Lai, “Modeling and control of a novel six-leg three-phase high-power converter for low voltage fuel cell applications,”IEEE Trans. Power Electron., vol. 21, no. 5, pp. 1292–1300, Sep. 2006.
[43] H. Ertl, J. W. Kolar, and F. C. Zach, “A novel multicell DC-AC converterfor applications in renewable energy systems,” IEEE Trans. Ind. Electron.,vol. 49, no. 5, pp. 1048–1057, Oct. 2002.
[44] B. Ozpineci, L. M. Tolbert, G. J. Su, and Z. Du, “Optimum fuel cell utiliza-tion with multilevel DC-DC converters,” in Proc. IEEE Applied Power Elec-tronics Conference and Exposition (APEC’04), Anaheim, California, Feb.2004, pp. 1572–1576.

BIBLIOGRAPHY 289
[45] H. Matsuo, T. Shigemizu, F. Kurokawa, and N. Watanabe, “Characteristicof the multiple-input DC-DC converter,” in Proc. IEEE Power ElectronicsSpecialists Conference (PESC’93), Seattle, WA, USA, Jun. 1993, pp. 115–120.
[46] H. Matsuo, K. Kobayashi, Y. Sekine, M. Asano, and L. Wenzhong, “Novelsolar cell power supply system using the multiple-input DC-DC converter,”in Proc. IEEE Telecommunications Energy Conference (INTELEC’98), SanFrancisco, CA, USA, Nov. 1998, pp. 797–802.
[47] H. Matsuo, W. Lin, F. Kurokawa, T. Shigemizu, and N. Watanabe, “Charac-teristic of the multiple-input DC-DC converter,” IEEE Trans. Ind. Electron.,vol. 51, no. 3, pp. 625–631, Jun. 2004.
[48] Y. M. Chen and Y. C. Liu, “Development of multi-port converters for hybridwind-photovoltaic power system,” in Proc. IEEE Region 10 InternationalConference on Electrical and Electronic Technology, Aug. 2001, pp. 804–808.
[49] B. G. Dobbs and P. L. Chapman, “A multiple-input DC-DC converter topol-ogy,” IEEE Power Electronics Letters, vol. 1, no. 1, pp. 6–9, Mar. 2003.
[50] N. D. Benavides and P. L. Chapman, “Power budgeting of a multiple-inputbuck-boost converter,” IEEE Trans. Power Electron., vol. 20, no. 6, pp.1303–1309, Nov. 2005.
[51] M. Michon, J. L. Duarte, M. Hendrix, and M. G. Simoes, “A three-portbi-directional converter for hybrid fuel cell systems,” in Proc. IEEE PowerElectronics Specialists Conference (PESC’04), Aachen, Germany, Jun. 2004,pp. 4736–4742.
[52] C. Zhao and J. W. Kolar, “A novel three-phase three-port UPS employinga single high-frequency isolation transformer,” in Proc. IEEE Power Elec-tronics Specialists Conference (PESC’04), Aachen, Germany, Jun. 2004, pp.4135–4141.
[53] D. Liu and H. Li, “A ZVS bi-directional DC-DC converter for multiple energystorage elements,” IEEE Trans. Power Electron., vol. 21, no. 5, pp. 1513–1517, Sep. 2006.
[54] Y. M. Chen, Y. C. Liu, and F. Y. Wu, “Multi-input DC/DC converter basedon the multiwinding transformer for renewable energy applications,” IEEETrans. Ind. Appl., vol. 38, no. 4, pp. 1096–1104, Jul./Aug. 2002.
[55] L. Solero, F. Caricchi, F. Crescimbini, O. Honorati, and F. Mezzetti, “Perfor-mance of a 10 kW power electronic interface for combined wind/PV isolatedgenerating systems,” in Proc. IEEE Power Electronics Specialists Conference(PESC’96), Jun. 1996, pp. 1027–1032.
[56] F. Caricchi, F. Crescimbini, A. D. Napoli, O. Honorati, and E. Santini, “Test-ing of a new DC-DC converter topology for integrated wind-photovoltaic

290 BIBLIOGRAPHY
generating systems,” in Proc. 5th European Conference on Power Electron-ics and Applications, Brighton, UK, Sep. 1993, pp. 83–88.
[57] M. Marchesoni and C. Vacca, “New DC-DC converter for energy storagesystem interfacing in fuel cell hybrid electric vehicles,” IEEE Trans. PowerElectron., vol. 22, no. 1, pp. 301–308, Jan. 2007.
[58] H. Al-Atrash, F. Tian, and I. Batarseh, “Tri-modal half-bridge convertertopology for three-port interface,” IEEE Trans. Power Electron., vol. 22,no. 1, pp. 341–345, Jan. 2007.
[59] H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “A soft-switched three-port bidirectional converter for fuel cell and supercapaci-tor applications,” in Proc. IEEE Power Electronics Specialists Conference(PESC’05), Recife, Brazil, Jun. 2005, pp. 2487–2493.
[60] H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “Multi-inputbidirectional DC-DC converter combining DC-link and magnetic-couplingfor fuel cell systems,” in Proc. IEEE Industry Application Society Conferenceand Annual Meeting (IAS’05), Hong Kong,China, Oct. 2005, pp. 2021–2028.
[61] H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “Triple-half-bridge bidirectional converter controlled by phase shift and PWM,” in Proc.IEEE Applied Power Electronics Conference and Exposition (APEC’06),Dallas, TX, Mar. 2006, pp. 1256–1262.
[62] H. Tao, J. L. Duarte, and M. A. M. Hendrix, “Line-interactive UPS using afuel cell as the primary source,” IEEE Trans. Ind. Electron., to be published.
[63] H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “Method foroperating a power converter in a soft switching range,” International PatentWO/2006/131 870, Dec. 14, 2006.
[64] H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “Family ofmultiport bidirectional DC-DC converters,” IEE Proceeding Electric PowerApplications, vol. 153, no. 3, pp. 451–458, May 2006.
[65] J. L. Duarte, M. Hendrix, and M. G. Simoes, “Three-port bidirectional con-verter for hybrid fuel cell systems,” IEEE Trans. Power Electron., vol. 22,no. 2, pp. 480–487, Mar. 2007.
[66] P. J. H. Wingelaar, J. L. Duarte, and M. A. M. Hendrix, “Computer con-trolled linear regulator for characterization of polymer electrolyte membranefuel cells PEMFC,” in Proc. IEEE International Symposium on IndustrialElectronics (ISIE’04), Ajaccio, France, Jun. 2004, pp. 821–826.
[67] G. D. Demetriades, “On small-signal analysis and control of the single- anddual-active bridge topologies,” Ph.D. dissertation, KTH, The Royal Instituteof Technology, Stockholm, Sweden, Apr. 2005.

BIBLIOGRAPHY 291
[68] H. Tao, J. L. Duarte, and M. A. M. Hendrix, “High-power three-port three-phase bidirectional DC-DC converter,” in Proc. IEEE Industry ApplicationSociety Conference and Annual Meeting (IAS’07), New Orleans, USA, Sep.2007, pp. 2022–2029.
[69] M. H. Kheraluwala, D. W. Novotny, and D. M. Divan, “Coaxially woundtransformers for high-power high-frequency applications,” IEEE Trans.Power Electron., vol. 7, no. 1, pp. 54–62, Jan. 1992.
[70] M. S. Rauls, D. W. Novotny, and D. M. Divan, “Design considerationsfor high-frequency coaxial winding power transformers,” IEEE Trans. Ind.Appl., vol. 29, no. 2, pp. 375–381, Mar./Apr. 1993.
[71] M. S. Rauls, D. W. Novotny, D. M. Divan, R. R. Bacon, and R. W.Gascoigne, “Multiturn high-frequency coaxial winding power transformers,”IEEE Trans. Ind. Appl., vol. 31, no. 1, pp. 112–118, Jan./Feb. 1995.
[72] H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “Design ofa soft-switched three-port converter with DSP control for power flow man-agement in hybrid fuel cell systems,” in Proc. 11th European Conferenceon Power Electronics and Applications (EPE’05), Dresden, Germany, Sep.2005, pp. 1–10.
[73] D. Xu, C. Zhao, and H. Fan, “A PWM plus phase-shift control bidirectionalDC-DC converter,” IEEE Trans. Power Electron., vol. 19, no. 3, pp. 666–675, May 2004.
[74] H. Tao, A. Kotsopoulos, J. L. Duarte, and M. A. M. Hendrix, “Transformer-coupled multiport ZVS bidirectional DC-DC converter with wide inputrange,” IEEE Trans. Power Electron., to be published.
[75] Y. Duan and H. Jin, “Digital controller design for switchmode power convert-ers,” in Proc. IEEE Applied Power Electronics Conference and Exposition(APEC’99), Dallas, TX, Mar. 1999, pp. 967–973.
[76] G. F. Franklin, J. D. Powell, and M. L. Workman, Digital control of dynamicsystems. Amsterdam: Addison-Wesley, 1998.
[77] D. M. Van de Sype, K. D. Gusseme, A. P. Van den Bossche, and J. A. A.Melkebeek, “A sampling algorithm for digitally controlled boost PFC con-verters,” IEEE Trans. Power Electron., vol. 19, no. 3, pp. 649–657, May2004.
[78] F281x Digital Motor Control Library (Digital PID Controller with Anti-windup), Literature Number: SPRC080(PID REG3), Texas Instruments,Feb. 2006.
[79] C. Zhao, S. Round, and J. W. Kolar, “Buck and boost start-up operationof a three-port power supply for hybrid vehicle applications,” in Proc. IEEEPower Electronics Specialists Conference (PESC’05), Recife, Brazil, Jun.2005, pp. 1851–1857.

292 BIBLIOGRAPHY
[80] G. J. Su and F. Z. Peng, “A low cost, triple-voltage bus DC-DC converterfor automotive applications,” in Proc. IEEE Applied Power Electronics Con-ference and Exposition (APEC’05), Mar. 2005, pp. 1015–1021.
[81] A. Cheriti, K. Al-Haddad, L. A. Dessaint, T. A. Meynard, and D. Mukhed-kar, “A rugged soft commutated PWM inverter for AC drives,” IEEE Trans.Power Electron., vol. 7, no. 2, pp. 385–392, Apr. 1992.
[82] R. W. De Doncker and J. P. Lyons, “The auxiliary resonant commutatedpole converter,” in Proc. IEEE Industry Application Society Conference andAnnual Meeting (IAS’90).
[83] A. Van den Bossche, V. Valtchev, J. Ghijselen, and J. Melkebeek, “Two-phase zero-voltage switching boost converter for medium power applica-tions,” in Proc. IEEE Industry Application Society Conference and AnnualMeeting (IAS’98), St. Louis, USA, Oct. 1998, pp. 1546–1553.
[84] H. Tao, J. L. Duarte, and M. A. M. Hendrix, “Variable hysteresisband and asymmetrical wave control of a low cost two-input converterwith zero-voltage switching,” in Proc. IEEE Young Researcher SymposiumIAS/PELS/PES Benelux chapter (YRS’06), Ghent, Belgium, Apr. 2006, pp.1–8.
[85] H. Tao, J. L. Duarte, and M. A. M. Hendrix, “Novel zero-voltage switchingcontrol methods for a multiple-input converter interfacing a fuel cell andsupercapacitor,” in Proc. IEEE The 32nd Annual Conference of the IEEEIndustrial Electronics Society (IECON’06), Paris, France, Nov. 2006, pp.2341–2346.
[86] H. Tao, J. L. Duarte, and M. A. M. Hendrix, “Three-port triple-half-bridgebidirectional converter with zero-voltage switching,” IEEE Trans. PowerElectron., to be published.
[87] J. G. Kassakian, M. F. Schlecht, and G. C. Verghese, Principle of PowerElectronics. Reading, MA: Addison-Wesley, 1991.
[88] D. C. Hamill, “Generalized small-signal dynamical modeling of multi-portDC-DC converters,” in Proc. IEEE Power Electronics Specialists Conference(PESC’97), St. Louis, MO, Jun. 1997, pp. 421–427.
[89] R. D. Middlebrook, “Small-signal modeling of pulse-width modulatedswitched-mode power converters,” Proceedings of the IEEE, vol. 76, no. 4,pp. 343–354, Apr. 1988.
[90] G. F. Franklin, J. D. Powell, and A. Emami-Naeini, Feedback Control ofDynamic Systems. Amsterdam: Addison-Wesley, 1994.
[91] D. Liu and H. Li, “A three-port three-phase DC-DC converter for hybridlow voltage fuel cell and ultracapacitor,” in Proc. IEEE The 32nd AnnualConference of the IEEE Industrial Electronics Society (IECON’06), Paris,France, Nov. 2006, pp. 2558–2563.

BIBLIOGRAPHY 293
[92] R. W. Erickson and D. Maksimovic, “A multiple-winding magnetics modelhaving directly measurable parameters,” in Proc. IEEE Power ElectronicsSpecialists Conference (PESC’98), Jun. 1998, pp. 1472–1478.
[93] H. Tao, J. L. Duarte, and M. A. M. Hendrix, “Analysis of power flow inmulti-active-bridge bidirectional DC-DC power converters,” InternationalJournal of Electronics, submitted for publication.
[94] R. Teodorescu and F. Blaabjerg, “Flexible control of small wind turbineswith grid failure detection operating in stand-alone and grid-connectedmode,” IEEE Trans. Power Electron., vol. 19, no. 5, pp. 1323–1332, Sep.2004.
[95] H. Tao, J. L. Duarte, and M. A. M. Hendrix, “A distributed fuel cellbased generation and compensation system to improve power quality,” inProc. IEEE International Power Electronics and Motion Control Confer-ence (IPEMC’06), Shanghai, China, Aug. 2006, pp. 1–5.
[96] D. N. Zmood and D. G. Holmes, “Stationary frame current regulation ofPWM inverters with zero steady-state error,” IEEE Trans. Power Electron.,vol. 18, no. 3, pp. 814–822, May 2003.
[97] R. Teodorescu, F. Blaabjerg, U. Borup, and M. Liserre, “A new controlstructure for grid-connected LCL PV inverters with zero steady-state errorand selective harmonic compensation,” in Proc. IEEE Applied Power Elec-tronics Conference and Exposition (APEC’04), Anaheim, USA, Feb. 2004,pp. 580–586.
[98] S. M. Silva, B. M. Lopes, B. J. C. Filho, R. P. Campana, and W. C.Boaventura, “Performance evaluation of PLL algorithms for single-phasegrid-connected systems,” in Proc. The 39th IEEE Industry Application So-ciety Conference and Annual Meeting (IAS’04), Seatle, USA, Oct. 2004, pp.2259–2263.
[99] H. Tao, J. L. Duarte, and M. A. M. Hendrix, “Control of grid-connectedinverters as used in small distributed generators,” in Proc. IEEE IndustryApplication Society Conference and Annual Meeting (IAS’07), New Orleans,USA, Sep. 2007, pp. 1574–1581.
[100] M. C. Benhabib and S. Saadate, “A new robust experimentally validatedphase locked loop for power electronic control,” European Power Electronicsand Drives Journal, vol. 15, no. 3, pp. 36–48, Aug. 2005.
[101] R. Tirumala, N. Mohan, and C. Henze, “Seamless transfer of grid-connectedPWM inverters between utility-interactive and stand-alone modes,” in Proc.IEEE Applied Power Electronics Conference and Exposition (APEC’02),Dallas, TX, USA, Mar. 2002, pp. 1081–1086.
[102] P. C. Loh, M. J. Newman, D. N. Zmood, and D. G. Holmes, “A comparativeanalysis of multiloop voltage regulation strategies for single and three-phase

294 BIBLIOGRAPHY
UPS systems,” IEEE Trans. Power Electron., vol. 18, no. 5, pp. 1176–1185,Sep. 2003.
[103] D. G. Holmes and D. A. Martin, “Implementation of a direct digital predic-tive current controllerfor single and three phase voltage source inverters,” inProc. The 31th IEEE Industry Application Society Conference and AnnualMeeting (IAS’96), San Diego, USA, Oct. 1996, pp. 906–913.
[104] S.-K. Chung, “A phase tracking system for three phase utility interface in-verters,” IEEE Trans. Power Electron., vol. 15, no. 3, pp. 431–438, May2000.
[105] J. W. Choi, Y. K. Kim, and H. G. Kim, “Digital PLL control for single-phasephotovoltaic system,” IEE Proceeding Electric Power Applications, vol. 153,no. 1, pp. 40–46, Jan. 2006.
[106] L. N. Arruda, S. M. Silva, and B. J. C. Filho, “PLL structures for utilityconnected systems,” in Proc. The 36th IEEE Industry Application SocietyConference and Annual Meeting (IAS’01), Chicago, USA, Oct. 2001, pp.2655–2660.
[107] D. W. Novotny and T. A. Lipo, Vector Control and Dynamics of AC Drives.New York: Oxford University Press, 1996.
[108] A. Kotsopoulos, J. L. Duarte, M. A. M. Hendrix, and P. J. M. Heskes, “Is-landing behaviour of grid-connected PV inverters operating under differentcontrol schemes,” in Proc. IEEE 33rd Power Electronics Specialists Confer-ence (PESC’02), Cairns, Jun. 2002, pp. 1506–1511.
[109] Single-Phase Inverter SEMISTACK, Model SKS40FB2C07V6, SEMIKRON,2006.
[110] F. Blaabjerg, R. Teodorescu, M. Liserre, and A. V. Timbus, “Overview ofcontrol and grid synchronization for distributed power generation systems,”IEEE Trans. Ind. Electron., vol. 53, no. 5, pp. 1398–1409, Oct. 2006.
[111] J. M. Correa, F. A. Farret, L. N. Canha, and M. G. Simoes, “Anelectrochemical-based fuel-cell model suitable for electrical engineering au-tomation approach,” IEEE Trans. Ind. Electron., vol. 51, no. 5, pp. 1103–1112, Oct. 2004.
[112] Z. Jiang and R. A. Dougal, “A compact digitally controlled fuel cell/batteryhybrid power source,” IEEE Trans. Ind. Electron., vol. 53, no. 4, pp. 1094–1104, Aug. 2006.
[113] G. Escobar, A. A. Valdez, , J. Leyva-Ramos, and P. Mattavelli, “Repetitive-based controller for a UPS inverter to compensate unbalance and harmonicdistortion,” IEEE Trans. Ind. Electron., vol. 54, no. 1, pp. 504–510, Feb.2007.

BIBLIOGRAPHY 295
[114] G. Willmann, D. F. Coutinho, L. F. A. Pereira, and F. B. Libano, “Multiple-loop H-Infinity control design for uninterruptible power supplies,” IEEETrans. Ind. Electron., vol. 54, no. 3, pp. 1591–1602, Jun. 2007.
[115] F. Botteron and H. Pinheiro, “A three-phase UPS that complies with thestandard IEC 62040-3,” IEEE Trans. Ind. Electron., vol. 54, no. 4, pp. 2120–2136, Aug. 2007.
[116] P. G. Barbosa, L. G. B. Rolim, E. H. Watanabe, and R. Hanitsch, “Controlstrategy for grid-connected DC-AC converters with load power factor cor-rection,” IEE Proc. Gener. Transm. Distrib., vol. 145, no. 5, pp. 487–491,Sep. 1998.
[117] S. A. O. da Silva, P. F. Donoso-Garcia, P. C. Cortizo, and P. F. Seixas, “Athree-phase line-interactive UPS system implementation with series-parallelactive power-line conditioning capabilities,” IEEE Trans. Ind. Appl., vol. 38,no. 6, pp. 1581–1590, Nov./Dec. 2002.
[118] F. S. Pai and S. J. Huang, “A novel design of line-interactive uninterruptiblepower supplies without load current sensors,” IEEE Trans. Power Electron.,vol. 21, no. 1, pp. 202–210, Jan. 2006.
[119] M. Illindala and G. Venkataramanan, “Control of distributed generationsystems to mitigate load and line imbalances,” in Proc. IEEE 33rd PowerElectronics Specialists Conference (PESC’02), Cairns, Australia, Jun. 2002,pp. 2013–2018.
[120] J. Yin, L. Chang, and C. Diduch, “A new hybrid anti-islanding algorithm ingrid connected three-phase inverter system,” in Proc. IEEE Power Electron-ics Specialists Conference (PESC’06), Jeju, Korea, Jun. 2006, pp. 1517–1523.
[121] J. S. Tepper, J. W. Dixon, G. Venegas, and L. Moran, “A simple frequency-independent method for calculating the reactive and harmonic current ina nonlinear load,” IEEE Trans. Ind. Electron., vol. 43, no. 6, pp. 647–654,Dec. 1996.
[122] M. P. Kazmierkowski and L. Malesani, “Current control techniques for three-phase voltage-source PWM converters: A survey,” IEEE Trans. Ind. Elec-tron., vol. 45, no. 5, pp. 691–703, Oct. 1998.
[123] H. Fujita and H. Akagi, “The unified power quality conditioner: the integra-tion of series and shunt-active filters,” IEEE Trans. Power Electron., vol. 13,no. 2, pp. 315–322, Mar. 1998.
[124] Y. W. Li, D. M. Vilathgamuwa, and P. C. Loh, “Microgrid power qualityenhancement using a three-phase four-wire grid-interfacing compensator,”IEEE Trans. Ind. Appl., vol. 41, no. 6, pp. 1707–1719, Nov./Dec. 2004.
[125] H. Tao, J. L. Duarte, and M. A. M. Hendrix, “High-resolution phase shiftand digital implementation of a fuel cell powered UPS system,” in Proc.

296 BIBLIOGRAPHY
12th European Conference on Power Electronics and Applications (EPE’07),Aalborg, Denmark, Sep. 2007, pp. 1–10.
[126] A. V. Peterchev and S. R. Sanders, “Quantization resolution and limit cy-cling in digitally controlled PWM converters,” IEEE Trans. Power Electron.,vol. 18, no. 1, pp. 301–308, Jan. 2003.
[127] H. Peng, D. Maksimovic, A. Prodic, and E. Alarcon, “Modeling of quantiza-tion effects in digitally controlled DC-DC converters,” in Proc. IEEE PowerElectronics Specialists Conference (PESC’04), Aachen, Germany, Jun. 2004,pp. 4312–4318.
[128] J. Chen, M. Ribeiro, R. Payseo, D. Zhou, J. R. Smith, and K. Kernahan,“DPWM time resolution requirements for digitally controlled DC-DC con-verters,” in Proc. IEEE Applied Power Electronics Conference and Exposi-tion (APEC’06), Dallas, TX, Mar. 2006, pp. 1127–1132.
[129] High-resolution pulse width modulator (HRPWM) reference guide, LiteratureNumber: SPRU924, Texas Instruments, Apr. 2005.
[130] eZdspTM F2808 USB Technical Reference, Spectrum Digital, Inc., 2004.
[131] Independence 1000TM Fuel Cell Operation & Maintenance Manual,102836R2, ReliOn, Inc., 2004.
[132] BOOSTCAPTM Ultracapacitor Module Operating Manual (for BMOD0115& BMOD0117), Part Number B-FO-0091, Maxwell Technologies, Inc., 2003.

Samenvatting
Het is het doel van dit proefschrift om te onderzoeken hoe milieuvriendelijke ener-giebronnen zoals brandstof- en zonnecellen, in combinatie met geschikte opslagele-menten zoals accu’s en supercondensatoren, het best geıntegreerd kunnen wordenin energiesystemen voor huishoudelijke toepassing. In deze context omvat het on-derzoeksgebied de meerpoorts bidirectionele gelijkspanningsomzettertopologie, hetmodelleren en besturen van vermogensomzetters, manieren om energie op te slaan,de besturing van vermogensstromen in elektronische systemen, de verbinding methet publieke elektriciteitsnet, en het bewaken van de energiekwaliteit.
Teneinde de primaire energiedragers met een energieopslagmogelijkheid te kun-nen integreren is het voorstel om een meerpoortssysteemstructuur te gebruiken.Omdat een meerpoortsomzetter de energie slechts in een enkele trap transformeertbelooft dit effectiever te zijn dan de meer omzetters vereisende conventionele aan-pak.
Een uitgebreide topologiestudie heeft geresulteerd in een familie van meer-poorts bidirectionele gelijkspanningsomzetters die gebaseerd is op een aantal bidi-rectionele schakelaarconfiguraties en een gegeneraliseerde topologie die een gelijk-spanningsbuffer met magnetische koppelingen combineert. Een meerpoorts bidi-rectionele gelijkspanningsomzetter kan geconstrueerd worden uit de beschrevenbidirectionele schakelaarconfiguraties. Het getoonde omzetterconcept staat toeom vermogensbronnen die onderling zeer verschillende eigenschappen hebben metelkaar te integreren. Daar bovenop worden, op basis van een tijdverschoven par-allelschakelingsidee, oplossingen voor hoogvermogenstoepassing voorgesteld. Deeerder genoemde bidirectionele schakelaar basisconfiguratie is zo uitgebreid dat zijin meerfazig tijdverschoven bedrijf kan werken.
De implementatie is gericht op een driepoorts energieregelingssysteem. Drieomzettervarianten zijn daarvoor ontwikkeld, te weten, de driepoorts actieve brug(TAB) omzetter, een tweepoorts bidirectionele omzetter die een gelijkspannings-buffer met magnetische koppeling combineert, en de trio-halve-brug (THB) omzet-ter. Als uitgewerkt voorbeeld zijn deze drie systemen getoond met een brandstofcelals opwekker en een supercondensator als opslagmedium. Het driepoortsysteemis beschreven met een door middeling bepaald circuit model, en er is een bes-turingsstrategie ontwikkeld die gebaseerd is op een meerlusterugkoppelingsschemadat gericht is op zowel nauwkeurige regulatie van de uitgangsspanning als op het
297

298 Samenvatting
voorkomen van belastingsvariaties die de werking van de primaire bron nadeligzouden kunnen beınvloeden.
Teneinde de specifieke werkcondities van bronnen en opslagelementen (bijvoor-beeld een grote spanningsvariatie) recht te kunnen doen werden diverse verbeterin-gen op de voorgestelde omzetterstructuren gerealiseerd. Deze verbeteringen zijngericht op het bereiken van verliesvrij schakelen, vermindering van de stroomampli-tudes, en een hogere werkingsgraad. De ontwikkelde besturingsmethodes zijn aan-uit ratio (volt-seconden balans) regeling voor de driepoorts TAB omzetter, vari-abele hystereseband regeling, en regelen door controle van de golfvorm-asymmetrie.
De drie omzettertopologieen zijn geverifieerd aan de hand van laboratoriumpro-totypes. De werking van de omzetters is bekeken met een gesloten-lus regeling diegeımplementeerd is met verschillende digitale signaalprocessoren (DSPs). De ver-mogensstromen in het systeem bleken beheersbaar te zijn. Er werd een substantieleverbetering van de werkingsgraad ten gevolge van de toegepaste verliesvrij-schakelentechniek geconstateerd. Praktische problemen met het gecontroleerd aanlopen vanhet systeem en het verkrijgen van de benodigde zeer hoge resolutie fasedraaiingzijn beschreven.
Het tweede deel van het werk is de besturing van de pulsbreedte gemoduleerdeinverter (PWM) en de aansluiting op het openbare net van een klein energielever-ingsysteem met in acht nemen van de kwaliteit van de geleverde energie. Kleinegedistribueerde generatiesystemen (DG) leveren lokaal energie als het openbarenet wegvalt, en kunnen potentieel de energiekosten verlagen als ze gebruikt wor-den tijdens de piekuren. Een zeer nauwkeurige PLL voor een een-fasige omzetteris gerealiseerd door middel van een virtueel-quadratuursignaalgenerator op basisvan een vertragingslijn, samen met een orthogonaal filter dat de PLL kwaliteit ver-hoogd als de netspanning vervormd is. Resonante regelaars zijn gebruikt teneindenul eindfout te krijgen in zowel de spannings- als de stroomlus, en om selectiefharmonischen te kunnen compenseren. Bij gebruik in een-fasige inverters elim-ineren proportioneel resonante (PR) regelaars de eindfout en zijn stabieler dan depropotioneel-integrerende (PI) regelaar.
Een netinteractief brandstofcel UPS/DG systeem is voorgesteld, ontworpen engetest. De energie conversie gebeurt in een TAB omzetter en een op het open-bare net aangesloten inverter. Dit systeem is zo flexibel dat het onafhankelijk ofin netverbonden bedrijf kan werken. Een automatische en geleidelijke overgangtussen de twee werkingstoestanden is gerealiseerd met een halfgeleiderschakelaaren door het op laten lopen van het referentiesignaal in een paar opeenvolgendenet cycli tijdens de overgang. Een opwekkingssysteem kan tegelijkertijd als actieffilter worden gebruikt teneinde lokaal opgewekte harmonischen te onderdrukken.Een dergelijke actieve filterfunctie is gerealiseerd in het voorgestelde systeem doorenkel de besturingssoftware aan te passen. Het is aangetoond dat de superconden-sator in het voorgestelde systeem compenseert voor instantane energiefluctuaties,de langzame dynamiek van de brandstofcel onzichtbaar weet te maken, en de doorde inverter veroorzaakte rimpel in de afgenomen energie adequaat afhandelt. Ditvoordeel elimineert de anders noodzakelijke energiebuffers in de rest van het sys-teem, mits de TAB voldoende regelbandbreedte beschikbaar heeft.

Acknowledgments
This thesis is the result of the four-year PhD research work carried out in theElectromechanics and Power Electronics (EPE) group of the Eindhoven Universityof Technology (TU/e), under the financial support of the Dutch funding agencyfor university research, the Technology Foundation STW. Many people helped meduring my stay in the group. Now, I would like to take this opportunity to thankthem.
First of all, I would like to thank Prof. Andre Vandenput, my first supervisor,for accepting me as a PhD student after the video meeting in July 2003, forencouraging me and guiding my research throughout the four years, and for hiscareful reading and many comments to improve the text. I want to express my deepappreciation of his excellent management skills and great personality. I certainlylearned a lot from him.
I would like to express my profound gratitude to Jorge Duarte, my daily su-pervisor, my colleague, and best of all, a friend, not only for his guidance andconstant support during the entire project, but also for the concern of my dailylife outside the university. He gave me the benefit of his knowledge and experiencein various aspects of both work and life.
My sincere thankfulness also goes to my weekly supervisor, Marcel Hendrix,for the inspiring discussions and the guidance throughout the four years. I shouldmention that Marcel translated the summary of this thesis into the samenvatting.I also thank him for his quick and careful reading and numerous comments toimprove the text. I must also acknowledge the contribution of Philips Lighting inEindhoven, where Marcel works as a Senior Principal Engineer, for providing themagnetic components and some materials used in the prototype.
I had the pleasure of working with Andrew Kotsopoulos, the postdoc who spenttwo years on this project. I appreciate his early work on the project and assistanceduring my first year in the group.
I am also very thankful to my second supervisor, Prof. Xiangning He fromZhejiang University, without whose motivation and encouragement I would nothave considered pursuing a doctor degree. I thank him for traveling far away fromChina to visit me in Eindhoven in May 2006 and to attend my defense ceremonyin Jan 2008.
Furthermore, I want to convey my deep gratitude to the core committee mem-
299

300 Acknowledgments
bers for their interest and insightful comments and criticisms, and for the precioustime they spent on reviewing my thesis. The core committee consists of, in addi-tion to my supervisors, the following professors:
– prof.dr.ir. R.W. De Doncker (RWTH Aachen, Germany)
– prof.dr.ir. A. Van den Bossche (Ghent University, Belgium)
– prof.dr.ir. J.H. Blom (Eindhoven University of Technology)
I would also like to thank the Technology Foundation STW for providing fi-nancial support to this project.
Moreover, I wish to thank all the staff members and PhD students of the EPEgroup for the wonderful working atmosphere. They are all very nice people andtheir support makes this research a possible and enjoyable one. In particular,I would like to thank Marijn for the assistance in building the prototype and,especially, for helping me moving furniture from Ikea to my new home in thesummer of 2006.
Finally, special thanks are due to my family. I am very grateful to my parentsfor their patience and support. I appreciate, from the bottom of my heart, mywife, Yanmei, without whose love, understanding, encouragement, support, andcommitment, I would not have finished this thesis.
Haimin TaoEindhoven, November 2007

Curriculum vitae
Haimin Tao was born in Zhejiang, China in December 1976. He received theBSc degree in electrical engineering from Zhejiang University, Hangzhou China, inJuly 2000. In March 2003 he received the MSc degree in Power Electronics andDrive Systems from the same university. His Master’s thesis is titled “Design ofhigh-voltage high-frequency inverters with high-power output for corona surfacetreatment of plastic film”.
From June 2003 to January 2004, he worked for Philips Lighting Electronicsas an R&D engineer in the Global Development Center in Shanghai, China. Hismain task was to simulate and model electronic ballast circuits and fluorescentlamps by using Saber and Pspice.
From January 2004 to January 2008, he carried out the PhD research projectthat led to this thesis in the Electromechanics and Power Electronics (EPE) groupof the Electrical Engineering department of the Eindhoven University of Technol-ogy (TU/e). His current research fields of interest include multiport and bidi-rectional converters, grid-connected inverters, digital control, soft-switching tech-niques, and sustainable energy systems.
301